
Global and Local Dynamics of a Bistable Asymmetric Composite Laminated Shell


Abstract
:1. Introduction
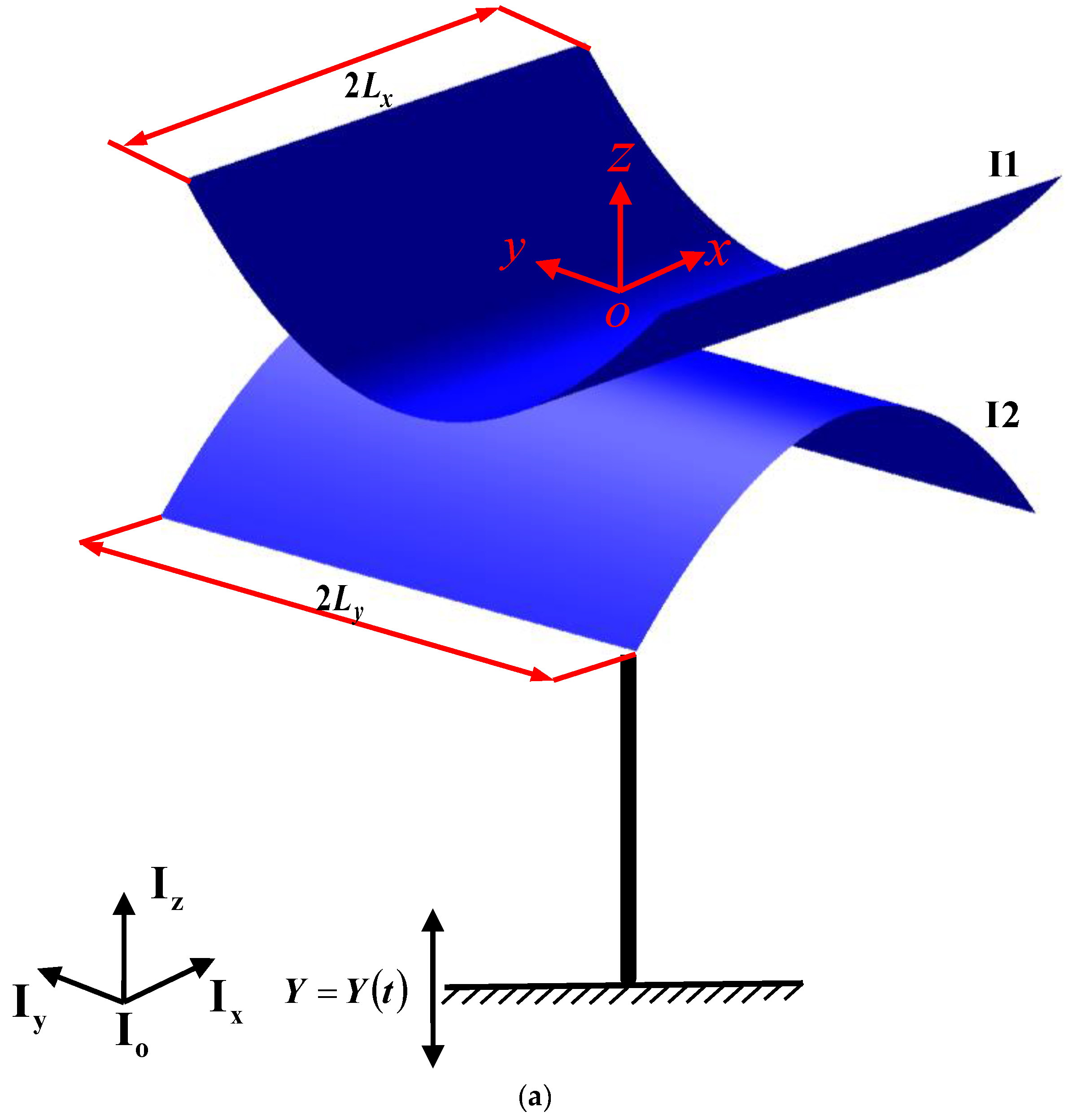
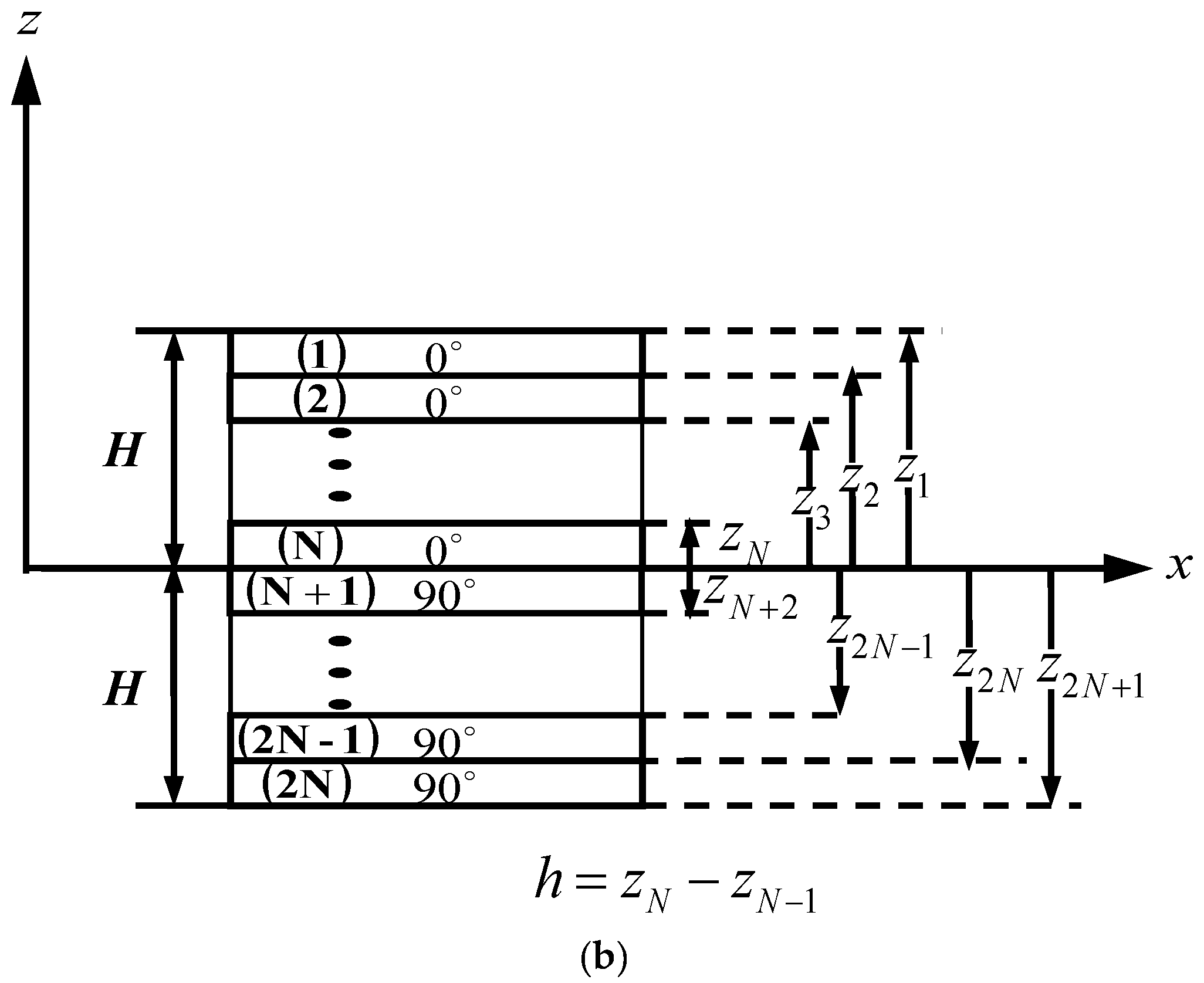
2. Equation of Motion for Global Dynamics
- (1)
- The bistable plate model takes the zero plane before curing as the datum plane, while the bistable shell model takes the static surface that represents a stable equilibrium configuration after curing as the datum plane.
- (2)
- The bistable plate and shell models are converted to each other by the static displacement generated after curing.
- (3)
- The middle plane is assumed to be a neutral surface.
3. Three Equilibrium Configurations
4. Equation of Motion for Local Dynamics
5. Numerical Simulation
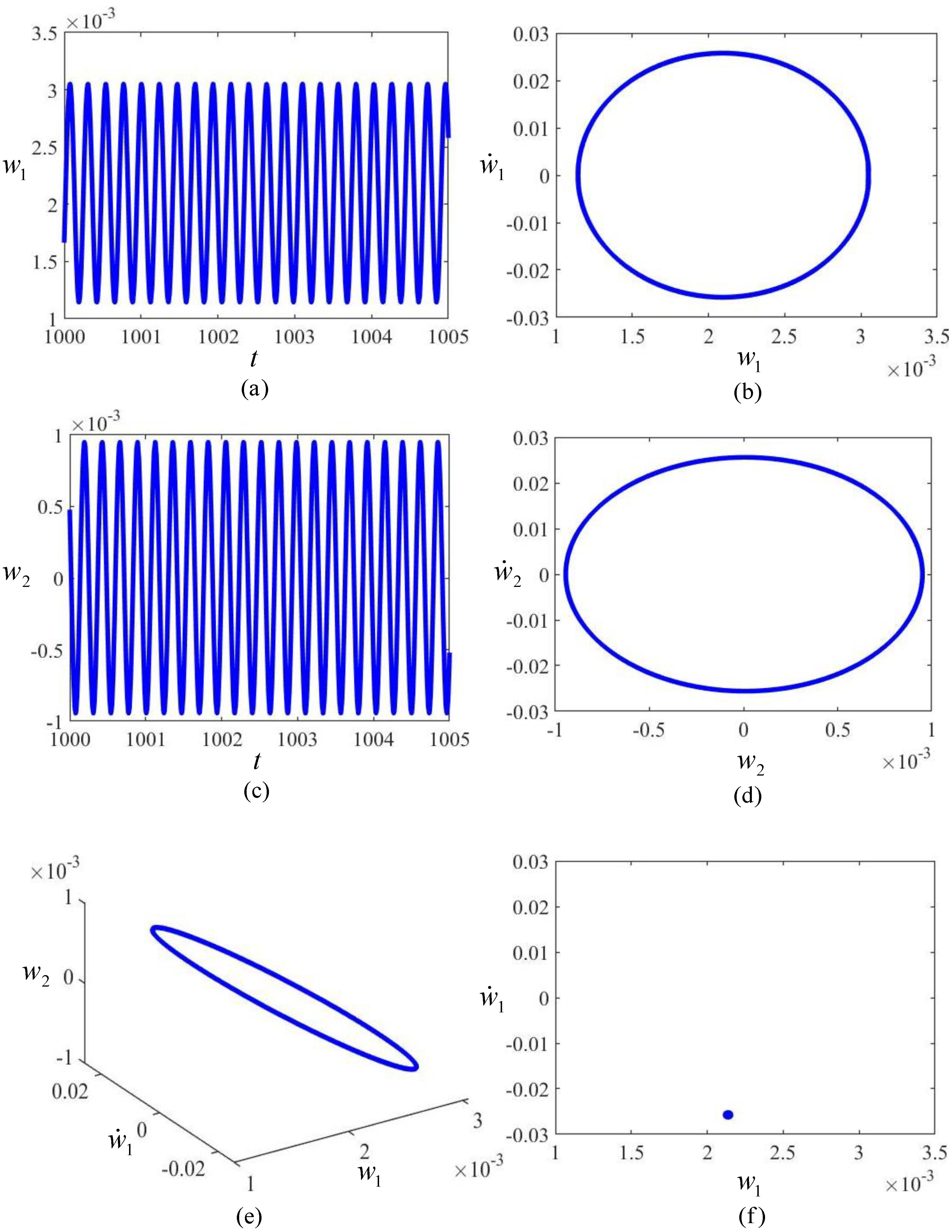
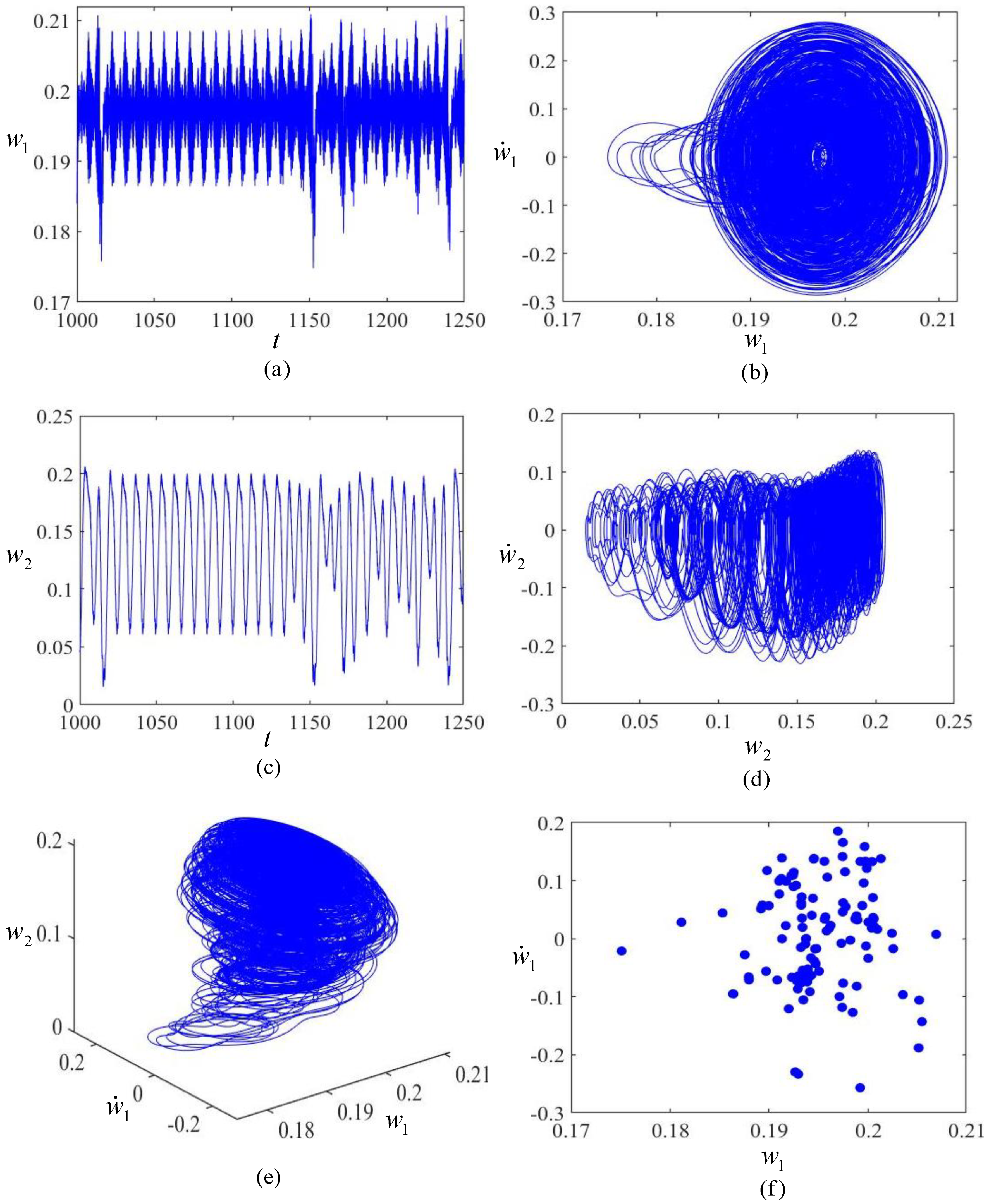
5.1. Global Dynamics
5.2. Local Dynamics
6. Conclusions
- (1)
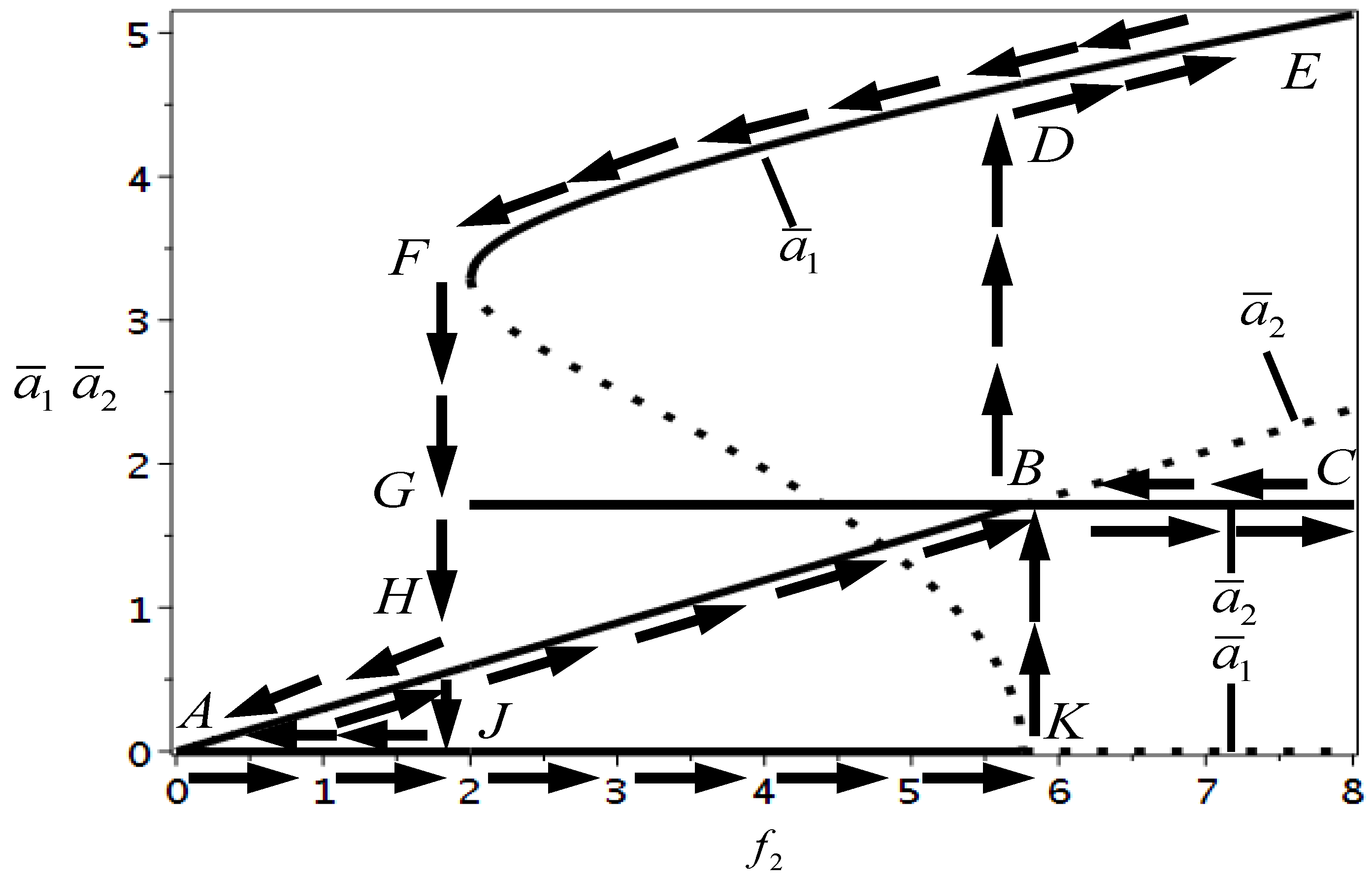
- Choosing difference temperature ΔT as the controlling parameter, the super-critical pitchfork bifurcation can be obtained. When ΔT is set to a specific value, three equilibrium configurations corresponding to two stable equilibrium configurations and one unstable equilibrium configuration are determined.
- (2)
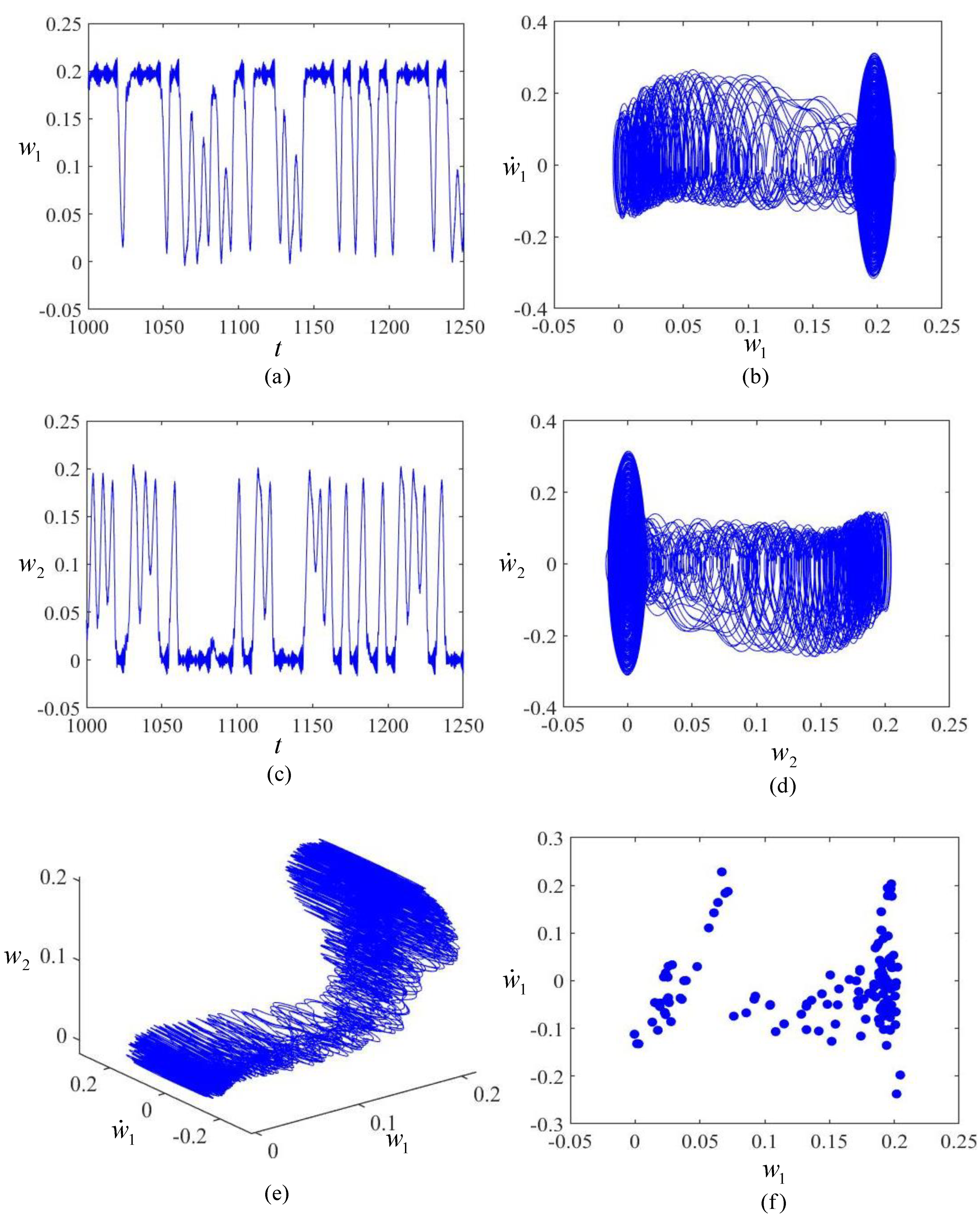
- The global dynamics behave as the snap-through between the two stable equilibrium configurations and the vibrations around the two stable equilibrium configurations respectively.
- (3)
- The dynamic snap-through of the bistable system often occurs in chaos. In other words, the bistable system is often accompanied by the chaotic vibration in the process of the dynamic snap-through.
- (4)
- In the global dynamics, the vibrations behave as the periodic vibration, the quasi-periodic vibration and the chaotic vibration.
- (5)
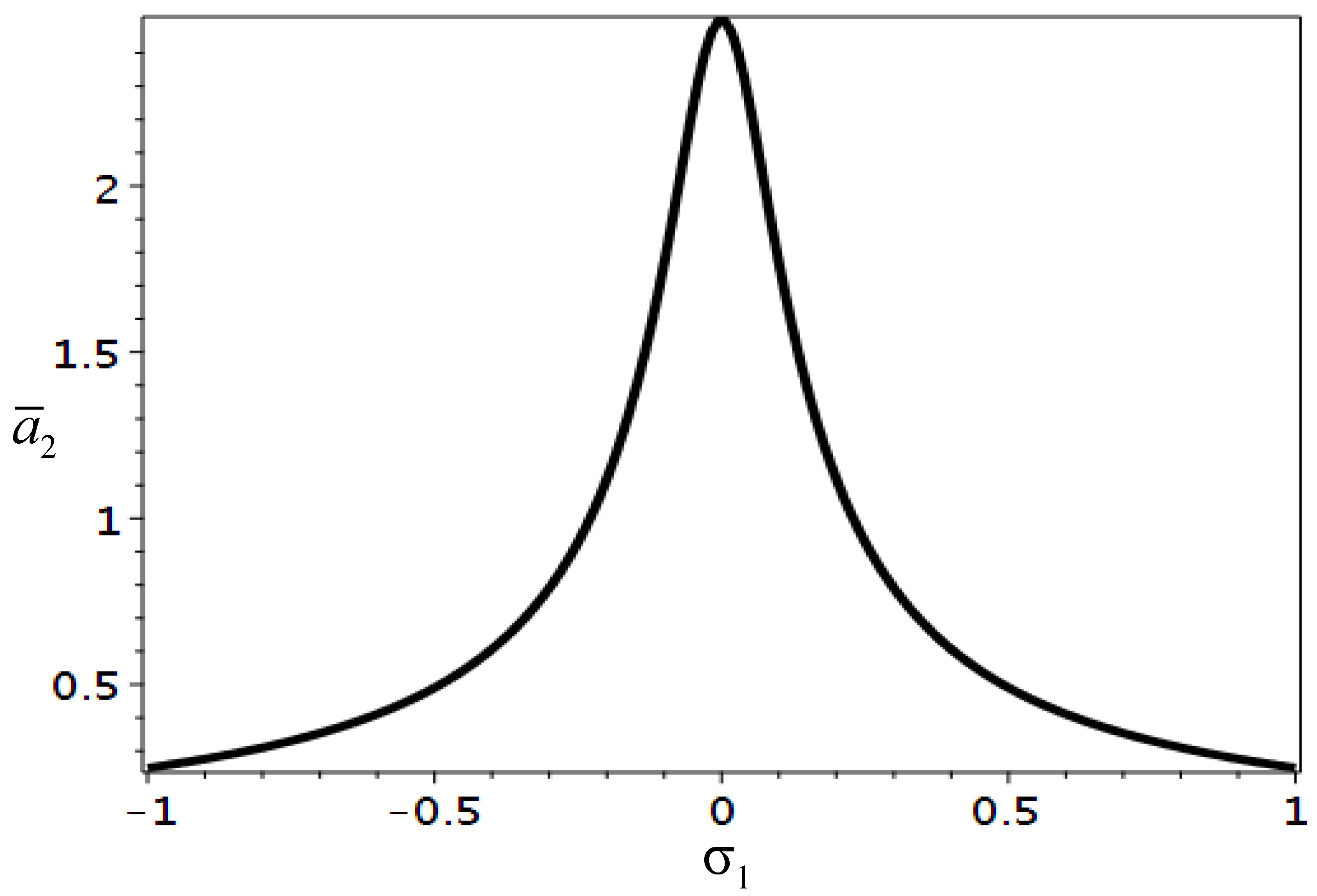
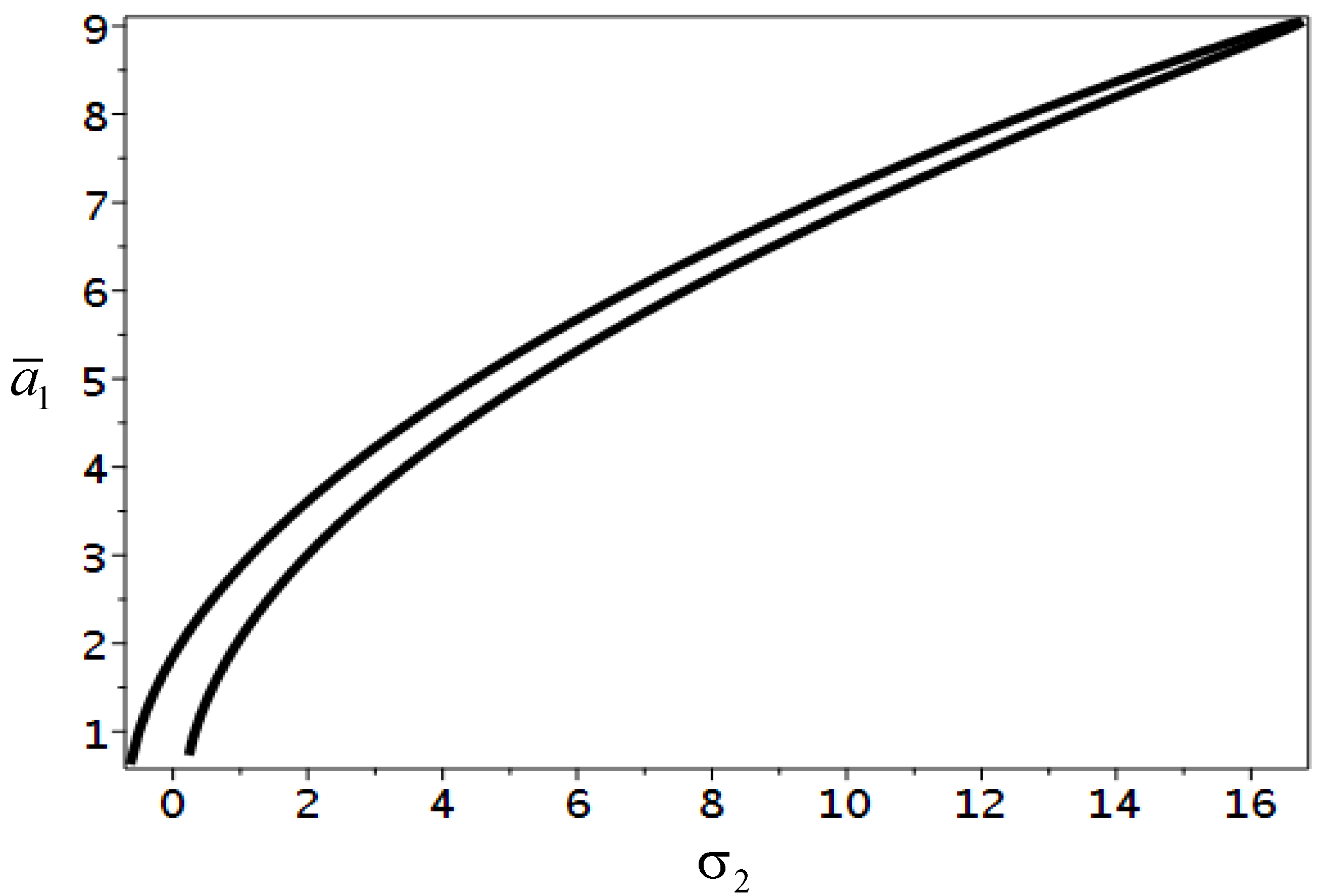
- In the local dynamics, saturation and permeation occur in the process of the 1:2 internal resonance.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dano, M.L.; Hyer, M.W. Thermally-induced Deformation Behavior of Unsymmetric Laminates. Int. J. Solids Struct. 1998, 35, 2101–2120. [Google Scholar] [CrossRef]
- Hyer, M.W. Calculations of the room-temperature shapes of unsymmetric laminates. J. Compos. Mater. 1981, 15, 296–310. [Google Scholar] [CrossRef]
- Wilkie, W.K.; Bryant, R.G.; High, J.W.; Fox, R.L.; Hellbaum, R.F.; Jalink, A.; Little, B.D.; Mirick, P.H. Low-cost piezocomposite actuator for structural control applications. In Proceedings of the 7th Annual International Symposium on Smart Structures and Materials, Newport Beach, CA, USA, 5–9 March 2000. [Google Scholar]
- Dai, F.; Li, H.; Du, S. Cured Shape and Snap-Through of Bistable Twisting Hybrid [0/90/Metal] Laminates. Compos. Sci. Technol. 2013, 86, 76–81. [Google Scholar] [CrossRef]
- Betts, D.; Salo, A.; Bowen, C.; Kim, H. Characterisation and modelling of the cured shapes of arbitrary layup bistable composite laminates. Compos. Struct. 2010, 92, 1694–1700. [Google Scholar] [CrossRef]
- Sorokin, S.V.; Terentiev, A.V. On Modal Interaction, Stability and Non-linear Dynamics of a Model of two degrees of freedom Mechanical System Performing Snap-through Motion. Nonlinear Dyn. 1998, 16, 239–257. [Google Scholar] [CrossRef]
- Dano, M.L.; Hyer, M.W. Snap-through of unsymmetric fiber reinforced composite laminates. Int. J. Solids Struct. 2002, 39, 175–198. [Google Scholar] [CrossRef]
- Cantera, M.A.; Romera, J.M.; Adarraga, I.; Mujika, F. Modelling and Testing of the Snap-Through Process of Bistable Cross-Ply Composites. Compos. Struct. 2015, 120, 41–52. [Google Scholar] [CrossRef]
- Portela, P.M.; Camanho, P.P.; Weaver, P.M.; Bond, I.P. Analysis of morphing, multi-stable structures actuated by piezoelectric patches. Comput. Struct. 2008, 86, 347–356. [Google Scholar] [CrossRef]
- Dano, M.L.; Hyer, M.W. SMA-induced snap-through of unsymmetric fiber-reinforced composite laminates. Int. J. Solids Struct. 2003, 40, 5949–5972. [Google Scholar] [CrossRef]
- Dano, M.; Hyer, M.W. The response of unsymmetric laminates to simple applied forces. Mech. Adv. Mater. Struct. 1996, 3, 65–80. [Google Scholar] [CrossRef]
- Pirrera, A.; Avitabile, D.; Weaver, P.M. On the thermally induced bistability of composite cylindrical shells for morphing structures. Int. J. Solids Struct. 2012, 49, 685–700. [Google Scholar] [CrossRef] [Green Version]
- Moore, M.; Ziaei-Rad, S.; Salehi, H. Thermal response and stability characteristics of bistable composite laminates by considering temperature dependent material properties and resin layers. Appl. Compos. Mater. 2013, 20, 87–106. [Google Scholar] [CrossRef]
- Brampton, C.J.; Betts, D.N.; Bowen, C.R.; Kim, H.A. Sensitivity of bistable laminates to uncertainties in material properties, geometry and environmental conditions. Compos. Struct. 2013, 102, 276–286. [Google Scholar] [CrossRef] [Green Version]
- Potter, K.D.; Weaver, P.M. A concept for the generation of out-of plane distortion from tailored frp laminates. Composites Part A Appl. Sci. Manuf. 2004, 35, 1353–1361. [Google Scholar] [CrossRef]
- Diaconu, C.G.; Weaver, P.M.; Mattioni, F. Concepts for morphing airfoil sections using bistable laminated composite structures. Thin Walled Struct. 2008, 46, 689–701. [Google Scholar] [CrossRef]
- Mattioni, F.; Weaver, P.M.; Potter, K.D.; Friswell, M.I. The application of residual stress tailoring of snap-through composites for variable sweep wings. In Proceedings of the 47th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Newport, RI, USA, 1–4 May 2006. [Google Scholar]
- Hyer, M.W. The room-temperature shapes of four-layer unsymmetric cross-ply laminates. J. Compos. Mater. 1982, 16, 318–340. [Google Scholar] [CrossRef]
- Pirrera, A.; Avitabile, D.; Weaver, P.M. Bistable plates for morphing structures: A refined analytical approach with high-order polynomials. Int. J. Solids Struct. 2010, 47, 3412–3425. [Google Scholar] [CrossRef] [Green Version]
- Hufenbach, W.; Gude, M.; Kroll, L. Design of multistable composites for application in adaptive structures. Compos. Sci. Technol. 2002, 62, 2201–2207. [Google Scholar] [CrossRef]
- Ren, L.B. A theoretical study on shape control of arbitrary lay-up laminates using piezoelectric actuators. Compos. Struct. 2008, 83, 110–118. [Google Scholar] [CrossRef]
- Kim, H.A.; Betts, D.N.; Salo, A.I.T.; Bowen, C.R. Shape memory alloy-piezoelectric active structures for reversible actuation of bistable composites. AIAA J. 2010, 48, 1265–1268. [Google Scholar] [CrossRef]
- Schultz, M.R.; Hyer, M.W.; Williams, R.B.; Wilkie, W.K.; Inman, D.J. Snap-through of Unsymmetric Laminates Using Piezocomposite Actuators. Compos. Sci. Technol. 2006, 66, 2442–2448. [Google Scholar] [CrossRef] [Green Version]
- Arrieta, A.F.; Bilgen, O.; Friswell, M.I.; Hagedorn, P. Dynamic control for morphing of bistable composites. J. Intell. Mater. Syst. Struct. 2013, 24, 266–273. [Google Scholar] [CrossRef]
- Arrieta, A.F.; Neild, S.A.; Wagg, D.J. Nonlinear dynamic response and modelling of a bistable composite plate for applications to adaptive structures. Nonlinear Dyn. 2009, 58, 259–272. [Google Scholar] [CrossRef]
- Arrieta, A.F.; Bilgen, O.; Friswell, M.I.; Ermanni, P. Modelling and configuration control of wing-shaped bistable piezoelectric composites under aerodynamic loads. Aerosp. Sci. Technol. 2013, 29, 453–461. [Google Scholar] [CrossRef] [Green Version]
- Bilgen, O.; Arrieta, A.F.; Friswell, M.I.; Hagedorn, P. Dynamic control of a bistable wing under aerodynamic loading. Smart Mater. Struct. 2013, 22, 025020. [Google Scholar] [CrossRef] [Green Version]
- Arrieta, A.F.; Neild, S.A.; Wagg, D.J. On the Cross-Well Dynamics of a Bistable Composite Plate. J. Sound Vib. 2011, 330, 3424–3441. [Google Scholar] [CrossRef]
- Diaconu, C.G.; Weaver, P.M.; Arrieta, A.F. Dynamic analysis of bistable composite plates. J. Sound Vib. 2009, 22, 987–1004. [Google Scholar] [CrossRef]
- Taki, M.S.; Tikani, R.; Ziaei-Rad, S.; Firouzian-Nejad, A. Dynamic responses of cross-ply bistable composite laminates with piezoelectric layers. Arch. Appl. Mech. 2016, 86, 1003–1018. [Google Scholar] [CrossRef]
- Zhang, W.; Liu, Y.Z.; Wu, M.Q. Theory and experiment of nonlinear vibrations and dynamic snap-through phenomena for bistable asymmetric laminated composite square panels under foundation excitation. Compos. Struct. 2019, 225, 111140. [Google Scholar] [CrossRef]
- Jiang, G.Q.; Dong, T.; Guo, Z.K. Nonlinear dynamics of an unsymmetric cross-ply square composite laminated plate for vibration energy harvesting. Symmetry 2021, 13, 1261. [Google Scholar] [CrossRef]
- Emam, S.A.; Inman, D.J. A review on bistable composite laminates for morphing and energy harvesting. Appl. Mech. Rev. 2015, 67, 060803. [Google Scholar] [CrossRef]
- Pellegrini, S.P.; Tolou, N.; Schenk, M.; Herder, J.L. Bistable Vibration Energy Harvesters: A Review. J. Intell. Mater. Syst. Struct. 2013, 24, 1303–1312. [Google Scholar] [CrossRef]
- Bowen, C.R.; Butler, R.; Jervis, V.; Kim, H.A.; Salo, A.I.T. Morphing and shape control using unsymmetrical composites. J. Intell. Mater. Syst. Struct. 2007, 18, 89–98. [Google Scholar] [CrossRef]
- Shaw, A.D.; Neild, S.A.; Wagg, D.J.; Weaver, P.M.; Carrella, A. A nonlinear spring mechanism incorporating a bistable composite plate for vibration isolation. J. Sound Vib. 2013, 332, 6265–6275. [Google Scholar] [CrossRef] [Green Version]
- Reddy, A.N. Mechanics of Laminated Composite Plates and Shells: Theory and Analysis; CRC Press: Boca Raton, FL, USA, 2004; pp. 200–216. [Google Scholar]
- Arrieta, A.F.; Spelsberg-Korspeter, G.; Hagedorn, P.; Neild, S.A.; Wagg, D.J. Low-Order Model for the Dynamics of Bistable Composite Plates. Int. J. Solids Struct. 2011, 22, 2025–2043. [Google Scholar]
- Lee, Y.H.; Bae, S.I.; Kim, J.H. Thermal buckling behavior of functionally graded plates based on neutral surface. Compos. Struct. 2016, 137, 208–214. [Google Scholar] [CrossRef]
- Emam, S.A.; Hobeck, J.; Inman, D.J. Experimental investigation into the nonlinear dynamics of a bistable laminate. Nonlinear Dyn. 2019, 95, 3019–3039. [Google Scholar] [CrossRef]
- Hoa, S.V. Factors affecting the properties of composites made by 4D printing: Moldless composites manufacturing. Adv. Manuf. Polym. Compos. Sci. 2017, 3, 101–109. [Google Scholar] [CrossRef] [Green Version]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Data |
|---|---|
| E11[GPa] | 146.95 |
| E22[GPa] | 10.702 |
| G12[GPa] | 6.977 |
| G13[GPa] | 6.977 |
| G23[GPa] | 6.977 |
| ν12 | 0.3 |
| α1[°C]−1 | 5.028 × 10−7 |
| α2[°C]−1 | 2.65 × 10−5 |
| h[mm] | 0.122 |
| Lx[mm] | 300 |
| Ly[mm] | 300 |
| Ru(x) | Rv(x) | Rw(x) | Ru(y) | Rv(y) | Rw(y) | |
|---|---|---|---|---|---|---|
| FFFF | 1 | 1 | 1 | 1 | 1 | 1 |
| FSFF | 1 | 1 − x | 1 − x | 1 − y | 1 | 1 − y |
| SFFF | 1 | 1 + x | 1 + x | 1 + y | 1 | 1 + y |
| SSFF | 1 | 1 − x2 | 1 − x2 | 1 − y2 | 1 | 1 − y2 |
| FCFF | 1 − x | 1 − x | 1 − x | 1 − y | 1 − y | 1 − y |
| CFFF | 1 + x | 1 + x | 1 + x | 1 + y | 1 + y | 1 + y |
| SCFF | 1 − x | 1 − x2 | 1 − x2 | 1 − y2 | 1 − y | 1 − y2 |
| CSFF | 1 + x | 1 − x2 | 1 − x2 | 1 − y2 | 1 + y | 1 − y2 |
| CCFF | 1 − x2 | 1 − x2 | 1 − x2 | 1 − y2 | 1 − y2 | 1 − y2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, T.; Guo, Z.; Jiang, G. Global and Local Dynamics of a Bistable Asymmetric Composite Laminated Shell. Symmetry 2021, 13, 1690. https://doi.org/10.3390/sym13091690
Dong T, Guo Z, Jiang G. Global and Local Dynamics of a Bistable Asymmetric Composite Laminated Shell. Symmetry. 2021; 13(9):1690. https://doi.org/10.3390/sym13091690
Chicago/Turabian StyleDong, Ting, Zhenkun Guo, and Guoqing Jiang. 2021. "Global and Local Dynamics of a Bistable Asymmetric Composite Laminated Shell" Symmetry 13, no. 9: 1690. https://doi.org/10.3390/sym13091690
APA StyleDong, T., Guo, Z., & Jiang, G. (2021). Global and Local Dynamics of a Bistable Asymmetric Composite Laminated Shell. Symmetry, 13(9), 1690. https://doi.org/10.3390/sym13091690