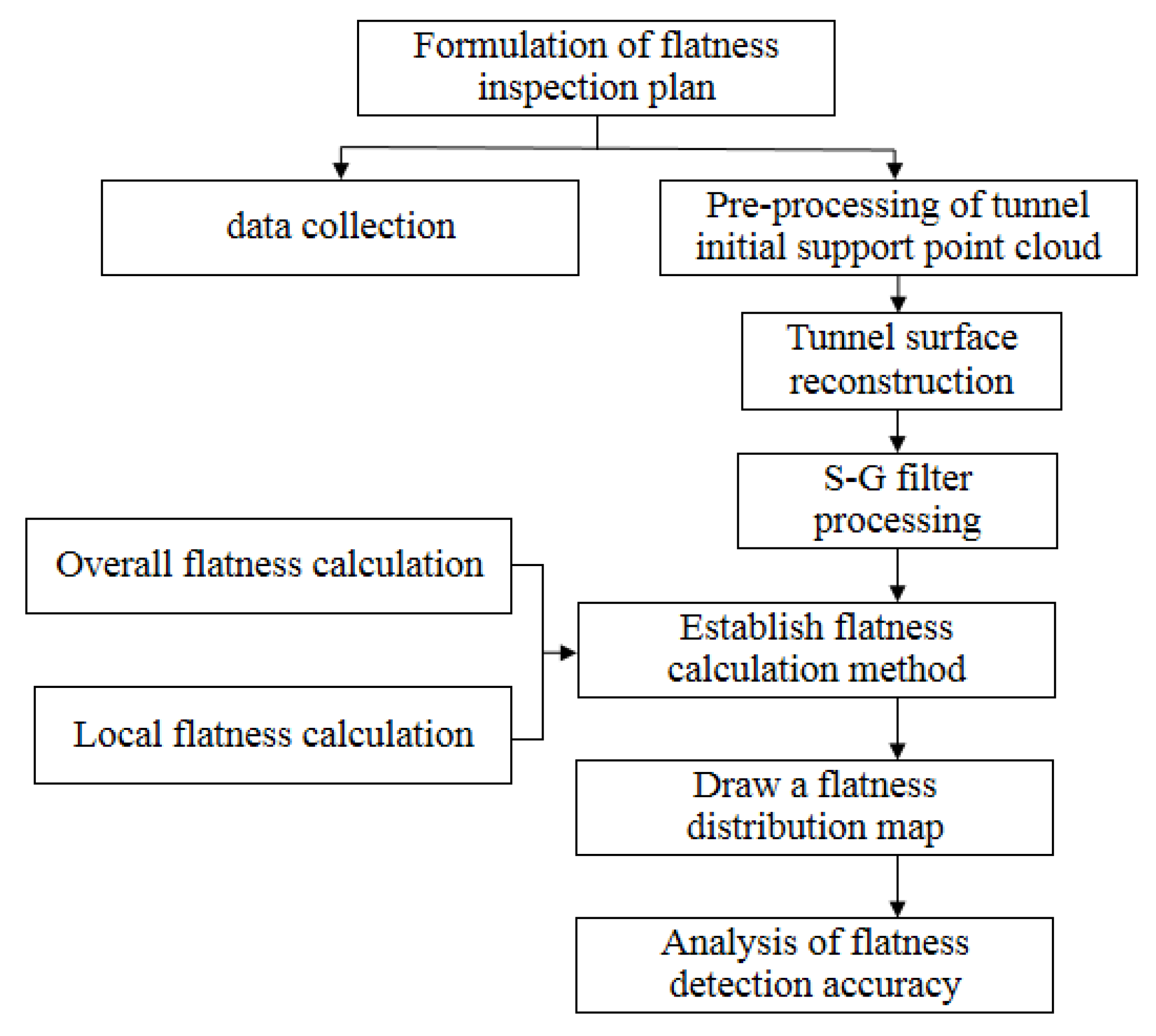
2. Acquisition of Flatness Calculation Datum
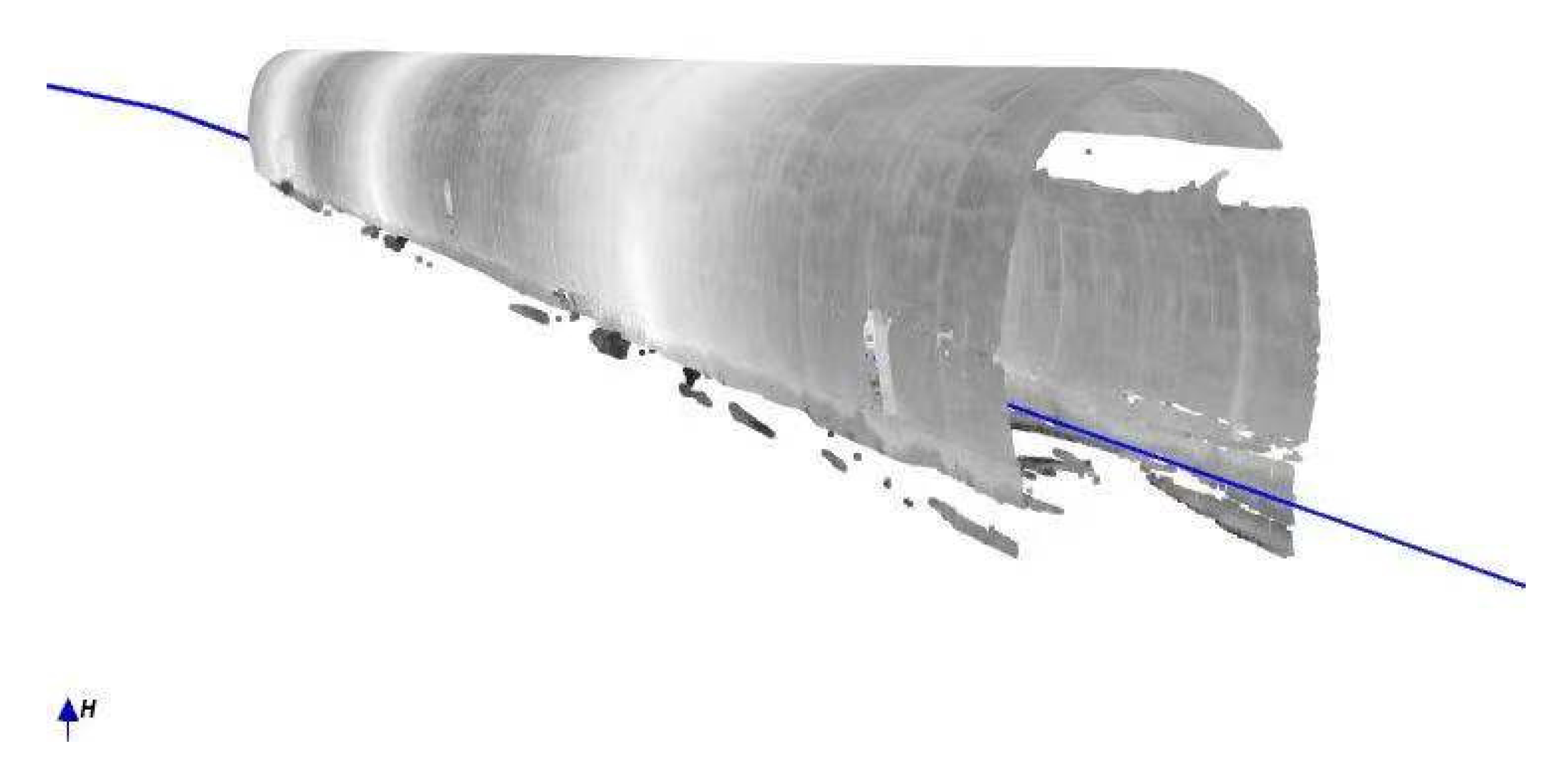
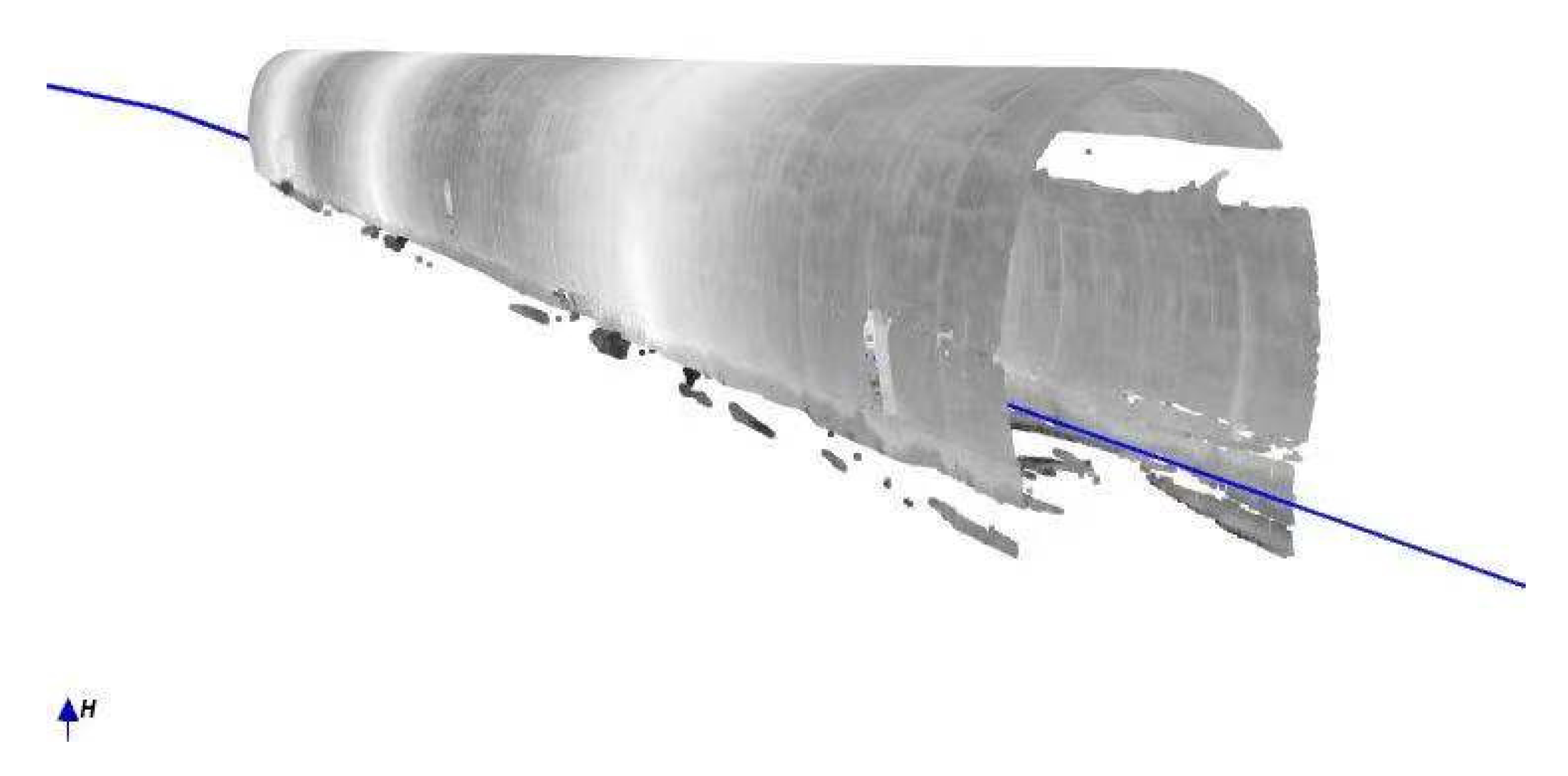
To establish a detection system for the surface flatness of the initial support of the tunnel based on the three-dimensional laser scanning technology, the acquisition of the flatness calculation datum is very important. The point cloud of the tunnel after preprocessing (
Figure 4) is very smooth, which is conducive to the reconstruction of the tunnel model. The reconstruction of the tunnel point cloud model is essentially the surface fitting of the point cloud, and the discrete point cloud is fitted to a curved surface that approximates the surface of the target object. The accuracy of the fitted surface also directly affects the calculation of the flatness of the initial support surface of the tunnel result. The flatness calculation datum surface is essentially a fitting surface suitable for flatness calculation obtained by the point cloud data through the fitting method and optimization processing. To obtain the flatness calculation reference surface, selecting a suitable fitting method can effectively improve the degree of fitting optimization.
2.1. Comparison of Fitting Methods
Common surface fitting methods include the meshing method [
26], Poisson surface reconstruction method [
27], Lagrangian interpolation method [
28], and cubic spline interpolation method [
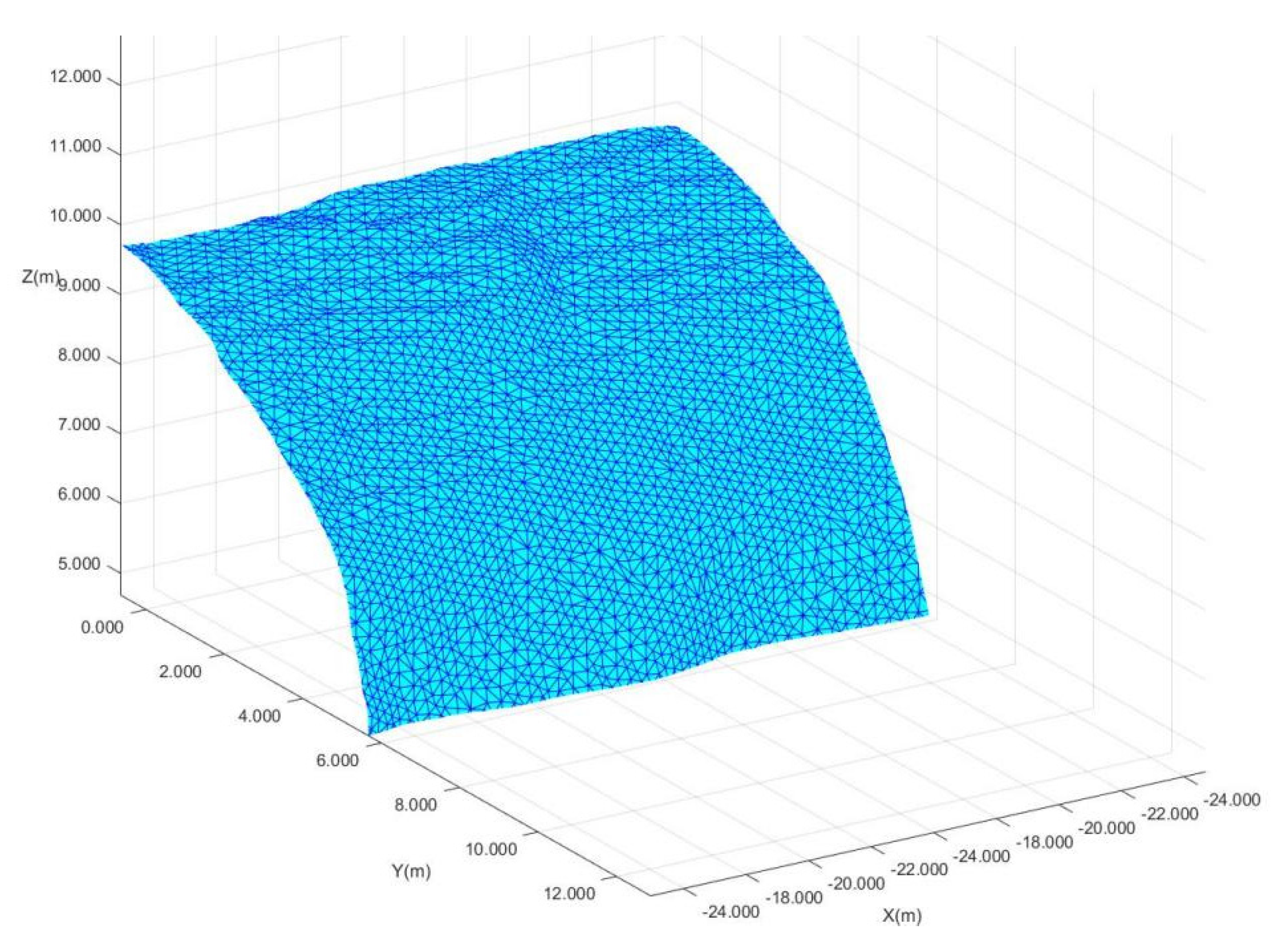
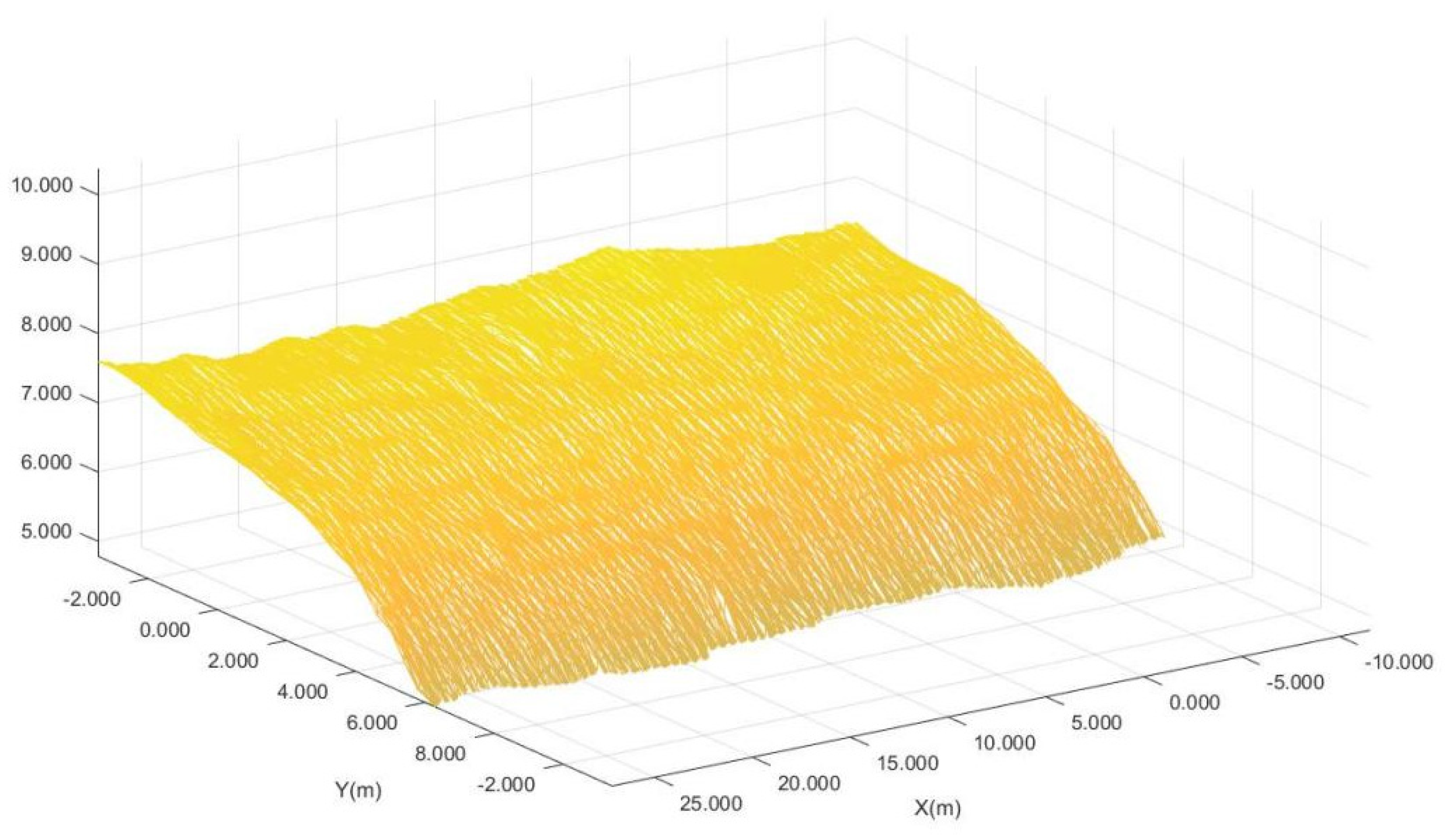
29]. This experiment uses 3DLS The instrument obtains the surface point cloud data of the initial branch of the tunnel K109+870~K109+900 in the tunnel project, and takes the point cloud data of some areas as the analysis object, and compares and analyzes the fitting degree and fitting of the four methods when constructing the surface. Accuracy. In the schematic diagram of the degree of surface fitting by the four fitting methods, the
X axis represents the direction along the central axis of the tunnel, the
Y axis represents the horizontal direction of the tunnel cross-section, and the
Z axis represents the vertical direction of the tunnel cross-section. In the schematic diagram, only the intercept Part of the area on the surface of the tunnel.
(1) The degree of fit of the four methods
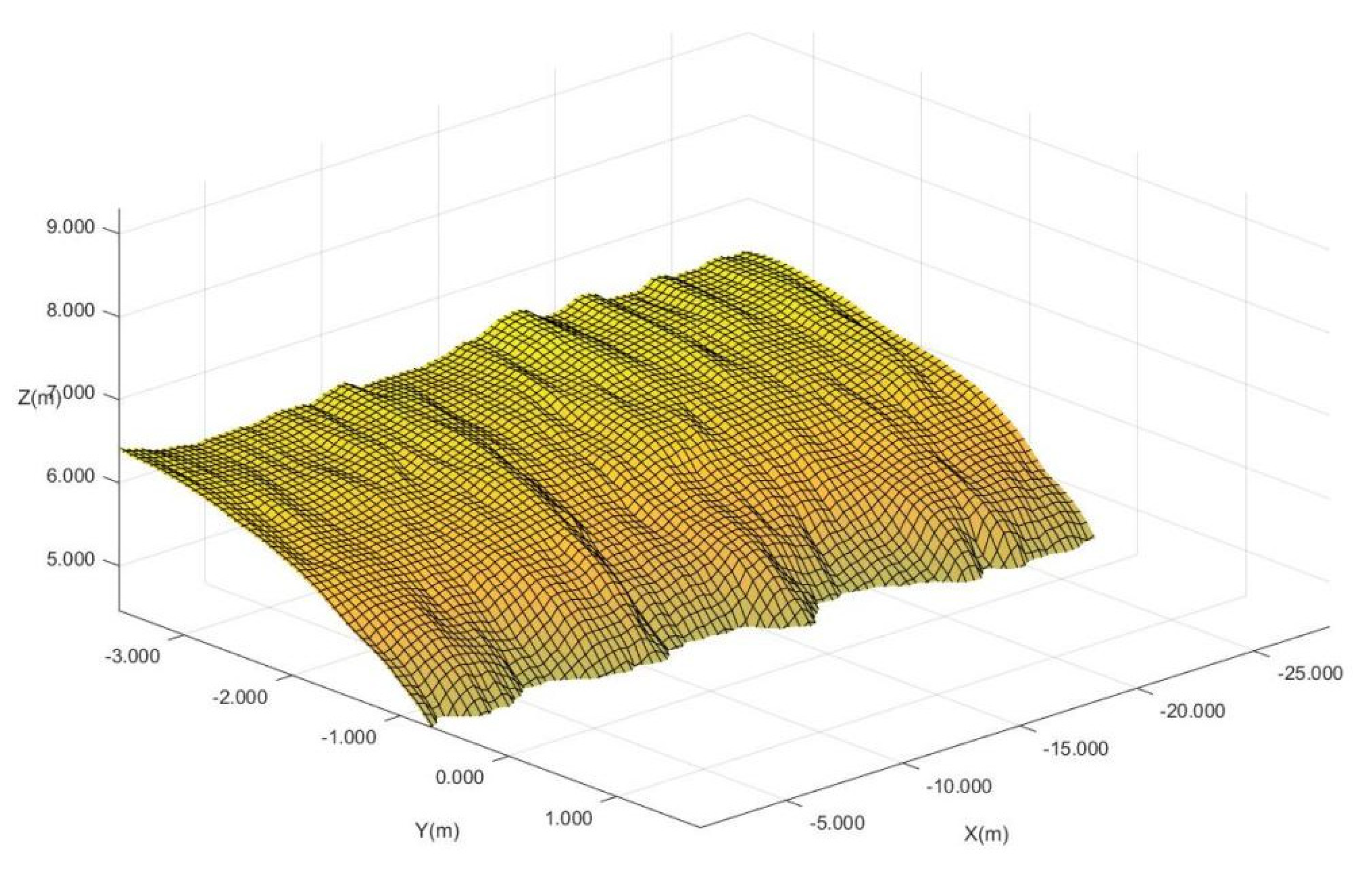
After the tunnel surface is constructed by meshing (
Figure 5), the surface is complete and has good continuity, but the smoothness of the surface is poor, and the details of the local area are not enough.
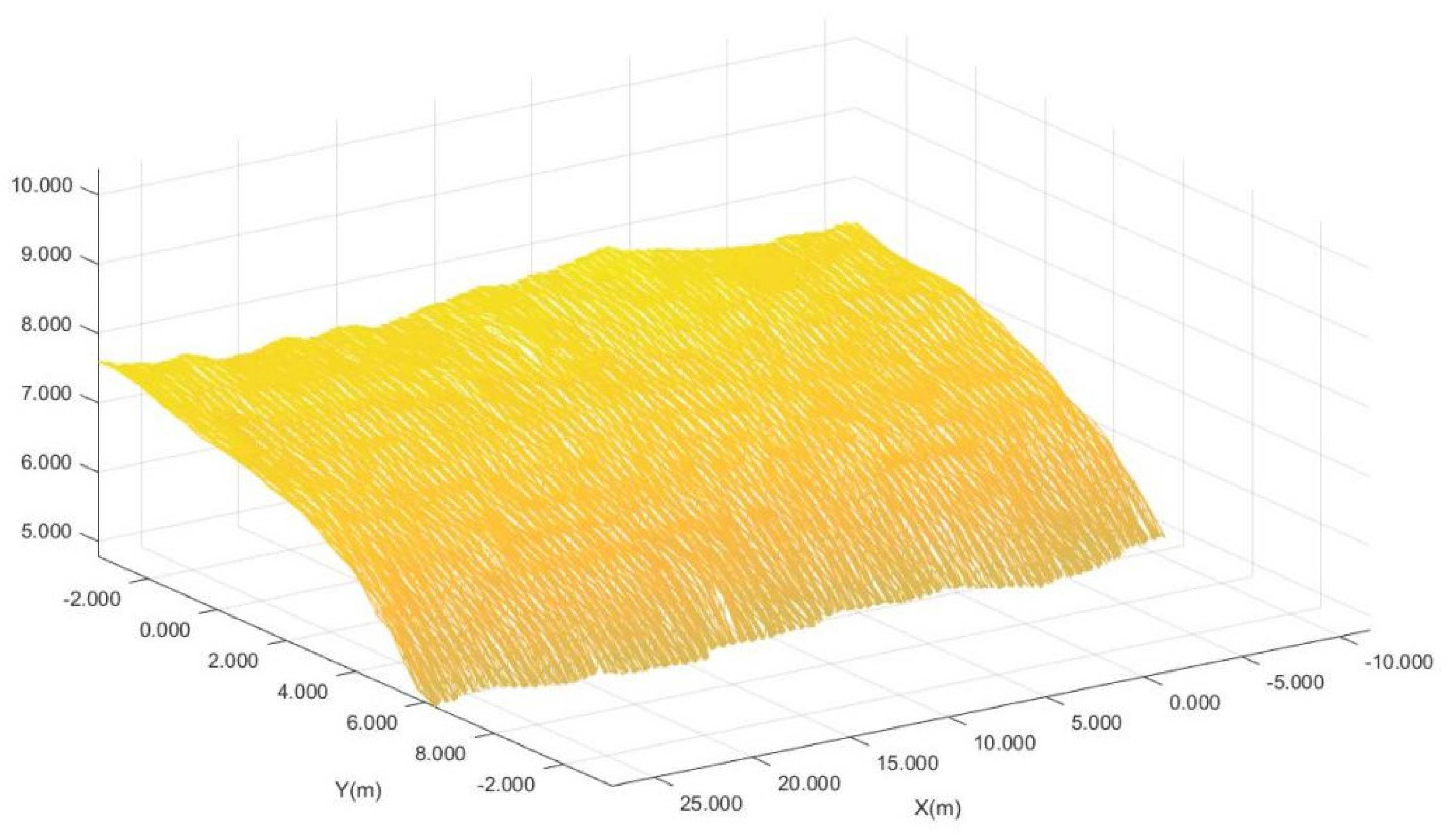
The tunnel surface obtained by the Poisson reconstruction method (
Figure 6) is continuous and complete, which can reflect the unevenness of the tunnel surface, but the smoothness of the surface is not high, and the construction details of the point cloud cavity are insufficient.
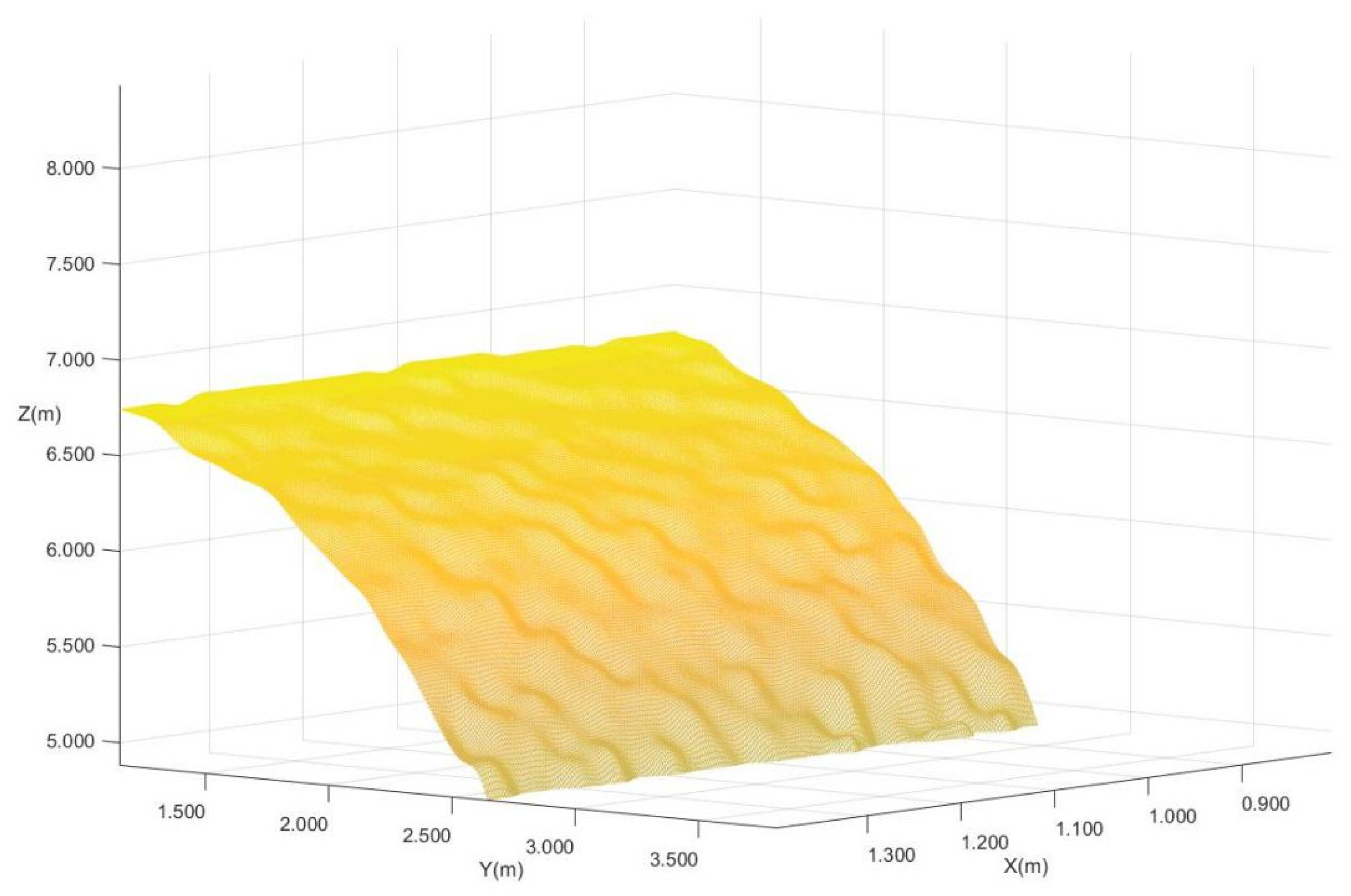
The tunnel surface constructed by the Lagrangian interpolation method (
Figure 7) can reflect the overall contour of the tunnel surface and can reflect the basic details of the tunnel surface in a local area. However, the smoothness of the surface constructed by this method is poor, and there are convex hulls. Phenomenon.
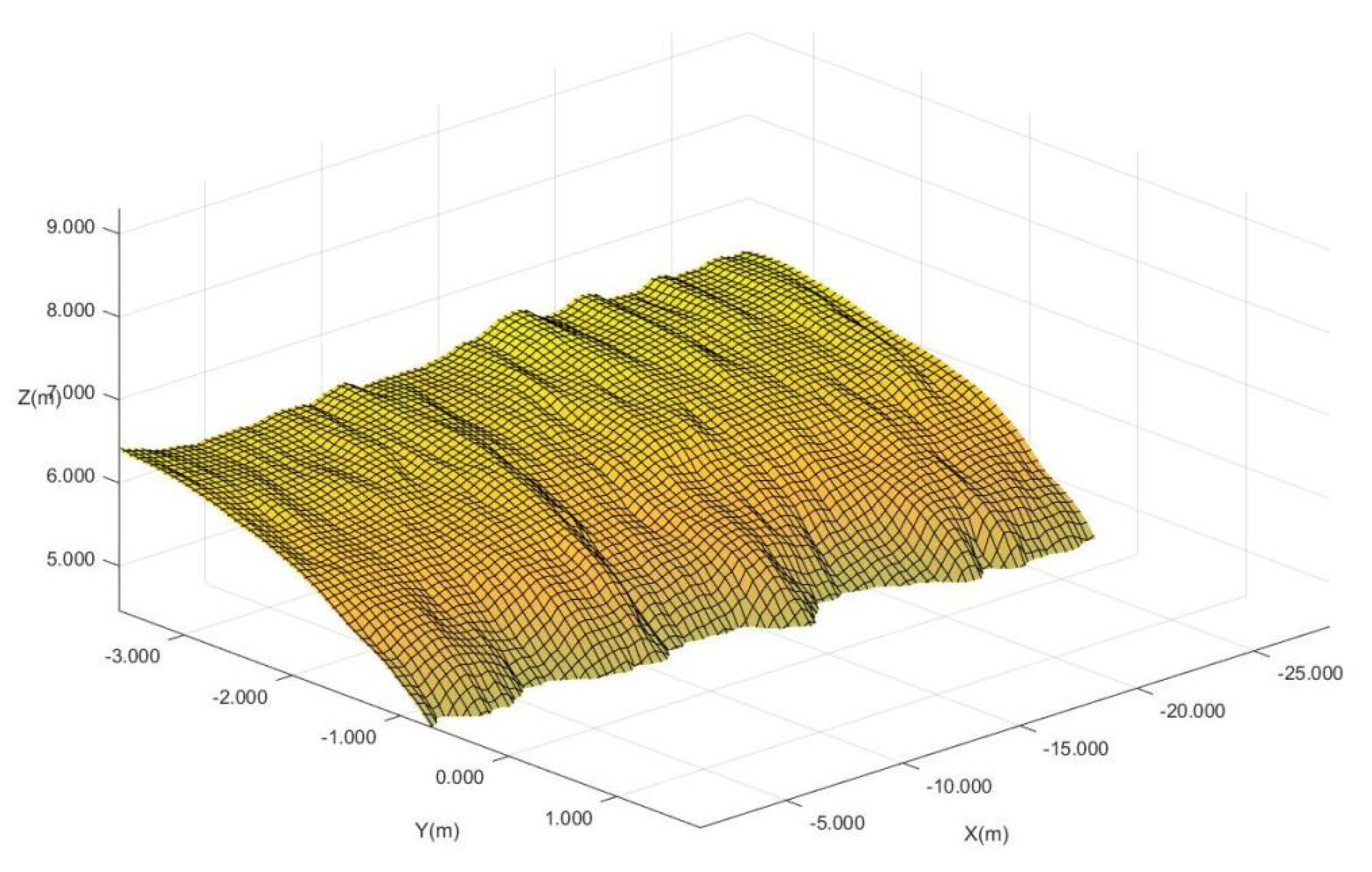
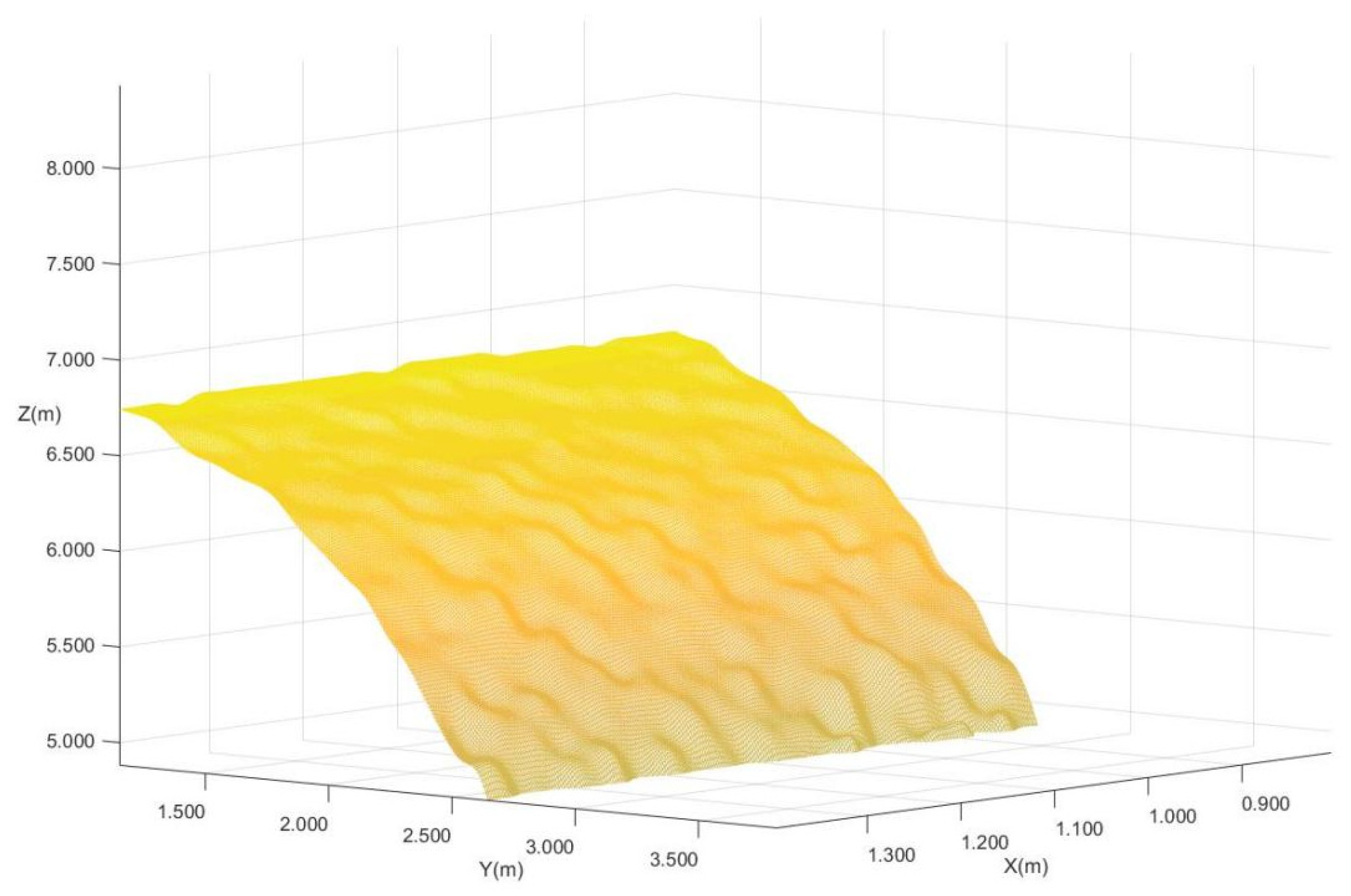
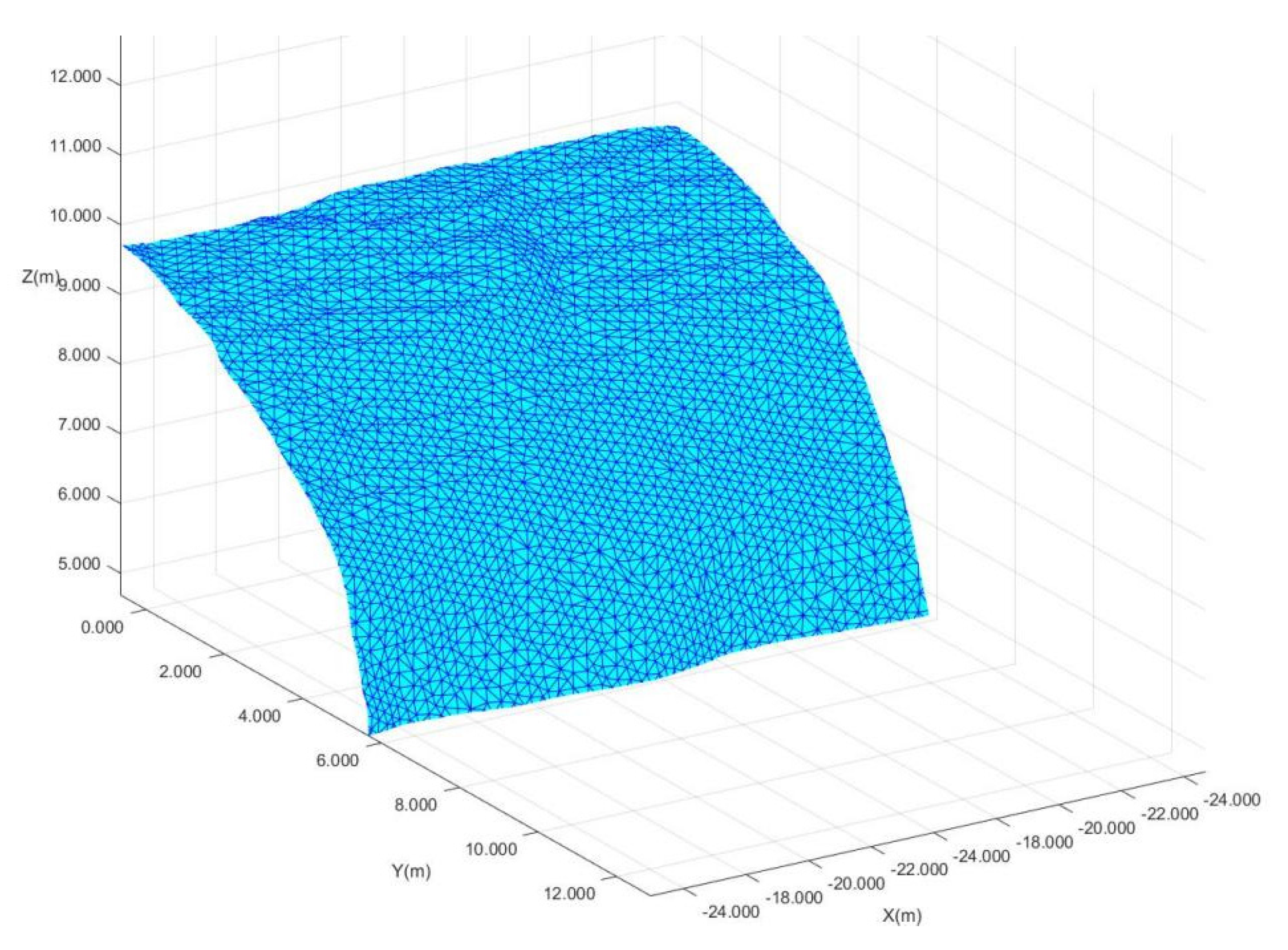
The tunnel surface constructed by the cubic B-spline interpolation method (
Figure 8) is continuous and complete, with high smoothness, no local mutations, etc., and the details of the local area are rich, and the tunnel surface is better restored.
(2) Analysis of the fitting accuracy of the four methods
The data this time is a total of 40,000 point clouds. The data points are extracted 5 times from the point cloud data at 5 cm intervals and 100 data points are randomly selected each time, which is divided into 5 groups. After that, the
z value corresponding to each point is stored in the order of arrangement, and then the surface is constructed using four methods for the 10 cm interval point cloud data. The
x and
y of each stored point on the surface correspond to the corresponding
z value, 5 cm interval points are compressed to get 10 cm interval point clouds, so the
z value on the surface obtained by the 10 cm interval point cloud fitting is different from the corresponding
z values of the points stored in the 5 cm interval point cloud. According to the
x and
y of the stored point, the corresponding surface can be obtained and stored, and then the difference of the corresponding point is calculated. This method is equivalent to the error calculation of the 10 cm interval point cloud, by calculating the sum of each point The fitting difference value corresponding to the fitting surface, the fitting difference value formula is
where:
p = 1, 2, 3, …,
n.
The fitting error generated by the constructed surface can also be called the root mean square error. By counting the root mean square error, you can get the error of the area where the surface other than the original point is located. The root mean square error formula is:
According to Formula (2), four interpolation methods are used to construct the surface, and the fitting error is calculated based on 5 sets of data, as shown in
Table 2.
It can be seen from the tab that the point cloud fitting errors of the Poisson reconstruction method and cubic B-spline interpolation method are kept in a small range, and the fitting accuracy is high. The fitting accuracy of the Lagrangian interpolation method is not high. The grid division method has the largest fitting error and the lowest precision. The results show that the construction of tunnel surface by the Poisson reconstruction method and cubic B-spline interpolation method has higher fitting accuracy.
By comparing and analyzing the fitting degree and fitting accuracy of the four fitting methods when constructing the surface, the following conclusions are drawn: the smoothness of the surface constructed by the meshing method is poor, and the fitting accuracy is low; Poisson reconstruction The fitting accuracy of the method is high, but the surface lacks a certain degree of smoothness; the surface fitting effect constructed by the Lagrangian interpolation method is better, but the fitting accuracy is not high; the cubic B-spline interpolation method has high fitting accuracy, compared with other methods, the surface details are complete and the smoothness is higher. This method has more advantages in the construction of the tunnel surface and has the least influence on the calculation results of the surface flatness of the initial support of the tunnel.
2.2. Optimal Fitting of Cubic B-Spline Interpolation
The main ideas for the optimal fitting of the original point cloud of the tunnel based on the cubic B-spline interpolation method are:
The point cloud data is divided into slices according to the
x-direction, that is, the tunnel axis direction, which is equivalent to taking a tiny dx as the threshold. The
x coordinate changes of the point cloud data within this range are considered to be on a 2-dimensional slice point. Then perform spline curve-fitting on this two-dimensional slice. First, convert Cartesian coordinates to polar coordinates. Since the cross-section of the tunnel is a curve similar to an arc, after changing to polar coordinates, it can be ensured that the depression angle and the polar radius can be in a one-to-one correspondence. Then use polar coordinates for interpolation and encryption based on the spline curve, and then convert the polar coordinates back to rectangular coordinates to complete the fitting of each section of the tunnel. For the same reason, perform the above processing again in the
Y direction. After processing, the curve interpolation is carried out in the two orthogonal directions of the tunnel
x and
y, and the interpolation in the two directions is superimposed to form the fitting surface of the first branch surface of the tunnel [
30].
The method of two-way slice complementary to the overall surface of the tunnel proposed in this study effectively eliminates the jagged layering effect of the one-way slice on the overall fitting surface of the tunnel, and the enlarged tunnel surface appears smoother. The cloud fitting operation speed is also faster than the overall point cloud fitting surface [
31].
2.3. S-G Filter Smoothing Based on Curvature
The curved surface after the fitting process by cubic B-spline interpolation has a high degree of smoothness, good continuity, and more complete and rich local details, which is more consistent with the actual engineering situation. However, the fitted surface still has many point clouds that deviate from the actual surface, and its accuracy cannot meet the requirements of flatness calculation. To make the final fitting surface that can meet the requirements of flatness calculation, the fitting surface should not only be close to the actual situation but also ensure that the fitting surface has sufficient smoothness. To further limit the smoothness and authenticity of the fitted surface, this study guarantees the reliability of the fitted surface by limiting the curvature of each point on the fitted surface. Based on the fitting processing of cubic B-spline interpolation, The fitted surface is again processed by SG filtering based on curvature limitation [
32]. In all tunnel projects, the design parameters of the Leicaoshan Tunnel are universal, and among many tunnels, Leicaoshan Tunnel is the most typical. The flatness detection method in this study specifies the upper and lower limits of the tunnel point cloud curvature as the curvature parameter value of the Leicaoshan Tunnel. That is, the upper limit is specified as the maximum curvature of the vault in the design parameters of Leicaoshan Tunnel, 0.395, and the lower limit is specified as the minimum curvature of the arch bottom in the design parameters of Leicaoshan Tunnel, 0.104.
The specific plan for curvature limitation is as follows:
(1) First, the curvature of any point on the curve is calculated by the curve function. The curvature of a point is calculated based on the first and second derivatives of the two points before and after. Since the fitted surface obtained by the B-spline interpolation method is fitted by the slicing method, the curvature in this step is also used in the same way. The two-dimensional curvature of each tangent surface in the previous B-spline interpolation method is calculated. Superimposed to form the curvature of the entire surface, the formula for calculating the curvature is as follows:
In the formula, K is the curvature at a point on the curve, and y is the function of the corresponding curve.
(2) There are points in the calculated surface point cloud curvature that are not within the limited range. At this time, it is necessary to perform smoothing and filtering again on the surface obtained by the B-spline interpolation method. For the cross-sectional direction and the longitudinal direction, the data in the two directions is smoothed and filtered again. Taking into account the symmetry of the tunnel and the requirements for the calculation of the surface flatness of the initial support of the tunnel, Savitzky–Golay filtering is used here. The processing of S-G filtering maintains the best shape of the original data, making the processed surface closer to the actual engineering situation.
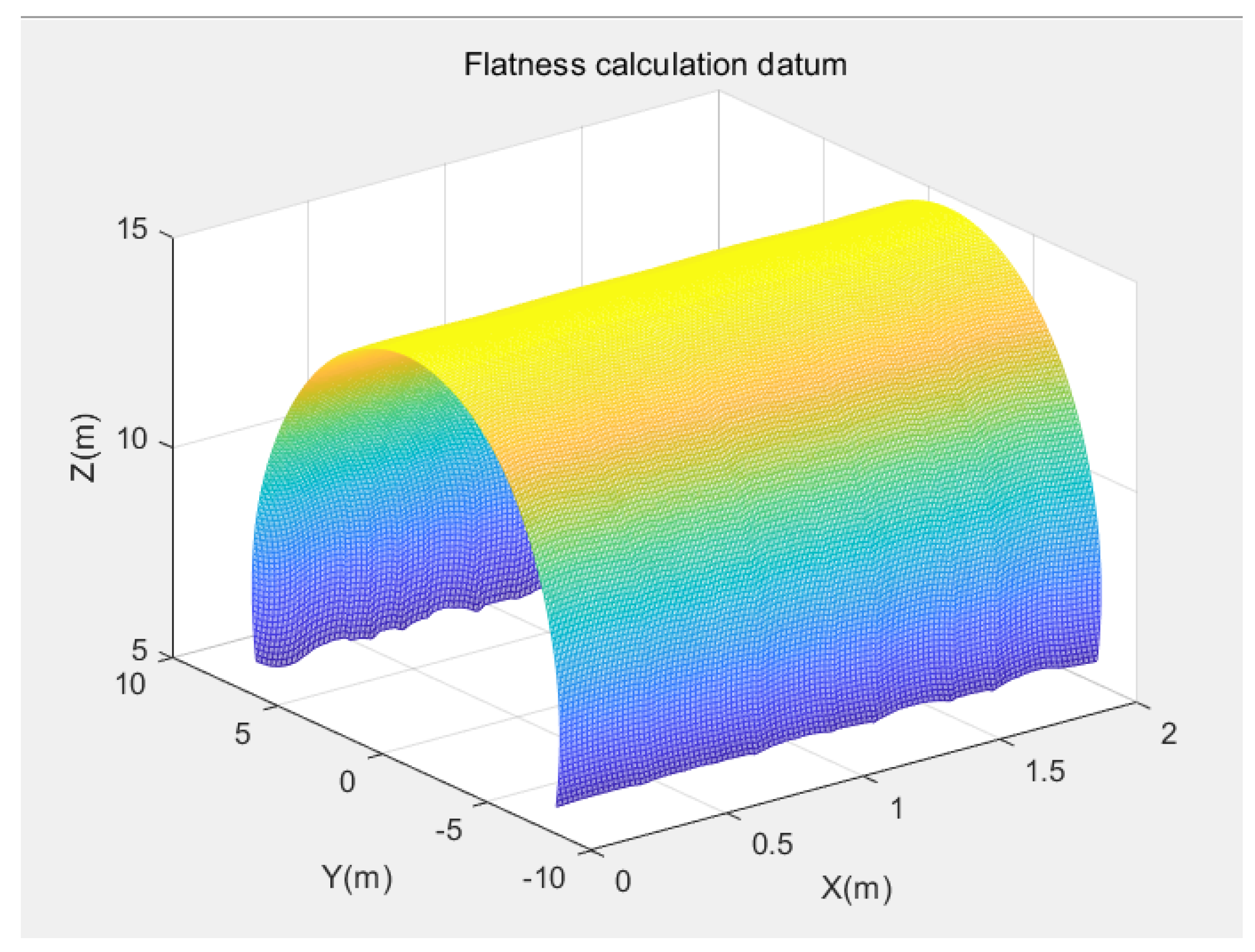
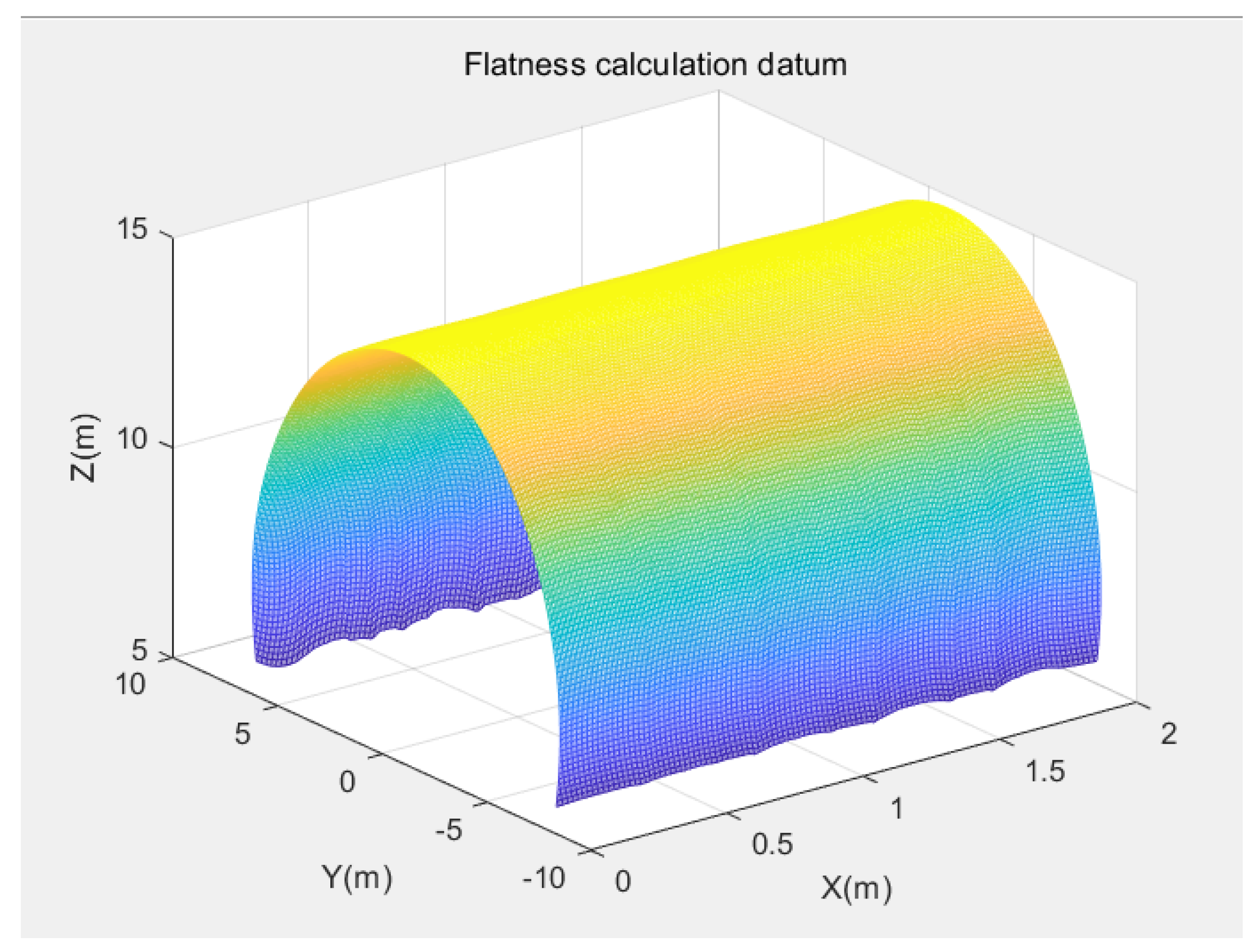
(3) After removing the unqualified points through the above method, the remaining unqualified points are only the points at the bottom of the arch. Because the curvature calculation is calculated using the curvature of the front and back slices, the curvature calculated at the two ends of the point cloud data, namely the two arch bottoms on the left and right, is meaningless in itself, and it can be directly eliminated. At this point, the final flatness calculation datum (
Figure 9) is obtained surface. In the figure, the
X axis direction represents the direction along the central axis of the tunnel, the
Y axis represents the horizontal direction of the tunnel cross-section, and the
Z axis represents the vertical direction of the tunnel cross-section. Segment fitting surface.
3. Flatness Calculation
Through the above method, the flatness calculation reference surface has been obtained. The flatness calculation method in this article is based on the normal vector distance from the original point cloud of the initial support surface of the tunnel to the flatness calculation datum plane. The calculation of the normal vector distance only needs to use the original point cloud to make a normal ray perpendicular to the flatness calculation datum plane. The normal ray and the fitted surface intersect at a point, and the distance between this point and the starting point of the ray is the normal vector distance di. Flatness calculation can be divided into two parts: overall flatness and local flatness. The calculation of overall flatness is to analyze the unevenness of the overall point cloud in a region, and the calculation of local flatness is to analyze the point cloud on the local details of a region. The degree of unevenness.
3.1. Overall Flatness
The overall flatness of the initial support surface of the tunnel is mainly determined by the dispersion degree of the normal vector distance from the original point cloud to the flatness calculation datum. If the dispersion is large, it means that the original point cloud and the flatness calculation datum are quite different. The rougher the surface. If the degree of dispersion is small, it means that the difference between the original point cloud and the flatness calculation reference plane is small, and the surface is flatter.
To intuitively express the overall flatness of the surface of the initial support of the tunnel, the concept of standard deviation is introduced. Simply put, the standard deviation is a measure of the degree to which a set of values are scattered from the average. A larger standard deviation means that the difference between most of the values and its average is larger; a smaller standard deviation means that these values are closer to the mean.
To sum up, the formula for calculating the overall flatness of the initial support surface of the tunnel is as follows:
In the formula, m0 is the overall flatness of the initial support surface of the tunnel, di is the normal vector distance, and n is the no. of point clouds collected during flatness detection.
3.2. Local Flatness
The overall flatness of the surface of the initial support of the tunnel can only reflect the overall flatness of a specific section of the tunnel. In a specific tunnel project, the overall flatness of the surface of the first support of the tunnel can only play a qualitative role, but cannot pass a quantitative one. Method to define the leveling degree of the specific local location of the tunnel surface. Therefore, the concept of local flatness is introduced, and the uneven points on the local details of the initial support surface of the tunnel are expressed through the concept of local flatness.
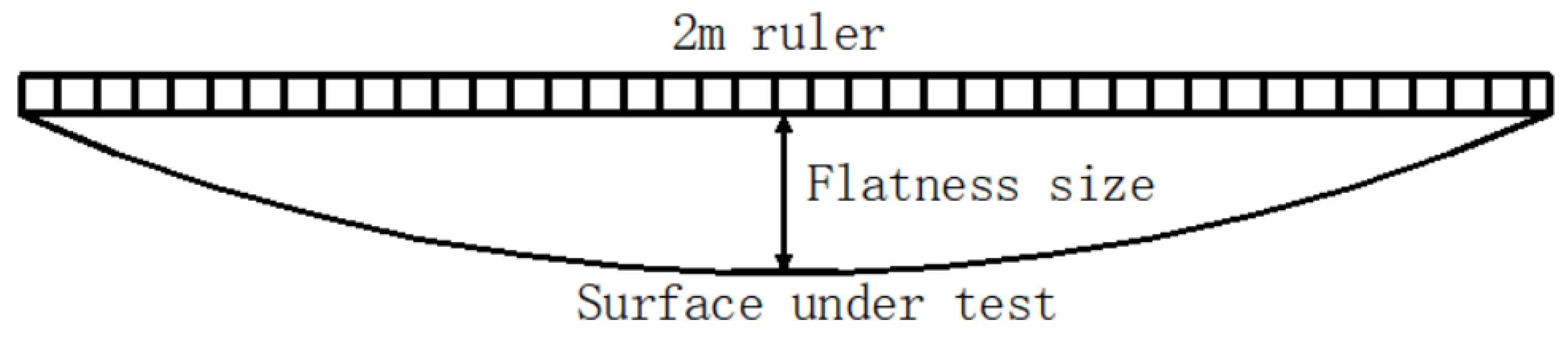
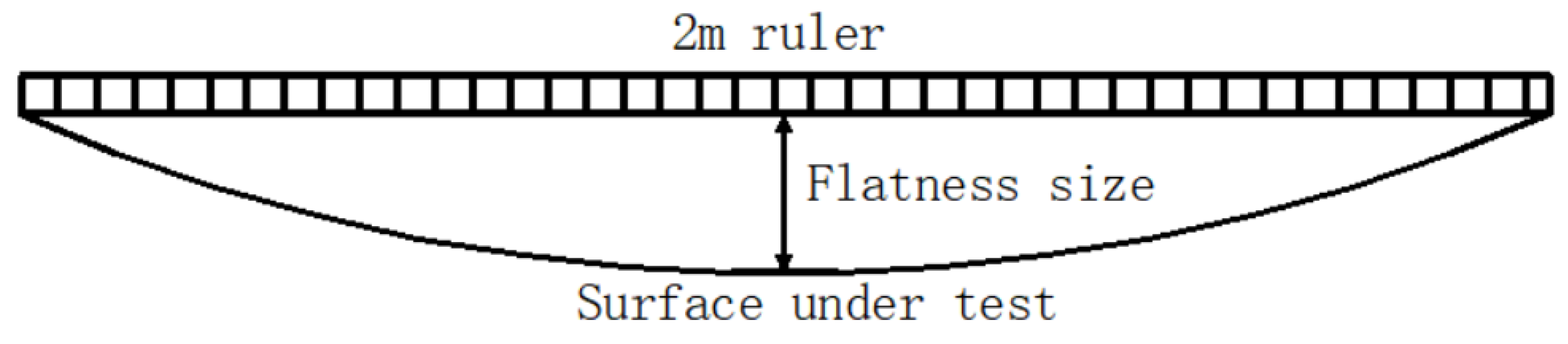
In the traditional method of detecting the surface flatness of the initial support of the tunnel, the 2 m ruler method is generally used to define the flatness: the maximum gap value between the reference plane of the 2 m ruler and the measuring surface. Usually, two points are measured every 200 m, and each point is continuously tested 10 times. According to the qualified rate, it is judged whether the surface flatness meets the measurement requirements. The schematic diagram for defining the flatness of the 2 m leaning rule method is shown in
Figure 10.
By referring to the flatness definition method in the 2 m ruler method, this paper introduces the local flatness definition method based on 3DLS technology:
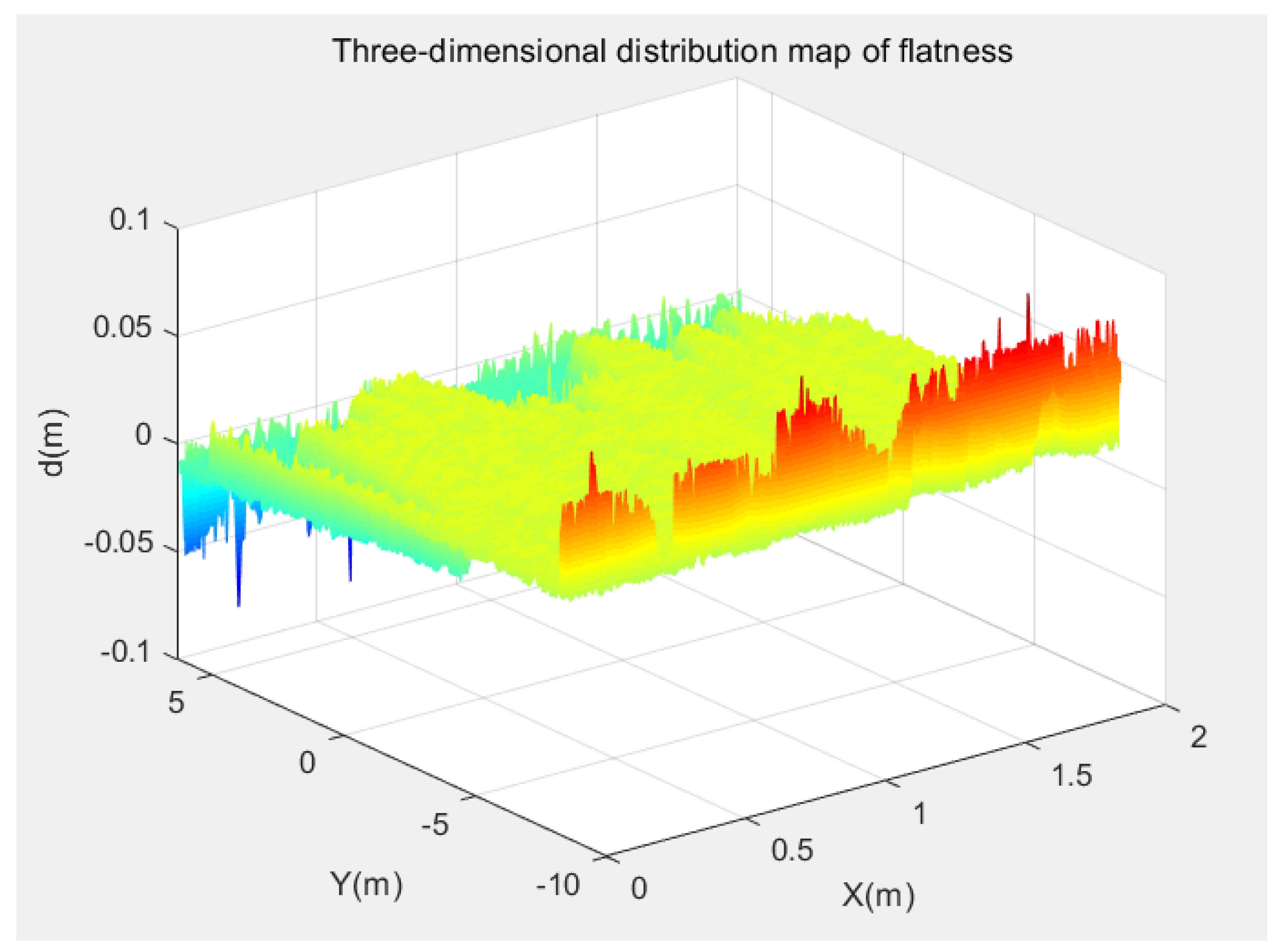
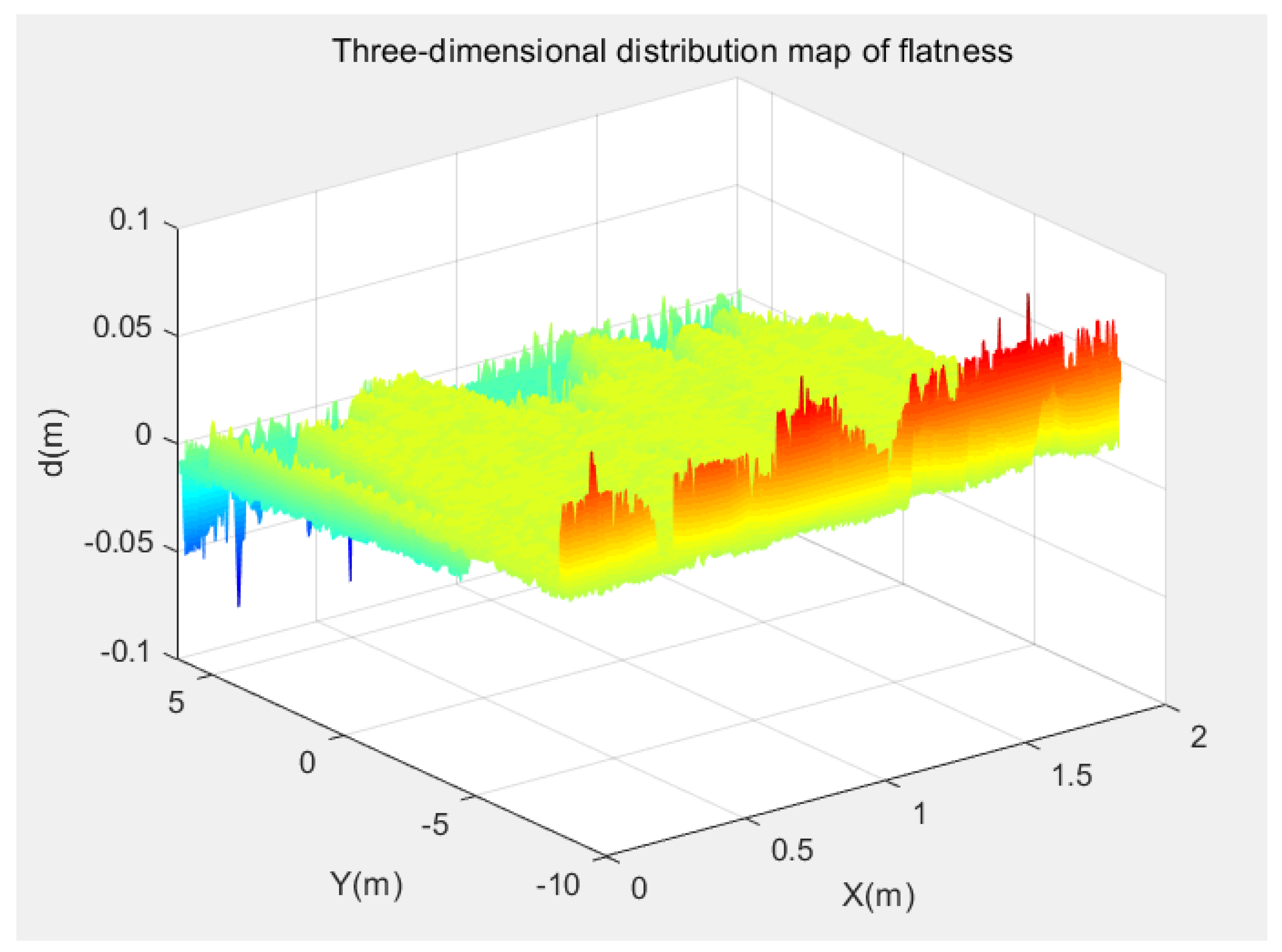
(1) First obtain the three-dimensional distribution map of flatness as shown in
Figure 11, where the
X axis represents the direction of the tunnel’s central axis, the
Y axis represents the direction of the tunnel cross-section, and the
Z axis represents the normal vector distance of the original point cloud and flatness calculation reference plane. Flatness situation. It can be clearly seen from the three-dimensional map of flatness that the flatness of the tunnel has symmetry along the direction of the tunnel’s central axis (
Y = 0). The flatness of the left arch of the tunnel is mostly on the negative
Z semi-axis, and the flatness of the right arch of the tunnel is mostly on the positive
Z semi-axis.
(2) The flatness data in the Figure constitutes a 3-dimensional scalar field. First, calculate the gradient value of this scalar data point at each point. However, the size of this gradient is of no practical significance to the calculation of local flatness here, because what needs to be known here is only the direction of the gradient. Theoretically, every point on a three-dimensional surface has countless directions that can be changed, and the gradient of each point is calculated only to obtain the direction with the largest change in flatness.
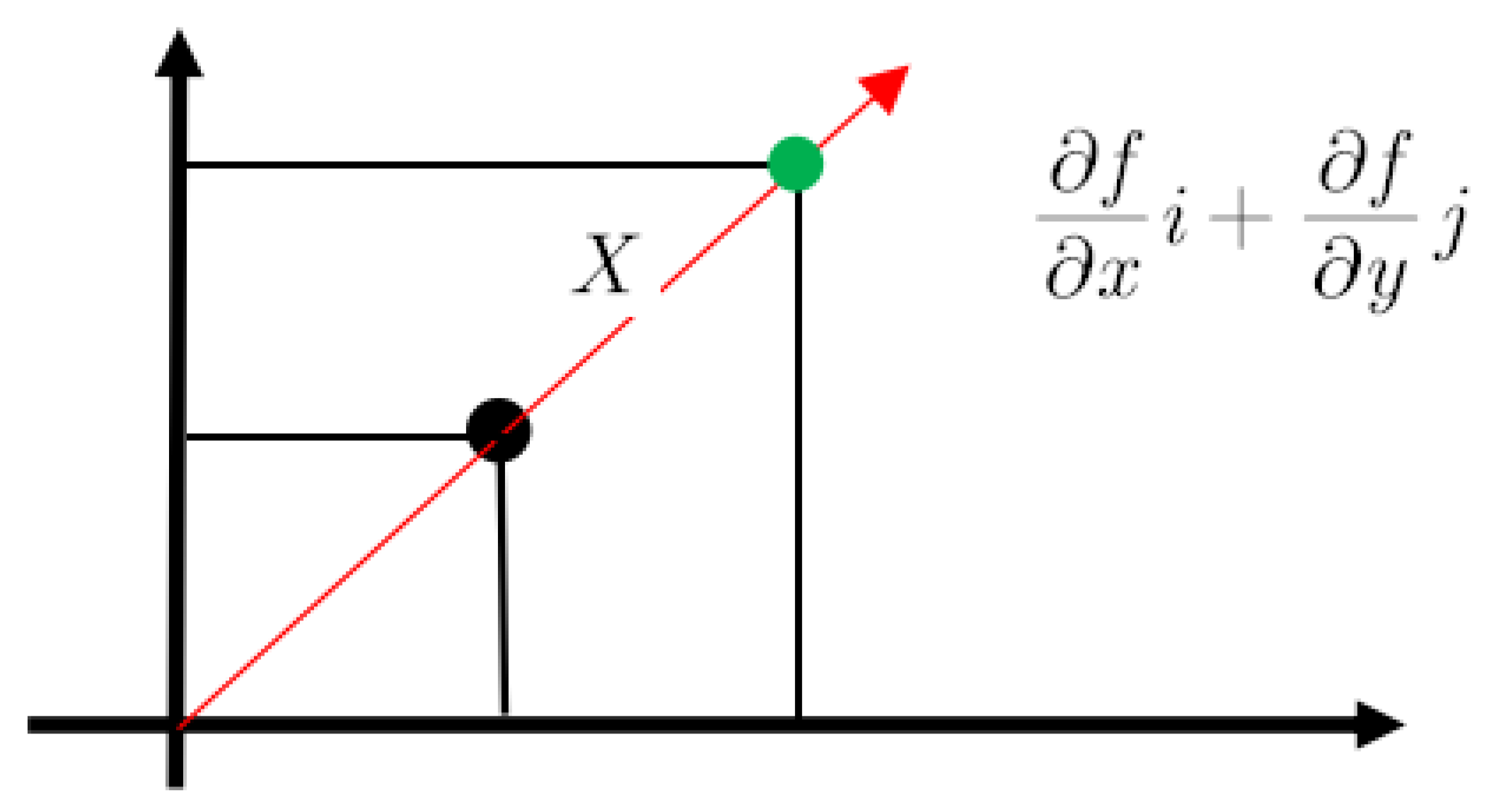
(3) As it is the gradient of a 2-variable function, the value obtained corresponds to the components in the x-direction and the y-direction, which is as follows:
In this way, the direction of the gradient vector can be determined based on the x component and the y component, and the direction angle of the gradient can also be obtained.
(4) The flatness distribution map drawn according to the normal vector distance is similar to the topographic map. Here we draw on the principle of slope in the topographic map, slope = elevation difference/horizontal distance, in the gradient direction of each point, calculate the slope i and the inclination angle. The distance X can be adjusted according to the accuracy requirements.
(5) Once the horizontal distance is determined, the height difference between the two points can be known. It can be imagined that a certain point is the center of the circle, the horizontal distance is the radius, and the gradient direction is unique. In the gradient direction, the height changes the fastest, and the highest height difference is obtained when the horizontal distance is constant.
Note: What needs attention here is how to find the corresponding horizontal distance according to the direction of the gradient, as shown in
Figure 10 below.
Assume that the red arrow is the direction angle of the calculated gradient vector, and the black dot is the normal vector distance data of a certain point, that is to say, the normal vector distance data is along the red arrow. The direction is the fastest-changing direction (gradient direction). The original coordinates of the point can be identified in
Figure 10, and the length
X along the gradient direction can be expressed as the green point in
Figure 12. In the gradient diagram, the horizontal axis represents the direction along the central axis of the tunnel, and the vertical axis represents the direction of the cross-section of the tunnel. The endpoint of the original point gradient direction is the green point, which can be obtained in the two-dimensional coordinate plane.
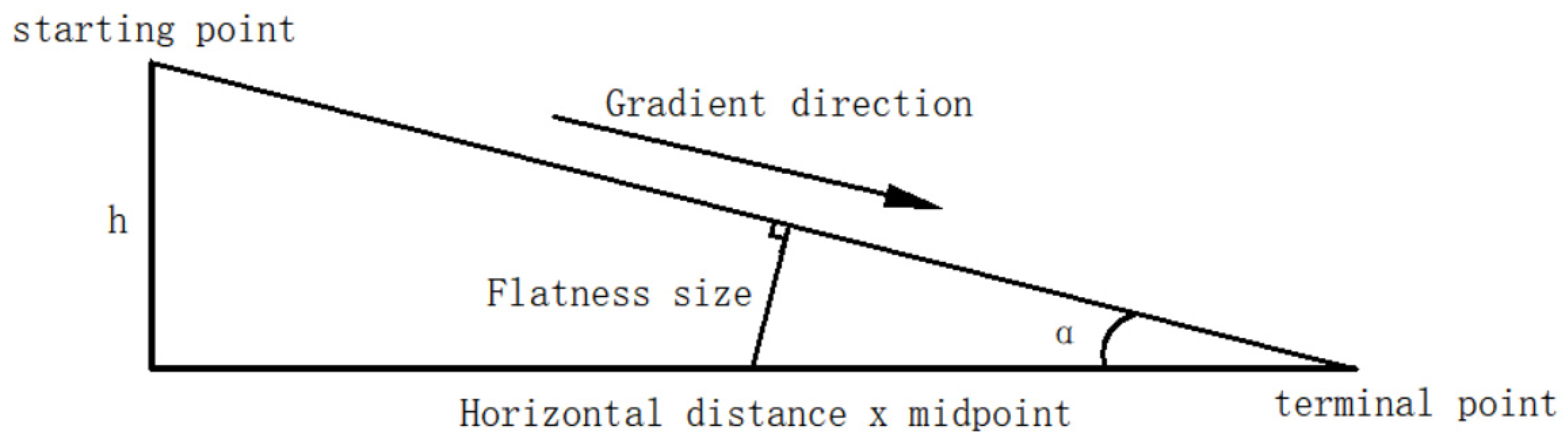
(6) To make the definition of local flatness meet the measurement requirements as much as possible and meet the technical specifications of tunnel engineering construction, the introduced three-dimensional laser scanning technology-based tunnel engineering primary surface flatness definition formula is as follows:
In the formula, m1 is the local flatness of the initial support surface of the tunnel, X represents the step distance of the original point cloud along the gradient direction, h represents the height difference between the starting point and the endpoint of the stepping direction, and represents the inclination angle between the two points.
The schematic diagram of the local flatness definition is shown in
Figure 13. The horizontal axis represents the direction of the horizontal step distance
X, and the vertical axis represents the relative height h between the original point and the endpoint of the gradient direction.
4. Engineering Case Analysis
The project supported by this test is the Lushan Tunnel Project shown in
Figure 14. The Lushan Tunnel is located in Fuyang, Hangzhou City, Zhejiang Province. It is a section of the newly-built Huhang Railway. The main surrounding rock grade is Grade V, and the area sections that need to collect point cloud data for flatness detection are mainly concentrated in the initial support section of the tunnel. A total of 30-m-long section areas are collected. The mileage section is DK109+870~DK109+900, whichever is selected The 2 m part is used as the analysis object of this experiment. The parameters of some regional sections of the Lushan Tunnel Project are shown in
Table 3.
The experiment uses a three-dimensional laser scanner to scan the surface of the initial support of the tunnel and collect the point cloud data of the surface of the initial support of the tunnel in a section of the area. After the point cloud data is preprocessed, the surface point cloud data of the initial support of the tunnel is curved and smoothed by the programming method to obtain the final flatness calculation datum. The normal vector distance is obtained according to the datum plane, to calculate and analyze the flatness of the initial support surface of the tunnel.
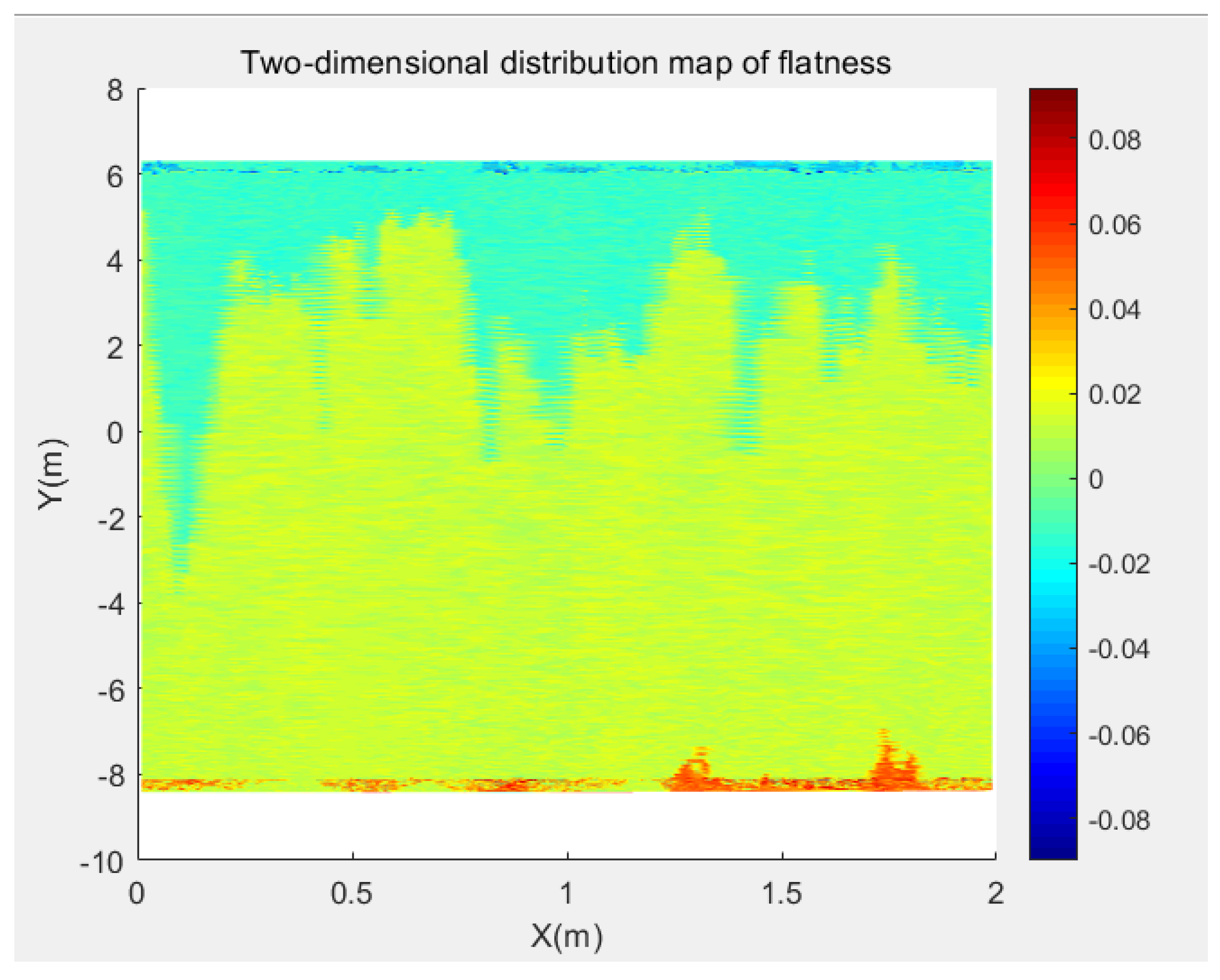
4.1. Analysis of Overall Flatness
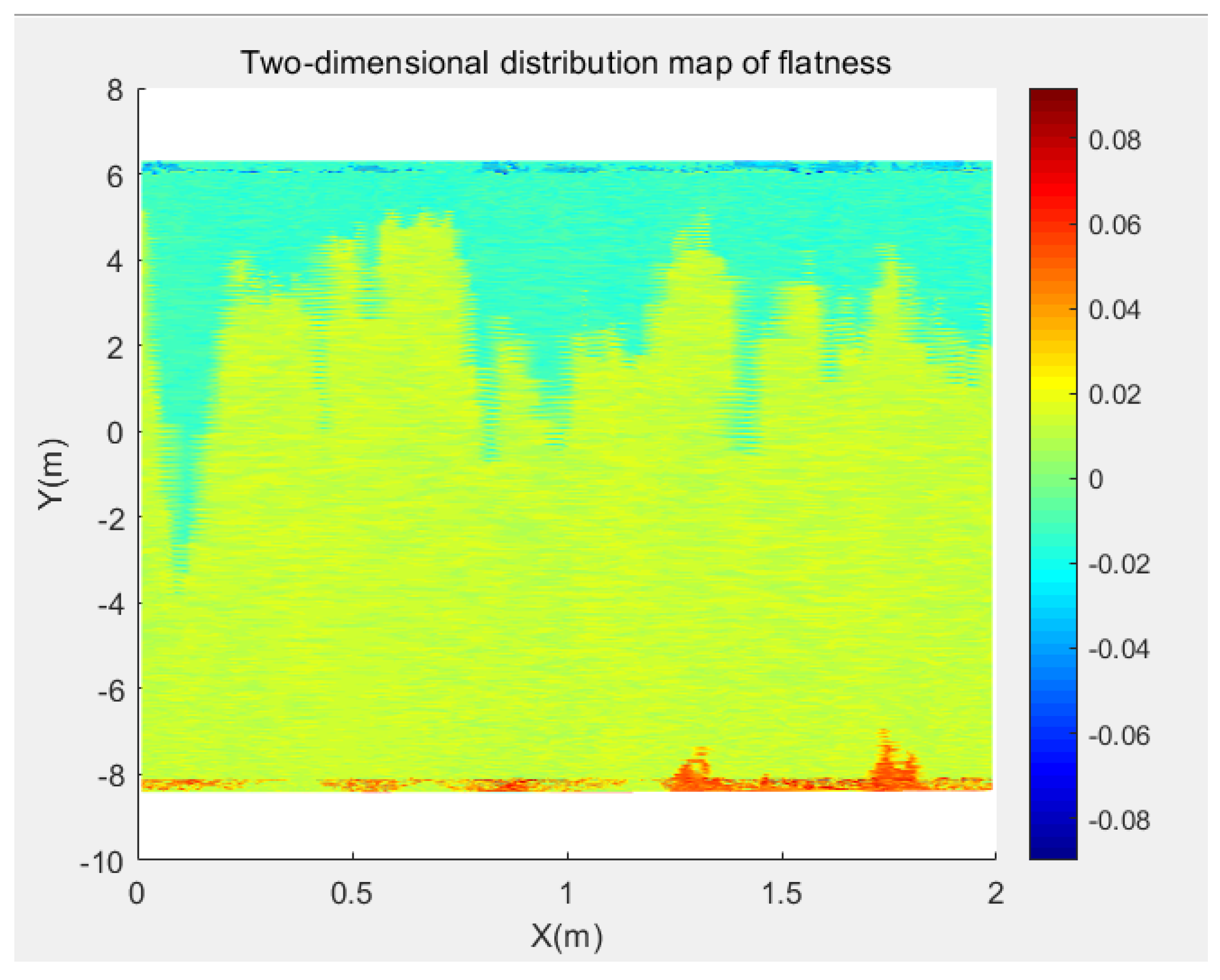
In the experiment, the point cloud data of a 2-m-long tunnel surface cross-section was taken along the direction of the central axis of the tunnel. After preprocessing the point cloud data, a total of 40,000 points are selected by random sampling, and their normal vector distance is calculated, and a 200 × 200 normal vector distance scalar matrix is formed at the same time. Then, through the coordinates of the point cloud data, there are one-to-one correspondence in the
X-axis central axis direction and the
Y-axis cross-sectional direction. Finally, the normal vector distance scalar matrix is colored into a graph to analyze the overall flatness of the tunnel surface, as shown in
Figure 15.
According to the calculation formula for the overall flatness of the surface of the initial support of the tunnel, the overall flatness of the surface of the first support of the tunnel is 19.9 mm. According to the “GB-T 50299-2018 Construction Quality Acceptance Standard for Underground Railway Engineering” [
33], the flatness of the sprayed concrete is allowed the deviation should be 30 mm, and the overall flatness of the initial support surface of the tunnel meets the requirements of the specification.
4.2. Analysis of Local Flatness
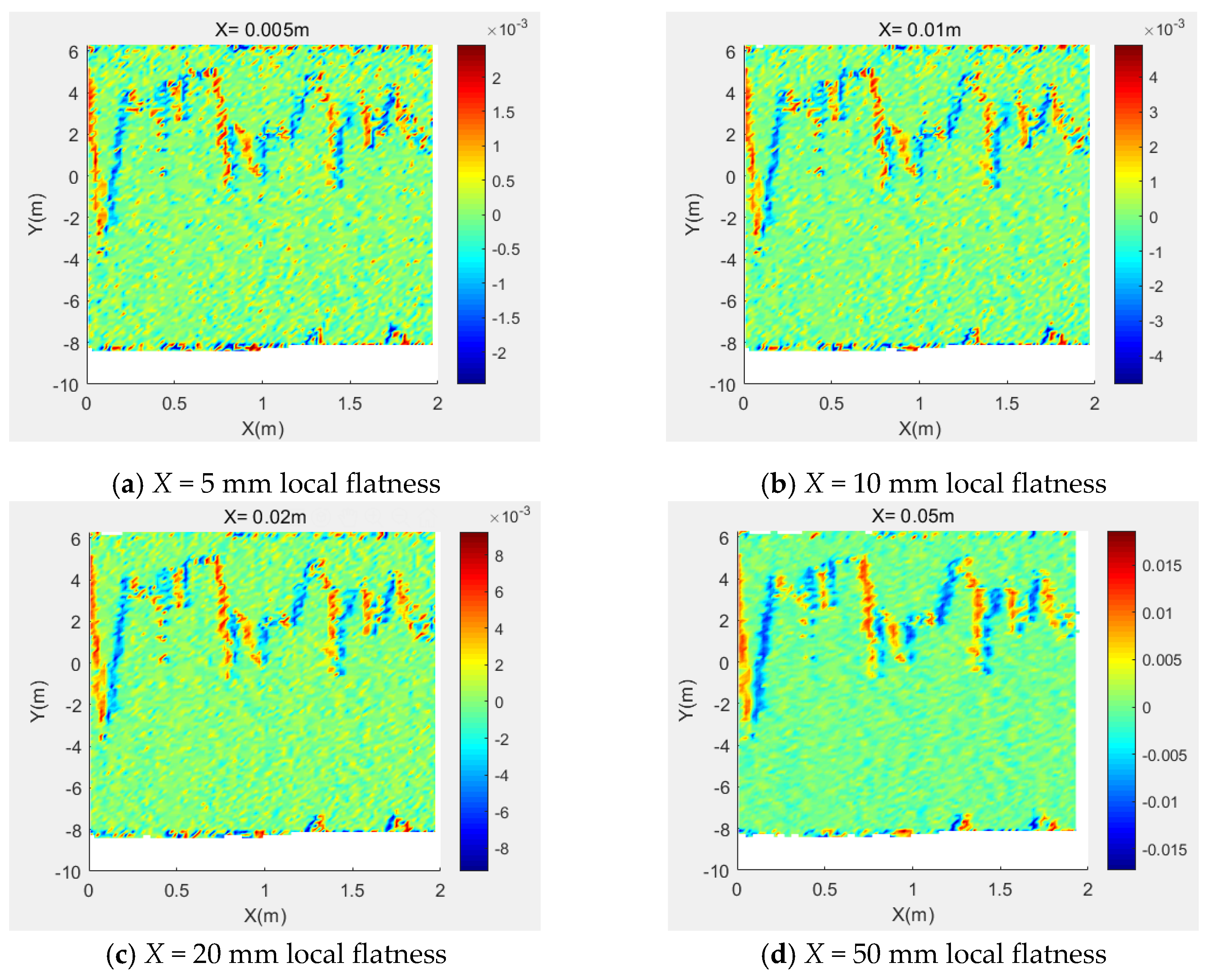
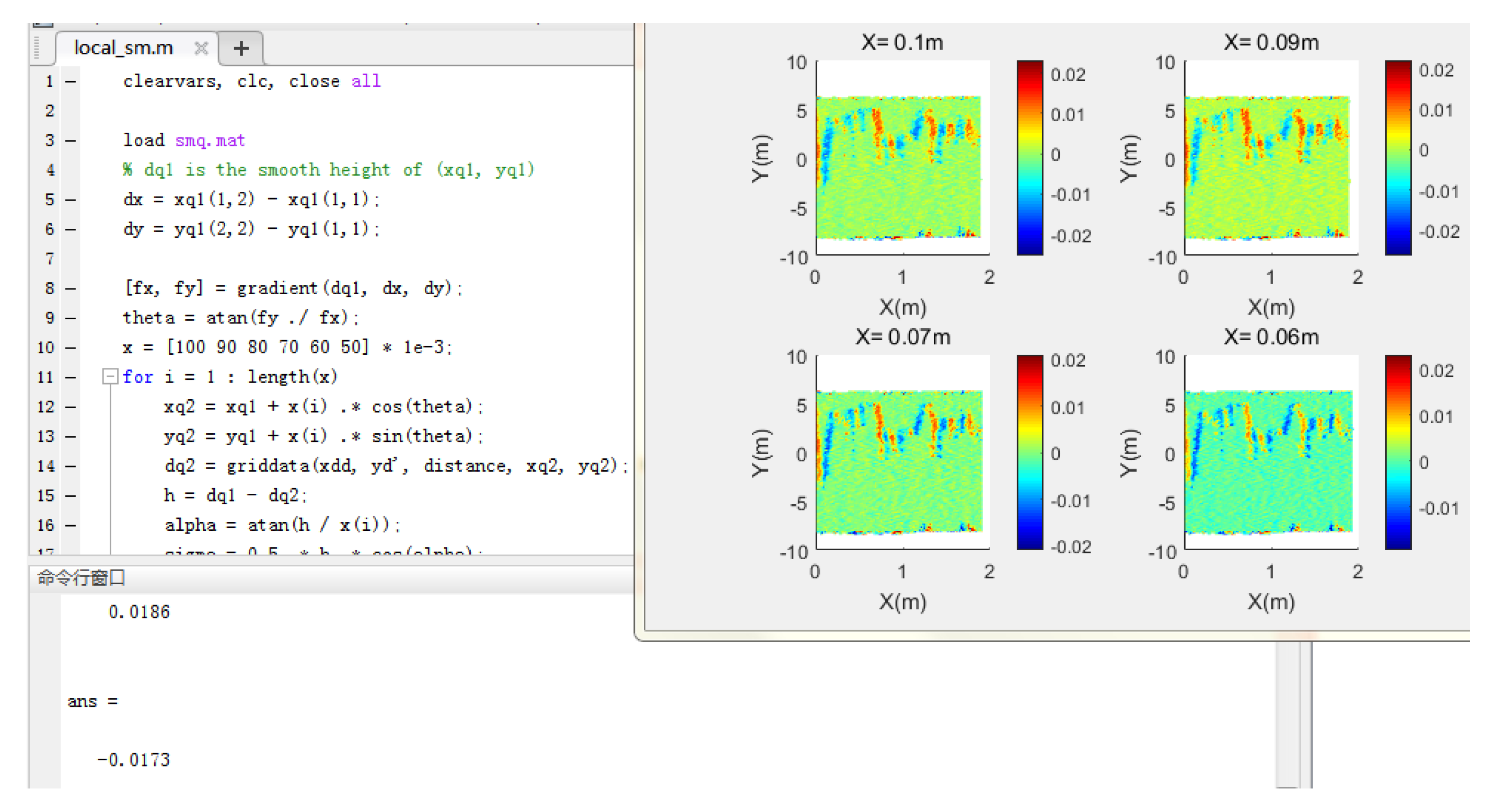
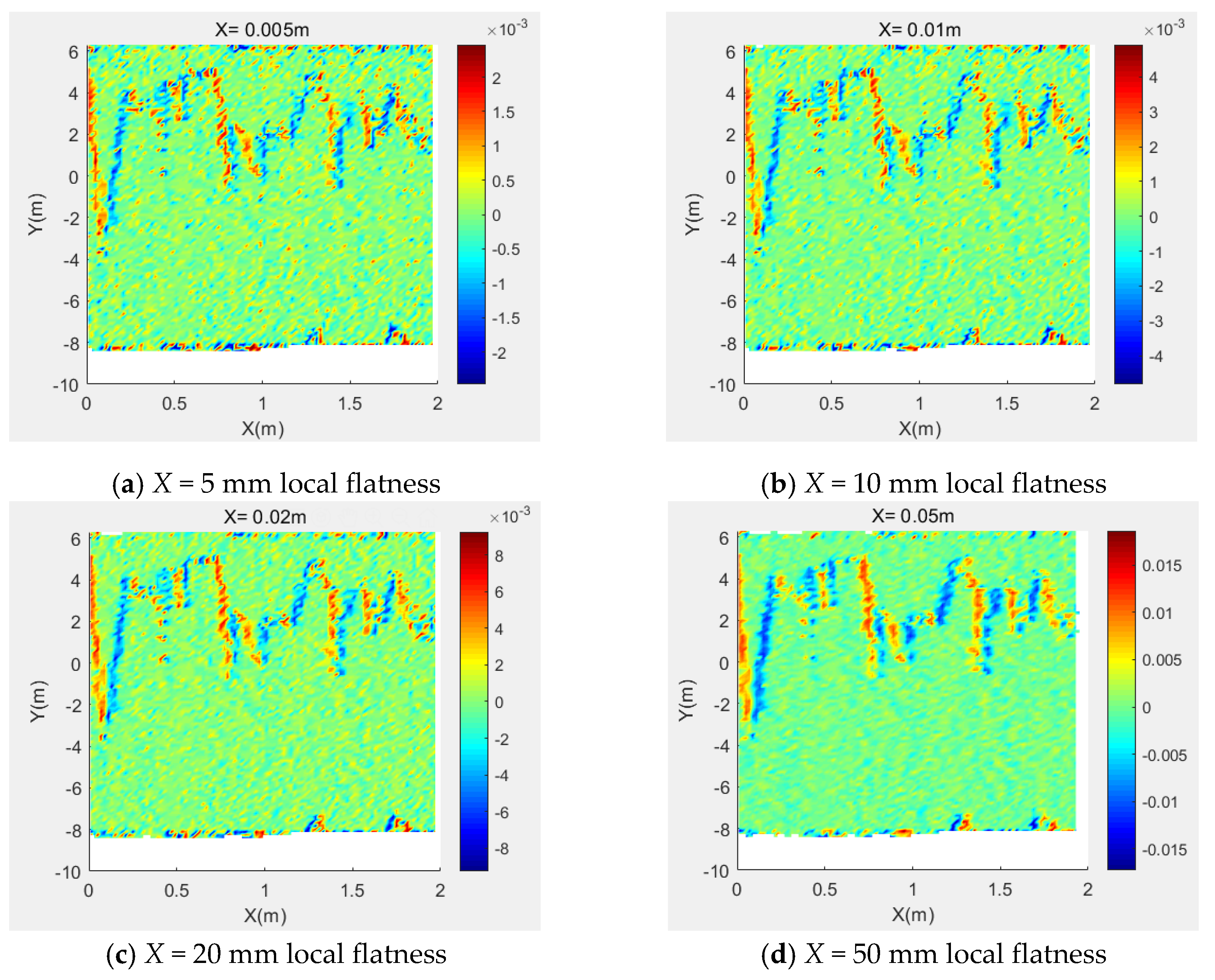
The analysis of local flatness first draws a flatness distribution map through the normal vector distance, and each point in the figure obtains the gradient of each point according to the gradient formula. In the gradient direction, the flatness changes the fastest. The local flatness is calculated in the gradient direction, and the local flatness is calculated and analyzed by determining the value of the horizontal distance X in the gradient direction. After the value of the horizontal distance X is determined, the height difference h between the starting point and the endpoint can be obtained, and X and h can be substituted into the local flatness calculation formula to obtain the final local flatness.
In this experiment, to analyze the influence of the value of the horizontal distance x on the local flatness results of the initial support surface of the tunnel, four-parameter values of
X = 5 mm,
X = 10 mm,
X = 20 mm, and
X = 50 mm were taken to determine the local flatness. The calculation and analysis of flatness are shown in
Figure 16. In the figure, the
X-axis is along the central axis of the tunnel, and the
Y-axis is the direction of the cross-section of the tunnel.
Through the calculation of the local flatness of the initial support surface of the tunnel, when X = 5 mm, the maximum local flatness is 2.5 mm and the minimum is −2.5 mm; when X = 10 mm, the maximum local flatness is 4.9 mm and the minimum When X = 20 mm, the maximum local flatness is 9.3 mm and the minimum is −9.3 mm; when X = 50 mm, the local flatness maximum is 18.6 mm and the minimum is −17.3 mm.
The traditional flatness detection of the initial support of the tunnel is to detect the flatness of the initial support of the tunnel by a combination of a two-meter ruler and a wedge feeler. During the inspection, place the two-meter ruler horizontally on the tunnel surface along the direction of the central axis of the tunnel. The ruler is close to the tunnel surface and finds the largest gap. Place the wedge-shaped feeler gauge here. The reading is the ruler datum plane and the initial support of the tunnel. The maximum gap distance of the protective surface is the flatness of the initial support surface of the tunnel [
34]. According to the “GB-T 50299-2018 Construction Quality Acceptance Standard for Underground Railway Engineering”, the allowable deviation of the flatness of the shotcrete should be 30 mm, and the local flatness of the initial support surface of the tunnel for the four sets of data meets the requirements of the specification.
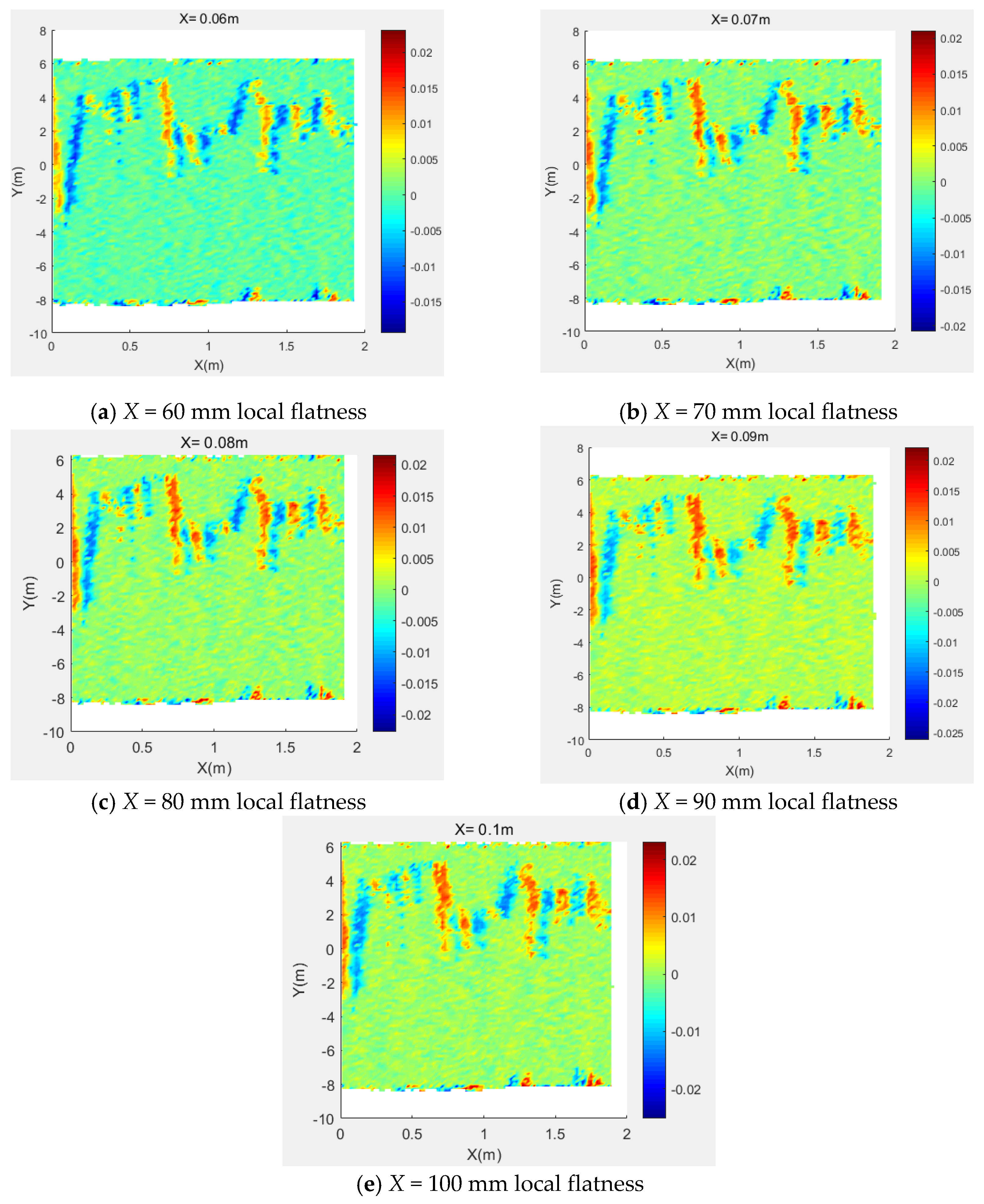
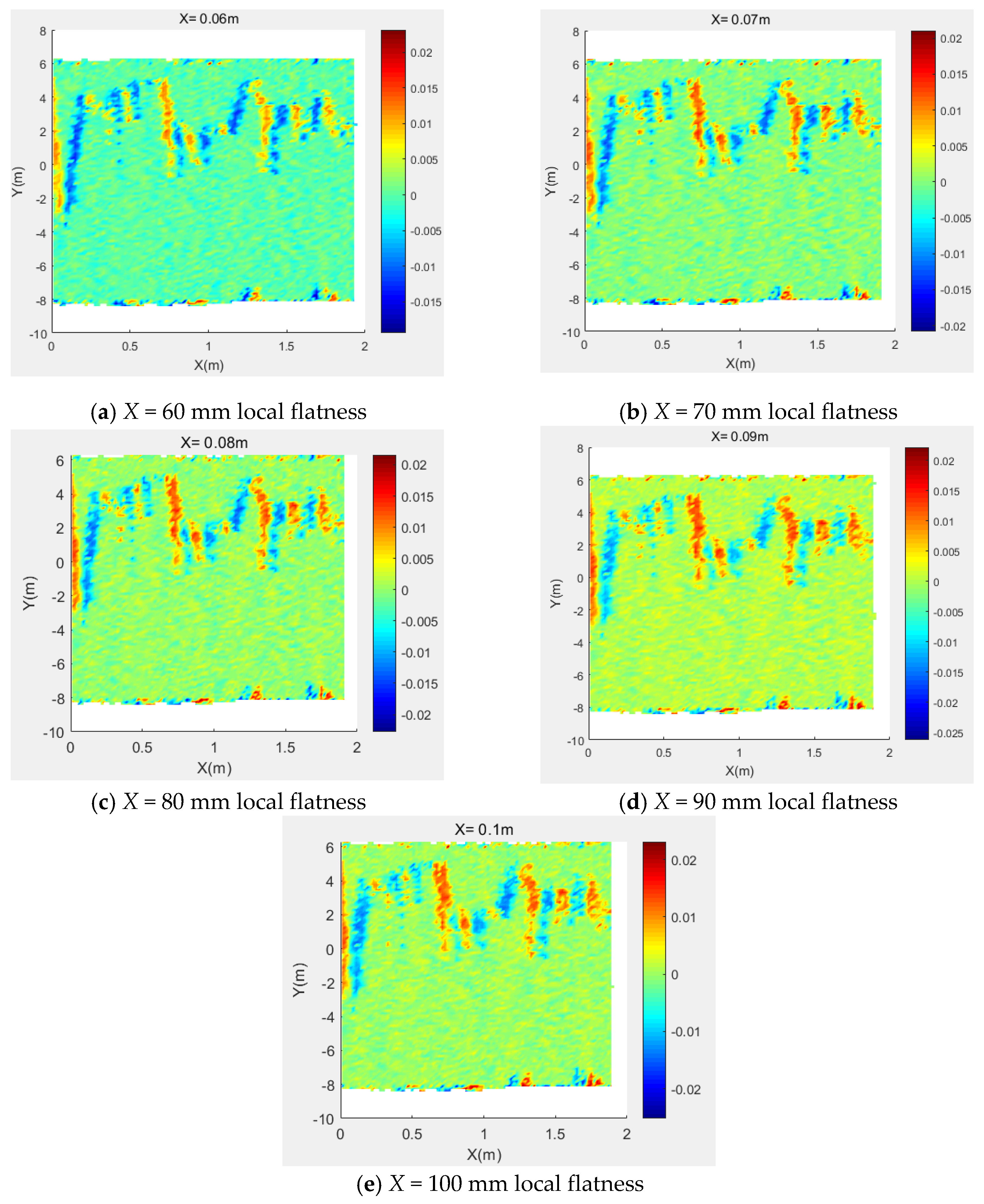
When the value of
X gradually increases, the local flatness value of the initial support surface of the tunnel also gradually increases. At the same time, when the value of X gradually increases, the local flatness value also tends to stabilize. To further determine when the local flatness tends to be stable, this paper adds five sets of variable test data
X = 60~100 mm, as shown in
Figure 17. In the figure, the
X-axis is along the central axis of the tunnel, and the
Y-axis is the direction of the cross-section of the tunnel.
It can be seen from the two sets of test data that the horizontal distance
X has a greater impact on the calculation of local flatness. The results of overall flatness and local flatness are summarized, as shown in
Table 4 below.
The following conclusions can be drawn from the analysis of the above table and the flatness distribution graph: (1) The calculation of local flatness depends on the program setting parameter step distance X. Choosing a suitable step distance parameter is very important for local flatness detection. When the value of X becomes larger and larger, the value of local flatness becomes larger and larger, and its value will approach the upper limit, which is similar to the calculation result of overall flatness. The approximate interval of the advance distance X is between 70 mm~90 mm, and it can be preliminarily judged that the Dangmai advance distance parameter setting between 70 mm~90 mm is suitable for local flatness detection. (2) By comparing and analyzing the flatness of the local flatness distribution map and the overall flatness distribution map, the flatness distributions of the two are basically the same. It can be explained that the detection methods of the overall flatness and the local flatness affect the flatness of the initial support of the tunnel. The representations are the same and the two have commonality. At the same time, the surface flatness of the initial support of the tunnel in this area meets the specification requirements. The local flatness calculation formula based on three-dimensional laser scanning proposed in this experiment is feasible.
4.3. Feasibility Analysis
To verify the effectiveness and feasibility of the method of detecting the surface flatness of the initial branch of the tunnel based on the 3DLS technology, this study compares and analyzes the point cloud data detected by the total station and the point cloud data detected by the 3DLS technology. The tunnel mileage K107+780, K107+785, K107+790, and K107+795 are, respectively, taken from four cross-section information, and each cross-section is taken from the left and right arch bottom, left and right arch waist, and the position of the archtop. The points were measured 4 times with a three-dimensional laser scanner at the same time interval. The thickness of the difference between the monitoring point and the design section collected by the total station is recorded as
d1, and the thickness of the difference between the monitoring point and the design section collected by 3DLS is recorded as
d2, and the statistical results of the test data collected by the two measuring instruments are summarized, as shown in
Table 5 below.
It can be seen from the data in the tab that the detection value collected by 3DLS is roughly the same as the detection value collected by the total station. To further illustrate the accuracy and effectiveness of the flatness detection method based on the 3DLS technology, this study will the detection value of the total station is regarded as the most reliable value
. and the detection value of the scanner is regarded as the observation value
xi. The detection difference
of 4 tests can be calculated respectively, and finally the median error
of 3DLS can be calculated by the detection difference
. The error
in the calculated observation value can represent the true error of 3DLS. The Medium error result is shown in
Table 6.
It can be seen from Table.6 that the true error of the 3DLS will increase as the distance between the section and the station increases. The cross-sectional instrument method, total station coordinate method or 3DLS method can be used, and the error in the measurement should not be greater than 25 mm [
35]. Because the selection of the initial section of the tunnel in this study is a cross-sectional area of 2 m in the direction of the central axis By default, the center position of the cross-sectional area is the position of the measuring station, so the distance between the instrument and the scanned cross-section has little effect on the flatness detection results of this study. The true error of the 3DLS meets the requirements of the specification within a certain measurement range. The accuracy of the point cloud data collected by the 3DLS is improved.
5. Conclusions
This paper is based on the three-dimensional laser scanning technology to obtain the point cloud data of the initial support surface of the railway tunnel, and expounds the use of the tunnel point cloud data, through the B-spline interpolation method and the S-G smoothing method based on the curvature limitation, to obtain the flatness calculation reference plane. The normal vector distance formed by the intersection of the normal line drawn from the original point cloud and the flatness calculation datum plane is proposed, and the normal vector distance is used as the basis for flatness calculation, and two concepts based on the detection of the surface flatness of the initial support of the tunnel are introduced: the whole Flatness and local flatness. Through the analysis of the flatness distribution map and the flatness calculation results, the feasibility of the application of the three-dimensional laser scanning technology in the surface flatness detection of the initial support of the tunnel engineering is verified and discussed. The main conclusions are as follows:
(1) Compared with the traditional total station method and the two-meter ruler method in the traditional flatness detection, the efficiency is low, the accuracy is not high, and the operation is inconvenient. The use of three-dimensional laser scanning technology to detect the surface flatness of the initial support of the tunnel can quickly and accurately obtain the tunnel. A large amount of point cloud data on the surface of the initial support is easy to operate, without touching the surface of the initial support of the tunnel to be tested, and the accuracy of the instrument is high enough to make up for the problem of acquisition accuracy.
(2) Common surface fitting methods include meshing method, Poisson surface reconstruction method, Lagrangian interpolation method, and cubic B-spline interpolation method. To obtain the most suitable surface fitting method for this experiment, the experiment compares and analyzes the surface fitting degree and fitting accuracy of the four surface fitting methods. According to the comparative analysis, compared with the other three surface fitting methods, the tunnel surface constructed by the cubic B-spline interpolation method is continuous and complete, with higher smoothness, no local mutations, etc., and the details of the local area are rich and relatively The tunnel surface is restored well. At the same time, by calculating the statistical root mean square error of the four fitting methods, the fitting error of the surface area other than the original point can be obtained. The calculation result can be obtained by using the Poisson reconstruction method and the cubic B-spline interpolation method. The point cloud fitting error can be kept within a small range, and the fitting accuracy is high. Comprehensive comparative analysis shows that cubic B-spline interpolation is the most suitable fitting method for this study.
(3) After comparative analysis, a suitable surface fitting method for this experiment, namely cubic B-spline interpolation, has been obtained. On this basis, this research puts forward the method of two-way slice complementarity in the B-spline interpolation method to fit the overall surface of the tunnel and the method of SG filter smoothing based on curvature, which effectively eliminates the one-way slice to fit the whole tunnel. The jagged layering effect of the curved surface optimizes the fitting process of the tunnel curved surface. The optimized fitting surface is continuous and complete, with high smoothness, rich and complete local details, which is consistent with the actual engineering situation, and better restores the tunnel surface. At the same time, it can also meet the requirements of the flatness calculation of the initial support of the tunnel. It can be used as a reference plane for flatness calculation.
(4) The intersection of the normal line drawn from the original point cloud and the flatness calculation datum forms the normal vector distance. Based on this, this research proposes two flatness calculation methods and draws the flatness distribution map. The calculation of overall flatness can determine the overall flatness of the initial support surface of the tunnel, and the calculation of local flatness can determine the specific location of the uneven area. Combined with the flatness distribution map, the flatness detection can be more accurate and intuitive, which can be used for tunnel engineering. The construction provides technical support and theoretical guidance.
(5) In the flatness calculation method, this research proposes a local flatness calculation method. The step distance X set by the program is the main factor affecting the local flatness. In the flatness detection of the actual tunnel engineering, it is necessary to set an appropriate stepping distance X according to actual engineering conditions. To explore and analyze the influence of step distance X on local flatness, this study set up experimental groups with different step distance X to conduct analysis. The results show that the local flatness will increase as the step distance X increases. Finally, Infinite approaches the upper limit, which is roughly stable at around 20 mm, which is roughly the same as the overall flatness calculation result. According to the analysis of the flatness distribution map obtained by the two flatness calculation methods, the flatness of the initial tunnel support surface is basically consistent, which proves that the tunnel flatness detection method proposed in this study is feasible.
(6) Through the comparative analysis with the traditional flatness detection method, the true error of 3DLS meets the specification requirements within a certain measurement range, and both are less than the 25 mm required by the specification. This shows the accuracy of the point cloud data collected by 3DLS. At the same time, the initial fitting surface fitting of the tunnel project obtained by 3DLS technology has a higher degree of optimization and is closer to the actual engineering situation. The flatness calculation method is simpler and more effective, and the flatness analysis based on the flatness distribution map is more Precise and intuitive. The method of detecting the flatness of the initial support surface of the tunnel based on the three-dimensional laser scanning technology is feasible.
In summary, compared with traditional detection methods, 3DLS are faster and more accurate, with high acquisition accuracy, wide range, and simple operation in the detection of the flatness of the initial support surface of the tunnel. The surface fitting effect is best after cubic B-spline interpolation and SG filter smoothing based on curvature limitation. In this study, the normal vector distance is formed by the intersection of the normal line drawn from the original point cloud and the flatness calculation datum surface, and based on this, the concepts of overall flatness and local flatness are proposed, and corresponding flatness distribution maps are drawn respectively. The size of the local flatness will increase as the step distance X becomes larger, and finally, approach the calculation result of the overall flatness infinitely. Comparing the measurement accuracy of 3DLS and the traditional detection instrument, and comparing the flatness distribution map and the calculation results, it can be preliminarily concluded that the tunnel flatness detection method proposed in this study is feasible.
6. Outlook
The flatness detection method in this study is mainly for curved surfaces similar to the tunnel surface. For the traditional flatness detection methods, flatness detection can only be performed on relatively flat road surfaces or building walls. Through the research of the flatness detection method in this experiment, the purpose of flatness detection on a complex curved surface is realized. However, there are still some shortcomings in the research process:
(1) Obtaining the flatness calculation datum plane in the tunnel flatness detection calculation is a key step in calculating the flatness of the initial support of the tunnel, but how to determine that the flatness calculation datum obtained by processing is the most suitable and optimal solution flatness calculation datum plane, its treatment method is still worthy of further study.
(2) At this stage, there is no system for systematic evaluation of the flatness detection of the initial branches of the tunnel using 3DLS technology, so the construction of a more complete 3DLS tunnel flatness detection and evaluation system is the next research direction.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}