
Functional Evaluation Using Fuzzy FMEA for a Non-Invasive Measurer for Methane and Carbone Dioxide

 ,
,  ,
,
Abstract
:1. Introduction
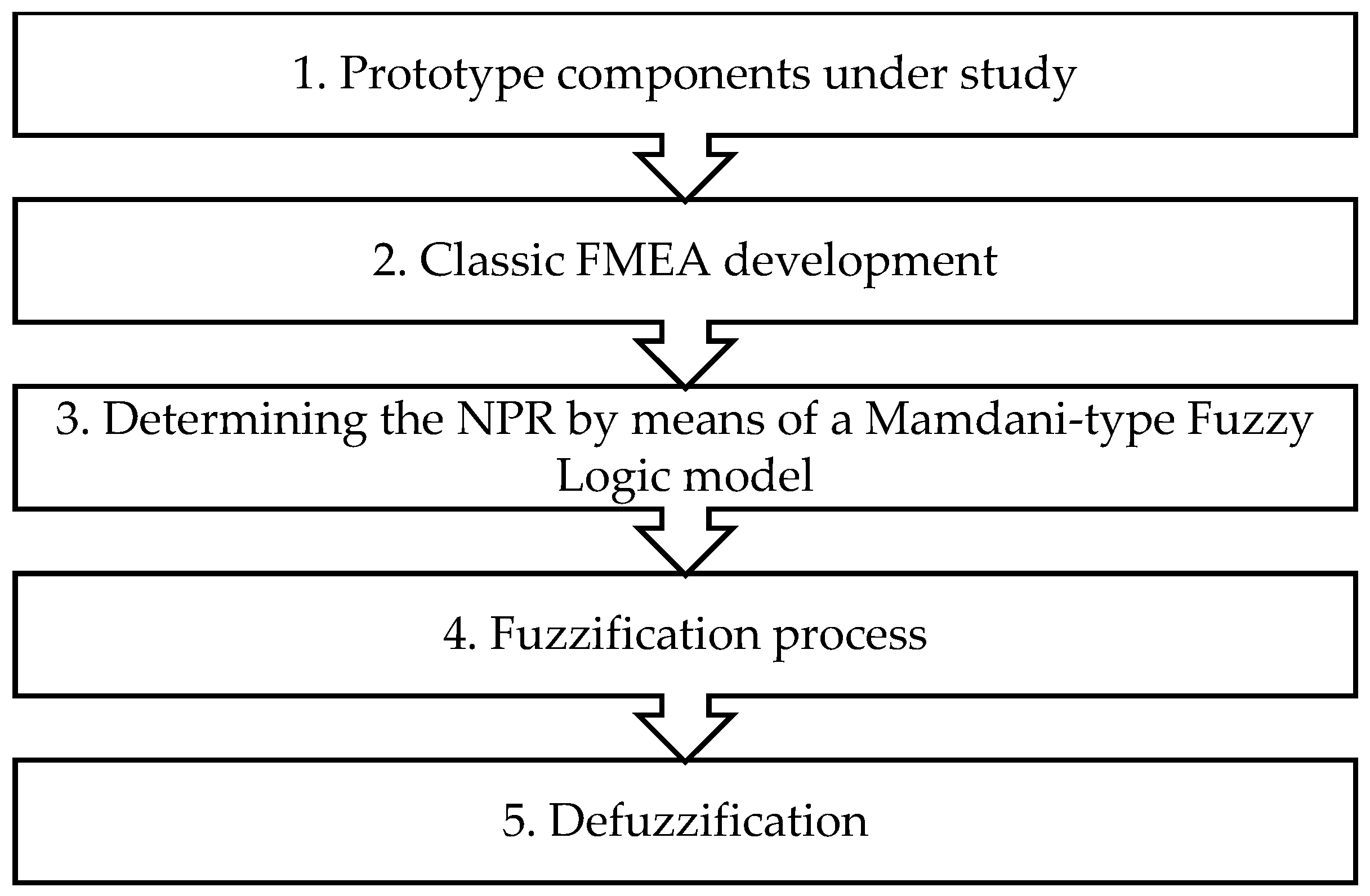
2. Materials and Methods
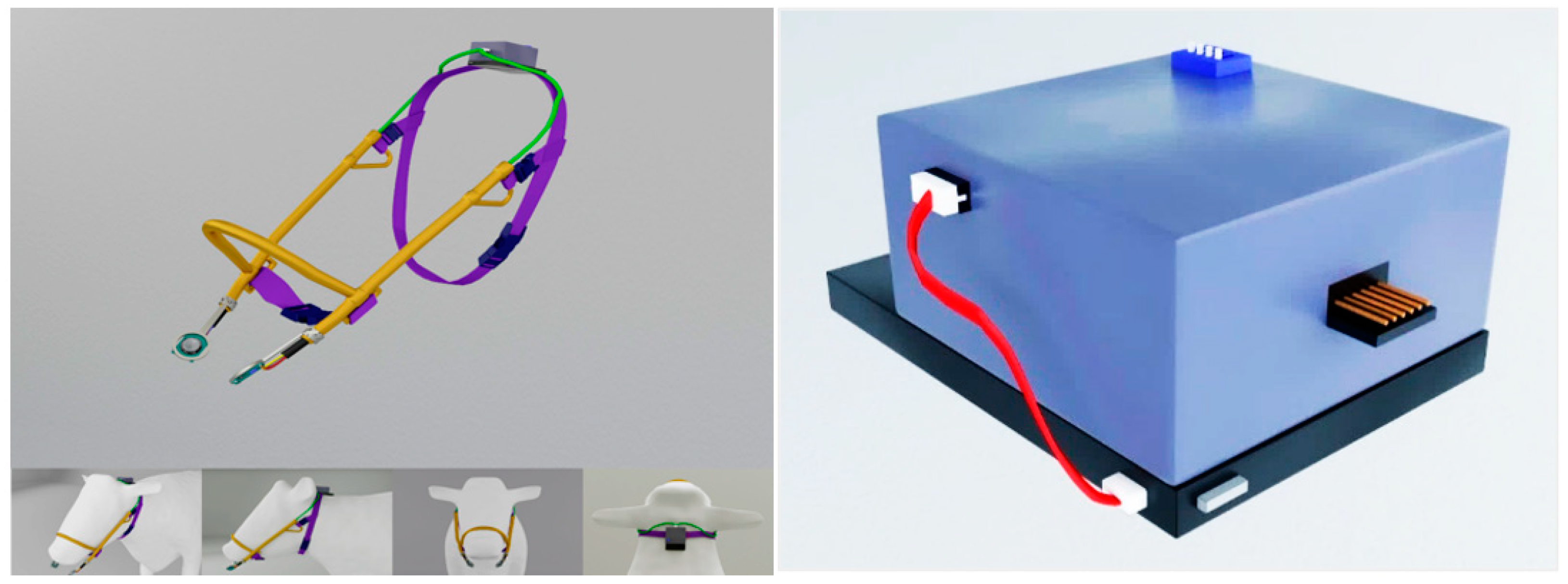
2.1. Prototype Description
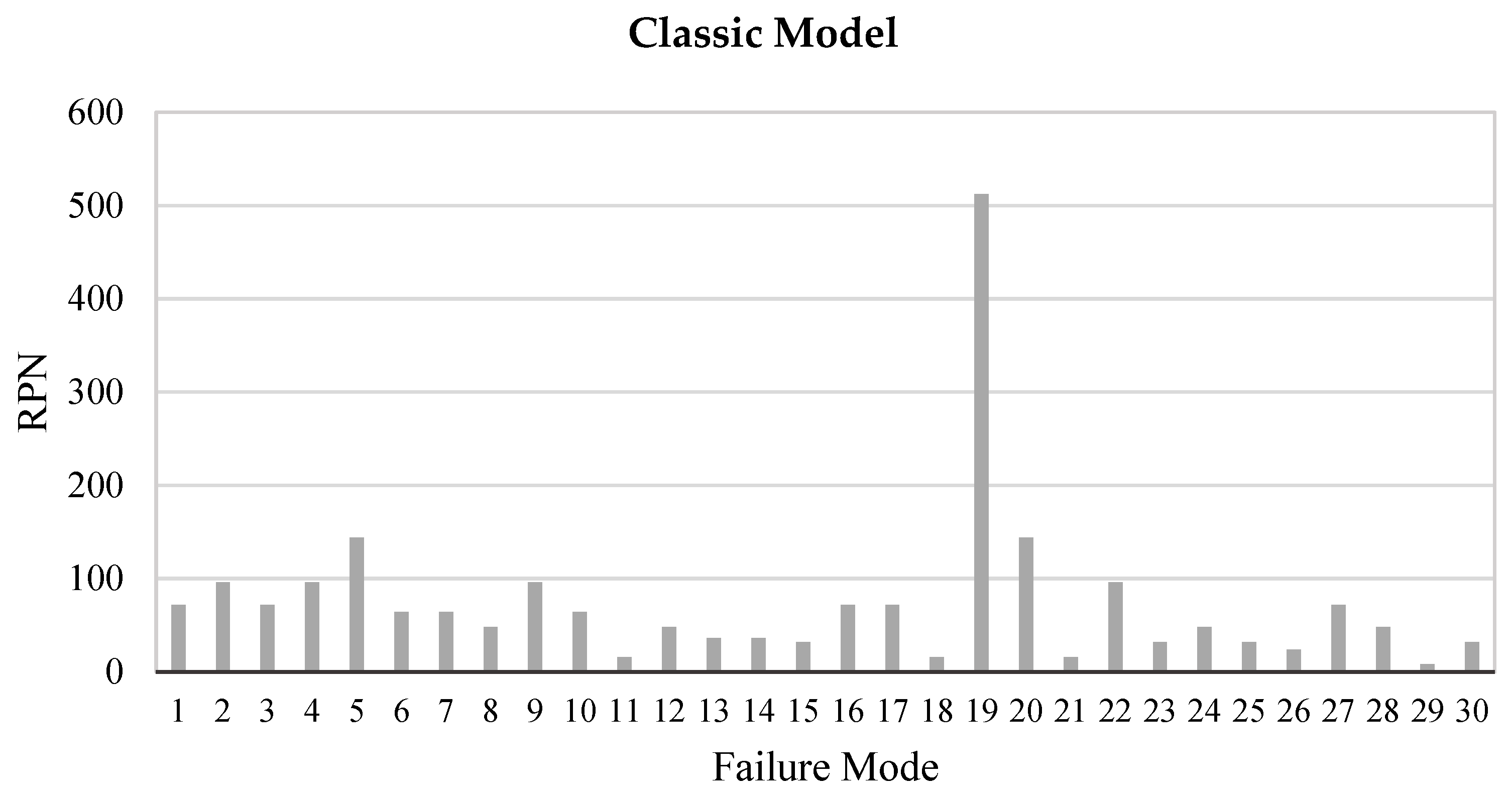
2.2. Classic FMEA Development
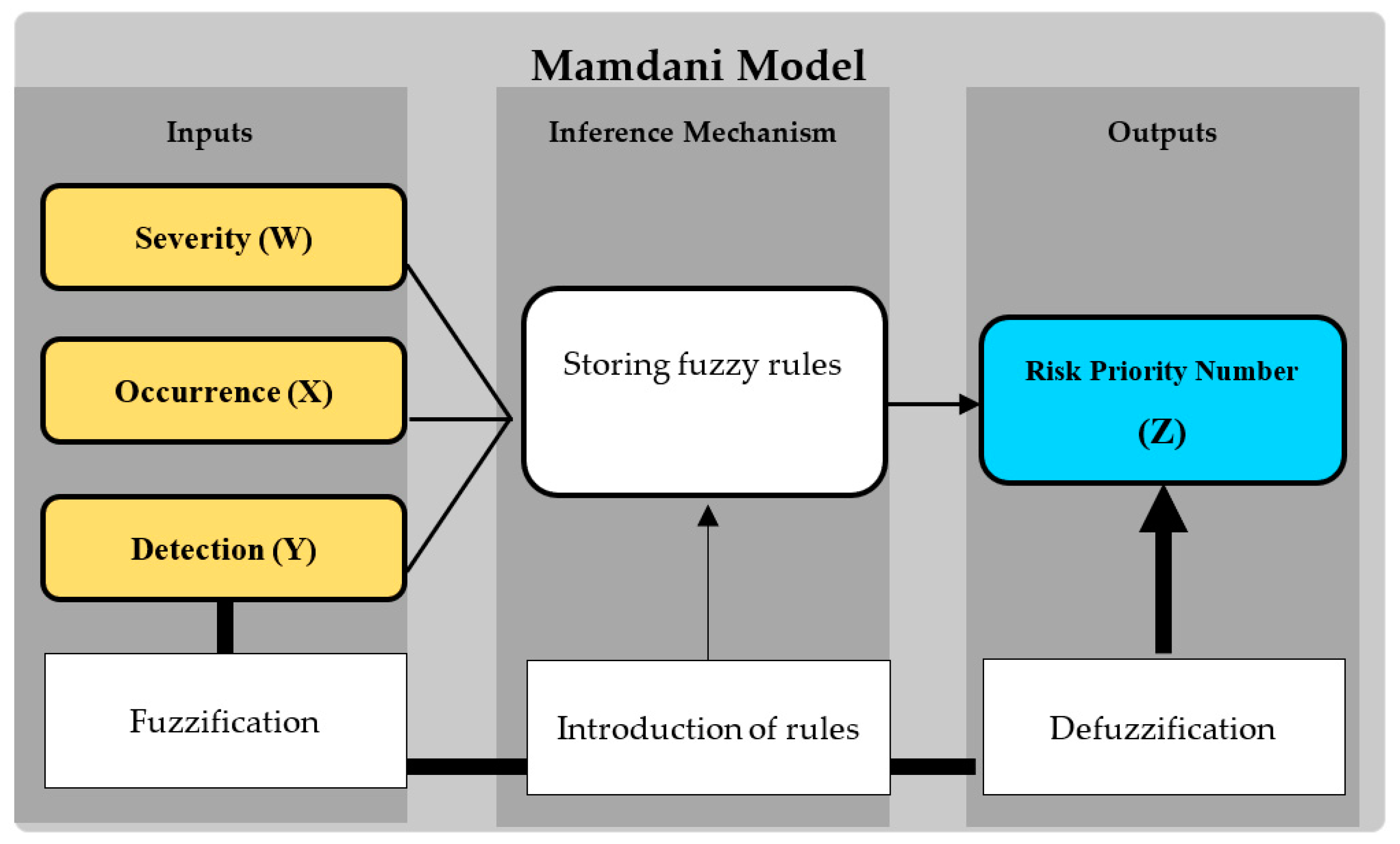
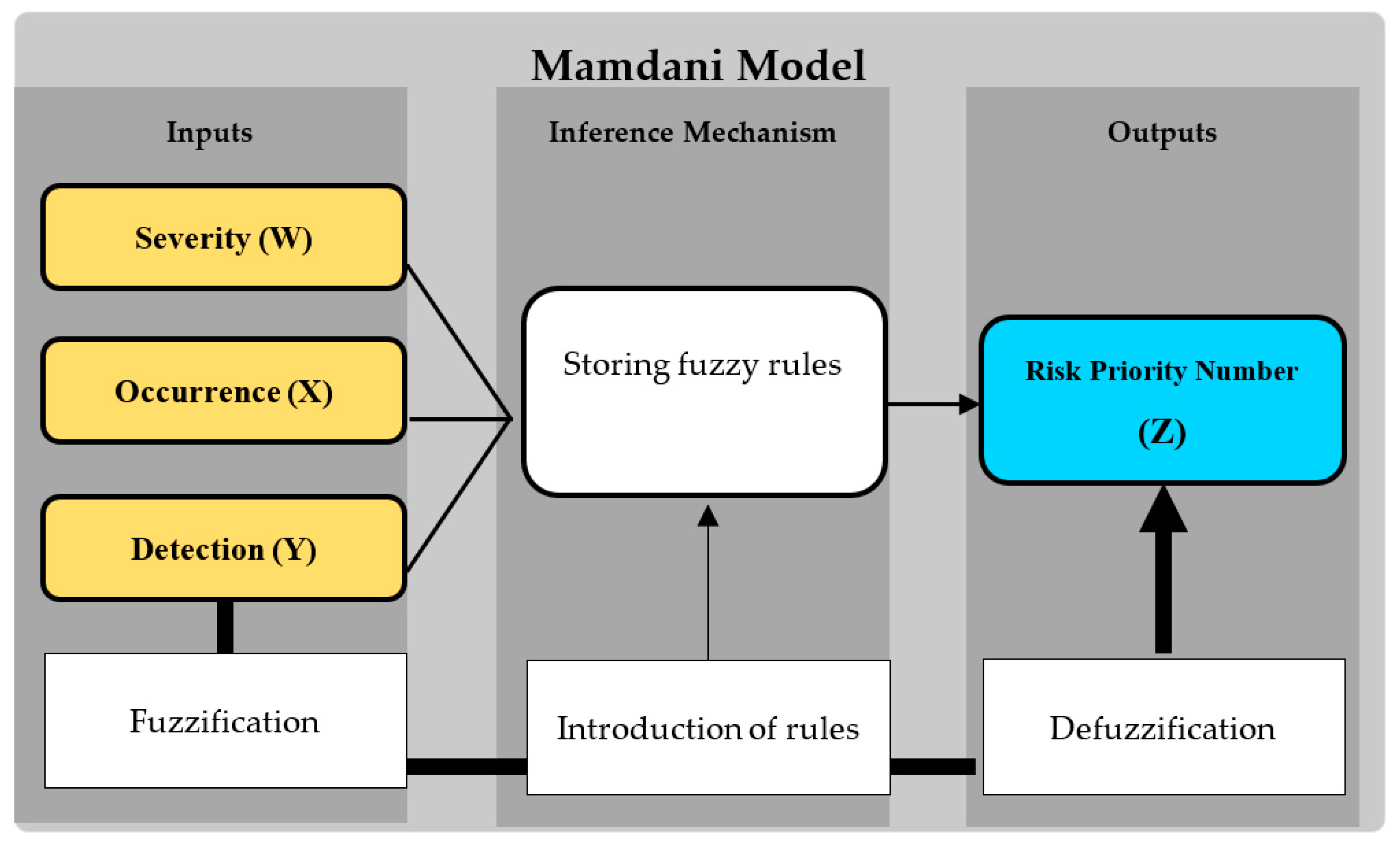
2.3. NPR through a Mamdani-Type Fuzzy Logic Model3
Model Architecture
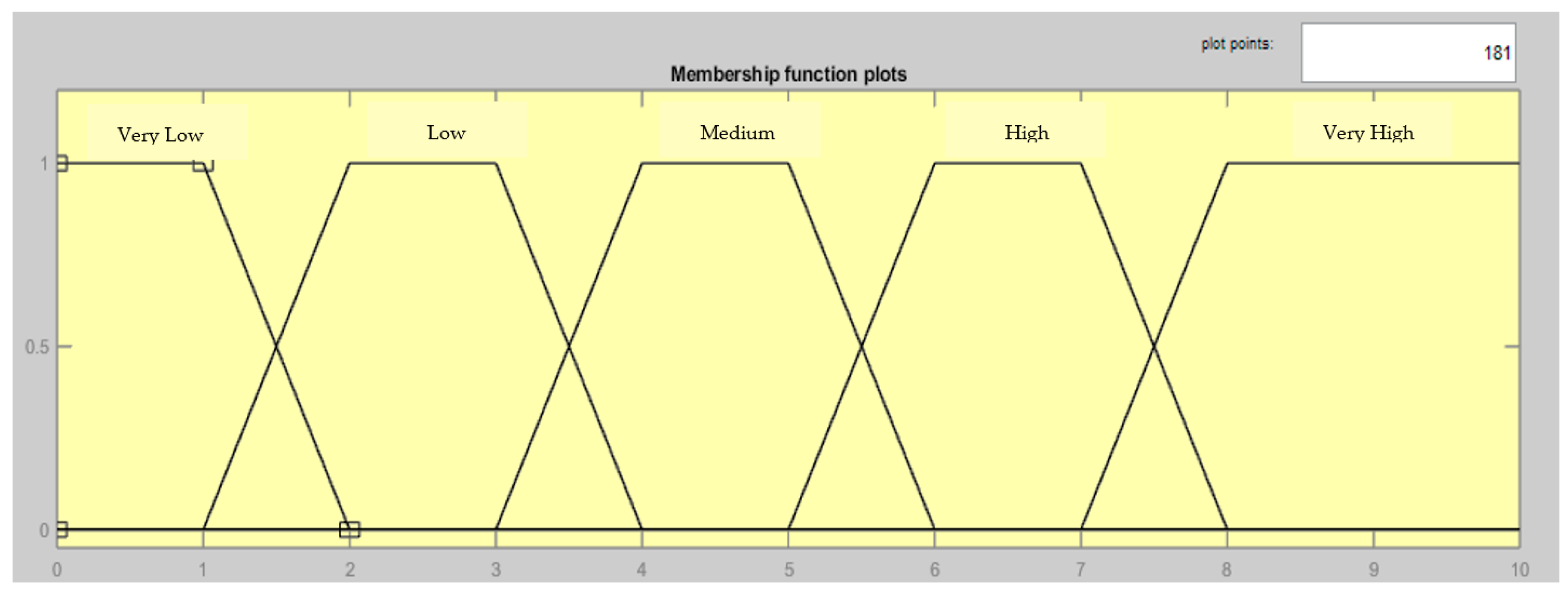
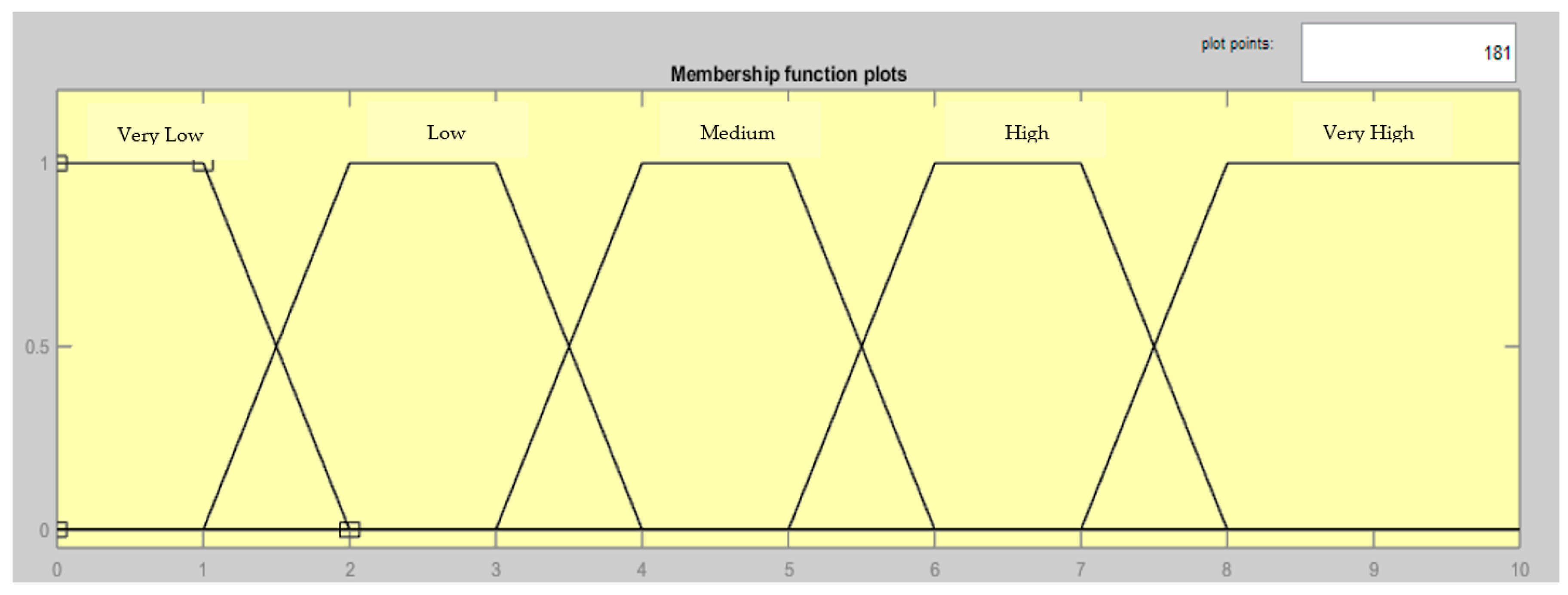
2.4. Fuzzification Process
3. Results
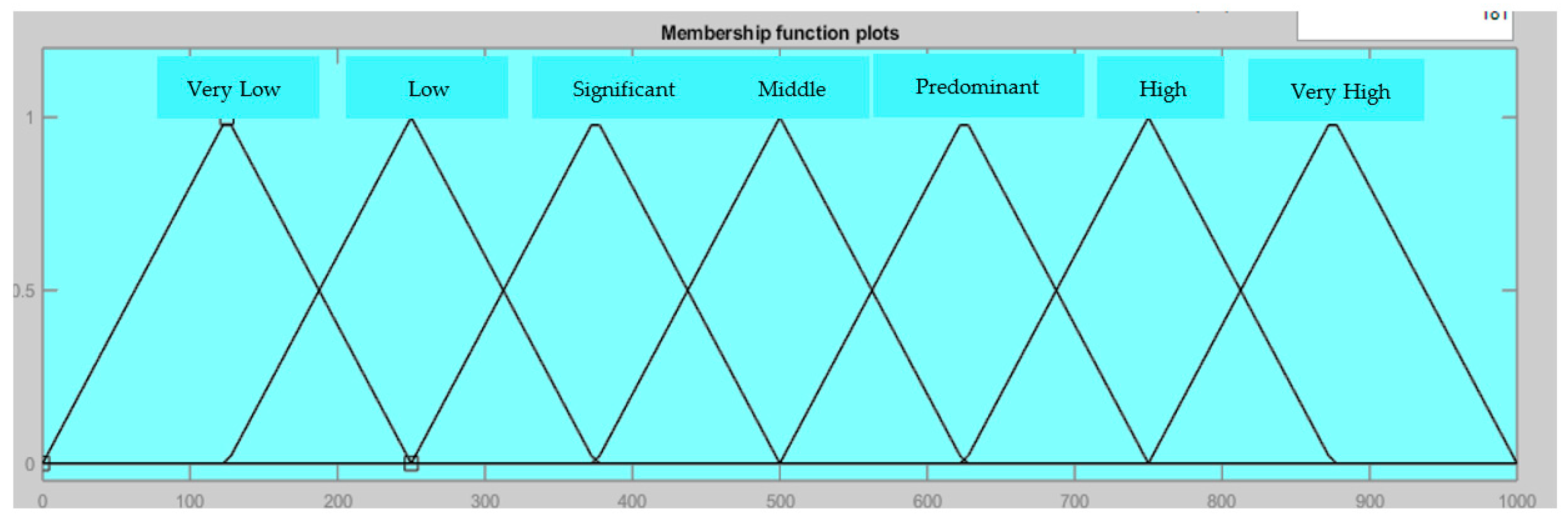
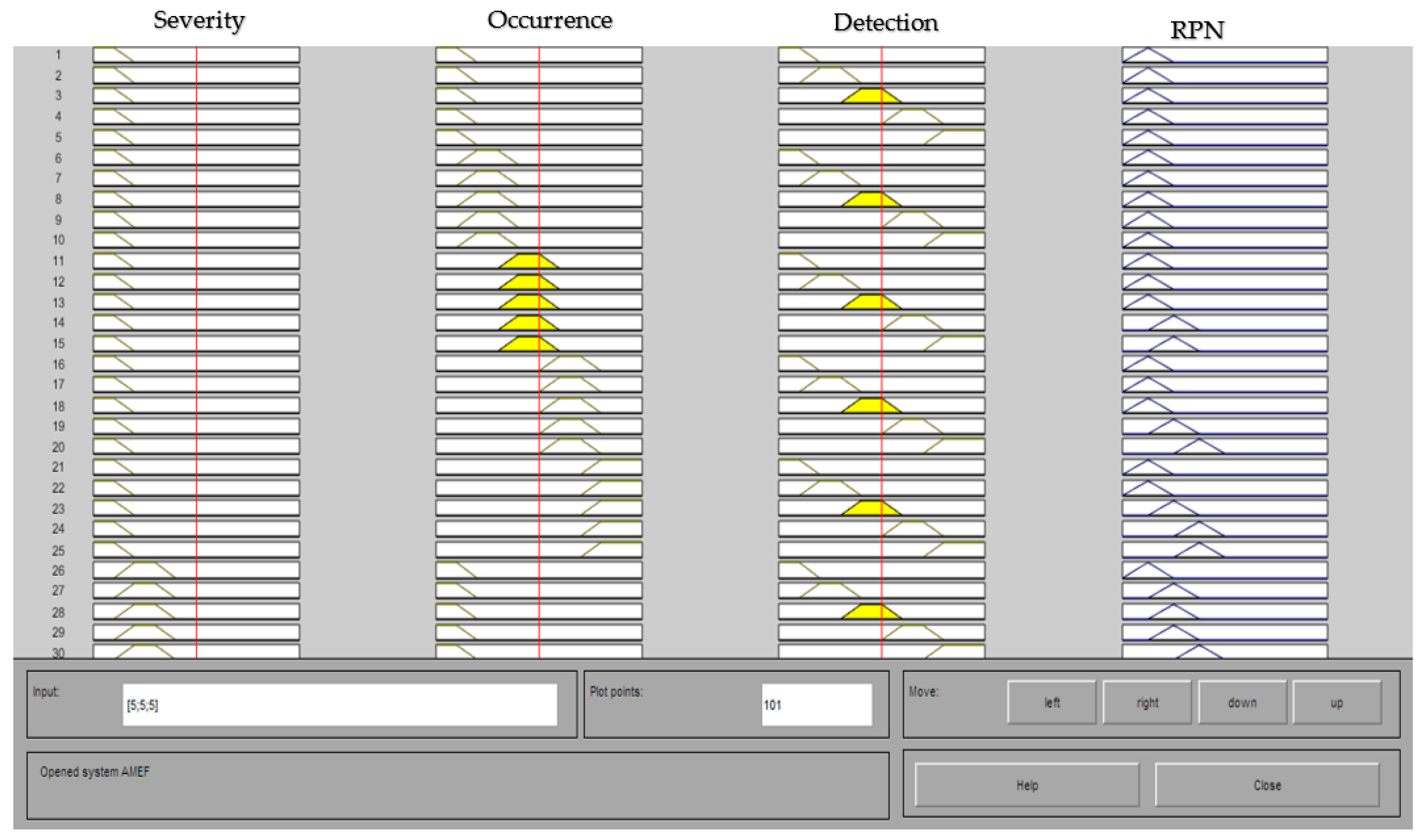
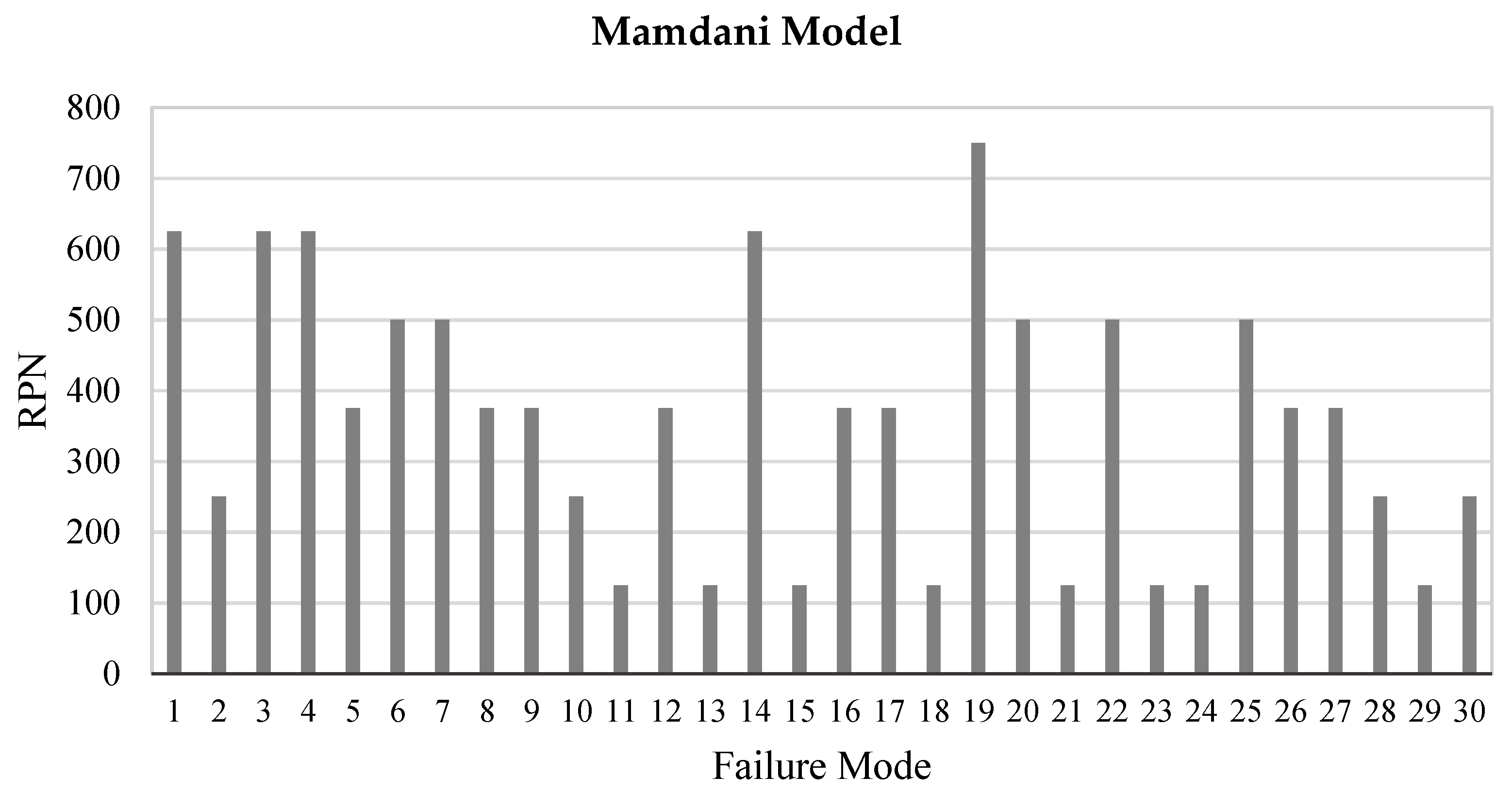
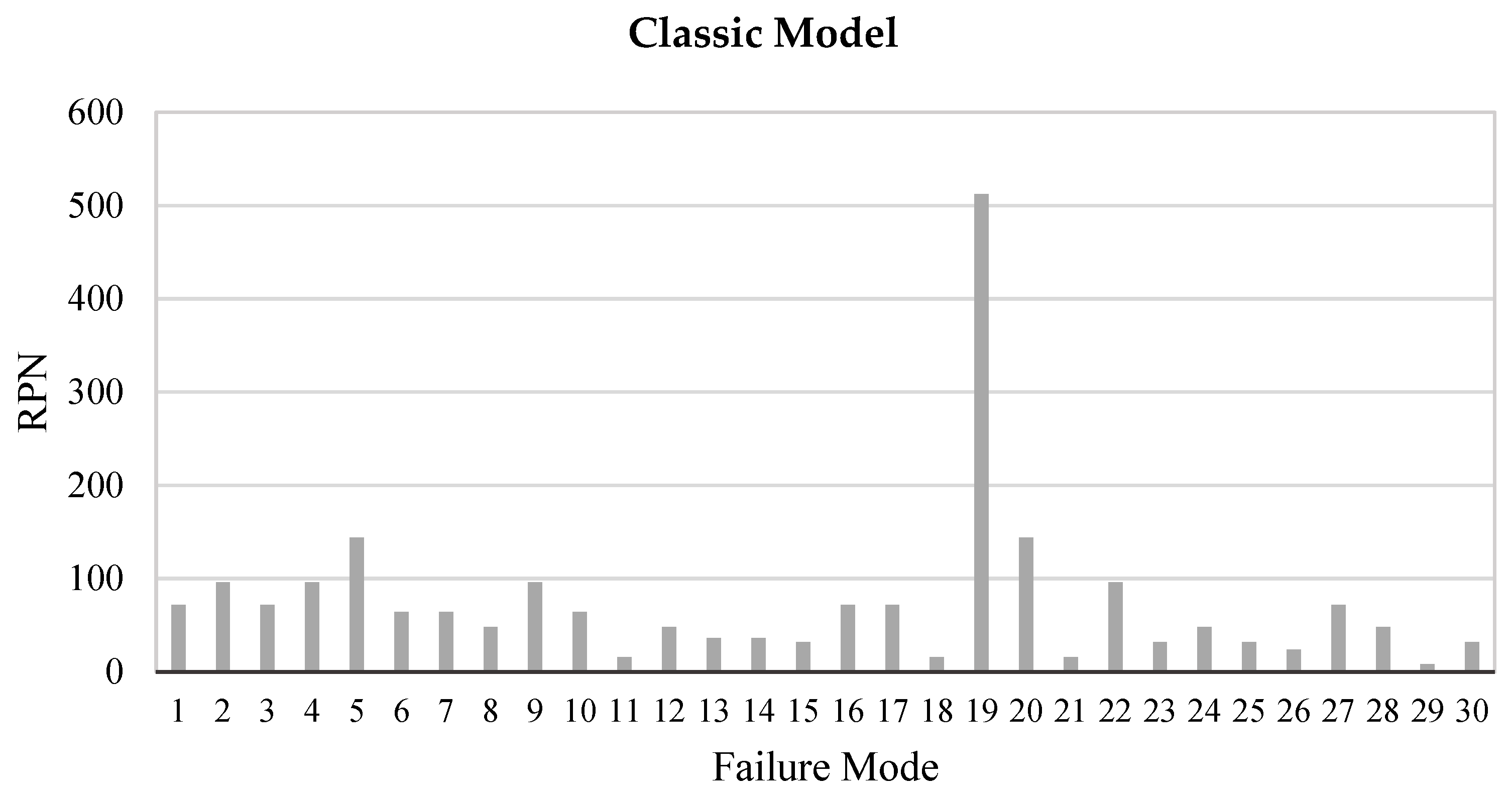
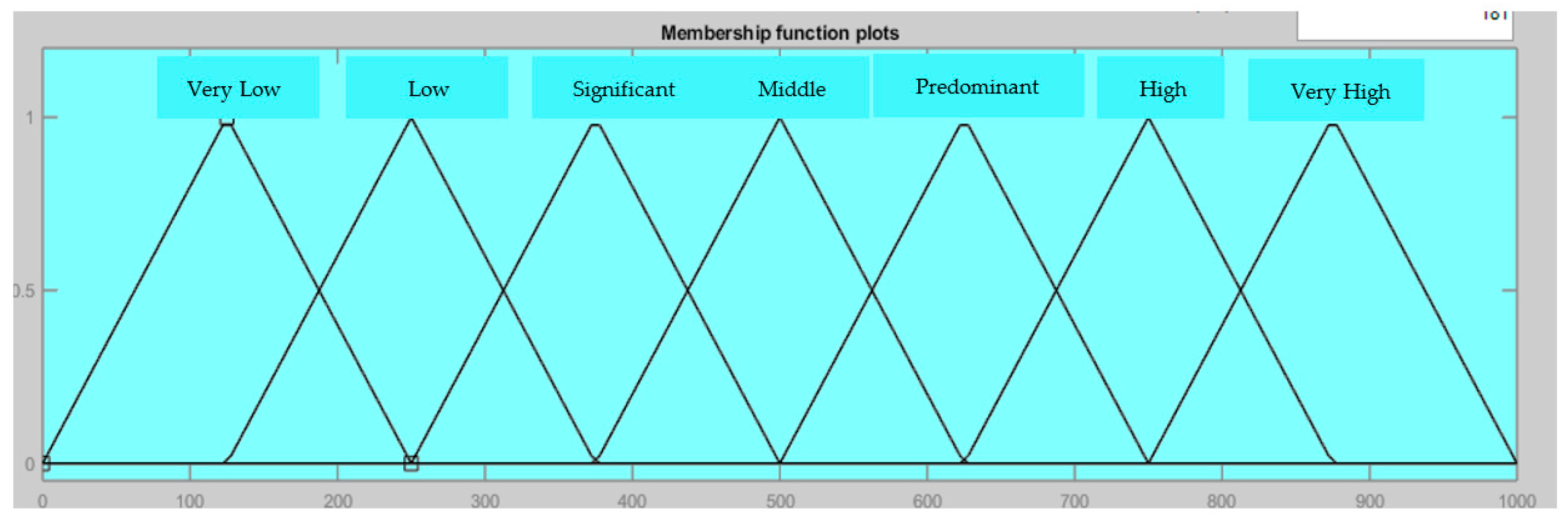
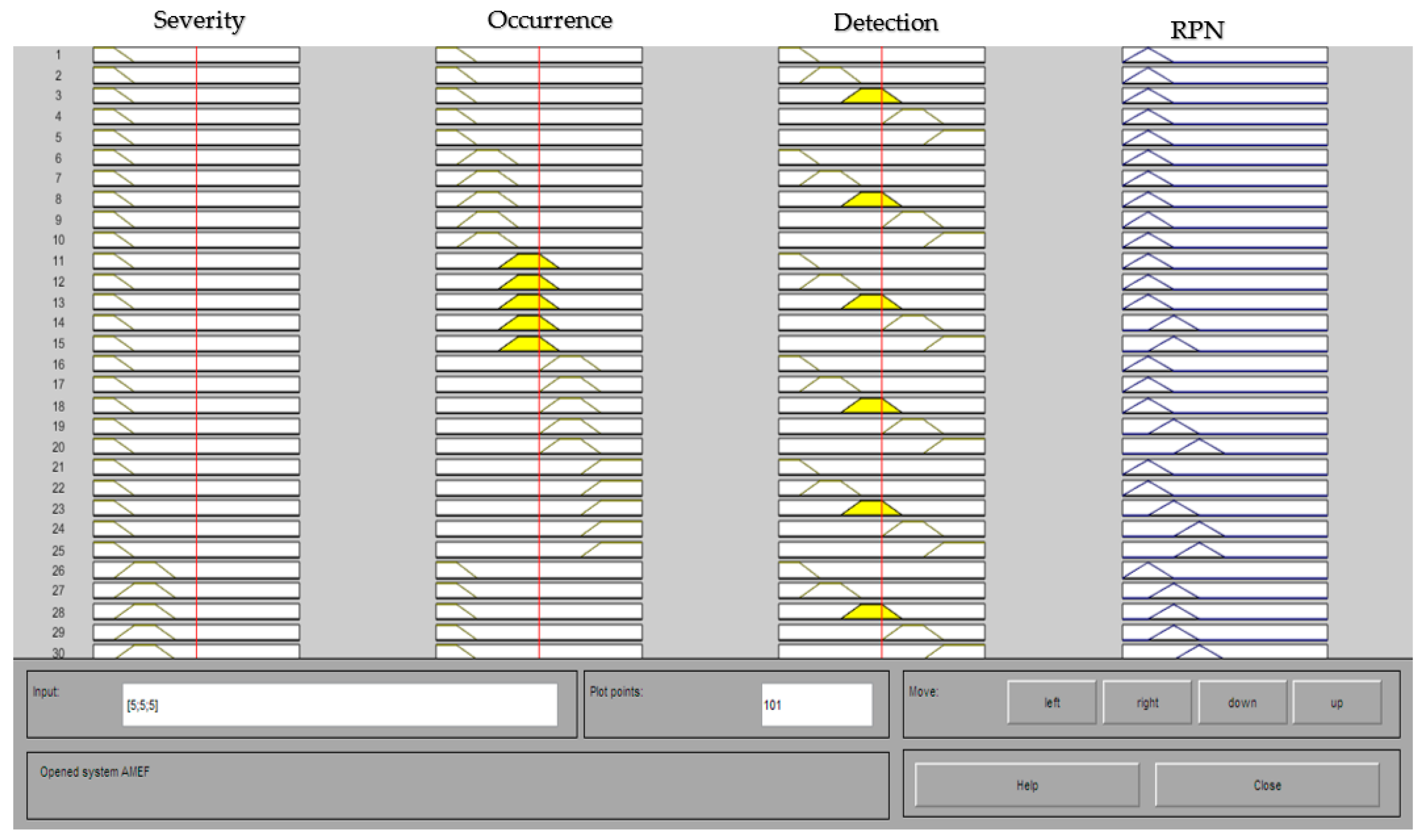
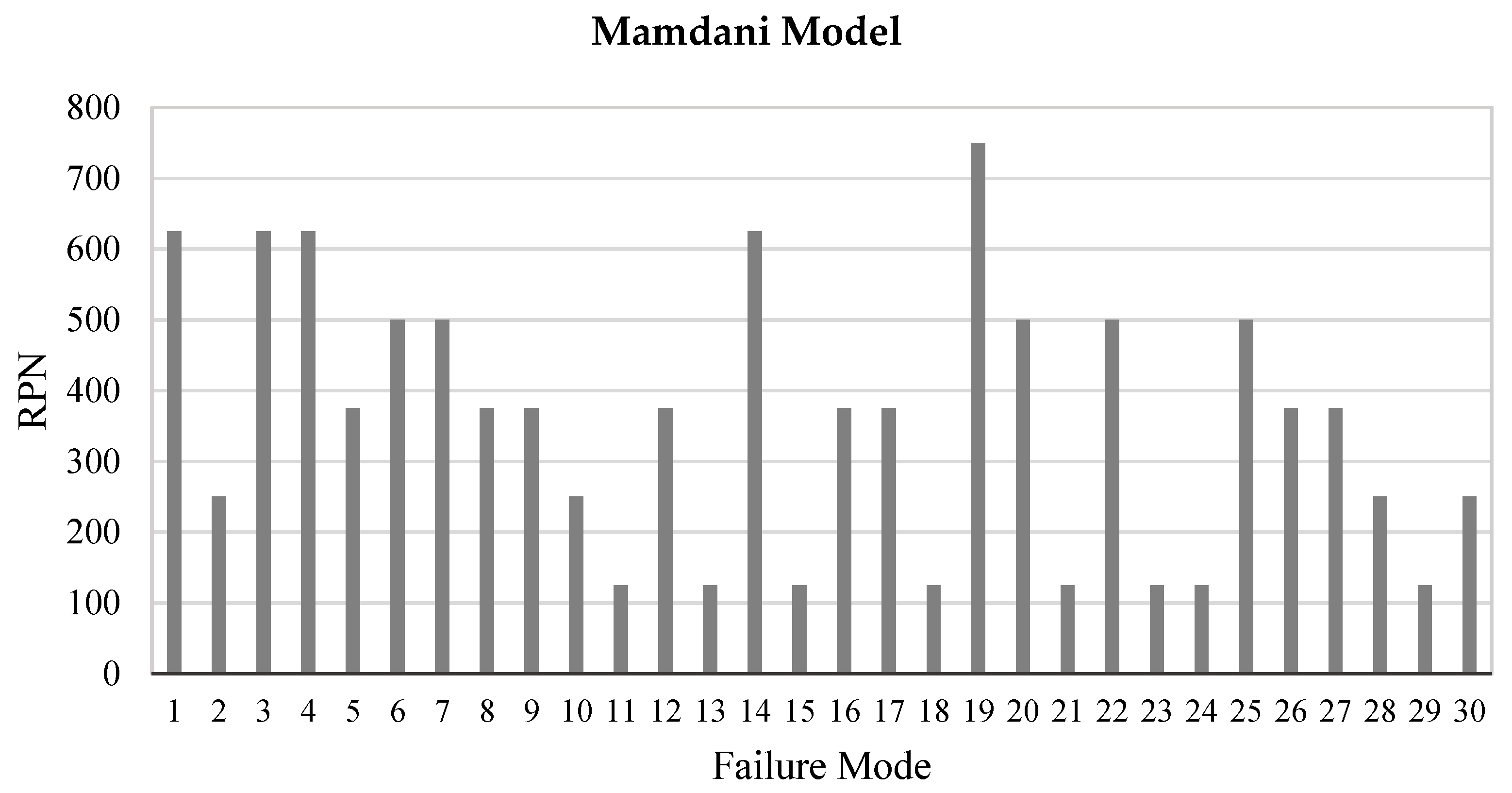
3.1. Risk Priority Number
3.2. Defuzzification Process
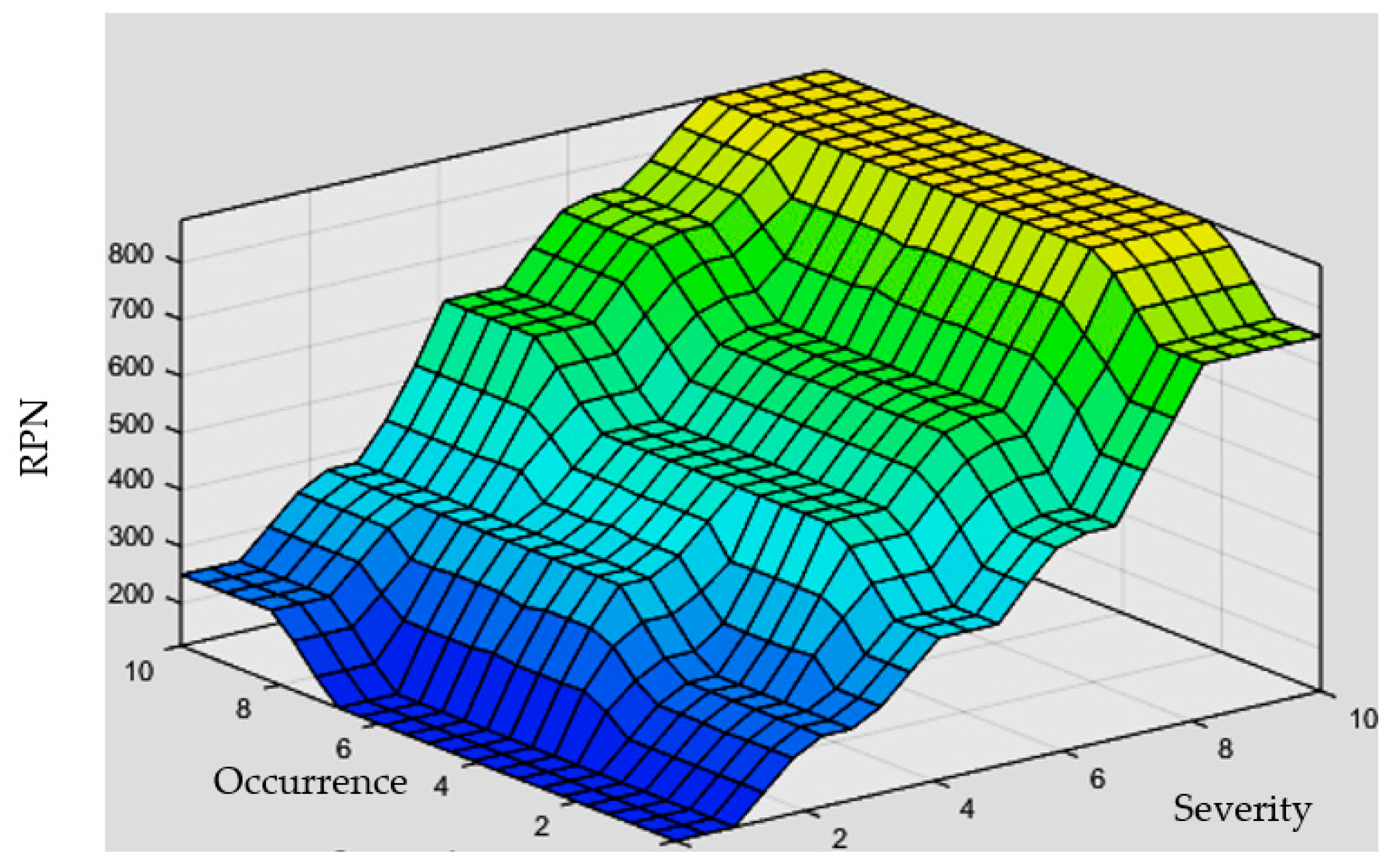
3.3. Response Surfaces
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Kabir, S.; Papadopoulos, Y. A Review of Applications of Fuzzy Sets to Safety and Reliability Engineering. Int. J. Approx. Reason. 2018, 100, 29–55. [Google Scholar] [CrossRef]
- Chanamool, N.; Naenna, T. Fuzzy FMEA Application to Improve Decision-Making Process in an Emergency Department. Appl. Soft Comput. 2016, 43, 441–453. [Google Scholar] [CrossRef]
- Batbayar, K.; Takacs, M.; Kozlovszky, M. Medical Device Software Risk Assessment Using FMEA and Fuzzy Linguistic Approach: Case Study; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2016; pp. 197–202. [Google Scholar] [CrossRef]
- Li, Z.; Chen, L. A Novel Evidential FMEA Method by Integrating Fuzzy Belief Structure and Grey Relational Projection Method. Eng. Appl. Artif. Intell. 2019, 77, 136–147. [Google Scholar] [CrossRef]
- Yazdi, M.; Daneshvar, S.; Setareh, H. An Extension to Fuzzy Developed Failure Mode and Effects Analysis (FDFMEA) Application for Aircraft Landing System. Saf. Sci. 2017, 98, 113–123. [Google Scholar] [CrossRef]
- Zhou, Y.; Xia, J.; Zhong, Y.; Pang, J. An Improved FMEA Method Based on the Linguistic Weighted Geometric Operator and Fuzzy Priority. Qual. Eng. 2016, 28, 491–498. [Google Scholar] [CrossRef]
- Grossi, G.; Goglio, P.; Vitali, A.; Williams, A. Livestock and Climate Change: Impact of Livestock on Climate and Mitigation Strategies. Anim. Front. 2019, 9, 69–76. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Silva-Martínez, K.L.; Cruz-Rivero, L.; Arrieta-González, A.; Purroy-Vasquez, R. Non-Invasive Measurer for Methane and Carbone Dioxide Emissions in Bovine Cattle through TRIZ. Agron. Res. 2020, 18, 1018–1026. [Google Scholar] [CrossRef]
- Cruz-Rivero, L.; Mateo-Diaz, N.F.; Purroy-Vasquez, R.; Angeles-Herrera, D.; Osorio-Cruz, F. Statistical Analysis for a Non-Invasive Methane Gas and Carbon Dioxide Measurer for Ruminants. In Proceedings of the 2020 IEEE International Conference on Engineering Veracruz (ICEV), Boca del Rio, Mexico, 26–29 October 2020; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Stamatis, D. Failure Mode and Effect Analysis: FMEA from Theory to Execution; American Society for Quality: Milwaukee, WI, USA, 2003. [Google Scholar]
- Jin, C.; Ran, Y.; Zhang, G. Interval-Valued Q-Rung Orthopair Fuzzy FMEA Application to Improve Risk Evaluation Process of Tool Changing Manipulator. Appl. Soft Comput. 2021, 104, 107192. [Google Scholar] [CrossRef]
- Boral, S.; Howard, I.; Chaturvedi, S.K.; McKee, K.; Naikan, V. An Integrated Approach for Fuzzy Failure Modes and Effects Analysis Using Fuzzy AHP and Fuzzy MAIRCA. Eng. Fail. Anal. 2020, 108, 104195. [Google Scholar] [CrossRef]
- Yeganeh, A.; Heravi, M.Y.; Razavian, S.B.; Behzadian, K.; Shariatmadar, H. Applying a New Systematic Fuzzy FMEA Technique for Risk Management in Light Steel Frame Systems. J. Asian Arch. Build. Eng. 2021, 20, 1–22. [Google Scholar] [CrossRef]
- Ribas, J.R.; Severo, J.C.R.; Guimarães, L.F.; Perpetuo, K.P.C. A Fuzzy FMEA Assessment of Hydroelectric Earth Dam Failure Modes: A Case Study in Central Brazil. Energy Rep. 2021, 7, 4412–4424. [Google Scholar] [CrossRef]
- Mamdani, E.H. Application of Fuzzy Logic to Approximate Reasoning Using Linguistic Synthesis. IEEE Trans. Comput. 1977, C-26, 1182–1191. [Google Scholar] [CrossRef]
- Castillo, O.; Aguilar, L.T. Fuzzy Control Synthesis for Systems with Discontinuous Friction. In Type-2 Fuzzy Logic in Control of Nonsmooth Systems: Studies in Fuzziness and Soft Computing; Springer Science and Business Media: Cham, Switzerland, 2018; Volume 373, pp. 73–83. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Receiver | Sender |
|---|---|
| Emitter-battery connection | Receiver-computer connection |
| Emitter-sensor connection | Receiver DIP |
| Issuer’s DIP | On-screen light trimmer potentiometer |
| Battery | XBee Coordinator Module |
| Straps | |
| Support structure | |
| Sensors | |
| Sensor holder | |
| XBee Router Module |
| Main Component | Subcomponent | No | Failure Mode | Causes of Failure | Failure Effects |
|---|---|---|---|---|---|
| Emitter | Battery-emitter line | 1 | Unplugging connectors | Line exposed to the outside of the emitter stuck with objects in the environment. | Emitter and sensors out of operation due to lack of electrical power supply, interruption of measurements. |
| 2 | False in connectors | Non-fixed plug-type connectors, contact of the line with the animal’s body or objects in the environment. | Electric current and intermittent emitter operation, uncalibrated sensor, discontinuous and incorrect data sending. | ||
| 3 | Short circuit | Connectors discovered outdoors, the humidity of the environment, or animal fluids. | Partial or total damage to internal components of the emitter and/or battery. | ||
| Emitter | Emitter-sensor line | 4 | Unplugging connectors | Line exposed to the outside of the emitter, inadequate line length, line stuck with objects in the environment. | Sensors out of operation due to lack of electrical power supply. |
| 5 | False in connectors | Non-fixed plug-type connectors, contact of the line with the animal’s body or objects in the environment. | Electric current and intermittent sensor operation, sensor uncalibrated, incorrect and discontinuous measurements. | ||
| 6 | Short circuit | Connectors discovered outdoors, ambient humidity, or animal fluids. | Partial or total damage to the sensors and/or internal controllers of the emitter. | ||
| Emitter | Emitter DIP | 7 | Inactive electric current function | Switch exposed to the elements, deactivated by contact with the animal’s body or objects in the environment. | The passage of electric current from the emitter to each of the sensors is not allowed; the sensors will not make measurements. |
| 8 | Inactive ground current function | Switch exposed to the elements, deactivated by contact with the animal’s body or objects in the environment. | Emitter components and sensors are vulnerable to damage from electrical surges. | ||
| 9 | Inactive TX radio frequency function | Switch exposed to the elements, deactivated by contact with the animal’s body or objects in the environment. | The sensors perform measurements, but the XBee Coordinator module does not transmit the data to the receiver for data recording. | ||
| Emitter | 10 | Inactive TX radio frequency function | Switch exposed to the elements, deactivated by contact with the animal’s body or objects in the environment. | The signal of the measurements is transmitted from the XBee Coordinator module, but communication with the XBee Router module of the receiver is not achieved. | |
| 11 | Fractured switches | Exposed switch location, sudden movements of the animal, or improper handling of the operator. | Difficulty manipulating the functions of the switches in the emitter. | ||
| 12 | Short circuit | Connectors discovered outdoors, ambient humidity, or animal fluids. | Instability of functions, damage of emitter components. | ||
| Emitter | Battery | 13 | Thermal leakage | The inadequate protective case against high or low temperatures. | Poor battery performance, interruption of measurements, incomplete measurement periods. |
| 14 | Short circuit | Lack of tightness, broken protective sheath, moisture filtration from the environment, or animal fluids. | Damage to emitter box components and/or sensors. | ||
| Emitter | Straps | 15 | Loose safety clasps | Animal struggle, poor operator fit, or poorly resistant plastic material. | Instability of the structure at the animal head or loose structure of the animal head. |
| 16 | Breaking of security bands | Friction wear, moisture deterioration, sudden movement of the animal, or low resistance of the material. | Instability of the structure at the head of the animal or loose structure of the head of the animal. | ||
| Emitter | Support structure | 17 | Folded metal arms | Flexible material, animal struggle, or operator mismanagement. | Improper position of the sensor to the animal’s tube, low sensor measurement range, unreliable gas estimates with a high level of variation. |
| 18 | Desoldered arm joints | Poor welding work, poorly resistant welding, or overexertion of the structure. | Instability of the structure at the head of the animal or loose structure of the head of the animal. | ||
| Emitter | Sensors | 19 | Low measurement sensitivity | Obstruction of the sensor by food debris or mucus from the animal, poor posture, and strong wind currents. | Unreliable gas estimates with a high level of variation. |
| 20 | Short circuit | The printed circuit of the discovered sensor, ambient humidity, animal mucus, or food debris. | Instability of electric current in sensors, discontinuous measurement lapses, the partial or total damage to the sensor. | ||
| 21 | Led measurement indicator without operating. | Led desoldering of the printed circuit, damaged by moisture or melted by shocks. | Difficulty identifying sensor malfunction in real-time. | ||
| Emitter | Sensor holder | 22 | Bent structure | Slightly rigid structural material, sudden movements of the animal’s tube, and/or the wrong fit in the animal’s tube. | Improper position of the sensor to the animal’s tube, low sensor measurement range, unreliable gas estimates with a high level of variation. |
| 23 | Loose Assembly Snaps | Sudden movements of the animal’s trunk and obstruction with objects in the environment. | Instability of sensors to the animal’s trunk. | ||
| Receiver | XBee Modules (Router and Coordinator) | 24 | Communication signal loss | Unfavorable topographical conditions, interference from other signals, or low range capability of the modules. | Gas measurement data loss during signal interruption between XBee modules. |
| Receiver | Receiver DIP | 25 | Inactive electric current function | Operator mishandling or fractured switch. | The passage of electric current from the computer is not allowed, difficulty manipulating the functions of the switches. |
| 26 | Inactive grounding function | Operator mishandling or fractured switch. | In case of short circuit damage of the receiver components, difficulty manipulating the functions of the switches. | ||
| 27 | Inactive TX radio frequency function | Operator mishandling or fractured switch. | The receiver does not send back the communication signal to the transmitter, having difficulty manipulating the switches’ functions. | ||
| 28 | Inactive TX radio frequency function | Operator mishandling or fractured switch. | The receiver does not receive the signal from the transmitter, difficulty manipulating the functions of the switches on the receiver. | ||
| Receiver | Trimmer LCD Screen Potentiometer | 29 | Incorrect light regulation | The sweeping regulator, presence of moisture or internal dirt. | Difficulty manipulating the lighting intensity on the receiver screen. |
| Receiver | Receiver-computer connection | 30 | Incorrect light regulation | Error in software drivers, operator mishandling. | Interruption in the transfer of information, loss of data in the logger software. |
| Linguistic Value | Severity | Linguistic Value | Occurrence | Linguistic Value | Detection |
|---|---|---|---|---|---|
| Very Low | It does not represent significant affectation; the operation of the prototype will be almost normal. | Remote | Just once for each measurement period. | Very High | In most tests are identified, detailed inspections are not necessary. |
| Low | It represents minimal affectation; the prototype will work with slight affectations. | Low | Approximately up to three times for each measurement period. | High | They are almost always detected in tests; no detailed inspections are necessary. |
| Medium | The affectations are significant; the device will work, the information generated will be unreliable. | Regular | Approximately up to five times per measurement period. | Medium | Sometimes they are detected during testing; basic inspection is necessary. |
| High | The affectations are severe; sometimes, it will not work, the information generated will not be reliable. | High | Approximately up to seven times for each measurement period. | Low | Hardly detected during testing, a detailed inspection is necessary. |
| Very High | The affectations will not allow the operation of the prototype. | Very High | More than seven for each measurement period. | Very Low | They are seldom detected during testing; inspection with special methods is necessary. |
| Fuzzy Sets | Fuzzy Range | Geometric Figures Values |
|---|---|---|
| Very Low | 0–2 | [0, 0, 1, 2] |
| Low | 1–4 | [1, 2, 3, 4] |
| Medium | 3–6 | [3, 4, 5, 6] |
| High | 5–8 | [5, 6, 7, 8] |
| Very High | 7–10 | [7, 8, 10, 10] |
| Fuzzy Sets | Fuzzy Range | Geometric Figures Values |
|---|---|---|
| Remote | 0–2 | [0, 0, 1, 2] |
| Low | 1–4 | [1, 2, 3, 4] |
| Regular | 3–6 | [3, 4, 5, 6] |
| High | 5–8 | [5, 6, 7, 8] |
| Very High | 7–10 | [7, 8, 10, 10] |
| Fuzzy Sets | Fuzzy Range | Geometric Figures Values |
|---|---|---|
| Very High | 0–2 | [0, 0, 1, 2] |
| High | 1–4 | [1, 2, 3, 4] |
| Medium | 3–6 | [3, 4, 5, 6] |
| Low | 5–8 | [5, 6, 7, 8] |
| Remote | 7–10 | [7, 8, 10, 10] |
| Fuzzy Sets | Fuzzy Range | Geometric Figures Values |
|---|---|---|
| Very Low | 0–250 | [0, 125, 250] |
| Low | 125–375 | [125, 250, 375] |
| Significant | 250–500 | [250, 375, 500] |
| Middle Predominant | 375–625 500–750 | [375, 500, 625] [500, 625, 750] |
| High Very high | 625–875 750–1000 | [625, 750, 875] [750, 875, 1000] |
| Failure Mode | RPN Fuzzy Model |
|---|---|
| 1 | 625 |
| 2 | 250 |
| 3 | 625 |
| 4 | 625 |
| 5 | 375 |
| 6 | 500 |
| 7 | 500 |
| 8 | 375 |
| 9 | 375 |
| 10 | 250 |
| 11 | 125 |
| 12 | 375 |
| 13 | 125 |
| 14 | 625 |
| 15 | 125 |
| 16 | 375 |
| 17 | 375 |
| 18 | 125 |
| 19 | 750 |
| 20 | 500 |
| 21 | 125 |
| 22 | 500 |
| 23 | 125 |
| 24 | 125 |
| 25 | 500 |
| 26 | 375 |
| 27 | 375 |
| 28 | 250 |
| 29 | 125 |
| 30 | 250 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cruz-Rivero, L.; Méndez-Hernández, M.L.; Mar-Orozco, C.E.; Aguilar-Lasserre, A.A.; Barbosa-Moreno, A.; Sánchez-Escobar, J. Functional Evaluation Using Fuzzy FMEA for a Non-Invasive Measurer for Methane and Carbone Dioxide. Symmetry 2022, 14, 421. https://doi.org/10.3390/sym14020421
Cruz-Rivero L, Méndez-Hernández ML, Mar-Orozco CE, Aguilar-Lasserre AA, Barbosa-Moreno A, Sánchez-Escobar J. Functional Evaluation Using Fuzzy FMEA for a Non-Invasive Measurer for Methane and Carbone Dioxide. Symmetry. 2022; 14(2):421. https://doi.org/10.3390/sym14020421
Chicago/Turabian StyleCruz-Rivero, Lidilia, María Leonor Méndez-Hernández, Carlos Eusebio Mar-Orozco, Alberto A. Aguilar-Lasserre, Alfonso Barbosa-Moreno, and Josué Sánchez-Escobar. 2022. "Functional Evaluation Using Fuzzy FMEA for a Non-Invasive Measurer for Methane and Carbone Dioxide" Symmetry 14, no. 2: 421. https://doi.org/10.3390/sym14020421
APA StyleCruz-Rivero, L., Méndez-Hernández, M. L., Mar-Orozco, C. E., Aguilar-Lasserre, A. A., Barbosa-Moreno, A., & Sánchez-Escobar, J. (2022). Functional Evaluation Using Fuzzy FMEA for a Non-Invasive Measurer for Methane and Carbone Dioxide. Symmetry, 14(2), 421. https://doi.org/10.3390/sym14020421