Tracking Control of a Class of Chaotic Systems


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Problem Formation
3. Main Result
3.1. The Reference Model
3.2. Control Design
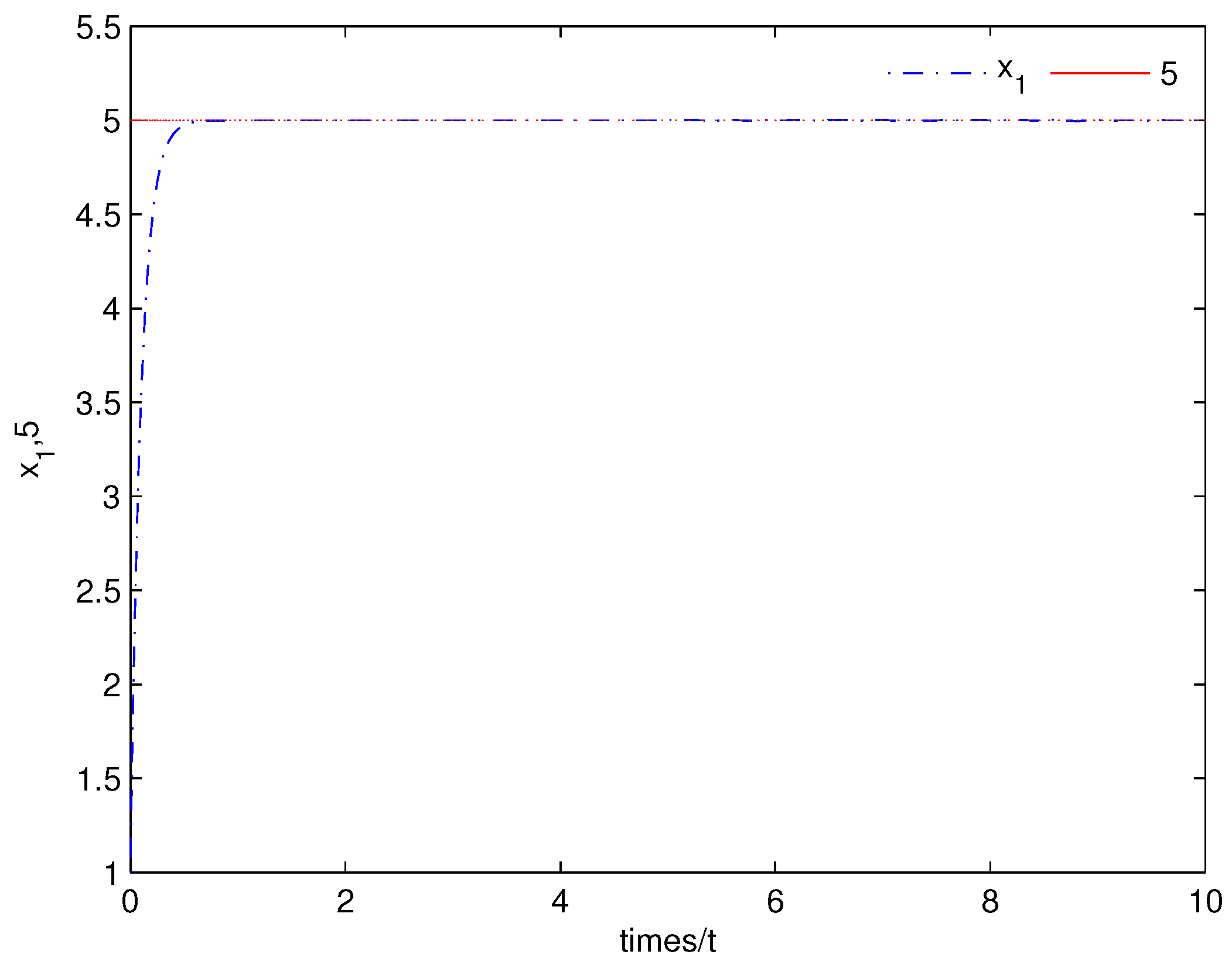
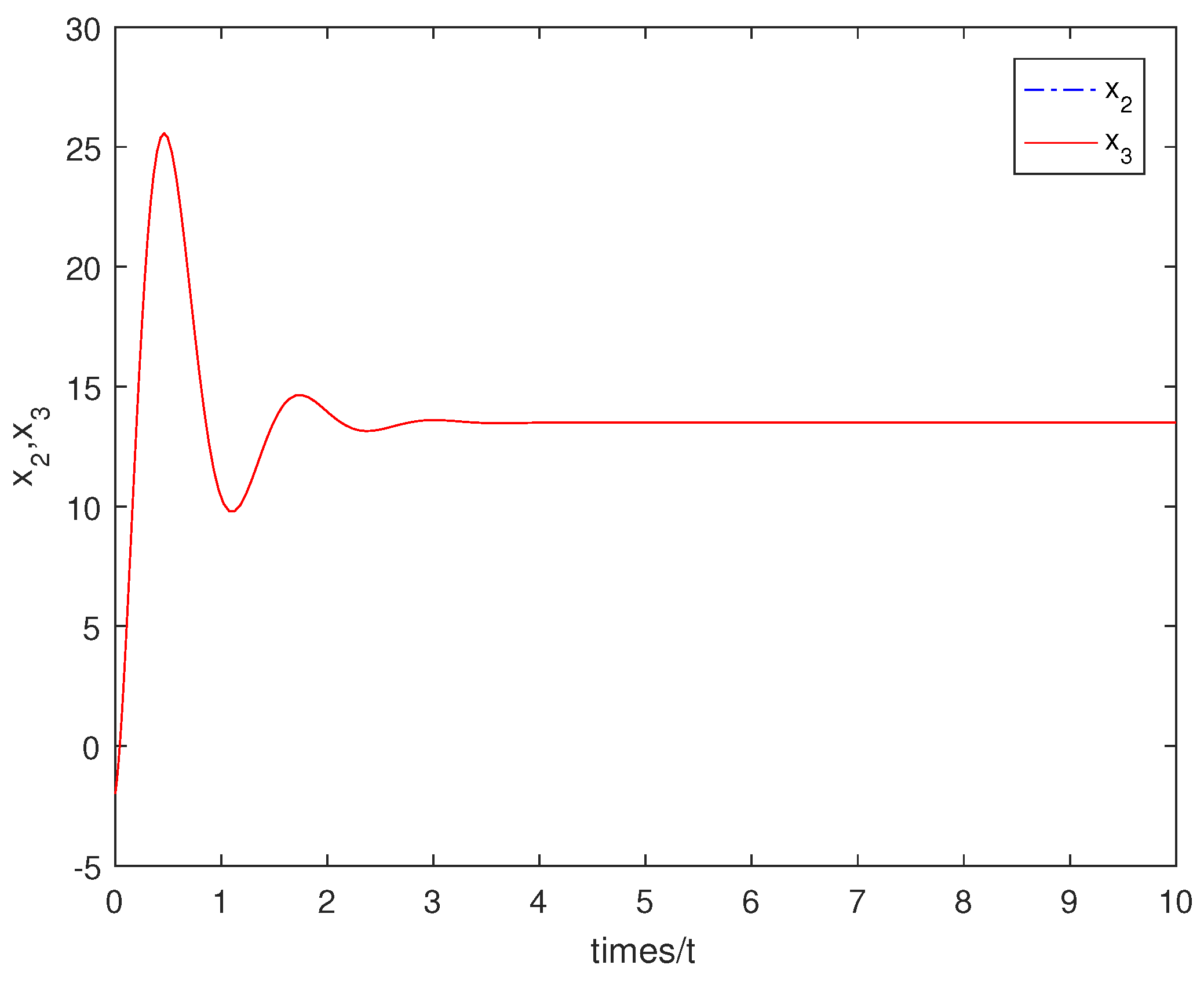
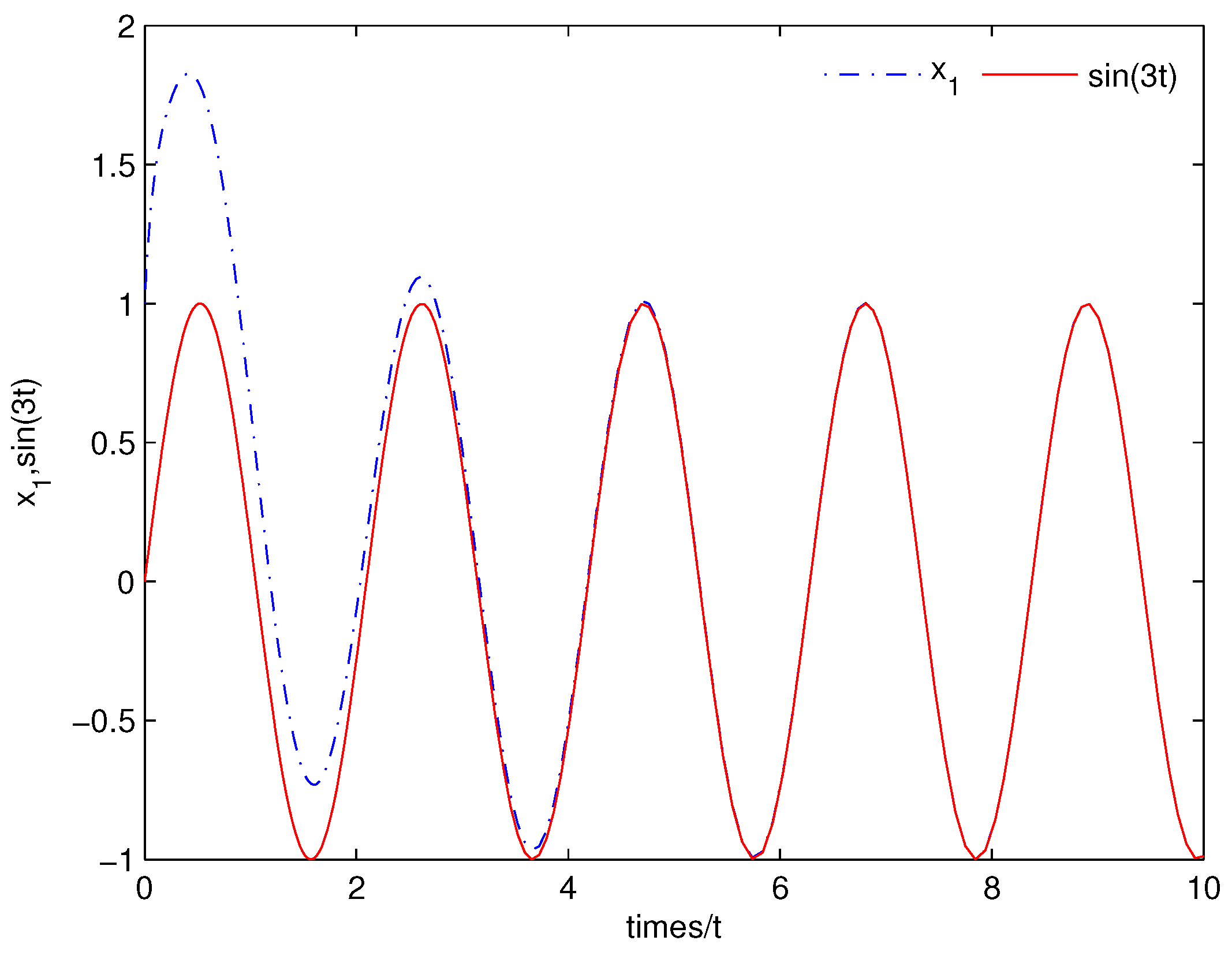
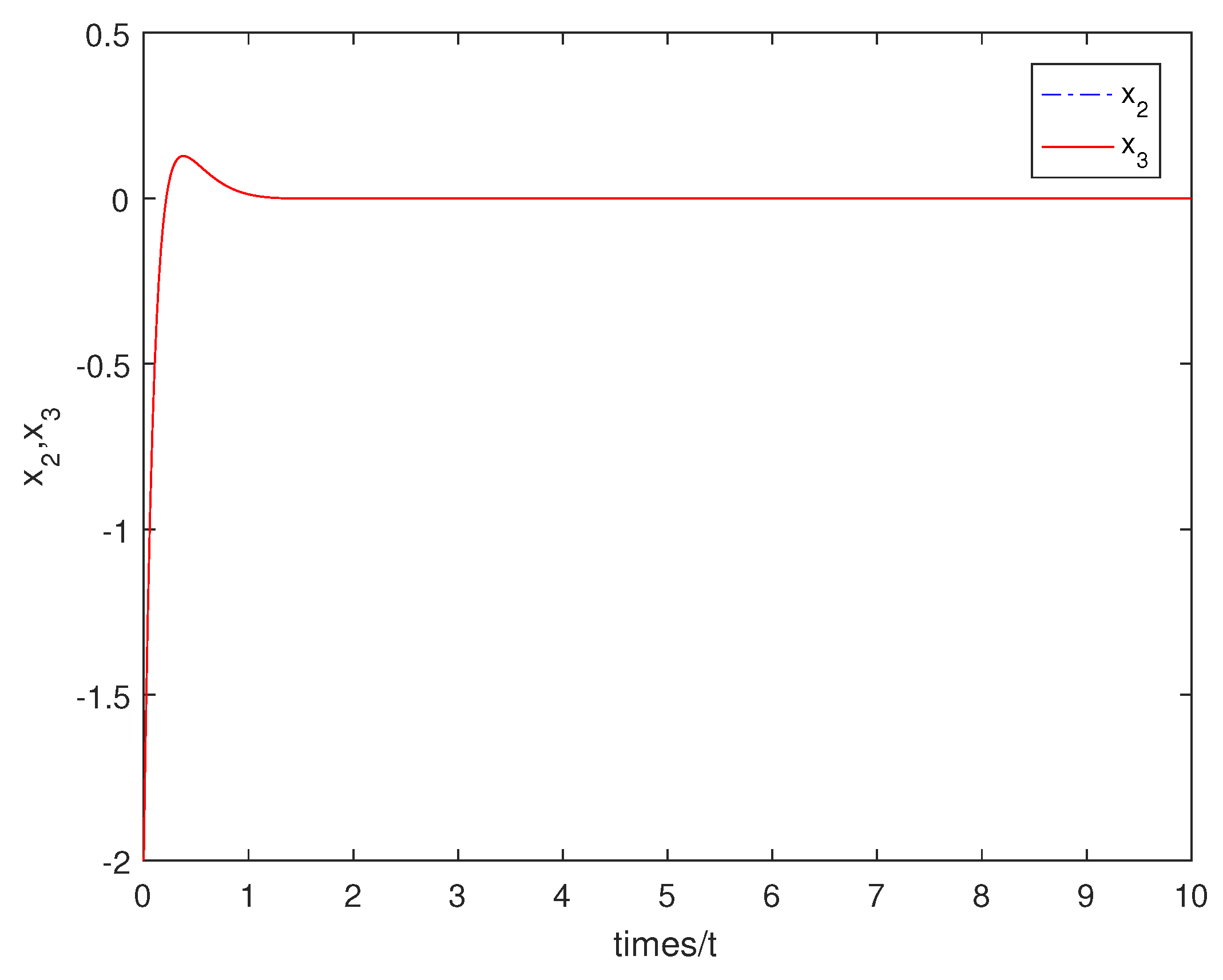
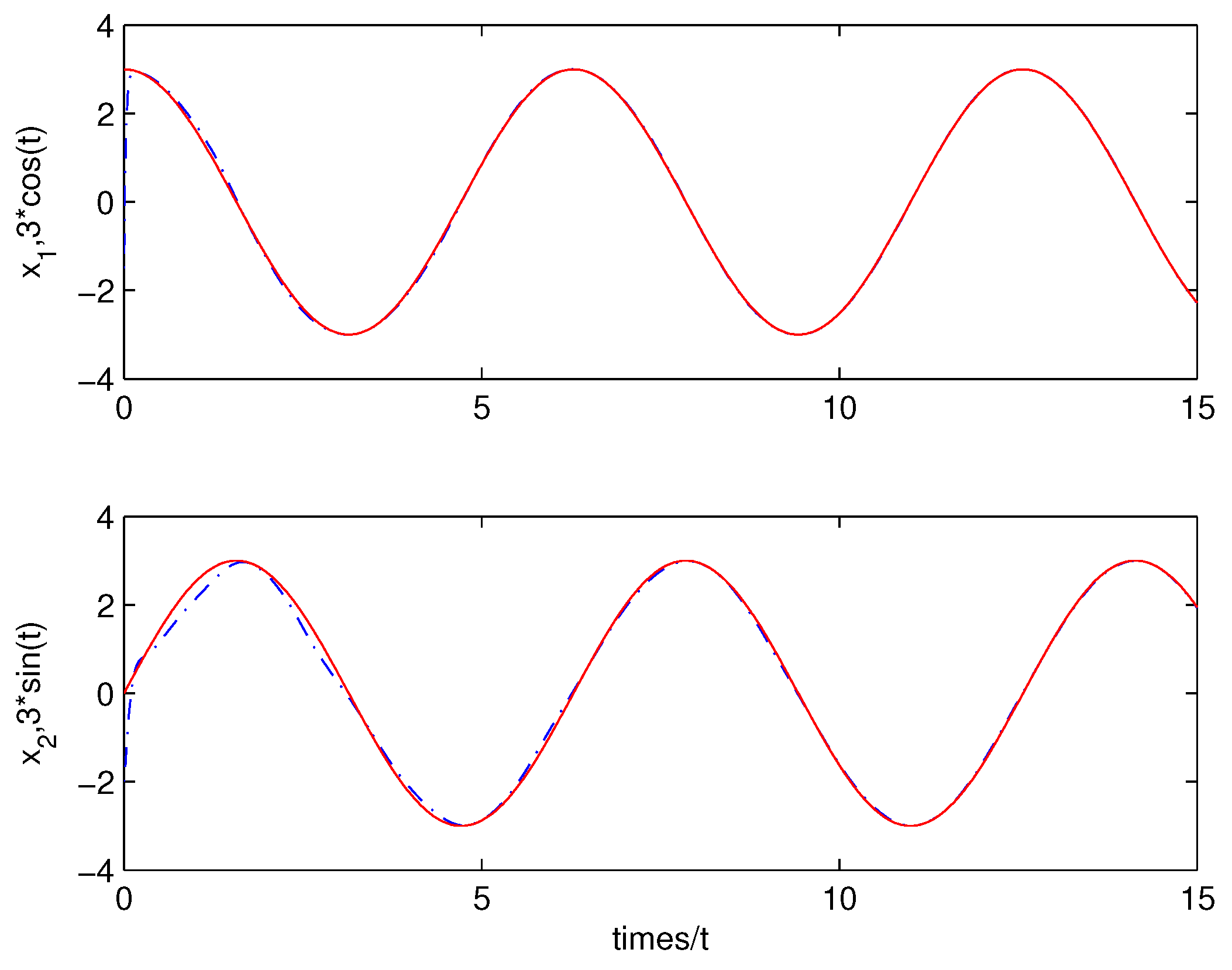
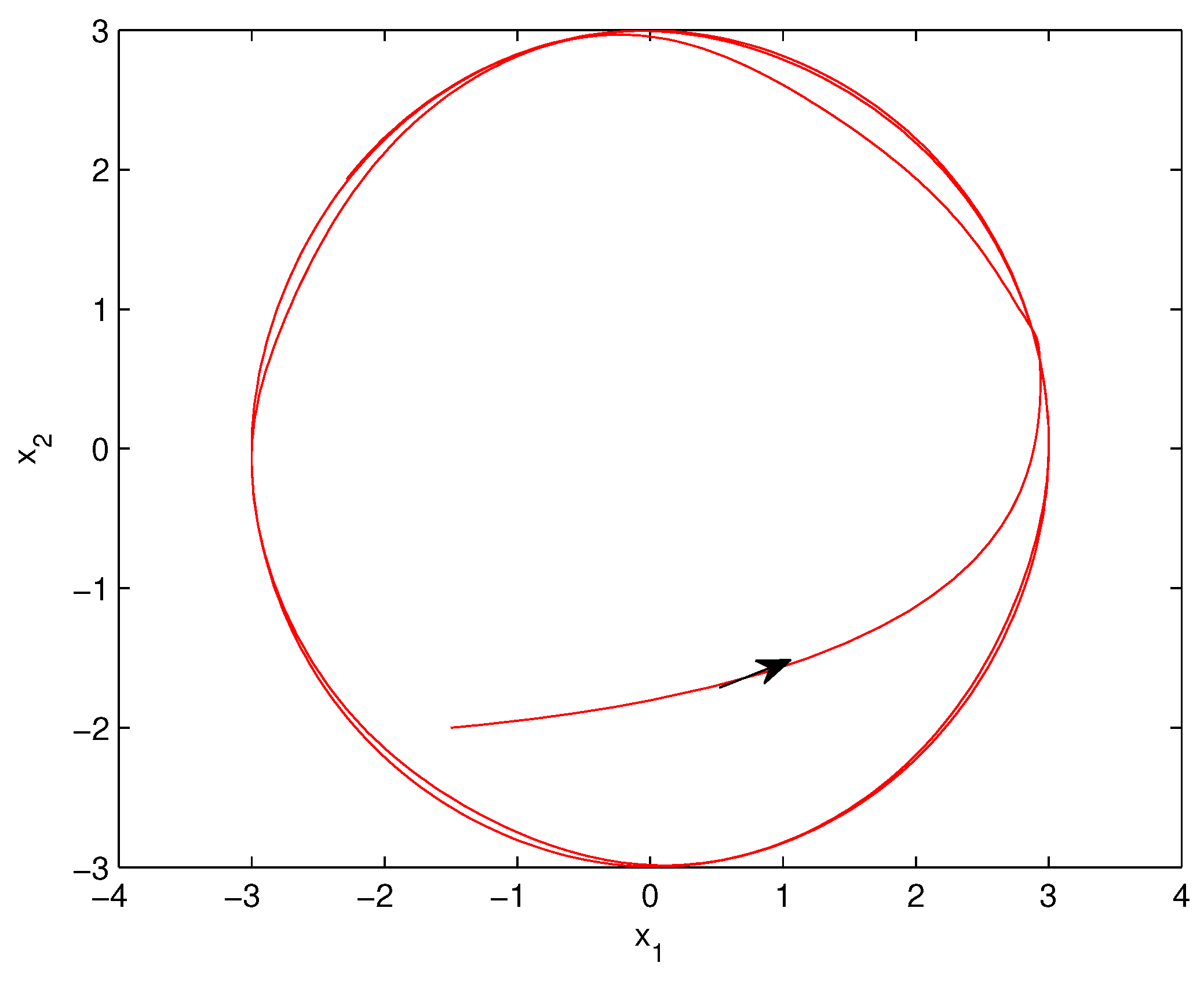
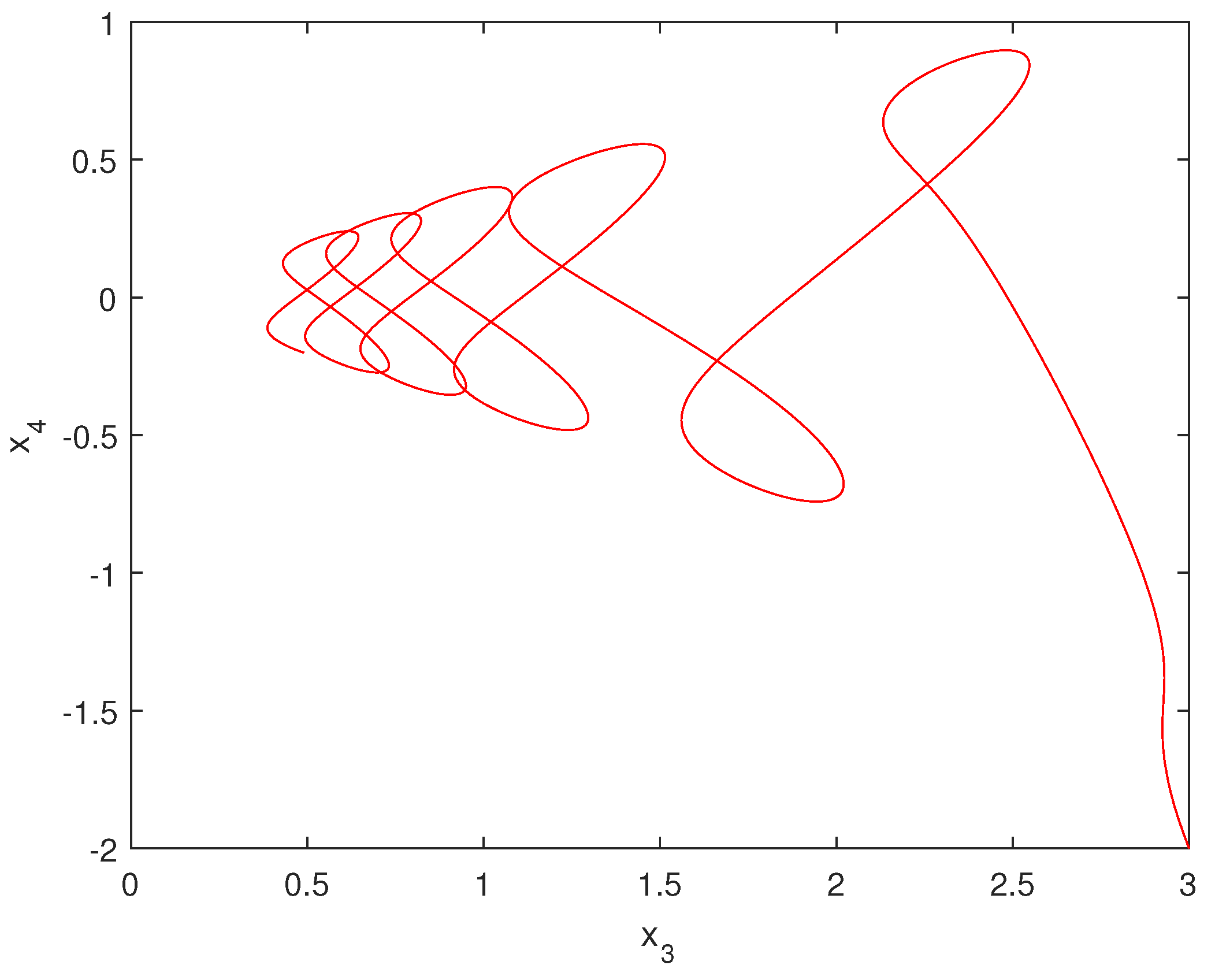
4. Numerical Examples
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ott, E.; Gerbogi, C.; Yorke, J.A. Controlling Chaos. Phys. Rev. Lett. 1990, 64, 1196–1199. [Google Scholar] [CrossRef]
- Pecora, L.; Carroll, T. Synchronization in Chaotic Systems. Phys. Rev. Lett. 1990, 64, 821–824. [Google Scholar] [CrossRef]
- Rosenblum, M.G.; Pikovsky, A.S.; Kurths, J. Phase synchronization of chaotic oscillators. Phys. Rev. Lett. 1996, 76, 1804–1807. [Google Scholar] [CrossRef] [PubMed]
- Rosenblum, M.G.; Pikovsky, A.S.; Kurths, J. From phase to lag synchronization in coupled chaotic oscillators. Phys. Rev. Lett. 1997, 78, 4193–4196. [Google Scholar] [CrossRef]
- Hu, J.; Chen, S.; Chen, L. Adaptive control for anti-synchronization of Chua’s chaotic system. Phys. Lett. A 2005, 339, 455–460. [Google Scholar] [CrossRef]
- Mainieri, R.; Rehacek, J. Projective synchronization in three-dimensional chaotic systems. Phys. Rev. Lett. 1999, 82, 3042–3045. [Google Scholar] [CrossRef]
- Ren, L.; Guo, R.W.; Vincent, U.E. Coexistence of synchronization and anti-synchronization in chaotic systems. Arch. Control Sci. 2016, 26, 69–79. [Google Scholar] [CrossRef]
- Guo, R.W. Simultaneous synchronization and anti-synchronization of two identical new 4D chaotic systems. Chin. Phys. Lett. 2011, 28, 040205. [Google Scholar] [CrossRef]
- Guo, R. A simple adaptive controller for chaos and hyperchaos synchronization. Phys. Lett. A 2008, 372, 5593–5597. [Google Scholar] [CrossRef]
- Yu, W.G. Stabilization of three-dimensional chaotic systems via single state feedback controller. Phys. Lett. A 2010, 374, 1488–1492. [Google Scholar] [CrossRef]
- Wang, Z.F.; Shi, X.R. Anti-synchronization of liu system and Lorenz system with known and unknown parameters. Nonlinear Dyn. 2009, 57, 425–430. [Google Scholar] [CrossRef]
- Al-mahbashi, G.; Md Noorani, M.S.; Bakar, S.A. Projective lag synchronization in drive-response dynamical networks with delay coupling via hybrid feedback control. Nonlinear Dyn. 2015, 82, 1569–1579. [Google Scholar] [CrossRef]
- Du, H.Y.; Shi, P. A new robust adaptive control method for modified function projective synchronization with unknown bounded parametric uncertainties and external disturbances. Nonlinear Dyn. 2016, 85, 355–363. [Google Scholar] [CrossRef]
- Liu, L.X.; Guo, R.W. Control problems of Chen-Lee system by adaptive control method. Nonlinear Dyn. 2017, 87, 503–510. [Google Scholar] [CrossRef]
- Guo, R.W. Projective synchronization of a class of chaotic systems by dynamic feedback control method. Nonlinear Dyn. 2017, 90, 53–64. [Google Scholar] [CrossRef]
- Selmic, R.R.; Lewis, F.L. Deadzone compensation in motion control systems using neural networks. IEEE Trans. Autom. Control 2000, 45, 602–613. [Google Scholar] [CrossRef]
- Selmic, R.R.; Lewis, F.L. Neural net backlash compensation with Hebbian tuning using dynamic inversion. Automatica 2001, 37, 1269–1277. [Google Scholar] [CrossRef]
- Zhou, J.; Zhang, C.; Wen, C. Robust adaptive output control of uncertain nonlinear plants with unknown backlash nonlinearity. IEEE Trans. Autom. Control 2007, 52, 503–509. [Google Scholar] [CrossRef]
- Yu, D.C.; Wu, A.G.; Yang, C.P. A novel sliding mode nonlinear proportional-integral control scheme for controlling chaos. Chin. Phys. 2005, 14, 914–921. [Google Scholar]
- Yu, D.C.; Wu, A.G.; Wang, D.Q. A simple asymptotic trajectory control of full states of a unified chaotic system. Chin. Phys. 2006, 15, 306–309. [Google Scholar]
- Bazhenov, V.A.; Pogorelova, O.S.; Postnikova, T.G. Intermittent transition to chaos in vibroimpact system. Appl. Math. Nonlinear Sci. 2018, 3, 475–486. [Google Scholar] [CrossRef]
- Lorenz, E.N. Deterministic nonperiodic flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef]
- Tam, L.M.; Si Tou, W.M. Parametric study of the fractional order Chen-Lee system. Chaos Solitons Fractals 2008, 37, 817–826. [Google Scholar] [CrossRef]
- Qi, G.Y.; Du, S.Z.; Chen, G.R.; Chen, Z.Q.; Yuan, Z.Z. On a four-dimensional chaotic system. Chaos Solitons Fractals 2005, 23, 1671–1682. [Google Scholar] [CrossRef]







© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, A.; Li, L.; Wang, Z.; Guo, R. Tracking Control of a Class of Chaotic Systems. Symmetry 2019, 11, 568. https://doi.org/10.3390/sym11040568
Yang A, Li L, Wang Z, Guo R. Tracking Control of a Class of Chaotic Systems. Symmetry. 2019; 11(4):568. https://doi.org/10.3390/sym11040568
Chicago/Turabian StyleYang, Anqing, Linshan Li, Zuoxun Wang, and Rongwei Guo. 2019. "Tracking Control of a Class of Chaotic Systems" Symmetry 11, no. 4: 568. https://doi.org/10.3390/sym11040568
APA StyleYang, A., Li, L., Wang, Z., & Guo, R. (2019). Tracking Control of a Class of Chaotic Systems. Symmetry, 11(4), 568. https://doi.org/10.3390/sym11040568