
Establishment of an Eleven-Freedom-Degree Coupling Dynamic Model of Heavy Vehicle-Pavement

Abstract
:1. Introduction
2. Vehicle Dynamic Model and Equilibrium Equation
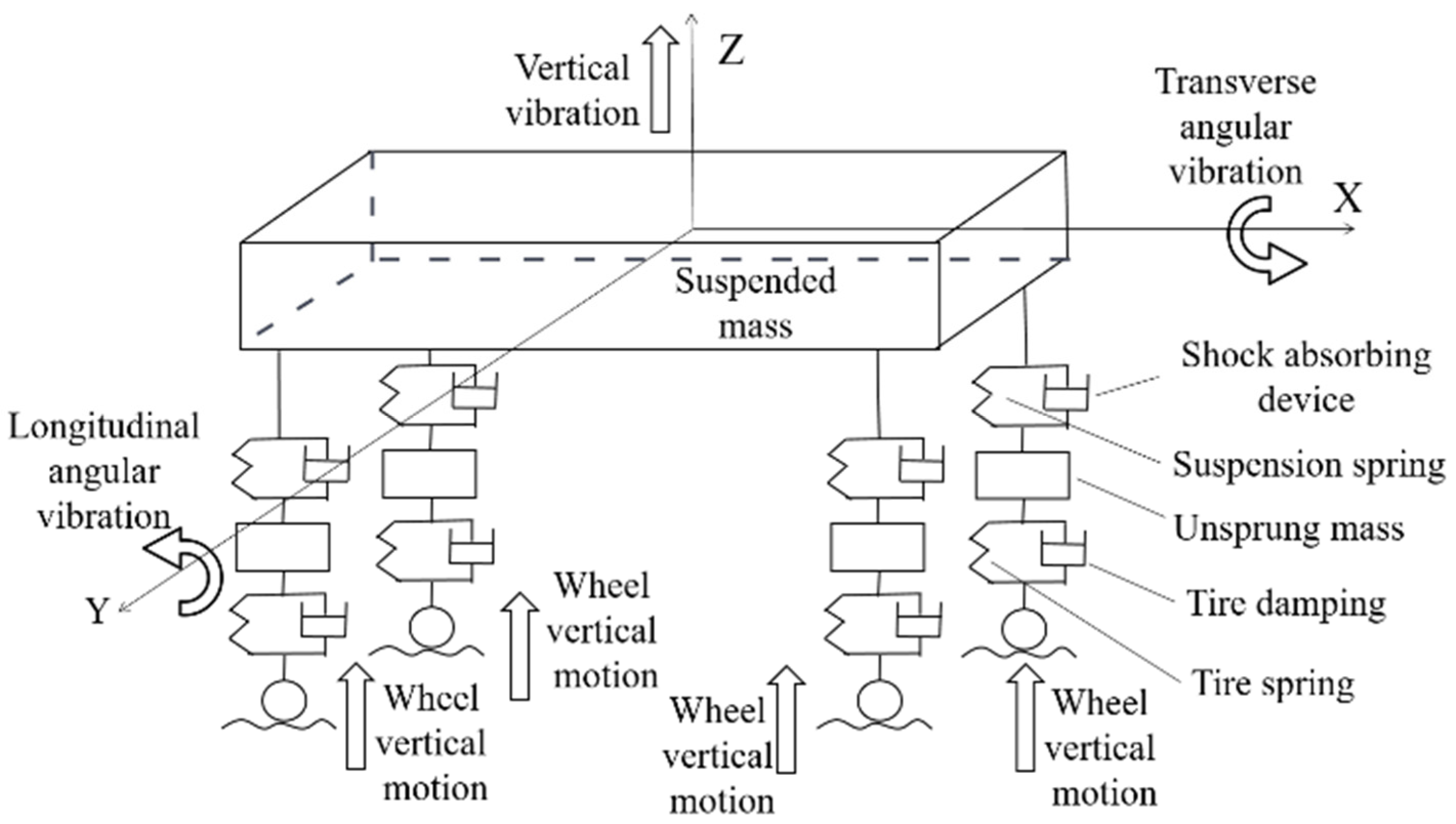
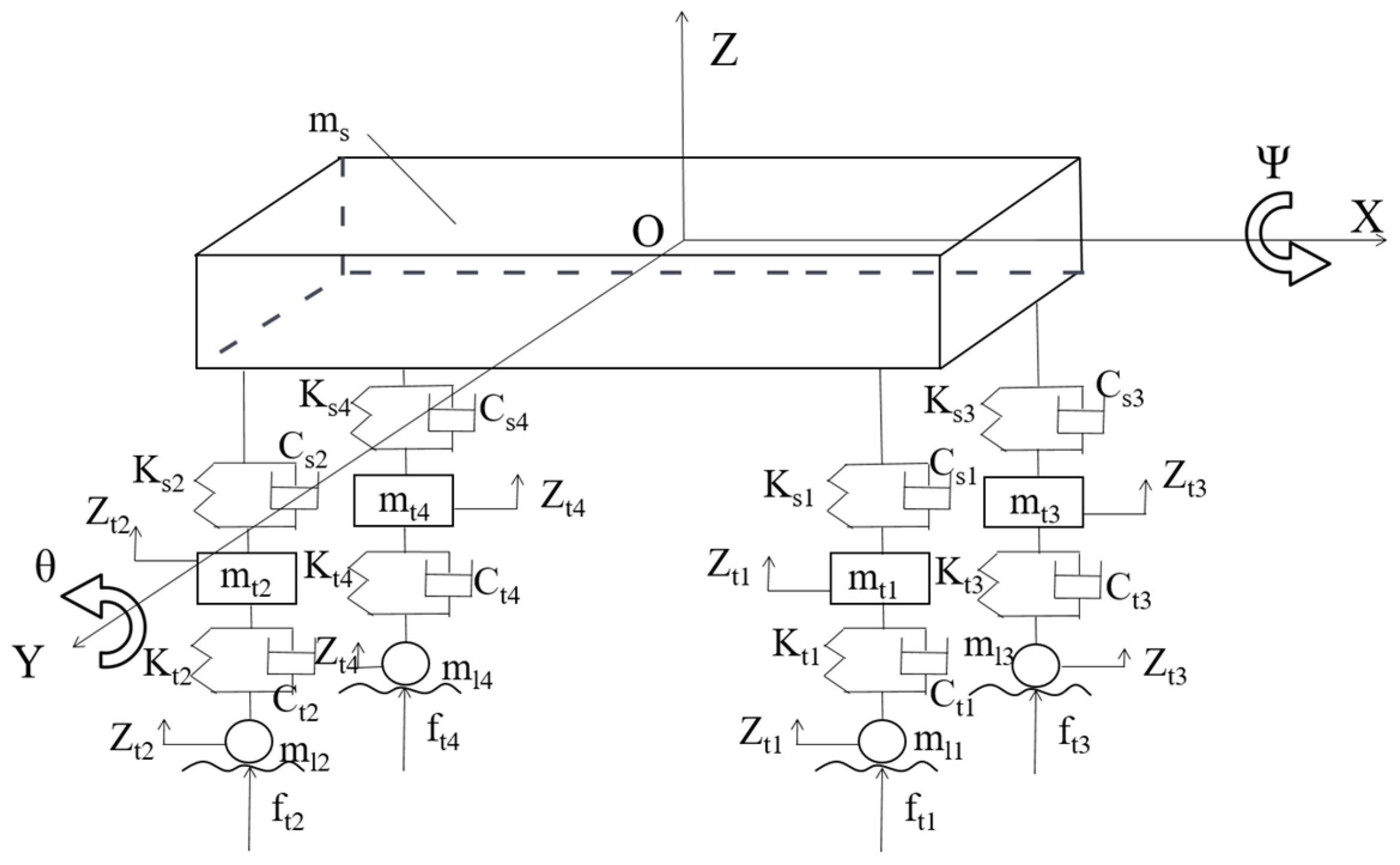
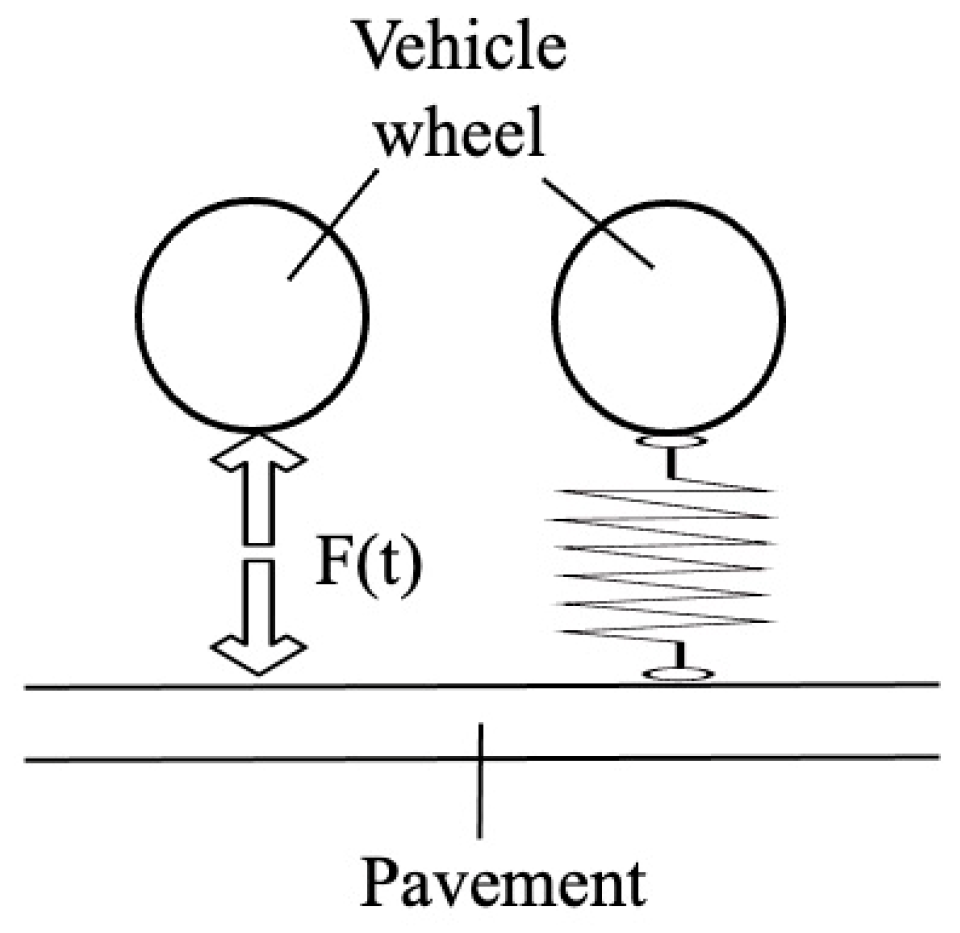
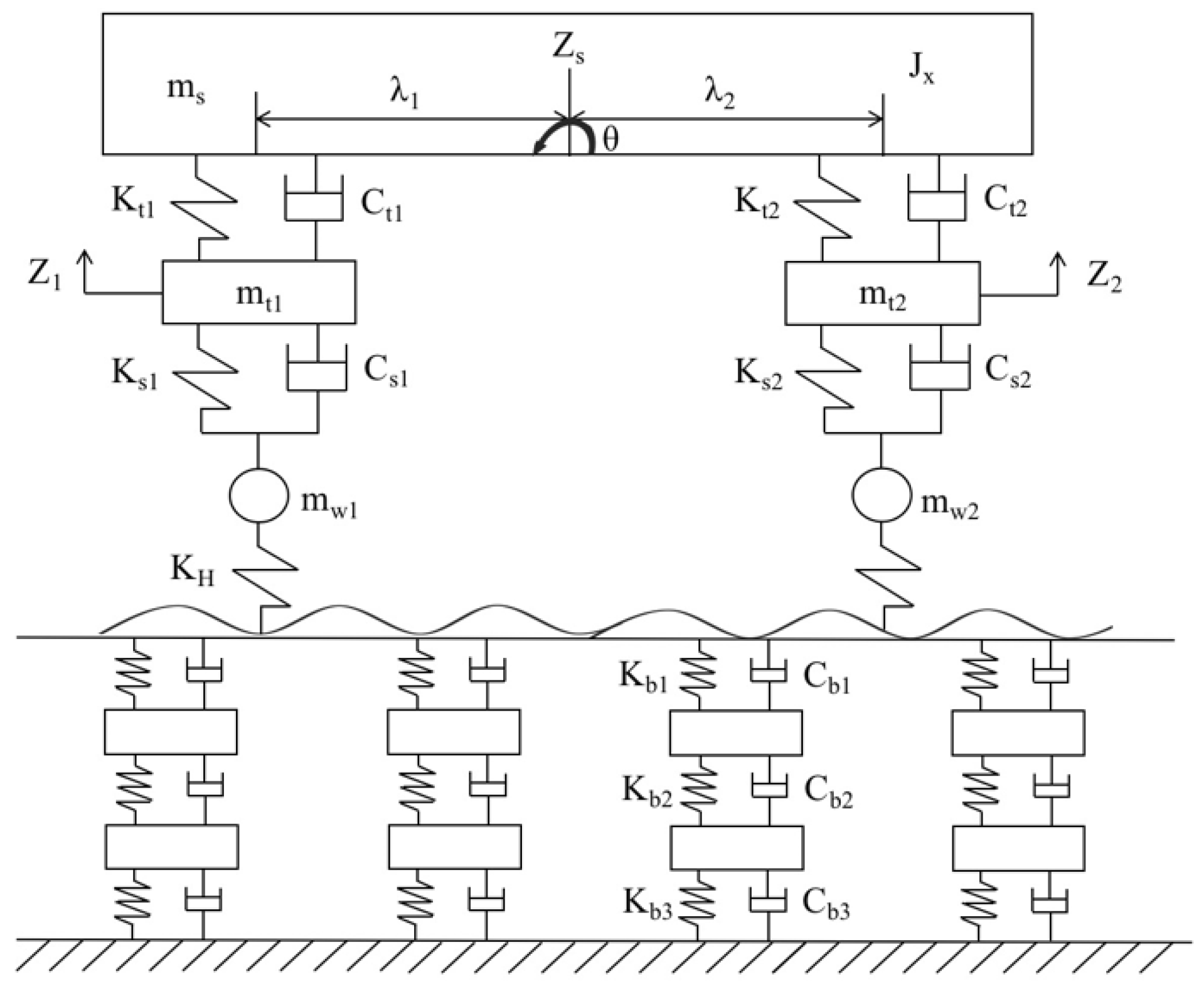
2.1. Simplified Vehicle Road Dynamic Model
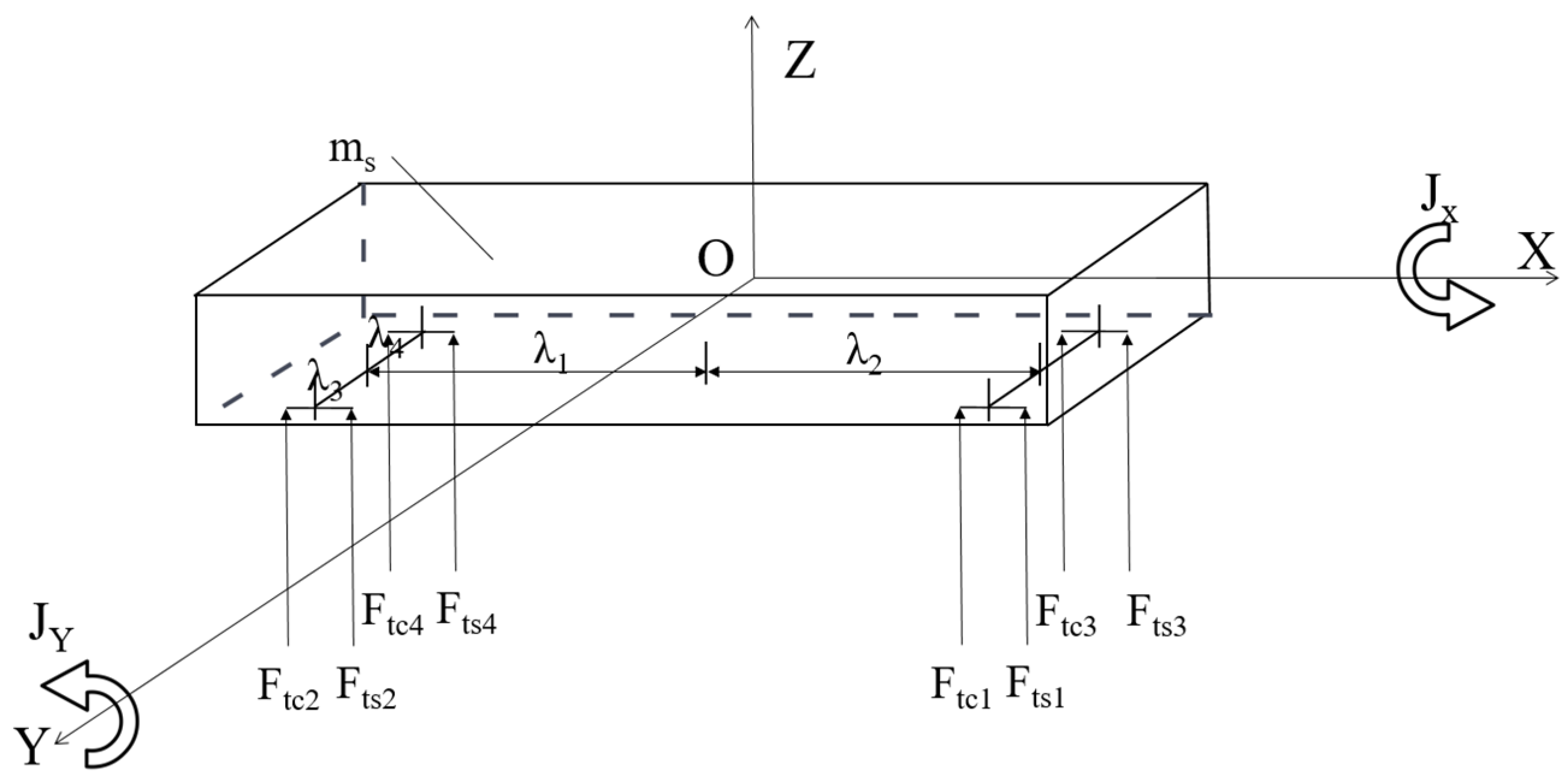
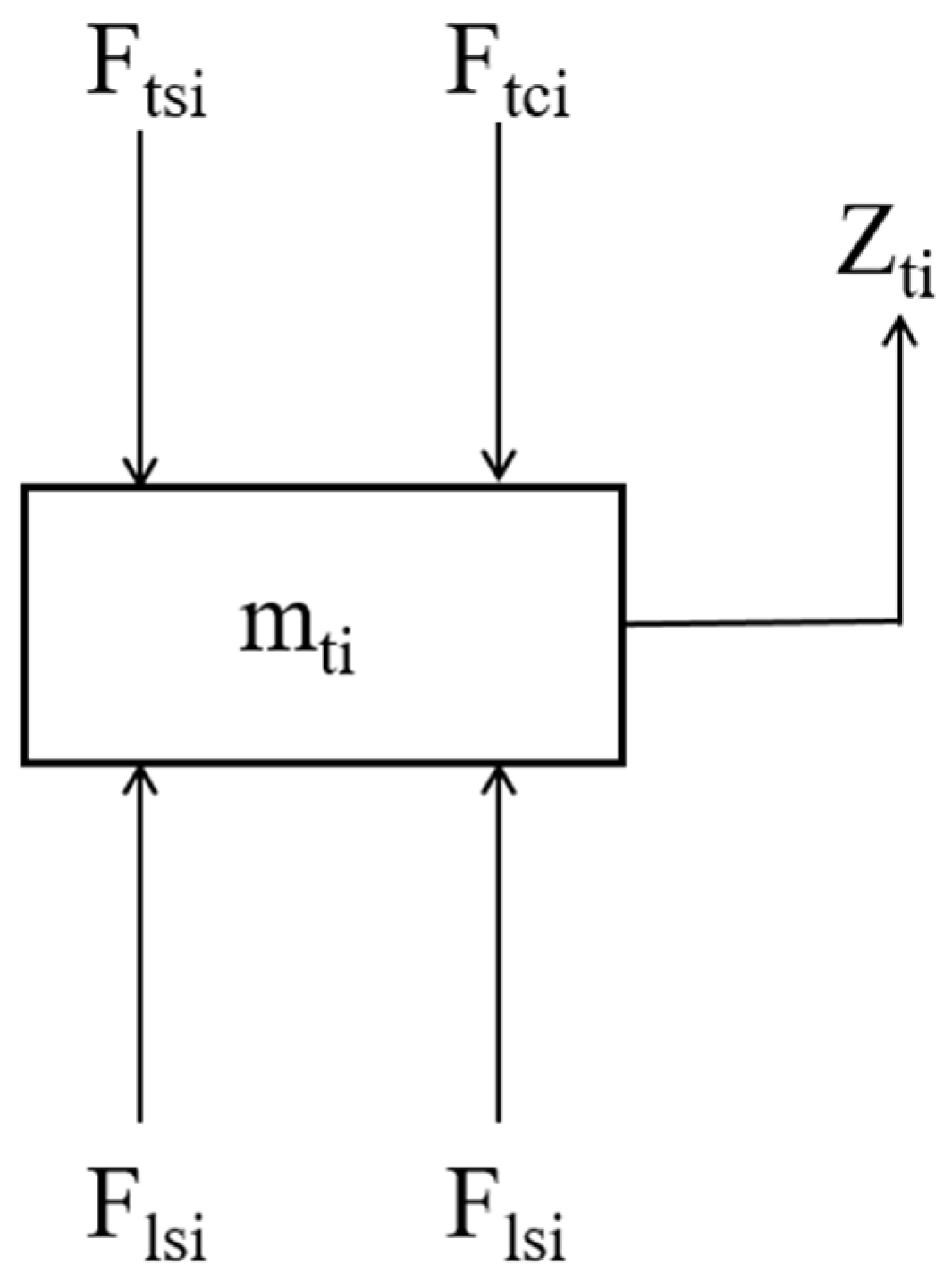
2.2. Dynamic Balance of Vehicle–Road System
3. Establishment of Coupled Dynamic Equation between Heavy-Duty Vehicle and Road
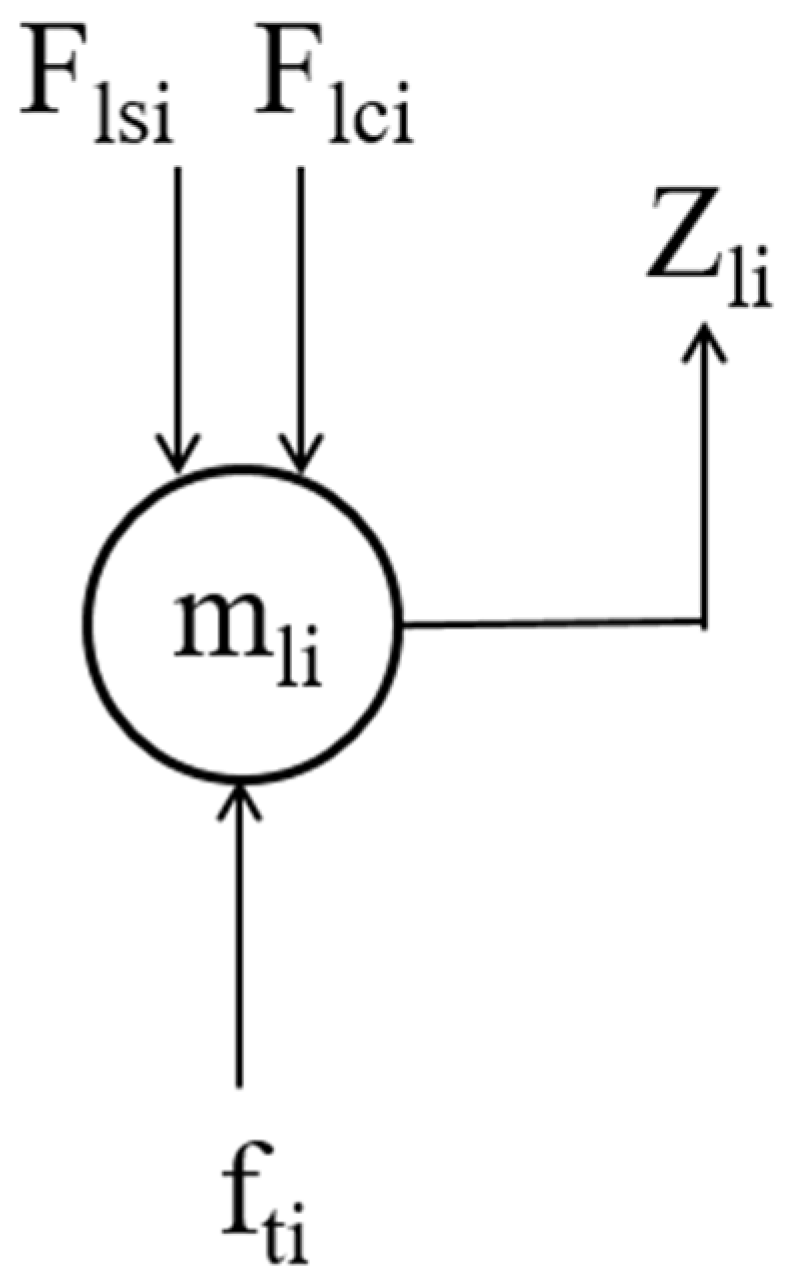
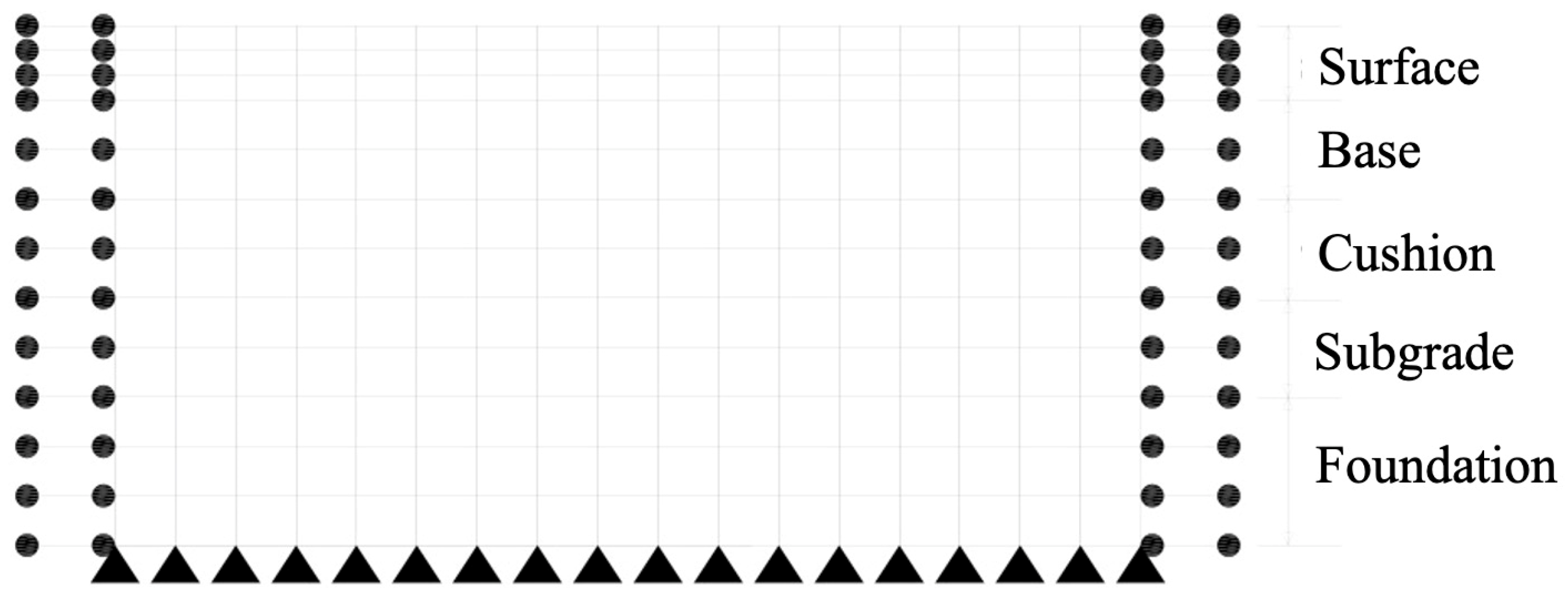
3.1. Pavement Vibration Model
3.2. Model of Road Roughness
3.3. Wheel–Road Displacement Coupled Vibration
3.4. Establishment of Vehicle–Road Coupling Dynamic Analysis Model
4. Theoretical Analysis of Vehicle–Road System
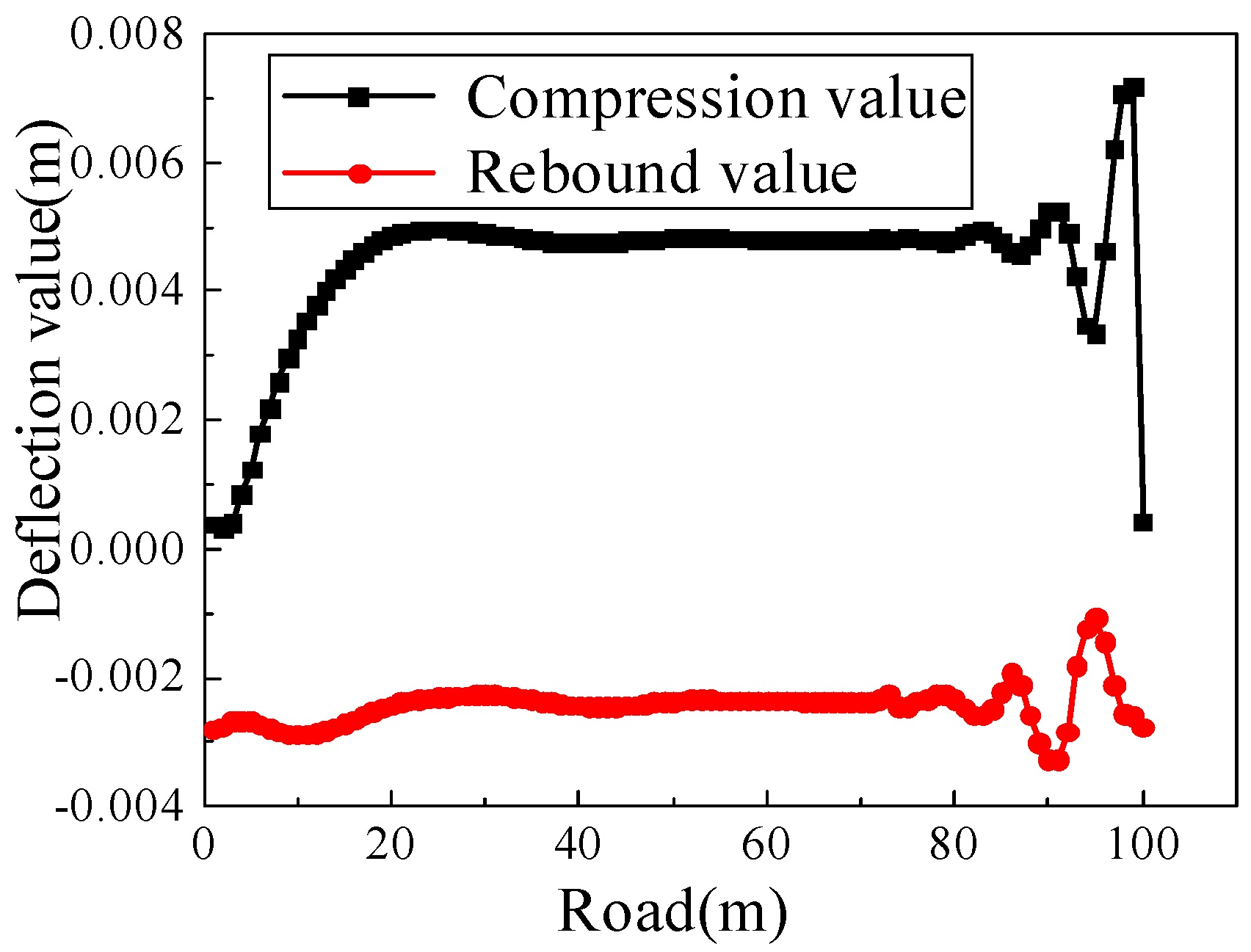
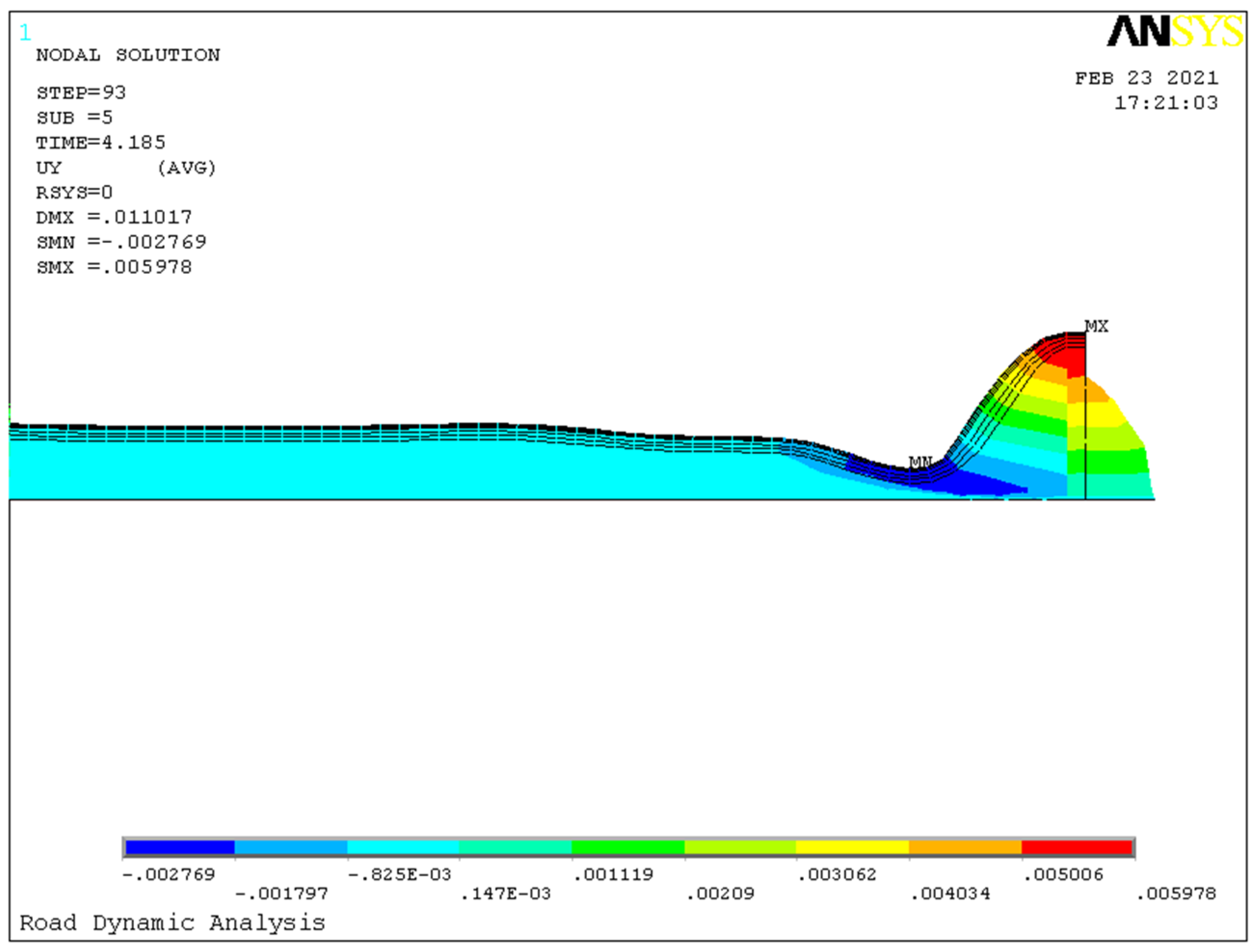
4.1. Maximum Deflection of Pavement
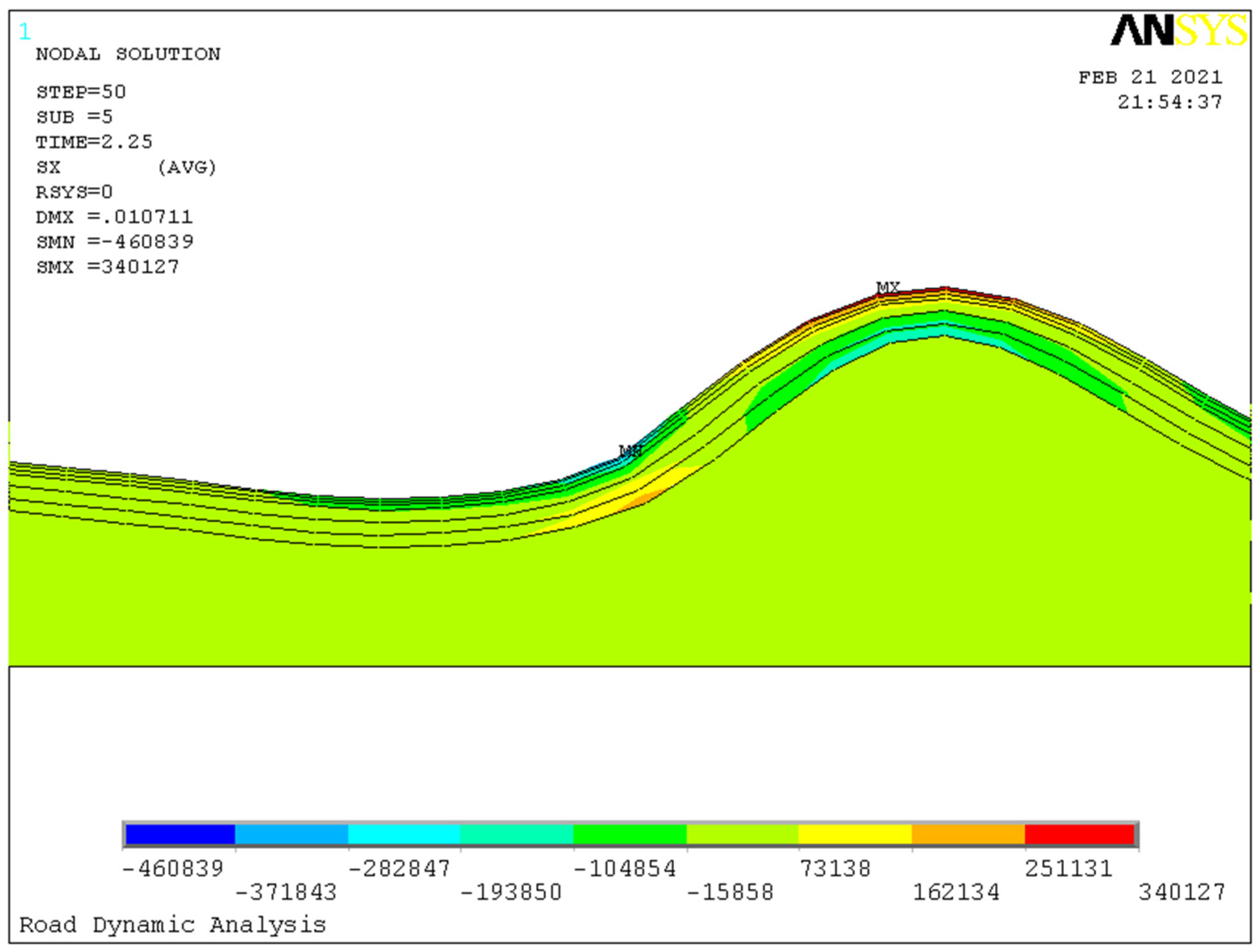
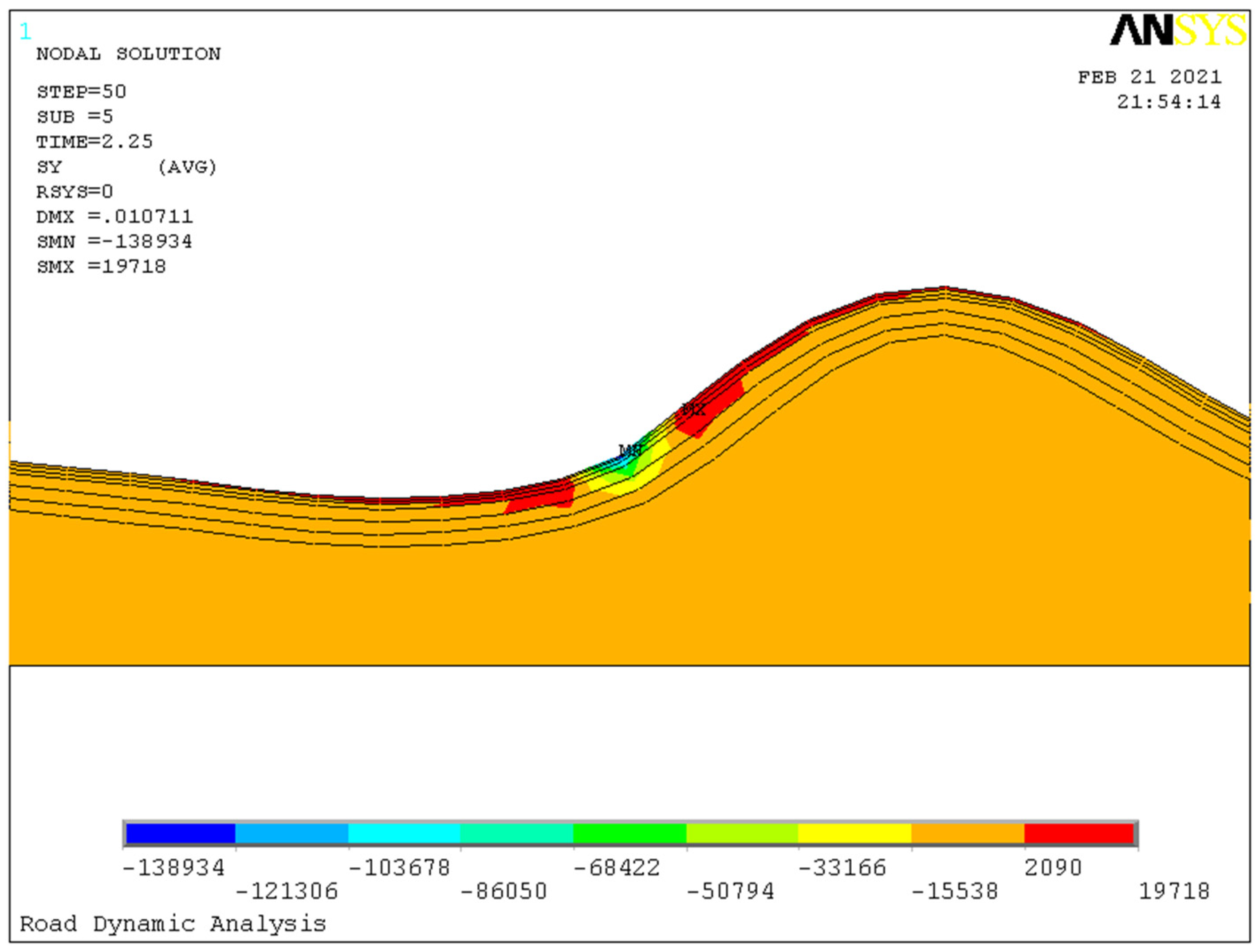
4.2. Stress State Analysis of Pavement
4.2.1. Tensile Stress Analysis
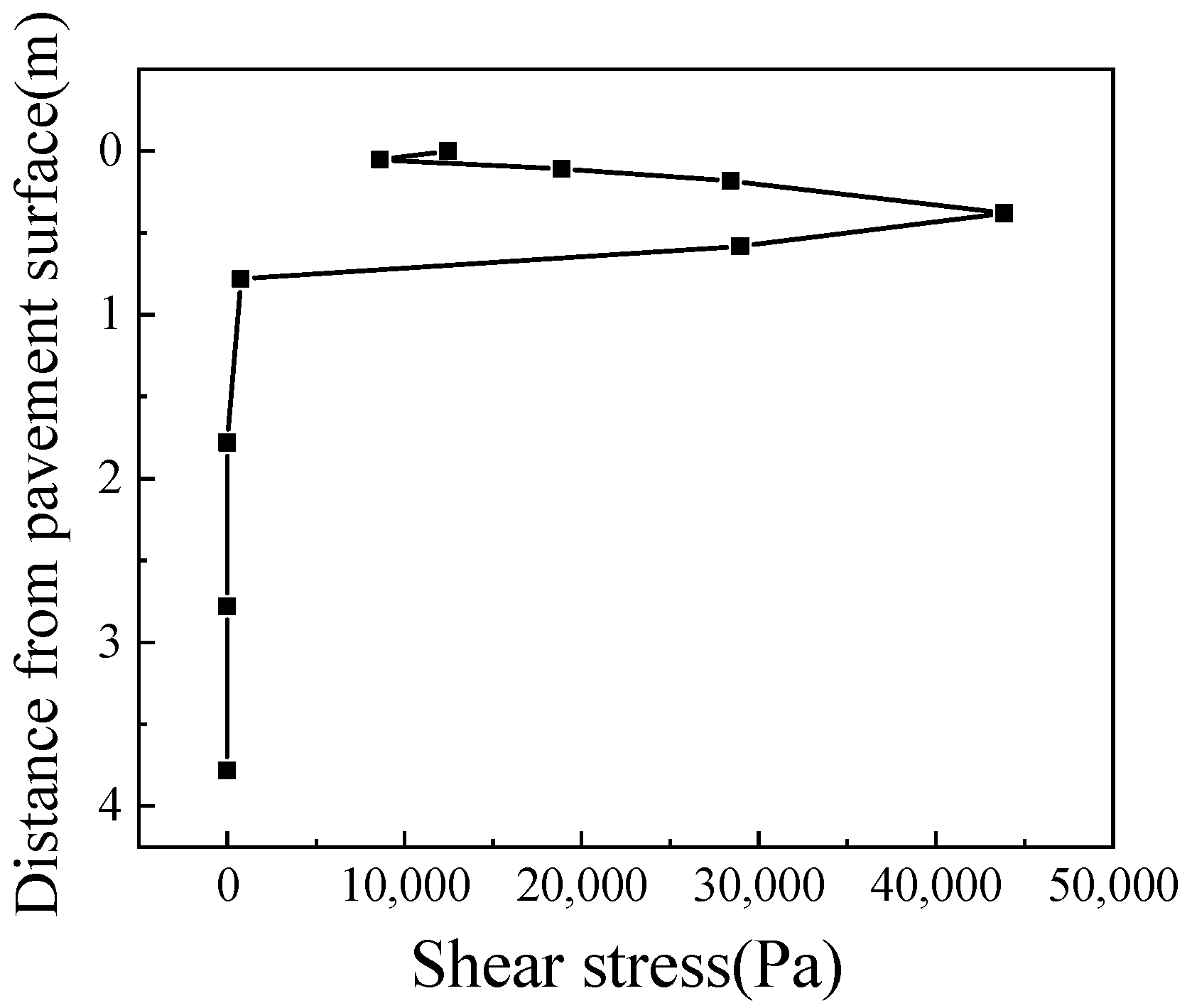
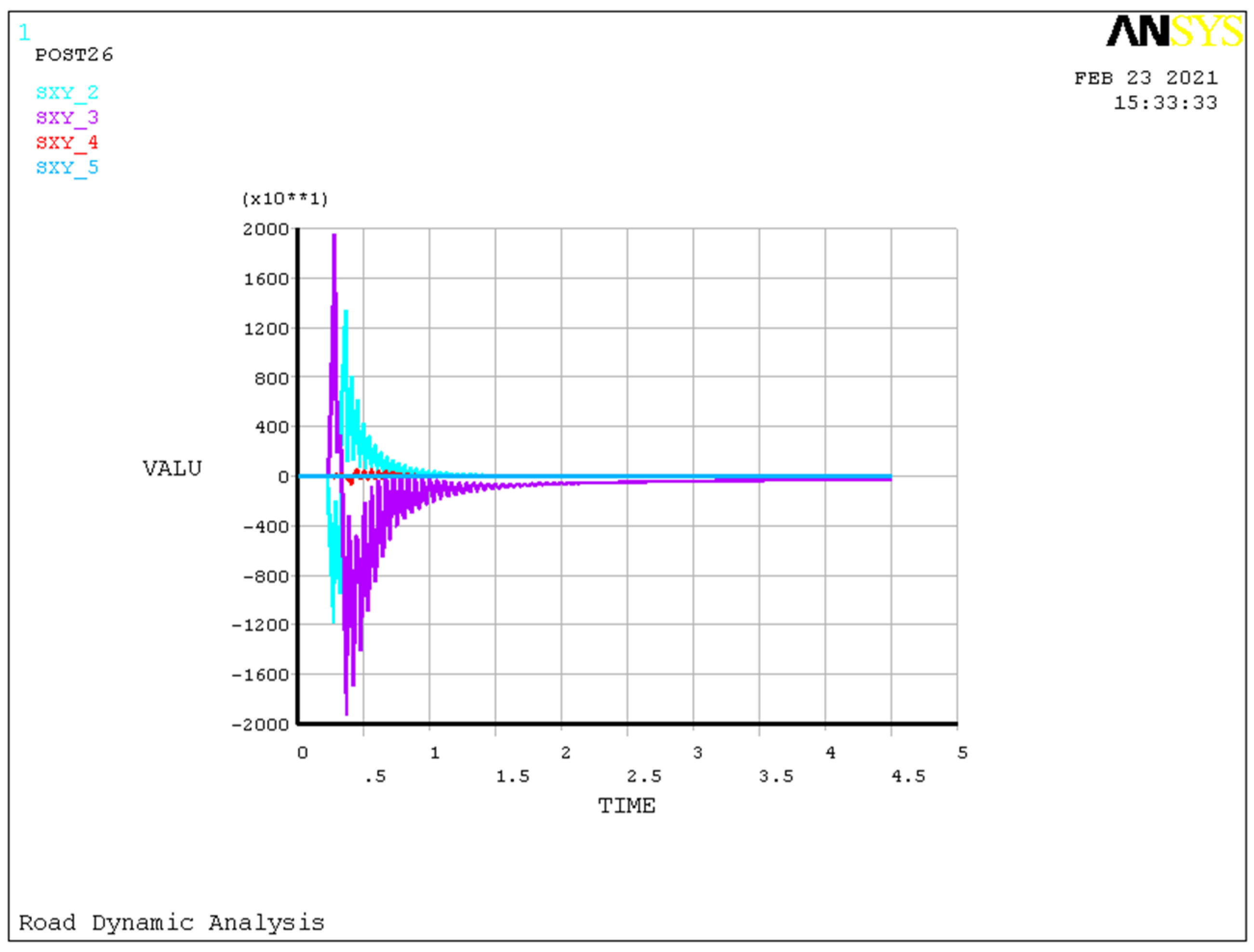
4.2.2. Shear Stress Analysis
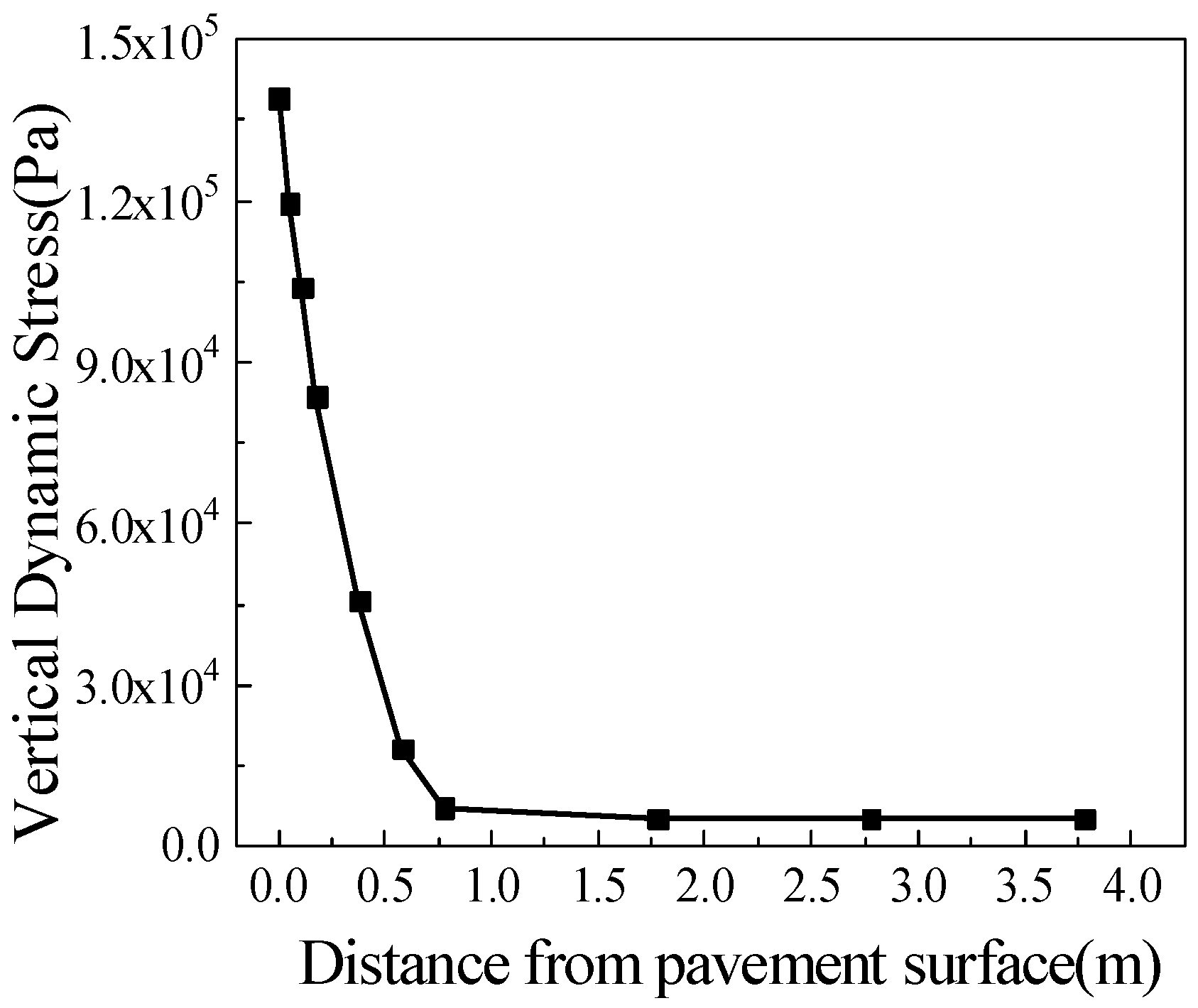
4.3. Vertical Dynamic Stress Analysis
4.4. Stress Analysis of Pavement Considering Tire Starting Force and Braking Force
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols of Vehicle Parameters | Value |
|---|---|
| Body Mass (ms/kN) | 180 |
| Inertial mass (x-axis) (JX/kN·m2) | 20,000 |
| Inertial mass (y-axis) (JY/kN·m2) | 7200 |
| Rear non-suspension mass (mt2/kN) | 15.55 |
| Front non-suspension mass (mt1/kN) | 3.85 |
| Wheel weight (ml1/kN) | 0.15 |
| Vehicle net weight (G/kN) | 200 |
| Rear suspension stiffness coefficient (KS2/kN·m−1) | 4800 |
| Front suspension stiffness coefficient (KS1/kN·m−1) | 1200 |
| Rear suspension damping coefficient (CS2/kN·m−1·s−1) | 20 |
| Front suspension damping coefficient (CS1/kN·m−1·s−1) | 5 |
| Rear-wheel stiffness coefficient (Kt2/kN·m−1) | 9600 |
| Front-wheel stiffness coefficient (Kt1/kN·m−1) | 2400 |
| Rear-wheel damping coefficient (Ct2/kN·m−1·s−1) | 24 |
| Front-wheel damping coefficient (Ct1/kN·m−1·s−1) | 6 |
| The distance from the center of gravity of the car to the rear axle (λ2/m) | 1.5 |
| The distance from the center of gravity of the car to the front axle (λ1/m) | 2.5 |
| The distance from the center of gravity of the car to the right wheel (λ4/m) | 0.9 |
| The distance from the center of gravity of the car to the left wheel (λ3/m) | 0.9 |
Appendix B
| Material Parameters | Thickness (cm) | Elastic Modulus (MPa) | Poisson’s Ratio | Density (Kg·m−3) | |
|---|---|---|---|---|---|
| Surface course | SAC-16 | 5 | 1400 | 0.25 | 2500 |
| AC-20 | 6 | 1200 | 0.25 | 2500 | |
| AC-25 | 7 | 1000 | 0.25 | 2500 | |
| Base course | 6% cement stabilized macadam | 20 | 1000 | 0.25 | 2400 |
| Subbase course | 5% cement stabilized macadam | 20 | 900 | 0.25 | 2400 |
| Bed course | 4% cement stabilized macadam | 20 | 600 | 0.25 | 2300 |
| Subgrade | 300 | 60 | 0.4 | 1900 | |
References
- Jo, Y.; Oh, C.; Kim, S. Estimation of heavy vehicle-involved rear-end crash potential using WIM data. Accid. Anal. Prev. 2019, 128, 103–113. [Google Scholar] [CrossRef] [PubMed]
- Li, Q.; Liu, J.Q. Asphalt pavement evenness deterioration analysis based on the vehicle–pavement interaction. J. Vib. Shock 2018, 37, 76–81, discussion 116. [Google Scholar]
- Lyu, Z.; Qian, J.G.; Shi, Z.H.; Gao, Q. Dynamic responses of layered poroelastic ground under moving traffic loads considering effects of pavement roughness. Soil Dyn. Earthq. Eng. 2020, 130, 105996. [Google Scholar] [CrossRef]
- Walter, V.W. New Resonances and Velocity Jumps in Nonlinear Road-vehicle Dynamics. Procedia IUTAM 2016, 19, 209–218. [Google Scholar]
- Krishnanunni, C.G.; Rao, B.N. Decoupled technique for dynamic response of vehicle–pavement systems. Eng. Struct. 2019, 191, 264–279. [Google Scholar] [CrossRef]
- Zhang, J.H.; Guo, P.; Lin, J.W.; Wang, K.N. A mathematical model for coupled vibration system of road vehicle and coupling effect analysis. Appl. Math. Model. 2016, 40, 1199–1217. [Google Scholar] [CrossRef]
- Zhang, F.; Feng, D.C.; Ling, X.Z.; Li, Q.L. Vertical Coupling Dynamic Model of Heavy Truck-pavement-subgrade. China J. Highw. Transp. 2015, 28, 1–12. [Google Scholar]
- Xu, H.L.; Yuan, Y.; Qu, T.J.; Li, Q.L. Dynamic model for a vehicle–pavement coupled system considering pavement roughness. J. Vib. Shock 2014, 33, 152–156. [Google Scholar]
- Liang, B.; Luo, H.; Ma, X.N. Dynamic model of vertical vehicle-subgrade coupled system under secondary suspension. Appl. Math. Mech. 2007, 28, 769–778. [Google Scholar] [CrossRef]
- Shi, S.R. Coupled Dynamic Analysis Model of Vehicle and Road under Condition of Heavy Vehicle and Interaction Analysis of Vehicle and Road. Master’s Thesis, Chongqing Jiaotong University, Chongqing, China, 2012. [Google Scholar]
- Yang, Y.; Lu, H.; Tan, X.; Chai, H.K.; Wang, R.; Zhang, Y. Fundamental mode shape estimation and element stiffness evaluation of girder bridges by using passing tractor-trailers. Mech. Syst. Signal Process. 2022, 169, 108746. [Google Scholar] [CrossRef]
- Cong, L.; Yang, F.; Guo, G.H.; Ren, M.D.; Shi, J.C.; Tan, L. The use of polyurethane for asphalt pavement engineering applications: A state-of-the-art review. Constr. Build. Mater. 2019, 225, 1012–1025. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, Y.; Tan, X. Review on Vibration-Based Structural Health Monitoring Techniques and Technical Codes. Symmetry 2021, 13, 1998. [Google Scholar] [CrossRef]
- Gui, S.R.; Chen, S.S.; Wan, S. Sensitivity Analysis of Vehicle-Bridge Coupling Random Vibration Based on Road Roughness Spectral Function. J. Vib. Meas. Diagn. 2018, 38, 353–359, discussion 422–423. [Google Scholar]
- Li, H.Y.; Yang, S.P.; Li, S.H. Dynamical analysis of an asphalt pavement due to vehicle–road interaction. J. Vib. Shock 2009, 28, 86–89, discussion 102–205. [Google Scholar]
- He, Y.; Lu, X.Y.; Chu, D.F.; Wu, C.Z. Reliability Estimation of Vehicle Lateral Dynamic Under Vehicle-road-environment Coupling Actions. Automot. Eng. 2019, 41, 800–806. [Google Scholar]
- Ding, H.; Yang, Y.; Chen, L.Q.; Yang, S.H. Vibration of vehicle–pavement coupled system based on a Timoshenko beam on a nonlinear foundation. J. Sound Vib. 2014, 333, 6623–6636. [Google Scholar] [CrossRef]
- Yang, S.H.; Li, S.H.; Lu, Y.J. Investigation on dynamical interaction between a heavy vehicle and road pavement. Veh. Syst. Dyn. 2010, 48, 923–944. [Google Scholar] [CrossRef]
- Zhang, J.N.; Yang, S.H.; Li, S.H.; Ding, H.; Lu, Y.J.; Si, C.D. Study on crack propagation path of asphalt pavement under vehicle–road coupled vibration. Appl. Math. Model. 2021, 101, 481–502. [Google Scholar] [CrossRef]
- Yang, Y.; Yang, L.; Wu, B.; Yao, G.; Li, H.; Robert, S. Safety Prediction Using Vehicle Safety Evaluation Model Passing on Long-Span Bridge with Fully Connected Neural Network. Adv. Civ. Eng. 2019, 2019, 8130240. [Google Scholar] [CrossRef]
- Wang, J.; Li, T.J.; Meng, L.Q. Study on Dynamic Characteristics of Vehicle Based on the Whole Vehicle Model with 7 Freedom. J. Anhui Sci. Technol. Univ. 2013, 27, 72–76. [Google Scholar]
- Liu, J.B.; Du, X.L. Structural Dynamics, 1st ed.; China Machine Press: Beijing, China, 2004; pp. 264–280. [Google Scholar]
- Deng, X.J. Road Bed &Road Surface Project, 1st ed.; China Communication Publishing: Beijing, China, 2001; pp. 27–55. [Google Scholar]
- Lu, Y.J.; Yang, S.H.; Li, S.H.; Chen, L.Q. Numerical and experimental investigation on stochastic dynamic load of a heavy-duty vehicle. Appl. Math. Model. 2010, 34, 2698–2710. [Google Scholar] [CrossRef]
- Othman, M.I.A.; Said, S.; Marin, M. A novel model of plane waves of two-temperature fiber-reinforced thermoelastic medium under the effect of gravity with three-phase-lag model. Int. J. Numer. Methods Heat Fluid Flow 2019, 29, 4788–4806. [Google Scholar] [CrossRef]
- Marin, M.; Othman, M.I.A.; Seadawy, A.R.; Carstea, C. A domain of influence in the Moore–Gibson–Thompson theory of dipolar bodies. J. Taibah Univ. Sci. 2020, 14, 653–660. [Google Scholar] [CrossRef]
- Wu, B.; Zhang, L.L.; Yang, Y.; Liu, L.J.; Ni, Z.J. Refined Time-domain Buffeting Analysis of a Long-span Suspension Bridge in Mountainous Urban Terrain. Adv. Civ. Eng. 2020, 2020, 4703169. [Google Scholar] [CrossRef]





| Location of Structural Layer | Deflection Value (mm) | Location of Structural Layer | Deflection Value (mm) |
|---|---|---|---|
| Surface course | 2.37 | Surface subgrade | 2.34 |
| Base course | 2.35 | Upper part of the subgrade | 1.93 |
| Subbase course | 2.34 | Middle part of the subgrade | 1.06 |
| Bed course | 2.34 | Bottom part of the subgrade | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, B.; Xiao, J.; Shi, S. Establishment of an Eleven-Freedom-Degree Coupling Dynamic Model of Heavy Vehicle-Pavement. Symmetry 2022, 14, 250. https://doi.org/10.3390/sym14020250
Liang B, Xiao J, Shi S. Establishment of an Eleven-Freedom-Degree Coupling Dynamic Model of Heavy Vehicle-Pavement. Symmetry. 2022; 14(2):250. https://doi.org/10.3390/sym14020250
Chicago/Turabian StyleLiang, Bo, Jinghang Xiao, and Shirong Shi. 2022. "Establishment of an Eleven-Freedom-Degree Coupling Dynamic Model of Heavy Vehicle-Pavement" Symmetry 14, no. 2: 250. https://doi.org/10.3390/sym14020250
APA StyleLiang, B., Xiao, J., & Shi, S. (2022). Establishment of an Eleven-Freedom-Degree Coupling Dynamic Model of Heavy Vehicle-Pavement. Symmetry, 14(2), 250. https://doi.org/10.3390/sym14020250