1. An Analytic Representation of a Limaçon of Pascal
A limaçon, known also as a limaçon of Pascal is a curve that in polar coordinates has the form
where
are positive real numbers and
. This is also called the limaçon of Pascal. The word “limaçon” comes from the Latin “limax”, meaning “snail”. Converting to Cartesian coordinates the Equation (
1) becomes
that has the following parametric form
If
, a limaçon is convex, and if
has an indentation bounded by two inflection points. If
, the limaçon degenerates to a cardioid. If
, the limaçon has an inner loop, and when
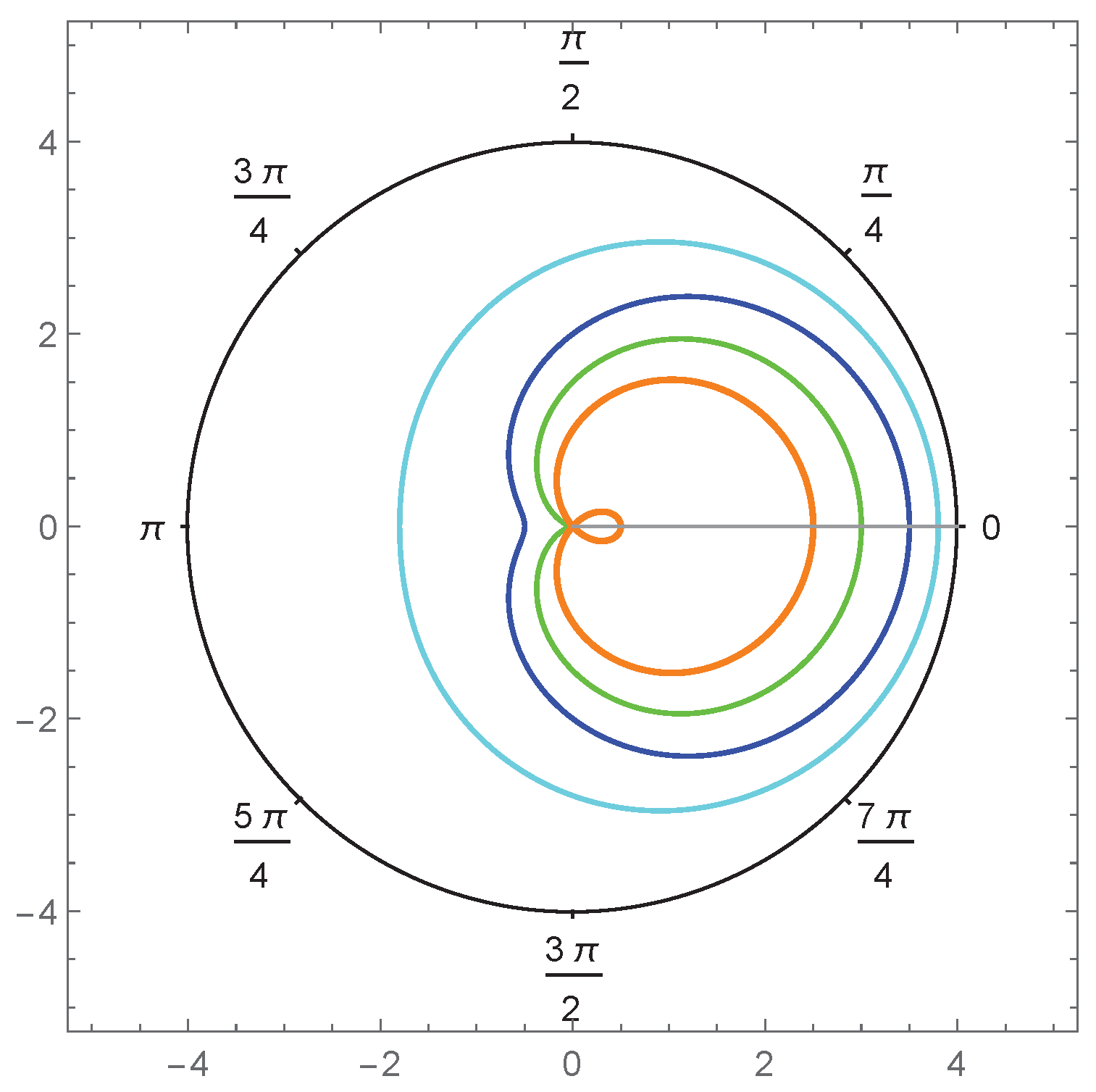
, it is a trisectrix (but not the Maclaurin trisectrix). In
Figure 1, we have plotted the limaçon
for some different values of
a and
b.
An analytic description of a limaçon is given by
that maps the unit disk
of the complex plane
, onto a domain bounded by a limaçon defined by
where
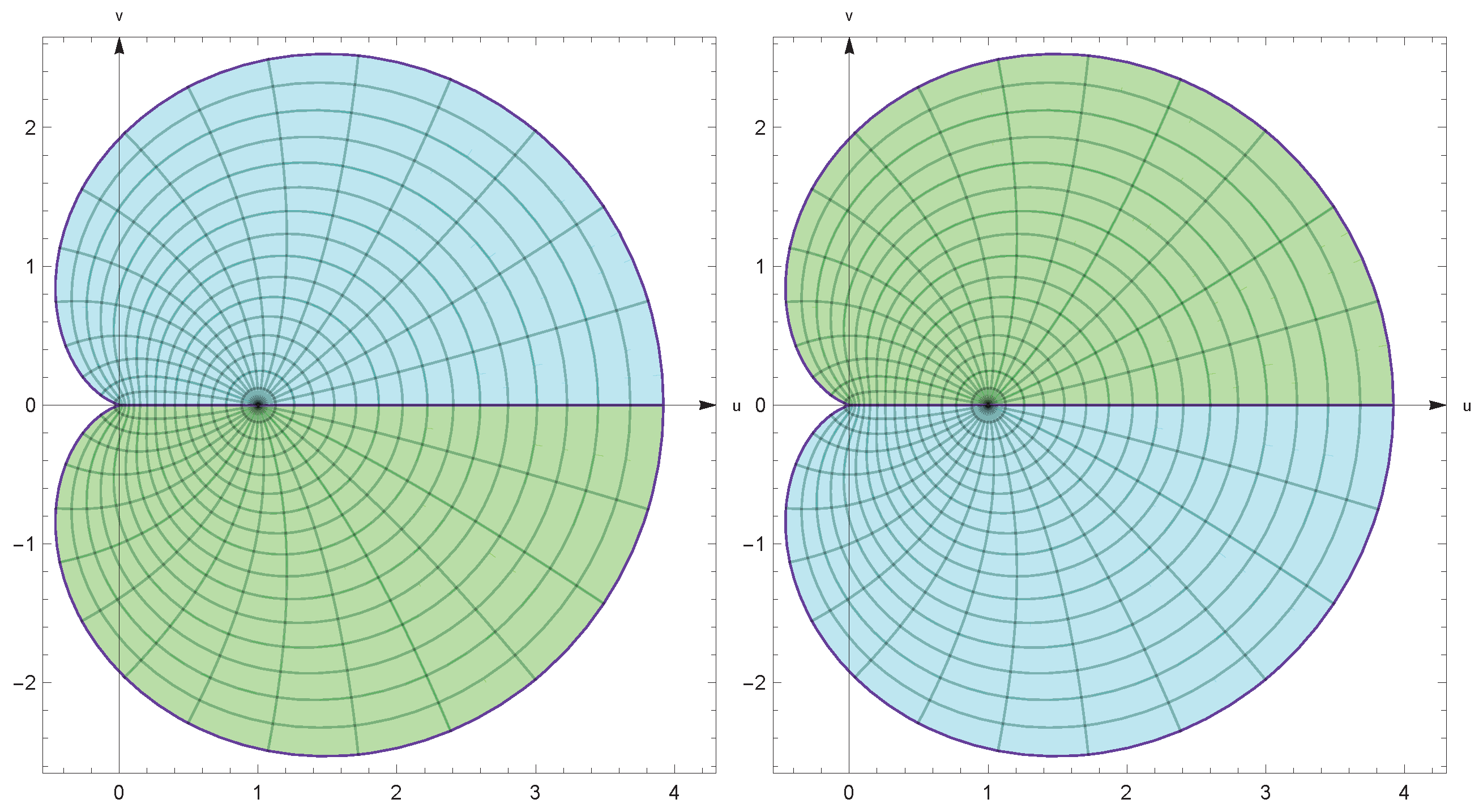
(The
Figure 2 shows an example of a image of
by the function
for different values of
s). Indeed, setting
with
, we obtain
Let us denote
and
. Then
Taking a parametrization
we can find that the image of unit circle
under
is a curve given by
that is the limaçon of Pascal. Furthermore,
is an analytic and does not have any poles in
since
.
It is easy to check that the real and an imaginary part of
is bounded. Then
and
attains its minimum and maximum on
. Indeed, by Equation (
4) we have
The extremum of
is attained at the critical points of the above function, equivalently
which are
and the solution of equation
, if
. Clearly, the minimum value is when
and the maximum value is when
or
. Thus,
For
the critical points are
and
. Thus we have
In addition, from Equation (
4) we have
Then
if and only if
for
. Using an elementary computation we can find then that
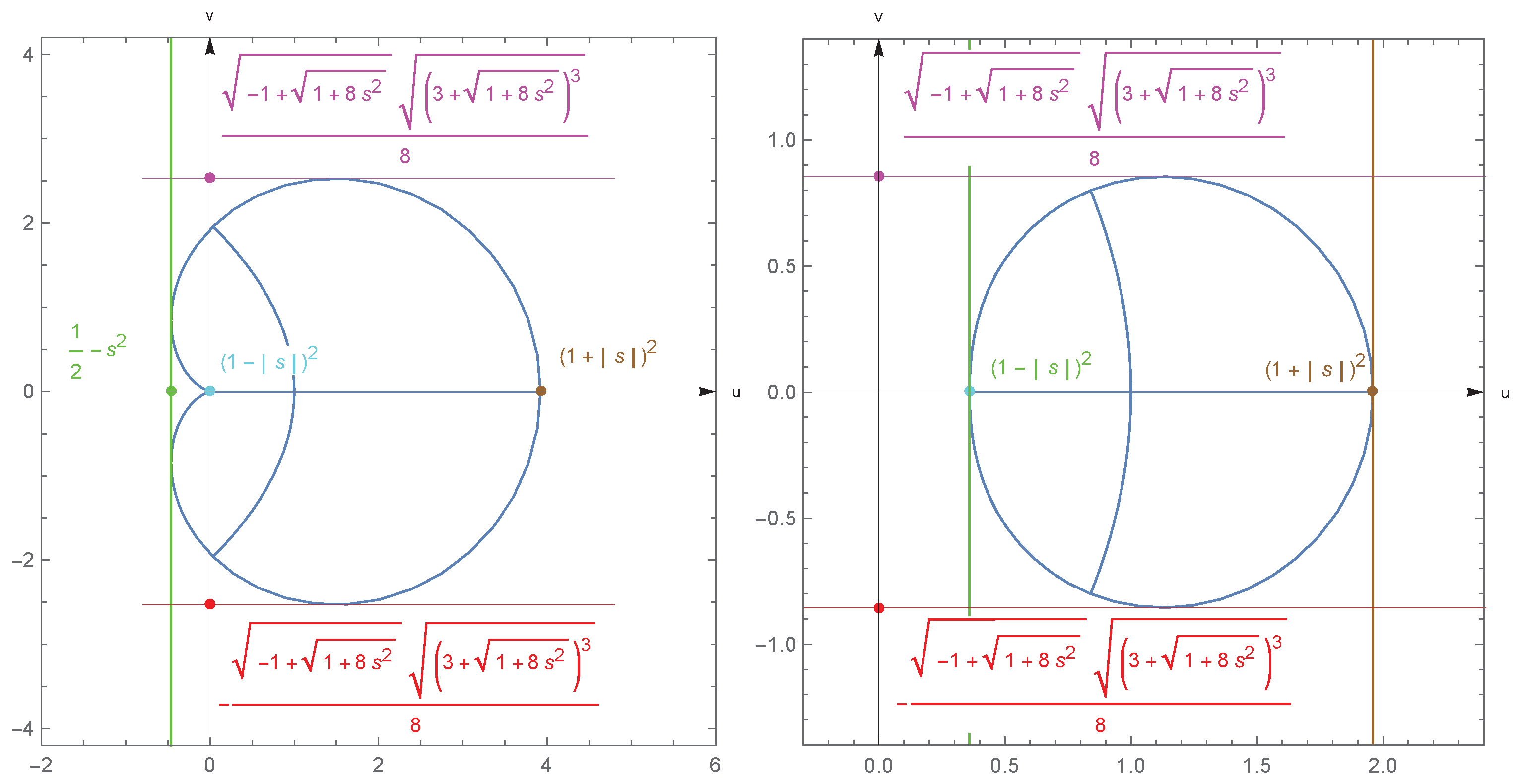
The above discussion can be summarized as follows (cf.
Figure 3).
Theorem 1. Let be a function defined by Equation (6) with . Then 2. Definitions and Preliminaries
Let
denote the class of functions
of the form:
which are analytic in the open unit disk
in the complex plane
. The subclass of
consisting of all
univalent functions
f in
, is denoted by
. A functions
is said to belong to the class
, called
starlike functions of order , if
and is said to belong to the class
, called
convex functions of order , if
[
1].
The special cases occur for
, and then we get the classical classes of
starlike and
convex univalent functions, denoted
and
, respectively. Let
f and
g be analytic in
. Then the function
f is said to
subordinate to
g in
written by
, if there exists a self-map function
which is analytic in
with
and
;
, and such that
;
. If
g is univalent in
, then
if and only if
and
[
2].
Let the classes
and
be defined by
and
respectively. Then, it follows from [
3]
and
are the families of univalent function, convex and starlike in one direction, respectively.
Let
be the class of analytic univalent function
with positive real part in
,
and
with respect to
and symmetric with respect to real axis. Ma and Minda [
4] gave a unified representation of different subclasses of starlike and convex functions using subordination to some function
. The superordinate function
is assumed to be univalent. In this way the classes
and
has been defined
Specialization of the function
leads to a number of well-known function classes. For instance,
and
.
yields
and
. For various choices of
and a detailed discussion about classes we refer to the papers [
5,
6,
7,
8,
9,
9].
Definition 1 ([
10])
. Let and the function be univalent in . If the function is analytic in and satisfies the following first-order differential subordinationthen is called a solution
of the differential subordination.A function is said to be a dominant
of the differential subordination Equation (8) if for all satisfying Equation (8). An univalent dominant that satisfies for all dominants of Equation (8), is said to be best dominant of the differential subordination. Lemma 1 ([
10])
. Let q be univalent in , and let Φ
be analytic in a domain D containing . If is starlike, thenand q is the best dominant. This paper aims to investigate the geometric properties of functions in the classes and . In addition, we necessary and sufficient conditions for certain particular members of to be in the classes and .
3. The Classes and and Its Properties
In the following section, we obtain certain inclusion relations and extremal functions for functions in the classes and .
Lemma 2. Let , and be defined by (2). Then is starlike in , moreover and and for , . In addition, if , then Proof. A straightforward calculation shows that
satisfies
and
In order to prove the second part of lemma, denote for
the function
for some
and
. It is easy to see that
Q attains its minimum at
and maximum at
, and for
attains its minimum at
and maximum at
. □
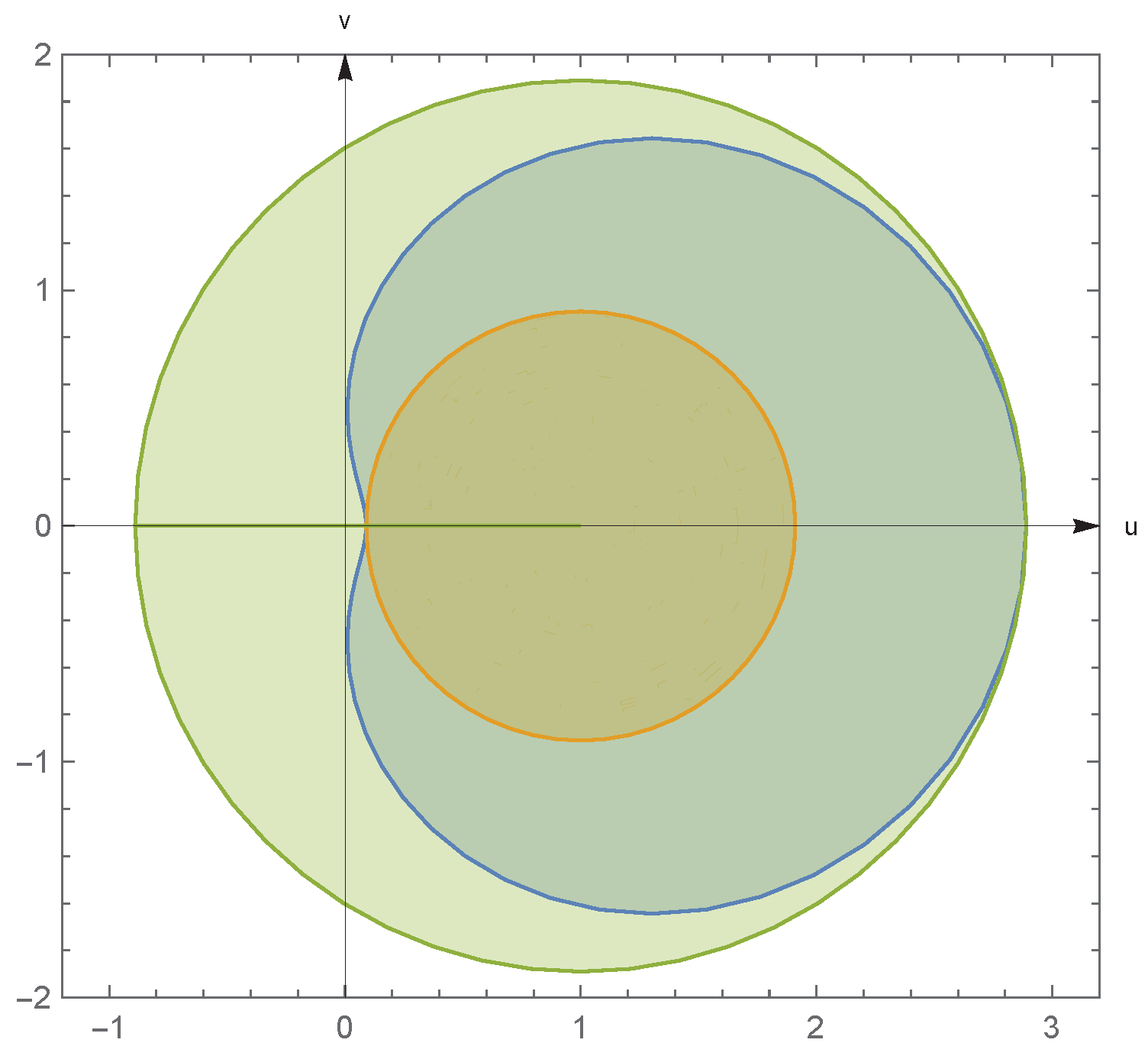
From Lemma 2 it can be seen that the smallest disk with center
that contains
and the largest disk with center at
contained in
are the following (see
Figure 4)
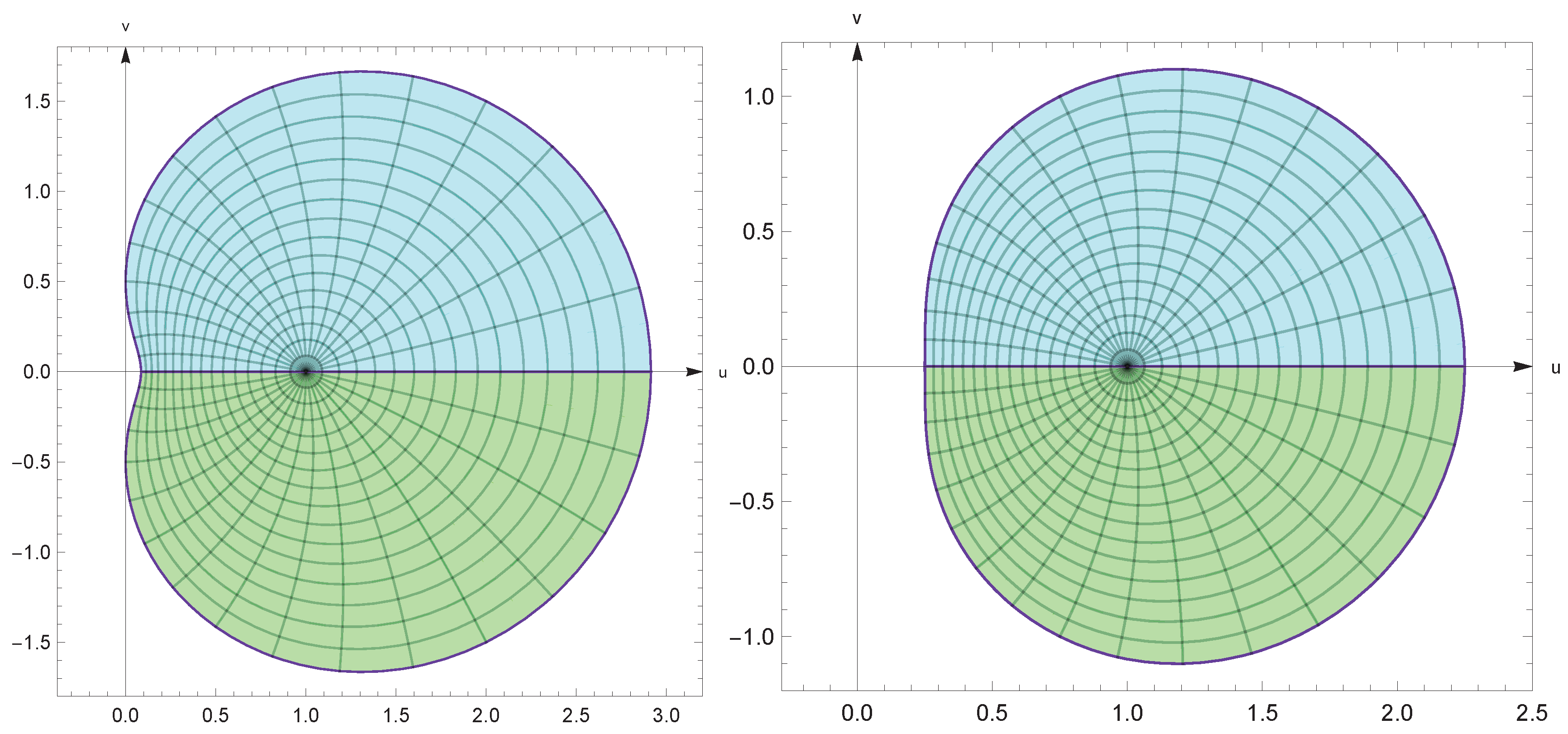
Taking into account the properties of a function
given in Theorem 1 and Lemma 2, we see that for
, the function
(see also
Figure 5). Additionally, those properties allow to formulate the following definition.
Definition 2. By , with , we denote a class of all analytic functions p such that and in , that is It is clear that is a subfamily of the well-known Carathéodory class of normalized functions in with positive real part.
On the basis of the relationship between subclasses of the Carathéodory class and the notion of classical starlikeness and convexity we also define the following classes.
Definition 3. Let denote the subfamily of consisting of the functions f, satisfying the conditionand let be a class of analytic functions f such that From Theorem 1, we obtain that for
(and
, respectively), it holds
and
where
is given in Theorem 1. Geometrically, the condition Equations (
11) and (
12) mean that the expression
or
lies in a domain bounded by the limaçon
. Since a domain
is contained in a right half-plane, we deduce that
, resp.) is a proper subset of a starlike functions
(convex function
, resp.). Further properties of
yield:
For a function
, we have the equivalence:
if and only if
. This gives the structural formula for functions in
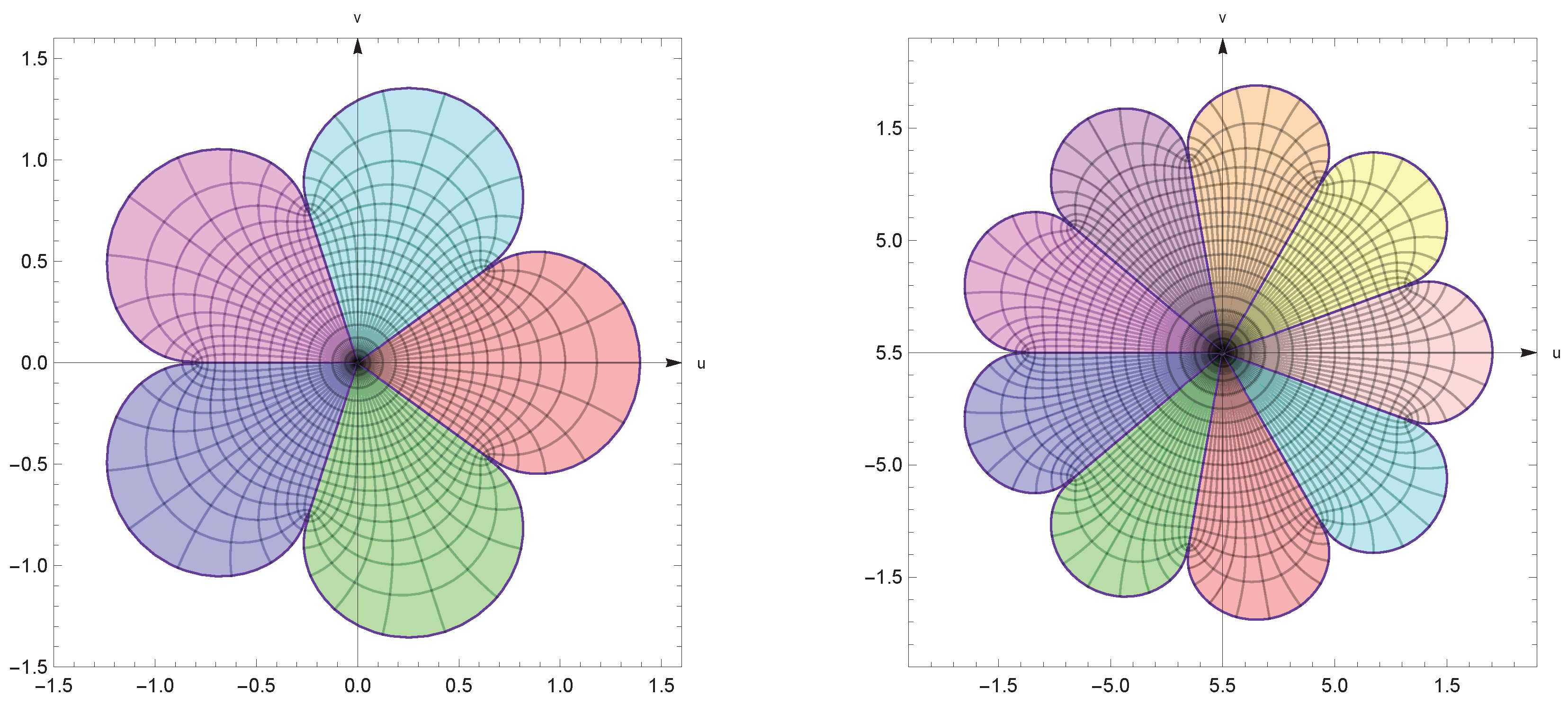
. A function
g is in the class
if and only if there exists an analytic function
, such that
This integral representation supply many examples of functions in class
. For
, we define the functions
in
by the relation
namely,
These functions are extremal for several problems in the class
(see
Figure 6).
For a function
, we have the equivalence:
if and only if
. This gives the structural formula for functions in
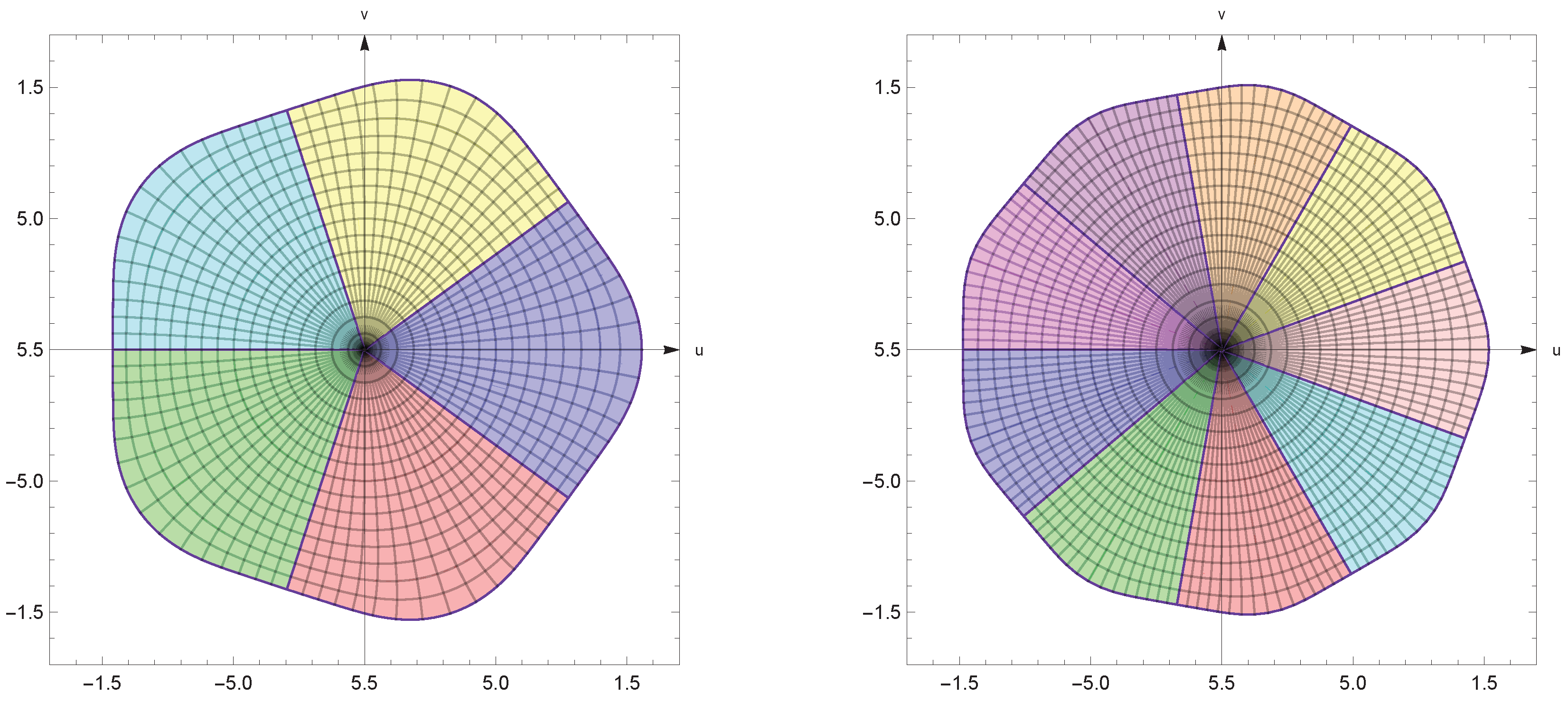
. A function
h is in the class
if and only if there exists an analytic function
p with
, such that
This above integral representation supply many examples of functions in class
. Let
, then the functions (see
Figure 7)
for some
are extremal functions for several problems in the class
. For
we have
From Equation (
9), a function
is in
if and only if
Thus we have the following result.
Proposition 1. Let . The classes and are nonempty. The following functions are the examples of their members.
Let with . Then
Let with . Then
Let . Then
Let . Then
Let . Then
Let . Then
Let . Then
Let . Then
Proof. The function
is univalent, if and only if
. Logarithmic differentiation of a non-zero univalent function
in
yields:
From Equation (
17), the function
is in
if and only if
Thus the case (1) is obtained. The second type obtained of the former and the fact that if and only if . The argumentation of the other cases is similar to arguments (1) and (2). □
The following corollary is the consequence of Lemma 2, and Theorems in [
4].
Corollary 1. If and , then
- 1.
- 2.
- 3.
Equality holds at a given point other than 0 for functions with .
- 4.
- 5.
If , then either f is a rotation of given by Equation (14) or where .
Corollary 2. If and , then
- 1.
- 2.
- 3.
Equality holds at a given point other than 0 for functions with .
- 4.
- 5.
If , then either f is a rotation of given by Equation (16) or where .
Theorem 2. Let p be an analytic function in with . Then for and is the best dominant. Proof. If we take
and
, then for
, the domain
containing
and by Lemma 2
is starlike. Therefore, by Lemma 1 we deduce the assertion. □
If we take , , and in Theorem 1 we obtain the following results.
Corollary 3. Let and . Then Theorem 3. Let p be an analytic function in with . Then for and is the best dominant. Proof. If we take
and
, then the domain
containing
and by Lemma 2
is starlike. Therefore, by Lemma 1 we deduce the Theorem. □
If we take in Theorem 3 we obtain the following result.
Corollary 4. Let and . Then 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






