Abstract
Multipath diversity significantly impacts multipath transmission quality. Enough multipath diversity would minimize the negative influence brought by an individual path, thus improving tolerance capability of network congestion and failure. However, multipath diversity is hard to guarantee on overlay networks because of inaccurate awareness of underlay network and multipath generating methods considering little about underlay diversity. In this paper, we design a multi-dimension spatial method for topology awareness and multipath generating. Analyzing that the complicated underlay networks with multiple autonomous systems reduce the accuracy of network positioning for topology awareness, we decompose the underlay networks into multiple dimensions, namely intra and inter autonomous system dimensions. We generate independent views for each autonomous system and merge views by embedding exchange points. Then, we design some spatial mechanisms to evaluate link diversity and to constrain multipath generating. Based on the multi-dimensional view, multipath generating is conducted in inter and intra autonomous system phases. Experiments demonstrate that the proposed method improves topology awareness accuracy and guarantees multipath diversity better and the transmission quality is improved.
1. Introduction
Various innovative internet applications are emerging thanks to the network infrastructures with ever growing quality, and, in turn, applications are demanding higher transmission capability to achieve better quality of experience (QoE). Although underlay networks are usually of good performance (e.g., high bandwidth, short latency), it is still challenging to guarantee end-to-end QoE, partially due to the “best-effort” layer-3 routing mechanism. According to 3GPP (3rd Generation Partnership Project), the conversational applications [1], e.g., real-time video conversation, demand not only specific end-to-end bidirectional bandwidth and delay, but also smooth procedure. The end-to-end QoE is vulnerable to link abnormality, e.g., outage and congestion, which happen randomly in underlay networks and are difficult to overcome using the single path transmission mode [2]. Therefore, the multipath transmission methodology has been coming up as a preventive or remedial measure to strengthen the end-to-end transmission quality.
The distinct advantage of multipath transmission is that it aggregates transmission capabilities of multiple paths. On one hand, it expands the bandwidth by concurrently exploiting redundant links. On the other hand, it weakens the negative influence on the end-to-end transmission brought by link abnormality from a certain path. We mainly attribute this advantage to the uncorrelation of multiple paths, and name it multipath diversity. From the perspective of which part of networks multipath transmission enhances, we classify the studies of multipath transmission into two categories, namely, (i) on the end-host side, (ii) operating the intermediate network, and (i) some improved studies of multipath transmission control protocol (MPTCP) represent the enhancement on the end part [3], due to the fact that it focuses on optimizing the end flow control and schedule by using paths provided by multi-homed hosts. Actually, the multi-homed scenario is not common for most end devices. (ii) In [2], multipath diversity is improved in the intermediate networks on the internet protocol (IP) layer, while some modification has to be imposed on network infrastructures, e.g., router. Alternatively, overlay relays are adopted to redirect network traffic to multiple overlay paths as in [4,5,6,7,8]. In this paper, we mainly consider relevant two issues of generating multiple relay-based paths on overlay networks, namely (1) the topology match between overlay and underlay networks, and (2) generating multiple paths with high path diversity.
(1) The topology match between overlay and underlay networks is a classical and still challenging issue for designing network architectures and deploying applications on overlay networks due to the characteristics of traditional TCP/IP protocol stacks. The mismatch problem is likely to result in transmission degradation for end users and low link utilization for bearing networks. We have analyzed the potentially serious consequences of topology mismatch for transmission in [9] including unacceptable large transmission delay and useless redirected network traffic. An efficient and widely studied methodology to solve the mismatch problem is topology awareness and a representative method to improve topology awareness for overlay networks is network positioning [10,11,12]. Based on the measure results, the overlay nodes are positioned with network coordinates in a coordinate system. While we discover that the underlay networks are complicated thanks to the abundant deployments of bearing networks from multiple Internet Service Providers (ISPs), the complicated bearing networks have some features of a complex network, and a main feature is that the networks devices are deployed in a cascade manner [13,14]. For example, there exist various autonomous systems (AS) and they might cover overlapping geographic areas and be interconnected in several locations. The complicated bearing networks would lead to positioning inaccuracy, mainly due to the fact that the reference nodes for overlay nodes in different autonomous systems would cause delay deviation when overlay nodes in different autonomous systems are positioned together. Therefore, in this paper, in order to reduce topology match deviation and improve positioning accuracy, we try to simplify the complicated bearing networks and decompose the bearing network into multi-dimensions, namely horizontal dimension for intra-AS and vertical dimension for inter-AS. Firstly, we independently generate the coordinate-based topology view for overlay nodes in each autonomous system, i.e., the horizontal dimension. Then, we merge these views into a universal view by embedding exchange exports between autonomous systems, i.e., the vertical dimension.
(2) Multipath diversity impacts the multipath transmission quality when capabilities of multiple concurrent paths with little correlation are aggregated. High multipath diversity helps improve the concurrent utilization of network links and minimizes the negative influence brought by an individual path, so that tolerance capability of network congestion and failure are improved [3,15,16]. In practice, it is more challenging to guarantee enough multipath diversity on overlay networks than in underlay bearing networks, mainly due to that there exists a little mechanism for overlay nodes in traditional networks to become aware of the precise underlay network topology. In this paper, we take advantages of abundant links existing in the complicated bearing networks and propose a multipath generating method. The motivation is as follows: In real-world underlay networks, various Internet Service Providers (ISPs) have deployed their own infrastructures of different scopes, so that there might exist redundant links between a pair of origin-destination hosts. An ideally typical scenario is that two paths between an origin–destination pair separately traverse two different service providers. Thus, based on the existing underlay link diversity, we hold the opinion that links through different service providers are more likely to be independent, and multiple paths consisting of independent links would gain high multipath diversity. On the basis of the multi-dimension topology match view in (1) above, we also design the multipath generating method from two dimensions, namely inter-AS (among autonomous systems) and intra-AS (among relay nodes in an autonomous system). Firstly, we use autonomous systems as the basic unit and try to redirect traffic to paths belonging to totally different autonomous systems; this is named inter-AS. While practically this ideal scenario is not always feasible, due to the fact that some geographic areas are not covered by multiple autonomous systems, in some areas, paths have to pass through the same autonomous systems. Then, we have to minimize (maximize) the multipath correlation (multipath diversity) in one autonomous system. We design some spatial mechanisms to improve multipath diversity, e.g., we use the cosine similarity (“Deviation Angle”) to evaluate link correlation, and use “Transmission Surface” to constrain available nodes.
After analyzing the above issues, we make the following contributions in this paper:
(1) In order to improve network positioning accuracy for topology awareness, we decompose the bearing networks into a multi-dimension structure, namely intra-AS and inter-AS dimensions and design the multi-dimension topology view.
(2) We design some spatial mechanisms to evaluate the correlation of first-hop links , and to constrain multipath generating.
(3) We design an inter-AS and intra-AS multipath generating method to improve multipath diversity by taking advantages of underlay diversity.
(4) We evaluate the multi-dimension spatial method on the OMNet++ simulation platform considering topologies generated with BRITE and brought from practical real-world networks.
The remaining parts of this paper are arranged as follows. In Section 2, we describe the background and state the problems. A multi-dimensional structure is designed to improve the accuracy of network positioning and topology awareness in Section 3. Section 4 introduces the multi-dimension spatial method of multipath generating. The performance of the proposed method evaluated in Section 5. Section 6 introduces related work and Section 7 concludes this paper.
2. Background and Problem Statement
2.1. Multipath Transmission on Overlay Networks and SDSON
Multipath transmission on overlay networks has the advantages of flexible and efficient development and deployment in bearing networks compared with other multipath implementations on other network layers, partially thanks to its no modification on network devices in bearing networks and efficient redirection on network traffic. We achieve multipath transmission on application-layer overlay networks based on relaying network traffic. We deploy application-layer relay nodes in bearing networks to redirect networks traffic into multiple concurrent end-to-end paths. In order to achieve optimal and intelligent control and management on relay nodes, we use the software-defined networking (SDN) paradigm to orchestrate relay nodes and conduct forwarding control and we name the SDN-based multipath transmission framework Software-Defined Service Overlay Network (SDSON) [17,18,19,20].
The structure of SDSON is shown in Figure 1, which is built on the application-layer overlay networks. The bottom plane is the bearing network layer, consisting of network forwarding devices; this underlay network provides the basic transmission for overlay networks. The middle plane is the forwarding plane of SDSON, and there exist two network entities of SDSON, namely Relay Server (RS) and User Agent (UA); RS works as the forwarding nodes, i.e., the relay nodes that providing relayed forwarding services, and UA provides the end host with the access to SDSON. The top plane is the control plane of SDSON, where Relay Controller (RC) conducts global control and management functions. A scenario of end-to-end multipath transmission is shown in Figure 1, and three multiple paths are generated on forwarding plane, and corresponding paths in underlay networks. Like other multipath transmission solutions on application-layer overlay networks, in SDSON, there exist two challenging problems to solve, namely, (i) the topology match between overlay networks and underlay networks, and (ii) the enhancement on multipath transmission performance.
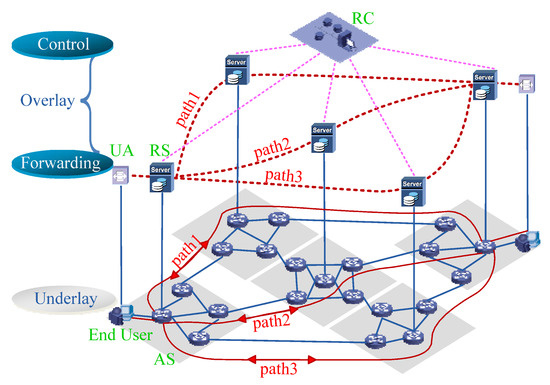
Figure 1.
The framework of Software-Defined Service Overlay Network (SDSON) built on bearing networks. The bottom plane consists of underlay bearing networks. The middle plane is the forwarding plane, which consists of Relay Servers (relay forwarding nodes). The top plane is the control plane, which consists of Relay Controller (control node).
2.2. Topology Awareness
Topology awareness helps improve the topology match performance between overlay networks and bearing networks, and an effective topology awareness methodology is network positioning. However, due to the complexity of existing bearing networks, the accuracy of network positioning is significantly impacted, thus the accuracy of topology awareness is degraded. We use an example to discuss the potential accuracy degradation. In order to simplify the network scenario, we use autonomous systems to represent the bearing networks. A simple but representative bearing network is depicted in Figure 2. For simplicity, the underlay devices are not revealed, and overlay nodes are deployed in AS1 and AS2, which have an exchange point (Er) in geographic location L1.
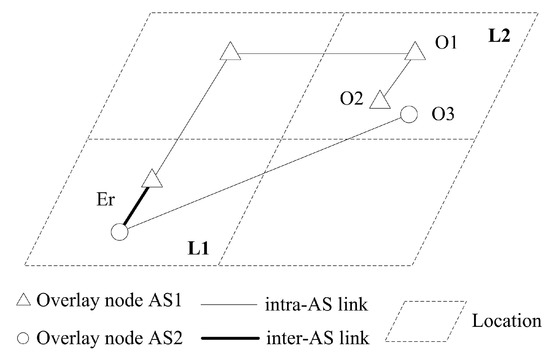
Figure 2.
The accuracy degradation in existing bearing networks due to the topology complexity.
We use the following example to discuss the positioning inaccuracy. Two overlay nodes (O1 and O2) are deployed in AS1 and one node (O3) in AS2. Overlay nodes O1, O2 and O3 are all in location L2, and the delays between three overlay nodes and Er are D(O1,Er), D(O2,Er) and D(O3,Er). Due to the fact that the packet transmitted from O3 to O1 has to pass through Er, the delay between O3 and O1 is estimated as D(O3,O1)=D(O3,Er)+D(O1,Er). The delay between O2 and O1 is small because they are in the same autonomous systems and close. Thus, the delay between O2 and O1 is far less than that between O3 and O1, that is, D(O2,O1)«D(O3,O1). However, when O1 is chosen as the reference node in a network positioning method, the position of O2 would be close to O1 while O3 is distant from O1. Then, the delay deviation between O2 and O3 comes up. Actually, they are in the same location and they should be close. The above delay deviation severely impacts the accuracy of topology awareness when network positioning methods are adopted.
2.3. Multipath Diversity
Multipath diversity means the transmission differences of multiple paths, and higher multipath diversity indicates that there exist fewer joint nodes or links in underlay networks between paths. Multipath diversity is an important issue that significantly influences the performance of multipath transmission—for instance, paths obtaining high multipath diversity could efficiently aggregate different resources of multiple paths, and one individual path would bring less impact to overall paths when multipath diversity is higher. Multipath diversity is determined by many factors in bearing networks and we should explore and exploit the diversity of transmission resources in existing underlay bearing networks and enhance multipath diversity.
2.3.1. Diversity of Underlay Network
Generally, end-to-end packets are forwarded via one or a set of autonomous systems. i.e., packets may pass via border devices, named exchange points, between autonomous systems. We decompose underlay networks in two dimensions—intra-AS and inter-AS—as shown in Figure 3a; vertical layers signify three autonomous systems, and in each layer locate forwarding nodes (solid circles) and dotted rectangle boxes denote six geographic locations. The aggregated networks are depicted in Figure 3b and the integrated topology in Figure 3c. We discuss end-to-end multipath transmission between hosts C1, C2 and C3. For C1 and C2, there exist two types of end-to-end multiple paths, i.e., completely intra-AS paths in AS1, and inter-AS paths via AS2 or AS3. For C1 and C3, only the second type exists. Notations are listed in Table 1.
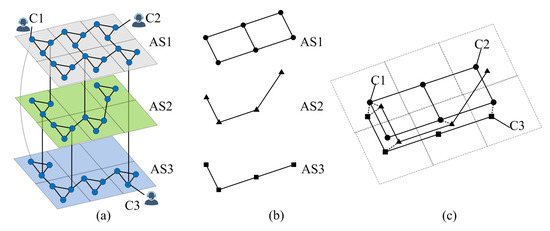
Figure 3.
The underlay bearing networks consisting of multiple autonomous systems in different locations. (a) shows the underlay networks with three different autonomous systems (represented by three layers), and in each autonomous systems, forwarding nodes are deployed in several locations (represented by dotted rectangles); (b) shows the independent topology view of each autonomous systems and (c) shows the merged topology view of three independent views.

Table 1.
Notations and Definitions in Underlay Diversity.
2.3.2. Enhancing Multipath Diversity
Our objective is to discover MP(i,j) to guarantee MPD(i,j) as high as possible, i.e., MP(i,j) = argmax MPD(i,j). For simplicity, we combine two paths within the two types mentioned above, and there exist three combinations, (i) intra-AS with intra-AS, (ii) intra-AS with inter-AS, and (iii) inter-AS with inter-AS.
(i) Suppose , , IF , and are disjoint, ELSE, intra-AS geometric multipath diversity is involved.
(ii) Suppose , (P2 via two autonomous systems), IF and , and are disjoint, then we select a proper exchange point between and , ELSE, intra-AS geometric multipath diversity is involved.
(iii) Suppose , , (P1 and P2 both via two autonomous systems), IF , and , , and are disjoint; then, we select the SPs between and , and , ELSE, intra-AS geometric multipath diversity is involved.
3. Constructing Multi-Dimensional Topology View
3.1. Constructing Independent Views
We prefer to use centralized network positioning methods [21] to generate coordinates for RSes in SDSON, e.g., Vivaldi [22], MDS [21,23] and GNP [24]. We obtain required inputs by measuring [18]. The coordinate of is . We use D(i,j), MR(i,j) and MM(i,j) as the distance, measure relation and metric between and .
3.2. Merging Topology Views
We merge independent views by relations of locations and embedding SPs. The information of SPs is hard to obtain due to privacy and security policy, so we infer SPs from MM(i,j) based on deployment characteristics, e.g., exchange point for two autonomous systems is usually in the same location, and latency between RSes near the exchange point is relatively small. To reduce search complexity, we only search MR() between RSes in locations of specific distance. i.e., , and DT is the location distance threshold. In addition, only top h minimum MM() within each city are chosen, and LT sets the exchange point latency threshold according to empirical measure, so that exchange point would exist if . The embedding procedure is shown in Algorithm 1.
| Algorithm 1 Embedding exchange points |
| Input: MM(N,N), N is the number of RSes , W is the number of autonomous systems DT, LT Output: , M is the number of locations (cities) , P,Q are the numbers of neighbor RSes. C(N,N), coordinate of exchange point, center of two RSes 1: while do 2: while do 3: while do 4: MM(f,g) ≤ LT and Get top h minimum MM(f,g) 5: (k= c or d or c-d) 6: 7: end while 8: end while 9: end while |
4. Multipath Generating
Our proposition is that, if two links are more “distant”, they have higher diversity. The “distant” has two explanations: one is geographic “distant”, i.e., links via different locations have little correlation, and the other is that links in different autonomous systems are independent, although in the same location.
4.1. Spatial Multipath Diversity
We introduce some spatial mechanisms to characterize and improve multipath diversity. The relevant items and descriptions are listed in Table 2 referring to samples depicted in Figure 4a, where black circles denote coordinates of RSes. TD indicates the deterministic transmission trend so as to reduce aimless redirection and facilitate convergence. For instance, two paths 7→5→2→9 and 7→14→15→9 violate the principle of TD 7→9 because hop 5→2 reverses 7→9, and hop 7→14 diverges two much from 7→9. TS constrains intermediate nodes to reduce search complexity and is constructed between two RSes with several criteria. The TS ABCD is a rectangle symmetric about 7-9. The TS ellipse EF contains the RS whose distance sum to 7 and 9 is smaller than a specific value, e.g.,1.5×D(7,9). DA implies the direction difference of two links. Supposing that OMN is a triangle, according to the triangle geometric formula, ; then, we get . When and stay constant, impacts , i.e., within to , bigger brings bigger . We adopt this geometry feature to characterize node diversity, so that, in Figure 4a, RS2 and RS12 would be more distant with bigger and thus links 7→2 and 7→12 would be with more difference, which we seem as link diversity.
Table 2.
Geometric items and descriptions referring to Figure 4.
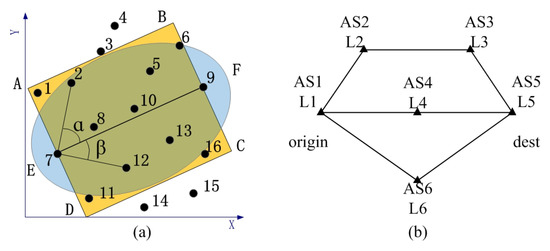
Figure 4.
Sample topologies consist of overlay nodes and different autonomous systems. (a) shows a coordinate-based view of Relay Serves and solid circles represent the coordinates of Relay Servers; (b) shows the underlay bearing networks consisting of various autonomous systems deployed in different locations (L1–L6).
4.2. Exploiting Underlay Diversity
Links from different autonomous systems are usually independent, so we try to establish multiple paths via various autonomous systems. In Figure 4b, three paths are to be established between origin and destination ARSes from AS1 and AS5. Assuming that AS4 and AS6 are different and have SPs with AS1 and AS5; then, we hope that packets are redirected into AS4 and AS6 earlier and out later, thus packets on two paths might pass less common links. Assuming also that AS2 and AS3 together could bridge AS1 and AS5, we try to find these combined autonomous systems. The multipath generating procedure of a multi-dimensional spatial method is described in Algorithm 2. When MP(i,j) contains candidate multiple paths, we use DA to evaluate the diversity of first hops and filter links with high diversity, i.e., selecting relatively bigger and , where . When MP(i,j) has less than two paths, then we use above filtering constrains on Origin(i,j) and Dest(i,j) to construct paths. When there still exist no available paths, we just select RSes that satisfy TS and DA filtering constraints.
| Algorithm 2 Generating multiple paths with MDSM |
| Input: , N is the number of autonomous systems , M is the number of locations (cities) , P is the number of RSes Output: MP(i,j), multiple paths from to Origin(i,j), Dest(i,j), candidate RSes near two ARSes 1: while do 2: while do 3: Add(Origin(i,j), d, k) 4: while do 5: while do 6: Add(Dest(i,j), w, r) 7: if then 8: Add(MP(i,j), k, r, 1) 9: else if then 10: Add(MP(i,j), k, b, r, 2) 11: end if 12: end while 13: end while 14: end while 15: end while |
5. Evaluation and Analysis
We evaluate the performance of the Multi-Dimension Spatial Method (MDSM) in SDSON on OMNeT++ simulation platform. Based on the basic bearing networks provided by INet, we implement the function modules of SDSON on the application-level overlay networks. The main network entities of SDSON are Relay Server, User Agent and Relay Controller and they are implemented as function modules on the application layers. For the purpose of extensively evaluating the performance of improving the accuracy of topology awareness and enhancing PD using MDSM in SDSON, we build the underlay bearing network with two approaches: (i) the underlay bearing networks are generated using topology tool BRITE [25] and (ii) we bring the backbone networks of the practically deployed bearing networks to the simulation platform.
(i) We use BRITE to generate the underlay bearing networks with scale-free feature. While generating the bearing network topology, we use the same connection strategy on both autonomous systems and router levels, i.e., the scale-free feature for connections between routers and the relations between autonomous systems comply with the scale-free feature. The scale-free underlay network is shown in Figure 5. The rectangle nodes represent the routers, and the nodes with the same colour are routers in the same autonomous systems. Relay Servers access the bearing networks by connecting to the routers in bearing networks. For simplicity, the topology of underlay bearing networks could approximately represent the overlay network.
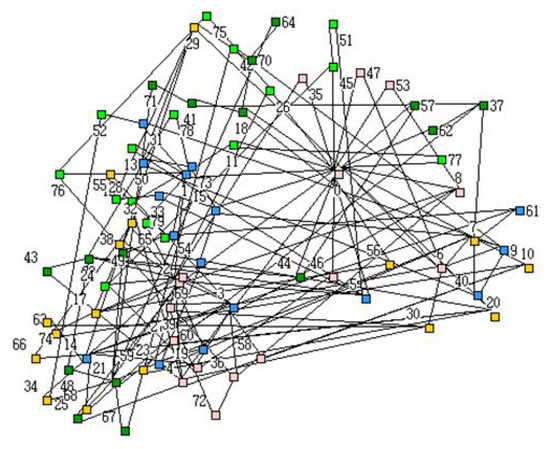
Figure 5.
The network topology of the scale-free topology feature generated with BRITE. Nodes with different colours mean they belong to different autonomous systems.
(ii) We bring backbone topologies of bearing networks from three Internet Service Providers in China, namely, ChinaNet, CMNet, and UNINet and to OMNet++, and the router nodes and connections are referring to their practical deployments. The backbone topology of underlay bearing networks from the one provided is depicted in Figure 6a. The combination of two backbone topologies are depicted in Figure 6b. The exchange points of different backbone topology are connected with bold links. Relay Servers are connected to access routers.
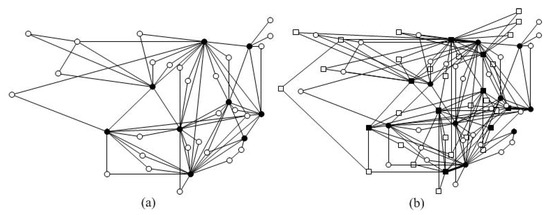
Figure 6.
The backbone topology of practically deployed bearing networks from ChinaNet, CMNet. (a) shows the topology of one underlay network and circles represent the backbone routers; (b) shows the integrated topology of underlay networks belonging to ChinaNet and CMNet; the bold lines are exchange points between them.
5.1. Accuracy of Topology Awareness
To evaluate the accuracy of topology awareness, we compare MDSM with the other three positioning methods, namely MDS-MAP [21,23], Vivaldi [22] and GNP [24]. In MDSM, we only use MDS-MAP to generate the independent view for each autonomous system. These methods are conducted on different networks depicted in Figure 5. Then, we compare the relative errors among these positioning methods. In MDSM, the relative error is the average error of all independent views. Referring to [26], we use the relative error to indicate the accuracy and it is defined as Relative Error = where denotes the practical delay between the ith and jth nodes, and denotes the estimated delay calculated from their coordinates of the ith and jth nodes. The relative errors of these methods are shown in Table 3. We observe that the relative error of MDSM is the smallest and the accuracy of topology awareness is improved.
Table 3.
Positioning methods.
5.2. Diversity of Multipath Generating
In this section, we evaluate the performance of MDSM in improving multipath diversity and we define the Multipath Stretch to evaluate the diversity among multiple paths. Multipath Stretch could indicate the correlation between paths by reflecting the joint ratio of nodes between multiple paths. The definition of Multipath Stretch of k paths is shown as follows: Multipath Stretch = where denotes the quantity of joint router nodes between the mth and nth paths, respectively. and denote the quantity of router nodes on the mth and nth paths. Multipath Stretch indicates that, when the correlation between multiple paths is higher, i.e., they have larger ratio of joint nodes, then Multipath Stretch becomes higher, and it indicates lower multipath diversity. In order to obtain statistics of packets on the router-level, the router in OMNeT++ platform is modified with a module to parse packets so that packets on multiple paths could be traced.
The evaluation scenario is set as, the video stream would be delivered between origin-destination end hosts using a real-time protocol. In order to get extensive evaluation results, 200 pairs of origin–destination end hosts are selected, and using the statistics of traced packets we calculate the Multipath Stretch. We compare Multipath Stretch among the proposed MDSM and other multipath transmission methods. In the work of [16], DR-MP generates multiple paths by deflecting packets from the shortest path. In the work of [15], GA and KSP-MP generates multiple overlay paths with by combining genetic and k-shortest algorithm. In the work of [7], GMS-MP selects the multihomed paths group that has the least correlation. In MDSM, we set the Deviation Angles with two values, and .
We calculate the CDF (cumulative distribution function) of Multipath Stretch for different multipath generating methods. The CDF is shown in Figure 7 and it could be observed that the ratio of relatively lower Multipath Stretch of MDSM with Deviation Angle is larger than other methods; this means that MDSM could obtain higher multipath diversity. This is because MDSM directly uses some objective factors of underlay networks to characterize multipath diversity; in contrast with other methods, they adopt some indirectly inferring approaches. For instance, DR-MP uses deflection that could not directly discover end-to-end disjoint paths, GA and KSP-MP might discover path sharing links, and GMS-MP indirectly infers the correlation using packet transmission features and could not probe path diversity when the features do not appear.
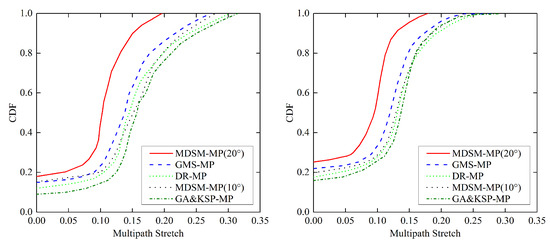
Figure 7.
The CDF (cumulative distribution function) of multipath stretch calculated from different multipath generating methods. (a) shows the CDF of multipath stretch in bearing networks generated with BRITE with scale-free feature in Figure 5; (b) shows the CDF of multipath stretch in practically deployed bearing networks from Internet Service Providers in Figure 6.
5.3. Performance of Multipath Transmission
In this section, we use the performance of multipath transmission to indirectly evaluate MDSM in improving multipath diversity. High multipath diversity helps improve the tolerance capability of multiple paths, so that multipath transmission should perform better with higher multipath diversity. The evaluation scenario adopts the bearing networks practically deployed as in Figure 6b. We still use the transmission scenario in the above Section 5.2. The quantity of end-to-end concurrent multiple paths is up to 3. We collect the sending rates for each origin end host and the variation of sending rate is depicted in Figure 8a. Background traffic with different degrees are injected into underlay bearing networks to act as the accidental occurrence of link congestion and failure. With the reference to evaluation configuration in work [27,28,29,30], the evaluation scenario is configured as the total time being 32 s, the beginning time for congestion traffic or link failure follows a Weibull distribution, the duration interval congestion traffic varies between five seconds and ten seconds following a Pareto truncated distribution, and the failure links are chosen with a Power-Law based distribution. Figure 8b depicts the total injected traffic bandwidth acting as congestion. We compare the aggregating rates of different multipath generating methods, and also consider the default single path (DSP for short). Figure 8c shows the aggregating rate and it reveals that generally multipath transmission achieves better performance than single path, especially encountering link congestion and traffic burst. This is due to the fact that multipath transmission weakens congestion or failure influence of an individual path on the overall transmission and aggregate abundant transmission resources. Furthermore, MDSM achieves better performance most of the time in comparison with others; the main reason is that it directly characterizes multipath diversity and exploits multiple paths, and higher multipath diversity brings better tolerance capability.
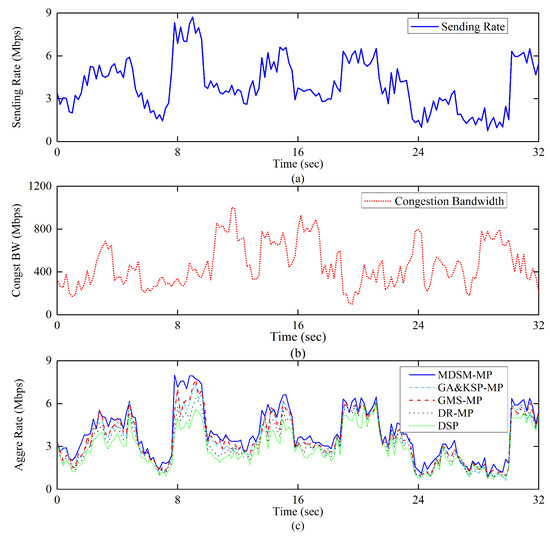
Figure 8.
Evaluation of multipath transmission performance with injected congestion traffic and link failure. (a) depicts the sending rate from origin hosts; (b) depicts the total bandwidth of traffic injected into bearing networks as congestion; (c) depicts the aggregating rates from destination host using different transmission methods.
6. Related Work
6.1. Topology Awareness
Topology awareness is an efficient methodology for topology match between overlay and underlay networks. P4P uses network coordinates to enhance forwarding with topology awareness [11]. ASAP search for the neighbor autonomous systems to obtain topology relations [31]. In [10], it is proved that coordinates would be sufficient for most applications requiring topology-awareness. Representative network positioning methods include GNP [24], Vivaldi [22] and MDS-MAP [21,23]. However, the topology-aware solutions above generate network coordinates for all nodes together in a coordinate system, and do not consider the complicated bearing networks, which actually would reduce the accuracy of positioning and topology awareness.
6.2. Multipath Diversity
Lower path correlation contributes to higher fault-tolerance capability, so that, when abnormal nodes or links occur, they would bring less impact on whole paths. High multipath diversity indicates low multipath correlation. The multipath diversity of MPTCP is likely to be improved between multi-homed hosts [3]; however, this scenario is not common. Path diversity is provided by deflecting packets to neighbors lying off the shortest-path in [16]. Multipath diversity is maximized using hybrid GA and k-shortest path algorithm in [15]. Multipath diversity is improved by avoiding shared bottlenecks between joint paths in [7]. In [32], partial sampling schemes are introduced to enhance path diversity for scaling overlay routing. In [27], natural diversity of wide-area networks is leveraged. The above solutions use feedback of probes or transmission to infer or estimate multipath diversity, whereas sometimes highly correlated paths could also exhibit uncorrelated states in appearance, but paths are tightly coupled inside. In addition, the solutions do not directly exploit the diversity among autonomous systems.
7. Conclusions
Multipath diversity significantly impacts multipath transmission quality; however, multipath diversity is difficult to guarantee on overlay networks thanks to the inaccurate topology awareness of underlay networks and the multipath generating methods considering little about underlay diversity. In this paper, we proposed a multi-dimension spatial method to improve topology awareness accuracy and multipath diversity. The topology view generated with network positioning methods was decomposed into intra and inter autonomous system dimensions. Based on the multi-dimension topology view, we designed some spatial mechanisms to generate multiple paths. Numerous simulations demonstrated that the proposed method improved topology awareness accuracy and multipath diversity.
The multi-dimensional spatial method could also be further considered in other networks that have similar features of existing bearing networks—for example, devices are deployed in the cascade manner, and the multi-dimensional organization approach could simplify the complexity.
Author Contributions
Conceptualization, Y.G., W.L., W.Z., Y.Z., H.L. and S.Z.; Data Curation, Y.G.; Formal Analysis, Y.G.; Investigation, Y.G., Y.Z., H.L. and S.Z.; Methodology, Y.G., W.L. and W.Z.; Supervision, W.L. and W.Z.; Validation, Y.G.; Writing—Original Draft Preparation, Y.G.; Writing—Review & Editing, Y.G., W.L. and W.Z..
Funding
This work was supported by the National Key Research and Development Program of China Grant No. 2018YFB1702000, the National Natural Science Foundation of China Grant No. 61671141 and the Liaoning Provincial Natural Science Foundation of China Grant No. 20180551007.
Conflicts of Interest
The authors declare no conflict of interest.
References
- 3GPP. TS 23.107 (V15) Quality of service (qos) concept and architecture. 2018. Available online: http://www.3gpp.org/DynaReport/23107.htm (accessed on 14 May 2019).
- Cidon, I.; Rom, R.; Shavitt, Y. Analysis of multi-path routing. IEEE/ACM Trans. Netw. 1999, 7, 885–896. [Google Scholar] [CrossRef]
- Han, H.; Shakkottai, S.; Hollot, C.V.; Srikant, R.; Towsley, D. Multi-path tcp: A joint congestion control and routing scheme to exploit path diversity in the internet. IEEE/ACM Trans. Netw. 2006, 14, 1260–1271. [Google Scholar] [CrossRef]
- Güven, T.; La, R.J.; Shayman, M.A.; Bhattacharjee, B. A unified framework for multipath routing for unicast and multicast traffic. IEEE/ACM Trans. Netw. 2008, 16, 1038–1051. [Google Scholar] [CrossRef]
- Jiang, J.; Das, R.; Ananthanarayanan, G.; Chou, P.A.; Padmanabhan, V.; Sekar, V.; Zhang, H. Via: Improving internet telephony call quality using predictive relay selection. In Proceedings of the 2016 ACM SIGCOMM Conference, Florianopolis, Brazil, 22–26 August 2016; pp. 286–299. [Google Scholar]
- Jones, N.M.; Paschos, G.S.; Shrader, B.; Modiano, E. An overlay architecture for throughput optimal multipath routing. IEEE/ACM Trans. Netw. 2017, 25, 2615–2628. [Google Scholar] [CrossRef]
- Liao, J.; Wang, J.; Li, T.; Zhu, X. Introducing multipath selection for concurrent multipath transfer in the future internet. Comput. Netw. 2011, 55, 1024–1035. [Google Scholar] [CrossRef]
- Wang, B.; Wei, W.; Guo, Z.; Towsley, D. Multipath live streaming via tcp:scheme, performance and benefits. ACM Trans. Multimedia Comput. Commun. Appl. 2009, 5, 25. [Google Scholar] [CrossRef]
- Guan, Y.; Lei, W.; Zhang, W.; Li, H.; Zhang, S. SGMR: A spatial geometry–based multipath routing method on overlay networks. Int. J. Commun. Syst. 2019, 32, e3894. [Google Scholar] [CrossRef]
- Pietzuch, P.; Ledlie, J.; Mitzenmacher, M.; Seltzer, M. Network-aware overlays with network coordinates. In Proceedings of the 26th IEEE International Conference on Distributed Computing Systems Workshops, Lisboa, Portugal, 4–7 July 2006; p. 12. [Google Scholar]
- Xie, H.; Yang, Y.R.; Krishnamurthy, A.; Liu, Y.G.; Silberschatz, A. P4P: Provider portal for applications. In Proceedings of the ACM SIGCOMM Computer Communication Review, Barcelona, Spain, 16–21 August 2008; pp. 351–362. [Google Scholar]
- Sun, Y.; Yang, Y.R.; Zhang, X.; Guo, Y.; Li, J.; Salamatian, K. Thash: A practical network optimization scheme for dht-based p2p applications. IEEE J. Sel. Areas Commun. 2013, 31, 379–390. [Google Scholar] [CrossRef]
- Helbing, D.; Brockmann, D.; Chadefaux, T.; Donnay, K.; Blanke, U.; Woolley-Meza, O.; Perc, M. Saving Human Lives: What Complexity Science and Information Systems can Contribute. J. Stat. Phys. 2015, 158, 735–781. [Google Scholar] [CrossRef]
- Jalili, M.; Perc, M. Information cascades in complex networks. J. Complex Netw. 2017, 5, 665–693. [Google Scholar] [CrossRef]
- Bui, V.; Zhu, W.; Bui, L.T. Optimal relay placement for maximizing path diversity in multipath overlay networks. In Proceedings of the IEEE GLOBECOM 2008–2008 IEEE Global Telecommunications Conference, New Orleans, LA, USA, 30 November–4 December 2008; pp. 1–6. [Google Scholar]
- Yang, X.; Wetherall, D. Source selectable path diversity via routing deflections. ACM SIGCOMM Comput. Commun. Rev. 2006, 36, 159–170. [Google Scholar] [CrossRef]
- Zhang, W.; Lei, W.; Liu, S.; Li, G. A general framework of multipath transport system based on application-level relay. Comput. Commun. 2014, 51, 70–80. [Google Scholar] [CrossRef]
- Guan, Y.; Lei, W.; Zhang, W.; Liu, S.; Li, H. Scalable orchestration of software defined service overlay network for multipath transmission. Comput. Netw. 2018, 137, 132–146. [Google Scholar] [CrossRef]
- Zhang, W.; Lei, W.; Guan, Y.; Li, G.; Yang, L. Considerations for application-layer multipath transport control. Int. J. Commun. Syst. 2017, 30, e3343. [Google Scholar] [CrossRef]
- Zhang, W.; Ning, Z.; Lei, W.; Chen, Z. A topology and application-aware relay path allocation scheme in multipath transport system based on application-level relay. Int. J. Commun. Syst. 2016, 30, e3245. [Google Scholar] [CrossRef]
- Shang, Y.; Ruml, W. Improved MDS-based localization. IEEE INFOCOM 2004 2004, 4, 2640–2651. [Google Scholar]
- Jesi, G.P.; Montresor, A.; Babaoglu, O. Proximity-aware superpeer overlay topologies. In IEEE International Workshop on Self-Managed Networks, Systems, and Services; Springer: Berlin/Heidelberg, Germanuy, 2006; pp. 43–57. [Google Scholar]
- Shang, Y.; Ruml, W.; Zhang, Y.; Fromherz, M.P. Localization from mere connectivity. In Proceedings of the 4th ACM international symposium on Mobile ad hoc networking computing, Annapolis, MD, USA, 1–3 June 2003; pp. 201–212. [Google Scholar]
- Ng, T.E.; Zhang, H. Predicting Internet network distance with coordinates-based approaches. In Proceedings of the Twenty-First, Annual Joint Conference of the IEEE Computer and Communications Societies, New York, NY, USA, 23–27 June 2002; pp. 170–179. [Google Scholar]
- Medina, A.; Lakhina, A.; Matta, I.; Byers, J. BRITE: An approach to universal topology generation. In Proceedings of the Ninth International Symposium on Modeling, Analysis and Simulation of Computer and Telecommunication Systems, Cincinnati, OH, USA, 15–18 August 2001; pp. 346–353. [Google Scholar]
- Costa, M.; Castro, M.; Rowstron, R.; Key, P. PIC: Practical Internet coordinates for distance estimation. In Proceedings of the 24th International Conference on Distributed Computing Systems, Tokyo, Japan, 24–26 March 2004; pp. 178–187. [Google Scholar]
- Bessani, A.; Neves, N.F.; Veríssimo, P.; Dantas, W.; Fonseca, A.; Silva, R.; Correia, M. JITeR: Just-in-time application-layer routing. Comput. Netw. 2016, 104, 122–136. [Google Scholar] [CrossRef]
- Dahlin, M.; Chandra, B.B.V.; Gao, L.; Nayate, A. End-to-end WAN service availability. IEEE/ACM Trans. Netw. 2003, 11, 300–313. [Google Scholar] [CrossRef]
- Li, Z.; Yuan, L.; Mohapatra, P.; Chuah, C.N. On the analysis of overlay failure detection and recovery. Comput. Netw. 2007, 51, 3828–3843. [Google Scholar] [CrossRef]
- Markopoulou, A.; Iannaccone, G.; Bhattacharyya, S.; Chuah, C.N.; Ganjali, Y.; Diot, C. Characterization of failures in an operational ip backbone network. IEEE/ACM Trans. Netw. 2008, 16, 749–762. [Google Scholar] [CrossRef]
- Ren, S.; Guo, L.; Zhang, X. ASAP: An AS-aware peer-relay protocol for high quality VoIP. In Proceedings of the 26th IEEE International Conference on Distributed Computing Systems, Lisboa, Portugal, 4–7 July 2006; p. 70. [Google Scholar]
- Guo, D.; Jin, H.; Chen, T.; Wu, J.; Lu, L.; Li, D.; Zhou, X. Partial probing for scaling overlay routing. IEEE Trans. Parallel Distrib. Syst. 2013, 24, 2261–2272. [Google Scholar] [CrossRef]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).