Traffic Flow Density Model and Dynamic Traffic Congestion Model Simulation Based on Practice Case with Vehicle Network and System Traffic Intelligent Communication




Abstract

1. Introduction
2. Theory Model for Traffic Flow and Simulation Algorithm
2.1. Introduction to Traffic Flow Theory
2.2. Queuing Theory
2.3. Speed Model Theory
2.4. Vehicle Moving Model
3. Congestion Presentation and Basic Hypotheses
3.1. Introduction to the Basic Hypotheses
- The traffic on each road segment and in each direction is constant, all data are obtained according to the literature, and there will be no changes in the travel area, regardless of the cause of congestion, except for metered and automated traffic through intelligent traffic light systems.
- Periodic limitation conditions are used for the delimitation of directions and road sections for all periods of time in which the simulations take place.
- Intersections are defined and have separate entrances, as well as exits, and are not controlled and limited by signals or thresholds. Everything is based on the set traffic flow, supported by the road segment and the level of reaction of traffic lights, with there being several scenarios with a certain timeframe for free passage.
- The most common case is when a direction of travel is congested, traffic density and flow are behind the road section. If those obstacles cannot be removed in a timely manner, possibly by changing the lane, the blockage becomes total.
- If the vehicle network is guided by programmed systems and communications, such as autonomous vehicles, the congestion parameters will be analyzed in such a scenario, verifying the usefulness of communication systems in the case of cars and intelligent traffic light systems.
3.2. Structure of Traffic Jam
3.3. Representation of Congestion in Traffic Flow
3.4. Flow Distribution for Experimental Area
4. Control Strategy and Potential Solution
4.1. Introduction to Control Strategy
4.2. Simulation Structure of Traffic Flow
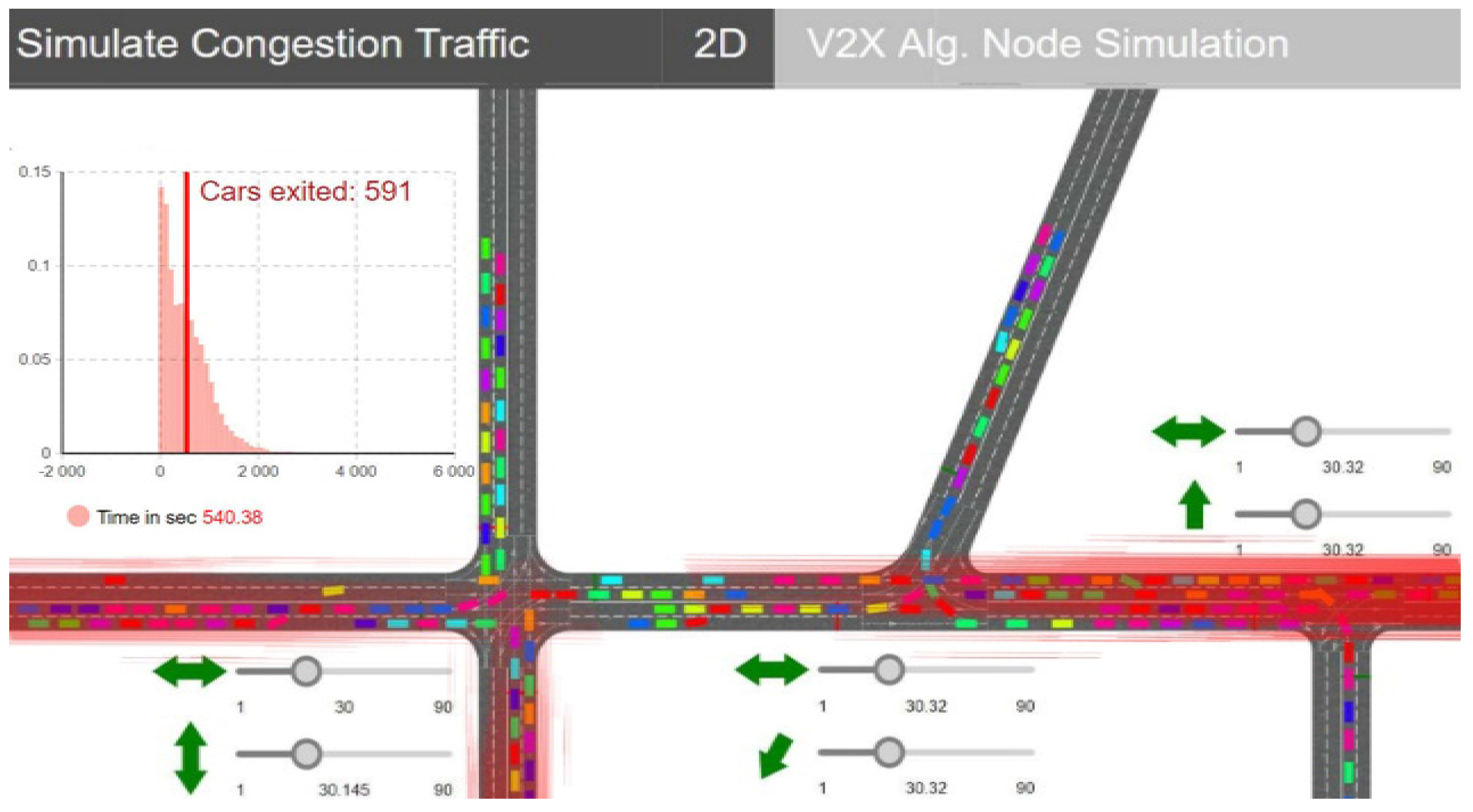
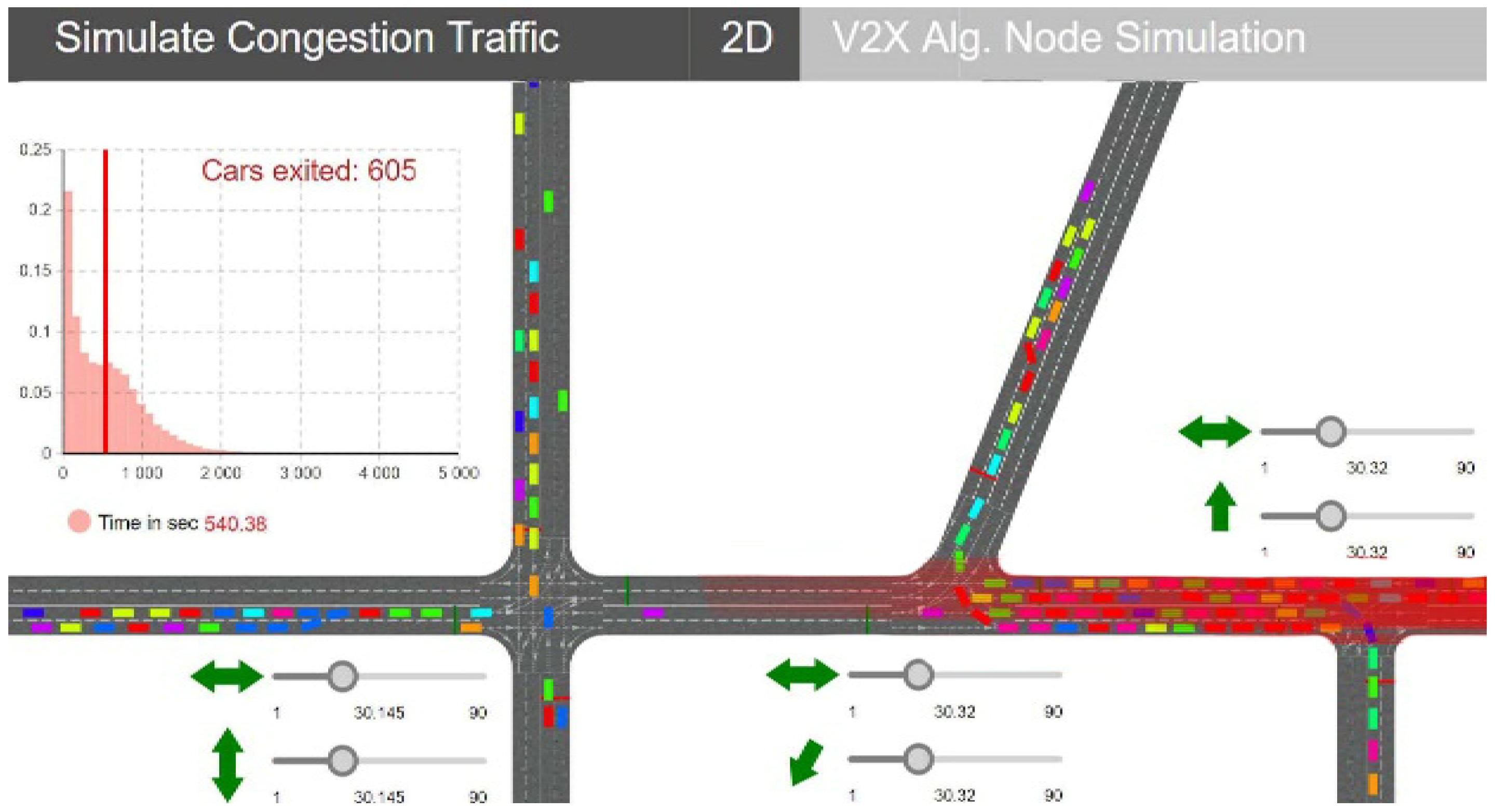
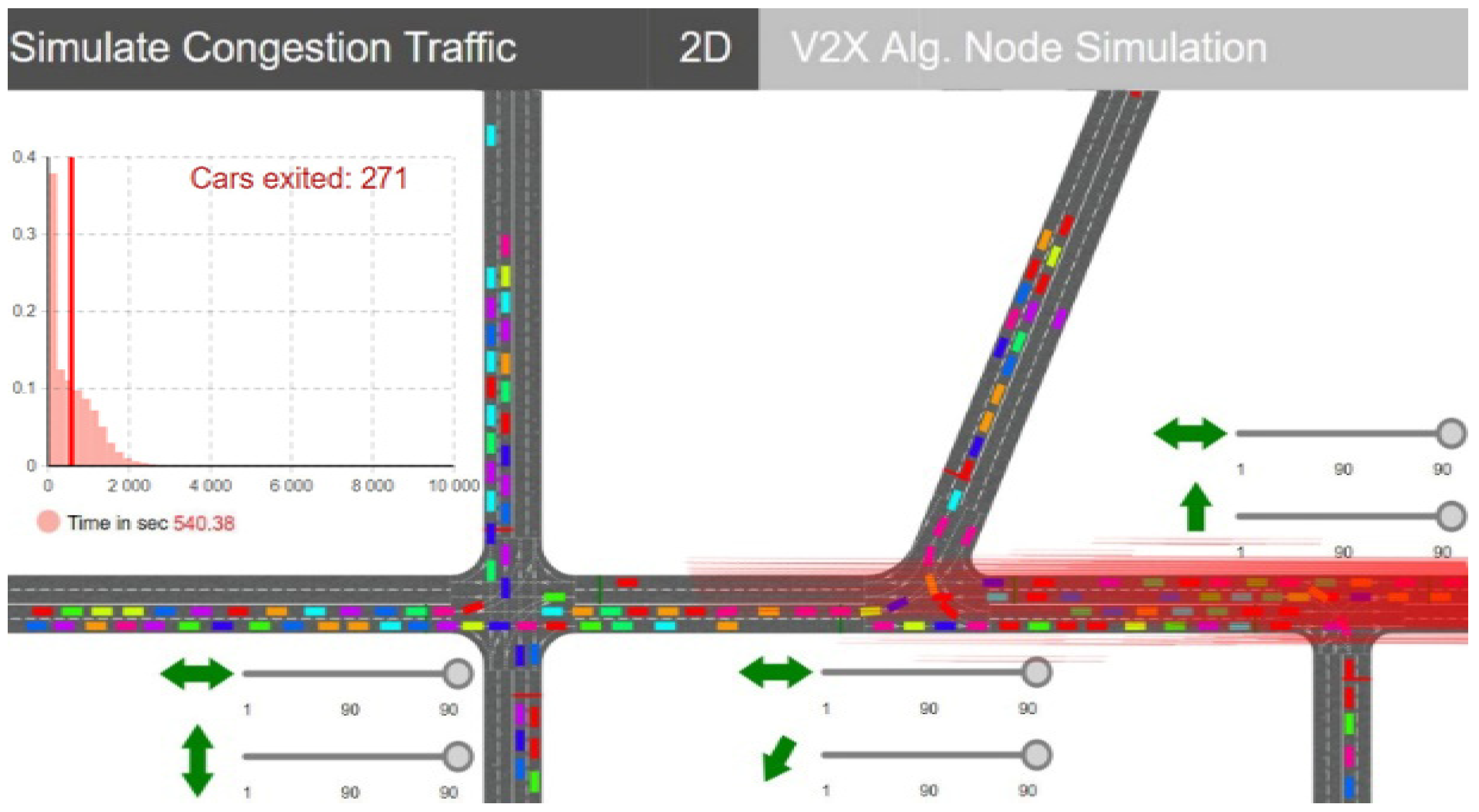
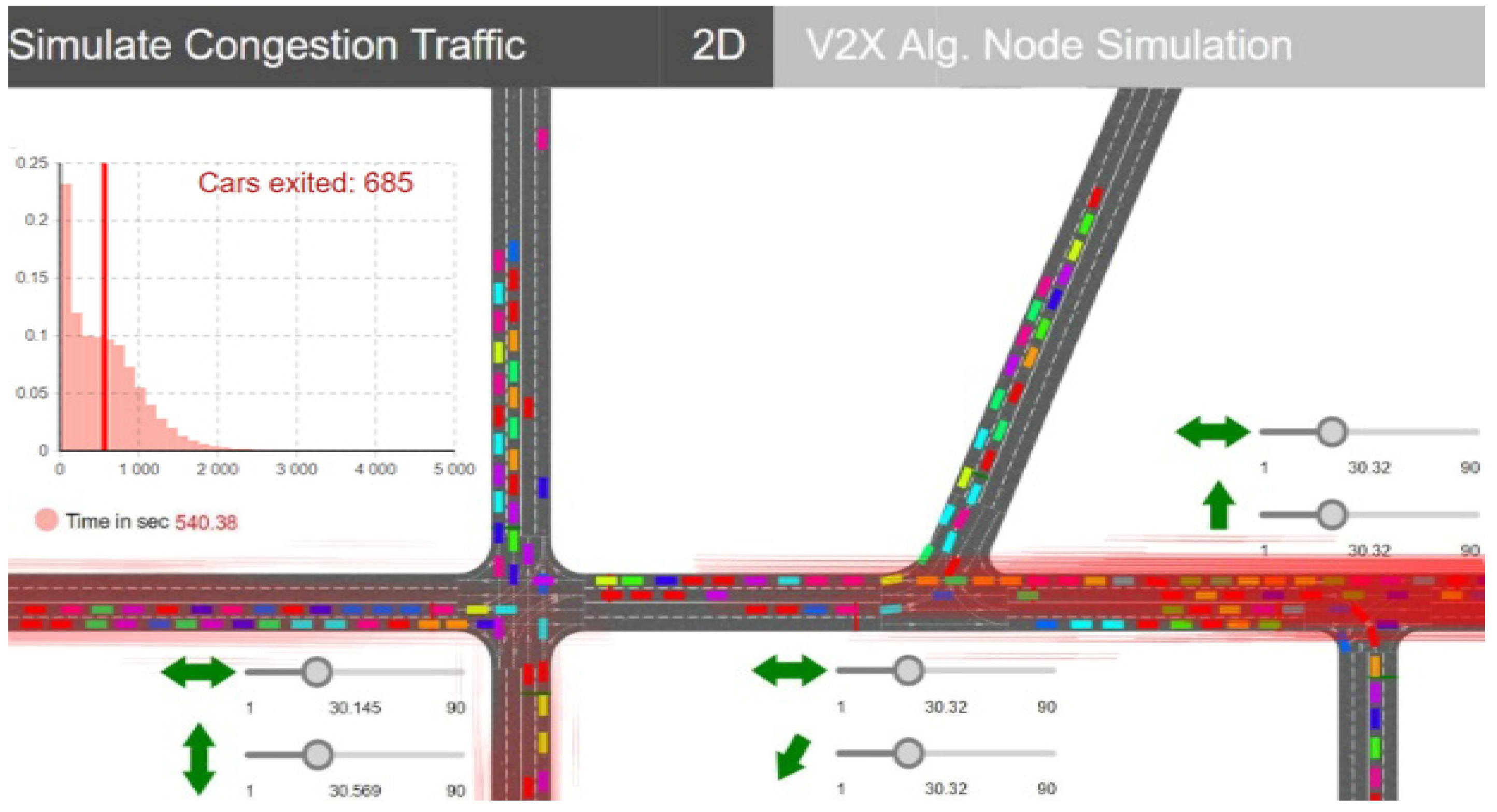
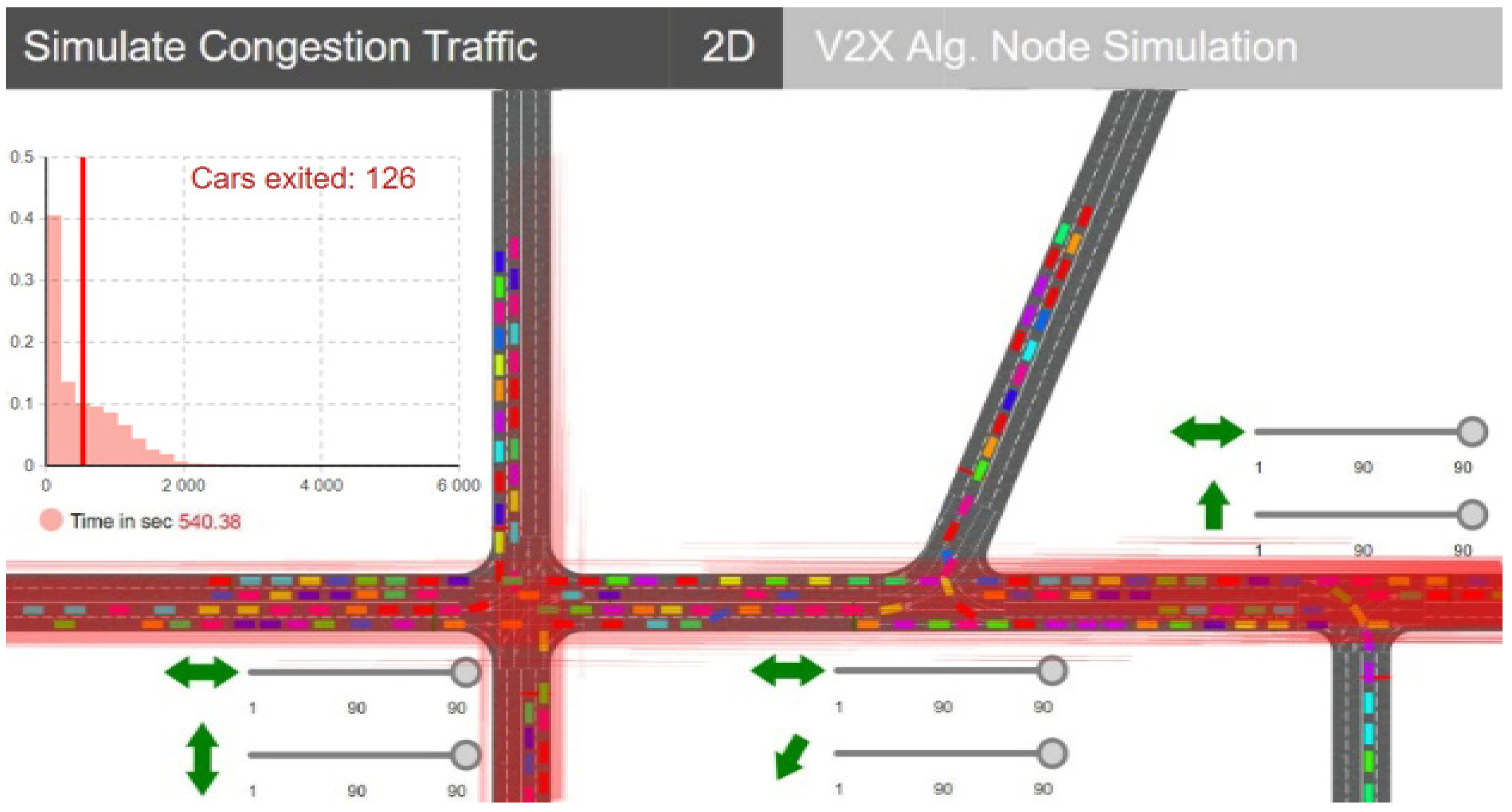
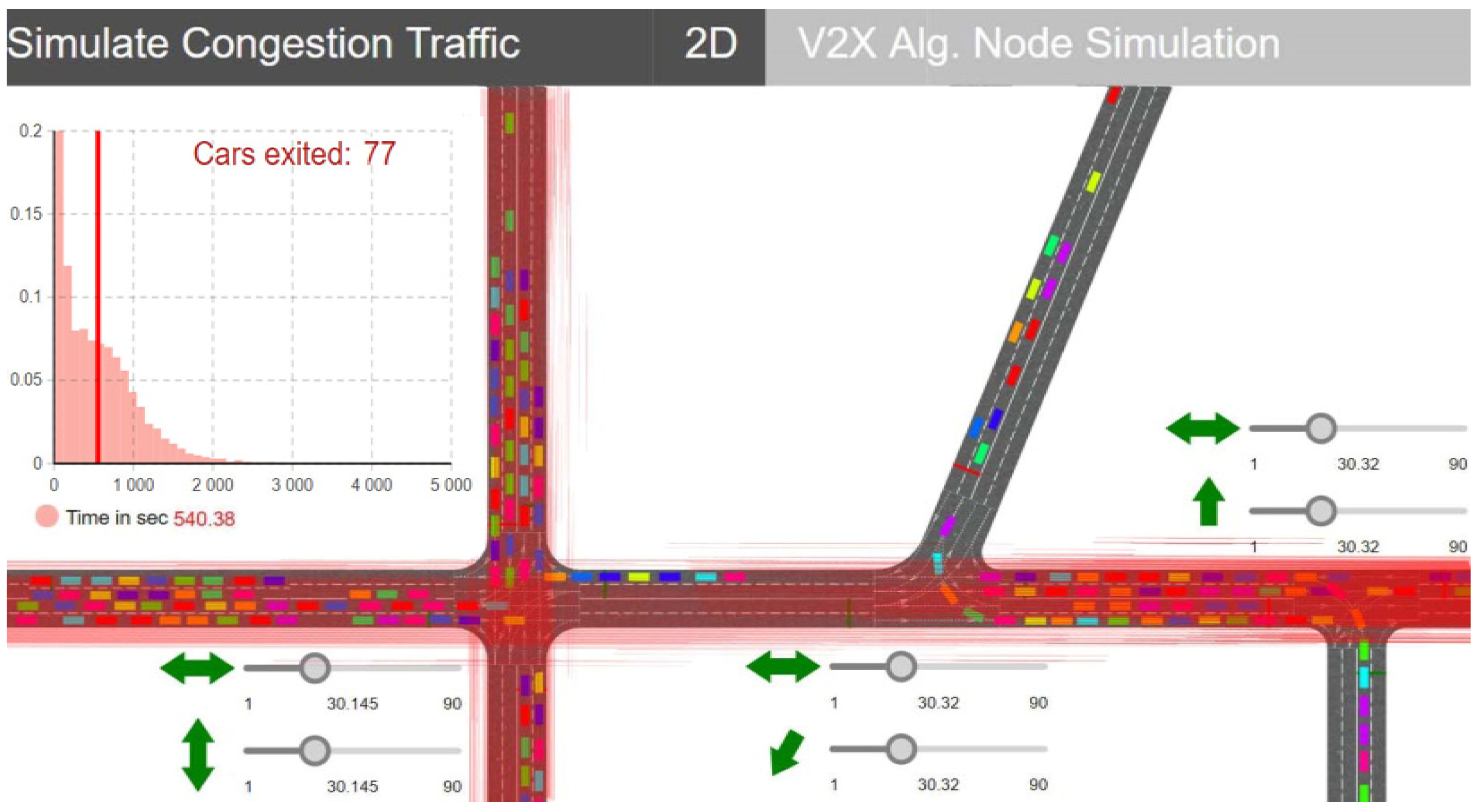
4.3. Simulated Scenario Results
4.4. Traffic Flow Solution and Three-Dimensional Projection
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- World Health Organization. Global Status Report on Road Safety 2018; World Health Organization: Geneva, Switzerland, 2018. [Google Scholar]
- World Health Organization. Fact Sheet on Road Traffic Injuries; World Health Organization: Geneva, Switzerland, 2018. [Google Scholar]
- U.S. Department of Transportation Research and Innovative Technology Administration. Frequency of Target Crashes for IntelliDrive Safety Systems; Technical Report; U.S. Department of Transportation Research and Innovative Technology Administration: Washington, DC, USA, 2010.
- CAMP Vehicle Safety Communication Consortium. Vehicle Safety Communications Project Task 3 Final Report; Technical Report DOTHS 809 859; CAMP Vehicle Safety Communication Consortium: Farmington Hills, MI, USA, 2005. [Google Scholar]
- Kenney, J.B. Dedicated short-range communications (DSRC) standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Wu, X.; Subramanian, S.; Guha, R.; White, R.G.; Li, J.; Lu, K.W.; Bucceri, A.; Zhang, T. Vehicular communications using DSRC: Challenges, enhancements, and evolution. IEEE J. Sel. Areas Commun. 2013, 31, 399–408. [Google Scholar] [CrossRef]
- Ligo, A.K.; Peha, J.M.; Ferreira, P.; Barros, J. Throughput and Economics of DSRC-based internet of vehicles. IEEE Access 2018, 6, 7276–7290. [Google Scholar] [CrossRef]
- Koziol, M. MWC Barcelona 2019: On the Road to Self-Driving Cars, 5G Will Make Us Better Drivers; IEEE Spectrum Press: New York, NY, USA, 2019. [Google Scholar]
- Căilean, A.; Dimian, M. Toward Environmental-adaptive visible light communications receivers for automotive applications: A Review. IEEE Sens. J. 2016, 16, 2803–2811. [Google Scholar] [CrossRef]
- Zadobrischi, E.; Cosovanu, L.; Avătămăniţei, S.; Căilean, A. Complementary Radiofrequency and Visible Light Systems for Indoor and Vehicular Communications. In Proceedings of the 2019 23rd International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 9–11 October 2019; pp. 419–423. [Google Scholar] [CrossRef]
- Căilean, A.-M.; Dimian, M.; Popa, V. Noise-Adaptive Visible Light Communications Receiver for Automotive Applications: A Step Toward Self-Awareness. Sensors 2020, 20, 3764. [Google Scholar] [CrossRef] [PubMed]
- Liang, Z.; Wakahara, Y. Real-time urban traffic amount prediction models for dynamic route guidance systems. Eurasip J. Wirel. Commun. Netw. 2014, 2014, 85. [Google Scholar] [CrossRef]
- Petrin, A. Quantifying the benefits of new products: The case of the minivan. J. Political Econ. 2002, 110, 705–729. [Google Scholar] [CrossRef]
- Huang, J.; Ye, J. Autonomous Detection for Traffic Flow Parameters of a Vehicle-Mounted Sensing Device Based on Symmetrical Difference. Symmetry 2020, 12, 72. [Google Scholar] [CrossRef]
- Song, T.-J.; Kim, S.; Williams, B.; Rouphail, N.; List, G. Crash Classification by Congestion Type for Highways. Appl. Sci. 2020, 10, 2583. [Google Scholar] [CrossRef]
- Zadobrischi, E.; Avătămănitei, S.; Căilean, A.; Dimian, M.; Negru, M. Toward a hybrid vehicle communication platform based on VLC and DSRC technologies. In Proceedings of the 2019 IEEE 15th International Conference on Intelligent Computer Communication and Processing (ICCP), Cluj-Napoca, Romania, 5–7 September 2019; pp. 103–107. [Google Scholar] [CrossRef]
- Narzt, W.; Wilflingseder, U.; Pomberger, G.; Kolb, D.; Hörtner, H.; Futurelab, A.E. Self-Organizing Traffic Control for Congestion Avoidance and Traffic Flow Improvement. In Proceedings of the 15th World Congress on Intelligent Transport Systems and ITS America’s 2008 Annual MeetingITS America ERTICOITS JapanTransCore, New York, NY, USA, 16–20 November 2008. [Google Scholar]
- Mahmassani, H. Dynamic network traffic assignment and simulation methodology for advanced system management applications. Netw. Spat. Econ. 2001, 1, 267–292. [Google Scholar] [CrossRef]
- Guo, J.; Huang, W.; Williams, B. Adaptive Kalman filter approach for stochastic short-term traffic flow rate prediction and uncertainty quantification. Transp. Res. Part C Emerg. Technol. 2014, 43, 50–64. [Google Scholar] [CrossRef]
- Wang, J.; Peeta, S.; He, X. Multiclass traffic assignment model for mixed traffic flow of human-driven vehicles and connected and autonomous vehicles. Transp. Res. Part B Methodol. 2019, 126, 139–168. [Google Scholar] [CrossRef]
- Howard, D.; Mark, B.; Martin, H. Neural Network Toolbox For Use with Matlab; The Math Works: Natick, MA, USA, 2007. [Google Scholar]
- Mahut, M.; Florian, M.; Tremblay, N. Evaluation of a simulation-based dynamic traffic assignment model in off-line use. In Proceedings of the 7th International IEEE Conference on Intelligent Transportation Systems, Washington, WA, USA, 3–6 October 2004; pp. 1028–1032. [Google Scholar] [CrossRef]
- Yang, X.; Luo, S.; Gao, K.; Qiao, T.; Chen, X. Application of data science technologies in intelligent prediction of traffic congestion. J. Adv. Transp. 2019, 2019, 2915369. [Google Scholar] [CrossRef]
- Harrod, S.; Cerreto, F.; Nielsen, O. OpenTrack simulation model files and output dataset for a Copenhagen suburban railway. Data in Brief 2019, 25, 103952. [Google Scholar] [CrossRef]
- Sliwa, B.; Liebig, T.; Vranken, T.; Schreckenberg, M.; Wietfeld, C. System-of-systems modeling, analysis and optimization of hybrid vehicular traffic. In Proceedings of the 2019 IEEE International Systems Conference (SysCon), Orlando, FL, USA, 8–11 April 2019; pp. 1–8. [Google Scholar]
- Lin, L.; Li, W.; Peeta, S. Efficient Data Collection and Accurate Travel Time Estimation in a Connected Vehicle Environment Via Real-Time Compressive Sensing. J. Big Data Anal. Transp. 2019, 1, 95–107. [Google Scholar] [CrossRef]
- Peeta, S.; Ziliaskopoulos, A.K. Foundations of dynamic traffic assignment: The past, the present and the future. Netw. Spat. Econ. 2001, 1, 233–265. [Google Scholar] [CrossRef]
- Tang, T.-Q.; Shi, W.-F.; Huang, H.-J.; Wu, W.-X.; Song, Z. A route-based traffic flow model accounting for interruption factors. Physica A 2018, 514, 767–785. [Google Scholar] [CrossRef]
- Papamichail, I.; Bekiaris-Liberis, N.; Delis, A.; Manolis, D.; Mountakis, K.-S.; Nikolos, I.; Roncoli, C.; Papageorgiou, M. Motorway traffic flow modelling, estimation and control with vehicle automation and communication systems. Annu. Rev. Control 2019, 48, 325–346. [Google Scholar] [CrossRef]
- Lobo, J.; Alberti, M.; Allen-Dumas, M.; Arcaute, E.; Barthelemy, M.; Tapia, L.; Brail, S.; Bettencourt, L.; Beukes, A.; Chen, W.; et al. Urban science: Integrated theory from the first cities to sustainable metropolises. SSRN Electron. J. 2020. [Google Scholar] [CrossRef]
- Barthelemy, M. Revisiting urban economics for understanding urban data. In Theories and Models of Urbanization; Springer: Cham, Switzerland, 2020; pp. 121–131. [Google Scholar] [CrossRef]
- Haferkamp, M.; Al-Askary, M.; Dorn, D.; Sliwa, B.; Habel, L.; Schreckenberg, M.; Wietfeld, C. Radio-based traffic flow detection and vehicle classification for future smart cities. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, NSW, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar]
- Guo, R.-Y.; Huang, H.-J. A discrete dynamical system of formulating traffic assignment: Revisiting Smith’s model. Transp. Res. C 2016, 71, 122–142. [Google Scholar] [CrossRef]
- Zheng, F.; Li, J.; van Zuylen, H.; Liu, X.; Yang, H. Urban travel time reliability at different traffic conditions. J. Intell. Transp. Syst. 2017, 22, 106–120. [Google Scholar] [CrossRef]
- Alshalalfah, B.; Kaysi, I.; Sayegh, A.; Shalaby, A. Performance measurement systems for public transport systems in mass events: Lessons learned from the Southern Masha’er rail system during the 2010 pilgrimage season. In Proceedings of the the 13th International Conference on Competition and Ownership in Land Passenger Transport (Thredbo), Oxford, UK, 15–19 September 2013. [Google Scholar]
- Liu, J.; Zheng, F.; van Zuylen, H.; Li, J. A dynamic OD prediction approach for urban networks based on automatic number plate recognition data. Transp. Res. Procedia 2020, 47, 601–608. [Google Scholar] [CrossRef]
- Zheng, F.; van Zuylen, H.; Liu, X.; Le Vine, S. Reliability-based traffic signal control for urban arterial roads. IEEE Trans. Intell. Transp. Syst. 2016, 18, 643–655. [Google Scholar] [CrossRef]
- Gong, S.; Zhou, A.; Peeta, S. Cooperative adaptive cruise control for a platoon of connected and autonomous vehicles considering dynamic information flow topology. Transp. Res. Rec. 2019, 2673, 185–198. [Google Scholar] [CrossRef]
- Mashayekhi, M.; List, G. A modular colored stochastic petri net for modeling and analysis of signalized intersections. IEEE Trans. Intell. Transp. Syst. 2015, 17, 701–713. [Google Scholar] [CrossRef]
- Liu, L.; Li, C.; Li, Y.; Peeta, S.; Lin, L. Car-following behavior of connected vehicles in a mixed traffic flow: Modeling and stability analysis. In Proceedings of the 2018 IEEE 8th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Tianjin, China, 19–23 July 2018; pp. 1085–1088. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | 2 | 3 | 4 | 5 | Congestion Rate % | |
|---|---|---|---|---|---|---|
| Scenario 1 | 100 | 591 | 325 | 36 | 65 | 28 |
| Scenario 2 | 300 | 605 | 271 | 57 | 30 | 42 |
| Scenario 3 | 500 | 685 | 126 | 76 | 14 | 75 |
| Scenario 4 | 700 | 77 | 54 | 8 | 6 | 85 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zadobrischi, E.; Cosovanu, L.-M.; Dimian, M. Traffic Flow Density Model and Dynamic Traffic Congestion Model Simulation Based on Practice Case with Vehicle Network and System Traffic Intelligent Communication. Symmetry 2020, 12, 1172. https://doi.org/10.3390/sym12071172
Zadobrischi E, Cosovanu L-M, Dimian M. Traffic Flow Density Model and Dynamic Traffic Congestion Model Simulation Based on Practice Case with Vehicle Network and System Traffic Intelligent Communication. Symmetry. 2020; 12(7):1172. https://doi.org/10.3390/sym12071172
Chicago/Turabian StyleZadobrischi, Eduard, Lucian-Mihai Cosovanu, and Mihai Dimian. 2020. "Traffic Flow Density Model and Dynamic Traffic Congestion Model Simulation Based on Practice Case with Vehicle Network and System Traffic Intelligent Communication" Symmetry 12, no. 7: 1172. https://doi.org/10.3390/sym12071172
APA StyleZadobrischi, E., Cosovanu, L.-M., & Dimian, M. (2020). Traffic Flow Density Model and Dynamic Traffic Congestion Model Simulation Based on Practice Case with Vehicle Network and System Traffic Intelligent Communication. Symmetry, 12(7), 1172. https://doi.org/10.3390/sym12071172