Simulation Methodology-Based Context-Aware Architecture Design for Behavior Monitoring of Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Background
2.1. DEVS Formalism
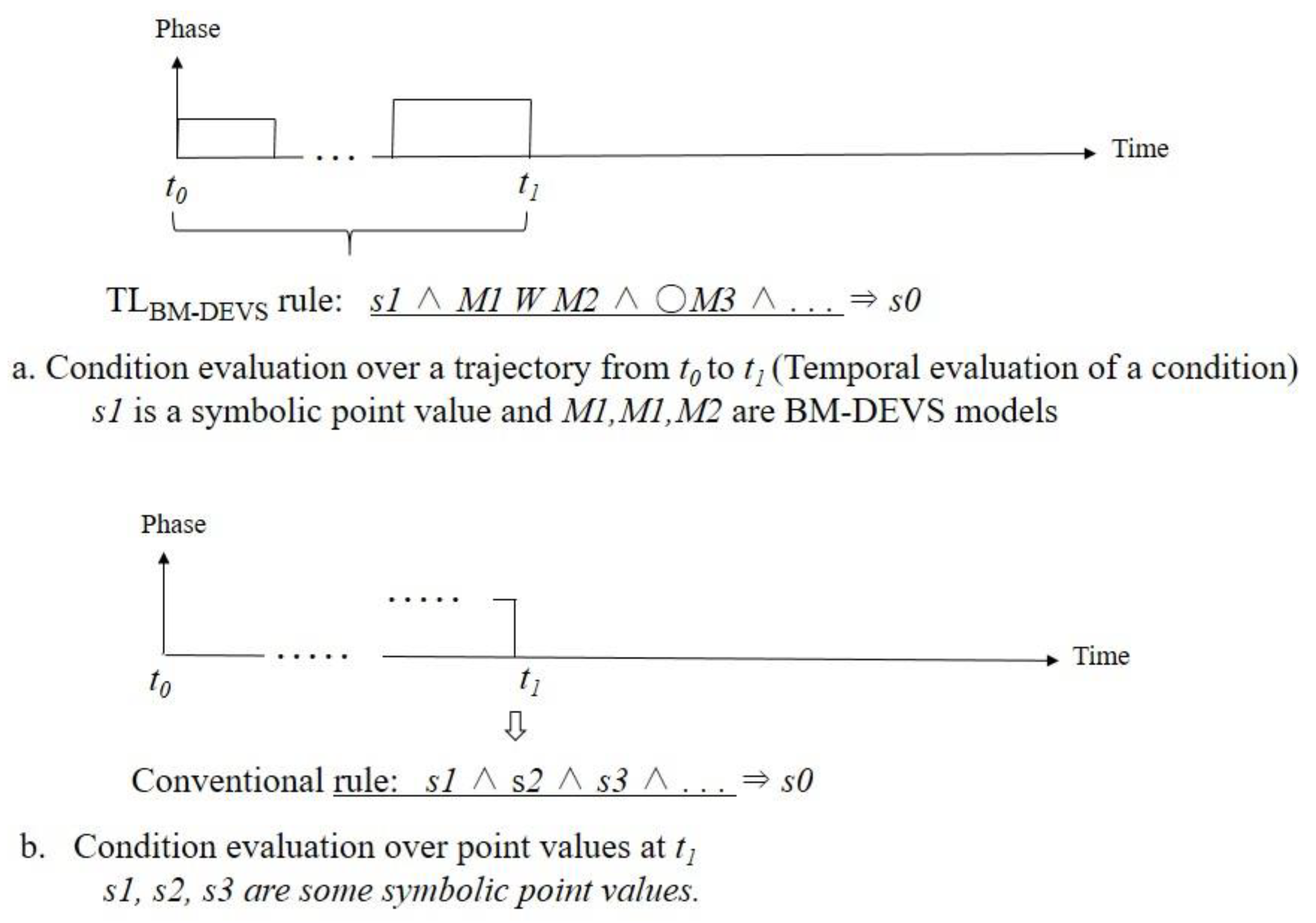
2.2. TL (Temporal Logic)
3. BM-DEVS Formalism
3.1. BM-DEVS Structure
3.2. Evaluation of TLBM-DEVS Rules
3.2.1. Description of Phase Values in a Coupled Model and the Done-Messages in an IEBM-DEVS
3.2.2. Algorithm for the Inference Engine Part of the BM-DEVS Abstract Simulator
| Algorithm 1. Algorithmic description for IEBM-DEVS | |
| 1 | repeat//start the abstract simulator with temporal evaluation on the TLBM-DEVS rules |
| 2 | if receive done-message(pd, t) then |
| 2 | //done-message is issued by a component model that has just gone through a phase change |
| 4 | //pd is a phase value of the component model d, t is the current simulation time |
| 5 | if pd ≠ nil then//IEBM-DEVS is invoked |
| 6 | cm = cm + ○//advance the cm (current moment) by one, initially cm = 0, ○ is the next moment |
| 7 | update {pd}//update the phase values of all the component models |
| 8 | if AB = ’() then |
| 9 | determine AB from B based on {pd} and p (or CM.p) |
| 10 | //CM.p is the phase of this model CM |
| 11 | //AB (set of active rules: a set of rules whose conditions are true up |
| 12 | to the current time point.). B a set of all the rules of this model. AB is a subset of B. |
| 13 | //true condition: the trajectory patterns in the condition of the rules |
| 14 | match that of the component models and this model |
| 15 | else |
| 16 | update every ab.s where ab∈AB |
| 17 | //make state transitions on every ab∈AB with ab::δ and {pd} and p |
| 18 | //ab::δ is a state transition function of ab |
| 19 | end if |
| 20 | if any ab.f has reached then//ab.f is a final state of ab |
| 21 | p = Zf,p//start a new phase p of this CM, |
| 22 | //Zf,p is a translation function that maps a final state of rule ab to a CM’s phase |
| 23 | set AB = ’( ) |
| 24 | cm = 0 |
| 25 | end if |
| 26 | end if //end of if pd ≠ nil |
| 27 | { |
| 28 | … |
| 29 | //Same as the execution of a classic DEVS abstract simulator part w/o the |
| 30 | IEBM-DEVS involved. |
| 31 | //Executed for both done(p, t) and done(nil, t) cases. The classic DEVS |
| 32 | abstract simulator does not distinguish between these two done messages. |
| 33 | … |
| 34 | } |
| 35 | if p changed then |
| 36 | return done(p, t)//return the phase of this CM to the higher level abstract |
| 37 | simulator, which makes the parent of this CM advance |
| 38 | the current moment ○ by one |
| 39 | else |
| 40 | return done(nil, t) |
| 41 | end if |
| 42 | end if//end of if receive done-message(p, t) |
| 43 | until the end of the simulation//end repeat |
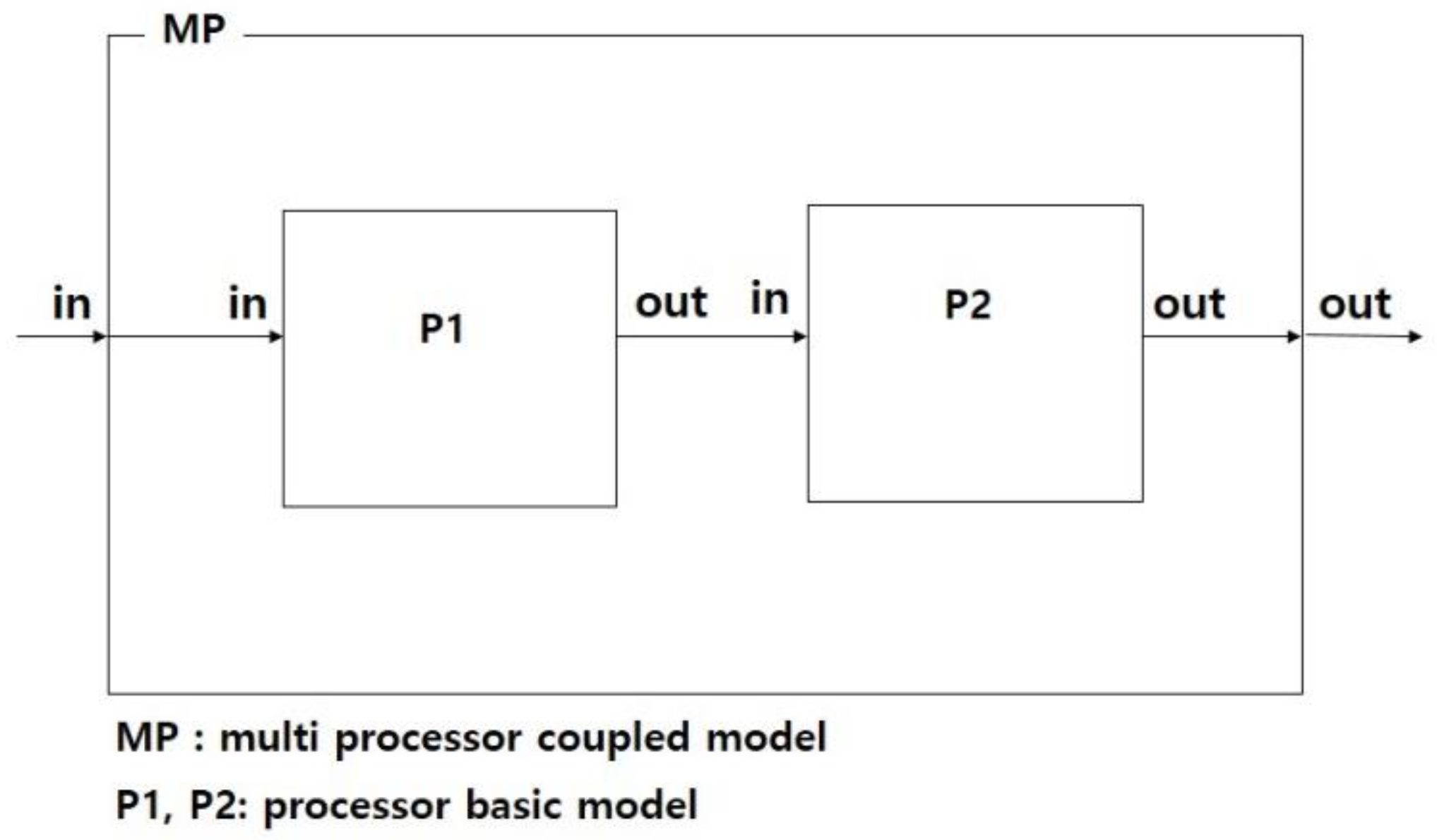
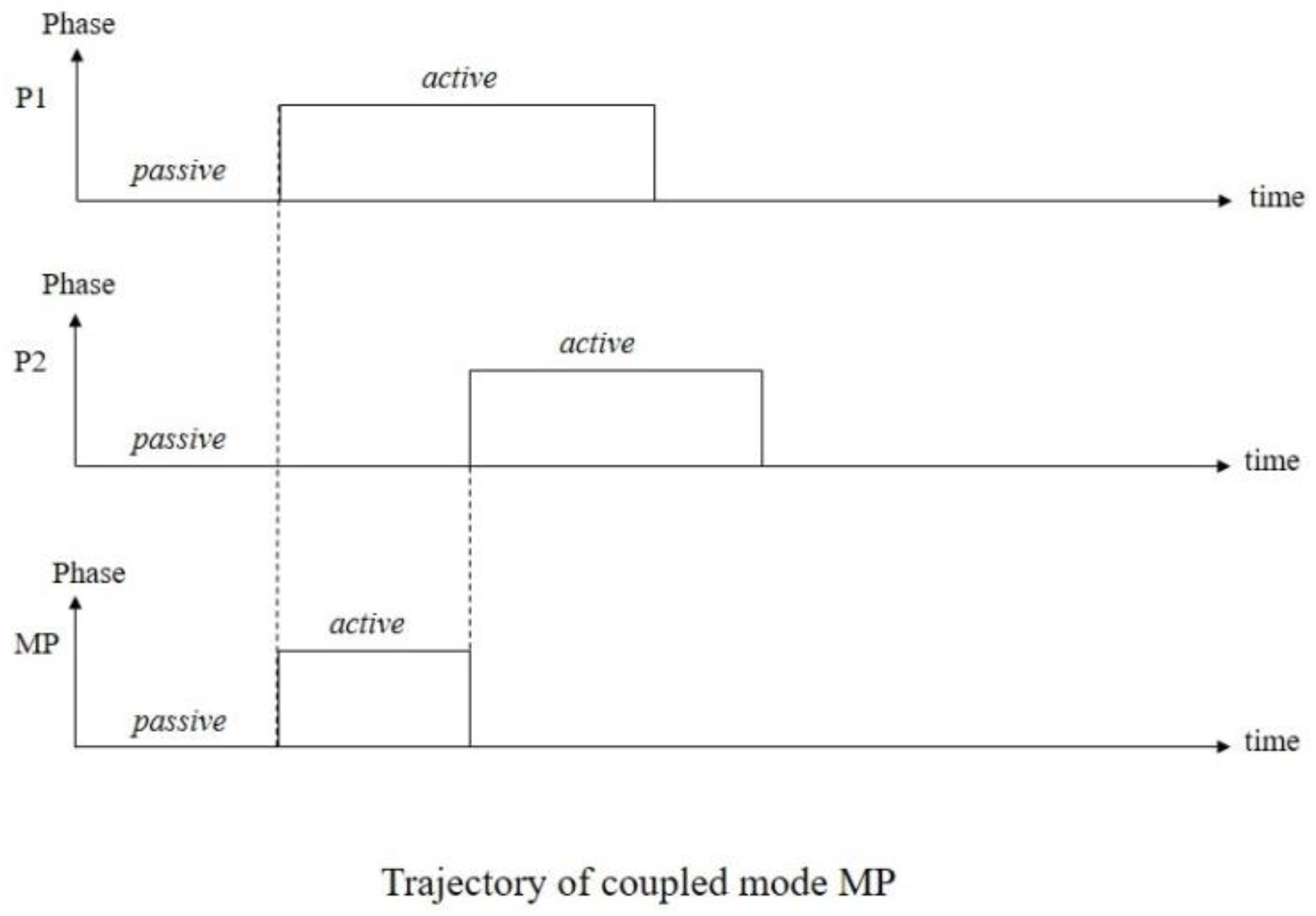
4. Simple Modeling and Simulation Example of the BM-DEVS
4.1. BM-DEVS Model Specification Example
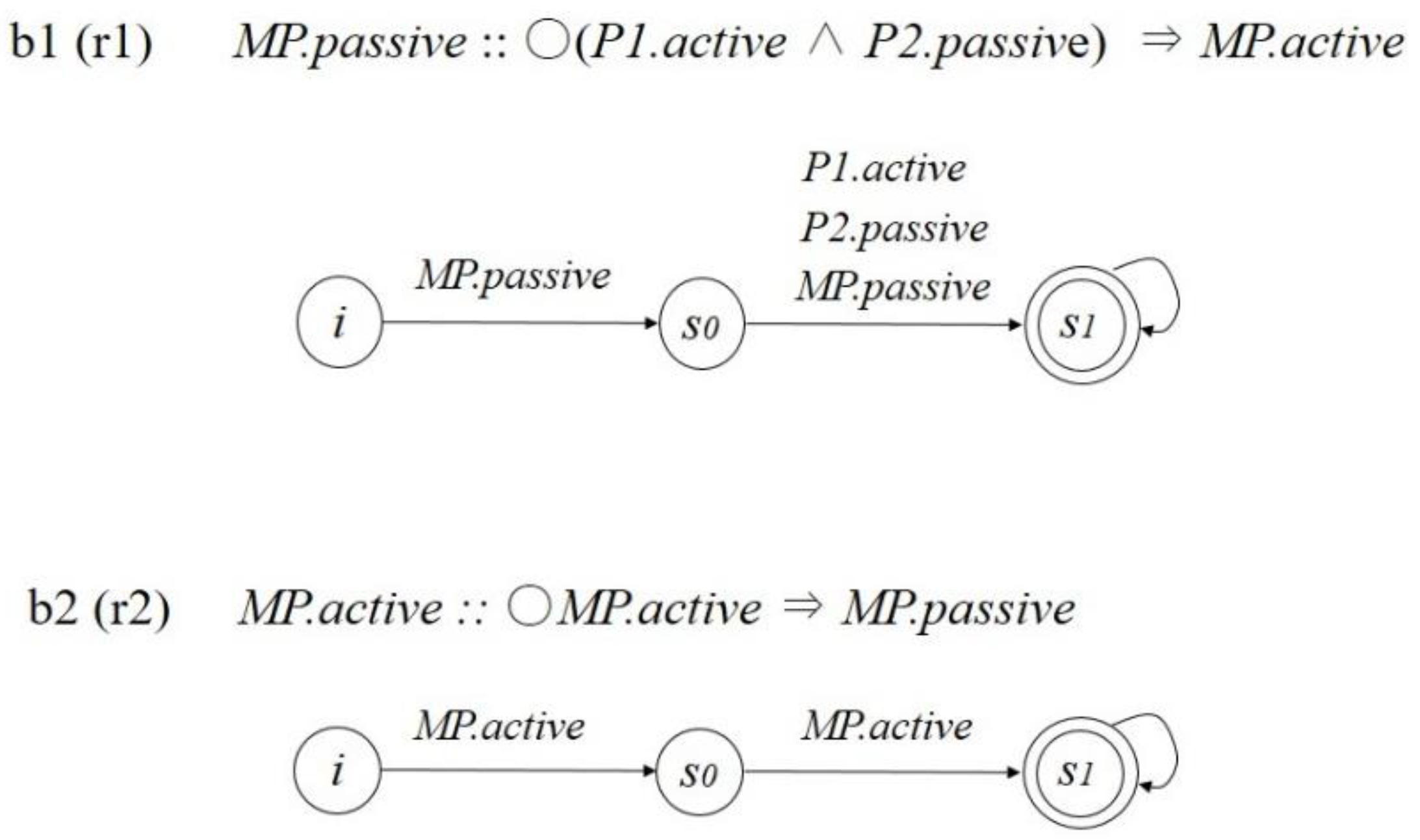
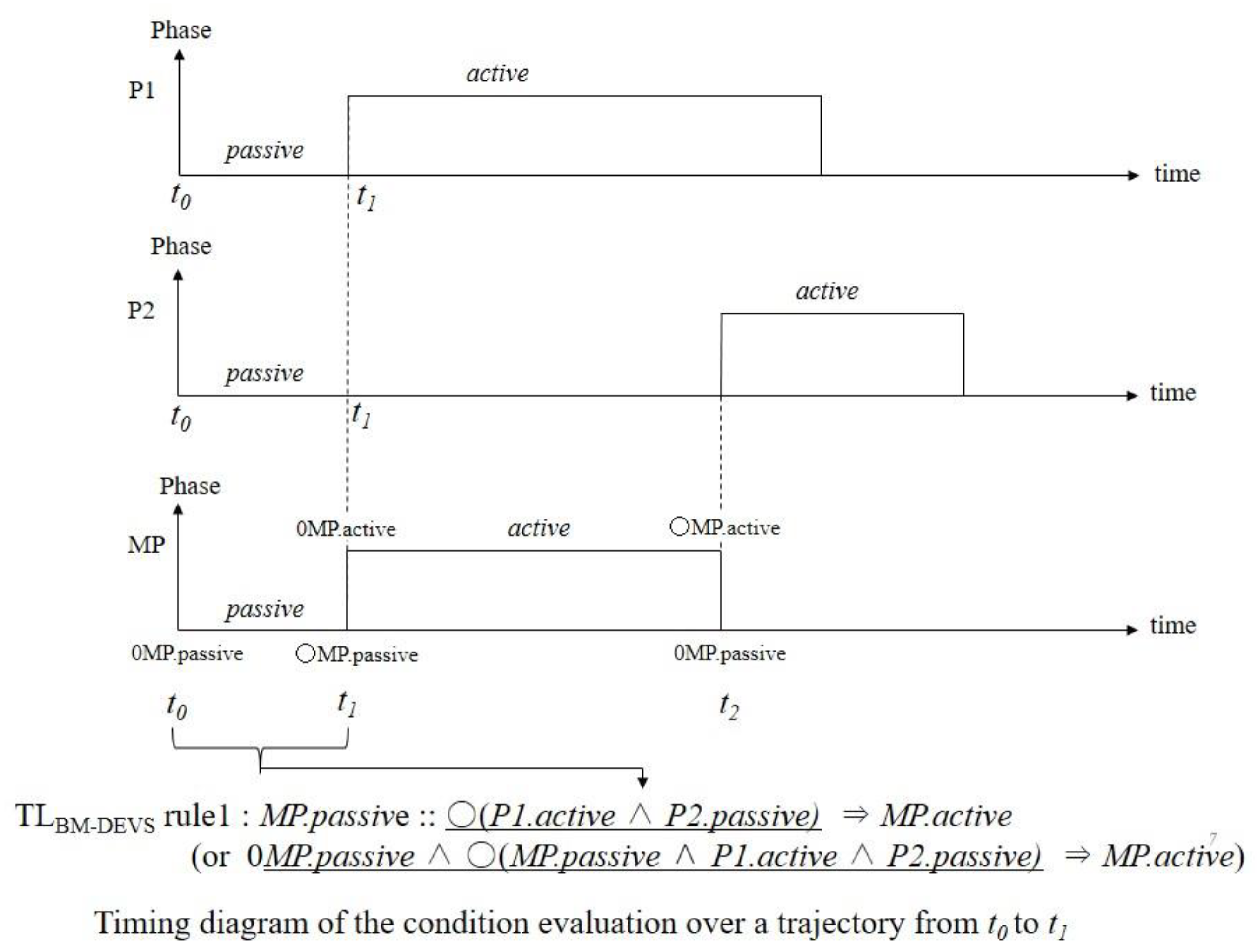
- Rule 1.
- MP.passive :: ○(P1.active ∧ P2.passive) ⇒ MP.active
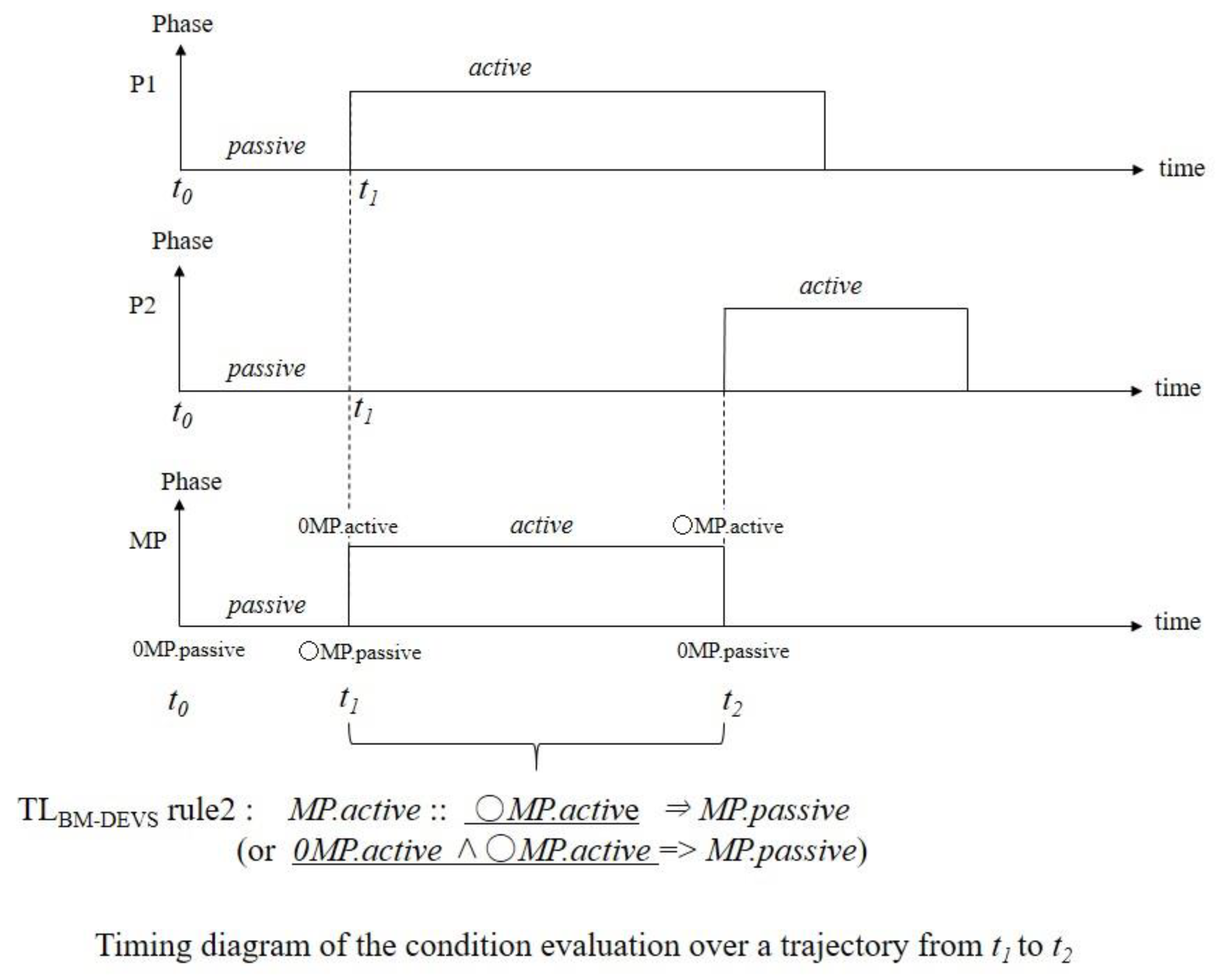
- Rule 2.
- MP.active :: ○MP.active ⇒ MP.passive
4.2. BM-DEVS Abstract Simulator Example
| Execution steps in the abstract simulator C:MP of BM-DEVS | |
| 1 | [Step 1] |
| 2 | Initial values of C:MP—the values before the one-time initial done-messages are |
| 3 | received//C:MP is the abstract simulator for the MP model |
| 4 | {pd} = ’( )//initial phase values of the component models |
| 5 | p = passive//phase of the MP, passive initially otherwise specified |
| 6 | B = {b1.i, b2.i}//set B shows all the members of B with the current state values |
| 7 | AB = ’()//initially none of the automata (rules) of δ activate for b∈B, i.e., b1 and b2 |
| 8 | B’ = {b1.i, b2.i}//set B after execution of δ |
| 9 | Zf,p = {(b1.s1, MP.active), (b2.s1, MP.passive)}//the final state of b1.s1 is identical |
| 10 | to the MP’s active state |
| 11 | [Step 2] |
| 12 | At time 0MP.passive—at initialization time, when initial messages |
| 13 | done(p1.passive, t) and done(p2.passive, t) are received |
| 14 | {pd} = {p1.passive, p2.passive} |
| 15 | p = passive |
| 16 | B = {b1.i, b2.i}//set B shows all the members of B with the current state value |
| 17 | AB = {b1.s0} |
| 18 | B’ = {b1.s0, b2.i}//after execution of δ |
| 19 | Zf,p (b1.s0) => ’()//no change of the MP’s phase because b1.s0 is not a final state |
| 20 | [Step 3] |
| 21 | At time ○MP.passive—when done(p1.active, t) is received |
| 22 | {pd} = {p1.active, p2.passive} |
| 23 | p = passive |
| 24 | B = {b1.s0, b2.i} |
| 25 | AB = {b1.s1}//b1 reached at the accepting state or final state |
| 26 | B’ = {b1.s1, b2.i} |
| 27 | Zf,p (b1.s1) => active |
| 28 | //after executing Z and clearing AB and selecting AB from B |
| 29 | //at time 0MP.active same as ○MP.passive |
| 30 | {pd} = {p1.active, p2.passive} |
| 31 | p = active |
| 32 | B = {b1.i, b2.i} |
| 33 | AB = {b2.s0} |
| 34 | B’ = {b1.i, b2.s0} |
| 35 | [Step 4] |
| 36 | At time ○MP.active—when done(p2.active, t) is received |
| 37 | {pd} = {p1.active, p2.active} |
| 38 | p = active |
| 39 | B = {b1.i, b2.s0} |
| 40 | AB = {b2.s1} |
| 41 | B’ = {b1.i, b2.s1} |
| 42 | Zf,p (b2.s1) => passive |
| 43 | //after executing Z and clearing AB and selecting AB from B |
| 44 | {pd} = {p1.active, p2.active} |
| 45 | P = passive |
| 46 | B = {b1.i, b2.i} |
| 47 | AB = ‘() |
| 48 | B’ = {b1.i, b2.i} |
| 49 | Steps continue until the end of the simulation. |
4.3. Context-Aware Architecture Implementation as a BM-DEVS Application
5. Discussion on BM-DEVS
5.1. Efficiency of BM-DEVS for Behavior Monitoring
5.2. Determination of the Moment Value and Its Duration
5.3. Comparison with Other Context-Awareness Approaches
5.4. Verification of the Validity of BM-DEVS
6. Conclusions and Future Work
Funding
Conflicts of Interest
References
- Jamil, M.S.; Jamil, M.A.; Mazhar, A.; Ikram, A. Ahmed, Smart environment monitoring system by employing wireless sensor networks on vehicles for pollution free smart cities. Procedia Eng. 2015, 107, 480–484. [Google Scholar] [CrossRef]
- Rashid, B.; Rehmani, M.H. Applications of wireless sensor networks for urban areas: A survey. J. Netw. Comput. Appl. 2016, 60, 192–219. [Google Scholar] [CrossRef]
- Vahdat-Nejad, H.; Ramazani, A.; Mohammadi, T.; Mansoor, W. A survey on context-aware vehicular network applications. Elsevier Veh. Commun. 2016, 3, 43–57. [Google Scholar] [CrossRef]
- Baldauf, M. A survey on context-aware systems. Int. J. Ad Hoc Ubiquitous Comput. 2007, 2, 263–277. [Google Scholar] [CrossRef]
- Fang, Q.; Xu, C.; Hossain, M.S.; Muhammad, G. STCAPLRS A spatial-temporal context-aware personalized location recommendation system. ACM Trans. Intell. Syst. Technol. 2016, 7, 59. [Google Scholar] [CrossRef]
- Liu, Z.L.; Liu, Q.; Xu, W.; Liu, Z.; Zhou, Z.; Chen, J. Deep learning-based human motion prediction considering context awareness for human-robot collaboration in manufacturing. Procedia CIRP 2019, 83, 272–278. [Google Scholar] [CrossRef]
- Klimek, R. Behavior recognition and analysis in smart environments for context-aware applications. In Proceedings of the IEEE International Conference on Systems, Man, and Cyberrnetics, Hong Kong, China, 9–12 October 2015. [Google Scholar]
- Hoyos, J.R.; García-Molina, J.; Botía, J.A. A domain-specific language for context modeling in context-aware systems. J. Syst. Softw. 2013, 86, 2890–2905. [Google Scholar]
- Nam, S.M.; Cho, T.H. Context-aware architecture for probabilistic voting-based filtering scheme in sensor networks. IEEE Trans. Mob. Comput. 2017, 16, 2751–2763. [Google Scholar] [CrossRef]
- Zeigler, B.P. Object-Oriented Simulation with Hierarchical, Modular Models: Intelligent Agents and Endomorphic Systems; Academic Press: San Diego, CA, USA, 1990; pp. 41–143. [Google Scholar]
- Zeigler, B.P.; Preahofer, H.; Kim, T.G. Theory of Modeling and Simulation; Academic Press: San Diego, CA, USA, 2000; pp. 75–123. [Google Scholar]
- Fisher, M. An Introduction to Practical Formal Methods Using Temporal Logic; John Wiley & Sons: Hoboken, NJ, USA, 2011; pp. 12–48. [Google Scholar]
- Manna, Z.; Pnueli, A. The Temporal Logic of Reactive and Concurrent Systems: Specification; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Sickert, S.; Esparza, J.; Jaax, S.; Křetínský, J. Limit-deterministic büchi automata for linear temporal logic. In Proceedings of the International Conference on Computer Aided Verification, Toronto, ON, Canada, 17–23 July 2016. [Google Scholar] [CrossRef]
- Büchi, J.R. The Collected Works of J. Richard Büchi; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Sezer, O.B.; Dogdu, E.; Ozbayoglu, A.M. Context-aware computing, learning, and big data in internet of things: A survey. IEEE Internet Things J. 2018, 5, 1–28. [Google Scholar] [CrossRef]
- Mueller, M.; Smith, N.; Ghanem, B. Context-aware correlation filter tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Liu, N.N.; He, L.; Zhao, M. Social temporal collaborative ranking for context aware movie recommendation. ACM Trans. Intell. Syst. Technol. 2013, 4, 15. [Google Scholar] [CrossRef]
- Cho, T.H. Embedding intelligent planning capability to DEVS models by goal regression method. Simulation 2002, 78, 716–730. [Google Scholar] [CrossRef]
- Rakib, A.; Haque, H.M.U.; Faruqui, R.U. A temporal description logic for resource-bounded rule-based context-aware agents. In Proceedings of the International Conference on Context-Aware Systems and Applications, Phu Quoc Island, Vietnam, 25–26 November 2013. [Google Scholar]
- Elfar, M.; Wang, W.; Pajic, M. Context-aware temporal logic for probabilistic systems. arXiv 2007, arXiv:2007.0579. [Google Scholar]







© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cho, T.H. Simulation Methodology-Based Context-Aware Architecture Design for Behavior Monitoring of Systems. Symmetry 2020, 12, 1568. https://doi.org/10.3390/sym12091568
Cho TH. Simulation Methodology-Based Context-Aware Architecture Design for Behavior Monitoring of Systems. Symmetry. 2020; 12(9):1568. https://doi.org/10.3390/sym12091568
Chicago/Turabian StyleCho, Tae Ho. 2020. "Simulation Methodology-Based Context-Aware Architecture Design for Behavior Monitoring of Systems" Symmetry 12, no. 9: 1568. https://doi.org/10.3390/sym12091568
APA StyleCho, T. H. (2020). Simulation Methodology-Based Context-Aware Architecture Design for Behavior Monitoring of Systems. Symmetry, 12(9), 1568. https://doi.org/10.3390/sym12091568