1. Introduction
The early research motivations in the area of fixed point theory were for solving problems in differential equations [
1,
2,
3]. In 1883, Poincaré [
4] established a theorem that was later proved as an equivalence to the Brouwer’s [
5] fixed point theorem. It was in 1912 that Brouwer [
5] published his fixed point theorem of self-continuous mappings on a closed ball, while in the same year (1912), Poincaré [
6] published his fixed point theorem for area-preserving mappings of an annulus, see [
7,
8]. No doubt, Poincaré understood the early fixed point theorems and was using them as a tool in finding solutions of some differential equations see [
3,
4,
6,
9]).
On the other hand, another research motivation can be linked to the work of Picard [
2]; he was utilising systematic application of successive approximations method for finding solutions of different differential equation problems, see [
10]. As a consequence, the famous Banach contraction principle [
11] emerged in 1922, see [
7]. Moreover, it was the same year that boundary value problems of nonlinear ordinary differential equations prompt Birkhoff–Kellogg [
1] to lead the struggle for extending Brouwer’s fixed point theorem to function space, see [
7].
Another angle of fixed point research emerged with the advent of the Knaster–Tarski Fixed point theorem [
12,
13]. The idea was first initiated from both authors (Knaster and Tarski) in 1927 [
12], and later Tarski found some improvement of the work in 1939, which he discussed in some public lectures between 1939 and 1942 [
13,
14]. Finally, in 1955, Tarski [
13] published the comprehensive results together with some applications. A distinctive property of this theorem is that it involves an order relation defined on the space of consideration. Indeed, the order relation serve as an alternative to the continuity and contraction of the mappings as found in Brouwer [
5] and Banach [
11] fixed point theorems, respectively, see [
13].
After the advent of the Brouwer [
5], Banach [
11] and Knaster–Tarski [
13] fixed point theorems, many researchers engage in extension [
15,
16,
17], generalisation [
15,
18,
19,
20,
21] and improvements [
22,
23,
24,
25,
26] of the theorems using different spaces and functions. Along the direction of generalising spaces was Bourbaki–Bakhtin–Cezerwik’s
b-metric space [
27,
28,
29], Matthews’s partial metric space [
30] and Shukla’s Partial
b-metric space [
31].
Looking into the direction of quantum operations, many researchers are interested in finding the condition(s) that guarantees the existence of fixed points/states of quantum operations and the properties attached to the fixed point sets of the quantum operations, see [
32,
33,
34,
35,
36].
In the area of quantum information theory, qubit is seen as a quantum system, whereas quantum operation can be viewed as measurement of quantum system; it describes the evolution of the system through the quantum states. Measurements use to have some errors which can be corrected through quantum error correction codes. The quantum error correction codes are easily developed through the information-preserving structures with the help of the fixed points set of the associated quantum operation. Therefore, the study of quantum operations is vital in the field of quantum information theory, at least in developing the error correction codes, knowing the state of the system (qubit) and the description of energy dissipation effects due to loss of energy from a quantum system [
37].
In 1951, Lüders [
38] discussed the compatibility of quantum states in measurements (quantum operations). He also showed that the compatibility of quantum states in measurements is equivalent to commutativity of the states with each quantum effects in the measurement.
In 1998, Busch et al. [
33] proved a proposition that generalises the Lüder’s theorem and shows that a state is invariant under a quantum operation if the state commutes with every quantum effect that described the quantum operation.
In 2002, Arias et al. [
32] studied the fixed point sets of a quantum operation and gave some conditions to which the set is equal to a commutant set of the quantum effects that described the quantum operation.
In 2011, Long and Zhang [
35] studied the fixed point set of quantum operations, they gave some necessary and sufficient conditions for the existence of a non-trivial fixed point set. Similarly, in 2012, Zhang and Ji [
34] studied the existence of a non-trivial fixed point set of a generalised quantum operation.
In 2016, Zhang and Si [
39] investigated the conditions for which the fixed point set of a quantum operation
with respect to a row contraction
equals to the fixed point set of the power of the quantum operation
for some
Remark 1. It is worth noting that the existence of fixed point(s) of a quantum operation in a finite dimensional Hilbert space depends on the compatibility criteria as provided by Lüders [38]; fixed quantum states must commute with all quantum effects. Therefore, it is difficult to test the compatibility criteria in higher dimensional spaces; testing commutativity of the state with many quantum effects. Thus, the need for other alternatives arises. In this paper, motivated by Batsari et al. [
18], Du et al. [
21] and Dung et al. [
40], we establish some fixed point results in partial
b-metric spaces with a contraction condition that is different from that of Banach [
11], Kannan [
26] and Chatterjea [
23]. As an application of our result(s), we consider using some contractive conditions in establishing the existence of fixed point of a depolarising and generalised amplitude damping quantum operations. For, the depolarising quantum operation is an important source of noise/error in quantum communication that can be found in finite dimensional cases when the quantum system interact with the environment, whereas the generalised amplitude damping is used in the description of energy dissipation effects due to loss of energy from a quantum system.
Moreover, the technique we adopted in establishing the existence of fixed point of quantum operation is entirely different to that of Arias et al. [
32], Busch et al. [
33] and Lüders [
38]. We do not utilise the properties of quantum effects, rather we utilise the properties of the Bloch vectors associated to the quantum states in consideration. Thus, it is an alternative to the existing methods in the literature. Our results generalise and improve some existing results in the literature.
2. Preliminaries
Let X be a nonempty set, denotes the set of non negative real numbers, denotes the set of real numbers, denotes the partially ordered set on X and is a metric space.
A b-metric on X is a function such that,
There exists a real number , for which
denotes the
metric space. It is clear to see that, every metric is a b-metric with
(see [
27,
28,
29]).
The converse is not true in general. For example, taking
, if
, then
is a
metric with
. However, it is not a metric for
and
, condition
fails [
18].
Example 1. [18] Let , . Define by . Then, is a b-metric with and is not a metric. A partial metric or on X is a function such that,
(P1)
(P2)
(P3)
(P4) .
denotes the partial metric space. Observe that every metric is a partial metric with
,
(see [
30]). However, the converse is not necessary true.
Example 2. [41] Define a mapping bywhere . Therefore, Ψ is not a metric but, a partial metric. A partial b-metric on the set X is a function such that,
There exist a real number 1 such that, .
denotes the partial
metric space. Note that, every partial metric is a partial b-metric with
. Also, every b-metric is a partial b-metric with
(see [
31]).
Example 3. [42] Let Define by for all . Then, is a partial b-metric on X, which is neither a b-metric nor a partial metric on X. An open
b-ball for a partial b-metric
is a set of the form
for
, and
[
31].
Every partial b-metric defined on a nonempty set
X generates a topology
on
X, whose base is the family of the open b-balls, where
Moreover, the topological space
is
but not necessary
[
31].
A sequence
in the space
converges with respect to the topology
to a point
if and only if
(see [
31]). The sequence
is Cauchy in
if the below limit exists and is finite
(see [
31]). A partial b-metric space
is complete, if every Cauchy sequence
in
converges to a point
such that,
(see [
31]).
A mapping T is said to be order-preserving on X, whenever implies .
4. Application to Quantum Operations
In quantum systems, measurements can be seen as quantum operations [
44]. Quantum operations are very important in describing quantum systems that interact with the environment.
Let
be the set of bounded linear operators on the separable complex Hilbert space
H;
is the state space of consideration. Suppose
is a collection of operators
’s
satisfying
. A map
of the form
is called a quantum operation [
32], quantum operations can be used in quantum measurements of states. If the
’s are self adjoint then,
is self-adjoint.
General quantum measurements that have more than two values are described by effect-valued measures [
32]. Denote the set of
quantum effects by
Consider the discrete effect-valued measures described by a sequence of
satisfying
where the sum converges in the strong operator topology. Therefore, the probability that outcome
i occurs in the state
is
and the post-measurement state given that
i occurs is
[
32]. Furthermore, the resulting state after the execution of measurement without making any observation is given by
If the measurement does not disturb the state , then we have (fixed point equation).
Furthermore, the probability that an effect
A occurs in the state
given that, the measurement was performed is
If
A is not disturbed by the measurement in any state we have
and by defining
, we end up with
.
More measurements are frequently used in quantum dynamics, quantum computation and quantum information theory [
37,
45,
46].
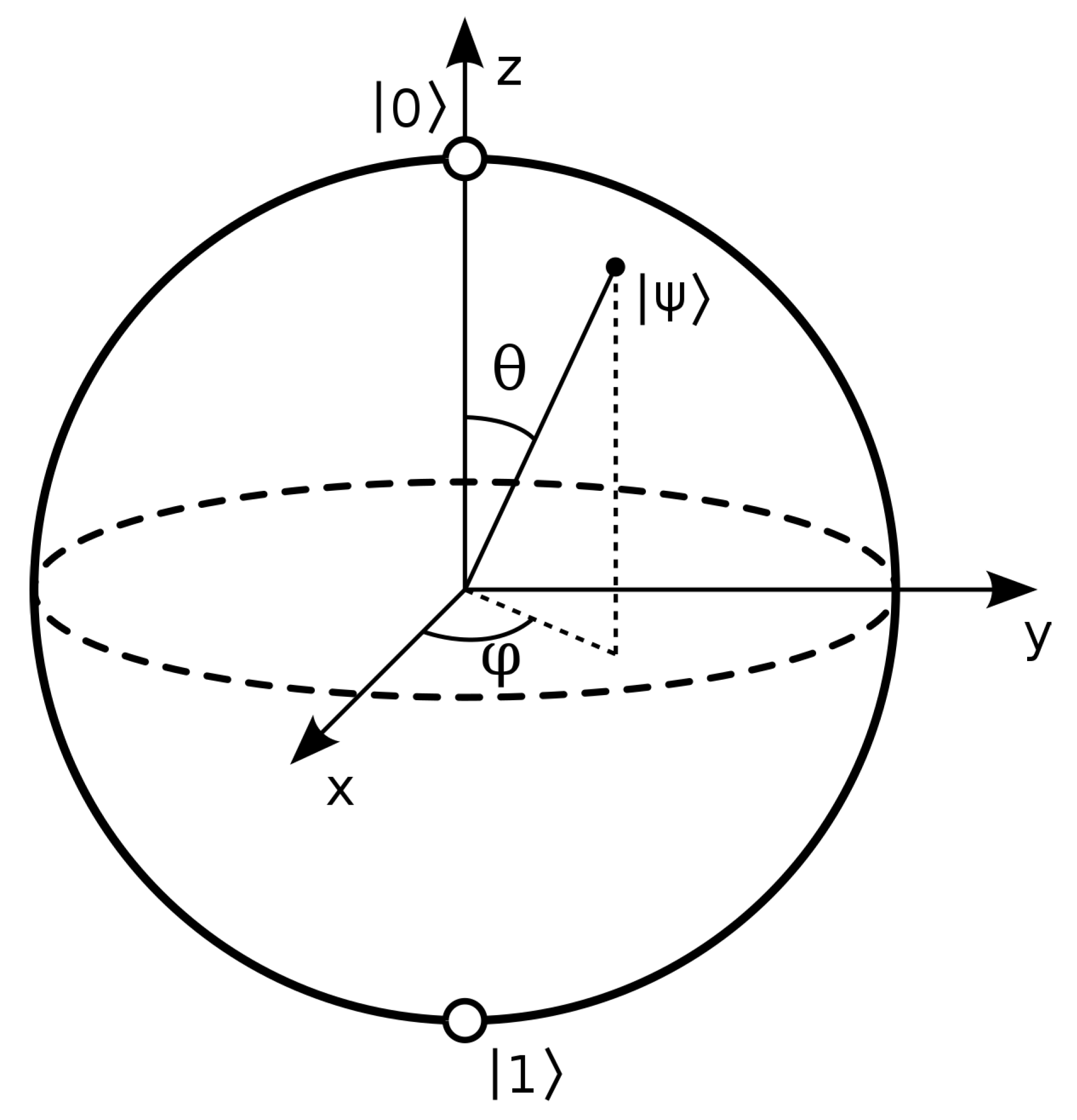
Henceforth we will be dealing with a two-level
single qubit quantum system. Where a quantum state
can be described as
(see [
37]). Considering the representation of a two-level quantum system by the Bloch sphere (
Figure 1) above, a quantum state (
) can be represented with the below density matrix
,
Furthermore, the density
matrix can also take below representation [
37],
where
is the Bloch vector with
, and
for
being the Pauli matrices.
Note that the Bloch vectors with norm less than one are associated to the mixed quantum states, whereas Bloch vectors with norm equals one are associated to the pure quantum states.
Let
be two quantum states in a two level quantum system. Then, the Bures fidelity [
47] between the quantum states
and
is defined as
(see [
47]). The Bures fidelity satisfies
, it is 1 if
and 0 if
and
have an orthogonal support (perfectly distinguishable) [
37].
Now consider a two-level quantum system
X represented with the collection of density matrices
. Define the function
by
It is easy to show that
is a
b-metric on X (partial
b-metric) with
. Define an order relation ⪯ on
X by
It is obvious that, the order relation defined above (
29) is a partial order.
Corollary 5. Let be a complete partial b-metric space associated with the above order ⪯ (29). Suppose an order-preserving quantum operation that satisfies either conditions in Theorems 1 or 2. Then, T has a fixed point. Below example covers both Theorems 1 and 2. However, we precisely execute the solution procedure in favour of Theorem 1.
Example 4. Consider the depolarising quantum operation T on the Bloch sphere X; with the depolarising parameter . Let the comparable quantum states satisfy (29). We will check that, satisfy all the conditions of our theorem(s), as such, it has a unique fixed point.
Now, let
. If the order ⪯ is as defined in (
29), we will start by showing
T is order-preserving. Note that,
T is order-preserving if the angle of rotation describing any two comparable quantum states is invariant under
T, and the distance from origin to
is less than or equal to the distance from origin to
, i.e., if
then
.
Therefore, using the Bloch sphere representation of states in a two-level quantum system below
we proceed as follows,
Clearly, the angles and are not affected by the depolarising quantum operation T. Furthermore, we can deduce that the distance of the quantum state from origin given by is greater than or equal to the distance of the new quantum state from origin given by , . Therefore, for any two comparable quantum states , with respective distances from origin and such that, , the depolarising quantum operation T produces two quantum states , with respective distances from origin and for . As , then . Thus, ; T is order-preserving.
The fidelity of any two quantum states
and
can take the form
(see, [
48]), where
is the inner/dot product between the vectors
and
. So, for any comparable quantum states
and
,
for
being the angle between
and
. Using Equation (
30), one can show that,
.
; for a pure state and o the completely mixed state(origin/center).
; for a pure state that is separated from .
Thus, for , .
Furthermore, using
the condition
is imposed on both Theorems 1 and 2. From the known facts and definitions, we proceed as
Taking
, condition (
3) in Theorem 1 is satisfied. A similar procedure can be used to prove the compliance of condition (
22) in Theorem 2. Finally, in reference to Theorem 1, we conclude that
T has a unique fixed point
(centre). A similar conclusion can be attained using Theorem 2.
Example 5. Consider the quantum operation known as the generalised amplitude damping on the Bloch sphere X defined aswith damping parameter and . Let the comparable quantum states satisfies (29). Then, T has a fixed point. In a similar way as we demonstrated in Example 4, one can show the existence of the invariant state
for the generalised amplitude damping
T as presented in Equation (
31). The effect of the generalised amplitude damping is like a flow of states on the Bloch sphere (Unit ball) towards the fixed state
. The generalised amplitude damping can be used in description of energy dissipation effects due to loss of energy from a quantum system. Note that, the invariant state is unique for every



{kind=link}
