Abstract
In this paper, we establish exact solutions for the non-linear coupled KdV equations. The exp-function method is used to construct the solitary travelling wave solutions for these equations. The numerical adaptive moving mesh PDEs (MMPDEs) method is also implemented in order to solve the proposed coupled KdV equations. The achieved results may be applicable to some plasma environments, such as ionosphere plasma. Some numerical simulations compared with the exact solutions are provided to illustrate the validity of the proposed methods. Furthermore, the modulational instability is analyzed based on the standard linear-stability analysis. The depiction of the techniques are straight, powerful, robust and can be applied to other nonlinear systems of partial differential equations.
Keywords:
coupled KdV equations; moving mesh PDEs (MMPDEs); exp(-Γ(ξ))-expansion method; exact solutions; monitor function MSC:
35A20, 35A99, 83C15, 65L12, 65N06, 65N40, 65N45, 65N50, 35Q51
1. Introduction
The nonlinear partial differential equations (NPDEs) are widely used to express a variety of physical circumstances in fields such as biology, economy, engineering, elastic media, meteorology, plasma physics, optics, fluid mechanics and chemical physics, see [1,2,3,4,5,6,7,8,9,10,11,12]. In the last three decades, most researchers have proposed and developed some analytical and numerical methods to find exact and numerical solutions for NPDEs, such as F-expansion method [13], expansion method [14], homogeneous balance method [15], Jacobi elliptic function method [16], exp-function method [17], sine-cosine method [18], tanh-sech method [19], Lie symmetry analysis [20], RB sub-ODE method [21,22], adaptive moving mesh method [23,24]. Indeed, there are recent developments of symmetry methods to obtain special reduced solutions of NPDEs [25].
The study of non-linear complex waves is very important in various applied sciences, especially in optics, biology, fluid mechanics, engineering, physics, higher-order symmetries, and solid state physics and chemical physics. The Kortweg-de Vries (KdV) equations have been part of an important class of non-linear evolution equations with numerous applications in physics, plasma and engineering fields. All these applications start from a more or less general physical model and end up in the KdV equation by considering a specific limit of the physical problem. In the theory of rogue waves, the nonlinear Schrödinger equation plays a dominant role for waves in deep water, while the KdV equation describes the effects in shallow water. In plasma physics, the KdV equations produce ion-acoustic solutions [26]. Several well-know researchers obtain symmetries because they can be used to obtain systematically exact solutions of the KdV equations [27,28].
This article is concerned with the following coupled KdV equations [29]:
subject to
where and are nonzero parameters, and are functions of System (1) was derived by Hirota and Satsuma [29] to describe iterations of water waves with different dispersion relations. Recently, many authors mainly had paid attention to study solutions of coupled equations by using various methods. Among these are the trigonometric function transform method [30], F-expansion method [13], the homotopy perturbation [31] and differential transformation Method [32]. For further methods used to solve system (1), see [33,34] and references therein.
The novelties and the significance of the results in this article are mainly exhibited in three aspects. First, we achieve some new solutions for the coupled KdV Equation (1), utilizing the exp-function method [17,35]. Second, we implement the adaptive moving mesh PDEs (MMPDEs) scheme to solve the coupled KdV Equation (1). We compare these numerical solutions with the exact solutions obtained by the exp-function method. To the best of our knowledge, the proposed methods have not been used to solve Equation (1). Third, the modulation instability is employed in order to study the stability of exact solutions.
2. Summary of the -Expansion Method
We give a brief explanation for the -expansion approach [17,35]. This technique is described in the following steps: Assume that
where is an unknown function and T is a polynomial of is a PDE with two independent variables x and t. In order to reduce Equation (3) to an ordinary differential equation (ODE), we introduce the transformation
where w is a constant. Expanding the derivatives in Equation (3) using the chain rule leads to the ODE
where R is a polynomial in and
According to this technique, the solution of Equation (5) is given in the form:
where the constants will be estimated later. Furthermore, and satisfies the equation
We now turn to present various cases for the solutions of Equation (8).
- If then
- If then
- If then
- If then
Stability Analysis
We examine the stability of the achieved traveling wave solutions by using the Hamiltonian system form [36,37], which is
where w is the wave speed, indicates the momentum and and are the obtained traveling wave solutions of the system (1). A sufficient condition for stability is given by
Hence, if conditions (12) and (13) are met, then it is stable on unbounded domains. If conditions (12) and (13) are not satisfied, then it is unstable. The criteria for the stability of traveling wave solutions are discussed here for the system (1) at particular intervals. For more details about the stability of the exact solutions, we refer to [37,38,39] and references therein.
3. The Exact Solution of the Coupled KdV Equations
Consider that the traveling wave solutions of Equation (1) are given by
to alter system (1) into the ODEs
Integrating Equation (15) concerning once and neglecting the constant of integration, we have
Balancing the order of with the exponent of from the first equation of the system (16), gives and the order of with the exponent of from the second equation of the system (16), gives . Hence, the solutions take the form of
And then
where the values of the constants and are computed later. Substituting Equation (18) into Equation (16) and solving the obtained algebraic system after equating the coefficients of , to zero, yields
- Case I
- Case II
Putting and so that gives
- From Case I, the exact solutions are given by
- From Case II
Figure 1a,b present the traveling wave solutions Equation (21) with the parameters given by and in the interval Figure 2a,b show the traveling wave solutions Equation (22) depicted under the parameters and in the interval All of the results are displayed at The sufficient conditions of stability (Equations (12) and (13)) are applied, and then we find that all of the obtained solutions are stable in the interval
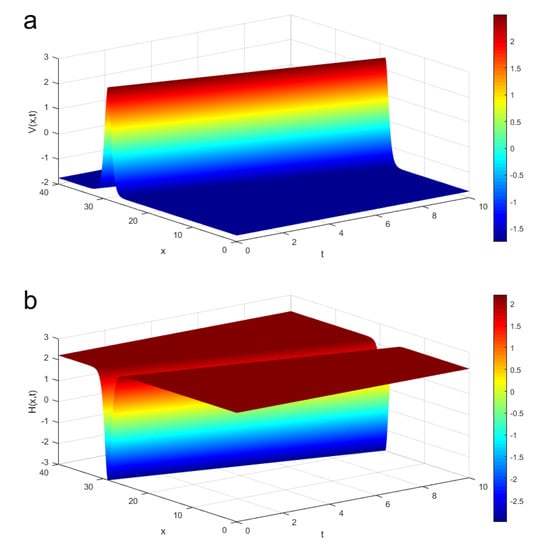
Figure 1.
(a,b) depict the solutions (21) with and
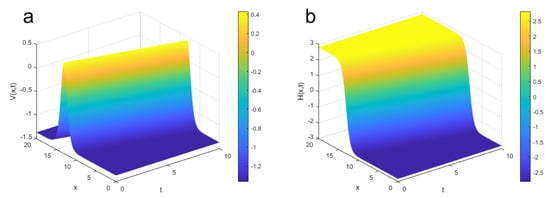
Figure 2.
(a,b) depict the solutions (22) with and
The boundary conditions are initially generated from studying the obtained travelling wave solutions at the endpoints. Figure 1a illustrates that the traveling wave solution goes to at the endpoints of the physical domain and Figure 1b shows that goes to at the endpoints. While Figure 2a illustrates that the traveling wave solution goes to at the endpoints of the physical domain and Figure 2b shows that goes to at the endpoints. Hence, we can conclude that
4. Numerical Results
The MMPDEs technique [40] is implemented to extract the numerical solutions of the considered equations. This method can be used to deal with one-dimensional and multi-dimensional PDEs as shown in [40,41,42], respectively. The solutions of the coupled KdV equations are approximated by employing new meshes named gradient flow equations. The main idea of utilizing this approach is to generate new meshes and diminish the error in the solutions by feeding the regions with a high error with more points. The coupled KdV Equation (1) can be simply rewritten by
subject to the given boundary values in Equation (23). The corresponding initial data is given by
The used coordinate transform is expressed as where and denote the space and computational coordinates, respectively. We use the chain rule to descritise the spatial and temporal derivatives as follows:
To generate the mesh we use the one dimensional equation [43,44,45]
is utilized with the following boundary conditions
where L is half of the length of the physical domain and is the monitor function. The initial data that we use is taken
The relaxation parameter is presented by and is the smoothing operator described by Ceniceros and Hou [46]. The fundamental purpose of is to control the movement of the mesh. A suitable choice for the function leads to perfect and acceptable results [43,44,45]. A modified monitor function was developed in [47] as follows:
where is a positive constant. The semi-discretisation of the spatial derivative converts the coupled KdV equations into ODEs easily solved using line methods. The obtained system is numerically integrated using the MATLAB ODE solver (ode15i). The physical domain is firstly separated as follows:
The computational coordinates are illustrated by
We now fix the boundary mesh by and The interior mesh is completely approximated by resolving Equation (29) with the boundary conditions The discretisation of Equation (28) is simply developed by applying the central finite differences. That is
where
Figure 3 compares the movement of one travelling wave solution for both the exact solution of (left) and the numerical solution of (right) as the time increases from In Figure 4, we illustrate the movement of the analytic solution of (left) compared with the movement of the numerical solution of (right) for The used parameters are given by and The results appear to have approximately the same behaviour. This indicates that the used methods are reliable and can be utilized to solve more nonlinear PDEs. The conditions of the stability are employed and we discover that our results are stable inside the interval
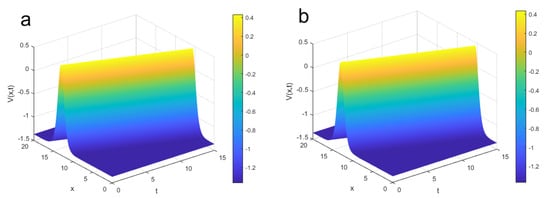
Figure 3.
Time evolution () for the exact solution of is shown in (a) and the numerical solution of is illustrated in (b). The parameter values are and
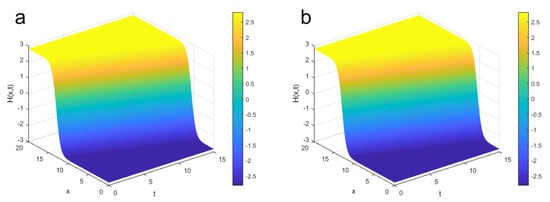
Figure 4.
Time evolution () for the exact solution of is presented in (a) and the numerical solution of is depicted in (b). The parameter values are and
5. Comparison
The MMPDEs method utterly confirms its validity to be used in dealing with most NLPDEs. In particular, the method gives excellent results for the coupled KdV equations. More specifically, Figure 3 and Figure 4 illustrate a close similarity between the obtained exact and numerical solutions. Figure 5 illustrate that the solution moves as the time increases and seems to be without variations. A satisfactory performance of this approach can be also seen in Figure 6a,b where the numerical solutions mostly agree with the exact ones. This method distributes the points adequately. Therefore, the error is often very small. As a result, this technique can be used to solve several other NLPDEs.
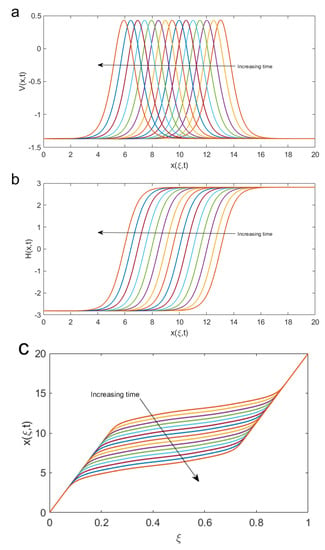
Figure 5.
(a,b) depict the time development for one wave solution for and respectively, at (c) presents the movement of the mesh
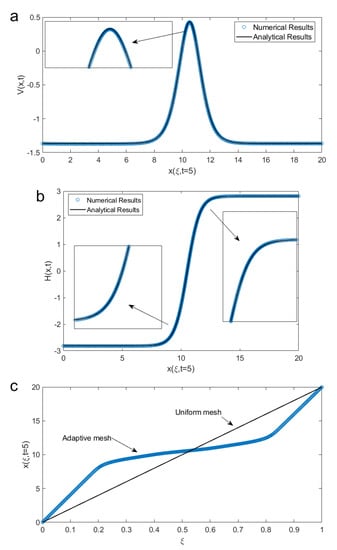
Figure 6.
The movement of the exact and numerical solutions for and is plotted in (a) and (b), respectively, over the domain (c) exhibits the behaviour of the adaptive and uniform mesh.
6. Conclusions
In this work, we applied two methods to solve the coupled KdV equations, specifically, the analytical exp-function method and numerical MMPDEs method. We introduced some 2D and 3D plots for some of the obtained solutions. The obtained solutions are stable on the interval [0,20]. The achieved solutions may be applicable for explaining important phenomena in science, namely, in plasma physics and crystal lattices. We are quit sure that these techniques can also be applied to other NPDEs and, therefore, we shall take it up in our future studies.
Now, we summarize the article as follows.
- Constructing some new solutions for coupled KdV equations, using the exp-function method.
- Studying the modulation instability to check the stability of the exact solutions.
- Implementing (numerically) the MMPDEs scheme to solve coupled KdV equations.
- Currently, work is in progress on the application of the proposed two schemes for further coupled systems of NPDEs.
Author Contributions
All authors made an equal contribution to the preparing the manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
The authors received no direct funding for this work.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Abdelrahman, M.A.E.; Kunik, M. The ultra-relativistic Euler equations. Math. Meth. Appl. Sci. 2015, 38, 1247–1264. [Google Scholar] [CrossRef]
- Abdelrahman, M.A.E. On the shallow water equations. Z. Naturforsch. 2017, 72, 873–879. [Google Scholar] [CrossRef]
- Abdelrahman, M.A.E.; Sohaly, M.A. The development of the deterministic nonlinear PDEs in particle physics to stochastic case. Results Phys. 2018, 9, 344–350. [Google Scholar] [CrossRef]
- Abdelrahman, M.A.E.; Sohaly, M.A.; Alharbi, A.R. The new exact solutions for the deterministic and stochastic (2+1)-dimensional equations in natural sciences. J. Taibah. Univ. Sci. 2019, 13. [Google Scholar] [CrossRef]
- Abdelrahman, M.A.E.; Hassan, S.Z.; Inc, M. The coupled nonlinear Schrödinger-type equations. Mod. Phys. Lett. B 2020, 2050078. [Google Scholar] [CrossRef]
- Yaslan, H.C.; Girgin, E. New exact solutions for the conformable space-time fractional KdV, CDG, (2+1)-dimensional CBS and (2+1)-dimensional AKNS equations. J. Taibah Sci. 2019, 13, 1–8. [Google Scholar] [CrossRef]
- Wazwaz, A.M.; Kaur, L. Optical solitons for nonlinear Schrödinger equation in the normal dispersive regimes. Optik 2019, 184, 428–435. [Google Scholar] [CrossRef]
- Alharbi, A.R.; Almatrafi, M.B. Riccati-Bernoulli sub-ODE approach on the partial differential equations and applications. Int. J. Math. Comput. Sci. 2020, 15, 367–388. [Google Scholar]
- Hassan, S.Z.; Abdelrahman, M.A.E. Solitary wave solutions for some nonlinear time fractional partial differential equations. Pramana-J. Phys. 2018, 91, 67. [Google Scholar] [CrossRef]
- Abdelrahman, M.A.E.; Sohaly, M.A. On the new wave solutions to the MCH equation. Indian J. Phys. 2018, 93, 903–911. [Google Scholar] [CrossRef]
- Cattani, C.; Ciancio, A. Hybrid two scales mathematical tools for active particles modeling complex systems with learning hiding dynamics. Math. Mod. Meth. Appl. Sci. 2007, 17, 171–188. [Google Scholar] [CrossRef]
- Zhang, Y.; Cattani, Y.C.; Yang, X.J. Local fractional homotopy perturbation method for solving nonhomogeneous heat conduction equations in fractal domains. Entropy 2015, 17, 6753–6764. [Google Scholar] [CrossRef]
- Zhang, J.L.; Wang, M.L.; Wang, Y.M.; Fang, Z.D. The improved F-expansion method and its applications. Phys. Lett. A 2006, 350, 103–109. [Google Scholar] [CrossRef]
- Zhang, S.; Tong, J.L.; Wang, W. A generalized -expansion method for the mKdv equation with variable coefficients. Phys. Lett. A 2008, 372, 2254–2257. [Google Scholar] [CrossRef]
- Fan, E.; Zhang, H. A note on the homogeneous balance method. Phys. Lett. A 1998, 246, 403–406. [Google Scholar] [CrossRef]
- Dai, C.Q.; Zhang, J.F. Jacobian elliptic function method for nonlinear differential difference equations. Chaos Solut. Fractals 2006, 27, 1042–1049. [Google Scholar] [CrossRef]
- Aminikhad, H.; Moosaei, H.; Hajipour, M. Exact solutions for nonlinear partial differential equations via Exp-function method. Numer. Methods Partial. Differ. Equations 2009, 26, 1427–1433. [Google Scholar]
- Wazwaz, A.M. Exact solutions to the double sinh-Gordon equation by the tanh method and a variable separated ODE method. Comput. Math. Appl. 2005, 50, 1685–1696. [Google Scholar] [CrossRef]
- Wazwaz, A.M. The tanh method for travelling wave solutions of nonlinear equations. Appl. Math. Comput. 2004, 154, 714–723. [Google Scholar]
- Hydon, P.E. Symmetry Methods for Differential Equations; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Yang, X.F.; Deng, Z.C.; Wei, Y. A Riccati-Bernoulli sub-ODE method for nonlinear partial differential equations and its application. Adv. Diff. Equ. 2015, 1, 117–133. [Google Scholar] [CrossRef]
- Abdelrahman, M.A.E.; Sohaly, M.A. Solitary waves for the nonlinear Schrödinger problem with the probability distribution function in stochastic input case. Eur. Phys. J. Plus 2017, 132, 339. [Google Scholar] [CrossRef]
- Huang, W.; Russell, R.D. The Adaptive Moving Mesh Methods; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Budd, C.J.; Huang, W.; Russell, R.D. Adaptivity with moving grids. Acta Numer. 2009, 18, 111–241. [Google Scholar] [CrossRef]
- Bluman, G.W.; Cheviakov, A.F.; Anco, S.C. Applications of Symmetry Methods to Partial Differential Equations; Springer: New York, NY, USA, 2010. [Google Scholar]
- Gao, Y.T.; Tian, B. Ion-acoustic shocks in space and laboratory dusty plasmas: Two-dimensional and non-traveling-wave observable effects. Phys. Plasmas 2001, 8, 3146. [Google Scholar] [CrossRef]
- Lou, S.Y. Symmetries of the KdV equation and four hierarchies of the integro-differential KdV equations. J. Math. Phys. 1994, 35, 2390–2396. [Google Scholar] [CrossRef]
- Wang, G.; Xu, T. Symmetry properties and explicit solutions of the nonlinear time fractional KDV equation. Bound. Value Probl. 2013, 1, 1–13. [Google Scholar] [CrossRef]
- Hirota, R.; Satsuma, J. Soliton solutions of a coupled Korteweg-de Vries equation. Phys. Lett. A 1981, 85, 407–408. [Google Scholar] [CrossRef]
- Caom, D.B.; Yan, J.R.; Zang, Y. Exact solutions for a new coupled MKdV equations and a coupled KdV equations. Phys. Lett. A 2002, 297, 68–74. [Google Scholar]
- Ganji, D.D.; Rafei, M. Solitary wave solutions for a generalized Hirota-Satsuma coupled KdV equation by homotopy perturbation method. Phys. Lett. A 2006, 356, 131–137. [Google Scholar] [CrossRef]
- Gokdogan, A.; Yildirim, A.; Merdan, M. Solving coupled KdV equations by differential transformation method. World Appl. Sci. J. 2012, 19, 1823–1828. [Google Scholar]
- Assas, L.M.B. Variational iteration method for solving coupled KdV equations. Chaos Solitons Fractals 2008, 38, 1225–1228. [Google Scholar] [CrossRef]
- Jaradat, H.M.; Syam, M.; Alquran, M. A two-mode coupled Korteweg–de Vries: multiple-soliton solutions and other exact solutions. Nonlinear Dyn. 2017, 90, 371–377. [Google Scholar] [CrossRef]
- Hassan, S.H.; Alyamani, N.A.; Abdelrahman, M.A.E. A construction of new traveling wave solutions for the 2D Ginzburg-Landau equation. Eur. Phys. J. Plus 2019, 134, 425. [Google Scholar] [CrossRef]
- Chandrasekhar, S. Hydrodynamic and Hydromagnetic Stability; Dover Publications Inc.: New York, NY, USA, 1981. [Google Scholar]
- Sandstede, B. Chapter 18—Stability of Travelling Waves. In Handbook of Dynamical Systems; Fiedler, Ed.; Elsevier: Amsterdam, The Netherlands, 2002; Volume 2, pp. 983–1055. [Google Scholar]
- Jafari, H.; Soltani, R.; Khalique, C.M.; Baleanu, D. Exact solutions of two nonlinear partial differential equations by using the first integral method. Bound. Value Probl. 2013, 2013, 117. [Google Scholar] [CrossRef]
- Alharbi, A.R.; Almatrafi, M.B.; Abdelrahman, M.A.E. Analytical and numerical investigation for Kadomtsev-Petviashvili equation arising in plasma physics. Phys. Scr. 2020, 95, 4. [Google Scholar] [CrossRef]
- Russell, R.D.; Huang, W.; Ren, Y. Moving mesh partial differential equations (MMPDES) based on the equidistribution principle. Siam. J. Numer. Anal. 1994, 31, 709–730. [Google Scholar]
- Huang, W.; Russell, R.D. A high dimensional moving mesh strategy. Appl. Numer. Math. 1997, 26, 63–76. [Google Scholar] [CrossRef]
- Budd, C.J.; Williams, J.F. Moving mesh generation using the parabolic Monge-Ampere equation. SIAM J. Sci. Comput. 2009, 31, 3438–3465. [Google Scholar] [CrossRef]
- Alharbi, A.R.; Naire, S. An adaptive moving mesh method for thin film flow equations with surface tension. J. Comput. Appl. Math. 2017, 319, 365–384. [Google Scholar] [CrossRef]
- Alharbi, A.R.; Naire, S. An adaptive moving mesh method for two-dimensional thin film flow equations with surface tension. J. Comput. Appl. Math. 2019, 356, 219–230. [Google Scholar] [CrossRef]
- Alharbi, A.R. Numerical Solution of Thin-Film Flow Equations Using Adaptive Moving MESH methods. Ph.D. Thesis, Keele University, Keele, UK, 2016. [Google Scholar]
- Ceniceros, H.D.; Hou, T.Y. An efficient dynamically adaptive mesh for potentially singular solutions. J. Comput. Phys. 2001, 172, 609–639. [Google Scholar] [CrossRef]
- Cook, S.P. Adaptive Mesh Methods for Numerical Weather Prediction. Ph.D. Thesis, University of Bath, Bath, UK, 2016. [Google Scholar]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).