1. Introduction
In this research, we consider the NS-ABC-FD equation, which is as follows, and then investigate its multiple-HU-
-stability using a multiple fuzzy controller. We have
for
and the continuous function
.
and
are
-fractional derivative operators.
is the nonlinear operator such that
and
. Also, for
,
. Researchers have recently investigated the existence of a unique solution for another
-FDE defined by
where
is the
-fractional derivative operator and
[
1]. The function
in Equation (
2) is the same function in Equation (
1).
The rest of this article is organized as follows. In the
Section 2, we first state the basic concepts and theorems needed to prove the new results. To do so, we introduce the SMVFBS, the multiple control function and define the Mittag–Leffler function (M-L-F), the Wright function (W-F) and
-Fox function (
-F-F); then, we further consider the aggregation function (AG-F) as well as the optimal function which the minimum function as the control function. In
Section 3, we state and prove the main theorem, the multiple-HU-
-stability of the NS-ABC-FDE, using the desired control function. At the end, we provide an example to demonstrate the application of the theorem.
2. Preliminaries
In this section, we provide the basic concepts, theorems, and definitions needed to prove the main results.
Definition 1. The fractional derivative of the function , where , is defined by [
2]
such that for satisfying . Definition 2. -Riemann–Liouville fractional derivative of the function , is described as follows,where . Definition 3. -fractional integral of the function , is given by [
3]
: Lemma 1 ([
4,
5])
. The Newton–Leibniz formula for the -fractional derivative and -fractional integral of the function satisfyThis formula has also been proved for the Caputo–Fabrizio derivative in both continuous and discrete states, as well as for the same derivative in the discrete state. Definition 4. The Riemann–Liouville fractional integral of order for the function is defined as follows, [
6]
where for , and Definition 5 ([
6])
. For a continuous function , the Caputo fractional derivative is defined as follows,where and is the integer part of . Lemma 2 ([
6])
. For any and , the following equation holdswhere , . Remark 1 ([
4])
. is a solution of (1) if and only if for and , we havewhere
for the function
defined by Equation (
5), we have
for all ;
the function is a decreasing multivalued function and
; and
with an assumption of for .
Definition 6 ([
7])
. Due to the importance of M-L-F in fractional calculus, this function, which is a generalization of the exponential function, defined bywhere , and is a gamma function. The first generalization of the M-L-F with two parameters is shown by the following series,with , and Definition 7 ([
7])
. For and the path in the complex plane , -F-F is defined as follows,wherewith , , , . An empty product, when it occurs, is taken to be one. SoDue to the occurrence of the factor in the integrand of (6). the function is, in general, multi-valued, but it can be made one-valued on the Riemann surface of by choosing a proper branch. We also note that when the σ and ϵ are equal to 1, we obtain the G-functions The above integral representation of the functions, by involving products and ratios of Gamma functions, is known to be of Mellin–Barnes integral type. A compact notation is usually adopted for (6) Definition 8 ([
7])
. The classical W-F of order that we denote by is defined by the series representation convergent in the whole complex plane,for . Definition 9 ([
7])
. We consider the interval as . function for fixed , is an ℓ-ary-AG-F if it is nondecreasing in each variable, that isholds for arbitrary ℓ-tuples and fulfills the BV conditions, i.e.,or, equivalently,A specific case is the aggregation of a singleton, i.e., the unary function for all . convention is considered for this function.
For simplicity, we denote the AG-F by , where ℓ is the number of function variables. In the following, we mention some examples of AG-F.
, which is the arithmetic mean function, is defined as follows:
, which is the geometric mean function, is defined as follows:
, which is the projection function, is defined as follows:
where
and with
th argument. In this definition,
is the
th lowest coordinate of
, i.e.,
The projection function is defined as follows in the first and last coordinates, respectively:
In addition, the order statistic function
is defined as follows with the
th argument and the
th lowest coordinate,
for any
. Similarly, the extreme order statistics
and
are respectively the minimum and maximum functions,
which will sometimes be written by means of the lattice operations ∧ and ∨, respectively, that is,
The median of an odd number of values
is simply defined by
For an even number of values
, the median is defined by
Definition 10. is an idempotent function if , that is, for all . Idempotency is in some areas supposed to be a natural property of AG-Fs, e.g., in multicriteria decision making, where it is commonly accepted that if all criteria are satisfied at the same degree , implicitly assuming the commensurateness of criteria, then also the overall score should be .
The AG-F introduced above are idempotent. Here are some examples of nonidempotent AG-Fs.
The product , where means any of four kinds of intervals, with boundary points ı and ȷ, and with convention .
The sum function .
Consider a set of all diagonal matrices of dimension
ℓ with values
as follows,
we have
Each
, is defined as follows,
where
. Based on this, we can consider the following items,
Definition 11 ([
6])
. A mapping is called a GTN if:- (a)
(boundary condition);
- (b)
(commutativity);
- (c)
(associativity);
- (d)
(monotonicity);
If for every and each sequence and converging to and we gettherefore, ⊛
is continuous in (briefly CGTN). For instance,
(1) Define
, such that
then
is CGTN (minimum CGTN).
(2) Define
, such that
then
is CGTN (product CGTN).
(3) Define
, such that
then
is CGTN (Lukasiewicz CGTN).
Numerical examples of CGTN include the following:
By observing the above calculations, we have in general
We consider the increasing MVFF
on the linear space as
. This function is continuous from the left, and also
for any
. If
is another MVFF, then for the relation ⪯, we have
Definition 12. Consider the CGTN ⊛, linear space and MVFS. Triple is called a SMVFNS if
- (ℵ1)
for all if and only if ;
- (ℵ2)
for each and with ;
- (ℵ3)
for each and ; and
- (ℵ4)
for any and for all .
A complete SMVFNS is called SMVFBS [
7].
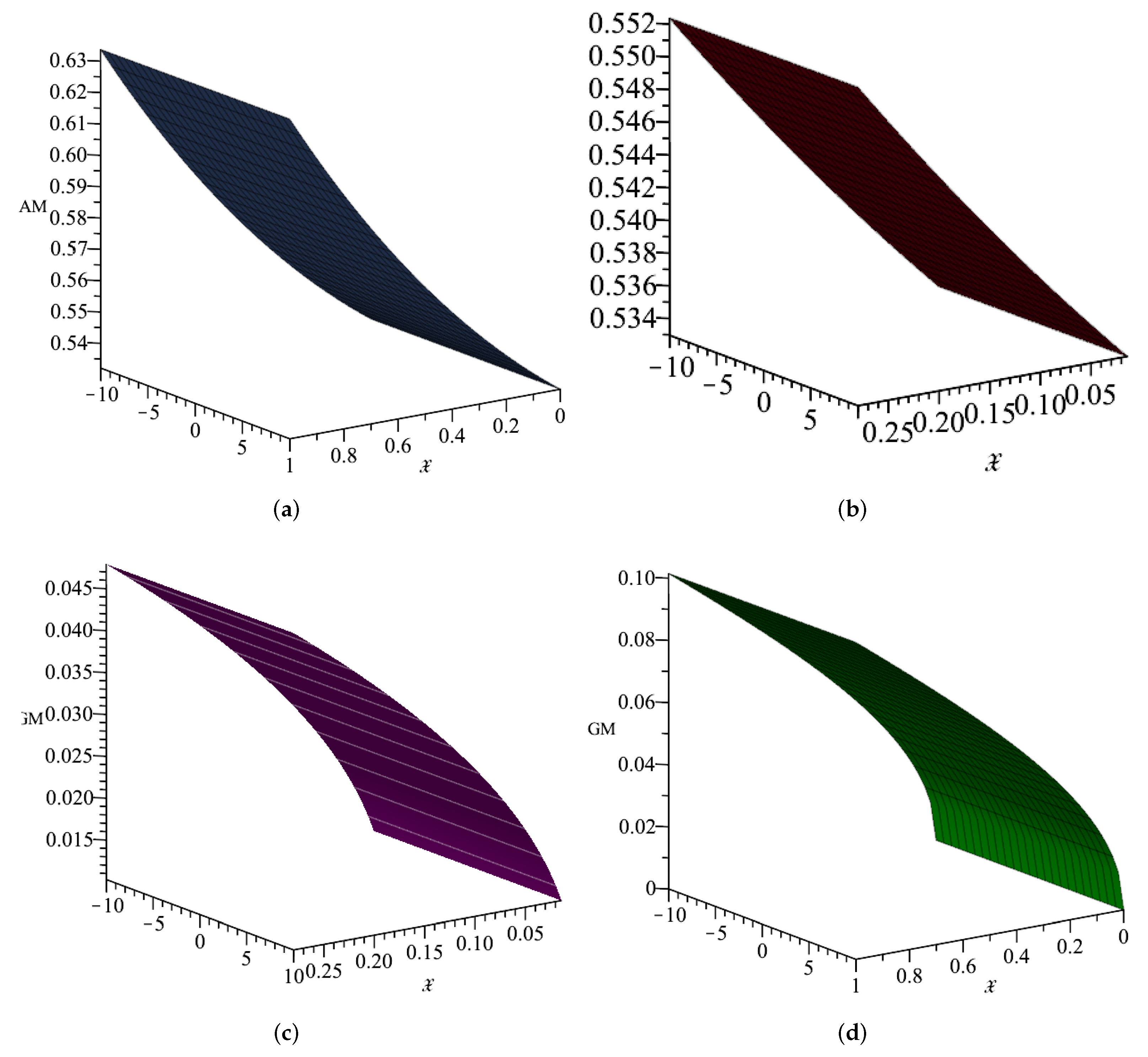
For values
, consider the function
Next,
we calculate the aggregation functions introduced above for different values and present the results in the table below. By comparing the obtained results, we consider the aggregation function of the minimum type to construct the control function. Therefore, we define the control function as follows:
Table 1 and
Figure 1a–d help us to select optimum control function for our results.
Theorem 1 ([
7])
. Consider the -valued metric space . For , construct the self-mapping on bywhere . Let . Therefore,- (i)
or
- (ii)
there is a where
Then
- (1)
of as a FP
- (2)
in is the unique FP of
- (3)
for each .
Definition 13. Let function be a MVFF. The Equation (1) is said to be multiple-HU- stable, if is a given differentiable function satisfyingfor , and we can find a solution of Equation (1) such that for some , Our method can be used to get new results from [
8,
9,
10,
11].
3. Multiple-HU- Stability for NS-ABC-FDE
Now, we use the FPT based on the Theorem 1 to show (
1) is multiple-HU-
stable in SMVFBS
with MVFF
.
We define the set
as follows
and
, is given by
Theorem 2. is a complete -valued metric space.
Proof. We first have
if and only if
. Assume that
, then
and then
for all
. Let
tend to zero in the above inequality, we get
Thus
for every
, and vice versa. Moreover, we have
for every
. Now, let
and
. Then, we have
and
for each
. Then we have
and then,
and
. Now we show that
is complete. For this purpose, we consider a Cauchy sequence like
and assume that
. We consider
For
choose
where
Consequently,
and so
and then
is a Cauchy sequence in complete space
on compact set
and uniformly converges to
. Therefore, taking into account the uniformly convergent property,
, that is,
℘ is a differentiable function. Therefore, the completeness of
is the result. □
Here, we are ready to study multiple-HU-
stability and approximate NS-ABC-FDEs (
1).
Theorem 3. Let be a SMVFBS and consider the constants ϵ, γ and ϱ where . Let
- ▸
- ▸
- ▸
By considering the MVFF as the control function, we have
Let be a differentiable function satisfyingand then, there is a unique solution for Equation (1) such thatwhere , and . Proof. We set
and introduce the
-valued metric on
as
By Theorem 2, we have is a complete -valued metric space.
Step 1. Now, we define the mapping
, as follows,
for
.
Let
and consider the coefficient
with
, thus
for all
and
. Applying (
) and (
), we imply that
In the following, we have
From (
22)–(
24), we have
which implies that
and then
where
; therefore,
is a contractional mapping.
Step 2. We will show that .
Let
, and we have
for every
. Then we have
.
Therefore, all conditions of Theorem 1 are satisfied. Thus,
- (1)
(a FP); and
- (2)
in
we get
or equivalently
- (3)
By using Inequality (
26), we get
Hence, the Equation (
1) is multiple-HU-
stable.
Assume that
and consider
satisfying (
28), then
To show
is a FP of
and
, we apply (
29), and get
.
Now, we show that
. Let
,
, i.e.,
From (
17), (
30) we have
and using Equation (
29), we get
In the sequel, considering Equation (
30) and using step 1, we have
and then
□









{kind=link}
{kind=link}