1. Introduction
Using certain structural conditions such as boundary conditions makes it easier to analyze complex structural systems. For symmetric structural analysis such as square plate, only a quarter section of the structural body from the entire analysis area can be considered if the symmetry conditions apply. This concept of analysis has been widely used in the finite element method. In this respect, this study considers a novel structural analyzing method using the symmetry conditions of the symmetric structures.
Arched member is one of the important units that are commonly used in engineering applications. The functionally graded materials (FGMs) have become widely used for engineering purposes because of their advantages over conventional materials [
1]. The tapered members work distinctively from the prismatic member because the tapered cross-section yields effective stress distributions and a strong coupling between the stress resultants. Understanding the vibration behavior of structural systems is essential to the design, construction, and maintenance of structures [
2]. Considering the research topics stated above, this paper focuses on the free vibration of tapered arch made of axially FGMs to apply the symmetric conditions of the structures.
The following studies and their citations include mathematical models and historical reviews related to topics of this paper. For functionally graded beams/columns, much study has been conducted: Li [
3] studied dynamic behaviors of the prismatic beam, including effects of the rotatory inertia and shear deformation; Kukla and Rychlewska [
4] investigated free vibrations of clamped beams made of two different FGMs; Elishakoff et al. [
5] studied the free vibration of columns with Duncan’s mode shape by considering a fifth-order polynomial based on the Rayleigh-Ritz method; Rezaiee and Masoodi [
6] investigated exact natural frequencies of the tapered beam-columns; Huang and Li [
7] investigated a novel approach for analyzing the free vibration of tapered beams; Shahba and Rajasekaran [
8] conducted the stability analysis of tapered beams where the governing equations for free vibration were solved using the differential transform element method (DTEM); Rajasekaran [
9] studied the natural frequencies of Timoshenko beams using DTEM; and Akgoz and Civalek [
10] studied free vibrations of the tapered rectangular functionally graded microbeam based on the modified couple stress theory. Chandran and Rajendran [
11] and Ranganathan et al. [
12] studied the buckling of columns. On the other hand, Carrera et al. [
13] investigated the Layer-Wise (LW) models for the electro-mechanical analysis of shell-structures with applied symmetry boundary-conditions.
In particular, for functionally graded arches directly related to this study, very little research was carried out. Malekzadeh et al. [
14,
15] studied free vibrations of the arch with temperature-dependent properties which is more applicable to laterally functionally graded arch. For AFG arch, Rajasekaran [
16] investigated the free vibration of the parabolic arch using DTEM; Noori et al. [
17] studied forced vibrations of the parabolic arch using the complementary functions method combined with the Laplace transform; and Lee and Lee [
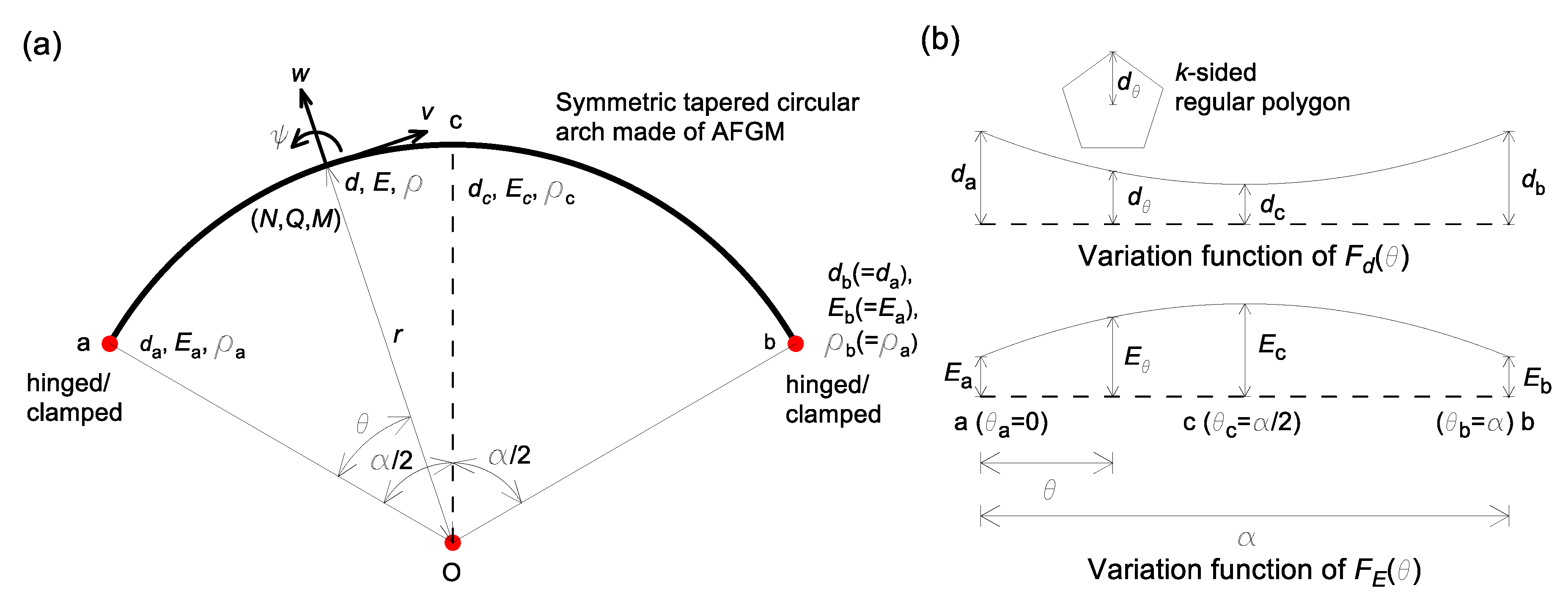
18] studied the free vibration of uniform circular AFG arch. Most of previous works, however, have focused on the arches of conventional cross-section (e.g., circle and rectangle) with homogenous properties in the axial direction. In contrast, the study of arches with regular polygon cross-section and material inhomogeneity has not reported in literature.
This paper presents differential equations that govern the free vibration of a tapered AFG circular arch with regular polygon cross-section including the rotatory inertia couple. To calculate natural frequencies and mode shapes of the arch, the governing equations are solved numerically using the boundary conditions, i.e., symmetric and anti-symmetric boundary conditions [
19], at the mid-arc of the arch as the initial and boundary value problems. For verification purpose, the predicted natural frequencies are compared with those of the finite element software ADINA. Parametric studies on natural frequencies of the arch are extensively discussed and the mode shapes are reported.
The following assumptions were made to formulate the mathematical models: AFG circular arch is linear elastic, the shear deformation effect is negligible, the deformation is small, and the free vibration is based on the harmonic motion. In addition, the variable functions of the taper and the mechanical property of the arch are assumed to be a univariate quadratic polynomial.
3. Numerical Methods and Validation
Based on the analysis above, three FORTRAN computer programs were coded to calculate frequency parameters
and their mode shapes
,
. The ‘hinged-hinged
’ and ‘clamped-clamped
’ end conditions are considered for a given set of the input parameters
and
or
. The trial eigenvalue method was used to calculate
, i.e., eigenvalue in Equations (27) and (28). The Runge-Kutta method [
22], one of the direct integral methods, was used to calculate
,
and the determinant search method enhanced by Regula-Falsi method [
22] was used to compute
. Two lowest
of the symmetric and anti-symmetric frequencies, i.e., totally four
, were calculated. Interested readers may refer to prior studies [
18,
20,
23] dealing with this kind of numerical method where the trial eigenvalue method using the direct integral method and the determinant search method were described in detail.
Three integration intervals are applied to perform numerical integration on the differential equations: Interval [a,b] with
; interval [a,c] with
and interval [c,b] with
, shown in
Table 1. Here, the interval [a,b] is the classical interval commonly used for free vibration analyses involving the arch structure. The intervals [a,c] and [c,b] are adopted in this study, but not yet reported in the literature. In
Table 1, the integration starting with the initial conditions and the integration ending with the boundary conditions are tabulated in detail with the boundary conditions in Equations (29)–(32). Note that the last boundary conditions in Equations (31) and (32) can be replaced by the alternative boundary conditions presented in
Appendix B.
It is important to choose the suitable step size
in the Runge-Kutta scheme prior to integrating differential equations. The
is calculated using the following equation for a given number of dividing elements
against the subtended angle
.
The convergence analysis was performed on
and the results are shown in
Figure 4 where the input arch parameters are presented. One can see that
solution with
converges to a solution with
with a convergence rate of
(e.g.,
), as shown in the first symmetric frequency
. All computations were carried out on a PC for the two lowest symmetric and anti-symmetric frequencies, i.e., four frequencies
, with
.
The numerical results of
computed from the three integration intervals of [a,b], [a,c], and [c,b] shown in
Table 1 are compared in
Table 2, where the input arch parameters are presented. In
Table 2, the classification of the predicted mode shapes (e.g., symmetric
and anti-symmetric
, etc.) is presented. All predictions
calculated in these three intervals are exactly the same as each other, including symmetric and anti-symmetric mode distinctions. This comparison demonstrates that the governing equations and numerical methods, particularly the boundary conditions of symmetric and anti-symmetric in the mid-arc developed herein, are correct.
For validation purposes, the predicted natural frequencies
in Hz were compared to those obtained from the finite element software ADINA (
Table 3). The input arch parameters in the dimensional form are:
(square),
. The AFGM is graded from the pure aluminum
at the ends
and
and the pure zirconia
at the mid-arc
. From these arch parameters in the dimensional form, the dimensionless parameters are computed as
. Based on the predicted
value,
is obtained from Equation (26) as:
The predicted
shown in
Table 3 are very consistent with the results of ADINA within a 2% error. This comparison serves to verify theories, particularly the symmetric and anti-symmetric boundary conditions at the mid-arc, and numerical methods developed in this study.
4. Numerical Analysis and Discussion
Parametric studies of the frequency parameter and its mode shape was carried out and the results are discussed extensively. Hereafter, all numerical calculations were performed using the integration interval of [a,c]. The classification of mode shape is shown in parentheses as () for symmetric and () for anti-symmetric mode in Tables and Figures.
A selected analysis was performed to analyze effect of rotatory inertia
on
. Representative results are listed in
Table 4 in which the following conclusions are drawn: (1)
is always lower with rotatory inertia
than without rotatory inertia
as intuitive based on the conventional arch analysis; (2) the frequency reduction is magnified by a higher mode
and larger depth ratio
; and (3) the rotatory inertia decreases the frequency by
or less for
and by
or less for
, respectively.
Table 5 shows the effect of side number
on
. The
with larger
becomes larger and converges to
with
(circular cross-section). This is because the area
and the second moment of plan area
with smaller
are smaller, even though the radial depths
are the same.
The numerical results with the rotatory inertia index
of the parametric analysis are shown in the frequencies curves of
Figure 5,
Figure 6,
Figure 7,
Figure 8 and
Figure 9. The considered system parameters of the end condition (
and
), subtended angle
, integer side number
modular (also density) ratio
, taper ratio
and radial depth ratio
are given in the respective figure. The numerical results are represented for the four lowest
, i.e., two symmetric and two anti-symmetric modes. In addition, in
Figure 5,
Figure 6,
Figure 7,
Figure 8 and
Figure 9, the frequency curves from lower mode number
to higher
are presented from bottom to top.
Figure 5 shows
versus
curves. It is observed that
increases as
increases except for the second anti-symmetric frequency
of
arch. The increasing and decreasing rates of
to
is very moderate, not sensitive, so that the effect of
on
is very minor, especially negligible in the domain of
.
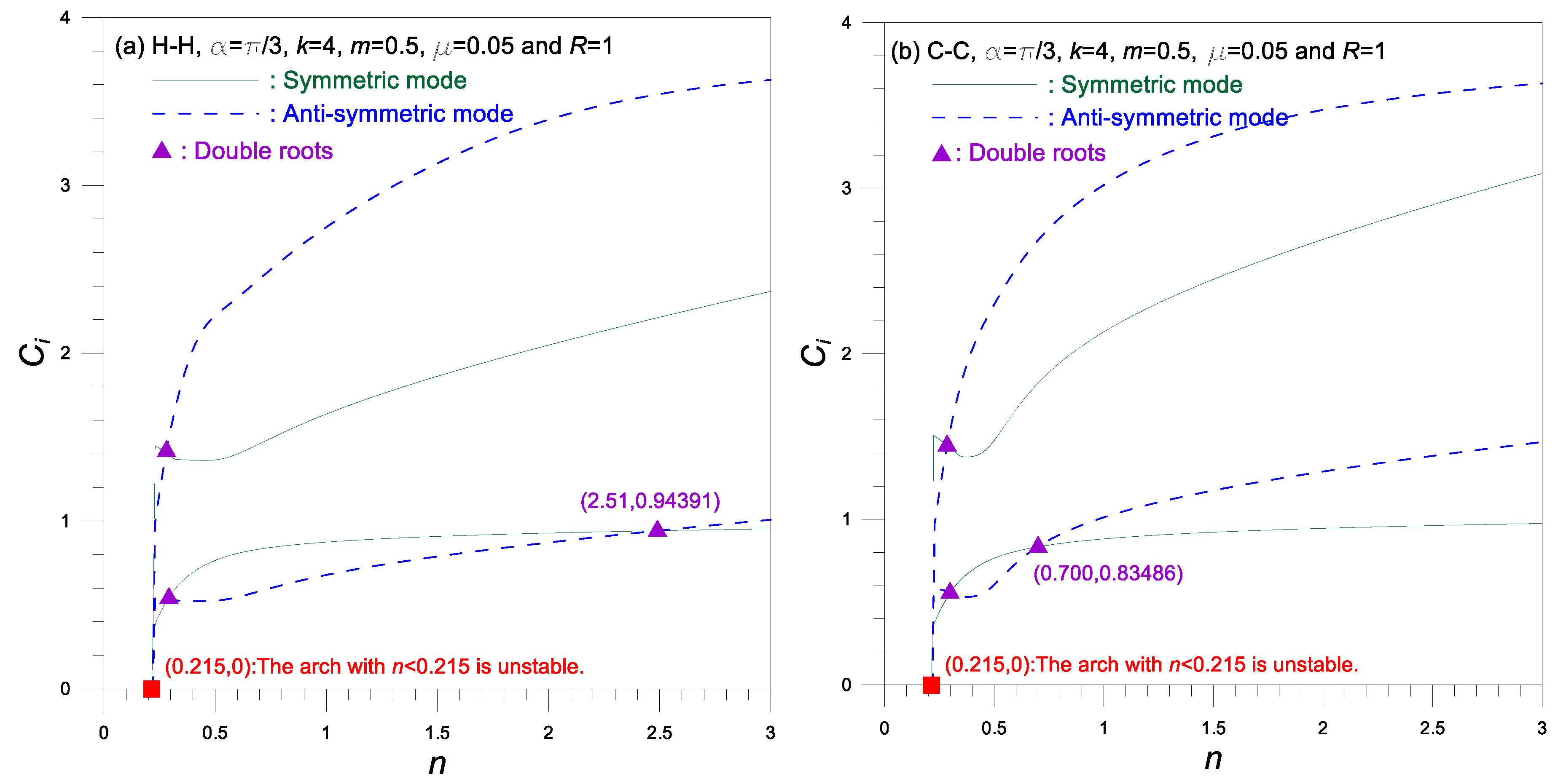
Figure 6 shows frequency curves for
versus
, where
generally increases as
increases for about
. However, for some of the frequency curves,
decreases and reaches a lowest coordinates (
) and increases as
increases for
. The frequency curves in the symmetric and anti-symmetric mode intersect each other at the coordinates marked
. This implies that at a single taper ratio
, there exists a double eigenvalue
(i.e., the symmetric and anti-symmetric frequency parameters
. For example, double eigenvalues
exist at coordinates of
for
arch and
for
arch marked
▲. At this cross-coordinate, a mode transition occurs, which changes the mode shape from symmetric to anti-symmetric mode, and vice versa [
18]. For example, in
Figure 6a of
arch, in the domain immediately preceding
, denoted by
▲,
is anti-symmetric and
is symmetric, whereas in the domain immediately behind it, the mode shape order is reversed. Particularly,
values, approaching to
at
marked by
■, demonstrate that the arch with
is unstable and buckles due to its self-weight without external loads or excitations. It is also observed in this figure that as the value of
increases, the frequencies for C-C arches are generally higher than those for H-H arches.
Figure 7 shows the frequency curves for
versus
, where
increases as
increases. The frequency curves of symmetric and anti-symmetric mode intersect each other at the coordinates marked
▲ as previously described in
Figure 6. The frequencies for C-C arch are generally higher than those for H-H arches, when the value of
are higher.
Figure 8 shows
versus
curves. The
decreases as
increases and the smaller
, the steeper the rate of decrease. The frequency curves of symmetric and anti-symmetric mode intersect each other at the coordinates marked example
▲ as previously described in
Figure 6.
Figure 9 shows typical examples of the mode shapes, in which the mode shapes are classified into symmetric and anti-symmetric mode. The deflections
were initially calculated separately, but combined in a vector quantity, resulting in a deformed axis (i.e., a mode shape). In these mode shapes, the characteristics of the symmetric and anti-symmetric mode shapes are well depicted, which is represented in the conceptual diagram in
Figure 3. This kind of mode shape describes the relative amplitude and the locations of maximum amplitude and nodal point, which is one of the most important data for monitoring the soundness of the arch in service.
5. Concluding Remarks
This study focused on the free vibration of the symmetric tapered circular arch made of AFGMs. Based on the dynamic equilibrium equations for an arch element, the sixth order ordinary differential equations governing the free vibration of such arch were derived. In particular, the symmetric and anti-symmetric boundary conditions at the mid-arc of the arch, not yet covered in the literature, are derived. For mathematical formulation, the quadratic polynomials are chosen as both taper and mechanical property functions. The trial eigenvalue method was used to solve these differential equations: the direct integral method of the Runge-Kutta method was used to compute the mode shapes, and the determinant search method enhanced by the Regula-Falsi method was used to compute the eigenvalues, i.e., natural frequencies. In particular, to adopt the boundary conditions, three integration intervals (the main concern of this study) were used: (a) from the left end to the right end (), (b) from the left end to the mid-arc (), and (c) from the mid-arc to the right end (). The frequencies predicted in this study are in good agreement with those from the finite element software ADINA. The two lowest frequencies of the symmetric and anti-symmetric frequencies (i.e., totally four frequencies) were calculated. Based on the numerical experiments of this study, parametric studies on the frequencies and mode shapes are extensively discussed.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}