Optimization Analysis of the N Policy M/G/1 Queue with Working Breakdowns

Abstract
1. Introduction
- (1)
- We derive several system performance measures, as well as the stability condition of this queueing model;
- (2)
- We establish a cost model to find the optimal threshold N, the optimal service rate during the normal period, and the optimal service rate during the working breakdown period under the stability condition;
- (3)
- We apply the two-stage optimization method to search for the minimum expected cost. Numerical examples are given to illustrate the effectiveness of the two-stage optimization method. Moreover, a sensitivity analysis is also performed.
2. Model Descriptions
Practical Justification of the Model
3. Steady-State Results
3.1. Steady-State Probability Equations
3.2. Probability Generating Function
3.3. Stability Condition
4. System Performance Measures
4.1. Computations for , , and
4.2. Computations for , , , and
- (1)
- Idle period I: the length of time during which the server is turned off or is removed from the system;
- (2)
- Busy period B: the length of time during which the server is turned on and in operation and customers are being served;
- (3)
- Partial breakdown period D: the length of time during which the server is broken down and customers are being served;
- (4)
- Busy cycle C: the length of time from the beginning of an idle period to the beginning of the next idle period.
4.3. Computations for and
5. Cost Optimization Analysis
5.1. Cost Function
5.2. Direct Search Method
5.3. Two-Stage Optimization Method
- Step 1.
- Set , and .
- Step 2.
- Set the initial trial solution for , convergence tolerance , inverse Hessian approximation , , and initialize by the direct search method.
- Step 3.
- Compute .
- Step 4.
- , , , ; repeat until (the Wolfe conditions).
- Step 5.
- Find the new trial solution , and according to , where is calculated from a line search method to satisfy the Wolfe conditions (see Nocedal and Wright [18]); that is,
- Step 6.
- Set and repeat Steps 3-5 if , , or , where , , and are the tolerances; otherwise, go to Step 7.
- Step 7.
- Find the minimum value , where .
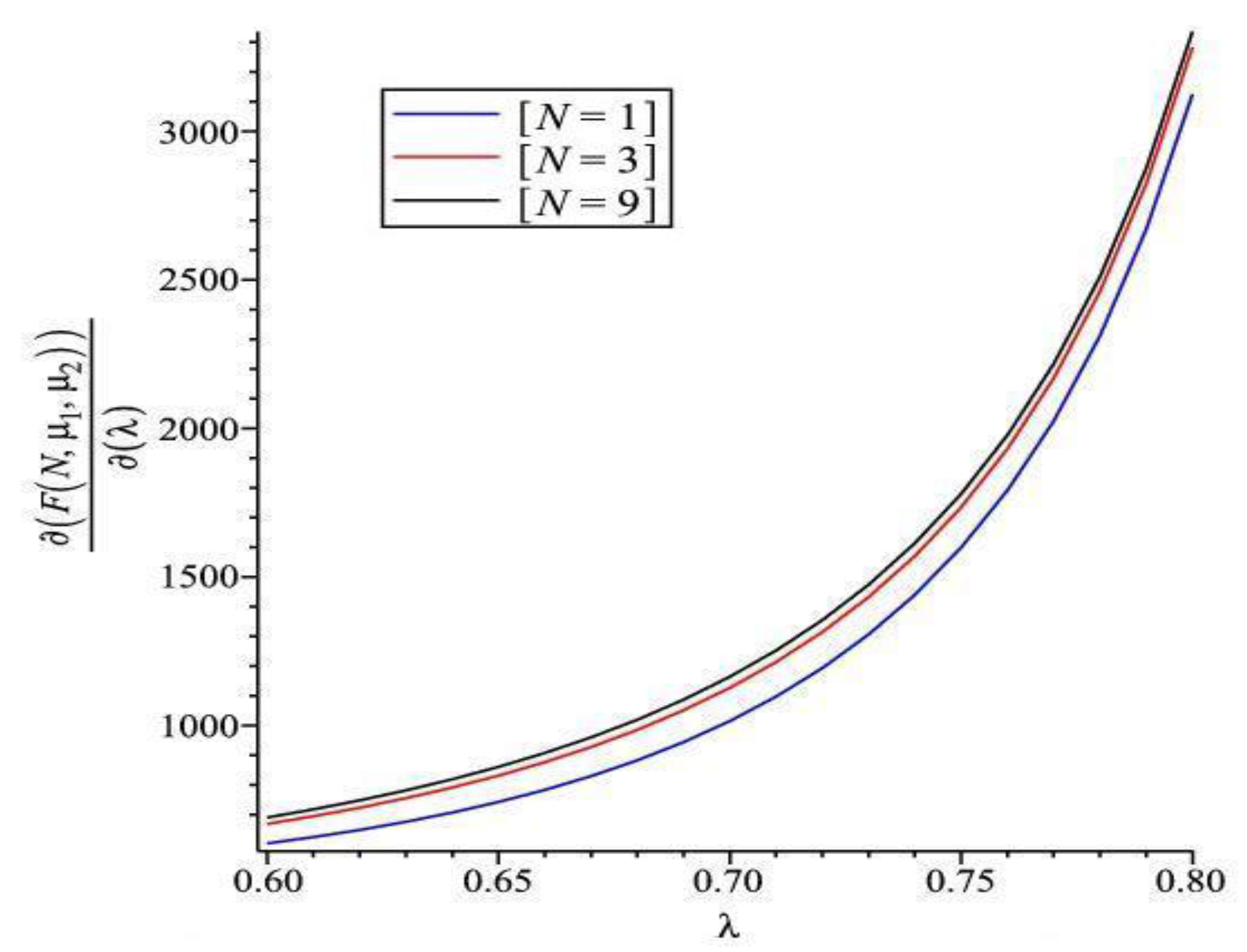
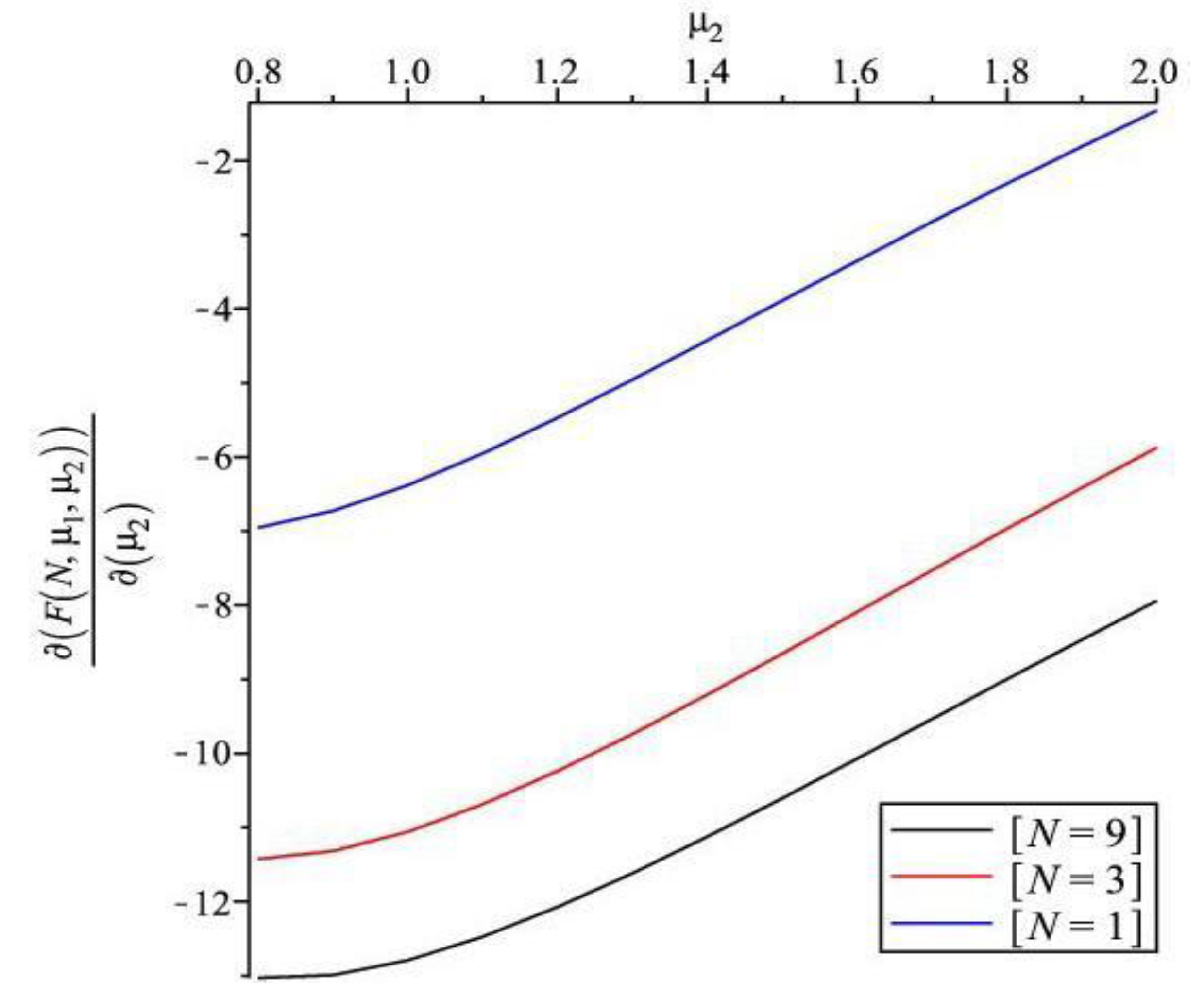
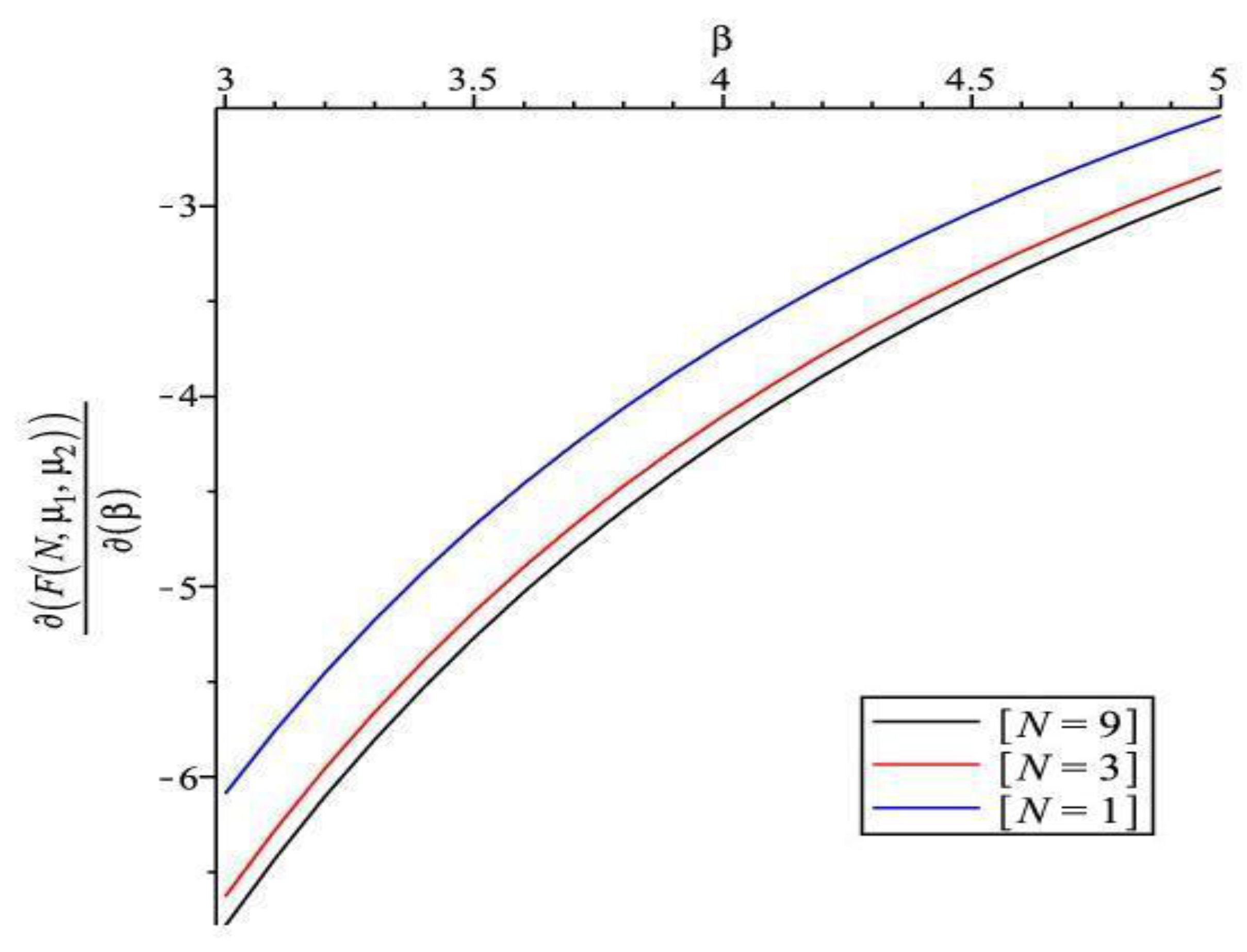
5.4. Sensitivity Analysis for the Expected Cost Function
- Case 1: , , , ; select different values of 1, 3, 9, and vary from 0.6 to 0.8.
- Case 2: , , , ; choose different values of 1, 3, 9, and vary from 1.0 to 2.0.
- Case 3: , , , ; select different values of 1, 3, 9, and vary from 0.8 to 2.0.
- Case 4: , , , ; select different values of 1, 3, 9, and vary from 0.2 to 0.5.
- Case 5: , , , ; choose different values of 1, 3, 9, and vary from 3.0 to 5.0.
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yadin, M.; Naor, P. Queueing systems with a removable service station. Oper. Res. Quar. 1963, 14, 393–405. [Google Scholar] [CrossRef]
- Jayachitra, P.; Albert, A.J. Recent developments in queueing models under N-policy: A short survey. Int. J. Math. Arch. 2014, 5, 227–233. [Google Scholar]
- Kalidass, K.; Kasturi, R. A queue with working breakdowns. Comput. Ind. Eng. 2012, 63, 779–783. [Google Scholar] [CrossRef]
- Liou, C.-D. Markovian queue optimisation analysis with an unreliable server subject to working breakdowns and impatient customers. Int. J. Syst. Sci. 2015, 46, 2165–2182. [Google Scholar] [CrossRef]
- Kim, B.K.; Lee, D.H. The M/G/1 queue with disasters and working breakdowns. Appl. Math. Modell. 2014, 38, 1788–1798. [Google Scholar] [CrossRef]
- Wang, K.-H.; Ke, J.-C. Control policies of an M/G/1 queueing system with a removable and non-reliable server. Inter. Trans. Oper. Res. 2002, 9, 195–212. [Google Scholar] [CrossRef]
- Wang, K.-H. Optimal operation of a Markovian queueing system with a removable and non-reliable server. Microelectron. Reliab. 1995, 35, 1131–1136. [Google Scholar] [CrossRef]
- Ke, J.-C.; Pearn, W.L. Optimal management policy for heterogeneous arrival queueing systems with server breakdowns and vacations. Qual. Tech. Quant. Manag. 2004, 1, 149–162. [Google Scholar] [CrossRef]
- Wang, K.-H.; Wang, T.-Y.; Pearn, W.L. Maximum entropy analysis to the N policy M/G/1 queueing system with server breakdowns and general startup times. Appl. Math. Comput. 2005, 165, 45–61. [Google Scholar] [CrossRef]
- Ke, J.-C.; Lin, C.-H. Maximum entropy approach for batch-arrival queue under N policy with an un-reliable server and single vacation. J. Comput. Appl. Math. 2008, 221, 1–15. [Google Scholar] [CrossRef]
- Wang, K.-H.; Wang, T.-Y.; Pearn, W.L. Optimal control of the N policy M/G/1 queueing system with server breakdowns and general startup times. Appl. Math. Modell. 2007, 31, 2199–2212. [Google Scholar] [CrossRef]
- Jain, M.; Bhargava, C. N-policy machine repair system with mixed standbys and unreliable server. Qual. Tech. Quant. Manag. 2009, 6, 171–184. [Google Scholar] [CrossRef]
- Vemuri, V.K.; Boppana, V.S.N.H.P.; Kotagiri, C.; Bethapudi, R.T. Optimal strategy analysis of an N-policy two-phase MX/M/1 queueing system with server startup and breakdowns. OPSEARCH 2011, 48, 109–122. [Google Scholar] [CrossRef]
- Singh, C.J.; Jain, M.; Kumar, B. Analysis of queue with two phases of service and m phases of repair for server breakdown under N-policy. Int. J. Serv. Oper. Manag. 2013, 16, 373–406. [Google Scholar] [CrossRef]
- Yang, D.-Y.; Ke, J.-C. Cost optimization of a repairable M/G/1 queue with a randomized policy and single vacation. Appl. Math. Modell. 2014, 38, 5113–5125. [Google Scholar] [CrossRef]
- Chen, W.L.; Wang, K.-H. Reliability analysis of a retrial machine repair problem with warm standbys and a single server with N-policy. Reliab. Eng. Syst. Saf. 2018, 180, 476–486. [Google Scholar] [CrossRef]
- Cox, D.R. The analysis of non-Markovian stochastic processes by the inclusion of supplementary variables. Proc. Camb. Philos. Soc. 1955, 51, 433–441. [Google Scholar] [CrossRef]
- Nocedal, J.; Wright, S.J. Numerical Optimization; Springer Series in Operations Research; Springer: New York, NY, USA, 1999. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.4 | 339.12 | 316.37 | 326.74 | 345.78 | 368.51 | 393.24 | 419.20 | 446.00 | 473.39 | 501.23 | |
| 1.0 | 522.29 | 469.43 | 468.16 | 480.59 | 498.97 | 520.59 | 544.23 | 569.24 | 595.22 | 621.92 | |
| 2.0 | 926.11 | 921.24 | 936.73 | 958.26 | 982.65 | 1008.68 | 1035.73 | 1063.46 | 1091.67 | 1120.23 | |
| (0.4,0.2,0.3) | (1.0,0.2,0.3) | (2.0,0.2,0.3) | (1.0,0.25,0.3) | (1.0,0.3,0.3) | (0.4,0.2,0.4) | (0.4,0.2,0.5) | |
| 2 | 3 | 4 | 3 | 3 | 2 | 2 | |
| 3.061 | 4.277 | 5.313 | 4.336 | 4.387 | 2.944 | 2.889 | |
| 0.904 | 2.037 | 3.831 | 2.231 | 2.388 | 0.765 | 0.600 | |
| 310.70 | 448.78 | 591.93 | 458.86 | 467.79 | 302.07 | 296.21 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yen, T.-C.; Wang, K.-H.; Chen, J.-Y. Optimization Analysis of the N Policy M/G/1 Queue with Working Breakdowns. Symmetry 2020, 12, 583. https://doi.org/10.3390/sym12040583
Yen T-C, Wang K-H, Chen J-Y. Optimization Analysis of the N Policy M/G/1 Queue with Working Breakdowns. Symmetry. 2020; 12(4):583. https://doi.org/10.3390/sym12040583
Chicago/Turabian StyleYen, Tseng-Chang, Kuo-Hsiung Wang, and Jia-Yu Chen. 2020. "Optimization Analysis of the N Policy M/G/1 Queue with Working Breakdowns" Symmetry 12, no. 4: 583. https://doi.org/10.3390/sym12040583
APA StyleYen, T.-C., Wang, K.-H., & Chen, J.-Y. (2020). Optimization Analysis of the N Policy M/G/1 Queue with Working Breakdowns. Symmetry, 12(4), 583. https://doi.org/10.3390/sym12040583