
Solving the Economic Growth Acceleration Model with Memory Effects: An Application of Combined Theorem of Adomian Decomposition Methods and Kashuri–Fundo Transformation Methods



Abstract
1. Introduction
2. Background Theory
2.1. Integral and Fractional Derivative
2.2. Adomian Decomposition Method
2.3. Kashuri–Fundo Transformation
2.4. The Effect of Memory on the Economic Growth Mode
- = FD of order α from Y(t) with respect to t
- = FD operators of order α with respect t, where t > 0
- Y(t) = the value of the number of products produced during the production process
- m = net investment figure (0 < m < 1), i.e., the sharing of profit process for net investment
- a = marginal cost (additional cost if production increases/depends on the value of output)
- k = marginal cost
- b = independent costs (costs that do not depend on the number of products produced
- v = positive constant which is referred to ratio of investment describing the acceleration rate (v > 0)
3. Results and Discussions
3.1. Main Theorems
3.2. The Comparison of the Exact Solution of the Symmetry Lie with Odetunde and Taiwo
- a.
- Tangent Vector
- b.
- Reduced Characteristics
- c.
- Canonical coordinates (r, s)
- d.
- Solving the Riccati Equation
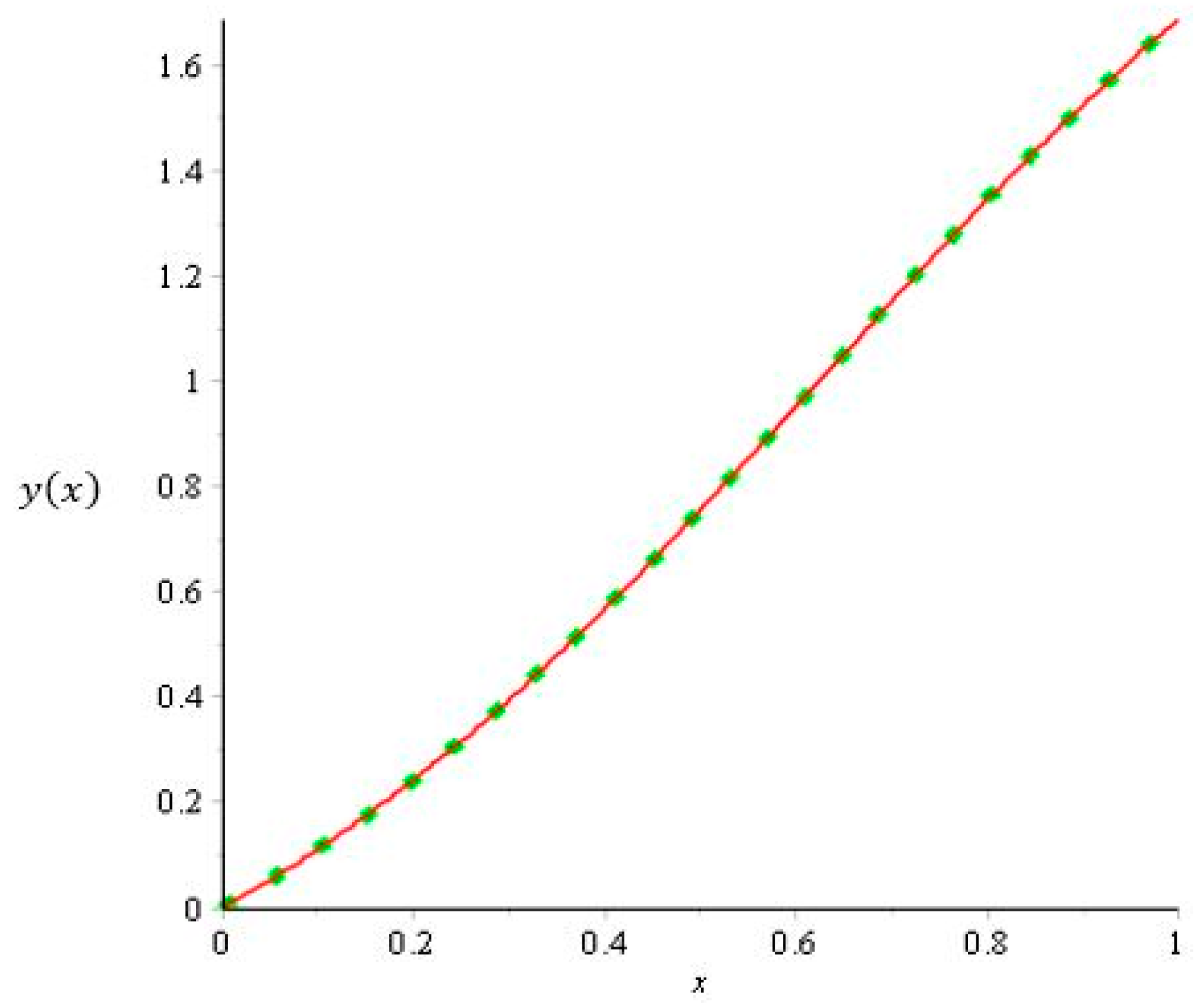
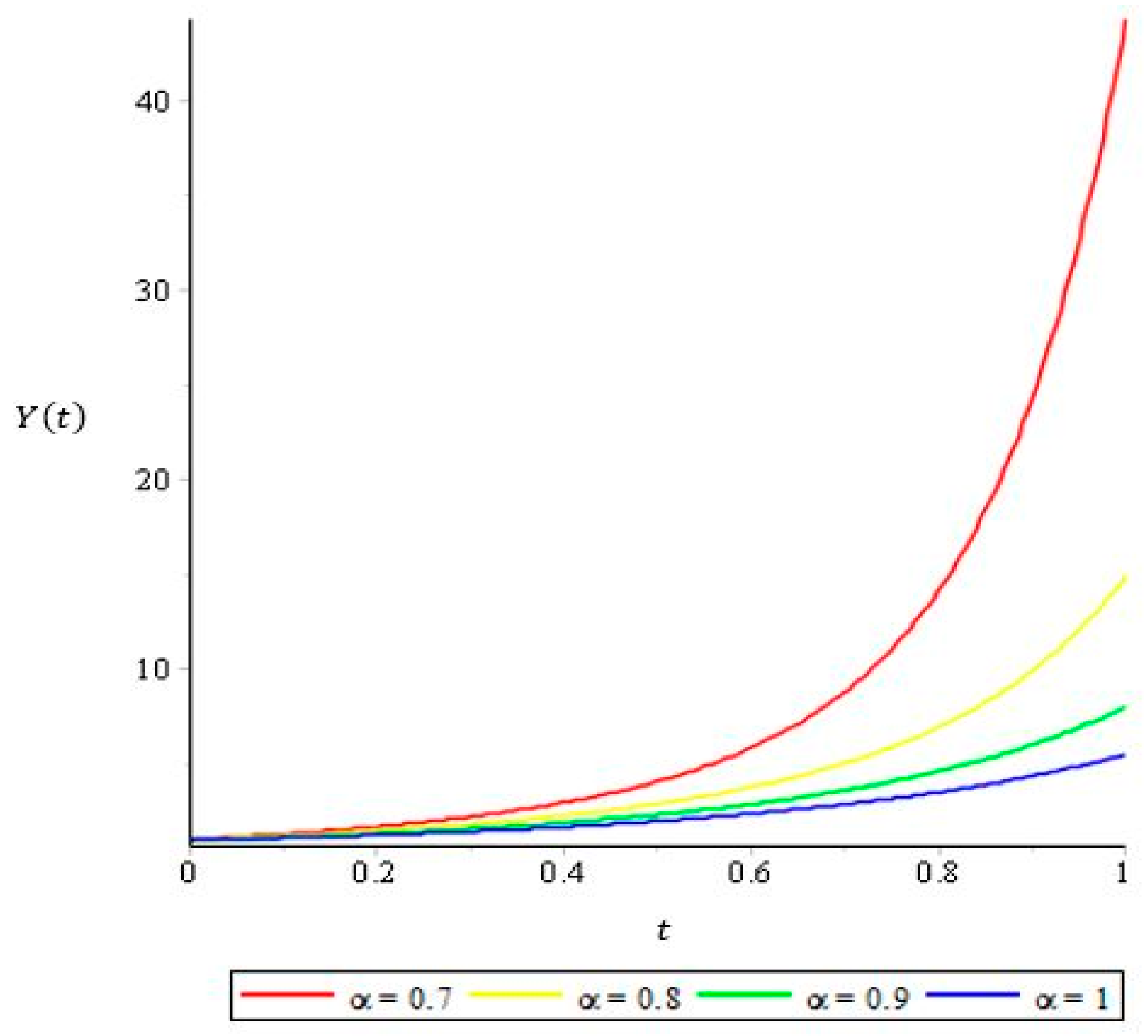
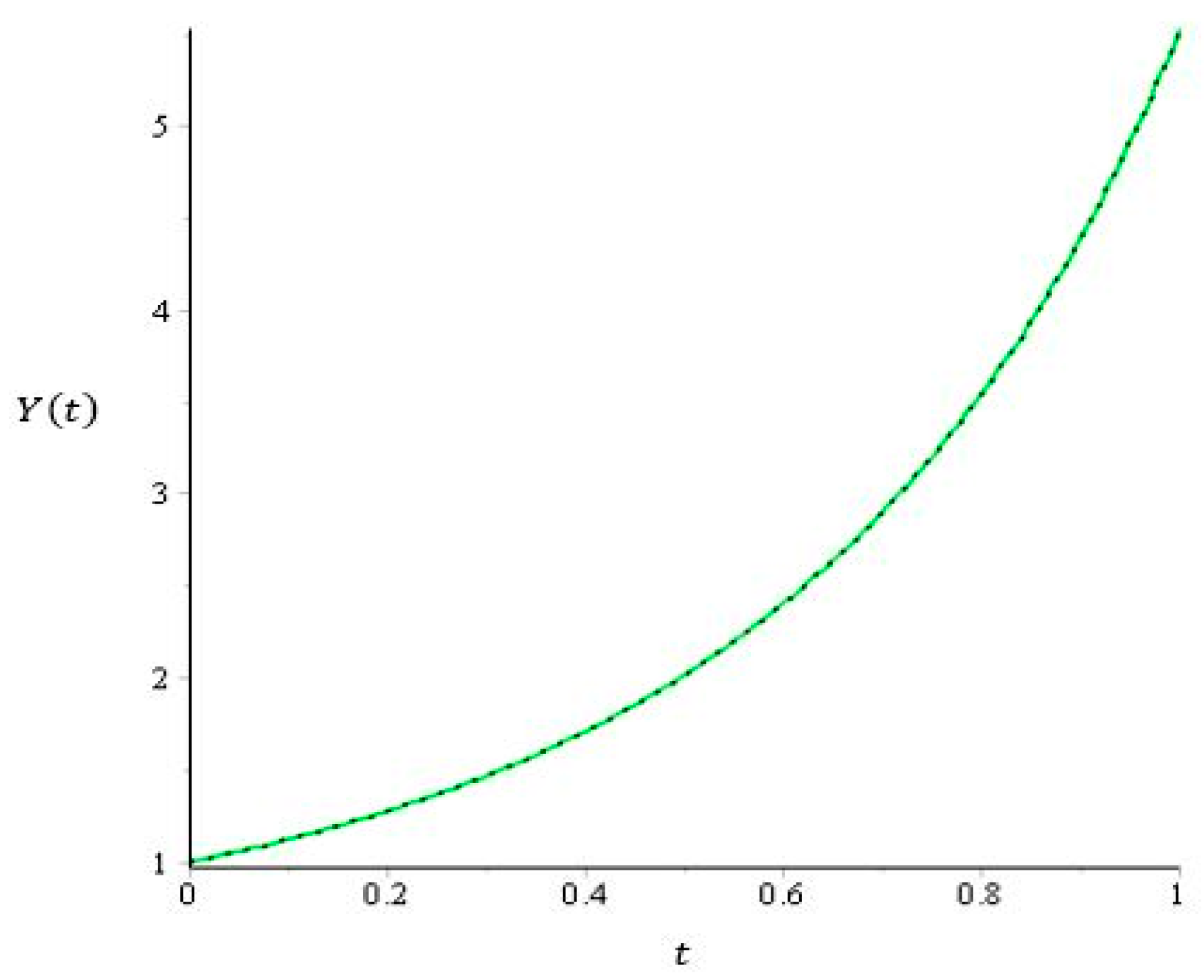
3.3. Numerical Simulation of Economic Growth Model using Combined Theorem
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Johansyah, M.D.; Supriatna, A.K.; Rusyaman, E.; Saputra, J. Application of fractional differential equation in economic growth model: A systematic review approach. AIMS Math 2021, 6, 10266–10280. [Google Scholar] [CrossRef]
- Sukono; Sambas, A.; He, S.; Liu, H.; Vaidyanathan, S.; Hidayat, Y.; Saputra, J. Dynamical analysis and adaptive fuzzy control for the fractional-order financial risk chaotic system. Adv. Differ. Equ. 2020, 674, 674. [Google Scholar] [CrossRef]
- Lin, Z.; Wang, J.; Wei, W. Fractional differential equation models with pulses and criterion for pest management. Appl. Math. Comput. 2015, 257, 398–408. [Google Scholar] [CrossRef]
- Fan, H. Research on High Precision Algorithm Based on the Transformation of Computer Accounting Financial Management and the Transformation of Fractional Differential Equation. IOP J. Phys. Conf. Ser. 2020, 1578, 012054. [Google Scholar] [CrossRef]
- Ma, Y.; Li, W. Application and research of fractional differential equations in dynamic analysis of supply chain financial chaotic system. Chaos Solitons Fractals 2020, 130, 109417. [Google Scholar] [CrossRef]
- Güner, Ö.; Bekir, A. Exact solutions of some fractional differential equations arising in mathematical biology. Int. J. Biomath. 2015, 8, 1550003. [Google Scholar] [CrossRef]
- Oldham, K.B. Fractional differential equations in electrochemistry. Adv. Eng. Softw. 2010, 41, 9–12. [Google Scholar] [CrossRef]
- Gill, V.; Modi, K.; Singh, Y. Analytic solutions of fractional differential equation associated with RLC electrical circuit. J. Stat. Manag. Syst. 2018, 21, 575–582. [Google Scholar] [CrossRef]
- Abro, K.A.; Atangana, A. Mathematical analysis of memristor through fractal-fractional differential operators: A numerical study. Math. Methods Appl. Sci. 2020, 43, 6378–6395. [Google Scholar] [CrossRef]
- Escalante-Martínez, J.E.; Morales-Mendoza, L.J.; Cruz-Orduña, M.I.; Rodriguez-Achach, M.; Behera, D.; Laguna-Camacho, J.R.; López-Cruz, V.M. Fractional differential equation modeling of viscoelastic fluid in mass-spring-magnetorheological damper mechanical system. Eur. Phys. J. Plus 2020, 135, 847. [Google Scholar] [CrossRef]
- Sambas, A.; Vaidyanathan, S.; Tlelo-Cuautle, E.; Abd-El-Atty, B.; Abd El-Latif, A.A.; Guillén-Fernández, O.; Hidayat, Y.; Gundara, G. A 3-D multi-stable system with a peanut-shaped equilibrium curve: Circuit design, FPGA realization, and an application to image encryption. IEEE Access 2020, 8, 137116–137132. [Google Scholar] [CrossRef]
- Vaidyanathan, S.; Sambas, A.; Mamat, M.; Sanjaya, W.S.M. A new three-dimensional chaotic system with a hidden attractor, circuit design and application in wireless mobile robot. Arch. Control. Sci. 2017, 27, 541–554. [Google Scholar] [CrossRef]
- Mou, J.; Sun, K.; Wang, H.; Ruan, J. Characteristic analysis of fractional-order 4D hyperchaotic memristive circuit. Math. Probl. Eng. 2017, 2017, 2313768. [Google Scholar] [CrossRef]
- Daftardar-Gejji, V.; Sukale, Y.; Bhalekar, S. Solving fractional delay differential equations: A new approach. Fract. Calc. Appl. Anal. 2015, 18, 400–418. [Google Scholar] [CrossRef]
- Tavazoei, M.S.; Haeri, M. Unreliability of frequency-domain approximation in recognising chaos in fractional-order systems. IET Signal Processing 2007, 1, 171–181. [Google Scholar] [CrossRef]
- Bhalekar, S.; Daftardar-Gejji, V. Solving fractional-order logistic equation using a new iterative method. Int. J. Differ. Equ. 2012, 2012, 975829. [Google Scholar] [CrossRef][Green Version]
- Mahdy, A.M.S.; Marai, G.M.A. Sumudu decomposition method for solving fractional Riccati equation. J. Abstr. Comput. Math. 2018, 3, 42–50. [Google Scholar]
- Hu, Y.; Luo, Y.; Lu, Z. Analytical solution of the linear fractional differential equation by Adomian decomposition method. J. Comput. Appl. Math. 2008, 215, 220–229. [Google Scholar] [CrossRef]
- Daftardar-Gejji, V.; Jafari, H. Solving a multi-order fractional differential equation using Adomian decomposition. Appl. Math. Comput. 2007, 189, 541–548. [Google Scholar] [CrossRef]
- Bildik, N.; Bayramoglu, H. The solution of two-dimensional non-linear differential equation by the Adomian decomposition method. Appl. Math. Comput. 2005, 163, 519–524. [Google Scholar]
- Ray, S.S.; Bera, R.K. Analytical solution of the Bagley Torvik equation by Adomian decomposition method. Appl. Math. Comput. 2005, 168, 398–410. [Google Scholar] [CrossRef]
- Ren, T.; Xiao, H.; Zhou, Z.; Zhang, X.; Xing, L.; Wang, Z.; Cui, Y. The iterative scheme and the convergence analysis of unique solution for a singular fractional differential equation from the eco-economic complex system’s co-evolution process. Complexity 2019, 2019, 9278056. [Google Scholar] [CrossRef]
- Debnath, B.K.; Majumder, P.; Bera, U.K. Multi-objective sustainable fuzzy economic production quantity (SFEPQ) model with demand as type-2 fuzzy number: A fuzzy differential equation approach. Hacet. J. Math. Stat. 2019, 48, 112–139. [Google Scholar] [CrossRef]
- Su, D. Optimization of Economic Management Dynamic System Based on Differential Equation. Curric. Teach. 2021, 4, 10–17. [Google Scholar]
- Ming, H.; Wang, J.; Fečkan, M. The application of fractional calculus in Chinese economic growth models. Mathematics 2019, 7, 665. [Google Scholar] [CrossRef]
- Tejado, I.; Valério, D.; Pérez, E.; Valério, N. Fractional calculus in economic growth modelling: The Spanish and Portuguese cases. Int. J. Dyn. Control. 2017, 5, 208–222. [Google Scholar] [CrossRef]
- Tarasova, V.V.; Tarasov, V.E. Economic accelerator with memory: Discrete time approach. Probl. Mod. Sci. Educ. 2016, 36, 37–42. [Google Scholar] [CrossRef]
- Tarasov, V.E. On history of mathematical economics: Application of fractional calculus. Mathematics 2019, 7, 509. [Google Scholar] [CrossRef]
- Lü, X.; Chen, S.J. Interaction solutions to non-linear partial differential equations via Hirota bilinear forms: One-lump-multi-stripe and one-lump-multi-soliton types. Nonlinear Dyn. 2021, 103, 947–977. [Google Scholar] [CrossRef]
- Lü, X.; Chen, S.J. New general interaction solutions to the KPI equation via an optional decoupling condition approach. Commun. Nonlinear Sci. Numer. Simul. 2021, 103, 105939. [Google Scholar] [CrossRef]
- Yin, M.Z.; Zhu, Q.W.; Lü, X. Parameter estimation of the incubation period of COVID-19 based on the doubly interval-censored data model. Nonlinear Dyn. 2021, 106, 1347–1358. [Google Scholar] [CrossRef] [PubMed]
- Yin, Y.H.; Chen, S.J.; Lü, X. Localized characteristics of lump and interaction solutions to two extended Jimbo–Miwa equations. Chin. Phys. B 2020, 29, 120502. [Google Scholar] [CrossRef]
- Dai, D.D.; Ban, T.T.; Wang, Y.L.; Zhang, W. Using piecewise reproducing kernel method and Legendre polynomial for solving a class of the time variable fractional order advection-reaction-diffusion equation. Therm. Sci. 2021, 25, 1261–1268. [Google Scholar] [CrossRef]
- He, C.H. An introduction to an ancient Chinese algorithm and its modification. Int. J. Numer. Methods Heat Fluid Flow 2016, 26, 2486–2491. [Google Scholar] [CrossRef]
- Han, C.; Wang, Y.L.; Li, Z.Y. Numerical Solutions of Space Fractional Variable-Coefficient Kdv–Modified Kdv Equation by Fourier Spectral Method. Fractals 2021, 12, 2150246. [Google Scholar] [CrossRef]
- Petráš, I. Fractional-Order Non-Linear Systems: Modeling, Analysis and Simulation; Springer Science & Business Media: Berlin, Germany, 2011. [Google Scholar]
- Kashuri, A.; Fundo, A. A new integral transform. Adv. Theor. Appl. Math. 2013, 8, 27–43. [Google Scholar]
- Kurniadi, E.; Supriatna, A.K. Lie Symmetry and Lie Bracket in Solving Differential Equation Models of Functional Materials: A Survey. J. Sci. Data Anal. 2020, 1, 154–159. [Google Scholar] [CrossRef]
- Odetunde, O.S.; Taiwo, O.A. A decomposition algorithm for the solution of fractional quadratic Riccati differential equations with Caputo derivatives. Am. J. Comput. Appl. Math. 2014, 4, 83–91. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Solution (Parameter) | ||||
|---|---|---|---|---|
| 0 | 1 | 1 | 1 | 1 |
| 0.2 | 1.728498143 | 1.506712214 | 1.369271728 | 1.276860564 |
| 0.4 | 3.002050323 | 2.316656002 | 1.944323102 | 1.711986036 |
| 0.6 | 5.882651068 | 3.824839163 | 2.915933103 | 2.408325602 |
| 0.8 | 14.19800451 | 6.984128952 | 4.655630493 | 3.555588489 |
| 1 | 44.34351690 | 14.96196042 | 8.080142879 | 5.539184163 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Johansyah, M.D.; Supriatna, A.K.; Rusyaman, E.; Saputra, J. Solving the Economic Growth Acceleration Model with Memory Effects: An Application of Combined Theorem of Adomian Decomposition Methods and Kashuri–Fundo Transformation Methods. Symmetry 2022, 14, 192. https://doi.org/10.3390/sym14020192
Johansyah MD, Supriatna AK, Rusyaman E, Saputra J. Solving the Economic Growth Acceleration Model with Memory Effects: An Application of Combined Theorem of Adomian Decomposition Methods and Kashuri–Fundo Transformation Methods. Symmetry. 2022; 14(2):192. https://doi.org/10.3390/sym14020192
Chicago/Turabian StyleJohansyah, Muhamad Deni, Asep K. Supriatna, Endang Rusyaman, and Jumadil Saputra. 2022. "Solving the Economic Growth Acceleration Model with Memory Effects: An Application of Combined Theorem of Adomian Decomposition Methods and Kashuri–Fundo Transformation Methods" Symmetry 14, no. 2: 192. https://doi.org/10.3390/sym14020192
APA StyleJohansyah, M. D., Supriatna, A. K., Rusyaman, E., & Saputra, J. (2022). Solving the Economic Growth Acceleration Model with Memory Effects: An Application of Combined Theorem of Adomian Decomposition Methods and Kashuri–Fundo Transformation Methods. Symmetry, 14(2), 192. https://doi.org/10.3390/sym14020192