1. Introduction
Our perception of the real world is never fully precise. Our decisions are always made with a certain level of uncertainty or lack of some pieces of information. Mathematical tools that make this decision making easier include
fuzzy sets [
1],
rough sets [
2,
3] or
soft sets [
4]. In the
algebraic hyperstructure theory, i.e., in the theory of
algebraic hypercompositional structures, there are numerous constructions leading to such structures. One of these is the application of the
Ends lemma [
5,
6,
7] in which the hyperoperation is the principal end of a partially ordered semigroup. For some theoretical results regarding the construction, see for example Novák et al. [
7,
8,
9]. In [
9] the authors modify the construction in order to increase its applicability.
In our paper we develop an idea similar to [
9,
10,
11]. With the help of matrix calculus, which we believe is a suitable tool, we construct cyclic hypergroups and their invertible subhypergroups. Notice that matrix calculus linked to the theory of algebraic hypercompositional structures has been used as a suitable tool in various contexts such as [
12,
13,
14]. Since the notion of hypercompositional cyclicity has a rather complicated evolution, we recommend the reader to study [
15], which gives a complex discussion of the topic, and [
16] which is the source of our definition.
In [
17] the authors consider the application of rough sets in various contexts based on establishing the set describing its upper and lower approximation. In a general case, this issue is discussed, e.g., in [
11,
18,
19]. Suppose that we can see the Ends Lemma as a certain boundary used in various areas such as economics (the need to generate
at least certain profit), electrical engineering (the transistor basis of a p-n junction needs
at least certain current for the charge flow yet this must not be too great), etc. Motivated by these considerations we investigate hypercompositional structures constructed with the help of the principal end (or beginning) and their subhyperstructures. We study their cyclicity and their generators. In the context of rough sets we use cyclic hypergroups to construct the universum with the help of indiscernibility relation and its subhyperstructures describing their upper and lower approximations. In order to describe these we make use of some natural relations between matrix characteristics. In the end of our paper we demonstrate how this type of rough sets, especially the upper approximations, can be used for description of an area monitored by sensors of autonomous robotic systems.
3. Single-Power Cyclic Hypergroup of Matrices
In order to construct a single-power cyclic hypergroup of matrices, we first, for an arbitrary pair of matrices
, define a hyperoperation by
where
is such a matrix
that
and
is the set of all matrices greater than
, i.e.,
. Thus, using terminology of Chvalina [
5],
is an
extensive hypergroupoid, i.e., for an arbitrary pair of matrices
there is
. Notice that some other authors, motivated by the geometrical meaning, call such hypergroupoids “closed” as contrasted to “open”.
Example 2. For matrices and from Example 1 we have: Remark 1. With the above example we not only demonstrate the meaning of the hyperoperation “∗” but also provide an example to the forthcoming Lemma 3. In this respect notice that , and , which means that . Since in our paper we regard as a part of , writing the hyperoperation (5) explicitly in the form of union is not neccessary. However, for, as an example, the hyperoperation would no longer be extensive (without explicitly including ). Indeed, The result of the hyperopration is influenced by the absolute value in the calculations of the matrix norm. Since in our paper we restrict ourselves to positive entries of matrices, especially in Section 4 we could omit the two-element set in the definition of the hyperoperation. Yet in our paper we prefer being more general, especially as far as the construction of the hyperoperation is concerned. Since negative values violate extensivity, we prefer including the two-element set in (5). Another way of preserving extensivity would be to modify the row norm by leaving out absolute values. In this respect also notice the result proved by Massouros [24] which says that adding to , where is a group or a hypergroup, i.e., defining , results in the fact that is a hypergroup. Example 3. Suppose we have a manufacturing company with two production lines , such that both lines produce products A and B. Consider some specific conditions for production under which the first line only produces 10 pieces of A and 5 pieces of B per week, and the line only produces 6 pieces of A and 7 pieces of B per week. This can be denoted by: In the following week, under the same specific conditions, the production can be described by . The norm of the matrix, i.e., 15 in case of and 13 in case of , describes the production of the better line. The result of the hyperoperation (5), i.e.,describes all possibilities for the minimal guaranteed production in case that in future the same conditions repeat. The associativity of the hyperoperation means that if we have more conditions of the same type, their order is not important for the value of the guaranteed minimal production. Now we include several lemmas which will simplify proofs of our forthcoming theorems. Recall that e stands for the smallest element of , i.e., the set of entries of matrices in .
Lemma 1. The matrix is a unit of . Moreover, there is .
Proof. Obvious because for all holds □
Lemma 2. Every matrix is idempotent (with respect to *).
Proof. Obvious because for all
holds
which means that
. □
Lemma 3. For an arbitrary pair of matrices , where , there is Proof. We consider that
,
and
. Then we have
For every row of the matrix, i.e., for every
, there is
Thus, it is obvious that □
Theorem 1. The extensive hypergroupoid is a commutative hypergroup.
Proof. Commutativity of the hyperoperation is obvious because the operation min is commutative. Next, we have to show that associativity axiom is satisfied, i.e., that there is for all .
We calculate left hand side:
For the right hand side we have:
The left hand side and the right hand side are the same except for the last part of the union. We are going to show that
The following calculation holds for all
:
Thus the associativity axiom holds, which means that the hypergoupoid
is a semihypergroup. Finally, because of extensivity of the hyperoperation (
5) we immediately see that reproduction axiom holds as well, i.e., the semihypergroup
is an extensive hypergroup. □
Now we can include the result concerning cyclicity of the discussed hypergroup. Notice that since we use n to denote one of the dimensions of the matrices, we will denote period of Definition 1 by p instead of n.
Theorem 2. If the set has the smallest element e, then the hypergroup is single-power cyclic and all matrices containing e (other than ) are generators of with period .
Proof. The proof is rather straightforward. Denote by
an arbitrary matrix from
such that at least one of its entries (e.g.,
) is
e. By definition,
. By Lemma 2, we have that
. Now, consider such a matrix
, elements of which are different from
e at least at those places where
. For example, consider matrix
, where
. Obviously, there is
. Now, we have
Since we know that
, there is
Thus we have that , which means that is single-power cyclic with period with generators being all matrices of the form . □
Example 4. Suppose , i.e., consider the semiring of natural numbers including zero. Then all matrices containing 0 are generators of . For and e.g., matrix generates . Indeed, If we now denote by a matrix with and all other elements zero, then . We can see that Theorem 3. The unit matrix is a generator of with period 2.
Proof. Proof is obvious to thanks relation “, the fact that we regard total order on and given the proof of the Lemma 1. We have that . □
It will be useful to investigate cyclicity of hypergroups , where is a finite set. Notice that in the case of a finite set we cannot construct an analogue of matrix with entry as we did in Example 4, simply because need not be an element of . Also, since is finite and we suppose that it is a chain, its smallest element e always exists.
Theorem 4. If is finite, then the hypergroup is single-power cyclic and all matrices containing the smallest element of , denoted by e, are generators of with period , where m is the number of columns of .
Proof. The proof is analogous to the proof of Theorem 2, except for the row of
containing element
e. We construct matrix
in the following way: the row of
which in
contains
e, will consist of
m copies of the greatest elements of
, denoted
u, while all other entries of
will be equal to
e. In this way we have
, i.e.,
. We calculate once again, now
:
Next, we reorganize entries in the first row, which does not affect the row norm. We get
Now it is obvious that after we do this procedure times, we obtain matrix , for which there is . □
Example 5. Consider and . In this case matrix is a generator of with period . Indeed, we calculate: It is obvious, following from the use of the row norm, that . We get And we see that .
Remark 2. The generators described by Theorem 4 are neither only ones nor with the smallest period. Indeed, if in Example 5 we consider matrix , there is . Then and and we see that is a generator of with period .
4. Approximation Space Determined by the Cyclic Hypergroup
Now we rewrite some basic terminology of the rough set theory introduced by Pavlak [
3] into our notation.
Let be a certain set called the universe, and let be an equivalence relation on . The pair will be called an approximation space. We will call an indiseernibility relation. If and , we will say that and are indistinguishable in . Subsets of will be denoted by , possibly with indices. The empty set will be denoted by 0, and the universe will also be denoted by 1. Equivalence classes of the relation will be called elementary sets (atoms) in or, briefly, elementary sets. The set of all atoms in will be denoted by . We assume that the empty set is also elementary in every . Every finite union of elementary sets in will be called a composed set in , or in short, a composed set. The family of all composed sets in will be denoted as . Obviously, is a Boolean algebra, i.e., the family of all composed set is closed under intersection, union, and complement of sets.
Now, let X be a certain subset of . The least composed set in containing X will be called the best upper approximation of X in , in symbols ; the greatest composed set in contained in X will be called the best lower approximation of X in , in symbols . If is known, instead of we will write , respectively. The set (in short ) will be called the boundary of X in .
Definition 2 ([
20])
. Let H be a set and R be an equivalence relation on H. Let A be subset of H. A rough set
is a pair of subsets of H which approximates A as closer as possible from outside and inside, respectively: Example 6. Let and R be defined on S by: In this way we obtain the following decomposition of S: Now, consider . Then In what follows we consider square matrices, i.e., only.
In order to study links between rough sets and the above cyclic hypergroup
, or rather its special case
, we need to define a new relation
on
. For all
we define:
It is obvious that such a relation is reflexive, transitive and symmetric. In this way we obtain a decomposition of into equivalence classes by row norm of matrices and their traces.
We denote by
an arbitrary subset of
with entries from
, where
is a set generated by the principal beginning
, where
and ≤ is the total order defined on
which we had already regarded. To sum up,
Theorem 5. Every hypergroup , where is defined by (
8),
is an invertible subhypergroup of the hypergroup . Proof. Recall that for and invertible subhypergroup A of a hypergroup H there holds for every .
Consider now an arbitrary set
, where
is defined by (
8). It is obvious that
. Then we have that
for all
, this is because
. By the proof of Theorem 3 we have that
. For
the proof is the same. Thus we obtain that
is an invertible subhypergroup of
. □
By applying Theorems 4 and 5 we immediately obtain the following corollary.
Corollary 1. Every is single power cyclic.
In the paper we assume that is a chain and an equivalence . As a result we can consider the set as a suitable set for constructing lower and uper approximations, i.e., and . When discussing our system , we can see that every subset is in the beginning of the system, i.e., the class with the smallest trace and the smallest row norm of the matrix is included in the lower and uper approximations.
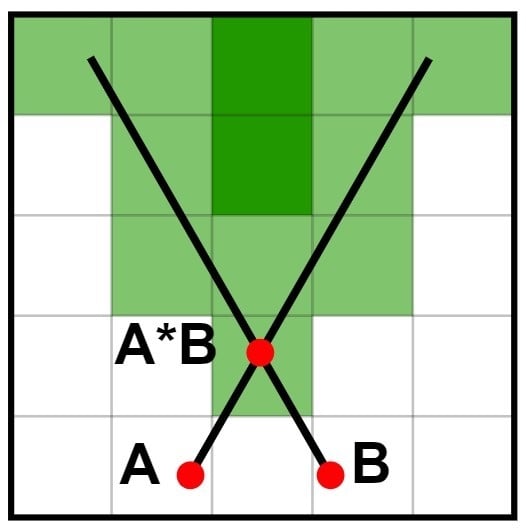
Notation 1. Our results regarding rough sets are visualised by means of figures. In all figures, a white square means that there does not exist any matrix with the given properties created by the approximation set, a coloured square means that all matrices with the given properties belong to the approximation set, and a partially coloured square that there exists at least one matrix with the given properties which belong to the approximation set and at least one matrix which does not belong to it.
Example 7. Consider and , i.e., is the set of Boolean matrices. Then is invertible in . Since , we have, for an arbitrary pair of matrices that and . Moreover, The upper approximation, i.e., the set , is in Figure 1 visualized as the union of all squares which include some coloured parts. The lower approximation, i.e., the set , is the union of all square which are fully coloured. Theorem 6. Let and be invertible hypergroups in , where is defined by for , , with relation . Then there iswhere n is the size of the matrix. Proof. For the proof we use the idea of Example 7 and
Figure 1, in which the lower approximation is the union of all squares which are fully coloured while the upper approximation is the union of all squares which contain some coloured parts. Notice that in
Figure 1 rows indicate matrices with the same row norm (counted from the bottom) while columns (counted from the left) indicate matrices with the same trace. When one realizes how such a scheme in constructed, the proof becomes obvious. Indeed, take e.g.,
and focus on
Figure 2 and (
9).
□
Remark 3. Note that the boundary, defined as the difference between the upper and the lower approximation, expands across the universe so that it has only two classes for and 7 classes for and 14 classes for and 23 classes for , i.e., classes for an matrix. Also, the upper approximation has classes and the lower approximation has classes. All these formulas can be easily seen in Figure 1 and Figure 2. In what follows, we will consider
and
, where
. In this way the construction can be considered as a dynamic system, where the set
X is the hyperoperproduct defined by (
5).
Corollary 2. For there is . Moreover, Now we will use the relation to present some basic and natural properties of the lower and upper approximations with respect to the above mentioned theorem. Recall that matrices are generators of the cyclic hypergroup .
Theorem 7. The following properties hold:
- (1)
- (2)
- (3)
Recall that when defining the relation
in (
7) we used the row norm and trace. Let us now modify the definition to make use of the row norm and determinant. We define:
If we use the relation
instead of
,
Figure 1 changes to
Figure 3. This results in the following theorem.
Theorem 8. Let and be invertible hypergroups in , where is defined by for , with relation . Than there iswhere n is the size of the matrix. Proof. We use
Figure 3 and
Figure 4 in the proof. For an arbitrary size of the matrix,
n, the lower approximation always consists of 6 classes of equivalence. Obviously, for an arbitrary
n and
there exists only one matrix (the null one), which is in
, see the coloured square. For norm equal to 1, the proof is again obvious because thanks to the norm in every matrix of size
n there can be maximum one 1 in every row, which means that the determinant of such a matrix can only be
, 0 or 1. For norm 2 there exists, for an arbitrary size
n a matrix with element 2 and zero determinant. Also, there exists a matrix which has one row with two 1’s. If we repeat such a row, the determinant is zero, see the partially coloured square. At the same time no matrix with 2 as an entry can be in a class with norm 2 and determinant 1 oe
because in that case the respective row must contain only zeros as other entries. If we now expand the determinant with respect to that row, the calculation will include
, where
s is a subdeterminant and
, which means that the determinant can never be 1 or
. For norm 3 we get that the numbers of matrices can include 2 and 1, which means that the calculation of the determinant will include a difference, i.e., we can get an arbitrary number. In other words, for norm greater than 2 we cannot obtain fully coloured squares, i.e., classes of equivalence which consist only of matrices with entries 0 and 1. □
Finding a general rule for the upper approximation when using the determinant is not as easy as it may seem. Even though it seems that the whole universum “behaves accordingly”, it is not easy to find an algorithm which would easily define the upper approximation. Therefore we at least include a theorem which shows an important property of the upper approximation. At the same time, its proof describes the upper approximation for .
Theorem 9. For , and , the following holds: Proof. For the proof we use
Figure 3 and
Figure 5. Results for
and
, which had been computed by software means, are included below. □
Application in the Control Theory
Application of rough set theory is widely used in information technologies. This approach has fundamental importance in knowledge acquisition, cognitive science, pattern recognition, machine learning, database systems, etc. Rough sets are also used in sensors mapping in robotics.
If we examine how an autonomous mobile robot can get from point A to point B, we realize that it must have information about obstacles in front of itself to avoid collision. To find this out it uses sensors, mostly
camera and LIDAR (an abbreviation of “Light Detection And Ranging”) for environment mapping [
25,
26].
We can easily find surjective function from a set of
matrices (our model) to coordinates
, where
. These are coordinates of occupancy grid [
26] cells (robotics usage), which must meet the following condition:
where
are real coordinates that represents the interval/size of the cells in occupancy grid (see
Figure 6). This process is called
quantization. We can mark the occupancy grid as
equivalence classes.
Both sensors can be attached to specific places on the top of robot. (Notice that all visualised information from sensors what we are working with are projected from 3D to 2D plane because of assumption that the robot can move only in 2 directions.) In our figures (for , for example) the lower approximation describes the robot’s shape and pose. We can be sure for occupation of these cells because of the fusion of sensor data with the known relative position between the sensors and the robot (its shape) in particular. As we can see, this approximation will never change depending on change of n (matrix size). This lower approximation is typical for an industrial warehouse robot.
Next part of LIDAR/camera scan is the upper approximation. This gives us information about all cells which were hit by the sensors. However, we can only say that these cells are occupied with probability between 0 and 1 (never 0 or 1) because this is how all current sensor work. The bigger the n, the bigger the range of sensors. Notice that the sensor scanning angle is symmetric by vertical axis of the sensor.
The above example makes use of a single sensor scan. However, we can process these scans into a whole simple mapping algorithm described in [
12,
26] or improved algorithm via particle filter described in [
27].


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






