Compression of a Polar Orthotropic Wedge between Rotating Plates: Distinguished Features of the Solution



{kind=link}
Abstract
:1. Introduction
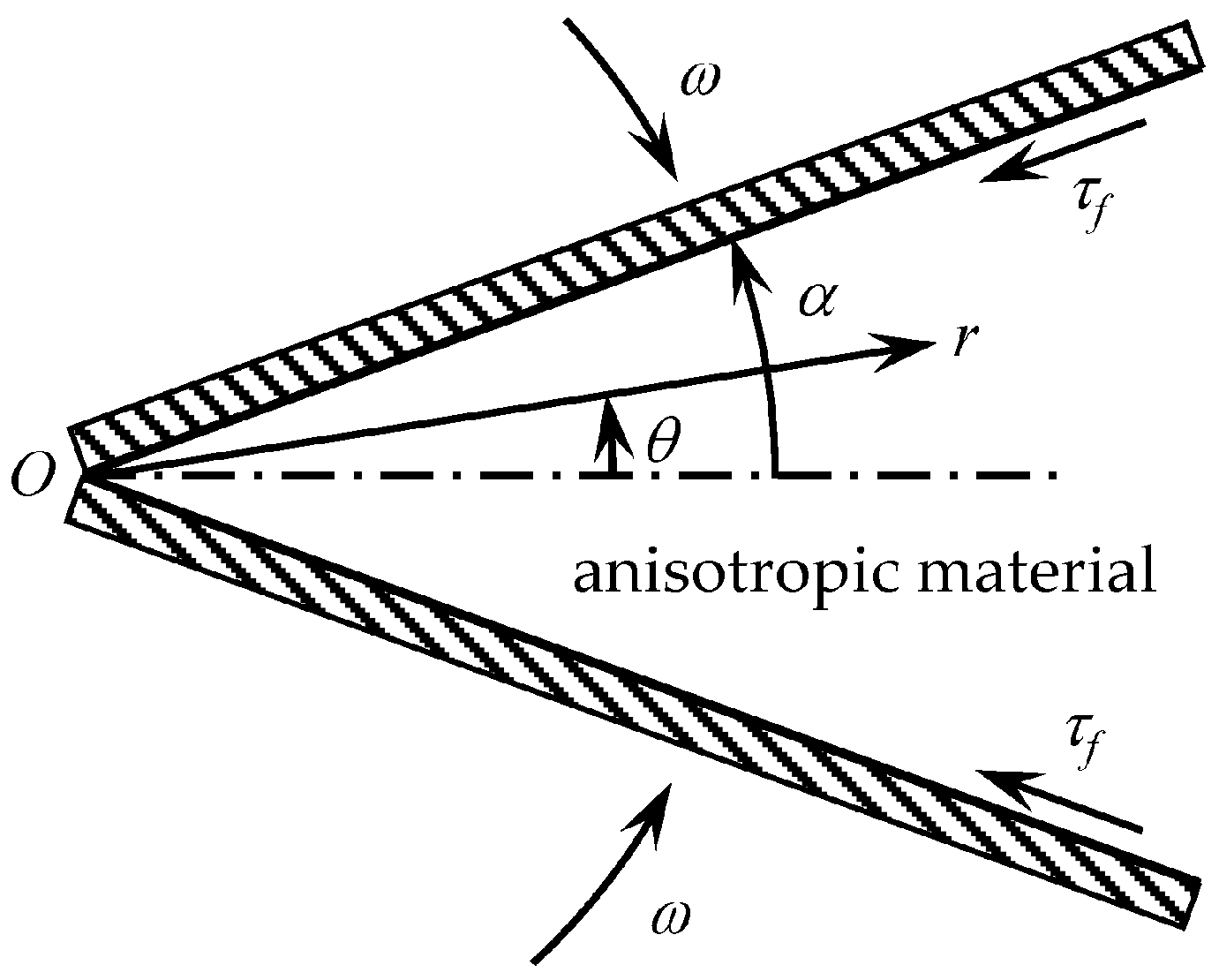
2. Statement of the Problem
3. General Stress Solution
4. General Velocity Solution
5. Solution of the Boundary Value Problem
5.1. Regime of Sticking
5.2. Regime of Sliding
6. Singularity
7. Conclusions
- no solution at sticking exists; and
- the solution at sliding involves no rigid region.
- no solution at sticking exists if ( is introduced in (37)) and the solution for requires a rigid region adjacent to the plate; and
- the solution at sliding exists if and this solution is singular (some stress and velocity derivatives approach infinity in the vicinity of the friction surface).
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Alexandrov, S.; Jeng, Y.-R. Compression of viscoplastic material between rotating plates. Trans. ASME J. Appl. Mech. 2009, 76. [Google Scholar] [CrossRef]
- Alexandrov, S.; Miszuris, W. The transition of qualitative behaviour between rigid perfectly plastic and viscoplastic solutions. J. Eng. Math. 2016, 97, 67–81. [Google Scholar] [CrossRef]
- Alexandrov, S.; Harris, D. An Exact solution for a model of pressure-dependent plasticity in an un-steady plane strain process. Eur. J. Mech. -A/Solids 2010, 29, 966–975. [Google Scholar] [CrossRef]
- Harris, D.; Grekova, E.F. A hyperbolic well-posed model for the flow of granular materials. J. Eng. Math. 2005, 52, 107–135. [Google Scholar] [CrossRef]
- Liang, D.S.; Wang, H.J.; Chen, L.W. Vibration and stability of rotating polar orthotropic annular disks subjected to a stationary concentrated transverse load. J. Sound Vib. 2002, 250, 795–811. [Google Scholar] [CrossRef]
- Koo, K.N. Vibration analysis and critical speeds of polar orthotropic annular disks in rotation. Compos. Struct. 2006, 76, 67–72. [Google Scholar] [CrossRef]
- Peng, X.-L.; Li, X.-F. Elastic analysis of rotating functionally graded polar orthotropic disks. Int. J. Mech. Sci. 2012, 60, 84–91. [Google Scholar] [CrossRef]
- Jeong, W.; Alexandrov, S.; Lang, L. Effect of plastic anisotropy on the distribution of residual stresses and strains in rotating annular disks. Symmetry 2018, 10, 420. [Google Scholar] [CrossRef]
- Alexandrov, S.; Jeng, Y.-R. Singular rigid/plastic solutions in anisotropic plasticity under plane strain conditions. Cont. Mech. Therm. 2013, 25, 685–689. [Google Scholar] [CrossRef]
- Orowan, E. The calculation of roll pressure in hot and cold flat rolling. Proc. Inst. Mech. Eng. 1943, 150, 140–167. [Google Scholar] [CrossRef]
- Kimura, H. Application of Orowan theory to hot rolling of aluminum. J. Jpn. Inst. Light Met. 1985, 35, 222–227. [Google Scholar] [CrossRef]
- Kimura, H. Application of Orowan theory to hot rolling of aluminum: computer control of hot rolling of aluminum. Sumitomo Light Met. Tech. Rep. 1985, 26, 189–194. [Google Scholar]
- Lenard, J.G.; Wang, F.; Nadkarni, G. Role of constitutive formulation in the analysis of hot rolling. Trans. ASME J. Eng. Mater. Technol. 1987, 109, 343–349. [Google Scholar] [CrossRef]
- Atreya, A.; Lenard, J.G. Study of cold strip rolling. Trans. ASME J. Eng. Mater. Technol. 1979, 101, 129–134. [Google Scholar] [CrossRef]
- Domanti, S.; McElwain, D.L.S. Two-dimensional plane strain rolling: an asymptotic approach to the estimation of inhomogeneous effects. Int. J. Mech. Sci. 1995, 37, 175–196. [Google Scholar] [CrossRef]
- Cawthorn, C.J.; Loukaides, F.G.; Allwood, J.M. Comparison of analytical models for sheet rolling. Proc. Eng. 2014, 81, 2451–2456. [Google Scholar] [CrossRef]
- Hill, R. The Mathematical Theory of Plasticity; Clarendon Press: Oxford, UK, 1950. [Google Scholar]
- Collins, I.F.; Meguid, S.A. On the influence of hardening and anisotropy on the plane-strain compression of thin metal strip. Trans. ASME J. Appl. Mech. 1977, 44, 272–278. [Google Scholar] [CrossRef]
- Alexandrov, S.; Mishuris, G. Viscoplasticity with a saturation stress: distinguished features of the model. Arch. Appl. Mech. 2007, 77, 35–47. [Google Scholar] [CrossRef]

© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alexandrov, S.; Lyamina, E.; Chinh, P.; Lang, L. Compression of a Polar Orthotropic Wedge between Rotating Plates: Distinguished Features of the Solution. Symmetry 2019, 11, 270. https://doi.org/10.3390/sym11020270
Alexandrov S, Lyamina E, Chinh P, Lang L. Compression of a Polar Orthotropic Wedge between Rotating Plates: Distinguished Features of the Solution. Symmetry. 2019; 11(2):270. https://doi.org/10.3390/sym11020270
Chicago/Turabian StyleAlexandrov, Sergei, Elena Lyamina, Pham Chinh, and Lihui Lang. 2019. "Compression of a Polar Orthotropic Wedge between Rotating Plates: Distinguished Features of the Solution" Symmetry 11, no. 2: 270. https://doi.org/10.3390/sym11020270
APA StyleAlexandrov, S., Lyamina, E., Chinh, P., & Lang, L. (2019). Compression of a Polar Orthotropic Wedge between Rotating Plates: Distinguished Features of the Solution. Symmetry, 11(2), 270. https://doi.org/10.3390/sym11020270