
Salt and Pepper Noise Removal Method Based on a Detail-Aware Filter

Abstract
1. Introduction
- (1)
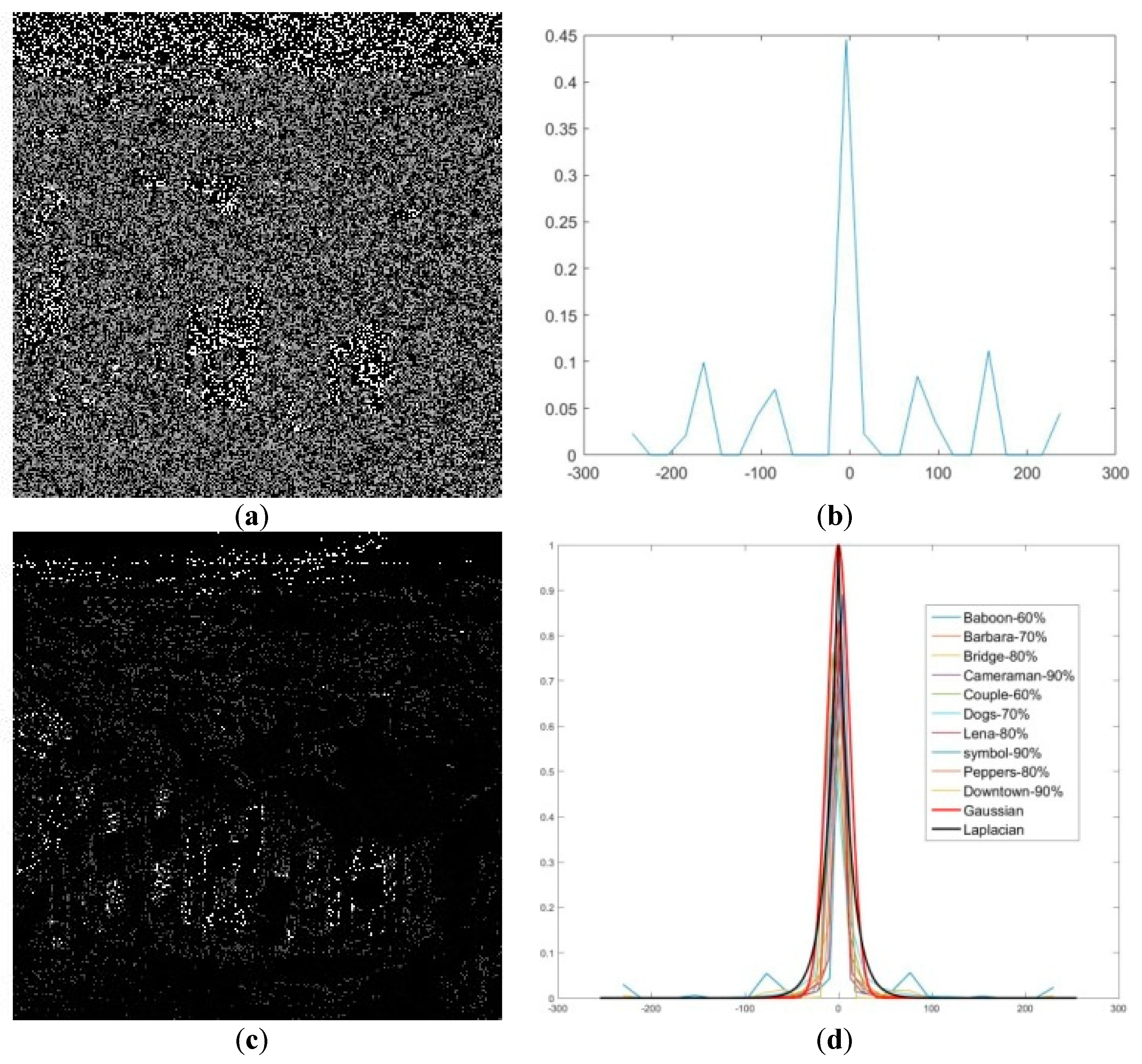
- By analyzing the error of the median-type filter statistically, it is found that the error is almost a Gaussian–Laplacian mixture distribution. Therefore, a two-step noise removal method is designed to remove the SAP noise.
- (2)
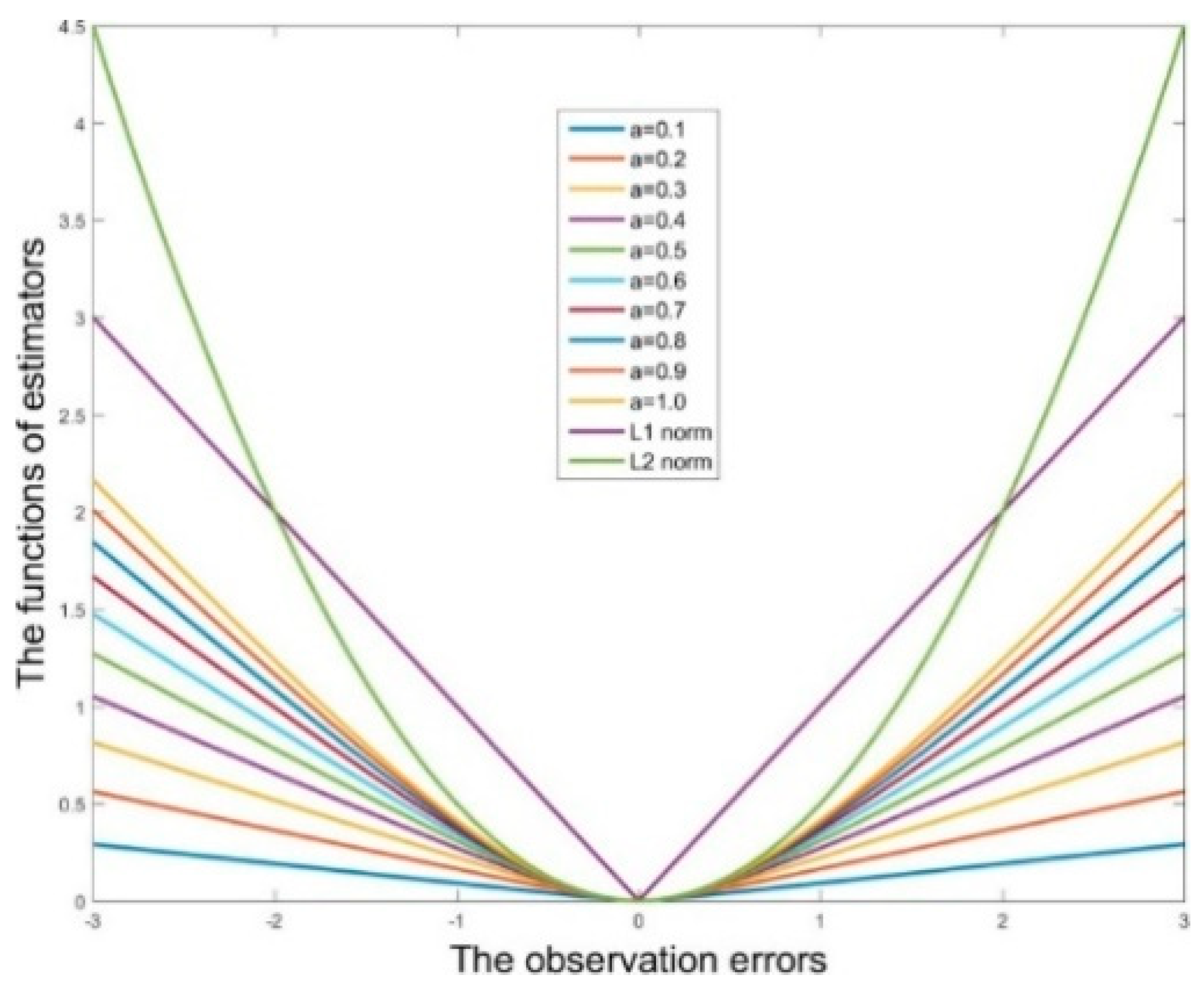
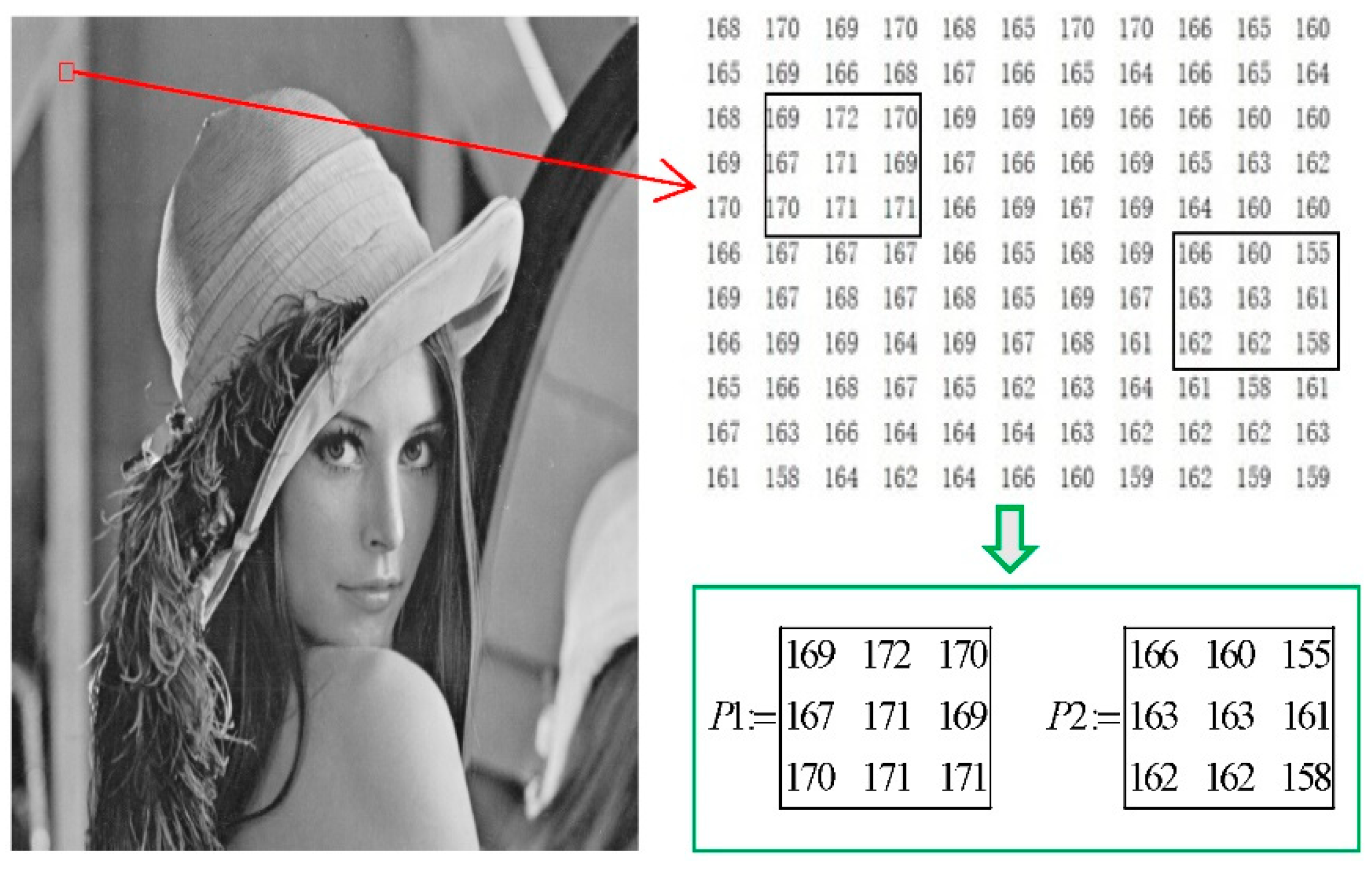
- A novel adaptive non-local bilateral filter is proposed to recover the median-type filtered result. Owing to the drawbacks of traditional bilateral filter, a nonlocal operator is used to extract image patches, and the adaptive norm is used to measure the spatial proximity and intensity similarity between the patches.
- (3)
- We propose a method to calculate the scale parameters in the adaptive norm. Using this strategy, the context information can be utilized to make the norm adapt to the patch feature.
2. Related Work
2.1. Switching Filters
2.2. Decision Filters
2.3. Fuzzy Filters
2.4. Morphological Filters
2.5. Cascade Filters
2.6. Nonlocal Means Filter and Bilateral Filter for SAP Noise Removal
3. Error Analysis and Bilateral Filter
3.1. Error Analysis
3.2. Bilateral Filter
4. Proposed Two-Step Algorithm
4.1. NAFSMF for Preprocessing
4.2. ANB Filter to Improve Result
4.3. Proposed Two-Stage Noise Removal Algorithm
| Algorithm 1: Proposed two-stage noise removal algorithm |
| Input: noisy image I, α, β; |
| First stage |
| 1. Obtain M using Equation (9); |
| 2. Obtain and ; Do until ; |
| 3. Calculate ; |
| 4. Calculate using Equations (14) and (15); |
| Second stage |
| 5. Calculate the spatial proximity using |
| 6. Calculate the scale parameters using |
| 7. Calculate the intensity similarity using |
| 8. Obtain the de-noised result |
| Output: de-noised image x |
5. Efficiency Analysis
5.1. Weight Analysis
5.2. Norm Choice
6. Experimental Results and Discussion
6.1. Comparison under Different Norm Choice
6.2. Comparisons between Pre- and Post-Processed Images
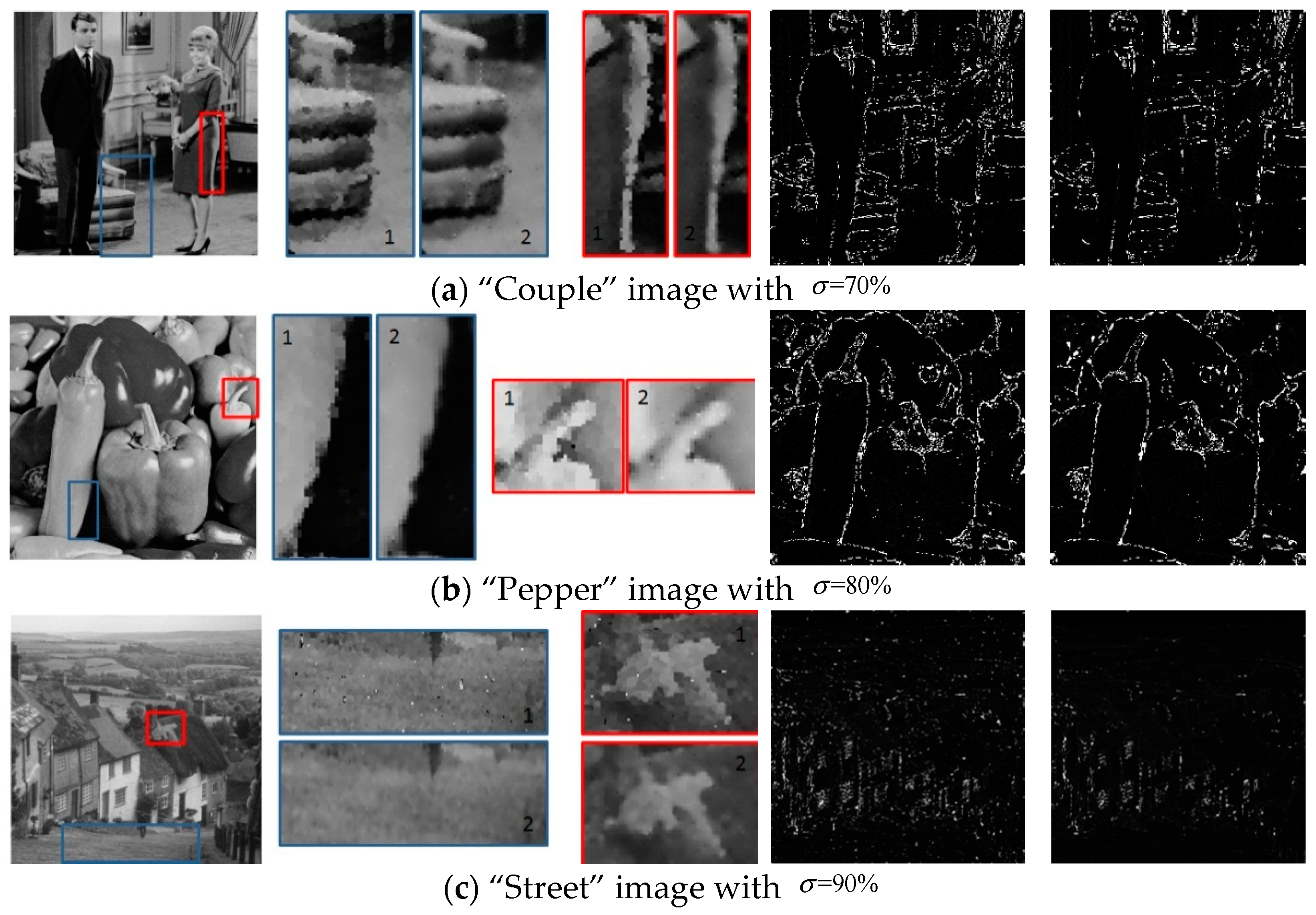
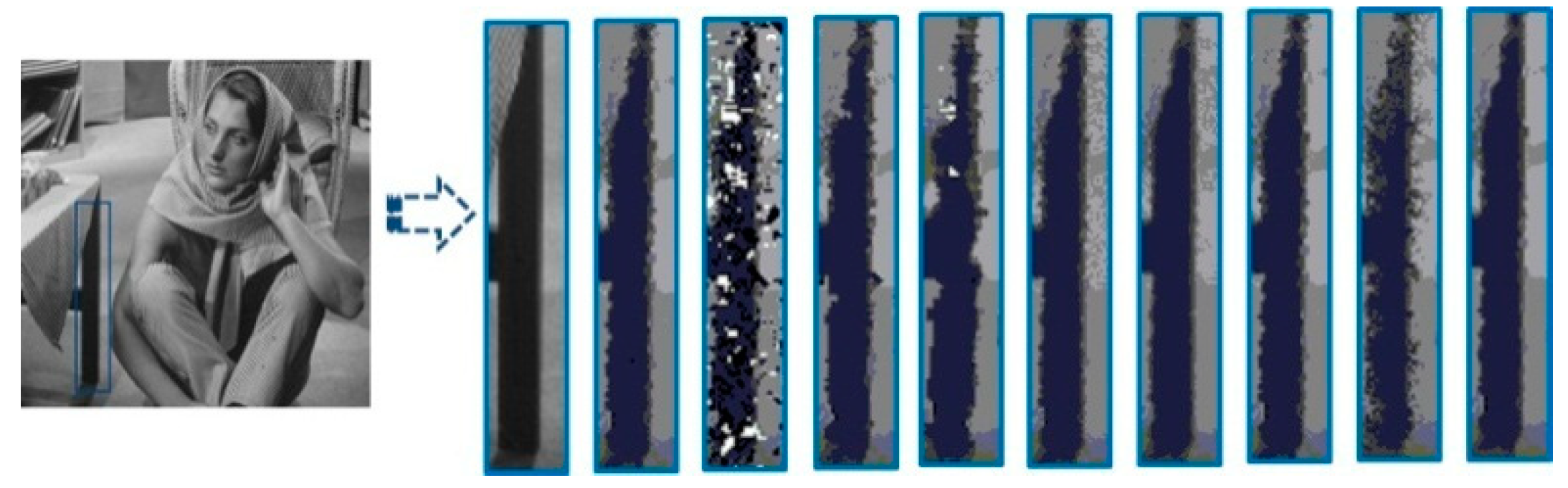
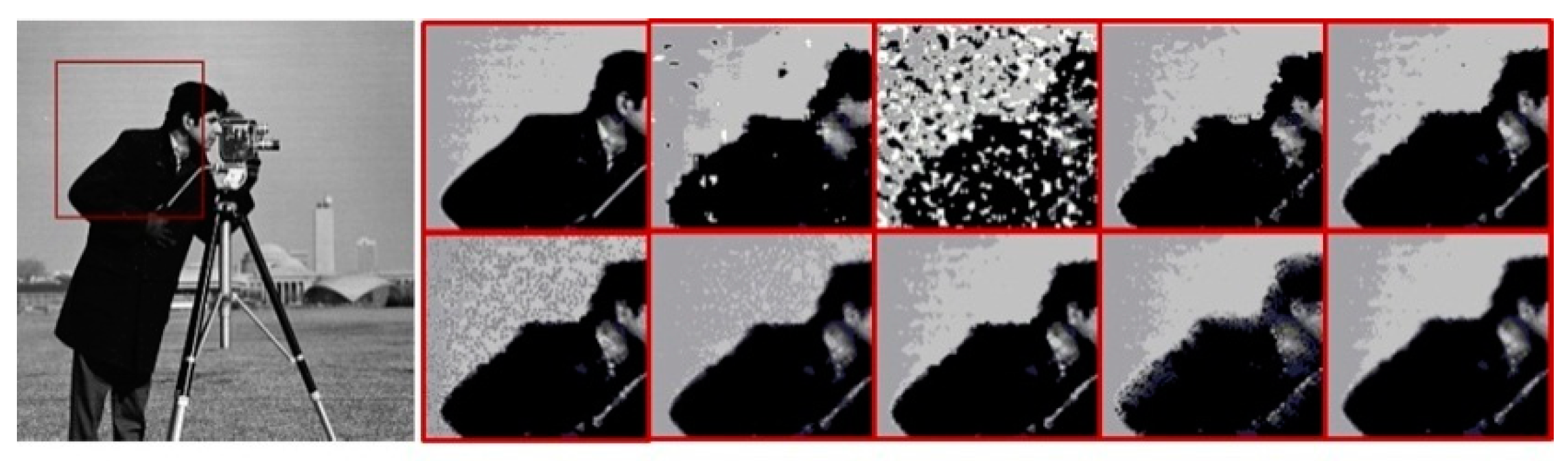
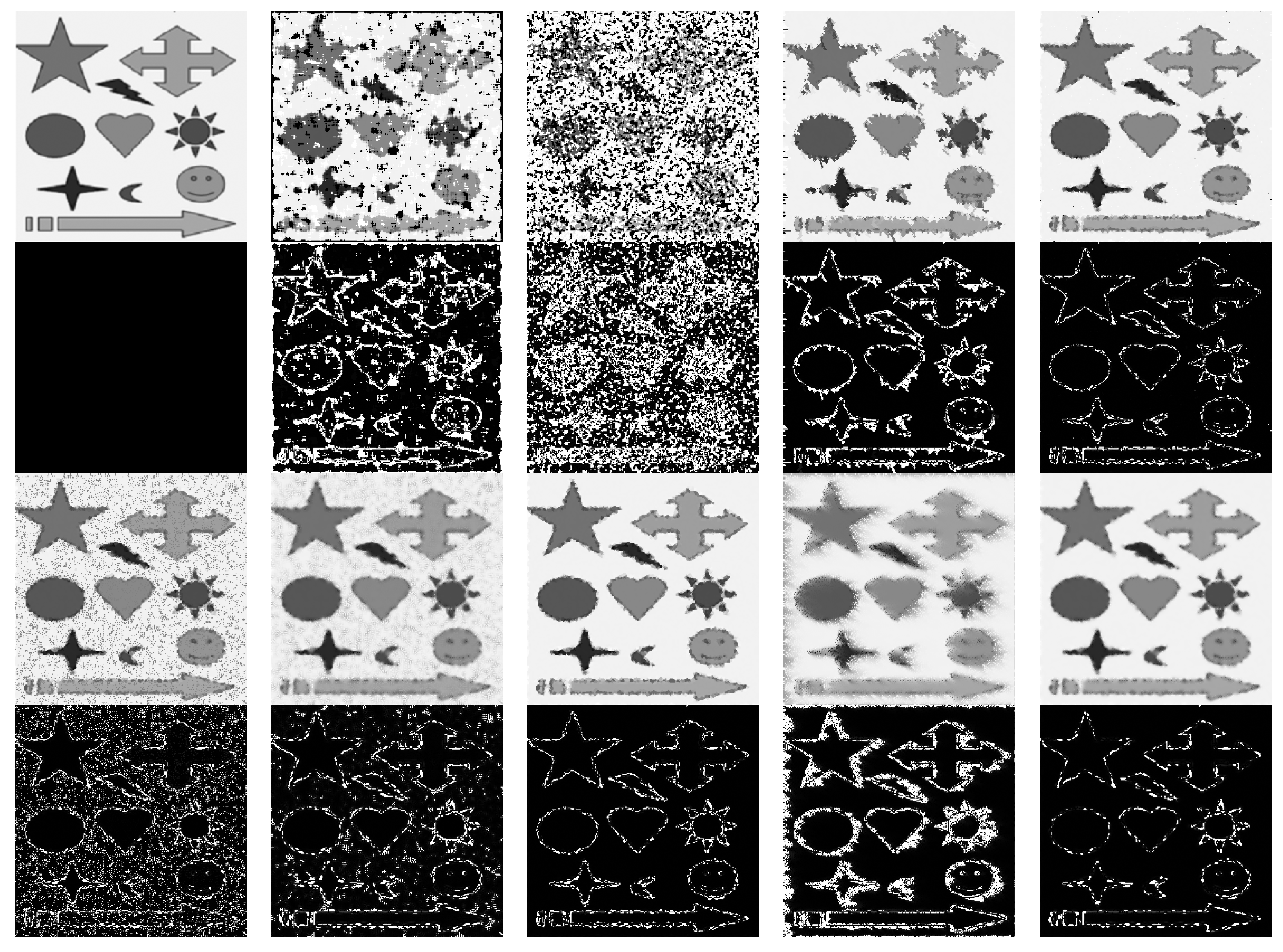
6.3. Subjective Quality Analysis
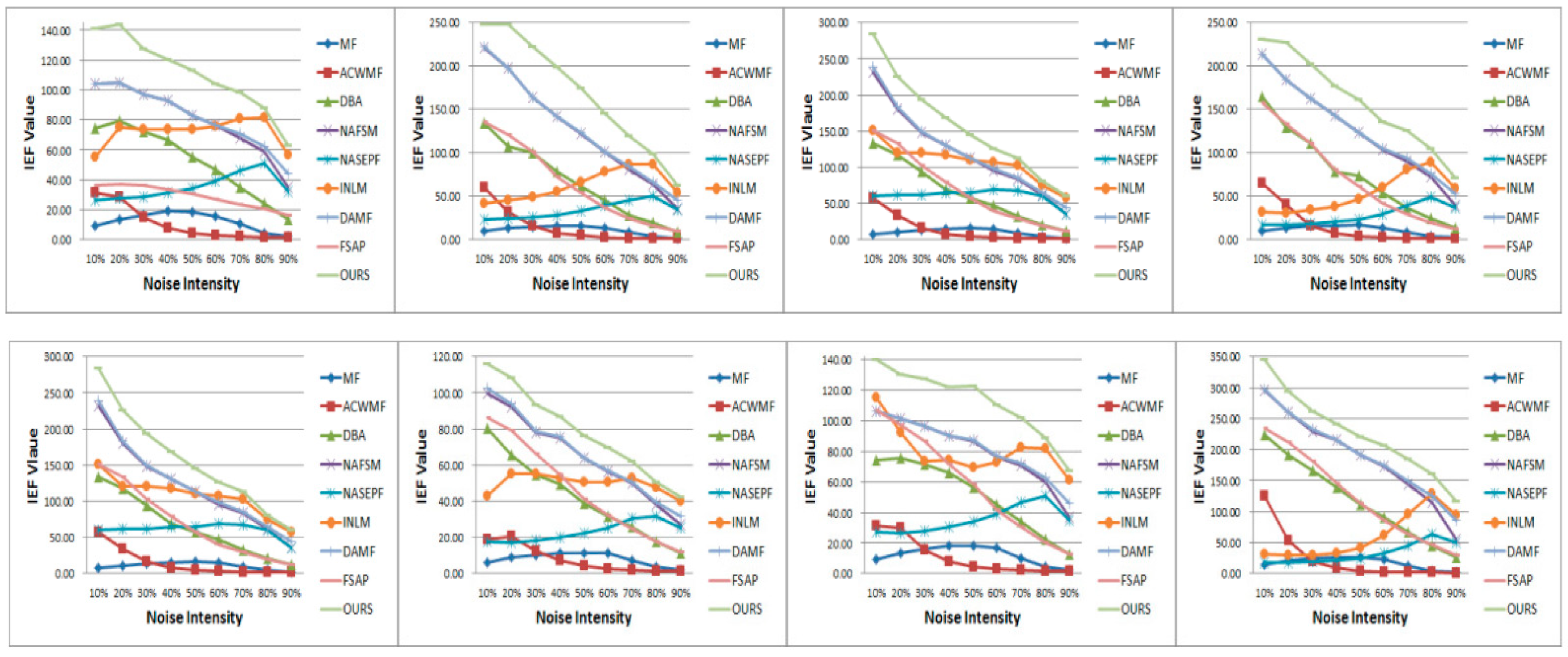
6.4. Objective Quality Analysis
6.5. Effect of Searching Window
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Conflicts of Interest
References
- Yuan, G.; Ghanem, B. TV: A Sparse Optimization Method for Impulse Noise Image Restoration. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 41, 352–364. [Google Scholar] [CrossRef]
- Jin, L.; Zhu, Z.; Song, E.; Xu, X. An Effective Vector Filter for Impulse Noise Reduction Based on Adaptive Quaternion Color Distance Mechanism. Signal Process. 2019, 155, 334–345. [Google Scholar] [CrossRef]
- Veerakumar, T.; Subudhi, B.N.; Esakkirajan, S.; Pradhan, P.K. Iterative Adaptive Unsymmetric Trimmed Shock Filter for High-density Salt-and-pepper Noise Removal. Circuits Syst. Signal Process. 2019, 38, 2630–2652. [Google Scholar] [CrossRef]
- Fu, B.; Zhao, X.; Song, C.; Li, X.; Wang, X. A Salt and Pepper Noise Image Denoising Method Based on the Generative Classification. Multimed. Tools Appl. 2019, 78, 12043–12053. [Google Scholar] [CrossRef]
- Chen, F.; Huang, M.; Ma, Z.; Li, Y.; Huang, Q. An Iterative Weighted-Mean Filter for Removal of High-Density Salt-and-Pepper Noise. Symmetry 2020, 12, 1990. [Google Scholar] [CrossRef]
- Zeng, X.; Yang, L. A Robust Multiframe Super-resolution Algorithm Based on Half-quadratic Estimation with Modified BTV Regularization. Digit. Signal Process. Rev. J. 2013, 23, 98–109. [Google Scholar] [CrossRef]
- Zhang, X.-M.; Kang, Q.; Cheng, J.-F.; Wang, X. Adaptive Four-dot Median Filter for Removing 1–99% Densities of Salt and-pepper Noise in Images. J. Inf. Technol. Res. 2018, 11, 47–61. [Google Scholar] [CrossRef]
- Rhee, K.H. Improvement Feature Vector: Autoregressive Model of Median Filter Error. IEEE Access 2019, 7, 77524–77540. [Google Scholar] [CrossRef]
- Storath, M.; Weinmann, A. Fast Median Filtering for Phase or Orientation Data. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 639–652. [Google Scholar] [CrossRef]
- Gao, H.; Hu, M.; Gao, T.; Cheng, R. Robust Detection of Median Filtering Based on Combined Features of Difference Image. Signal Process. Image Commun. 2019, 72, 126–133. [Google Scholar] [CrossRef]
- Zhang, Z.; Han, D.; Dezert, J.; Yang, Y. A New Adaptive Switching Median Filter for Impulse Noise Reduction with Pre-detection Based on Evidential Reasoning. Signal Process. 2018, 147, 173–189. [Google Scholar] [CrossRef]
- Zhu, Z.; Jin, L.; Song, E.; Hung, C.-C. Quaternion Switching Vector Median Filter Based on Local Reachability Density. IEEE Signal Process. Lett. 2018, 25, 843–847. [Google Scholar] [CrossRef]
- Chanu, P.R.; Singh, K.M. A Two-stage Switching Vector Median Filter Based on Quaternion for Removing Impulse Noise in Color Images. Multimed. Tools Appl. 2019, 78, 15375–15401. [Google Scholar] [CrossRef]
- Sanaee, P.; Moallem, P.; Razzazi, F. An Interpolation Filter Based on Natural Neighbor Galerkin Method for Salt and Pepper Noise Restoration with Adaptive Size Local Filtering Window. Signal Image Video Process. 2019, 13, 895–903. [Google Scholar] [CrossRef]
- Varatharajan, R.; Vasanth, K.; Gunasekaran, M.; Priyan, M.; Gao, X.Z. An Adaptive Decision Based Kriging Interpolation Algorithm for the Removal of High Density Salt and Pepper Noise in Images. Comput. Electr. Eng. 2018, 70, 447–461. [Google Scholar] [CrossRef]
- Toh, K.K.V.; Isa, N.A.M. Noise Adaptive Fuzzy Switching Median Filter for Salt-and-pepper Noise Reduction. IEEE Signal Process. Lett. 2010, 17, 281–284. [Google Scholar] [CrossRef]
- Ibrahim, H.; Kong, N.S.P.; Foo, T.F. Simple Adaptive Median Filter for the Removal of Impulse Noise from Highly Corrupted Images. IEEE Trans. Consum. Electron. 2008, 54, 1920–1927. [Google Scholar] [CrossRef]
- Toh, K.K.V.; Ibrahim, H.; Mahyuddin, M.N. Salt-and-pepper Noise Detection and Reduction Using Fuzzy Switching Median Filter. IEEE Trans. Consum. Electron. 2008, 54, 1956–1961. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, J.; Song, X.; Han, L. An Efficient Adaptive Fuzzy Switching Weighted Mean Filter for Salt-and-pepper Noise Removal. IEEE Signal Process. Lett. 2016, 23, 1582–1586. [Google Scholar] [CrossRef]
- Kumar, S.V.; Nagaraju, C. T2FCS Filter: Type 2 Fuzzy and Cuckoo Search-based Filter Design for Image Restoration. J. Vis. Commun. Image Represent. 2019, 58, 619–641. [Google Scholar] [CrossRef]
- González-Hidalgo, M.; Massanet, S.; Mir, A.; Ruiz-Aguilera, D. Improving Salt and Pepper Noise Removal Using a Fuzzy Mathematical Morphology-based Filter. Appl. Soft Comput. J. 2018, 63, 167–180. [Google Scholar] [CrossRef]
- Khosravy, M.; Gupta, N.; Marina, N.; Sethi, I.K.; Asharif, M.R. Morphological Filters: An Inspiration from Natural Geometrical Erosion and Dilation. In Nature Inspired Compututer Optimization; Springer: Cham, Switzerland, 2017; pp. 349–379. [Google Scholar]
- Sedaaghi, M.H.; Daj, R.; Khosravi, M. Mediated Morphological Filters. In Proceedings of the 2001 International Conference on Image Processing, Thessaloniki, Greece, 7–10 October 2001; 2001; pp. 692–695. [Google Scholar]
- Khosravi, M.; Sedaaghi, M.H. Impulsive Noise Suppression of Electrocardiogram Signals with Mediated Morphological Filters. In Proceedings of the 11th Iranian Conference on Biomedical Engineering, Teheran, Iran, 18 February 2004. [Google Scholar]
- Khosravy, M.; Asharif, M.R.; Sedaaghi, M.H. Morphological Adult and Fetal ECG Preprocessing: Employing Mediated Morphology. IEICE Med. Imaging 2007, 107, 363–369. [Google Scholar]
- Khosravy, M.; Asharif, M.R.; Sedaaghi, M.H. Medical Image Noise Suppression: Using Mediated Morphology. IEICE Tech. Rep. 2008, 107, 265–270. [Google Scholar]
- Mafi, M.; Rajaei, H.; Cabrerizo, M.; Malek, A. A Robust Edge Detection Approach in the Presence of High Impulse Noise Intensity through Switching Adaptive Median and Fixed Weighted Mean Filtering. IEEE Trans. Image Process. 2018, 27, 5475–5490. [Google Scholar] [CrossRef]
- Balasubramanian, S.; Kalishwaran, S.; Muthuraj, R.; Ebenezer, D.; Jayaraj, V. An Efficient Non-linear Cascade Filtering Algorithm for Removal of High Density Salt and Pepper Noise in Image and Video Sequence. In Proceedings of the IEEE International Conference Control, Automation, Communication and Energy Conservation (INCACEC), Perundurai, Erode, India, 4–6 June 2009; pp. 1–6. [Google Scholar]
- Raza, M.T.; Sawant, S. High Density Salt and Pepper Noise Removal through Decision Based Partial Trimmed Global Mean Filter. In Proceedings of the IEEE International Conference Engineering (NUiCONE), Ahmedabad, Gujarat, India, 6–8 December 2012; pp. 1–5. [Google Scholar]
- Esakkirajan, S.; Veerakumar, T.; Subramanyam, A.N.; Chand, C.H.P. Removal of High Density Salt and Pepper Noise through Modified Decision Based Unsymmetrical Trimmed Median Filter. IEEE Signal Process. Lett. 2011, 18, 287–290. [Google Scholar] [CrossRef]
- Wang, X.; Shen, S.; Shi, G.; Xu, Y.; Zhang, P. Iterative Non-local Means Filter for Salt and Pepper Noise Removal. J. Vis. Commun. Image Represent. 2016, 38, 440–450. [Google Scholar] [CrossRef]
- Veerakumar, T.; Subudhi, B.N.; Esakkirajan, S. Empirical Mode Decomposition and Adaptive Bilateral Filter Approach for Impulse Noise Removal. Expert Syst. Appl. 2019, 121, 18–27. [Google Scholar] [CrossRef]
- Mafi, M.; Martin, H.; Cabrerizo, M.; Andrian, J.; Barreto, A.; Adjouadi, M. A Comprehensive Survey on Impulse and Gaussian Denoising Filters for Digital Images. Signal Process. 2019, 157, 236–260. [Google Scholar] [CrossRef]
- Nair, P.; Chaudhury, K.N. Fast High-dimensional Bilateral and Nonlocal Means Filtering. IEEE Trans. Image Process. 2019, 28, 1470–1481. [Google Scholar] [CrossRef] [PubMed]
- Karthikeyan, P.; Vasuki, S. Efficient Decision Based Algorithm for the Removal of High Density Salt and Pepper Noise in Images. J. Commun. Technol. Electron. 2016, 61, 963–970. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image Quality Assessment: From Error Visibility to Structural Similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]
- Chen, T.; Wu, H.R. Adaptive Impulse Detection Using Center Weighted Median Filters. IEEE Signal Process. Lett. 2001, 8, 1–3. [Google Scholar] [CrossRef]
- Jiang, D.-S.; Li, X.-B.; Wang, Z.-L.; Liu, C. An Efficient Edge-preserving Approach Based on Adaptive Fuzzy Switching Median Filter. In Proceedings of the 2011 International Conference on Quality, Reliability, Risk, Maintenance, and Safety Engineering, Xi’an, China, 17–19 June 2011; pp. 952–955. [Google Scholar]
- Erkan, U.; Gökrem, L.; Enginoğlu, S. Different Applied Median Filter in Salt and Pepper Noise. Comput. Electr. Eng. 2018, 70, 789–798. [Google Scholar] [CrossRef]
- Srinivasan, K.S.; Ebenezer, D. A New Fast and Efficient Decision-based Algorithm for Removal of High-density Impulse Noises. IEEE Signal Process. Lett. 2007, 14, 189–192. [Google Scholar] [CrossRef]
- Singh, V.; Dev, R.; Dhar, N.K.; Agrawal, P.; Verma, N.K. Adaptive Type-2 Fuzzy Approach for Filtering Salt and Pepper Noise in Grayscale Images. IEEE Trans. Fuzzy Syst. 2018, 26, 3170–3176. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image | Method | σ = 10% | σ = 20% | σ = 30% | σ = 40% | σ = 50% | σ = 60% | σ = 70% | σ = 80% | σ = 90% |
|---|---|---|---|---|---|---|---|---|---|---|
| Barbara | OURS | 36.28 | 32.93 | 31.07 | 29.60 | 28.64 | 27.42 | 26.38 | 25.21 | 23.47 |
| L1-based | 36.19 | 32.60 | 30.77 | 29.31 | 28.40 | 27.24 | 26.22 | 24.99 | 23.40 | |
| L2-based | 36.78 | 33.38 | 30.87 | 29.21 | 27.95 | 26.53 | 25.46 | 24.23 | 22.34 | |
| Man-made | OURS | 43.61 | 38.83 | 35.96 | 33.13 | 31.05 | 29.33 | 27.44 | 25.74 | 22.39 |
| L1-based | 42.80 | 38.66 | 35.54 | 32.77 | 31.54 | 29.19 | 26.24 | 24.65 | 22.23 | |
| L2-based | 42.34 | 38.48 | 35.16 | 32.28 | 30.59 | 28.22 | 26.99 | 24.46 | 21.30 |
| Image | Method | σ = 10% | σ = 20% | σ = 30% | σ = 40% | σ = 50% | σ = 60% | σ = 70% | σ = 80% | σ = 90% |
|---|---|---|---|---|---|---|---|---|---|---|
| Barbara | OURS | 0.9837 | 0.9643 | 0.9431 | 0.9179 | 0.8955 | 0.8641 | 0.8250 | 0.7766 | 0.6927 |
| L1-based | 0.9829 | 0.9617 | 0.9392 | 0.9126 | 0.8898 | 0.8579 | 0.8178 | 0.7718 | 0.6901 | |
| L2-based | 0.9863 | 0.9697 | 0.9448 | 0.9180 | 0.8880 | 0.8496 | 0.8079 | 0.7519 | 0.6639 | |
| Man-made | OURS | 0.9982 | 0.9945 | 0.9892 | 0.9795 | 0.9682 | 0.9529 | 0.9298 | 0.9018 | 0.8285 |
| L1-based | 0.9978 | 0.9943 | 0.9886 | 0.9796 | 0.9738 | 0.9560 | 0.9069 | 0.8711 | 0.8113 | |
| L2-based | 0.9980 | 0.9952 | 0.9900 | 0.9820 | 0.9731 | 0.9549 | 0.9411 | 0.9001 | 0.8229 |
| Image | Method | σ = 10% | σ = 20% | σ = 30% | σ = 40% | σ = 50% | σ = 60% | σ = 70% | σ = 80% | σ = 90% |
|---|---|---|---|---|---|---|---|---|---|---|
| Barbara | OURS | 140.416 | 130.547 | 127.952 | 122.382 | 122.607 | 110.510 | 101.752 | 88.895 | 67.242 |
| L1-based | 139.339 | 121.283 | 120.390 | 114.770 | 116.538 | 106.415 | 98.443 | 85.115 | 66.178 | |
| L2-based | 160.801 | 146.468 | 123.910 | 113.409 | 105.971 | 91.0615 | 83.418 | 71.694 | 52.399 | |
| Man-made | OURS | 631.958 | 582.068 | 443.847 | 341.676 | 299.842 | 208.344 | 131.921 | 97.475 | 58.901 |
| L1-based | 753.249 | 562.153 | 421.249 | 295.480 | 281.036 | 192.859 | 113.374 | 89.552 | 57.791 | |
| L2-based | 678.310 | 542.347 | 388.393 | 265.755 | 226.931 | 154.95 | 136.959 | 87.188 | 47.458 |
| Image | Method | σ = 10% | σ = 20% | σ = 30% | σ = 40% | σ = 50% | σ = 60% | σ = 70% | σ = 80% | σ = 90% |
|---|---|---|---|---|---|---|---|---|---|---|
| Couple | Pre-processed | 38.10 | 34.08 | 31.48 | 29.68 | 28.07 | 26.53 | 25.27 | 23.52 | 20.48 |
| Post-processed | 39.10 | 35.29 | 32.73 | 30.86 | 29.21 | 27.79 | 26.64 | 25.06 | 22.86 | |
| Pepper | Pre-processed | 37.54 | 33.87 | 31.50 | 29.61 | 28.05 | 26.44 | 24.78 | 23.14 | 20.14 |
| Post-processed | 37.76 | 35.01 | 32.91 | 31.15 | 29.62 | 28.01 | 26.54 | 25.13 | 22.65 | |
| Street | Pre-rocessed | 39.36 | 35.82 | 33.47 | 31.95 | 30.50 | 29.24 | 27.80 | 26.25 | 22.57 |
| Post-rocessed | 40.24 | 36.40 | 34.07 | 32.48 | 31.14 | 30.08 | 28.90 | 27.76 | 25.84 |
| Image | Method | σ = 10% | σ = 20% | σ = 30% | σ = 40% | σ = 50% | σ = 60% | σ = 70% | σ = 80% | σ = 90% |
|---|---|---|---|---|---|---|---|---|---|---|
| Couple | Pre-processed | 0.9859 | 0.9706 | 0.9500 | 0.9280 | 0.9026 | 0.8662 | 0.8269 | 0.7626 | 0.6148 |
| Post-processed | 0.9893 | 0.9764 | 0.9580 | 0.9368 | 0.9125 | 0.8803 | 0.8476 | 0.7789 | 0.6973 | |
| Pepper | Pre-processed | 0.9871 | 0.9707 | 0.9547 | 0.9300 | 0.9052 | 0.8727 | 0.8310 | 0.7735 | 0.6456 |
| Post-processed | 0.9883 | 0.9749 | 0.9617 | 0.9410 | 0.9221 | 0.8966 | 0.8687 | 0.8300 | 0.7590 | |
| Street | Pre-processed | 0.9871 | 0.9707 | 0.9547 | 0.9300 | 0.9052 | 0.8727 | 0.8310 | 0.7735 | 0.6456 |
| Post-processed | 0.9883 | 0.9749 | 0.9617 | 0.9410 | 0.9221 | 0.8966 | 0.8687 | 0.8300 | 0.7590 |
| Image | Method | σ = 10% | σ = 20% | σ = 30% | σ = 40% | σ = 50% | σ = 60% | σ = 70% | σ = 80% | σ = 90% |
|---|---|---|---|---|---|---|---|---|---|---|
| Couple | Pre-processed | 232.16 | 180.32 | 148.58 | 130.69 | 112.86 | 95.43 | 83.98 | 62.35 | 35.61 |
| Post-processed | 284.77 | 226.29 | 194.08 | 168.83 | 145.19 | 126.20 | 113.82 | 80.40 | 60.58 | |
| Pepper | Pre-processed | 221.37 | 197.51 | 163.91 | 141.82 | 122.67 | 102.06 | 81.17 | 63.20 | 35.82 |
| Post-processed | 248.20 | 248.25 | 222.90 | 199.28 | 174.44 | 145.03 | 120.45 | 98.71 | 63.11 | |
| Street | Pre-processed | 295.41 | 260.04 | 229.59 | 215.14 | 191.47 | 172.26 | 144.31 | 115.03 | 55.76 |
| Post-processed | 345.85 | 293.34 | 261.28 | 241.07 | 220.54 | 207.64 | 184.61 | 161.84 | 117.33 |
| Image | Method | σ = 10% | σ = 20% | σ = 30% | σ = 40% | σ = 50% | σ = 60% | σ = 70% | σ = 80% | σ = 90% |
|---|---|---|---|---|---|---|---|---|---|---|
| Barbara | MF | 24.13 | 22.74 | 21.88 | 21.17 | 20.28 | 19.18 | 16.19 | 11.88 | 7.69 |
| ACWMF | 29.79 | 26.60 | 21.95 | 17.84 | 14.21 | 11.53 | 9.17 | 7.41 | 5.83 | |
| DBA | 33.56 | 30.69 | 28.68 | 27.07 | 25.45 | 23.72 | 21.89 | 19.54 | 16.50 | |
| NAFSM | 34.97 | 31.78 | 29.78 | 28.21 | 27.10 | 25.77 | 24.73 | 23.44 | 20.82 | |
| NASEPF | 29.28 | 26.14 | 24.56 | 23.69 | 23.17 | 22.89 | 22.94 | 22.72 | 20.55 | |
| INLM | 35.41 | 31.47 | 28.70 | 27.48 | 26.23 | 25.67 | 25.51 | 24.86 | 23.07 | |
| DAMF | 34.97 | 31.78 | 29.78 | 28.21 | 27.12 | 25.80 | 24.82 | 23.64 | 21.79 | |
| FSAP | 35.04 | 31.64 | 29.35 | 27.26 | 25.40 | 23.23 | 21.20 | 18.87 | 16.49 | |
| OURS | 36.28 | 32.93 | 31.07 | 29.60 | 28.64 | 27.42 | 26.38 | 25.21 | 23.47 | |
| Baboon | MF | 19.58 | 19.32 | 18.98 | 18.65 | 18.26 | 17.34 | 15.27 | 11.31 | 7.48 |
| ACWMF | 25.76 | 23.45 | 20.16 | 16.81 | 13.75 | 11.14 | 9.02 | 7.24 | 5.80 | |
| DBA | 28.02 | 25.96 | 24.24 | 22.84 | 21.59 | 20.24 | 19.04 | 17.74 | 16.15 | |
| NAFSM | 30.87 | 27.80 | 25.90 | 24.35 | 23.05 | 21.88 | 20.72 | 19.49 | 17.69 | |
| NASEPF | 26.56 | 23.62 | 22.03 | 21.01 | 20.36 | 19.94 | 19.57 | 19.05 | 17.55 | |
| INLM | 28.93 | 26.79 | 25.06 | 23.56 | 22.49 | 21.73 | 21.08 | 20.38 | 19.20 | |
| DAMF | 30.87 | 27.80 | 25.90 | 24.35 | 23.05 | 21.89 | 20.75 | 19.58 | 18.15 | |
| FSAP | 30.35 | 27.45 | 25.60 | 24.03 | 22.62 | 21.37 | 20.13 | 18.97 | 17.49 | |
| OURS | 31.23 | 28.04 | 26.08 | 24.53 | 23.33 | 22.35 | 21.41 | 20.49 | 19.35 | |
| Cameraman | MF | 21.95 | 21.10 | 20.11 | 19.18 | 18.43 | 17.53 | 15.17 | 11.42 | 7.58 |
| ACWMF | 27.76 | 25.24 | 21.31 | 17.63 | 14.38 | 11.60 | 9.55 | 7.59 | 6.09 | |
| DBA | 34.17 | 30.40 | 27.86 | 26.04 | 24.16 | 22.44 | 20.97 | 18.74 | 16.34 | |
| NAFSM | 35.01 | 31.73 | 29.24 | 27.69 | 26.12 | 24.75 | 23.59 | 21.82 | 19.73 | |
| NASEPF | 27.70 | 24.69 | 23.11 | 22.16 | 21.68 | 21.43 | 21.56 | 21.01 | 19.48 | |
| INLM | 31.51 | 29.66 | 27.85 | 26.31 | 25.23 | 24.42 | 23.94 | 22.86 | 21.54 | |
| DAMF | 35.13 | 31.80 | 29.27 | 27.71 | 26.13 | 24.78 | 23.67 | 21.94 | 20.46 | |
| FSAP | 34.42 | 31.14 | 28.58 | 26.35 | 24.25 | 22.45 | 20.69 | 18.67 | 16.43 | |
| OURS | 37.71 | 32.62 | 30.07 | 28.49 | 26.93 | 25.74 | 24.62 | 23.09 | 21.78 | |
| Couple | MF | 22.79 | 21.75 | 21.06 | 20.24 | 19.66 | 18.45 | 15.48 | 11.52 | 7.56 |
| ACWMF | 32.10 | 26.98 | 22.15 | 17.65 | 14.20 | 11.29 | 8.90 | 7.15 | 5.69 | |
| DBA | 35.84 | 32.34 | 29.68 | 27.11 | 25.38 | 23.64 | 21.34 | 19.22 | 16.13 | |
| NAFSM | 38.10 | 34.08 | 31.48 | 29.68 | 28.07 | 26.53 | 25.27 | 23.52 | 20.48 | |
| NASEPF | 32.34 | 29.45 | 27.73 | 26.65 | 25.73 | 25.18 | 24.40 | 23.41 | 20.49 | |
| INLM | 36.28 | 32.37 | 30.62 | 29.29 | 28.02 | 27.07 | 26.18 | 24.41 | 22.66 | |
| DAMF | 38.22 | 34.14 | 31.51 | 29.70 | 28.09 | 26.65 | 25.32 | 23.81 | 21.49 | |
| FSAP | 36.27 | 32.80 | 29.92 | 27.53 | 25.19 | 22.80 | 20.86 | 18.59 | 15.87 | |
| OURS | 39.10 | 35.29 | 32.73 | 30.86 | 29.21 | 27.79 | 26.64 | 25.06 | 22.86 | |
| Lena | MF | 25.00 | 23.39 | 22.32 | 21.15 | 20.49 | 18.81 | 16.26 | 12.11 | 8.20 |
| ACWMF | 33.45 | 28.29 | 22.53 | 18.26 | 14.79 | 11.94 | 9.68 | 7.76 | 6.35 | |
| DBA | 37.54 | 33.34 | 30.96 | 28.24 | 27.02 | 24.89 | 22.64 | 20.33 | 17.48 | |
| NAFSM | 38.54 | 34.73 | 32.46 | 30.66 | 29.10 | 27.56 | 26.31 | 24.71 | 21.55 | |
| NASEPF | 27.99 | 24.84 | 23.40 | 22.47 | 22.13 | 22.17 | 22.72 | 23.03 | 21.25 | |
| INLM | 30.43 | 27.24 | 25.85 | 25.09 | 25.07 | 25.30 | 25.90 | 25.68 | 23.39 | |
| DAMF | 38.54 | 34.73 | 32.46 | 30.66 | 29.11 | 27.58 | 26.46 | 24.95 | 22.82 | |
| FSAP | 37.25 | 33.37 | 30.84 | 28.23 | 26.08 | 23.62 | 21.62 | 19.27 | 17.00 | |
| OURS | 39.25 | 35.73 | 33.46 | 31.63 | 30.30 | 28.76 | 27.77 | 26.36 | 24.15 | |
| Peppers | MF | 23.86 | 22.26 | 21.08 | 19.92 | 19.18 | 17.84 | 14.80 | 10.95 | 6.90 |
| ACWMF | 31.92 | 26.11 | 21.58 | 16.91 | 13.93 | 10.87 | 8.56 | 6.80 | 5.32 | |
| DBA | 35.49 | 31.38 | 29.51 | 27.21 | 25.25 | 23.15 | 20.54 | 18.52 | 14.67 | |
| NAFSM | 37.54 | 33.87 | 31.50 | 29.61 | 28.05 | 26.44 | 24.78 | 23.14 | 20.14 | |
| NASEPF | 28.10 | 25.12 | 23.73 | 22.75 | 22.42 | 22.32 | 22.29 | 22.19 | 19.96 | |
| INLM | 30.49 | 27.67 | 26.42 | 25.66 | 25.49 | 25.38 | 25.14 | 24.59 | 21.97 | |
| DAMF | 37.55 | 33.89 | 31.51 | 29.62 | 28.07 | 26.45 | 24.93 | 23.36 | 21.17 | |
| FSAP | 35.43 | 31.79 | 29.47 | 26.77 | 24.52 | 22.19 | 19.68 | 17.31 | 14.79 | |
| OURS | 37.76 | 35.01 | 32.91 | 31.15 | 29.62 | 28.01 | 26.54 | 25.13 | 22.65 | |
| Street | MF | 26.12 | 24.94 | 23.64 | 22.73 | 21.88 | 20.45 | 17.01 | 12.06 | 7.60 |
| ACWMF | 35.74 | 29.04 | 22.77 | 18.02 | 14.43 | 11.46 | 9.19 | 7.36 | 5.82 | |
| DBA | 38.26 | 34.61 | 32.19 | 30.20 | 28.33 | 26.62 | 24.64 | 22.34 | 19.47 | |
| NAFSM | 39.36 | 35.82 | 33.47 | 31.95 | 30.50 | 29.24 | 27.80 | 26.25 | 22.57 | |
| NASEPF | 27.34 | 24.42 | 22.88 | 22.11 | 21.84 | 22.12 | 22.86 | 23.74 | 22.13 | |
| INLM | 29.67 | 26.62 | 24.88 | 24.08 | 23.98 | 24.89 | 26.12 | 26.82 | 24.88 | |
| DAMF | 39.38 | 35.83 | 33.51 | 31.96 | 30.51 | 29.29 | 27.93 | 26.58 | 24.42 | |
| FSAP | 38.36 | 34.95 | 32.47 | 30.27 | 28.23 | 26.29 | 24.32 | 22.36 | 19.87 | |
| OURS | 40.24 | 36.40 | 34.07 | 32.48 | 31.14 | 30.08 | 28.90 | 27.76 | 25.84 | |
| Man-made | MF | 23.59 | 20.57 | 18.51 | 17.21 | 16.30 | 15.02 | 13.10 | 10.19 | 6.47 |
| ACWMF | 33.04 | 26.93 | 21.64 | 17.32 | 13.91 | 10.74 | 8.63 | 6.81 | 5.22 | |
| DBA | 37.81 | 33.02 | 30.40 | 27.43 | 24.65 | 22.75 | 20.09 | 17.59 | 14.38 | |
| NAFSM | 39.29 | 35.26 | 32.83 | 30.54 | 28.89 | 27.35 | 25.40 | 23.69 | 19.63 | |
| NASEPF | 18.69 | 15.76 | 14.24 | 13.47 | 13.35 | 13.83 | 15.01 | 16.77 | 17.98 | |
| INLM | 21.43 | 18.27 | 17.10 | 16.99 | 17.63 | 18.83 | 20.82 | 22.60 | 21.48 | |
| DAMF | 40.74 | 35.91 | 33.19 | 30.72 | 28.98 | 27.44 | 25.44 | 23.95 | 20.72 | |
| FSAP | 37.35 | 33.26 | 30.59 | 27.86 | 24.98 | 23.11 | 20.56 | 18.13 | 15.41 | |
| OURS | 43.61 | 38.83 | 35.96 | 33.13 | 31.05 | 29.33 | 27.44 | 25.74 | 22.39 |
| Image | Method | σ = 10% | σ = 20% | σ = 30% | σ = 40% | σ = 50% | σ = 60% | σ = 70% | σ = 80% | σ = 90% |
|---|---|---|---|---|---|---|---|---|---|---|
| Barbara | MF | 0.7048 | 0.6969 | 0.6852 | 0.6749 | 0.6471 | 0.6084 | 0.4466 | 0.2035 | 0.0466 |
| ACWMF | 0.9494 | 0.8918 | 0.7373 | 0.5042 | 0.2947 | 0.1513 | 0.0785 | 0.0377 | 0.0155 | |
| DBA | 0.9769 | 0.9507 | 0.9174 | 0.8797 | 0.8319 | 0.7729 | 0.6864 | 0.5678 | 0.3945 | |
| NAFSM | 0.9790 | 0.9562 | 0.9288 | 0.8978 | 0.8659 | 0.8243 | 0.7781 | 0.7144 | 0.5882 | |
| NASEPF | 0.8877 | 0.8280 | 0.7883 | 0.7539 | 0.7224 | 0.6946 | 0.6665 | 0.6379 | 0.5625 | |
| INLM | 0.9701 | 0.9319 | 0.8837 | 0.8508 | 0.8184 | 0.7969 | 0.7794 | 0.7523 | 0.6743 | |
| DAMF | 0.9790 | 0.9562 | 0.9288 | 0.8978 | 0.8662 | 0.8251 | 0.7809 | 0.7207 | 0.6285 | |
| FSAP | 0.9798 | 0.9578 | 0.9265 | 0.8836 | 0.8289 | 0.7484 | 0.6433 | 0.5007 | 0.3509 | |
| OURS | 0.9834 | 0.9641 | 0.9427 | 0.9174 | 0.8949 | 0.8633 | 0.8242 | 0.7757 | 0.6898 | |
| Baboon | MF | 0.3842 | 0.3813 | 0.3777 | 0.3726 | 0.3630 | 0.3336 | 0.2545 | 0.1092 | 0.0253 |
| ACWMF | 0.9189 | 0.8578 | 0.7191 | 0.5211 | 0.3162 | 0.1706 | 0.0857 | 0.0412 | 0.0188 | |
| DBA | 0.9673 | 0.9287 | 0.8802 | 0.8234 | 0.7536 | 0.6681 | 0.5676 | 0.4500 | 0.3101 | |
| NAFSM | 0.9704 | 0.9373 | 0.8989 | 0.8557 | 0.8031 | 0.7428 | 0.6688 | 0.5745 | 0.4240 | |
| NASEPF | 0.8633 | 0.7904 | 0.7342 | 0.6867 | 0.6388 | 0.5933 | 0.5462 | 0.4939 | 0.3964 | |
| INLM | 0.9141 | 0.8785 | 0.8306 | 0.7759 | 0.7224 | 0.6733 | 0.6225 | 0.5618 | 0.4605 | |
| DAMF | 0.9704 | 0.9373 | 0.8989 | 0.8557 | 0.8032 | 0.7432 | 0.6700 | 0.5789 | 0.4463 | |
| FSAP | 0.9683 | 0.9345 | 0.8929 | 0.8407 | 0.7700 | 0.6868 | 0.5809 | 0.4632 | 0.3315 | |
| OURS | 0.9711 | 0.9367 | 0.8956 | 0.8490 | 0.7949 | 0.7362 | 0.6666 | 0.5857 | 0.4724 | |
| Cameraman | MF | 0.7256 | 0.7206 | 0.7120 | 0.6988 | 0.6788 | 0.6358 | 0.4842 | 0.1839 | 0.0360 |
| ACWMF | 0.9398 | 0.8774 | 0.7122 | 0.4772 | 0.2626 | 0.1323 | 0.0790 | 0.0398 | 0.0207 | |
| DBA | 0.9840 | 0.9645 | 0.9373 | 0.9075 | 0.8676 | 0.8140 | 0.7649 | 0.6753 | 0.5723 | |
| NAFSM | 0.9796 | 0.9629 | 0.9422 | 0.9228 | 0.8957 | 0.8636 | 0.8232 | 0.7633 | 0.6456 | |
| NASEPF | 0.7435 | 0.6641 | 0.6221 | 0.5928 | 0.5697 | 0.5501 | 0.5431 | 0.5408 | 0.5597 | |
| INLM | 0.8752 | 0.8514 | 0.8054 | 0.7627 | 0.7395 | 0.7315 | 0.7462 | 0.7450 | 0.7125 | |
| DAMF | 0.9862 | 0.9705 | 0.9493 | 0.9277 | 0.8998 | 0.8673 | 0.8300 | 0.7727 | 0.7039 | |
| FSAP | 0.9844 | 0.9668 | 0.9423 | 0.9107 | 0.8671 | 0.8089 | 0.7411 | 0.6466 | 0.5256 | |
| OURS | 0.9870 | 0.9717 | 0.9513 | 0.9295 | 0.9035 | 0.8746 | 0.8423 | 0.7933 | 0.7362 | |
| Couple | MF | 0.6941 | 0.6862 | 0.6758 | 0.6568 | 0.6365 | 0.5853 | 0.4275 | 0.2018 | 0.0521 |
| ACWMF | 0.9633 | 0.9022 | 0.7493 | 0.5330 | 0.3277 | 0.1694 | 0.0839 | 0.0420 | 0.0208 | |
| DBA | 0.9861 | 0.9670 | 0.9378 | 0.8996 | 0.8568 | 0.7893 | 0.7024 | 0.5902 | 0.4184 | |
| NAFSM | 0.9859 | 0.9706 | 0.9500 | 0.9280 | 0.9026 | 0.8662 | 0.8269 | 0.7626 | 0.6148 | |
| NASEPF | 0.9397 | 0.9027 | 0.8697 | 0.8454 | 0.8192 | 0.7942 | 0.7652 | 0.7285 | 0.6169 | |
| INLM | 0.9764 | 0.9500 | 0.9272 | 0.9043 | 0.8790 | 0.8514 | 0.8261 | 0.7616 | 0.6809 | |
| DAMF | 0.9887 | 0.9740 | 0.9532 | 0.9311 | 0.9047 | 0.8686 | 0.8289 | 0.7696 | 0.6583 | |
| FSAP | 0.9856 | 0.9686 | 0.9415 | 0.9023 | 0.8443 | 0.7588 | 0.6510 | 0.5156 | 0.3524 | |
| OURS | 0.9893 | 0.9764 | 0.9580 | 0.9368 | 0.9125 | 0.8803 | 0.8476 | 0.7789 | 0.6973 | |
| Lena | MF | 0.7651 | 0.7565 | 0.7480 | 0.7332 | 0.7092 | 0.6514 | 0.4768 | 0.1922 | 0.0400 |
| ACWMF | 0.9733 | 0.9172 | 0.7477 | 0.5051 | 0.2708 | 0.1411 | 0.0691 | 0.0365 | 0.0139 | |
| DBA | 0.9856 | 0.9653 | 0.9416 | 0.9076 | 0.8692 | 0.8118 | 0.7326 | 0.6272 | 0.4832 | |
| NAFSM | 0.9872 | 0.9716 | 0.9540 | 0.9314 | 0.9070 | 0.8728 | 0.8301 | 0.7763 | 0.6457 | |
| NASEPF | 0.8310 | 0.7604 | 0.7202 | 0.6887 | 0.6689 | 0.6504 | 0.6437 | 0.6418 | 0.6035 | |
| INLM | 0.8871 | 0.8441 | 0.8183 | 0.7926 | 0.7817 | 0.7777 | 0.7852 | 0.7834 | 0.7247 | |
| DAMF | 0.9872 | 0.9716 | 0.9540 | 0.9314 | 0.9070 | 0.8734 | 0.8346 | 0.7848 | 0.6918 | |
| FSAP | 0.9857 | 0.9677 | 0.9428 | 0.9039 | 0.8501 | 0.7676 | 0.6655 | 0.5319 | 0.3946 | |
| OURS | 0.9887 | 0.9747 | 0.9588 | 0.9381 | 0.9176 | 0.8898 | 0.8596 | 0.8205 | 0.7461 | |
| Peppers | MF | 0.7881 | 0.7765 | 0.7668 | 0.7469 | 0.7237 | 0.6674 | 0.4788 | 0.2234 | 0.0546 |
| ACWMF | 0.9694 | 0.8945 | 0.7453 | 0.4967 | 0.3105 | 0.1609 | 0.0796 | 0.0417 | 0.0220 | |
| DBA | 0.9856 | 0.9633 | 0.9425 | 0.9058 | 0.8646 | 0.8064 | 0.7134 | 0.6150 | 0.4374 | |
| NAFSM | 0.9871 | 0.9707 | 0.9547 | 0.9300 | 0.9052 | 0.8727 | 0.8310 | 0.7735 | 0.6456 | |
| NASEPF | 0.8726 | 0.8078 | 0.7759 | 0.7430 | 0.7219 | 0.7032 | 0.6881 | 0.6797 | 0.6231 | |
| INLM | 0.9182 | 0.8799 | 0.8609 | 0.8361 | 0.8252 | 0.8194 | 0.8162 | 0.8069 | 0.7411 | |
| DAMF | 0.9874 | 0.9712 | 0.9553 | 0.9306 | 0.9061 | 0.8733 | 0.8347 | 0.7804 | 0.6917 | |
| FSAP | 0.9846 | 0.9650 | 0.9422 | 0.9024 | 0.8498 | 0.7770 | 0.6730 | 0.5464 | 0.3925 | |
| OURS | 0.9883 | 0.9749 | 0.9617 | 0.9410 | 0.9221 | 0.8966 | 0.8687 | 0.8300 | 0.7590 | |
| Street | MF | 0.6735 | 0.6683 | 0.6592 | 0.6493 | 0.6303 | 0.5877 | 0.4315 | 0.1796 | 0.0327 |
| ACWMF | 0.9712 | 0.8991 | 0.7287 | 0.4786 | 0.2635 | 0.1204 | 0.0571 | 0.0266 | 0.0112 | |
| DBA | 0.9818 | 0.9581 | 0.9284 | 0.8899 | 0.8429 | 0.7831 | 0.6988 | 0.5921 | 0.4433 | |
| NAFSM | 0.9837 | 0.9645 | 0.9419 | 0.9160 | 0.8855 | 0.8504 | 0.8024 | 0.7379 | 0.5966 | |
| NASEPF | 0.8713 | 0.8255 | 0.7931 | 0.7644 | 0.7375 | 0.7118 | 0.6820 | 0.6471 | 0.5626 | |
| INLM | 0.9024 | 0.8651 | 0.8364 | 0.8066 | 0.7818 | 0.7625 | 0.7456 | 0.7291 | 0.6696 | |
| DAMF | 0.9841 | 0.9649 | 0.9422 | 0.9164 | 0.8860 | 0.8511 | 0.8047 | 0.7456 | 0.6431 | |
| FSAP | 0.9827 | 0.9628 | 0.9369 | 0.9014 | 0.8550 | 0.7940 | 0.7133 | 0.6174 | 0.4985 | |
| OURS | 0.9858 | 0.9663 | 0.9435 | 0.9173 | 0.8888 | 0.8581 | 0.8190 | 0.7726 | 0.6944 | |
| Man-made | MF | 0.8845 | 0.8760 | 0.8615 | 0.8418 | 0.8189 | 0.7423 | 0.5703 | 0.3017 | 0.0752 |
| ACWMF | 0.9338 | 0.8529 | 0.7048 | 0.5012 | 0.3218 | 0.1728 | 0.0989 | 0.0532 | 0.0222 | |
| DBA | 0.9948 | 0.9850 | 0.9726 | 0.9495 | 0.9181 | 0.8744 | 0.8017 | 0.7175 | 0.5581 | |
| NAFSM | 0.9727 | 0.9625 | 0.9564 | 0.9483 | 0.9438 | 0.9306 | 0.9080 | 0.8721 | 0.7508 | |
| NASEPF | 0.4527 | 0.3886 | 0.3575 | 0.3381 | 0.3294 | 0.3285 | 0.3386 | 0.3679 | 0.4477 | |
| INLM | 0.5564 | 0.4712 | 0.4417 | 0.4281 | 0.4345 | 0.4599 | 0.5299 | 0.6327 | 0.7354 | |
| DAMF | 0.9968 | 0.9913 | 0.9844 | 0.9723 | 0.9606 | 0.9435 | 0.9162 | 0.8847 | 0.8002 | |
| FSAP | 0.9939 | 0.9851 | 0.9724 | 0.9471 | 0.9068 | 0.8615 | 0.7789 | 0.6558 | 0.4802 | |
| OURS | 0.9982 | 0.9945 | 0.9892 | 0.9795 | 0.9682 | 0.9529 | 0.9298 | 0.9018 | 0.8285 |
| Image Size | SWS | Standard | σ = 10% | σ = 20% | σ = 30% | σ = 40% | σ = 50% | σ = 60% | σ = 70% | σ = 80% | σ = 90% |
|---|---|---|---|---|---|---|---|---|---|---|---|
| PSNR | 30.26 | 27.25 | 26.86 | 25.62 | 24.22 | 23.10 | 21.97 | 20.53 | 18.64 | ||
| SSIM | 0.9681 | 0.9481 | 0.9250 | 0.8939 | 0.8567 | 0.8104 | 0.7539 | 0.6820 | 0.5687 | ||
| APSNR | 29.27 | 26.90 | 26.54 | 25.42 | 24.19 | 22.97 | 21.87 | 20.45 | 18.68 | ||
| SSIM | 0.9682 | 0.9472 | 0.9227 | 0.8908 | 0.8510 | 0.8023 | 0.7439 | 0.6687 | 0.5557 | ||
| PSNR | 30.17 | 28.27 | 26.57 | 25.5428 | 24.13 | 22.54 | 21.79 | 20.39 | 18.67 | ||
| SSIM | 0.9686 | 0.9484 | 0.9219 | 0.8892 | 0.8482 | 0.7976 | 0.7389 | 0.6625 | 0.5489 | ||
| PSNR | 30.36 | 28.19 | 25.81 | 25.40 | 24.05 | 22.78 | 21.73 | 20.35 | 18.66 | ||
| SSIM | 0.9684 | 0.9479 | 0.9207 | 0.8870 | 0.8453 | 0.7945 | 0.7353 | 0.6591 | 0.544 | ||
| PSNR | 36.74 | 34.52 | 32.47 | 31.00 | 29.66 | 28.40 | 27.12 | 25.83 | 23.82 | ||
| SSIM | 0.9820 | 0.9667 | 0.9462 | 0.9220 | 0.8937 | 0.8608 | 0.8203 | 0.7698 | 0.6020 | ||
| PSNR | 35.62 | 34.16 | 32.44 | 30.78 | 29.41 | 28.11 | 26.85 | 25.60 | 23.77 | ||
| SSIM | 0.9818 | 0.9656 | 0.9442 | 0.9178 | 0.8870 | 0.8510 | 0.8077 | 0.7547 | 0.6784 | ||
| PSNR | 36.53 | 34.28 | 32.33 | 30.66 | 29.28 | 27.93 | 26.65 | 25.42 | 23.67 | ||
| SSIM | 0.9818 | 0.9654 | 0.9429 | 0.9154 | 0.8835 | 0.8459 | 0.8010 | 0.7472 | 0.6707 | ||
| PSNR | 36.69 | 34.48 | 32.24 | 30.55 | 29.15 | 27.76 | 26.46 | 25.23 | 23.52 | ||
| SSIM | 0.9818 | 0.9653 | 0.9419 | 0.9134 | 0.8806 | 0.8416 | 0.7958 | 0.7413 | 0.6648 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, H.; Li, N.; Zhao, S. Salt and Pepper Noise Removal Method Based on a Detail-Aware Filter. Symmetry 2021, 13, 515. https://doi.org/10.3390/sym13030515
Liang H, Li N, Zhao S. Salt and Pepper Noise Removal Method Based on a Detail-Aware Filter. Symmetry. 2021; 13(3):515. https://doi.org/10.3390/sym13030515
Chicago/Turabian StyleLiang, Hu, Na Li, and Shengrong Zhao. 2021. "Salt and Pepper Noise Removal Method Based on a Detail-Aware Filter" Symmetry 13, no. 3: 515. https://doi.org/10.3390/sym13030515
APA StyleLiang, H., Li, N., & Zhao, S. (2021). Salt and Pepper Noise Removal Method Based on a Detail-Aware Filter. Symmetry, 13(3), 515. https://doi.org/10.3390/sym13030515