Convergence and Dynamics of a Higher-Order Method

 ,
,  ,
,  ,
,  and
and 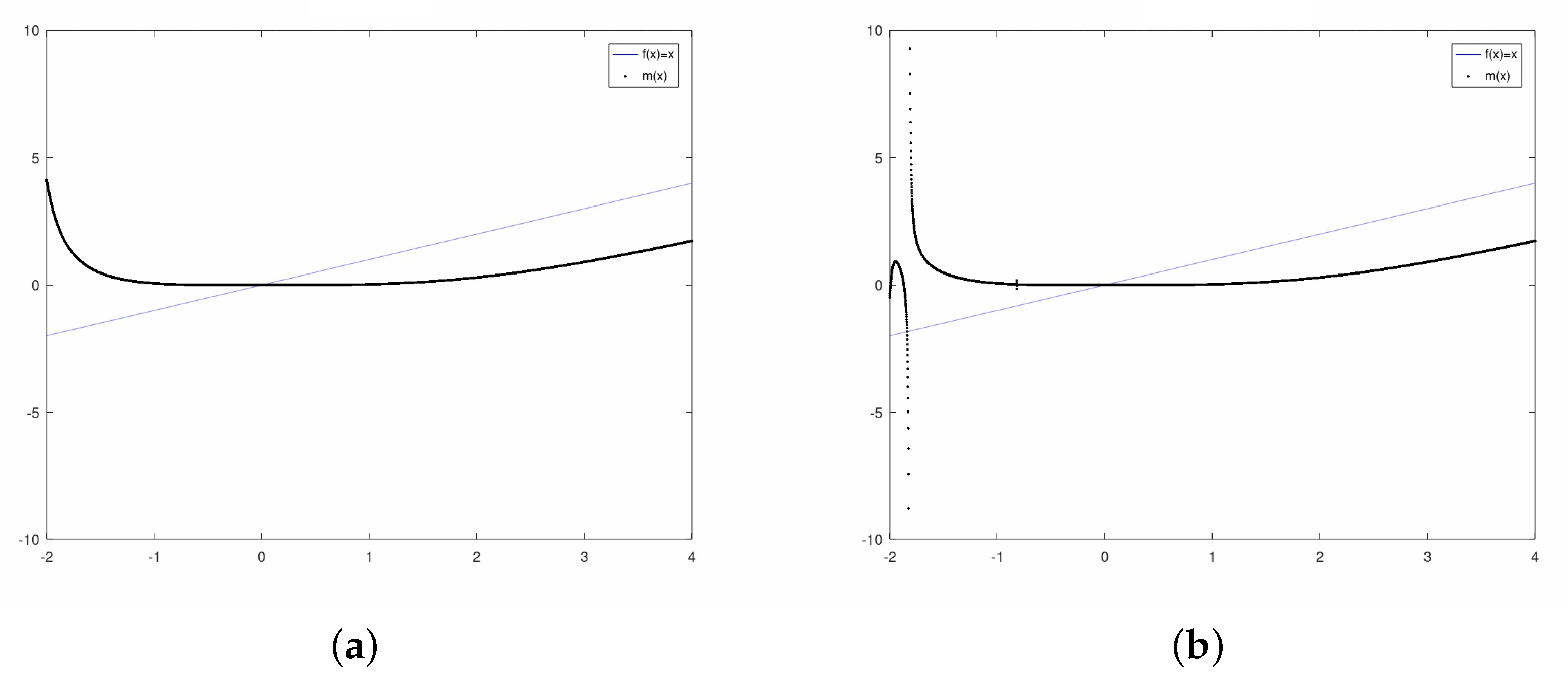{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Local Convergence Analysis
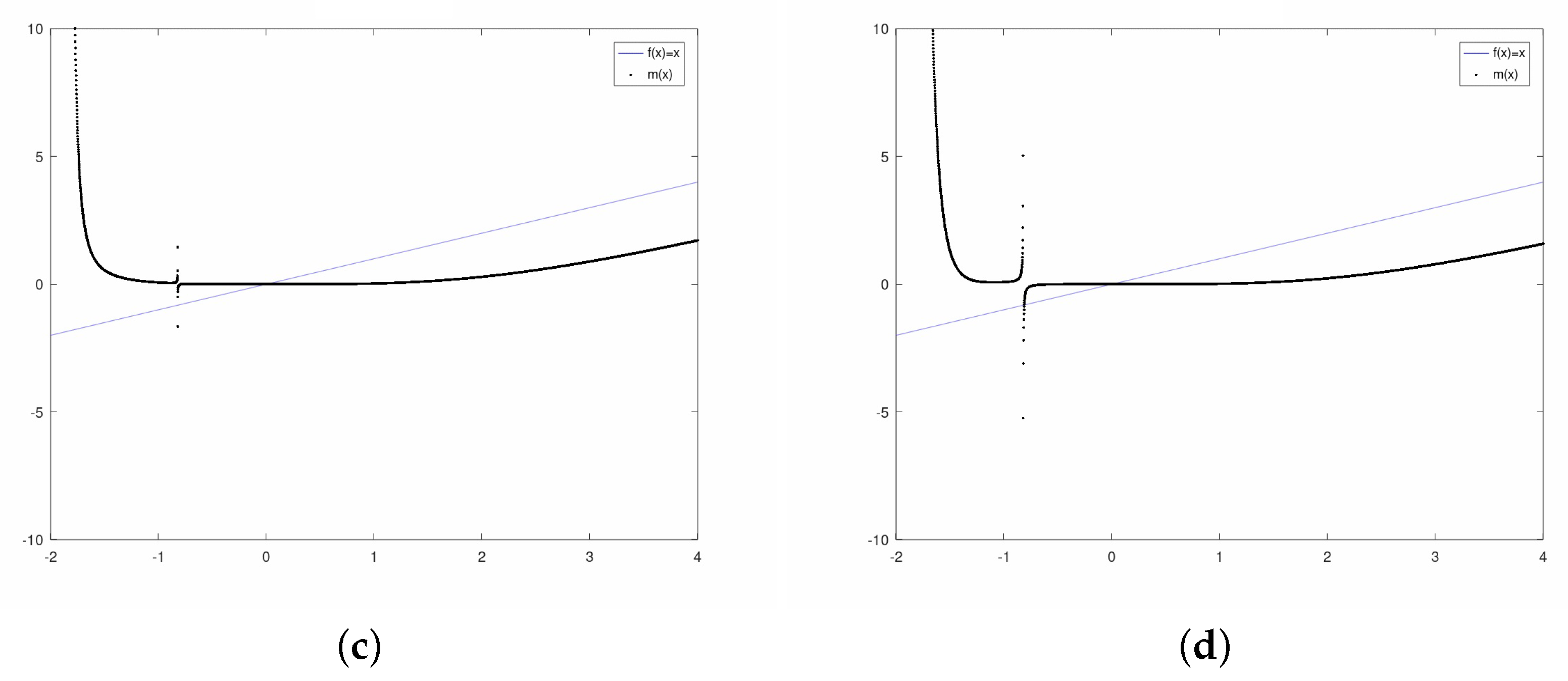
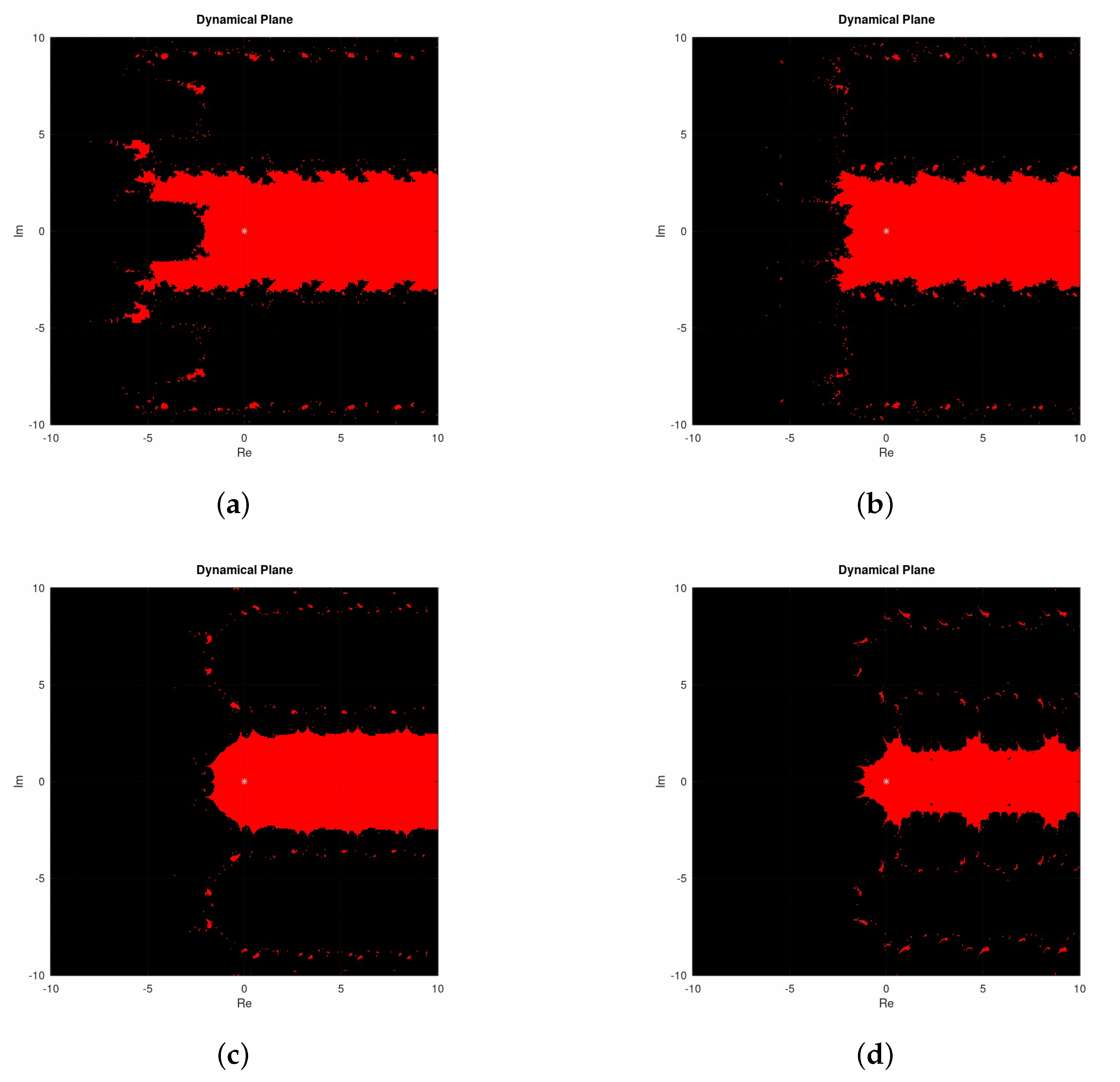
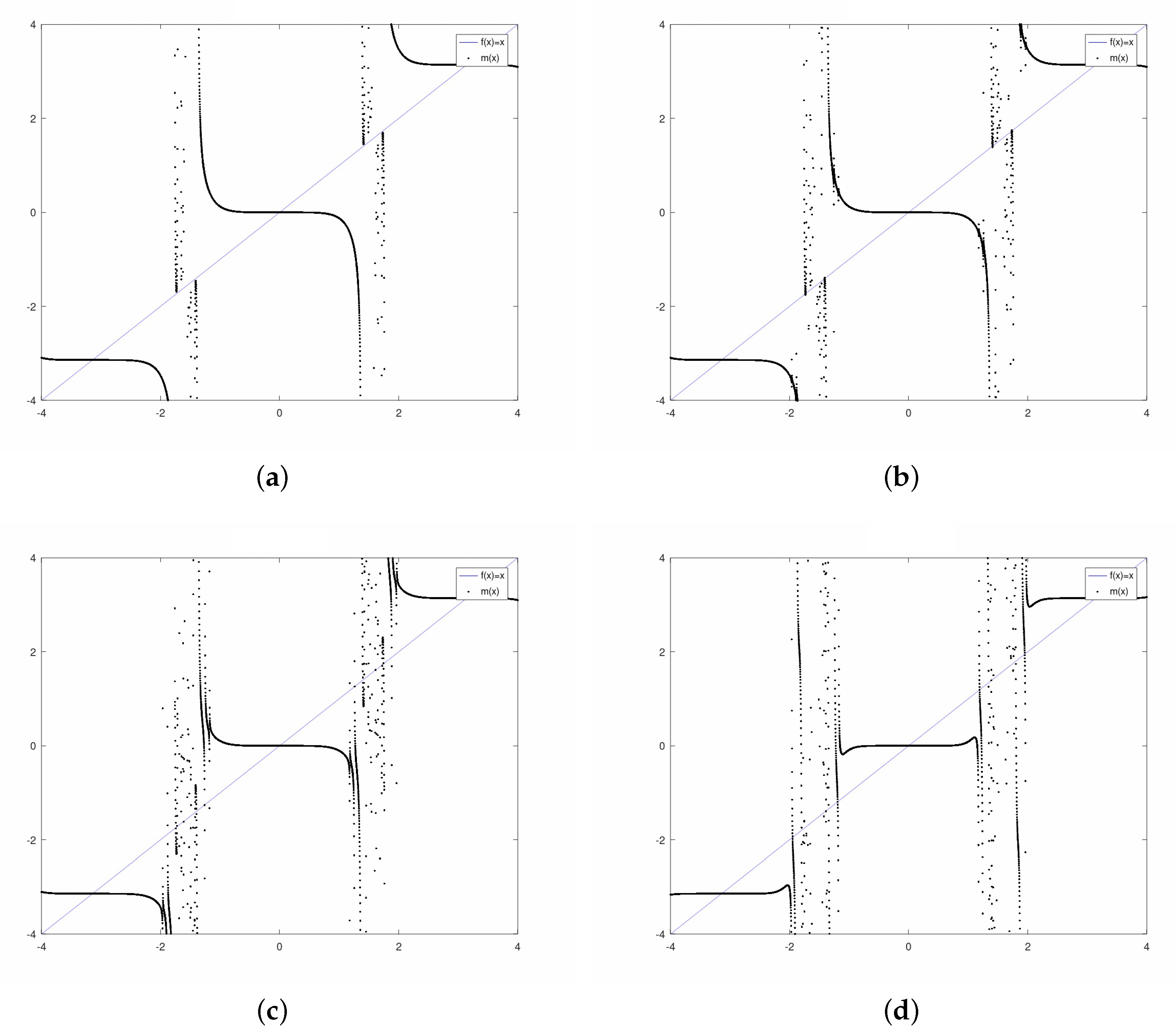
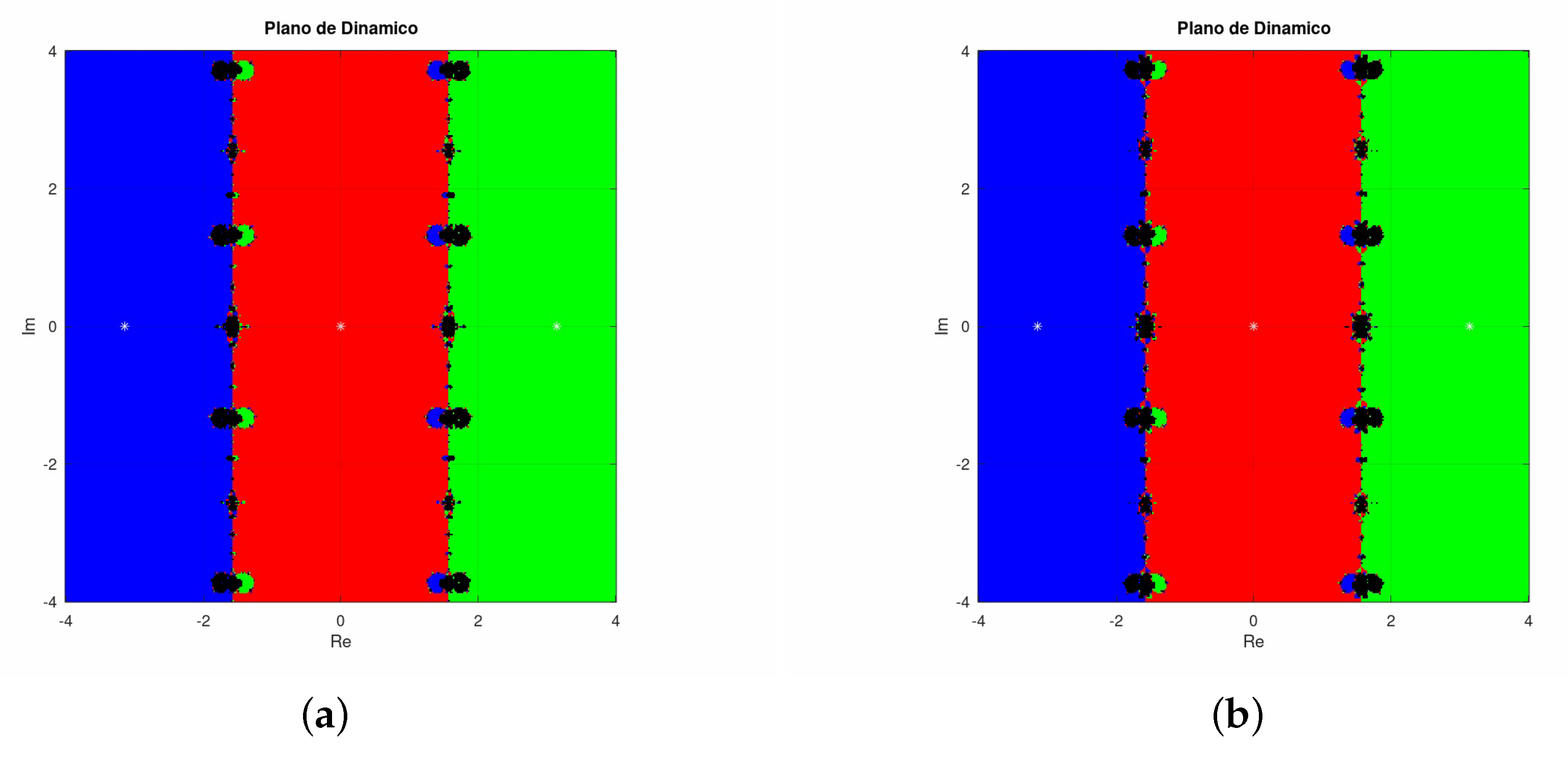
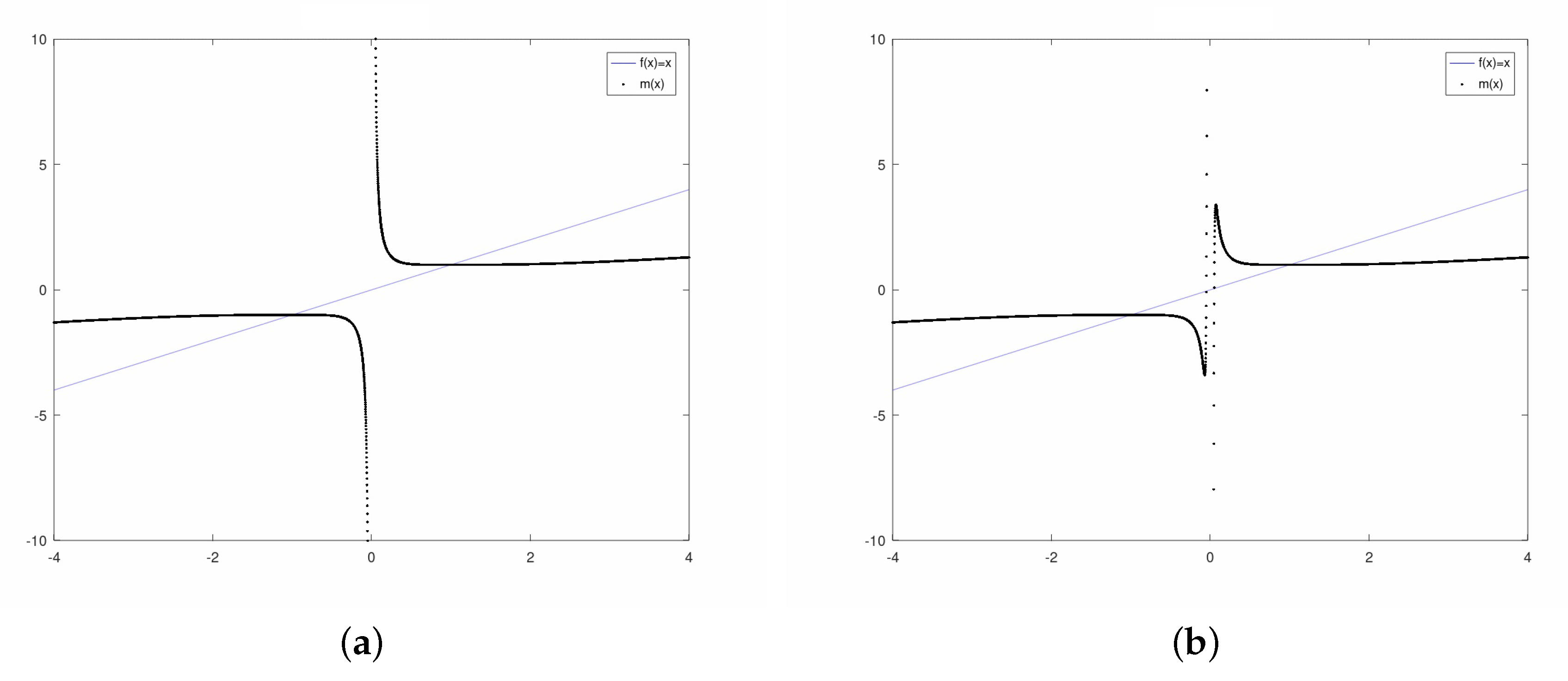
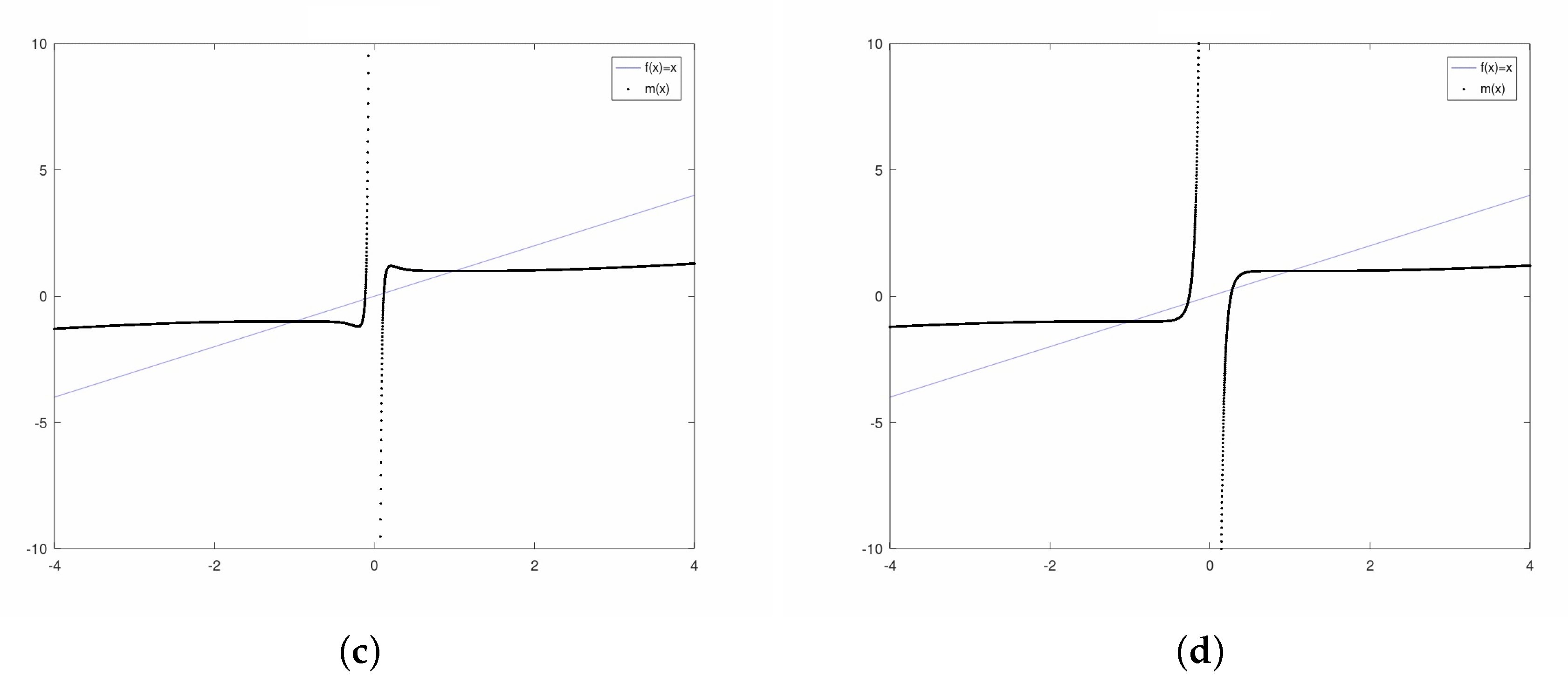
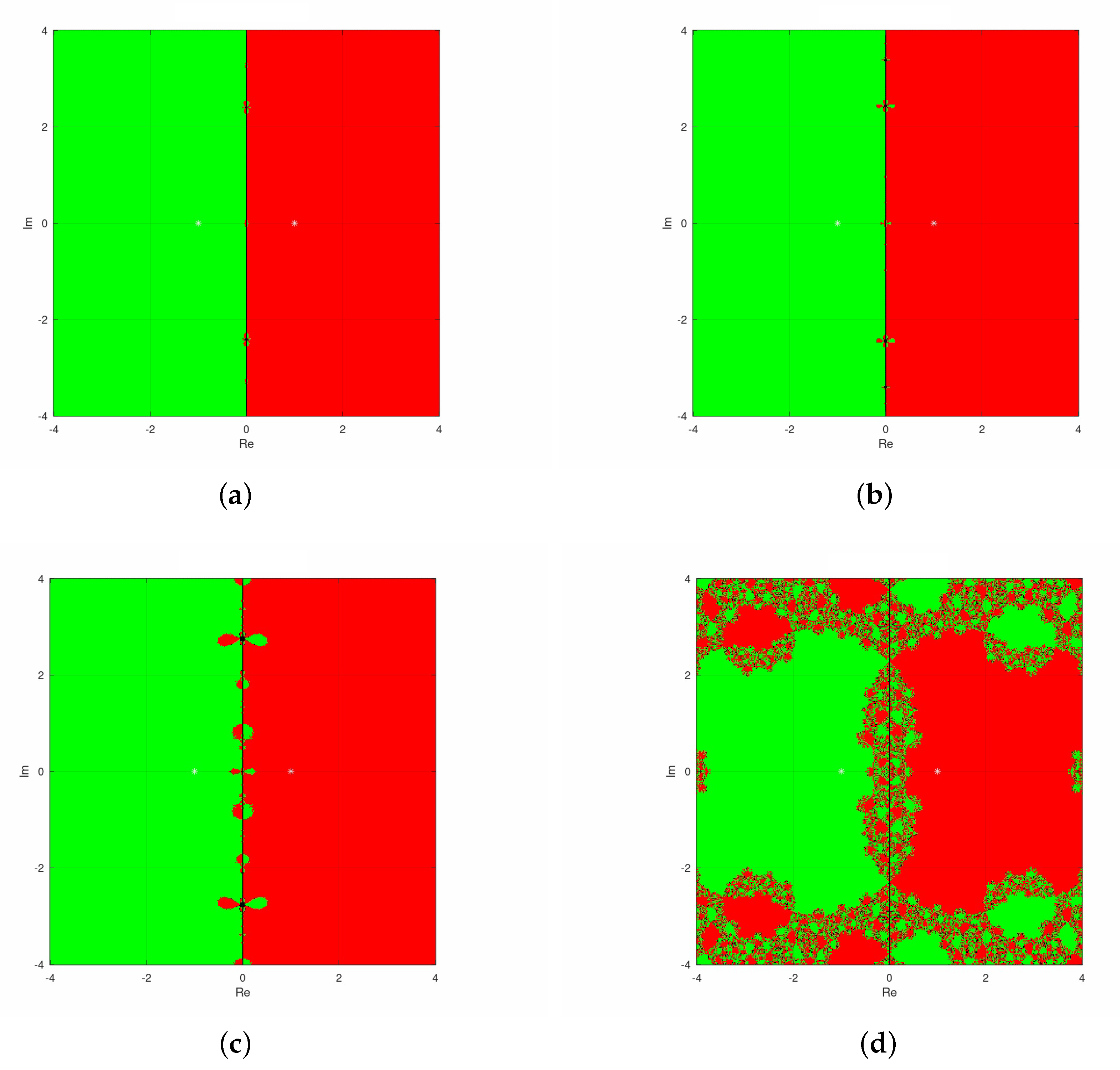
3. Dynamical Analysis
3.1. Exponential Family
3.2. Sinus Family
3.3. Polynomial Family
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Petković, M.S.; Neta, B.; Petković, L.D.; Dźunić, J. Multipoint Methods for Solving Nonlinear Equations: A Survey; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Hueso, J.L.; Martinez, E.; Teruel, C. Convergence, efficiency and dynamics of new fourth and sixth order families of iterative methods for nonlinear systems. J. Comput. Appl. Math. 2015, 275, 412–420. [Google Scholar] [CrossRef]
- Behl, R.; Kanwar, V.; Kim, Y.I. Higher-order families of multiple root finding methods suitable for non-convergent cases and their dynamics. Math. Model. Anal. 2019, 24, 422–444. [Google Scholar] [CrossRef]
- Amat, S.; Busquier, S.; Gutiérrez, J.M. Geometric constructions of iterative functions to solve nonlinear equations. J. Comput. Appl. Math. 2003, 157, 197–205. [Google Scholar] [CrossRef]
- Argyros, I.K. Computational Theory of Iterative Methods. Series: Studies in Computational Mathematics, 15; Chui, C.K., Wuytack, L., Eds.; Elsevier Publ. Co.: New York, NY, USA, 2007. [Google Scholar]
- Argyros, I.K.; Magreñán, Á.A. Iterative Methods and Their Dynamics with Applications: A Contemporary Study; CRC Press: Boca Raton, FL, USA; Taylor & Francis Group: Abingdon, UK, 2017. [Google Scholar]
- Argyros, I.K.; Magreñán, Á.A. A Contemporary Study of Iterative Methods: Convergence, Dynamics and Applications; Elsevier: Amsterdam, The Netherlands, 2017. [Google Scholar]
- Argyros, I.K.; Hilout, S. Computational Methods in Nonlinear Analysis. Efficient Algorithms, Fixed Point Theory and Applications; World Scientific: Singapore, 2013. [Google Scholar]
- Argyros, I.K.; Hilout, S. Numerical Methods in Nonlinear Analysis; World Scientific Publ. Comp.: Hackensack, NJ, USA, 2013. [Google Scholar]
- Kantorovich, L.V.; Akilov, G.P. Functional Analysis; Pergamon Press: Oxford, UK, 1982. [Google Scholar]
- Ortega, J.M.; Rheinboldt, W.C. Iterative Solution of Nonlinear Equations in Several Variables; Academic Press: New York, NY, USA, 1970. [Google Scholar]
- Rheinboldt, W.C. An adaptive continuation process for solving systems of nonlinear equations, Polish Academy of Science. Banach Ctr. Publ. 1978, 3, 129–142. [Google Scholar] [CrossRef]
- Sharma, J.R. Improved Chebyshev–Halley methods with sixth and eighth order of convergence. Appl. Math. Comput. 2015, 256, 119–124. [Google Scholar] [CrossRef]
- Sharma, R. Some fifth and sixth order iterative methods for solving nonlinear equations. Int. J. Eng. Res. Appl. 2014, 4, 268–273. [Google Scholar]
- Traub, J.F. Iterative Methods for the Solution of Equations; Prentice–Hall Series in Automatic Computation: Englewood Cliffs, NJ, USA, 1964. [Google Scholar]
- Madhu, K.; Jayaraman, J. Higher Order Methods for Nonlinear Equations and Their Basins of Attraction. Mathematics 2016, 4, 22. [Google Scholar] [CrossRef]
- Sanz-Serna, J.M.; Zhu, B. Word series high-order averaging of highly oscillatory differential equations with delay. Appl. Math. Nonlinear Sci. 2019, 4, 445–454. [Google Scholar] [CrossRef]
- Pandey, P.K. A new computational algorithm for the solution of second order initial value problems in ordinary differential equations. Appl. Math. Nonlinear Sci. 2018, 3, 167–174. [Google Scholar] [CrossRef]
- Magreñán, Á.A. Different anomalies in a Jarratt family of iterative root–finding methods. Appl. Math. Comput. 2014, 233, 29–38. [Google Scholar]
- Magreñán, Á.A. A new tool to study real dynamics: The convergence plane. Appl. Math. Comput. 2014, 248, 215–224. [Google Scholar] [CrossRef]
- Magreñán, Á.A.; Argyros, I.K. On the local convergence and the dynamics of Chebyshev-Halley methods with six and eight order of convergence. J. Comput. Appl. Math. 2016, 298, 236–251. [Google Scholar] [CrossRef]
- Lotfi, T.; Magreñán, Á.A.; Mahdiani, K.; Rainer, J.J. A variant of Steffensen-King’s type family with accelerated sixth-order convergence and high efficiency index: Dynamic study and approach. Appl. Math. Comput. 2015, 252, 347–353. [Google Scholar] [CrossRef]









© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moysi, A.; Argyros, I.K.; Regmi, S.; González, D.; Magreñán, Á.A.; Sicilia, J.A. Convergence and Dynamics of a Higher-Order Method. Symmetry 2020, 12, 420. https://doi.org/10.3390/sym12030420
Moysi A, Argyros IK, Regmi S, González D, Magreñán ÁA, Sicilia JA. Convergence and Dynamics of a Higher-Order Method. Symmetry. 2020; 12(3):420. https://doi.org/10.3390/sym12030420
Chicago/Turabian StyleMoysi, Alejandro, Ioannis K. Argyros, Samundra Regmi, Daniel González, Á. Alberto Magreñán, and Juan Antonio Sicilia. 2020. "Convergence and Dynamics of a Higher-Order Method" Symmetry 12, no. 3: 420. https://doi.org/10.3390/sym12030420
APA StyleMoysi, A., Argyros, I. K., Regmi, S., González, D., Magreñán, Á. A., & Sicilia, J. A. (2020). Convergence and Dynamics of a Higher-Order Method. Symmetry, 12(3), 420. https://doi.org/10.3390/sym12030420