1. Introduction
Chen [
1] served the problem of classifying finite type surfaces in the 3-dimensional Euclidean space
. If its coordinate functions are a finite sum of eigenfunctions of its Laplacian
, a Euclidean submanifold is called of Chen finite type.
Moreover, the notion of finite type may be extended to any smooth function on a submanifold of a Euclidean space or a pseudo-Euclidean space. The submanifolds theory of finite type has been discussed by mathematicians.
Takahashi [
2] obtained that minimal surfaces and spheres are the only surfaces in
satisfying the condition
Ferrandez, Garay, and Lucas [
3] introduced the surfaces of
satisfying
,
are either minimal, or an open piece of sphere or of a right circular cylinder. Choi and Kim [
4] worked the minimal helicoid in terms of pointwise 1-type Gauss map of the first kind.
Dillen, Pas, and Verstraelen [
5] gave the only surfaces in
satisfying
are the minimal surfaces, the spheres and the circular cylinders. Dillen, Fastenakels, and Van der Veken [
6] studied rotation hypersurfaces of
and
Beneki, Kaimakamis, and Papantoniou [
7] worked helicoidal surfaces with spacelike, timelike and lightlike axis in three-dimensional Minkowski space. Senoussi and Bekkar [
8] focused helicoidal surfaces in
which are of finite type in the sense of Chen with respect to the fundamental forms
and
The right helicoid (resp. catenoid) is the only ruled (resp. rotational) surface which is minimal. Hence, we meet Bour’s theorem in [
9]. Do Carmo and Dajczer [
10] proved that, by using Bour [
9], there exists a two-parameter family of helicoidal surfaces isometric to a given helicoidal surface. Güler and Vanlı [
11] worked Bour’s theorem in Minkowski three-space. Using Bour’s theorem in Minkowski geometry, Güler [
12] investigated helicoidal surface with lightlike profile curve. Mira and Pastor [
13] studied helicoidal maximal surfaces in Lorentz–Minkowski three-space.
Lawson [
14] gave the general definition of the Laplace–Beltrami operator. Magid, Scharlach, and Vrancken [
15] introduced the affine umbilical surfaces in
. Hasanis and Vlachos [
16] considered hypersurfaces in 4-space with harmonic mean curvature vector field. Scharlach [
17] studied the affine geometry of surfaces and hypersurfaces in
. Cheng and Wan [
18] considered complete hypersurfaces of four-space with CMC. Arslan, Deszcz, and Yaprak [
19] studied Weyl pseudosymmetric hypersurfaces. Turgay and Upadhyay [
20] considered biconservative hypersurfaces in 4-dimensional Riemannian space forms.
Arvanitoyeorgos, Kaimakamis, and Magid [
21] showed that if the mean curvature vector field of
satisfies the equation
(
is a constant), then
has CMC in Minkowski four-space
.
General rotational surfaces in
were originated by Moore [
22,
23]. Ganchev and Milousheva [
24] considered the counterpart of these hind surfaces in the Minkowski four-space. Kim and Turgay [
25] focused surfaces satisfying
-pointwise 1-type Gauss map in
. Moruz and Munteanu [
26] gave minimal translation hypersurfaces in
Verstraelen, Walrave, and Yaprak [
27] studied minimal translation surfaces in
. Özkaldı et al. [
28] worked LC helix on hypersurfaces in Minkowski space
.
Güler, Magid, and Yaylı [
29] defined helicoidal hypersurface and studied the Laplace–Beltrami operator of the hypersurface in
. Güler, Hacısalihoğlu, and Kim [
30] introduced Gauss map and the third Laplace–Beltrami operator of the rotational hypersurface in
Moreover, Güler and Turgay [
31] studied Cheng–Yau operator and Gauss map using rotational hypersurfaces in four-space. Güler and Kişi [
32] worked Dini-type helicoidal hypersurfaces with timelike axis in Minkowski four-space.
In this paper, we introduce the helicoidal hypersurfaces in Minkowski four-space
. We give some basic notions of the four dimensional Minkowski geometry in
Section 2. In
Section 3, we give the definition of a helicoidal hypersurface with spacelike axis (resp., with timelike axis in
Section 4, with lightlike axis in
Section 5.), then calculate the curvatures of it. We describe the helicoidal hypersurfaces with timelike axis satisfying
in
in
Section 6. Finally, we give some open problems in the last section.
2. Preliminaries
In this section, we introduce the first and the second fundamental forms, matrix of the shape operator Gaussian curvature K, and the mean curvature H of hypersurface in Minkowski four-space . Throughout the paper, we shall identify a vector (a,b,c,d) with its transpose (a,b,c,d)
Let
be an isometric immersion of a hypersurface from
to
where
is an element of length (Lorentz metric) and
are the pseudo-Euclidean coordinates of type
. The vector product of
in
is defined as follows
For a hypersurface
in
, we have
where
e is the Gauss map (i.e., the unit normal vector)
gives the matrix of the shape operator
. Now, we have the formulas of the Gaussian curvature
and the mean curvature
, respectively, as follows
and
A hypersurface
is minimal if
identically on
.
Let be a curve in a plane and ℓ be a straight line in of . A rotational hypersurface in is defined as a hypersurface rotating a curve (profile) around a line (axis) ℓ. When the profile curve rotates around the axis ℓ, it simultaneously displaces parallel lines orthogonal to the axis ℓ, so that the speed of displacement is proportional to the speed of rotation. Resulting hypersurface is called the helicoidal hypersurface with axis ℓ and pitches .
Therefore, we introduce three type of the helicoidal hypersurfaces in throughout next three sections.
3. Helicoidal Hypersurfaces with Spacelike Axis
Supposing
is the line spanned by the spacelike vector
, the orthogonal matrix is given by
where
The matrix
can be found by solving the following equations, simultaneously,
where
When the axis of rotation is
, there is an Minkowskian transformation by which the axis is
transformed to the
-axis of
. A parametrization of the profile curve is given by
where
is a differentiable function for all
. Thus, the helicoidal hypersurface which is spanned by the vector
with pitches
, is
in
where
If
we get helicoidal surface with spacelike axis as in the three dimensional Minkowski space
.
When
, the surface is just a rotational hypersurface with timelike axis:
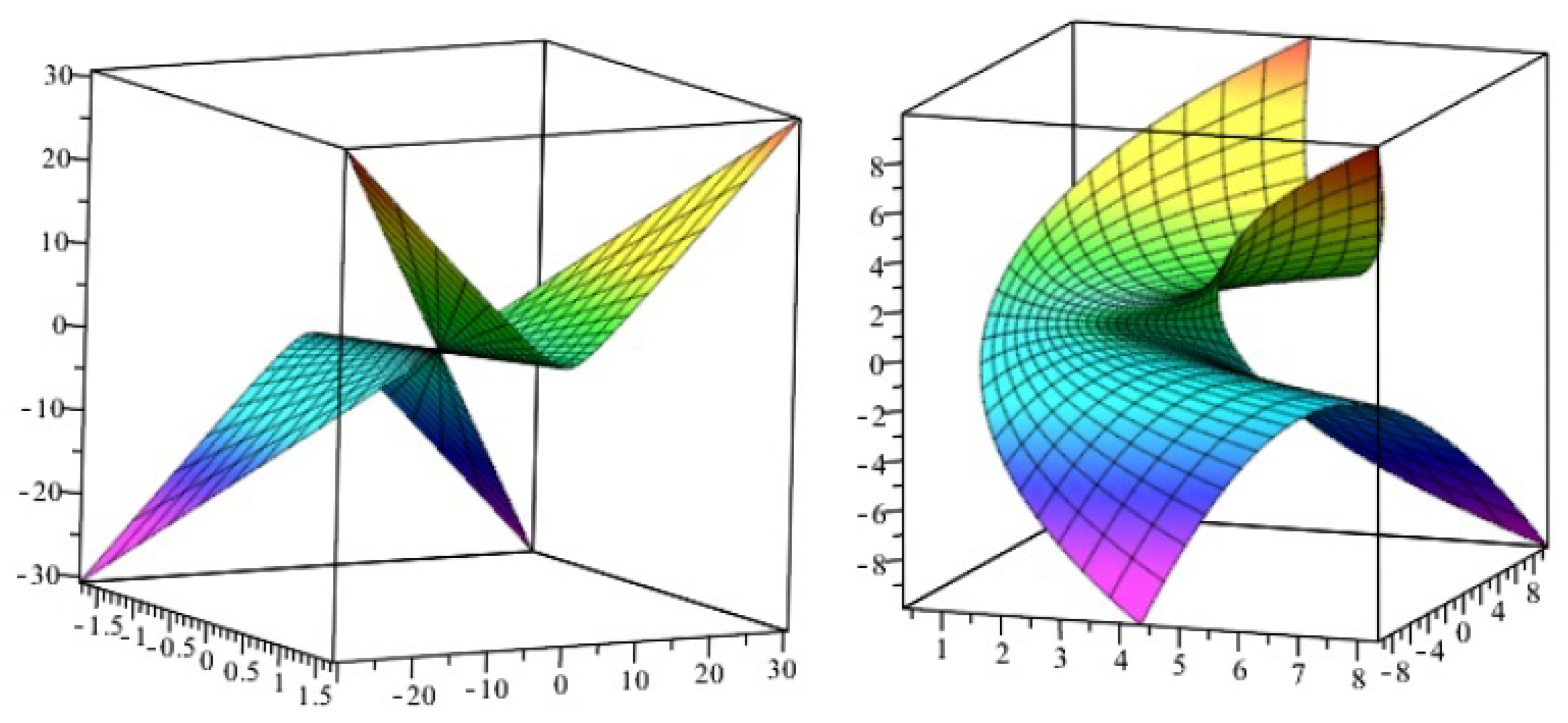
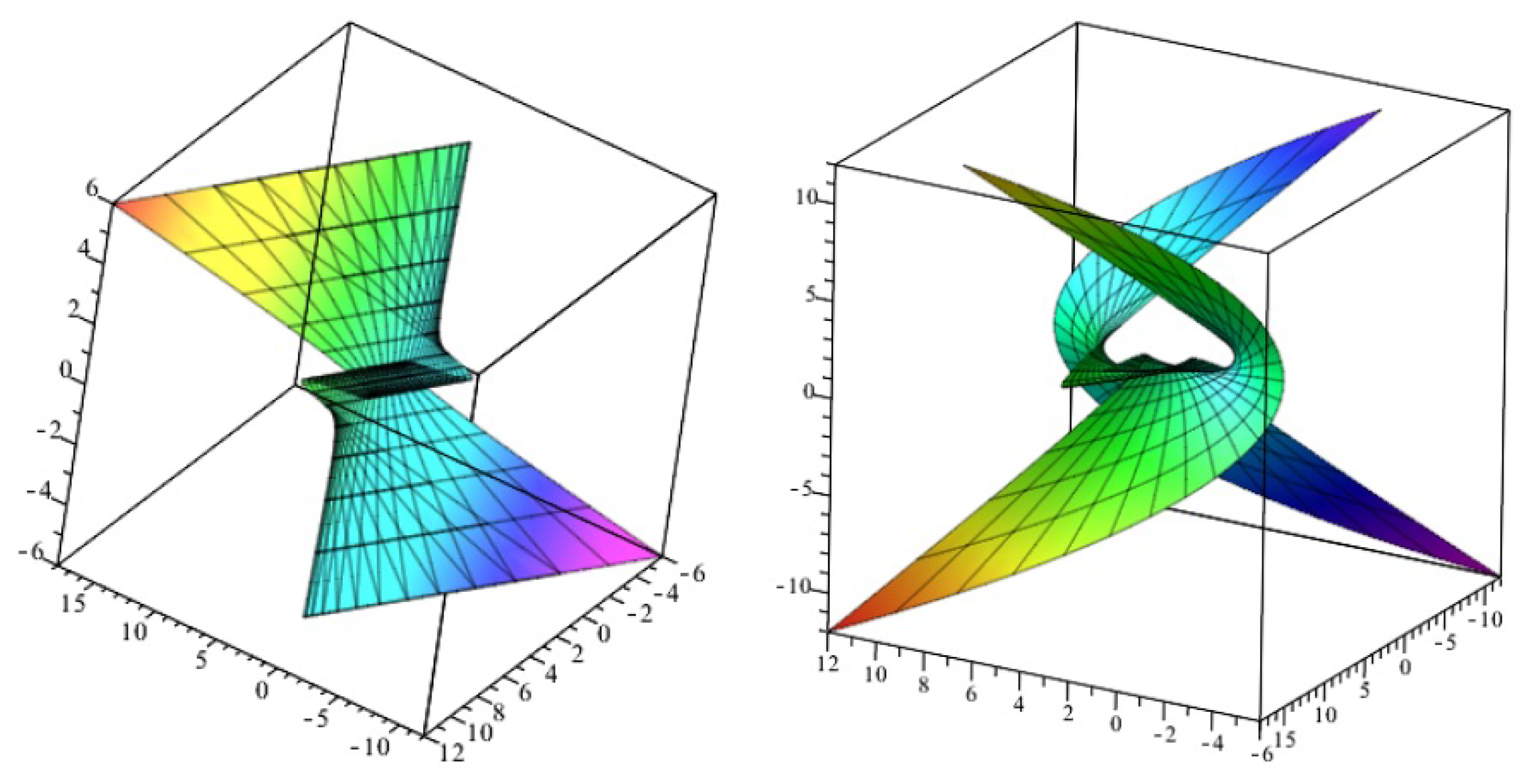
Next, we obtain the curvatures of a helicoidal hypersurface with spacelike axis
where
and
See
Figure 1 and
Figure 2 to projections of
with spacelike axis into three-space.
Computing the first differentials of (1), we get the first quantities as follows
where
Thus, we have
With the second differentials with respect to
we obtain the second quantities as follows
and
Hence, the Gauss map of the helicoidal hypersurface is given by
Finally, we calculate the Gaussian curvature and the mean curvature of the helicoidal hypersurface with spacelike axis and state the results in the following propostion:
Proposition 1. For a helicodal hypersurface with spacelike axis in the Gaussian and mean curvatures, respectively, are as followswhere
Corollary 1. When we get Corollary 2. When and we have
4. Helicoidal Hypersurfaces with Timelike Axis
Taking
is the line spanned by the timelike vector
, the orthogonal matrix is given by
where
The matrix
can be found by
where
When the axis of rotation is
, there is an Minkowskian transformation by which the axis is
transformed to the
-axis of
. Parametrization of the profile curve is given by
where
is a differentiable function for all
. Thus, the helicoidal hypersurface which is spanned by the vector
with pitches
, is as follows
in
where
If
we get helicoidal surface with timelike axis as in the three dimensional Minkowski space
.
When
, the surface is just a rotational hypersurface with timelike axis as follows
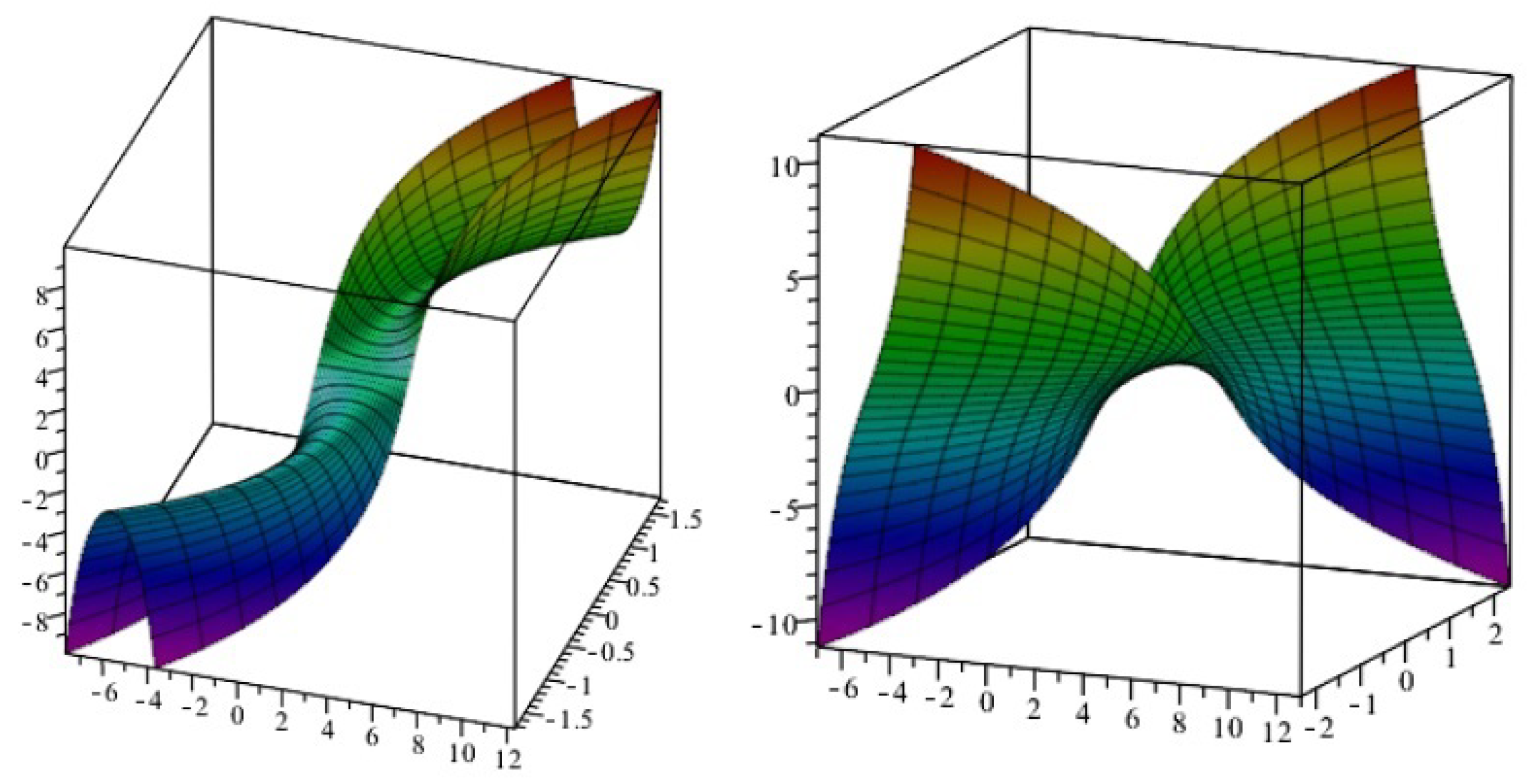
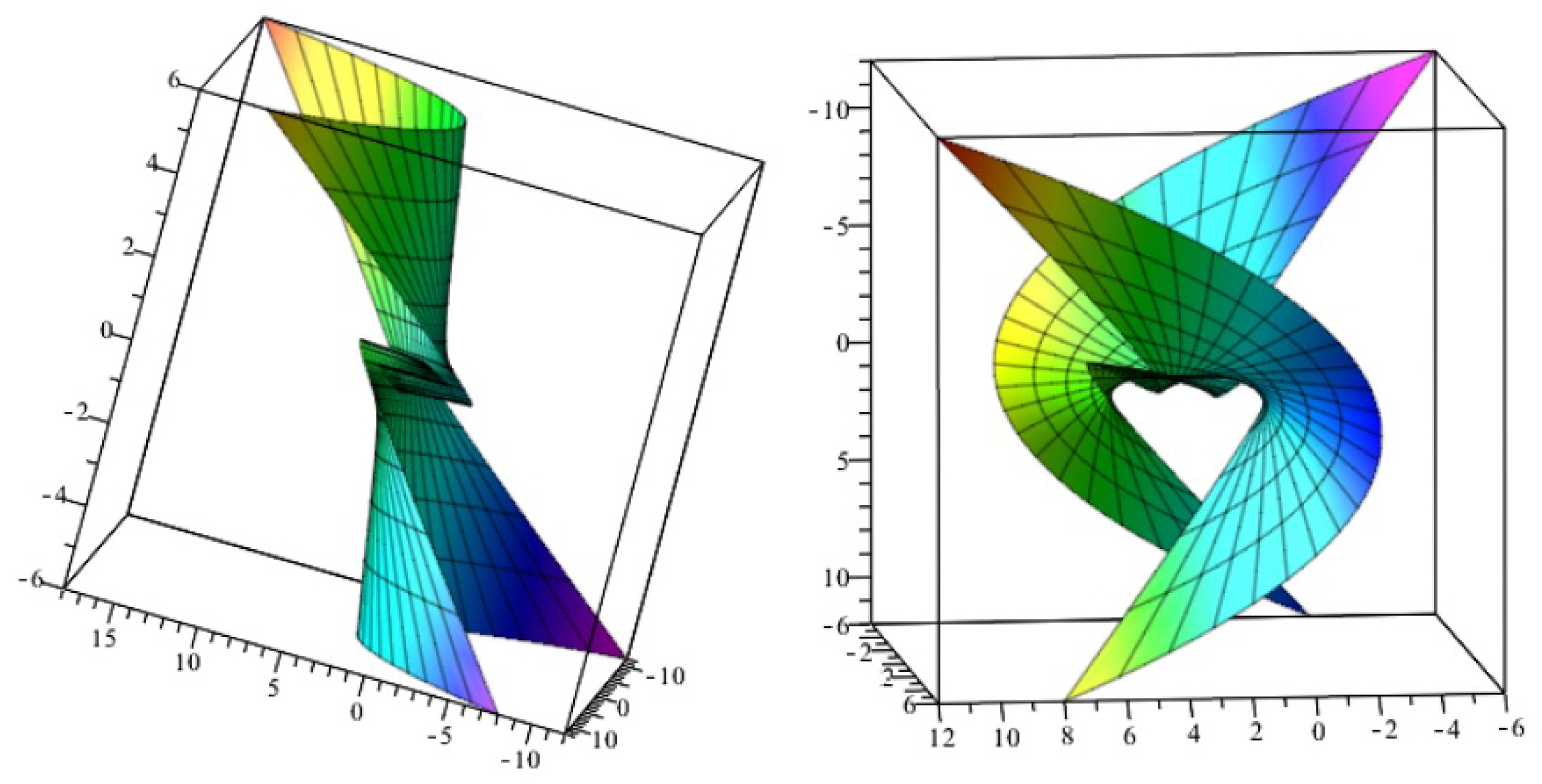
Now, we obtain the mean curvature and the Gaussian curvature of a helicoidal hypersurface with timelike axis
where
and
See
Figure 3 and
Figure 4 to projections of
with timelike axis into three-space.
Computing the first differentials of (2), we find the first quantities
where
Then, we get
With the second differentials with respect to
we have the second quantities
and
Then, the Gauss map of the helicoidal hypersurface is given by
Finally, we calculate the Gaussian curvature and the mean curvature of the helicoidal hypersurface with timelike axis and state the results in the following propostion.
Proposition 2. For a helicodal hypersurface with timelike axis in the Gaussian and mean curvatures, respectively, are as followswhere
Corollary 3. When then we have Corollary 4. When and we have the same situation of Corollary 2, i.e., K and H vanish.
5. Helicoidal Hypersurfaces with Lightlike Axis
Considering
is the line spanned by the lightlike vector
, the orthogonal matrix is given by
where
The matrix
can be found by
where
When the axis of rotation is
, there is an Minkowskian transformation by which the axis is
transformed to the
-axis of
. Parametrization of the profile curve is given by
where
is a differentiable function for all
. So, the helicoidal hypersurface which is spanned by the lightlike vector
with pitches
, is as follows:
in
where
When
we get helicoidal surface with lightlike axis as in the three dimensional Minkowski space
.
When
, the surface is just a rotational hypersurface with lightlike axis as follows
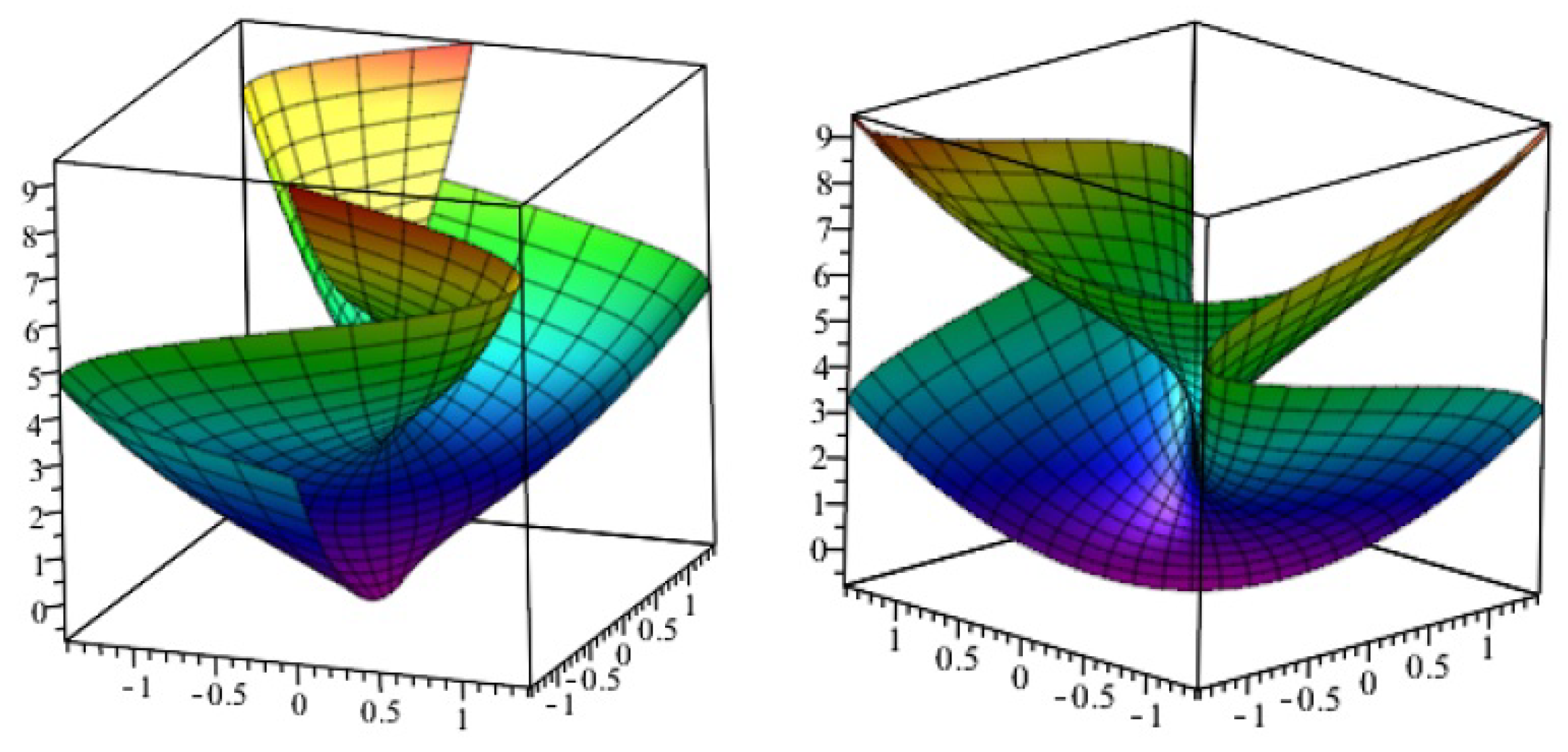
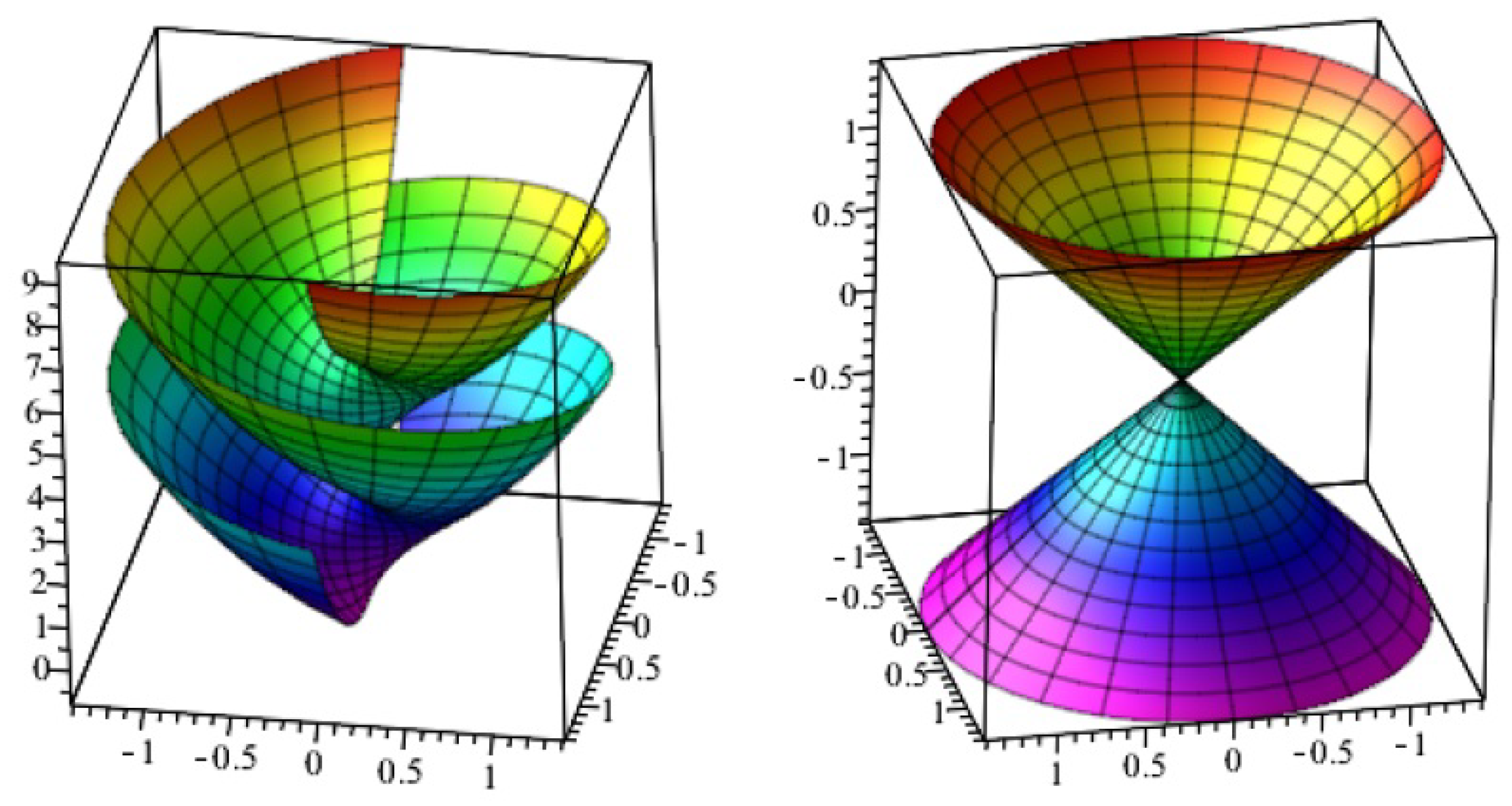
Next, we obtain the curvatures of a helicoidal hypersurface with lightlike axis
where
and
See
Figure 5 and
Figure 6 to projections of
with lightlike axis into three-space.
Calculating the first differentials of (3), we obtain the first quantities
where
Then, we have
With the second differentials with respect to
we have the second quantities
Hence, the Gauss map of the hypersurface is given by
where
Finally, we calculate the Gaussian curvature and the mean curvature of the helicoidal hypersurface with lightlike axis, respectively, as follows
and
We assume that Therefore, the problem now is reduced to finding the solution of this differential equation in , where the function is the known smooth function given.
Next, we will examine Equation (4). Let
, then
and
Hence, (4) reduces to
where
In order to get an idea for these hypersurfaces, we study , and for some special functional forms of the curvatures.
Case 1. Equation (6) takes the form
Suppose that
Then Equation (7) reduces to
The solution of this equation is given by
From Equation (8) we get
Hence, we have
If
, then
and find
Moreover, we define following one-parameter family of curves
Therefore, the equation of these helicoidal hypersurfaces
is given by
where
If
then
and we obtain
Then, we define following two-parameter family of curves
Hence, the equation of these helicoidal hypersurfaces is given by
Finally, we observe that given the function
, we can determine a one or two-parameter family of curves given by (9) or (11), respectively, and define the corresponding Equations (10) or (12) of the helicoidal hypersurfaces with lightlike axis immersed in
Case 2(a). When
and
Equation (6) takes the form
which is satisfied by the function
and therefore
, where
So, given the function
by (13) following the same process there exists a family of helicoidal hypersurfaces
immersed in
the equation of which is
Similarly, when
and
Equation (6) reduces to
Case 2(b). Equation (6) takes the form
which is satisfied by the function
and therefore
, where
So, given the function
by (14) following the same process there exists a family of helicoidal hypersurfaces
immersed in
the equation of which is
Case 2(c). We consider
,
Then we get
Using the substitution
the equation reduces to
We could not compute this equation using analytical methods. It is the future problem for us.
Case 3. Now, we think
such that
for every
So, we can consider the inverse function
. Then, Equation (6) can be written as
Taking
it takes the form
If we do not know some particular solution, we can not get its general solution.
Case 4. The mean curvature of the helicoidal hypersurface given by (3) in the Minkowski space
is given by (5). The problem now is to find the solution of this equation in
, where the function
is the known smooth function given. Since we may give the solution of the equation
we can find the helicoidal minimal hypersurfaces. Taking
then this equation takes the form
where
So, using
it reduces to
Setting
we get
Solution of above equation is
Therefore, we see that
(resp.
) satisfy the following equations:
and
Hence, for every function
which satisfies the last equation, there exists a helicoidal minimal hypersurface with lightlike axis in
whose parametric representation is given by (3).
We were not able to find the solution of Equation (5) by using analytical methods, so, it is for us, an open problem. Nevertheless, one could consider special values for the function
as we did earlier for the function
, and then give solutions of the corresponding equations. For example, if
where
then (5) reduces to
This equation is satisfied by the function
and then
Here, when
then
So, we have
Given the function
by (15), there exists a helicoidal hypersurface with lightlike axis immersed in
the equation of which is given by
Finally, we give the following theorem:
Theorem 1. Let , be a profile curve of the helicoidal hypersurface immersed in given by (3). Then the Gaussian and the mean curvature at the point are functions of the same variable u, i.e., . Moreover, given constants , and a smooth function (resp. ), we define the family of curves (resp. ).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





