Enhancing the Robustness of Dynamical Decoupling Sequences with Correlated Random Phases


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Results
2.1. The Effect of Controlled Imperfection
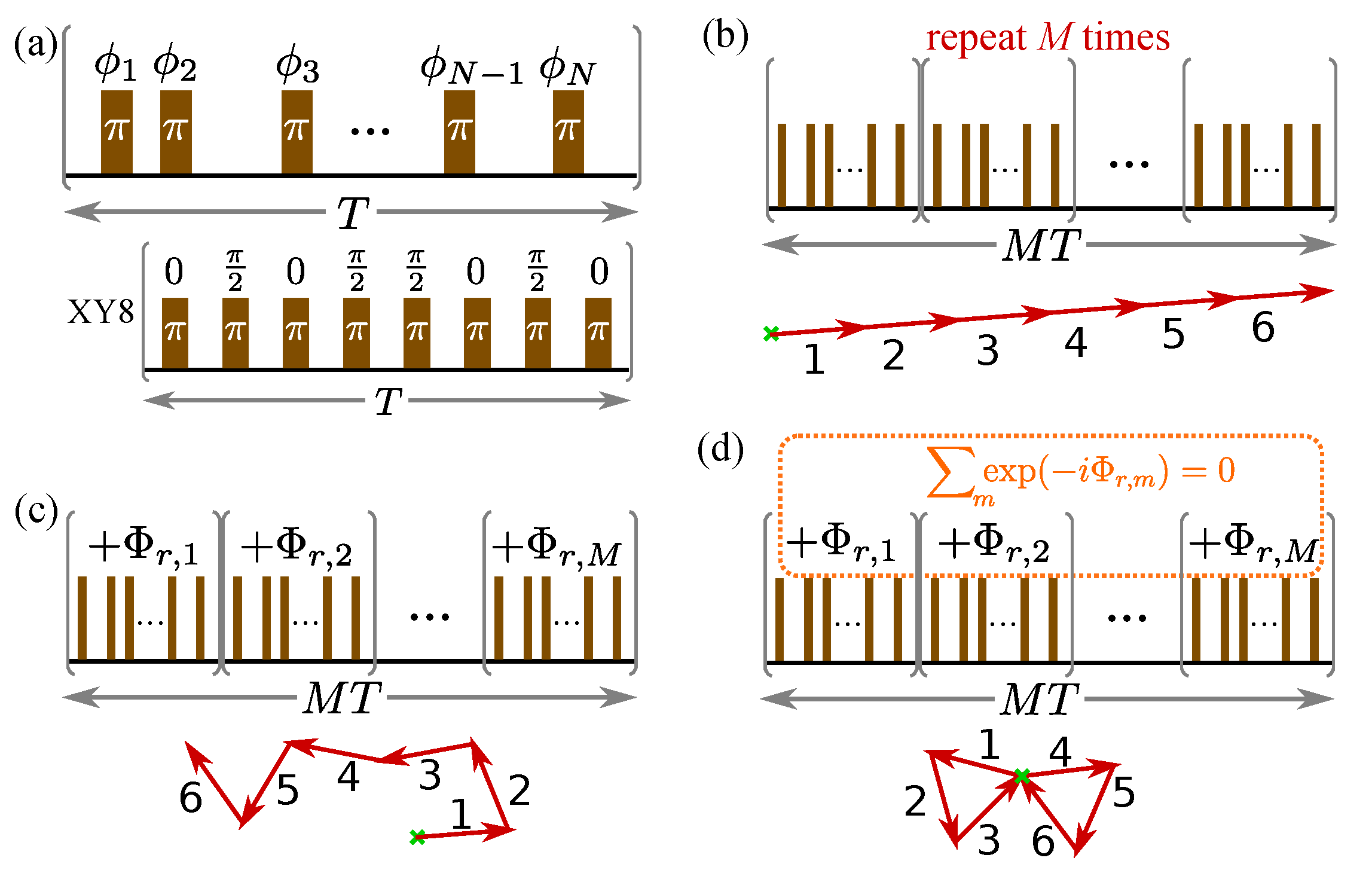
2.1.1. Standard Protocol
2.1.2. Randomisation Protocol
2.1.3. Correlated Randomization Protocol
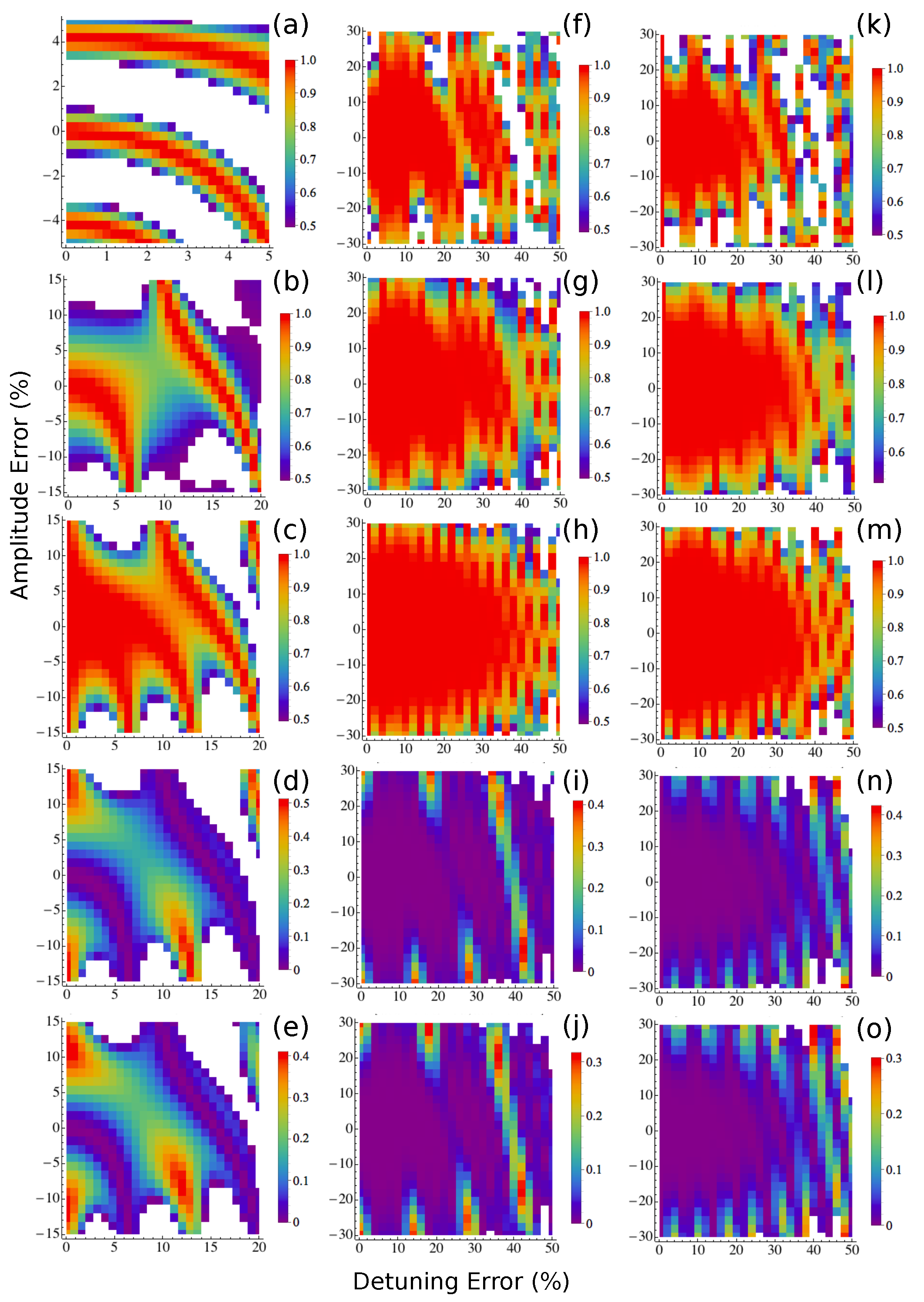
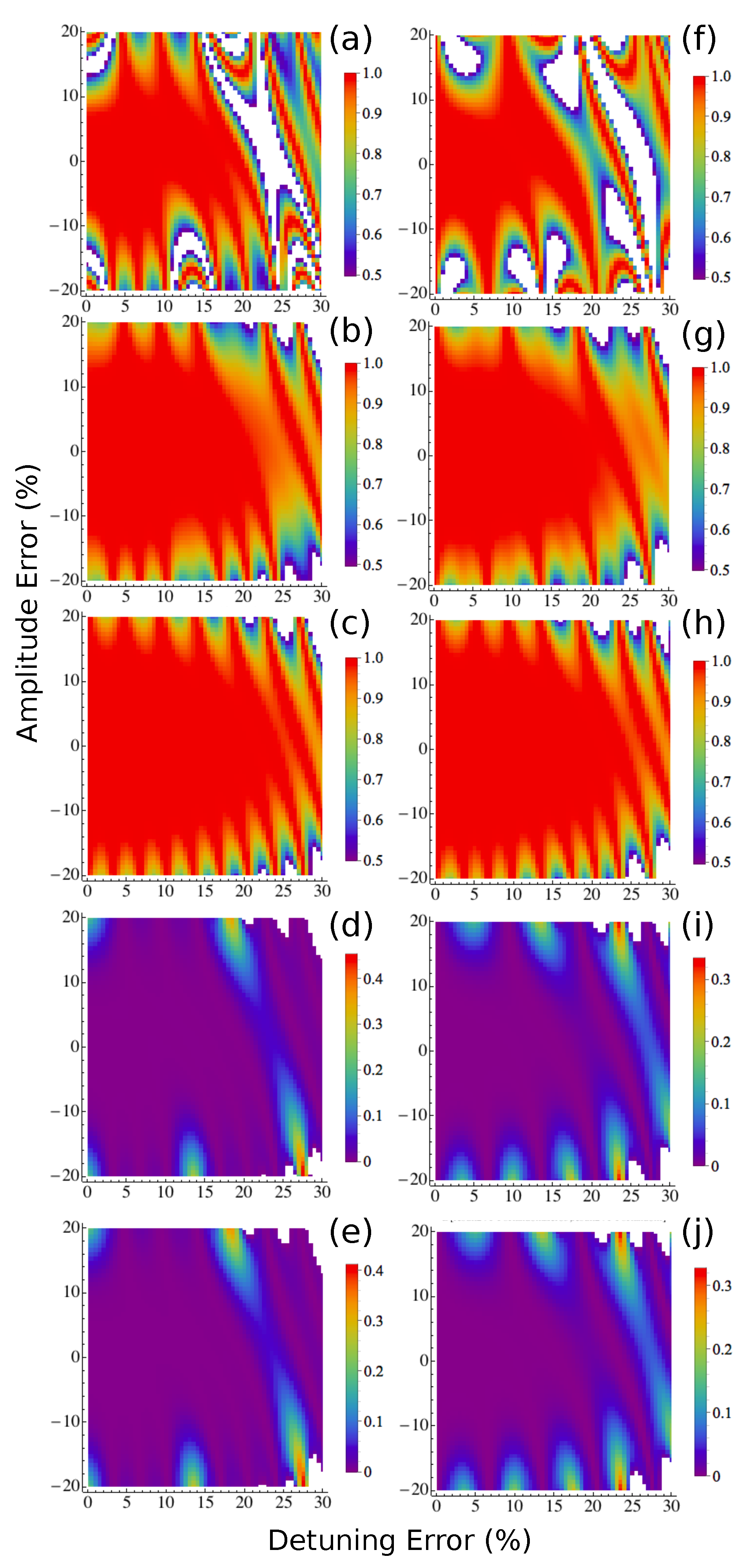
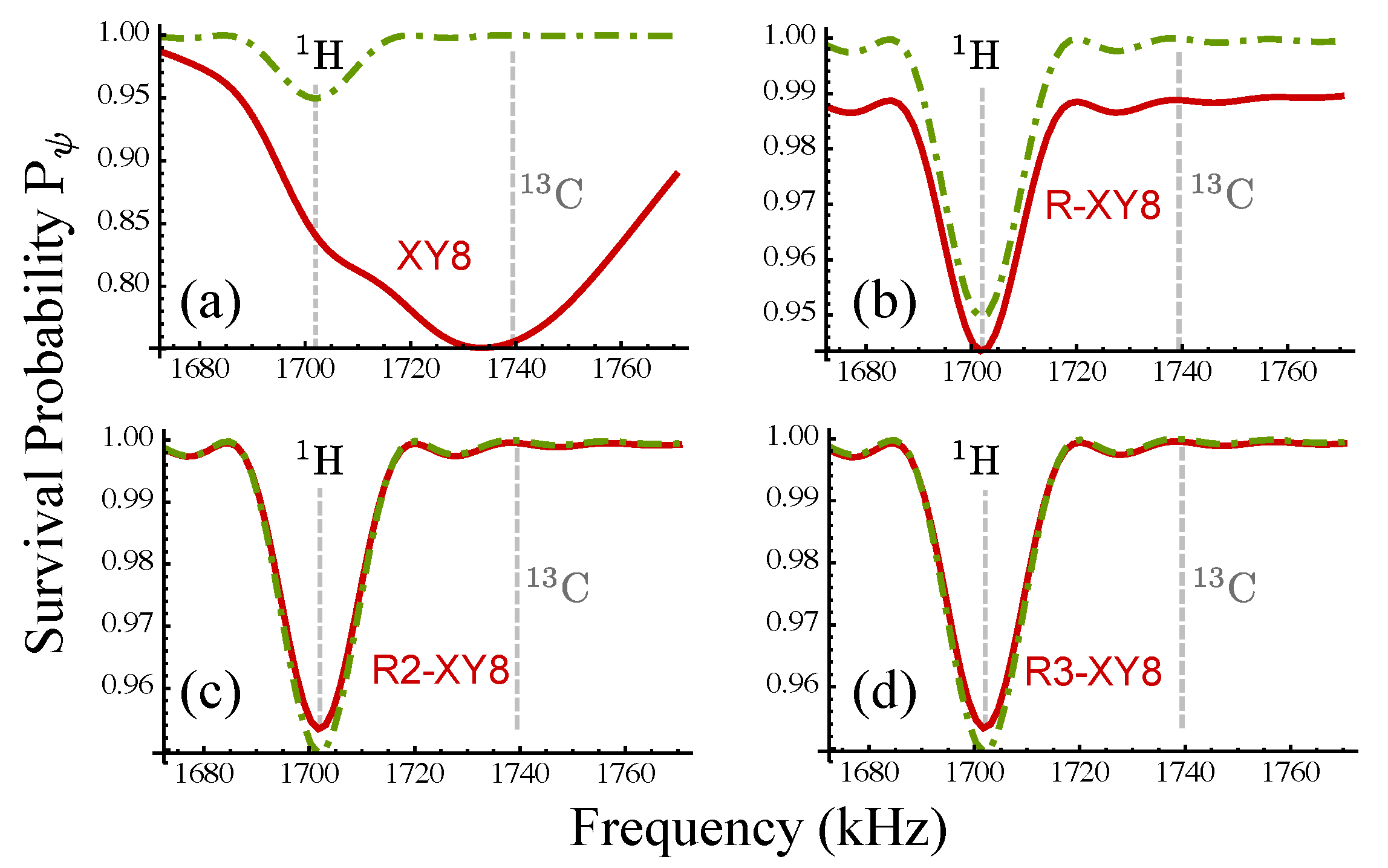
2.2. Comparison of Different Protocol Performances
3. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| NV | nitrogen-vacancy |
| DD | dynamical decoupling |
| CP | Carr–Purcell |
References
- Viola, L.; Lloyd, S. Dynamical suppression of decoherence in two-state quantum systems. Phys. Rev. A 1998, 58, 2733. [Google Scholar] [CrossRef]
- Yang, W.; Wang, Z.-Y.; Liu, R.-B. Preserving qubit coherence by dynamical decoupling. Front. Phys. 2010, 6, 2–14. [Google Scholar] [CrossRef]
- Suter, D.; Álvarez, G.A. Colloquium: Protecting quantum information against environmental noise. Rev. Mod. Phys. 2016, 88, 041001. [Google Scholar] [CrossRef]
- Cai, J.M.; Retzker, A.; Jelezko, F.; Plenio, M.B. A large-scale quantum simulator on a diamond surface at room temperature. Nat. Phys. 2013, 9, 168–173. [Google Scholar] [CrossRef]
- Rondin, L.; Tetienne, J.P.; Hingant, T.; Roch, J.F.; Maletinsky, P.; Jacques, V. Magnetometry with nitrogen-vacancy defects in diamond. Rep. Prog. Phys. 2014, 77, 056503. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Jelezko, F.; Plenio, M.B.; Weil, T. Diamond Quantum Devices in Biology. Angew. Chem. Int. Ed. 2016, 55, 6586–6598. [Google Scholar] [CrossRef] [PubMed]
- Suter, D.; Jelezko, F. Single-spin magnetic resonance in the nitrogen-vacancy center of diamond. Prog. Nucl. Magn. Reson. Spectrosc. 2017, 98–99, 50–62. [Google Scholar] [CrossRef]
- Degen, C.L.; Reinhard, F.; Cappellaro, P. Quantum sensing. Rev. Mod. Phys. 2017, 89, 035002. [Google Scholar] [CrossRef]
- Doherty, M.W.; Manson, N.B.; Delaney, P.; Jelezko, F.; Wrachtrup, J.; Hollenberg, L.C.L. The nitrogen-vacancy colour centre in diamond. Phys. Rep. 2013, 528, 1–45. [Google Scholar] [CrossRef]
- Ryan, C.A.; Hodges, J.S.; Cory, D.G. Robust Decoupling Techniques to Extend Quantum Coherence in Diamond. Phys. Rev. Lett. 2010, 105, 200402. [Google Scholar] [CrossRef]
- de Lange, G.; Wang, Z.; Riste, D.; Dobrovitski, V.; Hanson, R. Universal Dynamical Decoupling of a Single Solid-State Spin from a Spin Bath. Science 2010, 330, 60–63. [Google Scholar] [CrossRef] [PubMed]
- Bar-Gill, N.; Pham, L.M.; Jarmola, A.; Budker, D.; Walsworth, R.L. Solid-state electronic spin coherence time approaching one second. Nat. Commun. 2013, 4, 1743. [Google Scholar] [CrossRef] [PubMed]
- Abobeih, M.H.; Cramer, J.; Bakker, M.A.; Kalb, N.; Markham, M.; Twitchen, D.J.; Taminiau, T.H. One-second coherence for a single electron spin coupled to a multi-qubit nuclear-spin environment. Nat. Commun. 2018, 9, 2552. [Google Scholar] [CrossRef] [PubMed]
- de Lange, G.; Riste, D.; Dobrovitski, V.V.; Hanson, R. Single-Spin Magnetometry with Multipulse Sensing Sequences. Phys. Rev. Lett. 2011, 106, 080802. [Google Scholar] [CrossRef]
- Taminiau, T.H.; Wagenaar, J.J.T.; van der Sar, T.; Jelezko, F.; Dobrovitski, V.V.; Hanson, R. Detection and Control of Individual Nuclear Spins Using a Weakly Coupled Electron Spin. Phys. Rev. Lett. 2012, 109, 137602. [Google Scholar] [CrossRef]
- Kolkowitz, S.; Unterreithmeier, Q.P.; Bennett, S.D.; Lukin, M.D. Sensing Distant Nuclear Spins with a Single Electron Spin. Phys. Rev. Lett. 2012, 109, 137601. [Google Scholar] [CrossRef]
- Zhao, N.; Honert, J.; Schmid, B.; Klas, M.; Isoya, J.; Markham, M.; Twitchen, D.; Jelezko, F.; Liu, R.B.; Fedder, H.; et al. Sensing single remote nuclear spins. Nat. Nanotechnol. 2012, 7, 657. [Google Scholar] [CrossRef]
- Müller, C.; Kong, X.; Cai, J.-M.; Melentijevic, K.; Stacey, A.; Markham, M.; Isoya, J.; Pezzagna, S.; Meijer, J.; Du, J.; et al. Nuclear magnetic resonance spectroscopy with single spin sensitivity. Nat. Commun. 2014, 5, 4703. [Google Scholar] [CrossRef]
- Casanova, J.; Wang, Z.-Y.; Plenio, M.B. Noise-Resilient Quantum Computing with a Nitrogen-Vacancy Center and Nuclear Spins. Phys. Rev. Lett. 2016, 117, 130502. [Google Scholar] [CrossRef]
- Wang, Z.-Y.; Casanova, J.; Plenio, M.B. Delayed entanglement echo for individual control of a large number of nuclear spins. Nat. Commun. 2017, 8, 14660. [Google Scholar] [CrossRef]
- Haase, J.F.; Wang, Z.-Y.; Casanova, J.; Plenio, M.B. Soft Quantum Control for Highly Selective Interactions among Joint Quantum Systems. Phys. Rev. Lett. 2018, 121, 050402. [Google Scholar] [CrossRef] [PubMed]
- Lang, J.E.; Broadway, D.A.; Hall, G.A.L.W.L.T.; Stacey, A.; Hollenberg, L.L.; Monteiro, T.S.; Tetienne, J.-P. Quantum Bath Control with Nuclear Spin State Selectivity via Pulse-Adjusted Dynamical Decoupling. Phys. Rev. Lett. 2019, 123, 210401. [Google Scholar] [CrossRef] [PubMed]
- Bradley, C.E.; Randall, J.; Abobeih, M.H.; Berrevoets, R.C.; Degen, M.J.; Bakker, M.A.; Markham, M.; Twitchen, D.J.; Taminiau, T.H. A ten-qubit solid-state spin register with quantum memory up to one minute. Phys. Rev. X 2019, 9, 031045. [Google Scholar] [CrossRef]
- Zhao, N.; Hu, J.-L.; Ho, S.-W.; Wan, J.T.K.; Liu, R.B. Atomic-scale magnetometry of distant nuclear spin clusters via nitrogen-vacancy spin in diamond. Nat. Nanotechnol. 2011, 6, 242. [Google Scholar] [CrossRef]
- Shi, F.; Kong, X.; P, P.W.; Kong, F.; Zhao, N.; Liu, R.B.; Du, J. Sensing and atomic-scale structure analysis of single nuclear-spin clusters in diamond. Nat. Phys. 2014, 10, 21–25. [Google Scholar] [CrossRef]
- Wang, Z.-Y.; Haase, J.F.; Casanova, J.; Plenio, M.B. Positioning nuclear spins in interacting clusters for quantum technologies and bioimaging. Phys. Rev. B 2016, 93, 174104. [Google Scholar] [CrossRef]
- Abobeih, M.H.; Randall, J.; Bradley, C.E.; Bartling, H.P.; Bakker, M.A.; Degen, M.J.; Markham, M.; Twitchen, D.J.; Taminiau, T.H. Atomic-scale imaging of a 27-nuclear-spin cluster using a quantum sensor. Nature 2019, 576, 411–415. [Google Scholar] [CrossRef]
- Gullion, T.; Barker, D.B.; Conradi, M.S. New, compensated Carr-Purcell sequences. J. Magn. Reson. 1990, 89, 479–484. [Google Scholar] [CrossRef]
- Casanova, J.; Wang, Z.-Y.; Haase, J.F.; Plenio, M.B. Robust dynamical decoupling sequences forindividual-nuclear-spin addressing. Phys. Rev. A 2015, 92, 042304. [Google Scholar] [CrossRef]
- Genov, G.T.; Schraft, D.; Vitanov, N.V.; Halfmann, T. Arbitrarily Accurate Pulse Sequences for Robust Dynamical Decoupling. Phys. Rev. Lett. 2017, 118, 133202. [Google Scholar] [CrossRef]
- Loretz, M.; Boss, J.M.; Rosskopf, T.; Mamin, H.J.; Rugar, D.; Degen, C.L. Spurious Harmonic Response of Multipulse Quantum Sensing Sequences. Phys. Rev. X 2015, 5, 021009. [Google Scholar] [CrossRef]
- Haase, J.F.; Wang, Z.-Y.; Casanova, J.; Plenio, M.B. Pulse-phase control for spectral disambiguation in quantum sensing protocols. Phys. Rev. A 2016, 94, 032322. [Google Scholar] [CrossRef]
- Lang, J.E.; Casanova, J.; Wang, Z.-Y.; Plenio, M.B.; Monteiro, T.S. Enhanced Resolution in Nanoscale NMR via Quantum Sensing with Pulses of Finite Duration. Phys. Rev. Appl. 2017, 7, 054009. [Google Scholar] [CrossRef]
- Shu, Z.; Zhang, Z.; Cao, Q.; Yang, P.; Plenio, M.B.; Müller, C.; Lang, J.; Tomek, N.; Naydenov, B.; McGuinness, L.P.; et al. Unambiguous nuclear spin detection using an engineered quantum sensing sequence. Phys. Rev. A 2017, 96, 051402. [Google Scholar] [CrossRef]
- Wang, Z.-Y.; Lang, J.E.; Schmitt, S.; Lang, J.; Casanova, J.; McGuinness, L.; Monteiro, T.S.; Jelezko, F.; Plenio, M.B. Randomization of Pulse Phases for Unambiguous and Robust Quantum Sensing. Phys. Rev. Lett. 2019, 122, 200403. [Google Scholar] [CrossRef]
- Cai, J.M.; Naydenov, B.; Pfeiffer, R.; McGuinness, L.P.; Jahnke, K.D.; Jelezko, F.; Plenio, M.B.; Retzker, A. Robust dynamical decoupling with concatenated continuous driving. New J. Phys. 2012, 14, 113023. [Google Scholar] [CrossRef]
- Souza, A.M.; Álvarez, G.A.; Suter, D. Robust dynamical coupling. Philos. Trans. R. Soc. A 2012, 370, 4748. [Google Scholar] [CrossRef]
- Carr, H.Y.; Purcell, E.M. Effects of diffusion on free precession in nuclear magnetic resonance experiments. Phys. Rev. 1954, 94, 630. [Google Scholar] [CrossRef]




© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Casanova, J.; Plenio, M.B. Enhancing the Robustness of Dynamical Decoupling Sequences with Correlated Random Phases. Symmetry 2020, 12, 730. https://doi.org/10.3390/sym12050730
Wang Z, Casanova J, Plenio MB. Enhancing the Robustness of Dynamical Decoupling Sequences with Correlated Random Phases. Symmetry. 2020; 12(5):730. https://doi.org/10.3390/sym12050730
Chicago/Turabian StyleWang, Zhenyu, Jorge Casanova, and Martin B. Plenio. 2020. "Enhancing the Robustness of Dynamical Decoupling Sequences with Correlated Random Phases" Symmetry 12, no. 5: 730. https://doi.org/10.3390/sym12050730
APA StyleWang, Z., Casanova, J., & Plenio, M. B. (2020). Enhancing the Robustness of Dynamical Decoupling Sequences with Correlated Random Phases. Symmetry, 12(5), 730. https://doi.org/10.3390/sym12050730