Research on a Sliding Detection Method for an Elevator Traction Wheel Based on Machine Vision



Abstract
1. Introduction
2. Slip Detection Scheme
2.1. Slip Detection Method
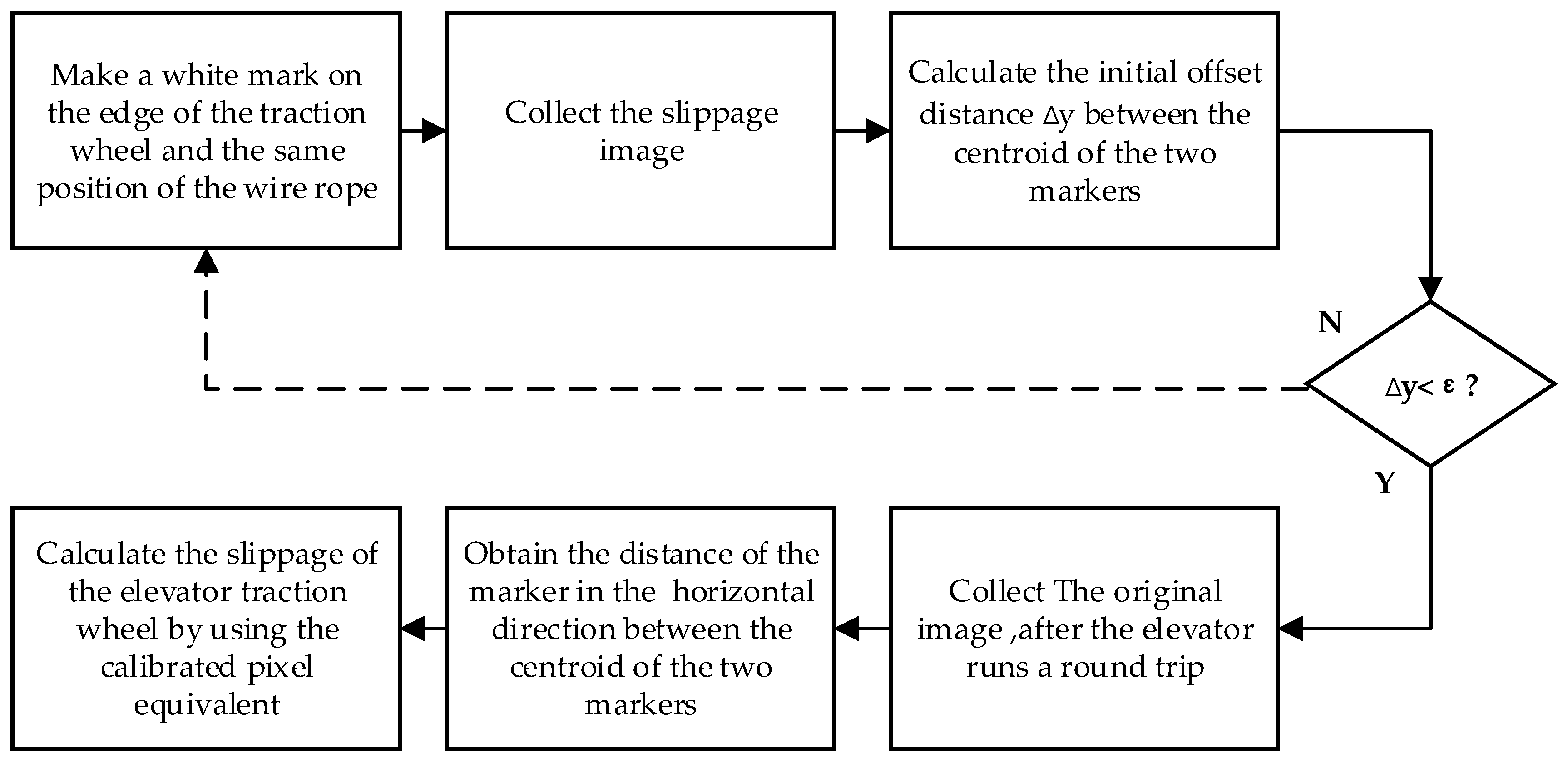
- (1)
- Make a white mark on the edge of the traction wheel and on the same position of the wire rope.
- (2)
- Collect the slippage image and use the image processing algorithm to obtain the offset distance between the centroid of the two white markers in the circumference direction ∆y. When ∆y < ε, the marker is qualified; otherwise, the marker is not qualified, and it needs to be marked again. ε is the preset minimum offset distance.
- (3)
- When the elevator runs a round trip and produces slippage, the white mark on the edge of the traction wheel and the wire rope will be misaligned. The original image of the mark will be collected by the CCD camera located directly above the traction wheel.
- (4)
- For the original image, the improved nonlinear geometric transformation algorithm is used to transform the sliding image with different object distances into the target image with the same object distances.
- (5)
- For the target image, the slippage detection algorithm is used to obtain the distance of the marker in the horizontal direction, and the slippage of the elevator traction wheel is calculated by using the calibrated pixel equivalent and the initial slip distance.
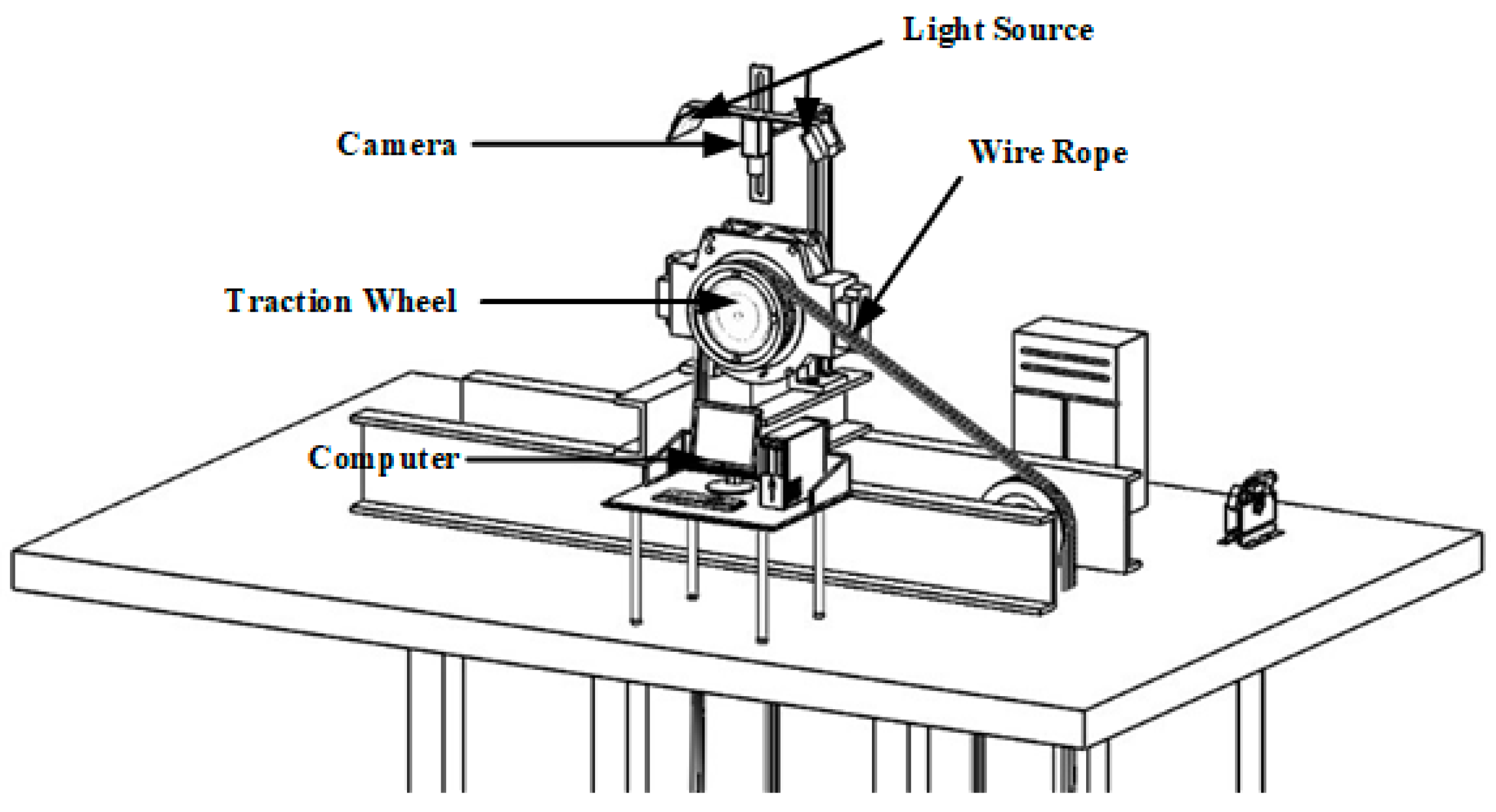
2.2. The Experiment Scheme
3. Slip Detection Algorithm
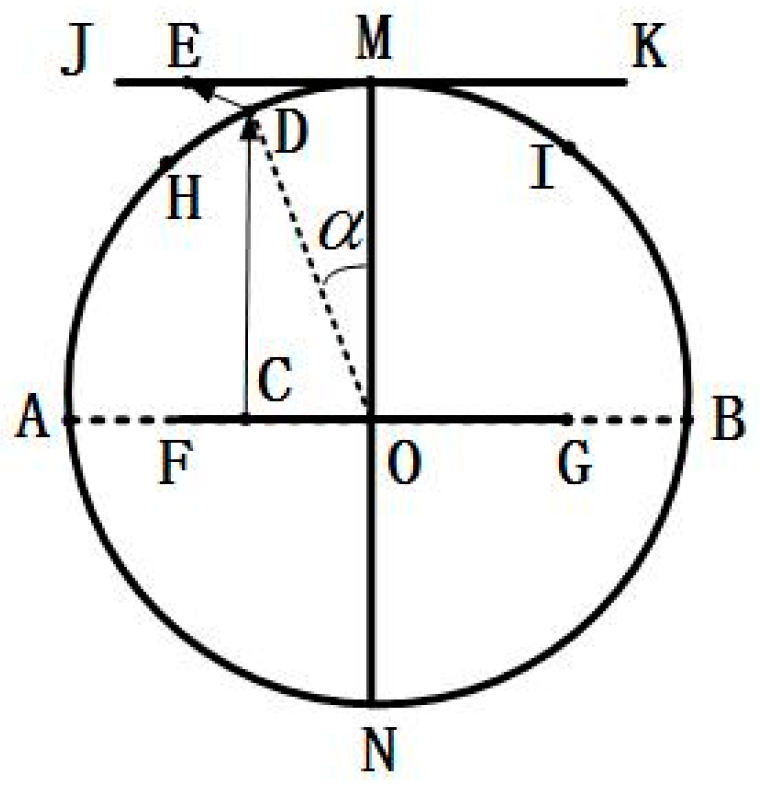
3.1. Nonlinear Geometric Transformation of Images
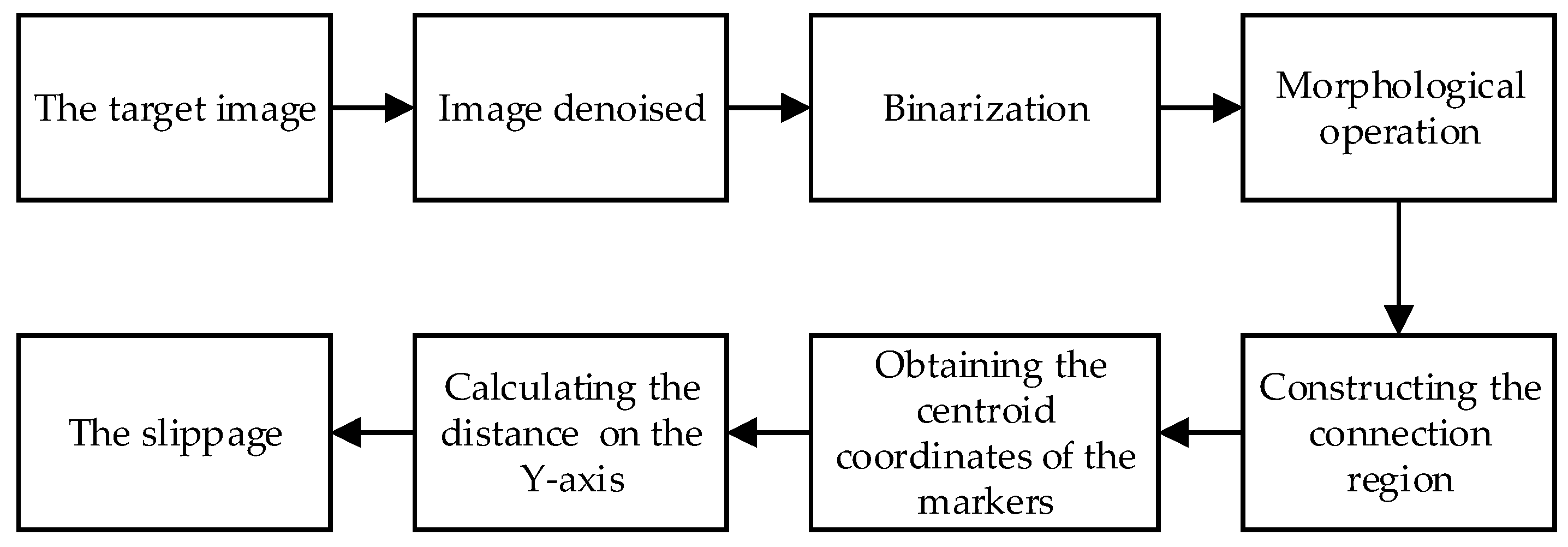
3.2. Image Processing Algorithm for Slip Detection
4. Camera Calibration and the Building of the Experimental Platform
4.1. Camera Calibration
4.2. Building the Experimental Platform
5. Test Result Analysis
5.1. On-Site Testing
5.2. Error and Measurement Uncertainty Analysis
5.2.1. Error Analysis
5.2.2. Measurement Uncertainty Analysis
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wu, H. Analysis of wheel groove wear and inspection of traction elevator. China Stand. 2017, 8, 44. [Google Scholar]
- Yuan, X.L. Consideration on wheel groove wear and inspection of traction elevator. Sci. Technol. Innov. 2018, 8, 67–68. [Google Scholar]
- Zheng, K.; Shang, C. Analysis of skidding causes of wire rope in traction elevator. China Equip. Eng. 2017, 23, 87–88. [Google Scholar]
- Chen, Z.; Ma, Q.D.; Shen, J. Instance analysis of the failure test of no-load traction capacity of elevator. China Spec. Equip. Saf. 2016, 32, 44–46. [Google Scholar]
- Ma, X.; Pan, Y.; Shi, X. Experimental investigation of friction and slip at the traction interface of rope and sheave. J. Appl. Mech. 2018, 85, 23–29. [Google Scholar] [CrossRef]
- Liu, Z.H. A method for measuring slip of cable rope in traction drive. Mod. Manuf. Technol. Equip. 2017, 5, 72–74. [Google Scholar]
- He, Z.L.; Shi, X. Measurement of Traction Slip Based on Image Morphology Algorithm. Mach. Des. Res. 2015, 31, 98–100. [Google Scholar]
- Irfan, M.; Glowacz, A. Design of a novel electric diagnostic technique for fault analysis of centrifugal pumps. Appl. Sci. 2019, 9, 5093. [Google Scholar] [CrossRef]
- Huang, J.J.; Ke, W.; Wang, J. Color shading detection and rating system for denim based on computer vision. J. Text. Res. 2019, 40, 163–169. [Google Scholar]
- Skouroliakou, A.; Kalatzis, I.; Kalyvas, N. Infrared thermography quantitative image processing. J. Phys. Conf. Ser. 2017, 931, 012033. [Google Scholar] [CrossRef]
- Wang, Y.W.; Qu, G.T.; Liu, X.L. Image subtraction detection algorithm for surface defect of steel ball. J. Comput. Aided Des. Comput. Graph. 2016, 28, 1699–1704. [Google Scholar]
- Li, B.; Dong, M.L.; Zhang, F. Research of preparation and image processing method of PDMS micropost arrays with opaque top surface. Infrared Laser Eng. 2018, 47, 380–387. [Google Scholar]
- Glowacz, A.; Glowacz, W.; Glowacz, Z.; Kozik, J. Early fault diagnosis of bearing and stator faults of the single-phase induction motor using acoustic signals. Measurement 2018, 113, 1–9. [Google Scholar] [CrossRef]
- Xu, S.P.; Zhang, X.Q.; Jiang, Y.N. Noise level estimation based on local means and its application to the blind BM3D denoising algorithm. J. Image Graph. 2017, 22, 422–434. [Google Scholar]
- Wu, L.L.; Xing, Y.Q.; Zheng, B.Z. A preliminary study of zanthoxylurn bungeanum maxim varieties discriminating by computer vision. Chin. J. Sens. Actuators 2016, 29, 136–140. [Google Scholar]
- Li, J.F.; Li, M.R. Research on detecting method of light guide plate defect based on machine vision. Optoelectron. Laser 2019, 30, 256–265. [Google Scholar]
- Xu, Y.; Zhu, Z.C.; Sheng, X.W. Improvement recognition method of vamp’s feature points based on machine vision. J. Text. 2019, 40, 168–174. [Google Scholar]
- Xue, B.; Yang, Z.; Zhao, J.; Ma, R.; Guo, H. Grain size characterization by laser-based ultrasonics based on the centroid frequency shift method. Mater. Charact. 2019, 155, 109800. [Google Scholar]
- Caesarendra, W.; Gang, N.; Yang, B.S. Machine condition prognosis based on sequential monte carlo method. Expert Syst. Appl. 2010, 37, 2412–2420. [Google Scholar] [CrossRef]
- Xu, J.B.; Nie, J.L.; Wang, S. Robust filtering method for surface measurement based on rough error estimation. Acta Metrol. Sin. 2017, 38, 391–395. [Google Scholar]
- Liu, H.; Wang, Z.X.; Zhong, J.; Xie, Z.W. Early detection of spontaneous combustion disaster of sulphide ore stockpiles. Teh. Vjesn. 2015, 22, 1579–1587. [Google Scholar]
- Kong, F.D.; Chen, C.; Wang, C.; Ren, X.D. The effect of different stability calculation methods on the results of quantity comparison. Shanghai Metrol. Test 2008, 45, 37–39. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group Number | The Real Slippage/mm | Single Pixel Distance/pixel | Average Pixel Distance/pixel | Detection of Slippage/mm | Absolute Error/mm | Fractional Error/% | Residual Error/mm |
|---|---|---|---|---|---|---|---|
| 1 | 33.93 | 41 | 40.0 | 35.6 | 1.67 | 4.9% | 1.8 |
| 40 | |||||||
| 39 | |||||||
| 2 | 34.34 | 37 | 37.0 | 33.0 | −1.32 | −3.8% | −0.7 |
| 36 | |||||||
| 38 | |||||||
| 3 | 34.91 | 37 | 37.3 | 33.3 | −1.60 | −4.6% | −0.4 |
| 40 | |||||||
| 35 | |||||||
| 4 | 32.99 | 40 | 38.7 | 34.5 | 1.46 | 4.4% | 0.7 |
| 37 | |||||||
| 39 | |||||||
| 5 | 31.96 | 36 | 37.0 | 33.0 | 1.06 | 3.3% | −0.7 |
| 37 | |||||||
| 38 | |||||||
| 6 | 32.42 | 36 | 36.3 | 32.4 | 0.03 | 0.1% | −1.3 |
| 37 | |||||||
| 36 | |||||||
| 7 | 32.48 | 39 | 37.3 | 33.3 | 0.83 | 2.5% | −0.4 |
| 37 | |||||||
| 36 | |||||||
| 8 | 32.47 | 38 | 39.7 | 35.3 | 2.84 | 8.8% | 1.6 |
| 41 | |||||||
| 40 | |||||||
| 9 | 32.02 | 39 | 37.3 | 33.3 | 1.29 | 4.0% | −0.4 |
| 37 | |||||||
| 36 | |||||||
| Average value | 33.06 | 37.9 | 37.9 | 33.8 | 0.74 | 2.2% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Jing, L.; Hong, T.; Liu, H.; Glowacz, A. Research on a Sliding Detection Method for an Elevator Traction Wheel Based on Machine Vision. Symmetry 2020, 12, 1158. https://doi.org/10.3390/sym12071158
Chen J, Jing L, Hong T, Liu H, Glowacz A. Research on a Sliding Detection Method for an Elevator Traction Wheel Based on Machine Vision. Symmetry. 2020; 12(7):1158. https://doi.org/10.3390/sym12071158
Chicago/Turabian StyleChen, Jiayan, Limeng Jing, Tao Hong, Hui Liu, and Adam Glowacz. 2020. "Research on a Sliding Detection Method for an Elevator Traction Wheel Based on Machine Vision" Symmetry 12, no. 7: 1158. https://doi.org/10.3390/sym12071158
APA StyleChen, J., Jing, L., Hong, T., Liu, H., & Glowacz, A. (2020). Research on a Sliding Detection Method for an Elevator Traction Wheel Based on Machine Vision. Symmetry, 12(7), 1158. https://doi.org/10.3390/sym12071158