Abstract
In this article, we focus on improving the sub-gradient extra-gradient method to find a solution to the problems of pseudo-monotone equilibrium in a real Hilbert space. The weak convergence of our method is well-established based on the standard assumptions on a bifunction. We also present the application of our results that enable to solve numerically the pseudo-monotone and monotone variational inequality problems, in addition to the particular presumptions required by the operator. We have used various numerical examples to support our well-proved convergence results, and we can show that the proposed method involves a considerable influence over-running time and the total number of iterations.
1. Introduction
Equilibrium problems involve many mathematical problems as a particular instance, such as minimization problems, complementarity problems, problems of fixed point, Non-cooperative games of Nash equilibrium problem, problems of saddle point and problem of vector minimization and the variational inequality problems (VIP) (for more details follow e.g., [1,2,3,4]). As an explanation of the equilibrium problem, we can also recognize this problem as a Ky Fan inequality, for the infer that Fan [5] produces research and proposes a specific condition on a bifunction for the presence of a solution of an equilibrium problem. As long as we know, Mu and Oettli [6] established this particular notion “equilibrium problem” in 1992 and was advanced further by Blum and Oettli [1]. Several authors have achieved and generalized many results with regard to the existence of an equilibrium problem solution (e.g., see [7,8,9,10,11] and the references therein). The development of new iterative methods and the examination of their converging analysis are among the most effective and valuable research directions in equilibrium theory. Several numerical results for solving the problem of equilibrium in different abstract spaces have been established (for instance, see [12,13,14,15,16,17,18,19,20,21,22,23,24,25,26,27]).
Two effective techniques are exceptionally well recognized due to their numerical efficiency i.e., the proximal point method [28] and the principle of auxiliary problem [29] are used to handle the problems of equilibrium. The proximal point method theory was basically formed by Martinet [30] in the case of the problem of monotone variational inequality and afterwards, this was enhanced by Rockafellar [31] in the case of monotone operators. Moudafi [28] provided the proximal point method for monotone equilibrium problems. This method is usually dealt with equilibrium problems that must contain a monotone bifunction. As a following, each sub-level problem is converted into a strong monotone equilibrium problem so that we can obtain its unique solution. However, in the case that the bifunction is a more general particular pseudo-monotone, we are not in a position to solve the equilibrium problem. Another important concept is the auxiliary problem principle, that is established on the understanding of forming a new problem that is analogous and generally simpler to carry out with respect to our initial problem. Cohen originally established this rule [32] for the problems of optimization, and further extended it to solve variational inequality problems [33]. Additionally, Mastroeni [29] introduced this theory in the case of problems of equilibrium engaged through strong monotone bifunction. On the other side, let us discuss inertial-type methods, which are based on said heavy ball methods of the second-order time dynamical system. In order to solve the problem of smooth convex minimization, Polyak [34] proposed an iterative scheme that would involve inertial extrapolation as a boost ingredient to the convergence of an iterative sequence. This approach is typically a two-step iterative scheme, and the next iteration is computed by taking the previous two iterations and can be referred to as a strategy of pacing up the iterative sequence ([34,35]). In the case of equilibrium problems, Moudafi initiated and proposed an inertial-type approach, specifically the second-order differential proximal method [36]. Such inertial methods are basically used to accelerate the iterative process to the desired solution. Numerical reviews suggest that inertial effects often improve the performance of the algorithm in terms of the number of iterations and time of execution in this context. There are many methods are already established for the different classes of variational inequality problem for more details see, [37,38,39,40,41].
In this study, we follow the Dadashi et al. sub-gradient extra-gradient method [42] and the method of Censor [43] and present their enhancement by implementing inertial technique. We are coming up with a modified sub-gradient extra-gradient method to solve problems of pseudo-monotone equilibrium in the setting of a real Hilbert space. The stepsize is not specified in our proposed method but is built up by an explicit formula based on some previous iterations. We are formulating a weak convergence theorem with regard to our recommended method of handling the problem of equilibriums under specific conditions. In addition, some application in the problem of variational inequality for monotone operator is considered and many numerical examples in finite and infinite dimensions are also taken in order to support the appropriateness of our proposed results.
The rest of this article will be structured according to the following: In Section 2, We are giving some concepts and relevant findings. Section 3, contains our algorithm involving pseudo-monotone bifunction, and provides the weak convergence result. Section 4, includes the application of our proposed results in variational inequality problems. Section 5, set out the numerical examples to demonstrate the algorithmic performance.
2. Preliminaries
Now we are including some of the important lemmas, definitions and other concepts that will be used throughout the convergence analysis. We were going to make use of that K as a closed, convex subset of the Hilbert space The notion and stands for the inner product and norm on the Hilbert space, receptively. We note down to mention that the sequence weakly converges to In addition, indicates the solution set of an (EP) on K and is an arbitrary element of or the solution set of a variational inequality problem G over C.
Definition 1.
[1] Let K to be a convex, closed and nonempty subset of and be a bifunction such that for all The equilibrium problem respect to a bifunction f on K is reported in the following manner:
Next, we consider certain notions of a bifunction monotonicity (see [1,44] for further information).
Definition 2.
The bifunction on K for is said to be:
- (i)
- strongly monotone if
- (ii)
- monotone if
- (iii)
- strongly pseudo-monotone if
- (iv)
- pseudo-monotone if
- (v)
- satisfying the Lipschitz-type condition on K if there are two real numbers such that
Remark 1.
As a consequence, we have the following implications from the above definition.
Definition 3.
Assume is a convex function and subdifferential of g at is define as follows:
Definition 4.
The normal cone of K at is
Definition 5.
[45] A metric projection of u onto a closed, convex subset K of is define as
Lemma 1.
[46] Let be the metric projection from onto Thus, we have
- (i)
- For all
- (ii)
- if and only if
This section ends with a few important lemmas that are useful in examining the convergence of our proposed results.
Lemma 2.
[47] Let K be a nonempty, closed and convex subset of a real Hilbert space and be a convex, subdifferentiable with lower semicontinuous function on Moreover, y is a minimizer of a function g if and only if where and denotes the subdifferential of g at y and the normal cone of K at y respectively.
Lemma 3
([48], Page 31). For every and , then the following relation is true:
Lemma 4.
[49] Let , and are sequences in such that
while such that for all Thus, the followings items are true:
- with
Lemma 5.
[50] Let be a sequence in and such that
- For each exists;
- All sequentially weak cluster point of lies in K;
Then, weakly converges to a point in
Lemma 6.
[42] Assume are sequences in in such a way that ∀ Suppose that and Then, there is a sequence such that and
Due to Lipschitz-type condition on a bifunction f through above lemma, we have the subsequent inequality.
Corollary 1.
Assume f satisfy a Lipschitz-type condition on K through positive constants and Let where and Then, there is a real number ζ such that
and where
Assumption 1.
Let a bifunction satisfy the following conditions:
- for all and f is pseudomontone on a set
- f satisfy the Lipschitz-type condition on through positive constants and
- for each and satisfy
- need to be convex and subdifferentiable on K for arbitrary
3. An Inertial Sub-Gradient Extra-Gradient Method and Its Convergence Analysis
Now we are presenting our first main algorithm and prove a weak convergence theorem to find a solution to the equilibrium problems (EP) involving pseudo-montone bifunction. The Algorithm 1 in details is given below.
| Algorithm 1 Inertial sub-gradient extra-gradient method for pseudomontone (EP). |
|
Remark 2.
By Corollary 1, in Equation (1) is well-defined and
Now, we prove the validity of stopping criterion with regard to Algorithm 1.
Lemma 7.
If in Algorithm 1, then
Proof.
By the definition of with Lemma 2, we have
Thus, there exists and so that Due to hypothesis implies that Thus, we have
By implies and through above expression, we obtain
By and the subdifferential definition, we obtain
Lemma 8.
Let bifunction follows the conditions (-). Thus, for each we could have
Proof.
By Lemma 2 with definition of we have
From above implies that and such that
Thus, we have
Since then for all This gives
By we can obtain
By substituting into expression (7), we get
Since then implies that and due to the pseudomonotonicity of a bifunction f we can get Therefore, from (8), we get
Since and then by the definition of implies that Thus, we have
Since with we gain
We have the following facts:
From the above last two inequalities and Equation (14), we obtain
□
Theorem 1.
Let a bifunction satisfying the assumptions (-). Thus, for each the sequence and generated by Algorithm 1, converges weakly to
Proof.
By Lemma 8, we write
Thus, for above expression implies that
By in Algorithm 1, we get
Furthermore, by the definition and follows the Cauchy inequality, we have
Further, we put
Next, we compute
We obtain the above last inequality from Equation (21) and
By our hypothesis and for some we get
So the above implies that is non-increasing. From the definition of we have
In addition, from we have
The above implies that
From (18) and (30) we can obtain
By expression (20) with Lemma 4 and implies that
Next, we show that It follows from Lemma 8, for such that
The above implies that
The above expression with (33) gives that
The above implies that for each the exists and also the sequences , and are bounded. Now, we prove that all weak cluster point respect to the sequence lies inside in For this we take z is any weak cluster point of , i.e., there is a subsequence, indicated by , of converges weakly to Due to implies that too converges weakly to z and Let prove that By the expression (7), (2) and (13), we have
for any element Moreover, from (31), (35), (37) and the boundness of implies that right-hand side of above inequity appears may to zero as . Using condition () in (Assumption 1) and we have
Given that and , for all It gives that Finally, we establish that the sequence converges weakly to by using the Lemma 5. This completes the proof. □
If we use in the Algorithm 1, we get an algorithm that appears in the Dadashi et al. [42].
Corollary 2.
Let a bifunction satisfying the assumptions (–). Thus, for every the sequence and are generated as follows:
- i.
- Given and
- ii.
- Computewith where Moreover, the stepsize sequence is updated as follows:The sequence and weakly converges to the solution
4. Solution for Variational Inequality Problems
We state the variational inequality problem as follows:
A operator is called
- monotone on K if
- pseudo-monotone on K if
- L-Lipschitz continuous on K if
Note: if we take the bifunction for all then the equilibrium problem convert into the above variational inequality problem with By definitions of in the Algorithm 1 and the above definition of bifunction f such that
Due to and by subdifferential definition, we obtain
and consequently That is why we have
Similarly to the expression (40), in Algorithm 1 convert into
Assumption 2.
Suppose that G satisfying the following assumptions:
- .
- G is monotone on K and is nonempty;
- .
- G is pseudo-monotone on K and is nonempty;
- .
- G is L-Lipschitz continuous on K for constant
- .
- for every and satisfying
As a result, the inertial sub-gradient extra-gradient Algorithm 1 with Theorem 1 covert to the subsequent result for solving the variational inequality problems.
Corollary 3.
Assume that is satisfying () as in Assumption 2. Let and be the sequences generated as follows:
- i.
- Choose and non-decreasing sequence
- ii.
- Given and computewhere Moreover, the stepsize sequence is updated as follows:
The sequence and weakly converges to the solution of
Corollary 4.
Assume that is satisfying () as in Assumption 2. Let and be the sequences generated as follows:
- i.
- Choose and
- ii.
- Given and computewhere Moreover, the stepsize sequence is updated as follows:
The sequence and weakly converges to the solution of
Next, we consider that provided G is monotone, assumption () can be removed. The assumption () is needed to express satisfy the assumption (). In addition, condition () is used to prove , see description (39). This means that condition () is employed to show Next, we are continuing to show by applying the monotonicity of operator This means that
By and expression (38), we get
Therefore implies that ∀ Let for all Due to the convexity of K, for each Then, we can write
That is for every From as and the continuity of we reach for all this shows that
Corollary 5.
Assume that is satisfying () as in Assumption 2. Let and are sequences created as follows:
- i.
- Take and non-decreasing sequence
- ii.
- Given and computewhere Moreover, the stepsize sequence is updated as follows:
Then, the sequence and weakly converges to the solution of
Corollary 6.
Assume that is satisfying () as in Assumption 2. Let and be the sequences generated as follows:
- i.
- Choose and
- ii.
- Given and computewhere Moreover, the stepsize sequence is updated as follows:
Then, the sequence and weakly converges to the solution of
5. Computational Experiment
Some numerical results will be presented to show the efficiency of our above-mentioned methods. The MATLAB codes run in MATLAB version 9.5 (R2018b) on a PC Intel(R) Core(TM)i5-6200 CPU @ 2.30 GHz 2.40 GHz, RAM 8.00 GB. During all these examples we use and y-axes display error term while the x-axis refers to the total number of iterations or the running time (in seconds). Moreover, for our proposed Algorithm 1 (Shortly, Int.EgA) with error term and for Tran et al. [23] (Shortly, Tran.EgA) and Dadashi et al. [42] (Shortly, Dadshi.EgA) with error term
5.1. Example 1
Suppose that there will be n firms which generates the same product. Let u stands for a vector in which the each entry denote the amount of the product manufactured by the firm i. We take the price P as a decreasing affine function that depends upon on the value of i.e., where The profit function for each firm i is define by where is tax and producing cost Assume is set of strategies belongs to each firm and the strategy scheme for the whole model take the form as In fact, each firm aims to achieve its maximum revenue by taking the corresponding level of growth on the assumption that production of the other companies is an input parameter. The technique often utilized to deal such type of model focuses mainly on the well-known Nash equilibrium concept. We would like to remind that point is the point of equilibrium of the model if
with the vector represent the vector get from by taking with Finally, we take with and the problem of evaluating the Nash equilibrium point as:
In addition, we assume that both the tax and the fee for the production of the unit are increasing as the amount of productivity increases. It follows from [18,23], the function f could be taken in the following:
where and P, Q are matrices of order n so that is symmetric negative definite and Q is symmetric positive semidefinite with Lipschitz constants (for more details see, [23]). During this Example in Section 5.1, the matrices are generated randomly (Two matrices A, B are randomly generated with entries from The matrix and ). and entries of q randomly belongs to The feasible set is written as
The experimental results are shown in Figure 1, Figure 2, Figure 3 and Figure 4 and Table 1 with and
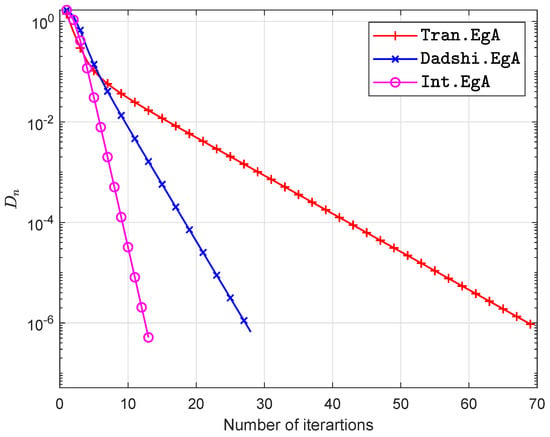
Figure 1.
Example in Section 5.1 when .
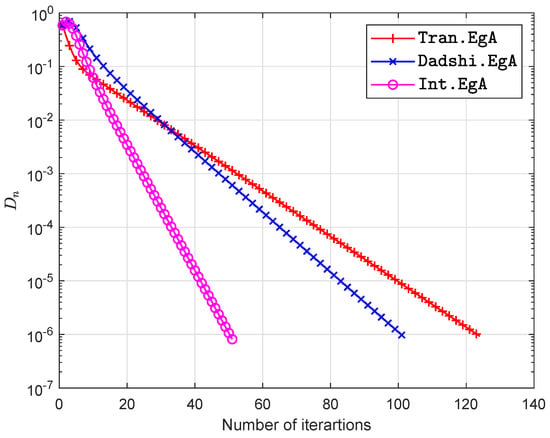
Figure 2.
Example in Section 5.1 when .
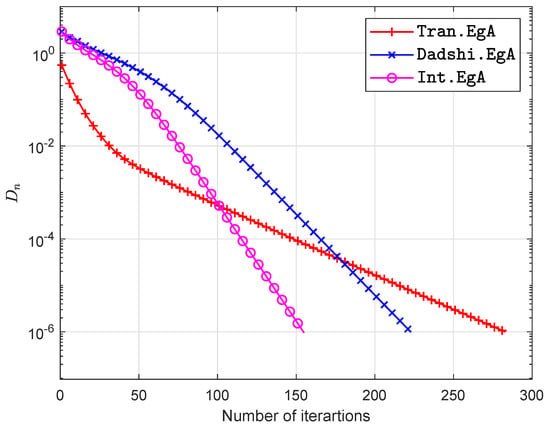
Figure 3.
Example in Section 5.1 when .
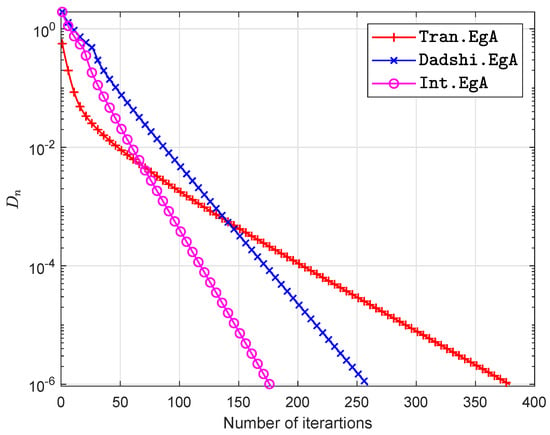
Figure 4.
Example in Section 5.1 when .

5.2. Example 2
Let take be explained by
and let It is east to see F is Lipschitz continuous with and pseudo-monotone. During these experiments we use stepsize for Tran et al. [23] and , and The experimental results are shown in Table 2 and Figure 5, Figure 6, Figure 7 and Figure 8.
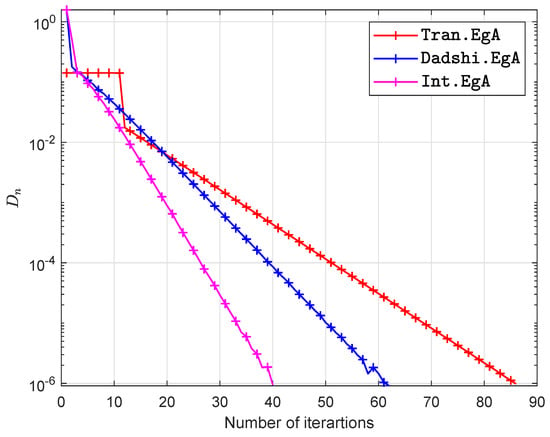
Figure 5.
Example in Section 5.2 when .
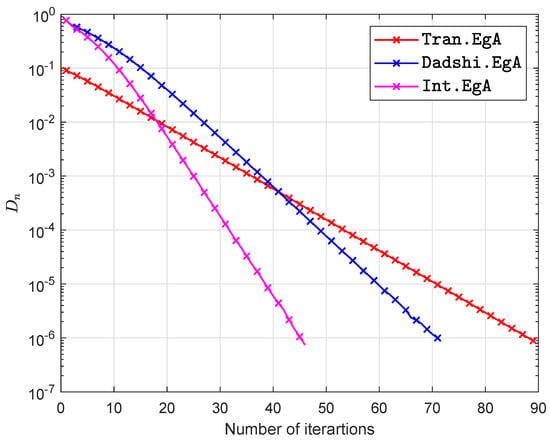
Figure 6.
Example in Section 5.2 when .
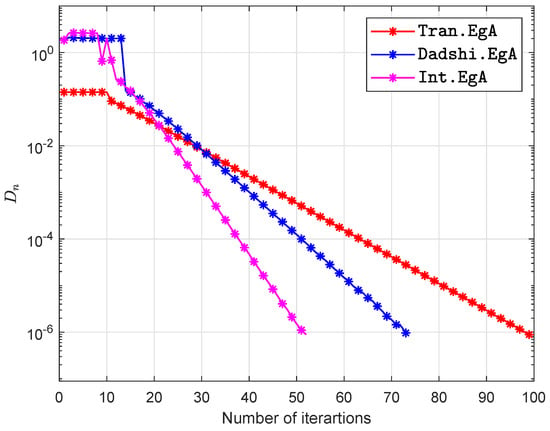
Figure 7.
Example in Section 5.2 when .
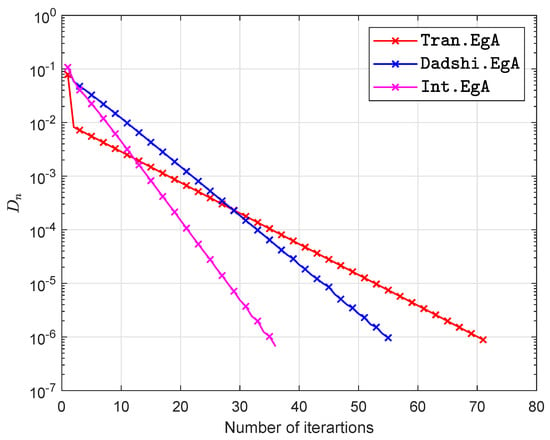
Figure 8.
Example in Section 5.2 when .
5.3. Example 3
Let a bifunction f define on the convex set K as
where B is an order n matrix, S is an order n skew-symmetric matrix, D is an order n diagonal matrix, having nonnegative entries. The feasible set defined as
while A is matrix and b is nonnegative vector. We can see that bifunction is monotone with Lipschitz-type constants are The numerical findings shall be noted in Figure 9, Figure 10 and Figure 11 and Table 3 with and
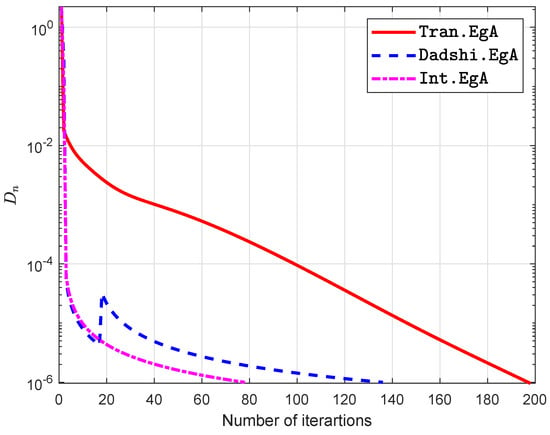
Figure 9.
Example in Section 5.3 when .
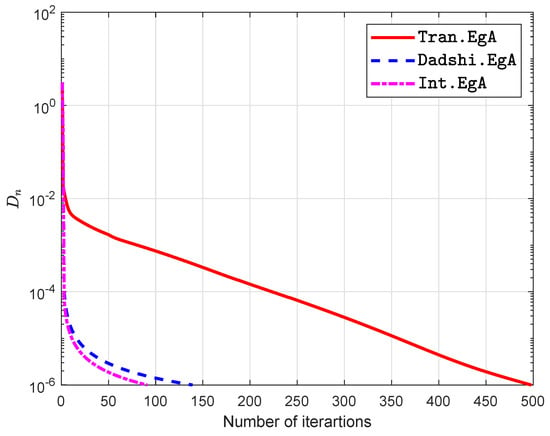
Figure 10.
Example in Section 5.3 when .
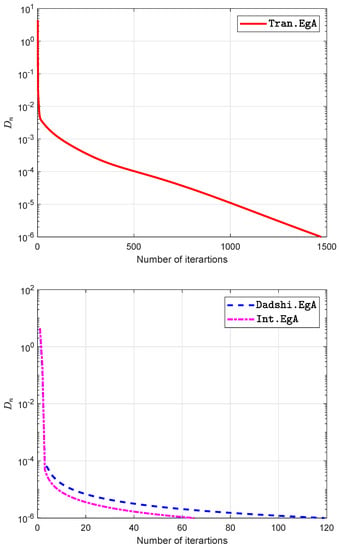
Figure 11.
Example in Section 5.3 when .
5.4. Example 4
Let be the real Hilbert space having elements are square-summable infinite sequence of real numbers and Let a bifunction where We can easily check that and also satisfy the assumption Next, we show that bifunction is Lipschitz-type continuous
while and value of Lipschitz-constants are Next, we prove that bifunction is pseudo-monotone. Let be so that mean that Thus
Next, we show that bifunction f is not monotone. Let we take and in a manner that
The projection onto K is explicitly computed as
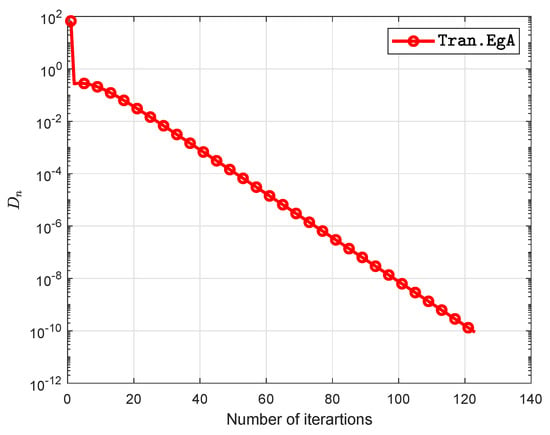
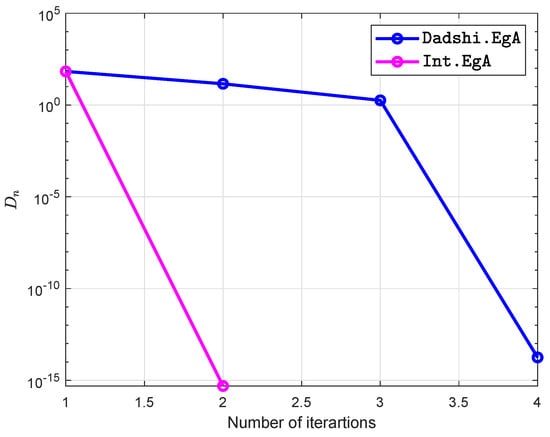
Figure 12.
Example in Section 5.4 when .
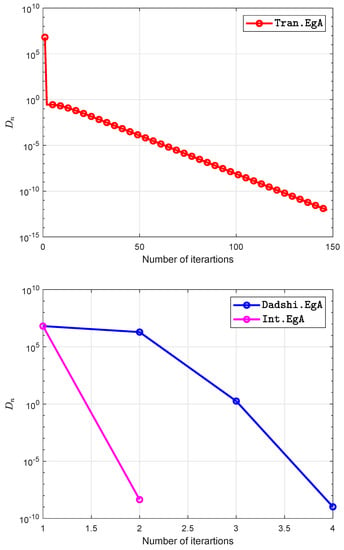
Figure 13.
Example in Section 5.4 when .
6. Conclusions
We have provided an extra-gradient-like method to resolve pseudo-monotone equilibrium problems in real Hilbert space. The key influence of our recommended method is that our generated iterative sequences have been integrated with the particular step-size evaluation formula. The stepsize formula is revised for each iteration based on the preceding iterations. Numerical conclusions were performed in order to explain our algorithm’s numerical performance contrasted with other methods. Such numerical reviews prove that inertial effects often normally promote the performance of the iterative sequence in this context.
Author Contributions
The authors contributed equally to writing this article. All authors have read and agree to the published version of the manuscript.
Funding
This research work was financially supported by King Mongkut’s University of Technology Thonburi through the ‘KMUTT 55th Anniversary Commemorative Fund’. Moreover, this project was supported by Theoretical and Computational Science (TaCS) Center under Computational and Applied Science for Smart research Innovation research Cluster (CLASSIC), Faculty of Science, KMUTT. In particular, Habib ur Rehman was financed by the Petchra Pra Jom Doctoral Scholarship Academic for Ph.D. Program at KMUTT [grant number 39/2560]. Furthermore, Wiyada Kumam was financially supported by the Rajamangala University of Technology Thanyaburi (RMUTTT) (Grant No. NSF62D0604).
Acknowledgments
The first author would like to thank the “Petchra Pra Jom Klao Ph.D. Research Scholarship from King Mongkut’s University of Technology Thonburi”. We are very grateful to editor and the anonymous referees for their valuable and useful comments, which helps in improving the quality of this work.
Conflicts of Interest
The authors declare that they have conflict of interest.
References
- Blum, E. From optimization and variational inequalities to equilibrium problems. Math. Stud. 1994, 63, 123–145. [Google Scholar]
- Facchinei, F.; Pang, J.S. Finite-Dimensional Variational Inequalities and Complementarity Problems; Springer Science & Business Media: New York, NY, USA, 2007. [Google Scholar]
- Konnov, I. Equilibrium Models and Variational Inequalities; Elsevier: New York, NY, USA, 2007; Volume 210. [Google Scholar]
- Giannessi, F.; Maugeri, A.; Pardalos, P.M. Equilibrium Problems: Nonsmooth Optimization and Variational Inequality Models; Springer Science & Business Media: New York, NY, USA, 2006; Volume 58. [Google Scholar]
- Fan, K. A Minimax Inequality and Applications, Inequalities III; Shisha, O., Ed.; Academic Press: New York, NY, USA, 1972. [Google Scholar]
- Muu, L.D.; Oettli, W. Convergence of an adaptive penalty scheme for finding constrained equilibria. Nonlinear Anal. Theory, Methods Appl. 1992, 18, 1159–1166. [Google Scholar] [CrossRef]
- Yuan, G.X.Z. KKM Theory and Applications in Nonlinear Analysis; CRC Press: New York, NY, USA, 1999; Volume 218. [Google Scholar]
- Brézis, H.; Nirenberg, L.; Stampacchia, G. A remark on Ky Fan’s minimax principle. Bollettino dell Unione Matematica Italiana 2008, 1, 257–264. [Google Scholar]
- Ansari, Q.; Wong, N.C.; Yao, J.C. The existence of nonlinear inequalities. Appl. Math. Lett. 1999, 12, 89–92. [Google Scholar] [CrossRef]
- Rehman, H.U.; Kumam, P.; Sompong, D. Existence of tripled fixed points and solution of functional integral equations through a measure of noncompactness. Carpathian J. Math. 2019, 35, 193–208. [Google Scholar]
- Rehman, H.U.; Gopal, G.; Kumam, P. Generalizations of Darbo’s fixed point theorem for new condensing operators with application to a functional integral equation. Demonstr. Math. 2019, 52, 166–182. [Google Scholar] [CrossRef]
- Antipin, A.S. The convergence of proximal methods to fixed points of extremal mappings and estimates of their rate of convergence. Comput. Math. Math. Phys. 1995, 35, 539–552. [Google Scholar]
- Combettes, P.L.; Hirstoaga, S.A. Equilibrium programming in Hilbert spaces. J. Nonlinear Convex Anal. 2005, 6, 117–136. [Google Scholar]
- Flåm, S.D.; Antipin, A.S. Equilibrium programming using proximal-like algorithms. Math. Program. 1996, 78, 29–41. [Google Scholar] [CrossRef]
- Van Hieu, D.; Muu, L.D.; Anh, P.K. Parallel hybrid extragradient methods for pseudomonotone equilibrium problems and nonexpansive mappings. Numer. Algorithms 2016, 73, 197–217. [Google Scholar] [CrossRef]
- Van Hieu, D.; Anh, P.K.; Muu, L.D. Modified hybrid projection methods for finding common solutions to variational inequality problems. Comput. Optim. Appl. 2017, 66, 75–96. [Google Scholar] [CrossRef]
- Van Hieu, D. Halpern subgradient extragradient method extended to equilibrium problems. Revista de la Real Academia de Ciencias Exactas Físicas y Naturales Ser. A Matemáticas 2017, 111, 823–840. [Google Scholar] [CrossRef]
- Hieua, D.V. Parallel extragradient-proximal methods for split equilibrium problems. Math. Model. Anal. 2016, 21, 478–501. [Google Scholar] [CrossRef]
- Konnov, I. Application of the proximal point method to nonmonotone equilibrium problems. J. Optim. Theory Appl. 2003, 119, 317–333. [Google Scholar] [CrossRef]
- Iusem, A.N.; Sosa, W. Iterative algorithms for equilibrium problems. Optimization 2003, 52, 301–316. [Google Scholar] [CrossRef]
- Quoc, T.D.; Anh, P.N.; Muu, L.D. Dual extragradient algorithms extended to equilibrium problems. J. Glob. Optim. 2012, 52, 139–159. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Cho, Y.J.; Yordsorn, P. Weak convergence of explicit extragradient algorithms for solving equilibirum problems. J. Inequalities Appl. 2019, 2019, 1–25. [Google Scholar] [CrossRef]
- Quoc Tran, D.; Le Dung, M.; Nguyen, V.H. Extragradient algorithms extended to equilibrium problems. Optimization 2008, 57, 749–776. [Google Scholar] [CrossRef]
- Santos, P.; Scheimberg, S. An inexact subgradient algorithm for equilibrium problems. Comput. Appl. Math. 2011, 30, 91–107. [Google Scholar]
- Takahashi, S.; Takahashi, W. Viscosity approximation methods for equilibrium problems and fixed point problems in Hilbert spaces. J. Math. Anal. Appl. 2007, 331, 506–515. [Google Scholar] [CrossRef]
- Rehman, H.U.; Kumam, P.; Abubakar, A.B.; Cho, Y.J. The extragradient algorithm with inertial effects extended to equilibrium problems. Comput. Appl. Math. 2020, 39, 1–26. [Google Scholar]
- Rehman, H.U.; Kumam, P.; Cho, Y.J.; Suleiman, Y.I.; Kumam, W. Modified Popov’s explicit iterative algorithms for solving pseudomonotone equilibrium problems. Optim. Methods. Softw. 2020, 0, 1–32. [Google Scholar]
- Moudafi, A. Proximal point algorithm extended to equilibrium problems. J. Nat. Geom. 1999, 15, 91–100. [Google Scholar]
- Mastroeni, G. On auxiliary principle for equilibrium problems. In Equilibrium Problems and Variational Models; Springer: Berlin, Germany, 2003; pp. 289–298. [Google Scholar]
- Martinet, B. Brève communication. Régularisation d’inéquations variationnelles par approximations successives. Revue Française D’informatique et De recherche Opérationnelle. Série Rouge 1970, 4, 154–158. [Google Scholar] [CrossRef]
- Rockafellar, R.T. Monotone operators and the proximal point algorithm. SIAM J. Control. Optim. 1976, 14, 877–898. [Google Scholar] [CrossRef]
- Cohen, G. Auxiliary problem principle and decomposition of optimization problems. J. Optim. Theory Appl. 1980, 32, 277–305. [Google Scholar] [CrossRef]
- Cohen, G. Auxiliary problem principle extended to variational inequalities. J. Optim. Theory Appl. 1988, 59, 325–333. [Google Scholar] [CrossRef]
- Polyak, B.T. Some methods of speeding up the convergence of iteration methods. USSR Comput. Math. Math. Phys. 1964, 4, 1–17. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]
- Moudafi, A. Second-order differential proximal methods for equilibrium problems. J. Inequalities Pure Appl. Math. 2003, 4, 1–7. [Google Scholar]
- Dong, Q.L.; Lu, Y.Y.; Yang, J. The extragradient algorithm with inertial effects for solving the variational inequality. Optimization 2016, 65, 2217–2226. [Google Scholar] [CrossRef]
- Thong, D.V.; Van Hieu, D. Modified subgradient extragradient method for variational inequality problems. Numer. Algorithms 2018, 79, 597–610. [Google Scholar] [CrossRef]
- Dong, Q.; Cho, Y.; Zhong, L.; Rassias, T.M. Inertial projection and contraction algorithms for variational inequalities. J. Glob. Optim. 2018, 70, 687–704. [Google Scholar] [CrossRef]
- Yang, J. Self-adaptive inertial subgradient extragradient algorithm for solving pseudomonotone variational inequalities. Appl. Anal. 2019. [Google Scholar] [CrossRef]
- Thong, D.V.; Van Hieu, D.; Rassias, T.M. Self adaptive inertial subgradient extragradient algorithms for solving pseudomonotone variational inequality problems. Optim. Lett. 2020, 14, 115–144. [Google Scholar] [CrossRef]
- Dadashi, V.; Iyiola, O.S.; Shehu, Y. The subgradient extragradient method for pseudomonotone equilibrium problems. Optimization 2019, 1–23. [Google Scholar] [CrossRef]
- Censor, Y.; Gibali, A.; Reich, S. The subgradient extragradient method for solving variational inequalities in Hilbert space. J. Optim. Theory Appl. 2011, 148, 318–335. [Google Scholar] [CrossRef]
- Bianchi, M.; Schaible, S. Generalized monotone bifunctions and equilibrium problems. J. Optim. Theory Appl. 1996, 90, 31–43. [Google Scholar] [CrossRef]
- Bushell, P.J. UNIFORM CONVEXITY, HYPERBOLIC GEOMETRY, AND NONEXPANSIVE MAPPINGS (Pure and Applied Mathematics: A Series of Monographs & Textbooks, 83) By K. Goebel and S. Reich: pp. 192. SFr.96.-. (Marcel Dekker Inc, U.S.A., 1984). Bull. Lond. Math. Soc. 1985, 17, 293–294. [Google Scholar] [CrossRef]
- Kreyszig, E. Introductory Functional Analysis with Applications, 1st ed.; Wiley: New York, NY, USA, 1978. [Google Scholar]
- Tiel, J.v. Convex Analysis; John Wiley: New York, NY, USA, 1984. [Google Scholar]
- Bauschke, H.H.; Combettes, P.L. Convex Analysis and Monotone Operator Theory in Hilbert Spaces; Springer: Berlin, Germany, 2011; Volume 408. [Google Scholar]
- Alvarez, F.; Attouch, H. An inertial proximal method for maximal monotone operators via discretization of a nonlinear oscillator with damping. Set-Valued Anal. 2001, 9, 3–11. [Google Scholar] [CrossRef]
- Opial, Z. Weak convergence of the sequence of successive approximations for nonexpansive mappings. Bull. Am. Math. Soc. 1967, 73, 591–597. [Google Scholar] [CrossRef]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).