UAV Group Formation Collision Avoidance Method Based on Second-Order Consensus Algorithm and Improved Artificial Potential Field

Abstract
1. Introduction
2. Consensus Algorithm
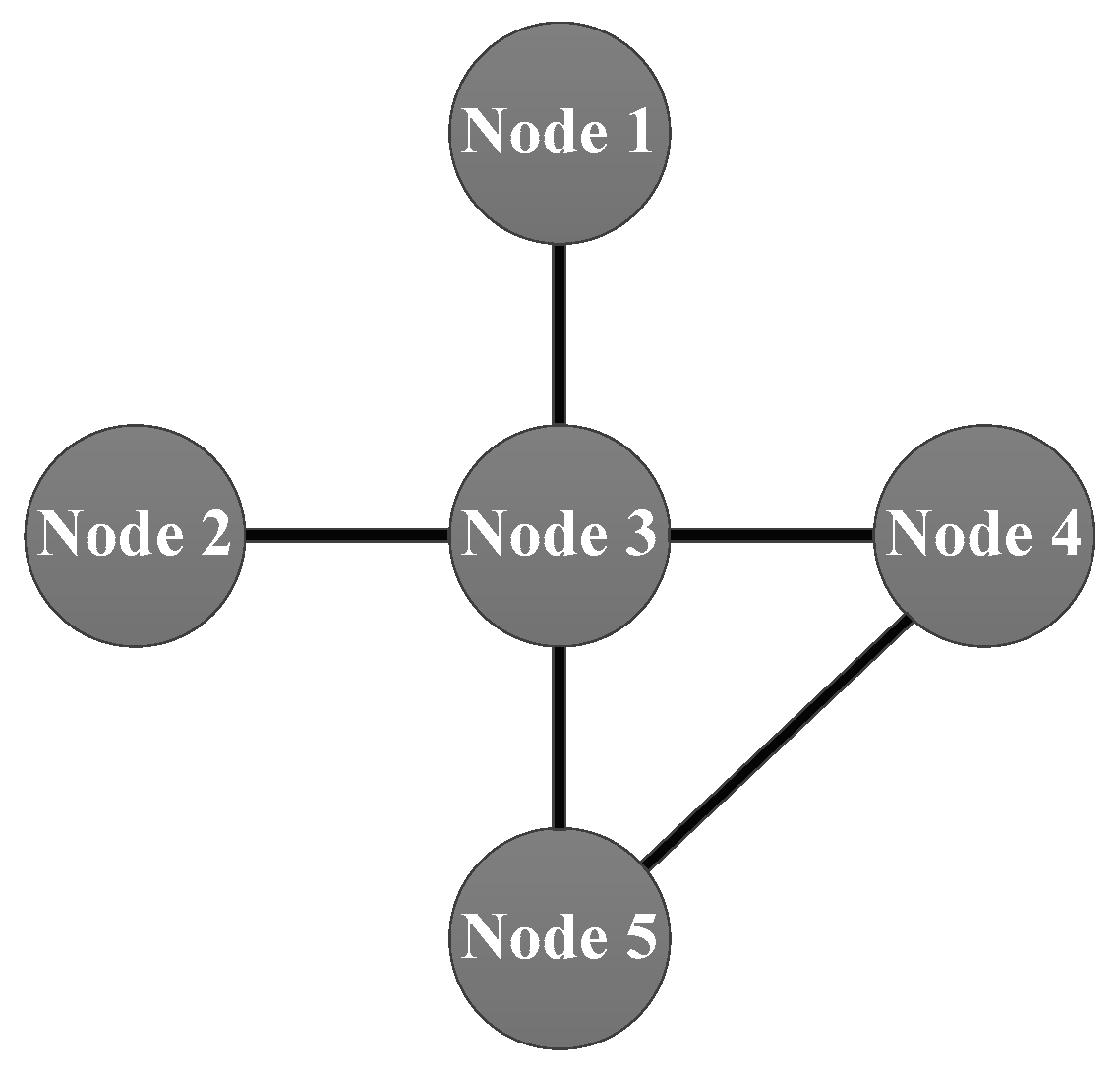
2.1. Graph Theory
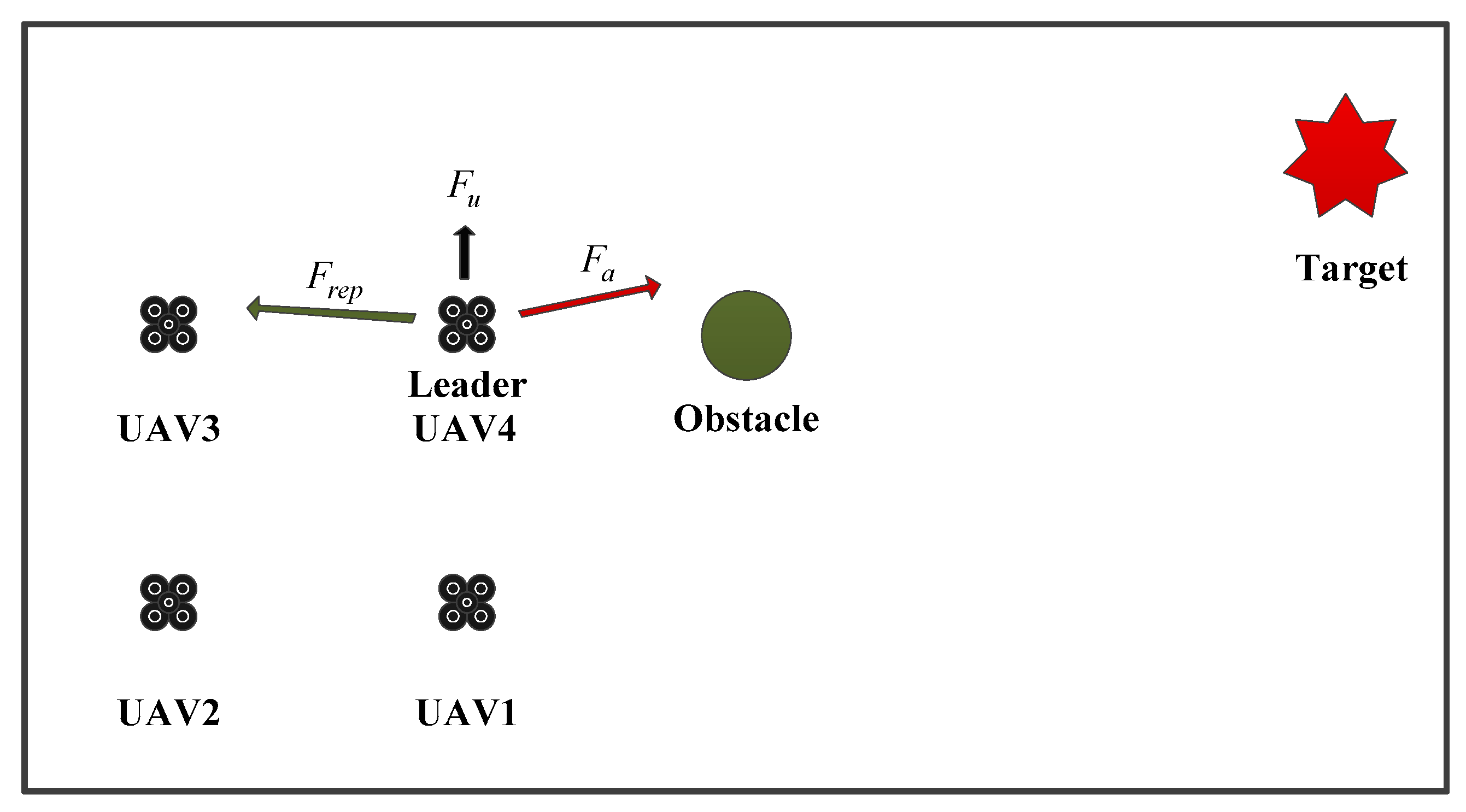
2.2. Artificial Potential Field Method
3. Second-Order Consensus Formation Control Model and Improved UAV Collision Avoidance Method
3.1. Formation Control Continuous Time Domain Model
3.2. Discretized Data Processing
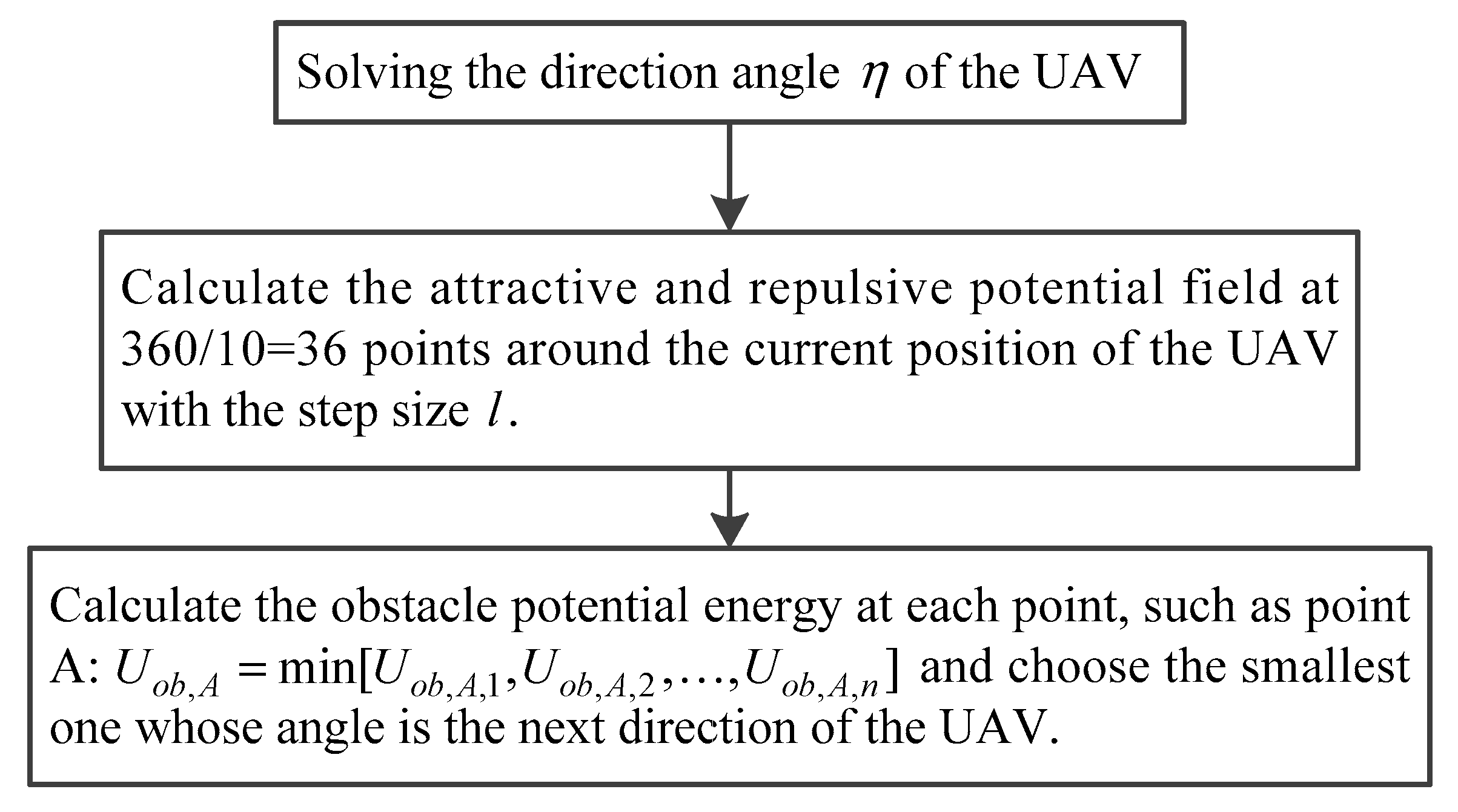
3.3. Path Optimization Based on Improved Artificial Potential Field Method
3.4. UAV Formation Keeps Cluster Collision Avoidance Method
4. Simulation Case
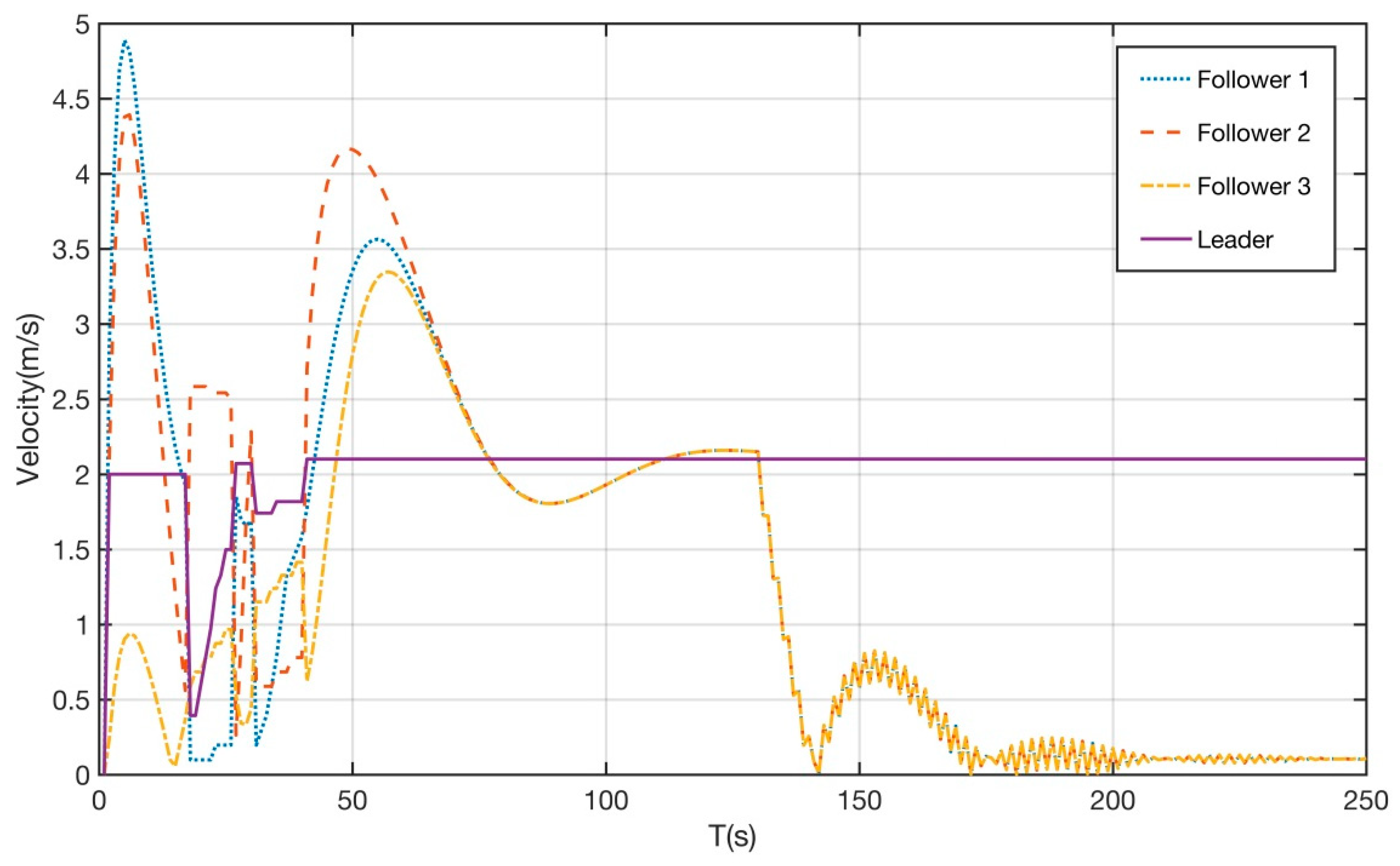
4.1. Static Obstacle Scene
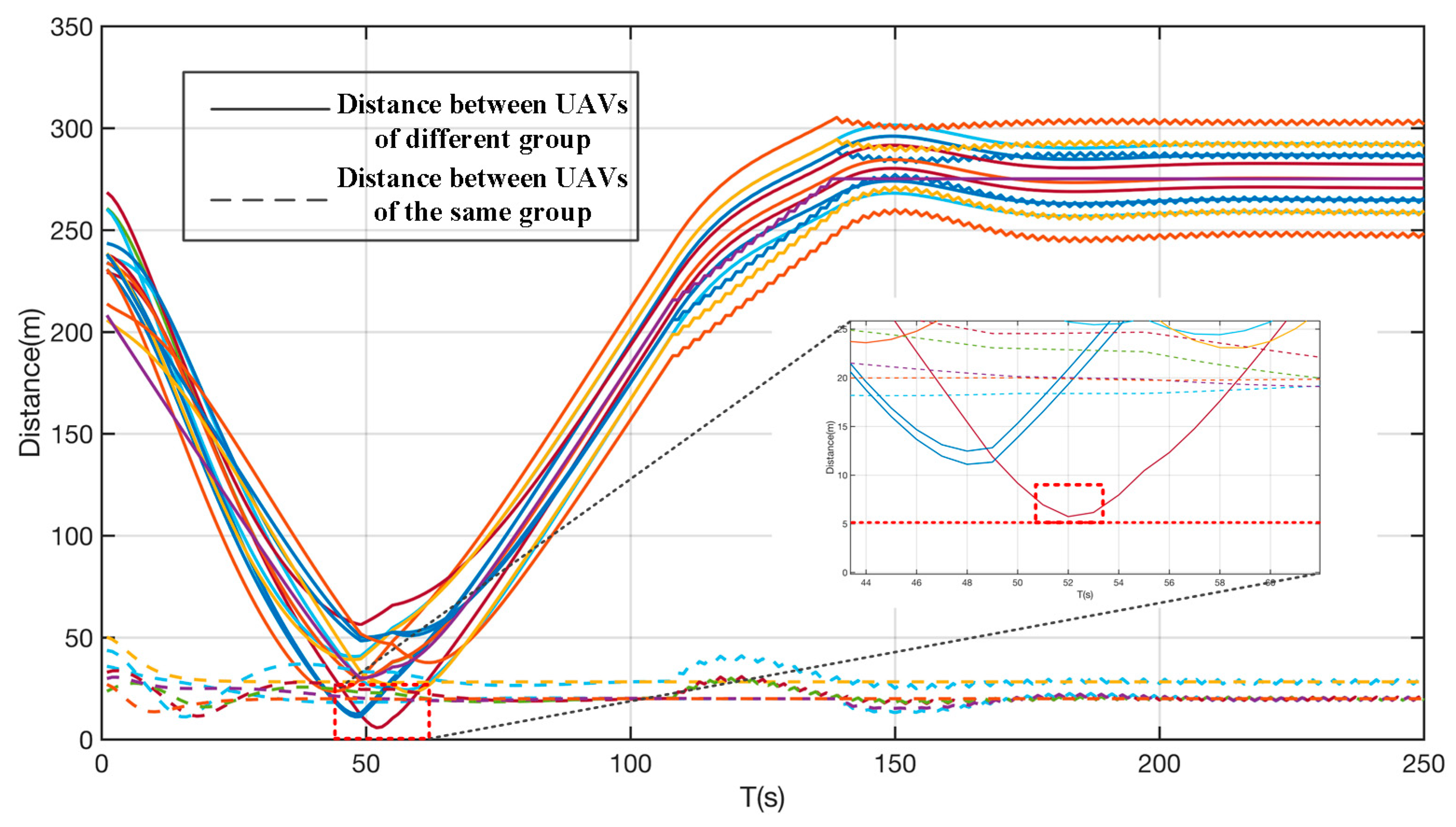
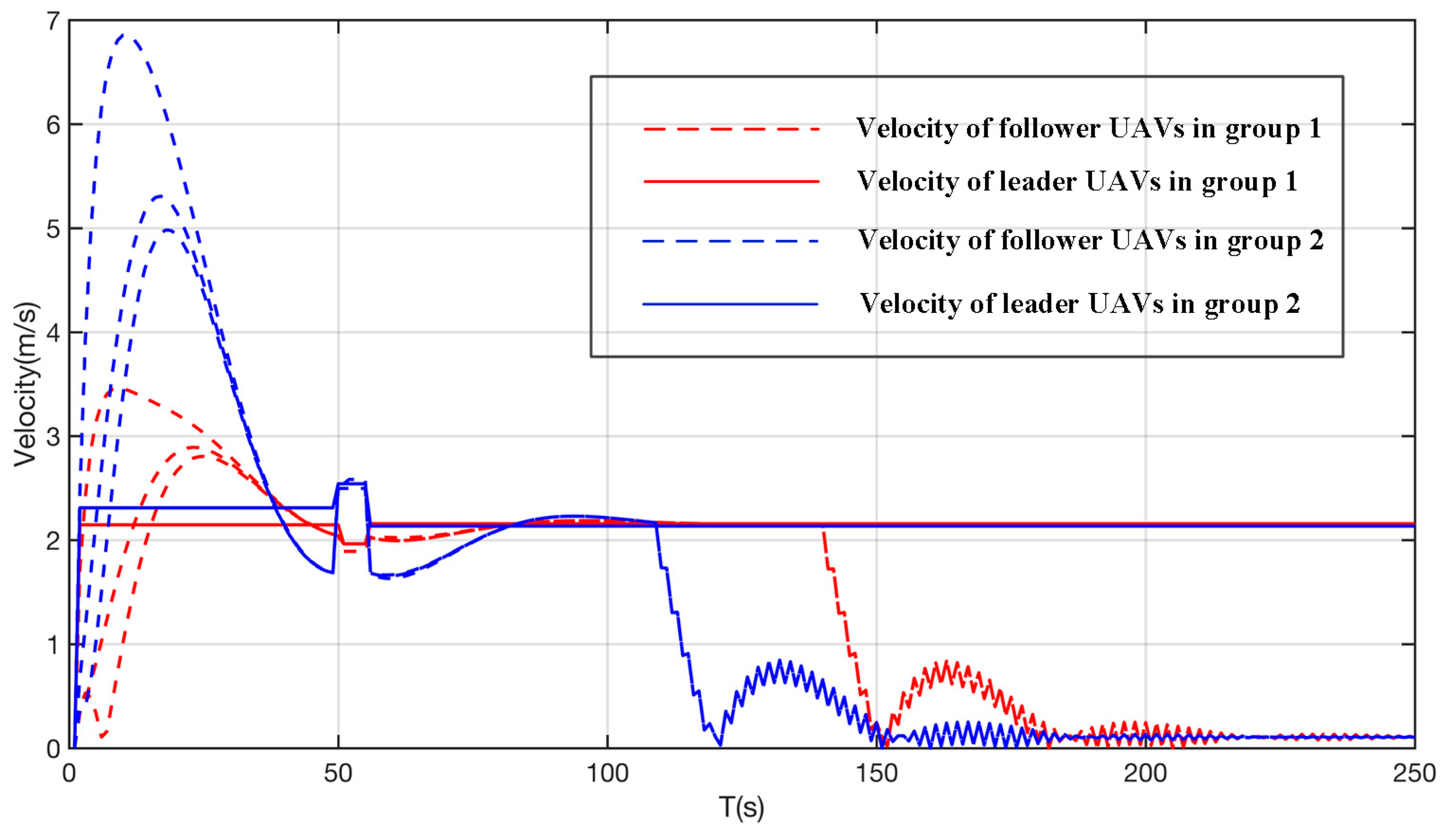
4.2. Dynamic Obstacle Scene
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fax, J.A.; Murray, R.M. Information flow and cooperative control of vehicle formations. IEEE Trans. Autom. Control. 2003, 49, 1465–1476. [Google Scholar] [CrossRef]
- Jadbabaie, A.; Lin, J.; Morse, A.S. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans. Autom. Control. 2003, 48, 998–1001. [Google Scholar]
- Lawton, J.; Beard, R.; Young, B. A decentralized approach to formation maneuvers. IEEE Trans. Robot. Autom. 2003, 19, 933–941. [Google Scholar] [CrossRef]
- Leonard, N.E.; Ogren, P. Obstacle avoidance in formation. IEE Icra 2003, 2, 2492–2497. [Google Scholar]
- Tang, J.; Piera, M.A.; Guasch, T. Coloured Petri net-based traffic collision avoidance system encounter model for the analysis of potential induced collision. Transp. Res. Part. C: Emerg. Technol. 2016, 67, 357–377. [Google Scholar] [CrossRef]
- Tang, J.; Zhu, F.; Piera, M.A. A causal encounter model of traffic collision avoidance system operations for safety assessment and advisory optimization in high-density airspace. Transp. Res. Part. C: Emerg. Technol. 2018, 96, 347–365. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and cooperation in networked multi-agent systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef]
- Chen, Y.Q.; Wang, Z. Formation control: A review and a new consideration. Intelligent Robots and Systems. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005. [Google Scholar]
- Cao, Y.; Yu, W.; Ren, W.; Chen, G. An overview of recent progress in the study of distributed multi- agent coordination. IEEE Trans. Ind. Inform. 2013, 9, 427–438. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R. Consensus seeking in multi-agent systems using dynamically changing interaction topologies. IEEE Trans. Autom. Control. 2005, 50, 655–661. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R. Consensus of information under dynamically changing interaction topologies. In Proceedings of the American Control Conference, Boston, MA, USA, 30 June–2 July 2004; pp. 4939–4944. [Google Scholar]
- Olfati-Saber, R.; Murray, R. Agreement problems in networks with directed graphs and switching topology. In Proceedings of the IEEE Conference on Decision and Control, Maui, HI, USA, 9–12 December 2003; pp. 4126–4132. [Google Scholar]
- Olfati-Saber, R.; Murray, R. Consensus protocols for networks of dynamic agents. In Proceedings of the American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 951–956. [Google Scholar]
- Jun, T.; Yang, W. A causal model for safety assessment purposes in opening the low-altitude urban airspace of chinese pilot cities. J. Adv. Transp. 2018, 2018, 1–18. [Google Scholar]
- Luongo, S.; Corraro, F.; Ciniglio, U.; Di Vito, V.; Moccia, A. A novel 3d analytical algorithm for autonomous collision avoidance considering cylindrical safety bubble. In Proceedings of the 2010 IEEE Aerospace Conference, Big Sky, MT, USA, 6–13 March 2010; pp. 1–13. [Google Scholar]
- Park, J.W.; Oh, H.D.; Tahk, M.J. Uav collision avoidance based on geometric approach. In Proceedings of the 2008 SICE Annual Conference, Tokyo, Japan, 20–22 August 2008. [Google Scholar]
- Chakravarthy, A.; Ghose, D. Obstacle avoidance in a dynamic environment: A collision cone approach. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 1998, 28, 562–574. [Google Scholar] [CrossRef]
- Carbone, C.; Ciniglio, U.; Corraro, F.; Luongo, S. A novel 3d geometric algorithm for aircraft autonomous collision avoidance. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 1580–1585. [Google Scholar]
- Fasano, G.; Accardo, D.; Moccia, A.; Luongo, S.; Di Vito, V. In-flight performance analysis of a non-cooperative radar-based sense and avoid system. J. Proc. Inst. Mech. Eng. Part. G J. Aerosp. Eng. 2016, 230, 1592–1604. [Google Scholar] [CrossRef]
- Orefice, M.; Vito, V.D.; Torrano, G. Sense and avoid: Systems and methods. In Encyclopedia of Aerospace Engineering; Wiley: New York, NY, USA, 2015. [Google Scholar]
- Sigurd, K.; How, J. Uav trajectory design using total field collision avoidance. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Austin, TX, USA, 11–13 August 2003; p. 5728. [Google Scholar]
- Liu, J.Y.; Guo, Z.Q.; Liu, S.Y. The simulation of the uav collision avoidance based on the artificial potential field method. Adv. Mater. Res. 2012, 591, 1400–1404. [Google Scholar] [CrossRef]
- Ruchti, J.; Senkbeil, R.; Carroll, J.; Dickinson, J.; Holt, J.; Biaz, S. Unmanned aerial system collision avoidance using artificial potential fields. J. Aerosp. Inf. Syst. 2014, 11, 140–144. [Google Scholar] [CrossRef]
- Yoshiaki, K. Real-Time Trajectory Design for Unmanned Aerial Vehicles Using Receding Horizontal Control; Massachusetts Institute of Technology: Cambridge, MA, USA, 2003. [Google Scholar]
- Mavrovouniotis, M.; Yang, S.; Yao, X. Multi-colony ant algorithms for the dynamic travelling salesman problem. In Proceedings of the 2014 IEEE Symposium on Computational Intelligence in Dynamic and Uncertain Environments (CIDUE), Singapore, 16–19 April 2014; pp. 9–16. [Google Scholar]
- Kim, D.H.; Shin, S. Local path planning using a new artificial potential function composition and its analytical design guidelines. Adv. Robot. 2005, 20, 115–135. [Google Scholar] [CrossRef]
- Vascak, J. Navigation of Mobile Robots Using Potential Fields and Computational Intelligence Means. Acta Polytech. Hung. 2007, 4, 63–74. [Google Scholar]
- McIntyre, D.; Naeem, W.; Xu, X.D. Cooperative Obstacle Avoidance using Bidirectional Artificial Potential Fields. In Proceedings of the 11th UKACC Control, Belfast, UK, 31 August–2 September 2016; pp. 1–6. [Google Scholar]
- Chen, Y.B.; Luo, G.C.; Mei, Y.S.; Yu, J.Q.; Su, X.L. UAV trajectory planning using artificial potential field method updated by optimized control theory. Int. J. Syst. Sci. 2014, 45, 1407–1420. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV | Initial Position (m, m) | Initial Velocity (m/s, m/s) |
|---|---|---|
| Follower 1 | (0, 0) | (5, 0) |
| Follower 2 | (60, 5) | (0, 3) |
| Follower 3 | (30, 50) | (2, 2) |
| Leader | (20, 20) | (1, 1) |
| Group | UAV | Initial Position (m, m) | Initial Velocity (m/s, m/s) |
|---|---|---|---|
| Group 1 | Follower 1 | (0, 0) | (5, 0) |
| Follower 2 | (10, 25) | (0, 3) | |
| Follower 3 | (0, 50) | (2, 2) | |
| Leader | (20, 20) | (1, 1) | |
| Group 2 | Follower 1 | (190, 180) | (−5, −5) |
| Follower 2 | (210, 155) | (−3, −3) | |
| Follower 3 | (180, 200) | (−2, −2) | |
| Leader | (170, 170) | (−1, −1) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Y.; Tang, J.; Lao, S. UAV Group Formation Collision Avoidance Method Based on Second-Order Consensus Algorithm and Improved Artificial Potential Field. Symmetry 2019, 11, 1162. https://doi.org/10.3390/sym11091162
Huang Y, Tang J, Lao S. UAV Group Formation Collision Avoidance Method Based on Second-Order Consensus Algorithm and Improved Artificial Potential Field. Symmetry. 2019; 11(9):1162. https://doi.org/10.3390/sym11091162
Chicago/Turabian StyleHuang, Yang, Jun Tang, and Songyang Lao. 2019. "UAV Group Formation Collision Avoidance Method Based on Second-Order Consensus Algorithm and Improved Artificial Potential Field" Symmetry 11, no. 9: 1162. https://doi.org/10.3390/sym11091162
APA StyleHuang, Y., Tang, J., & Lao, S. (2019). UAV Group Formation Collision Avoidance Method Based on Second-Order Consensus Algorithm and Improved Artificial Potential Field. Symmetry, 11(9), 1162. https://doi.org/10.3390/sym11091162