Improved Hydrodynamic Analysis of 3-D Hydrofoil and Marine Propeller Using the Potential Panel Method Based on B-Spline Scheme



Abstract
:1. Introduction
2. Methodology
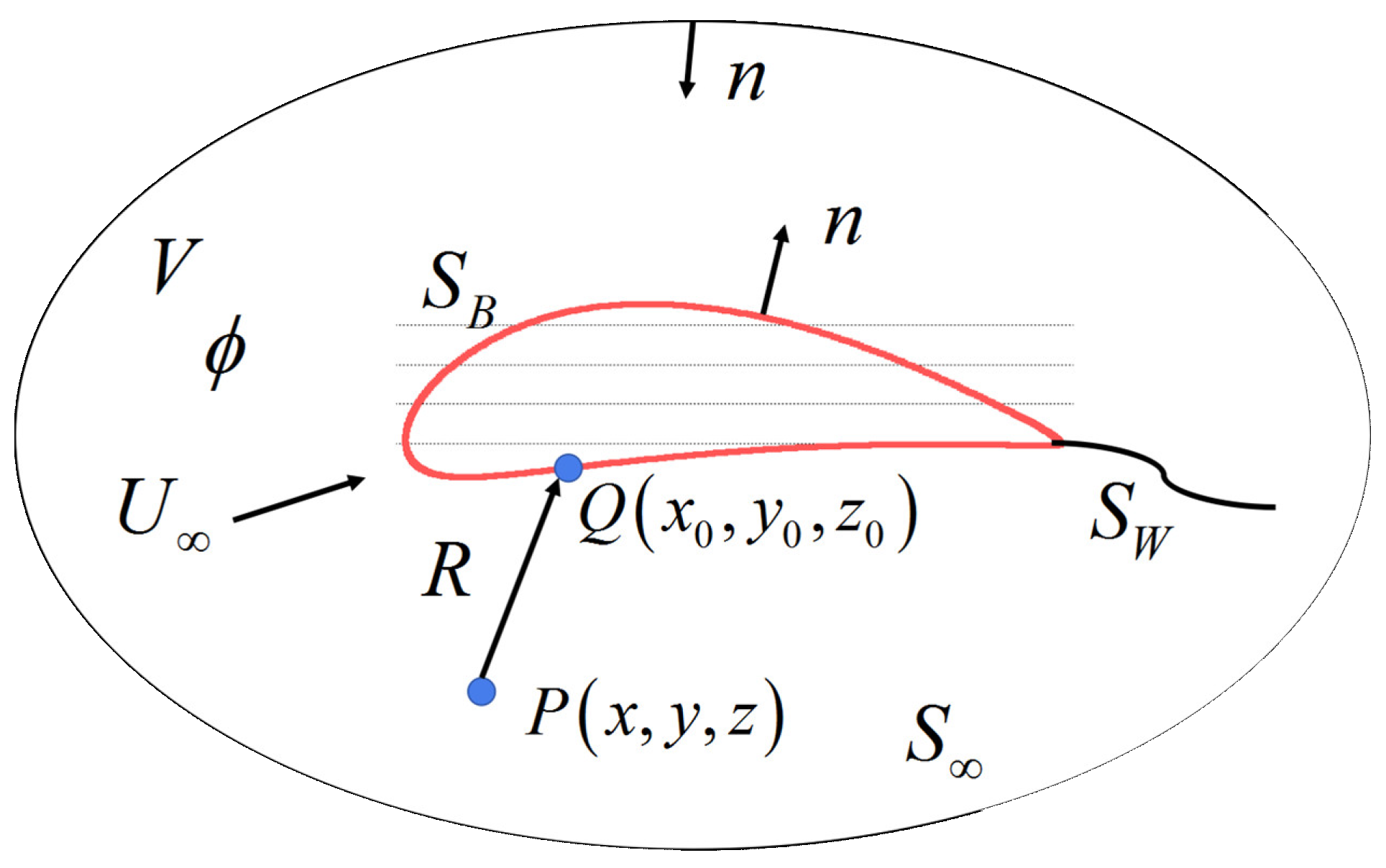
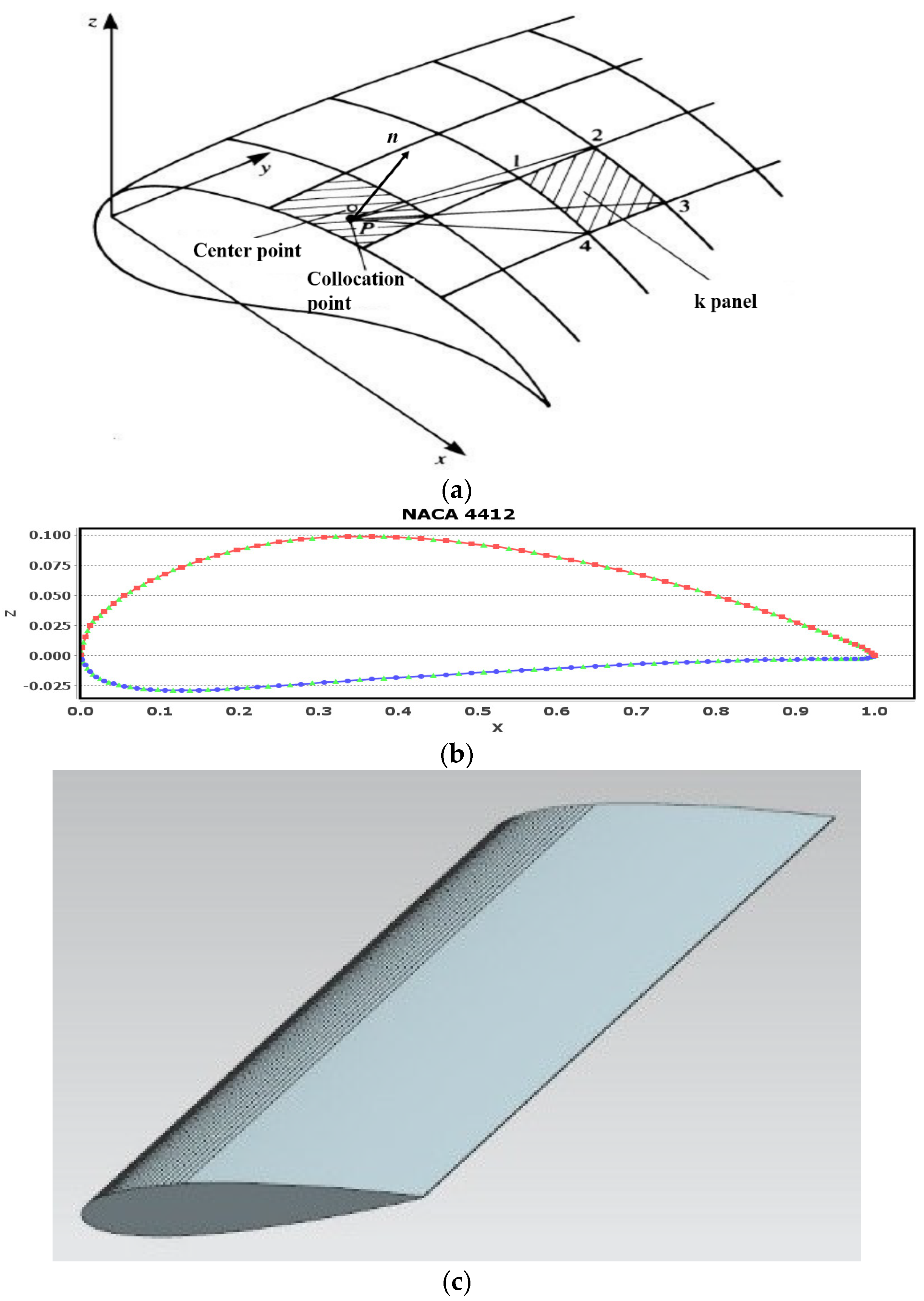
2.1. Surface Panel Method
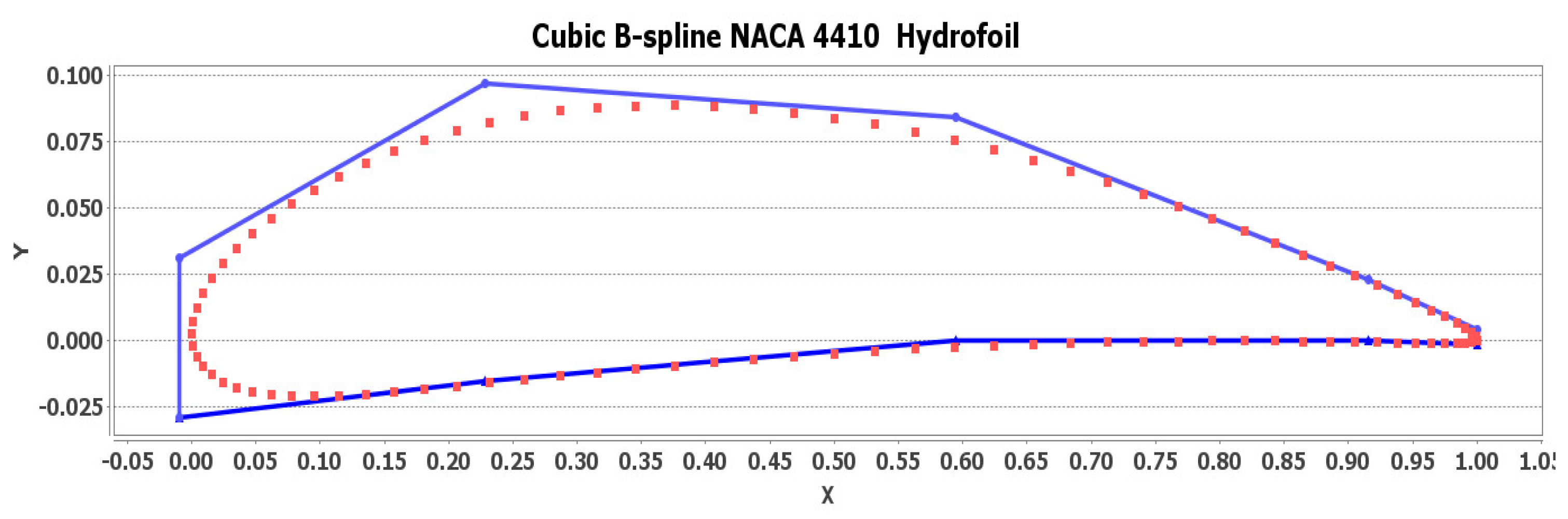
2.2. B-Spline Model Scheme
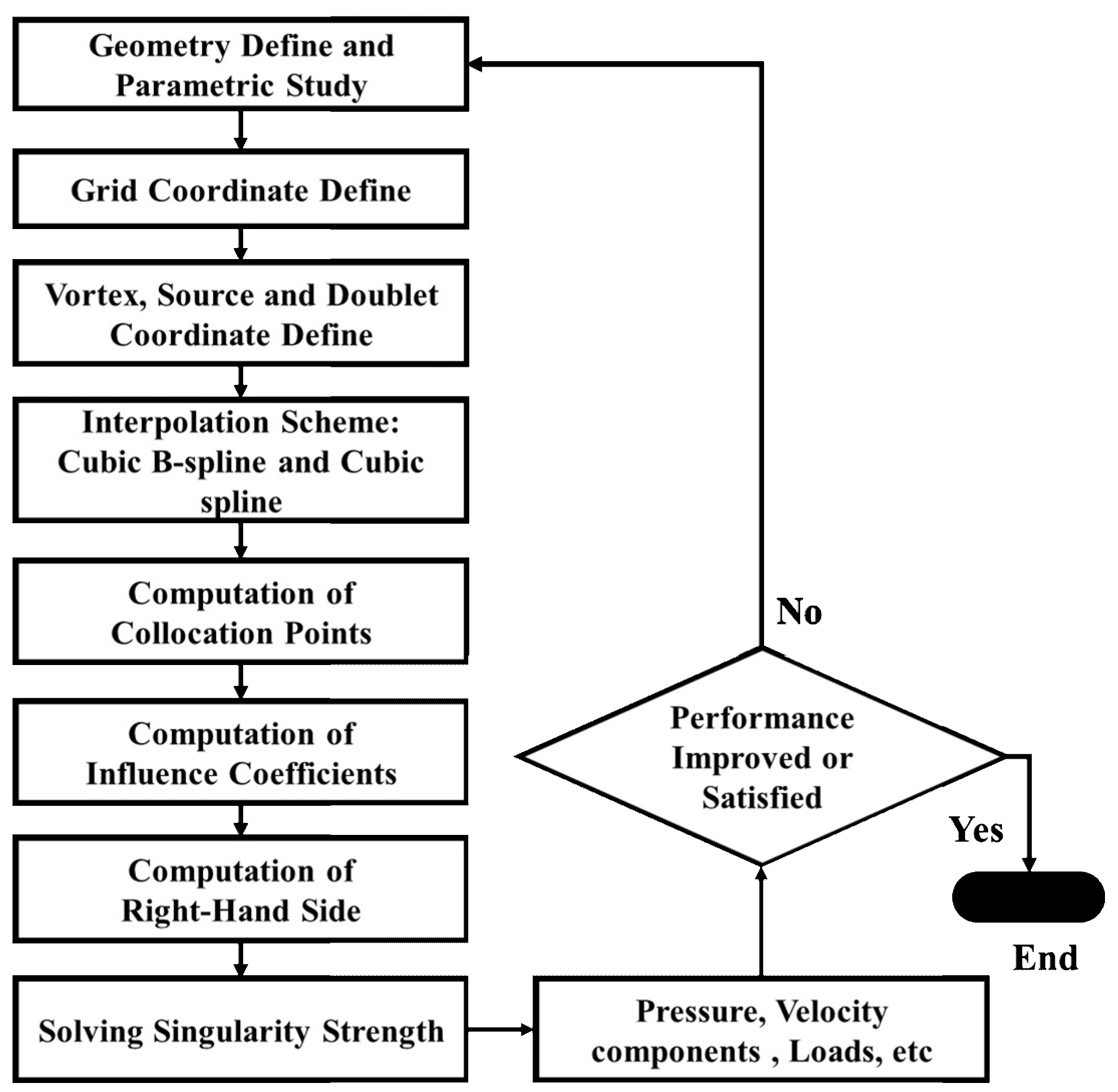
2.3. Numerical Representation of Surface Panel Method
Modelling of 3-D Hydrofoil
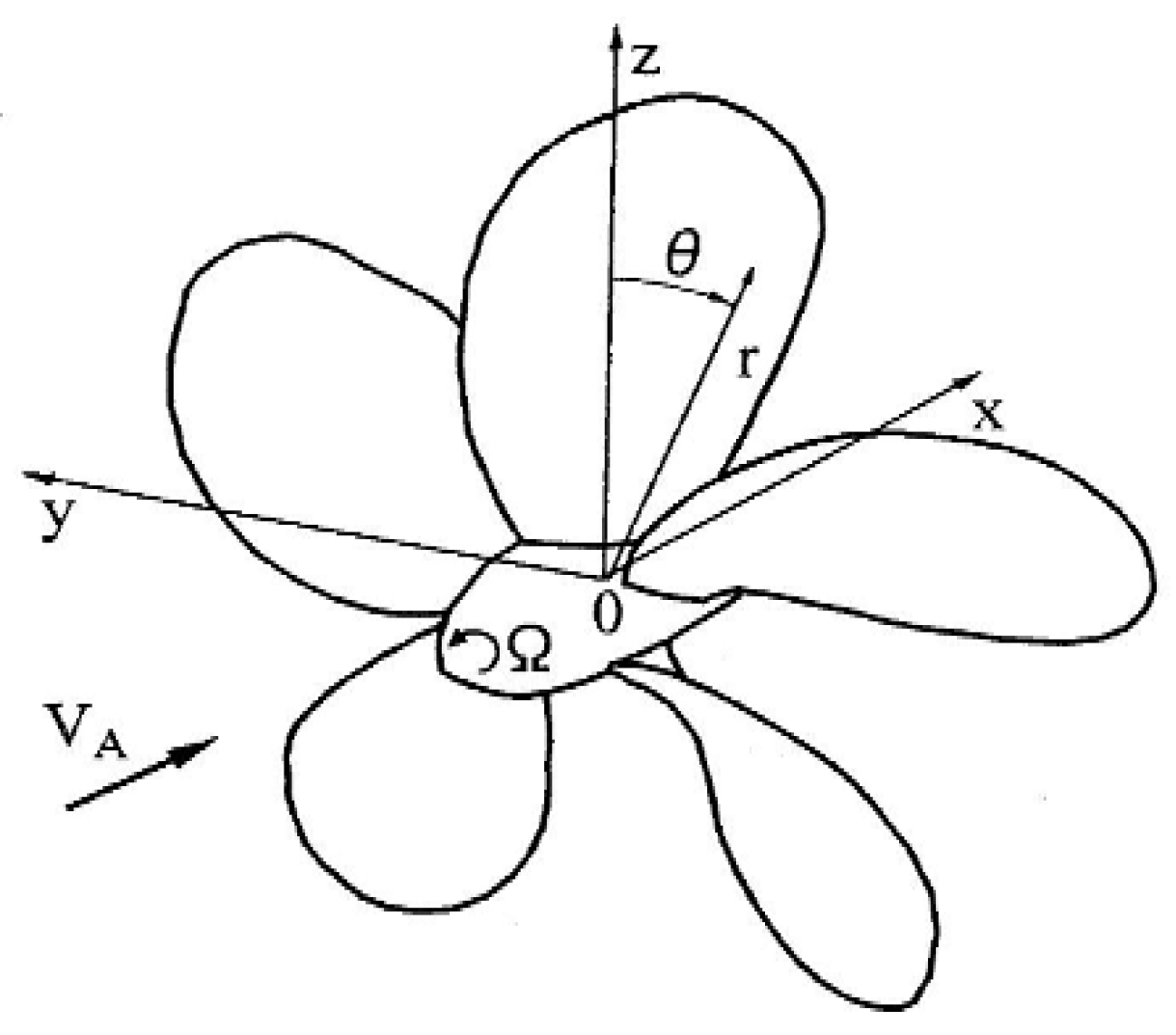
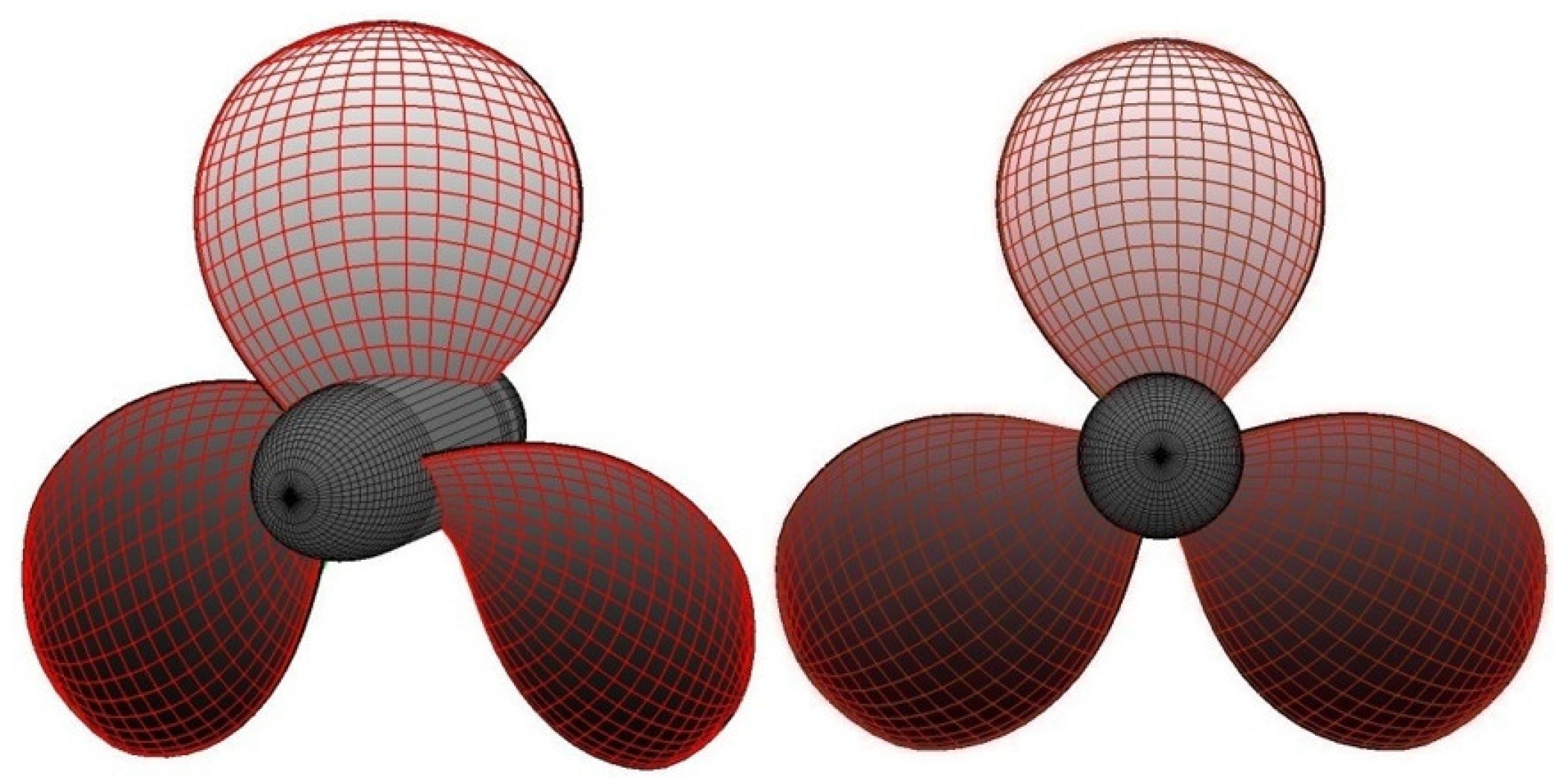
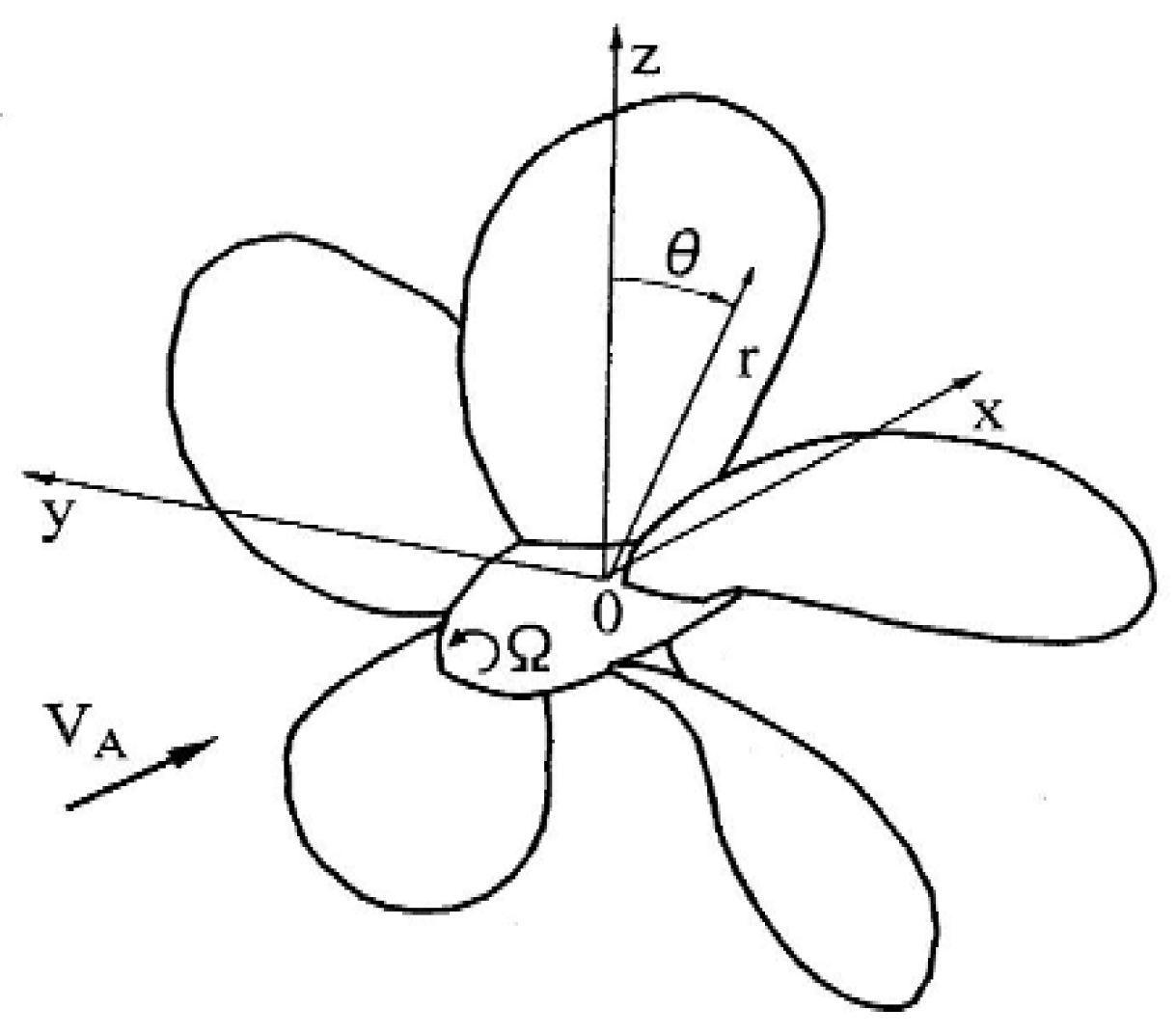
2.4. Numerical Modelling of 3-D Propeller
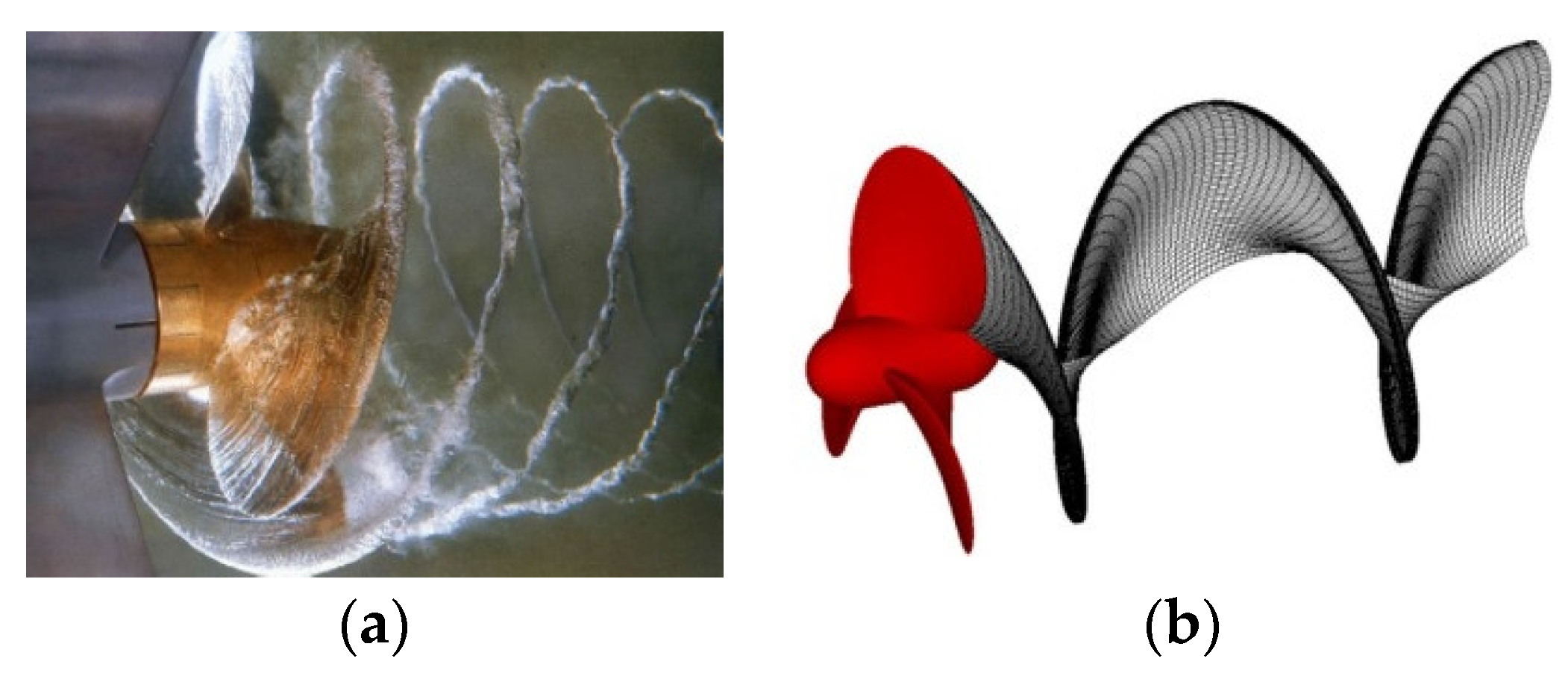
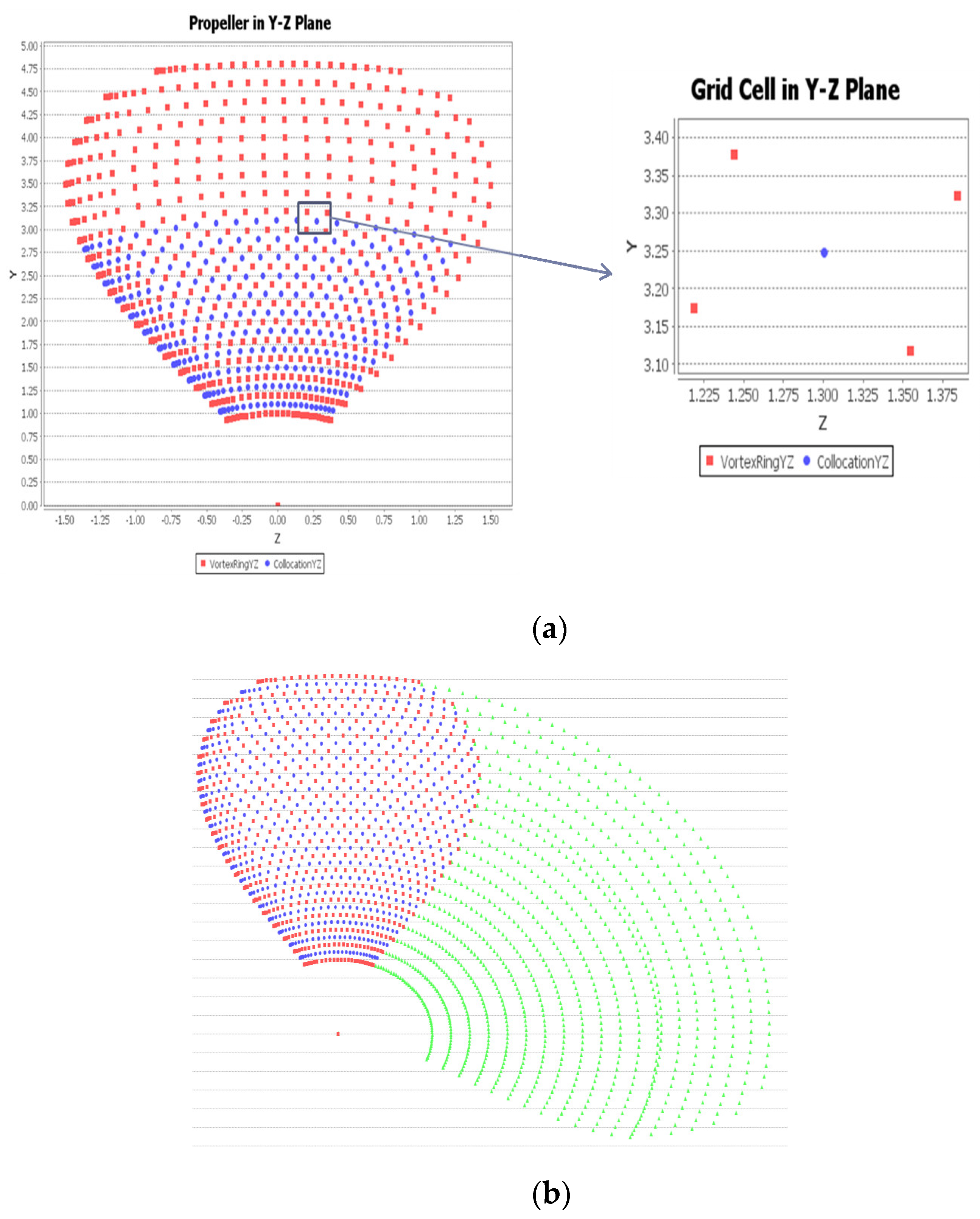
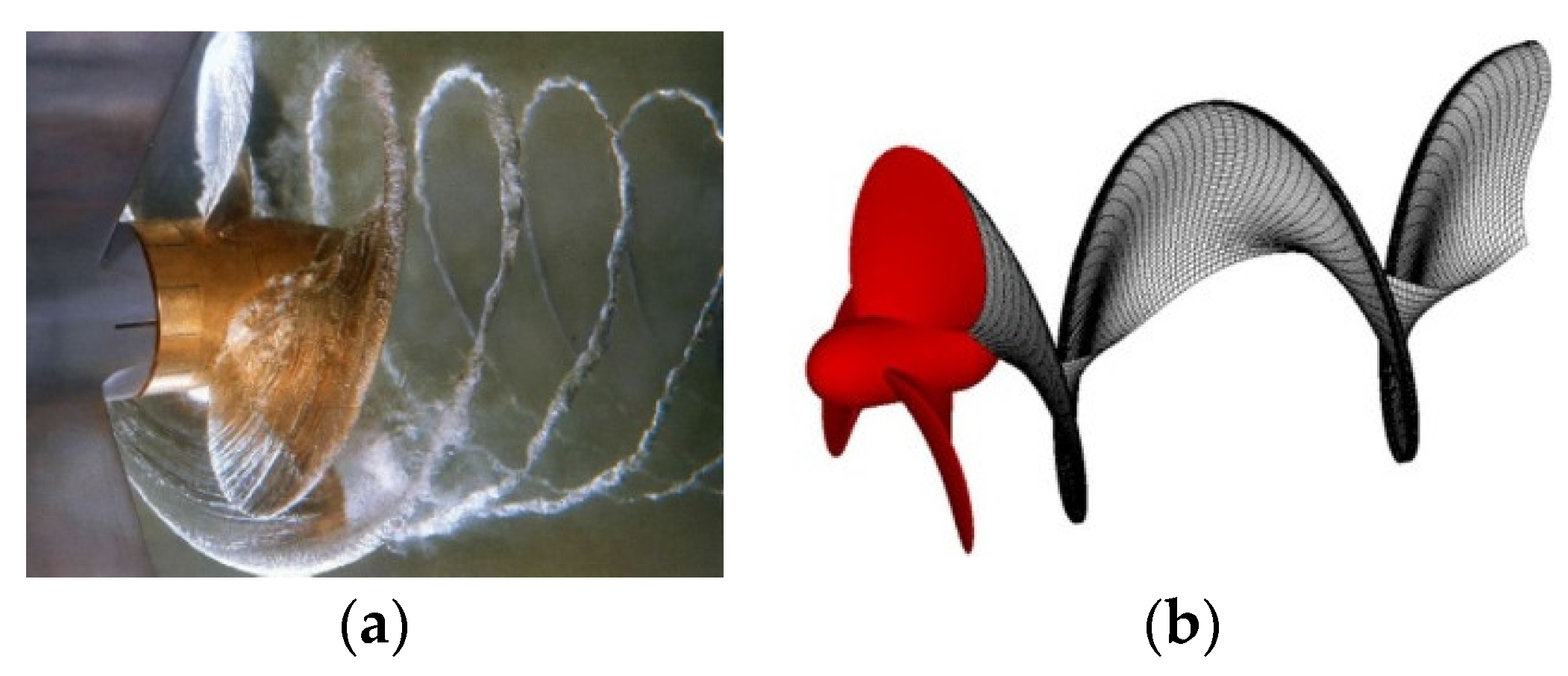
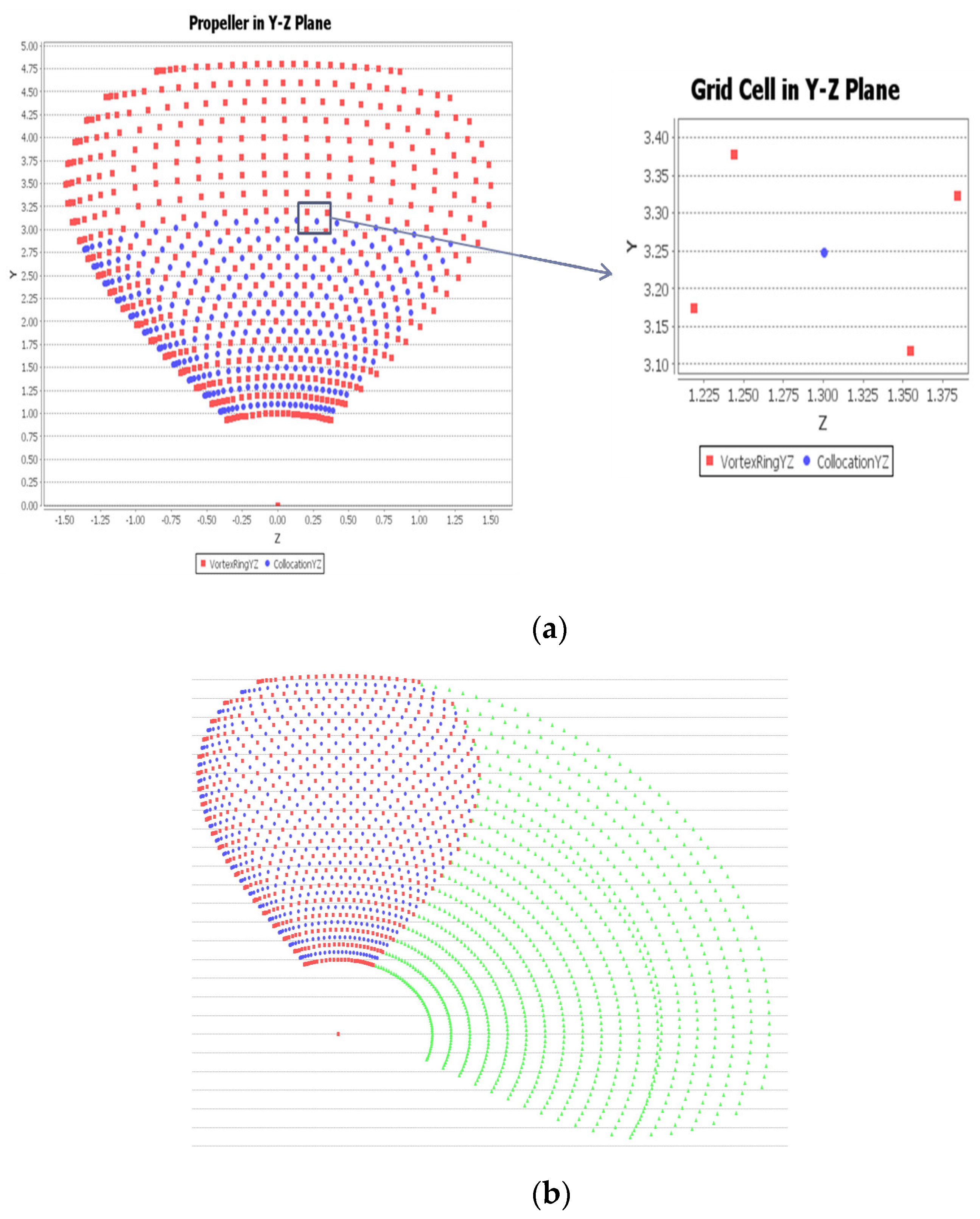
Propeller Wake Model
3. Results
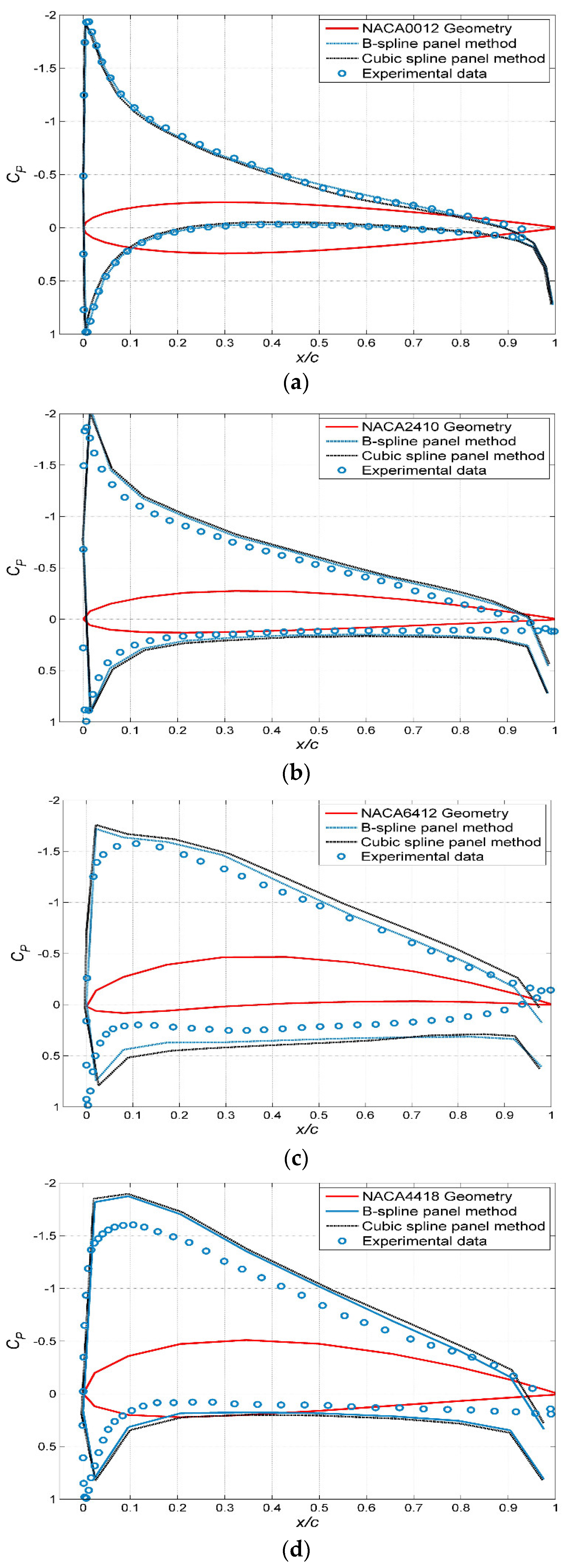
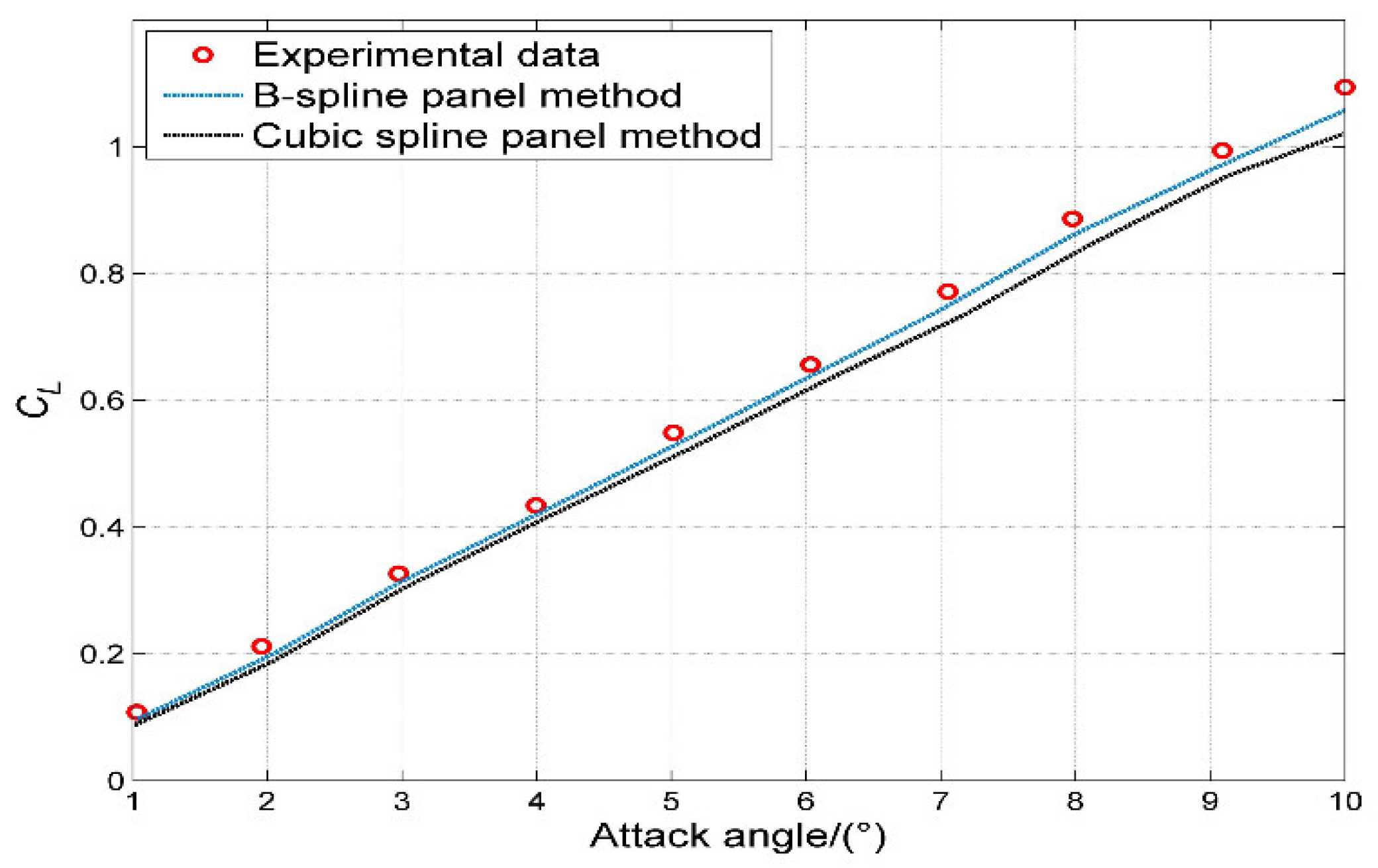
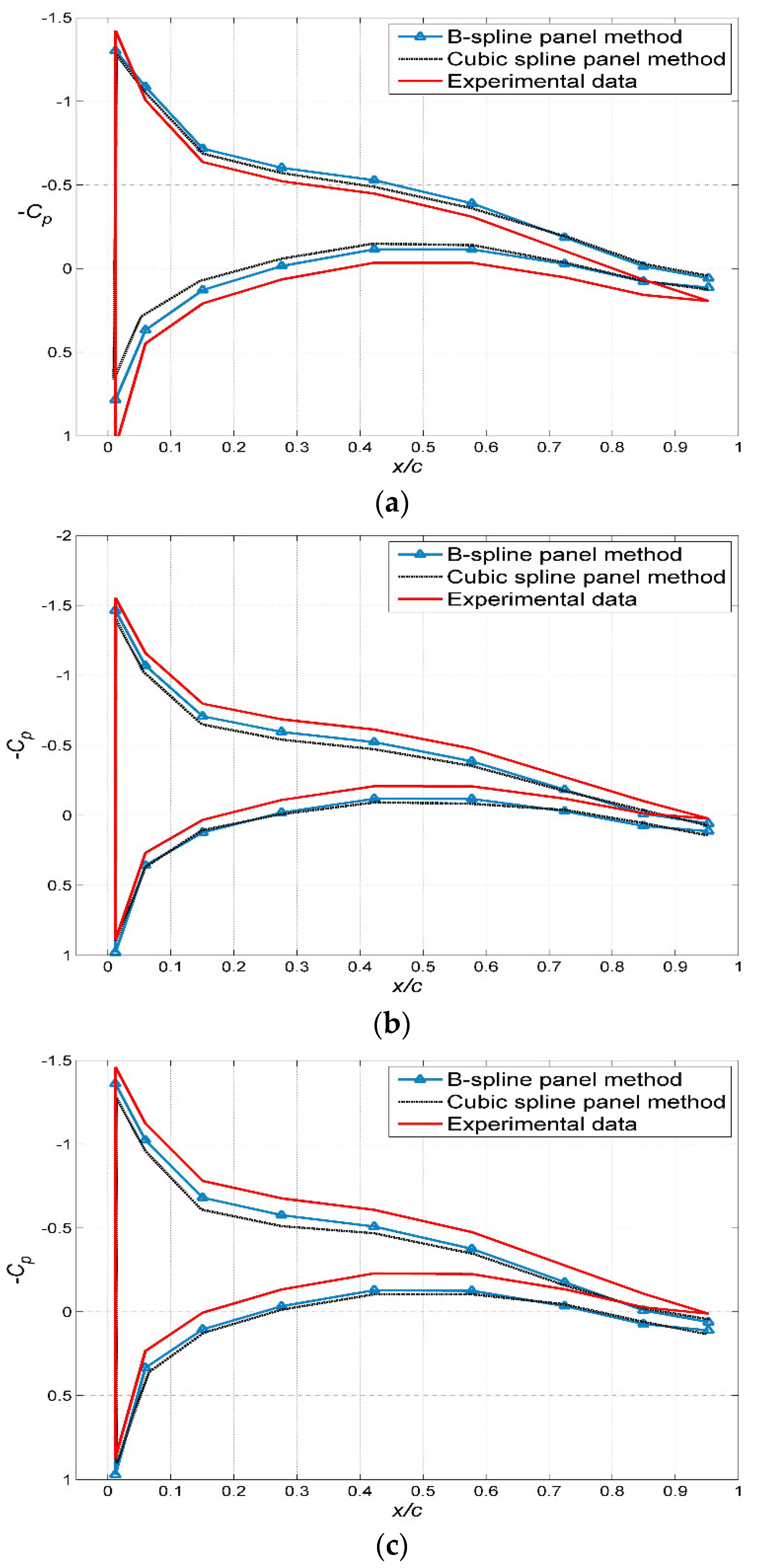
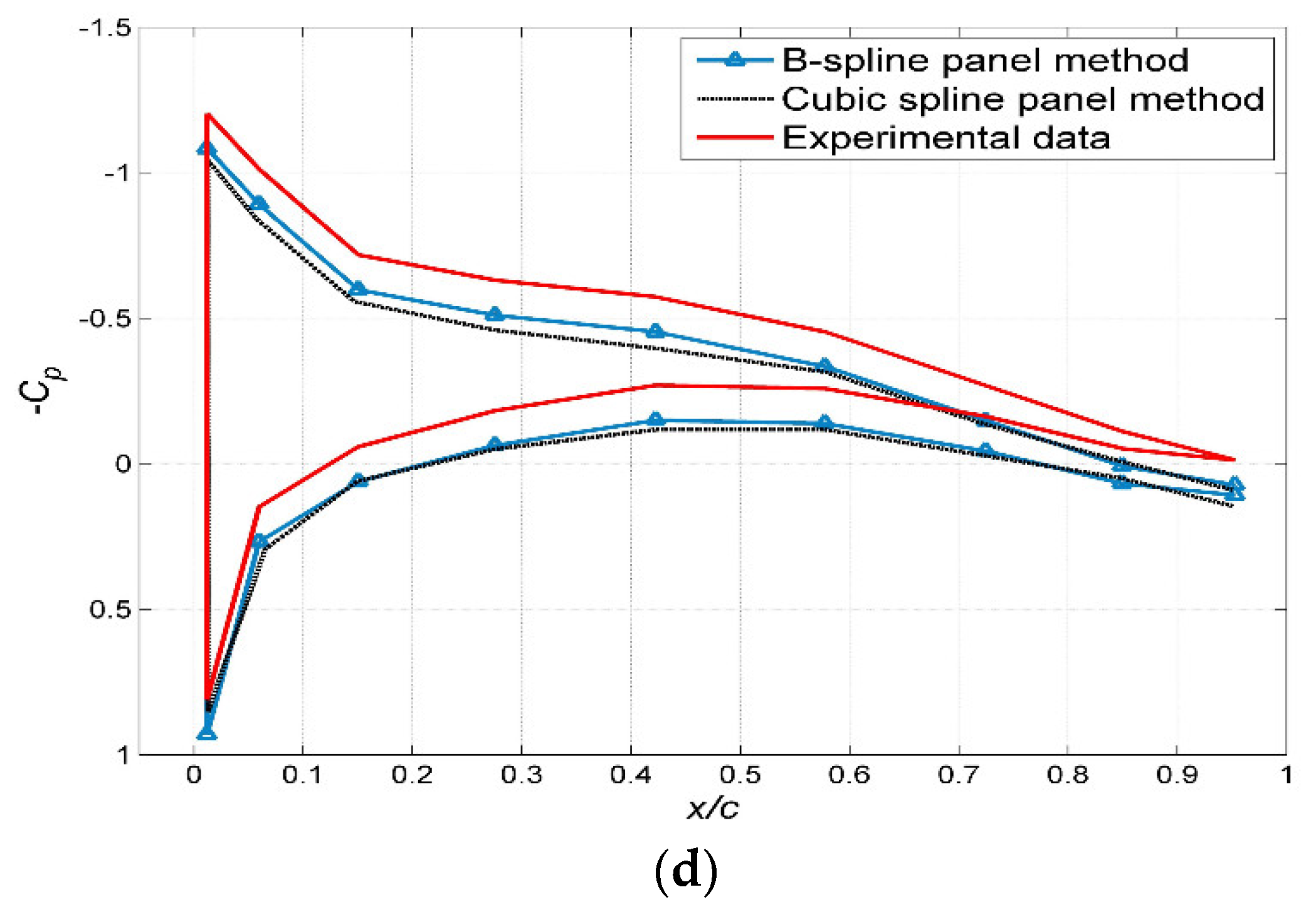
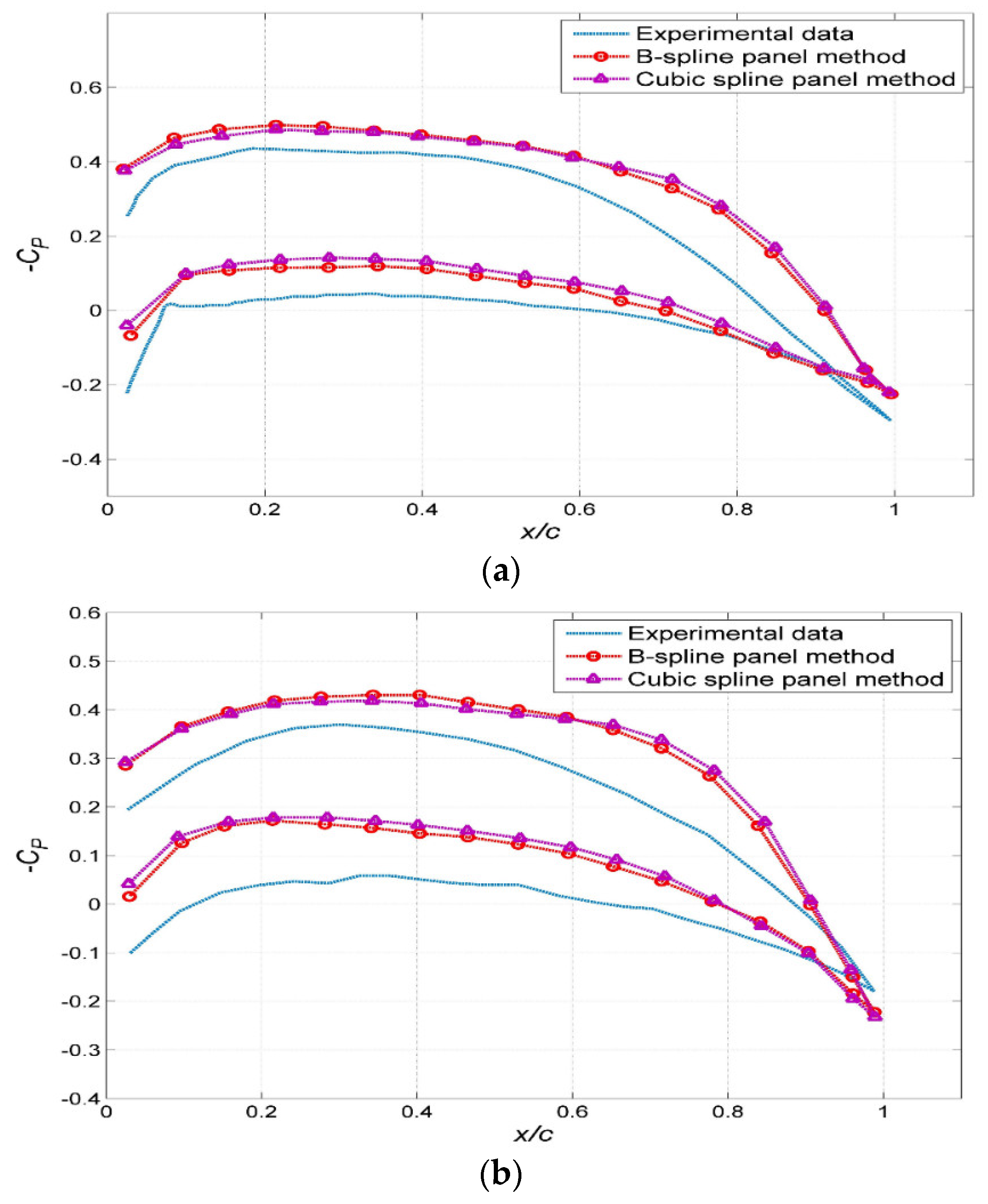
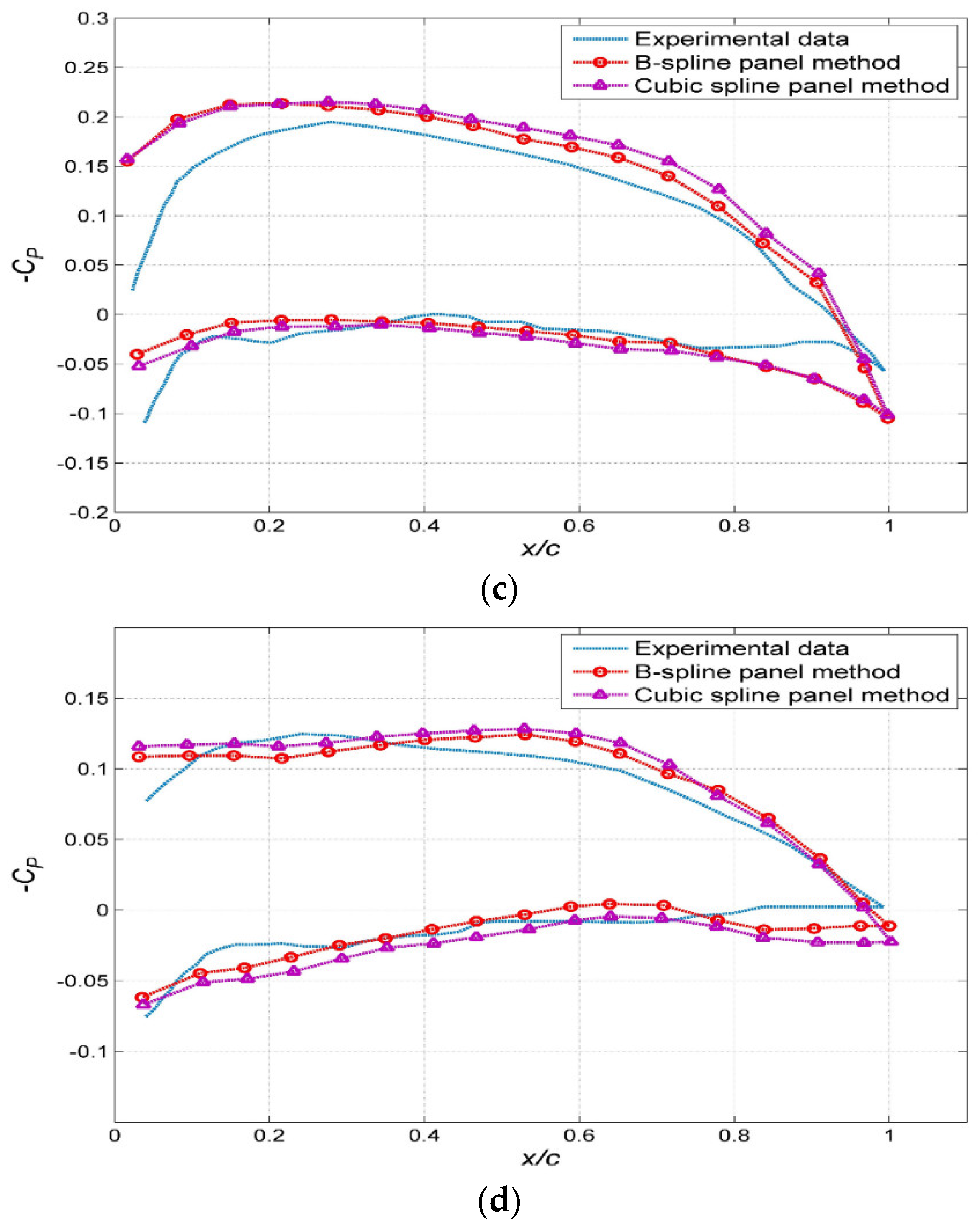
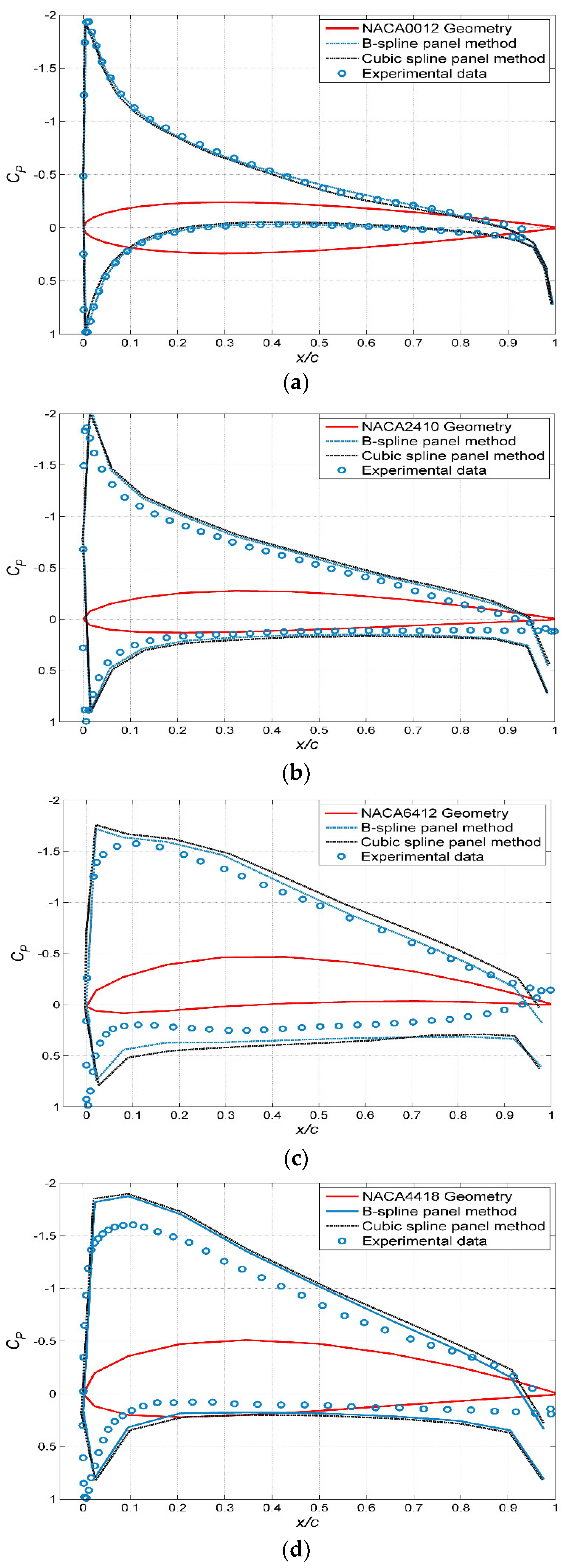
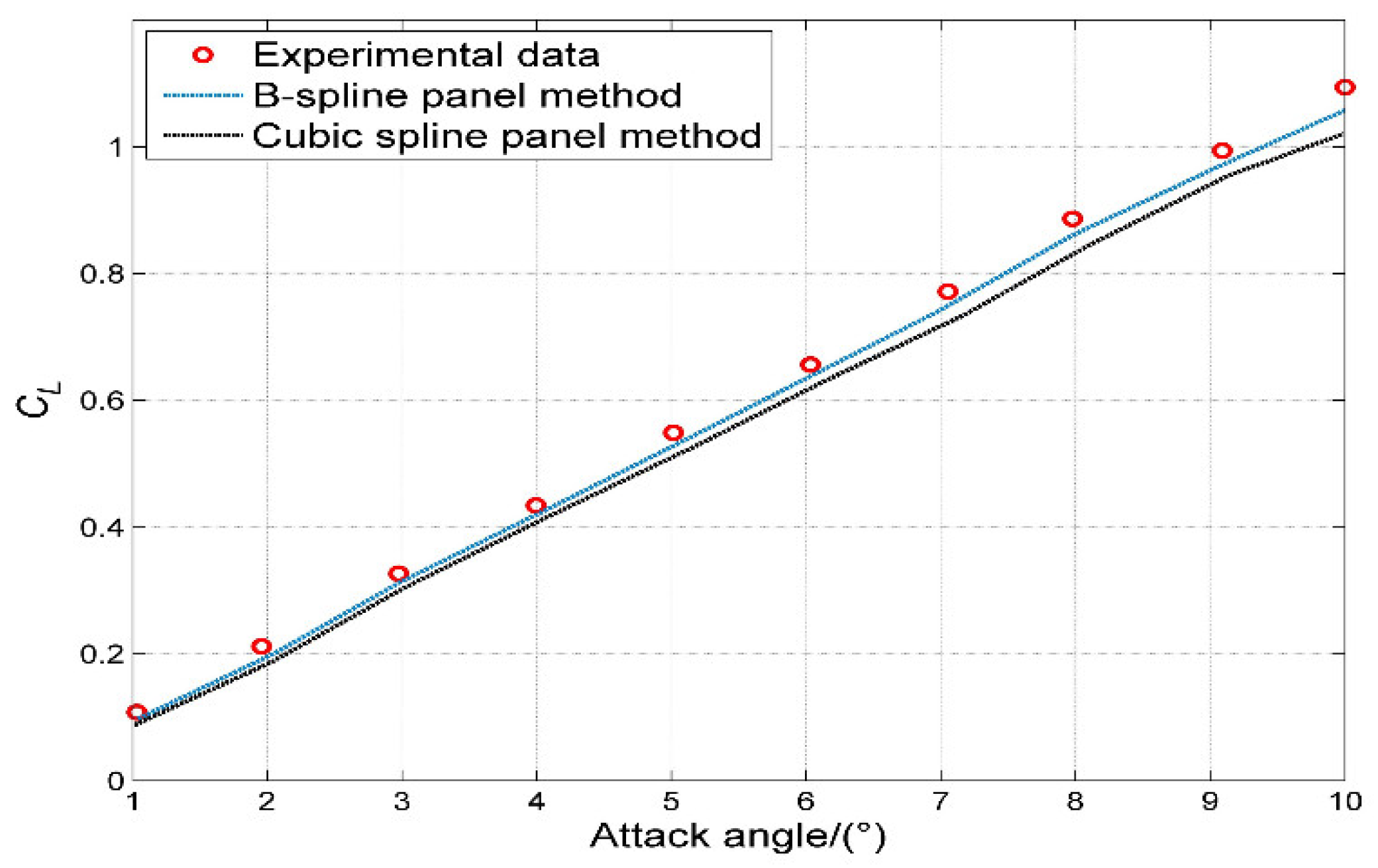
3.1. Validation of the Panel Method Using 2-D Hydrofoil Performance
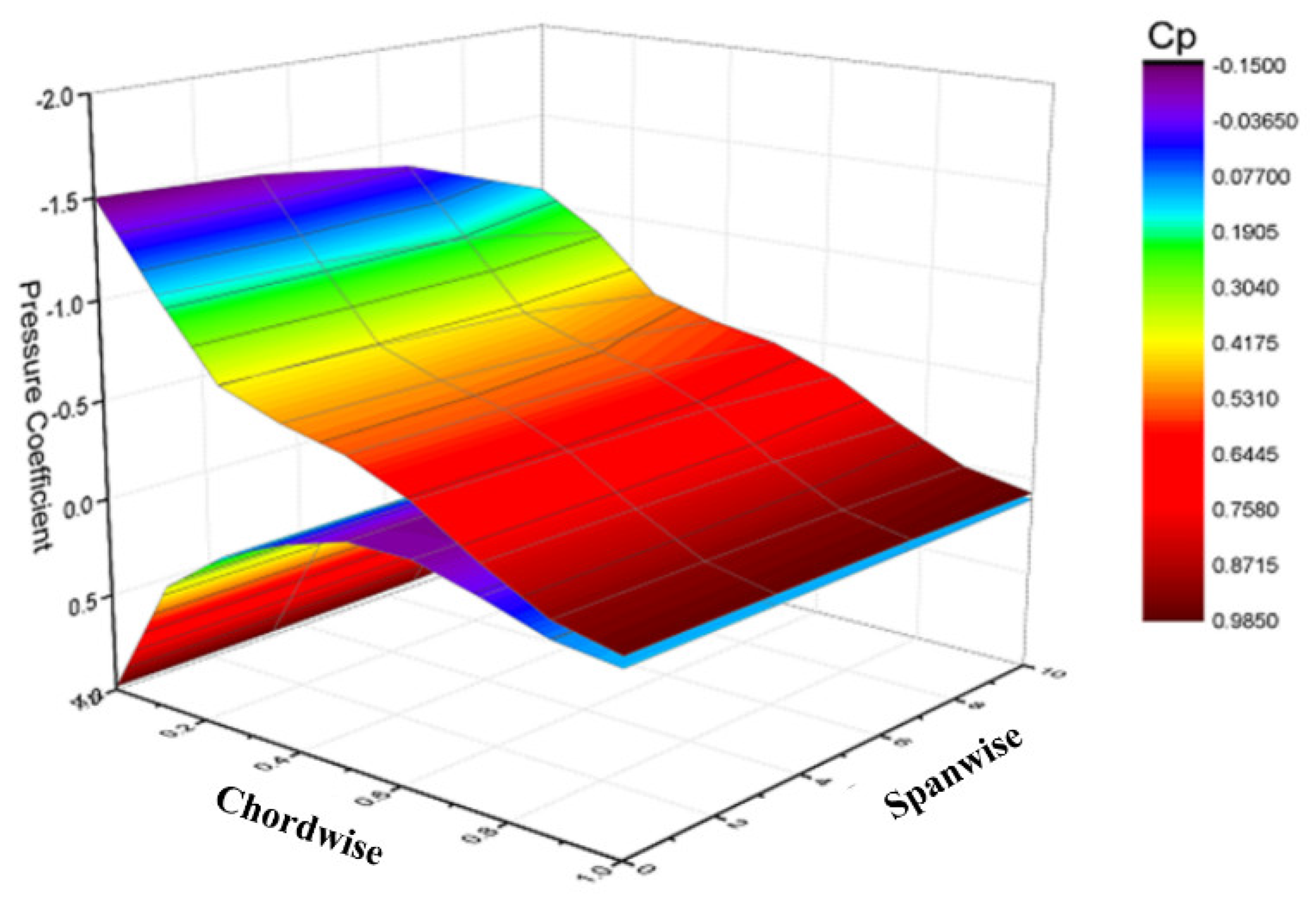
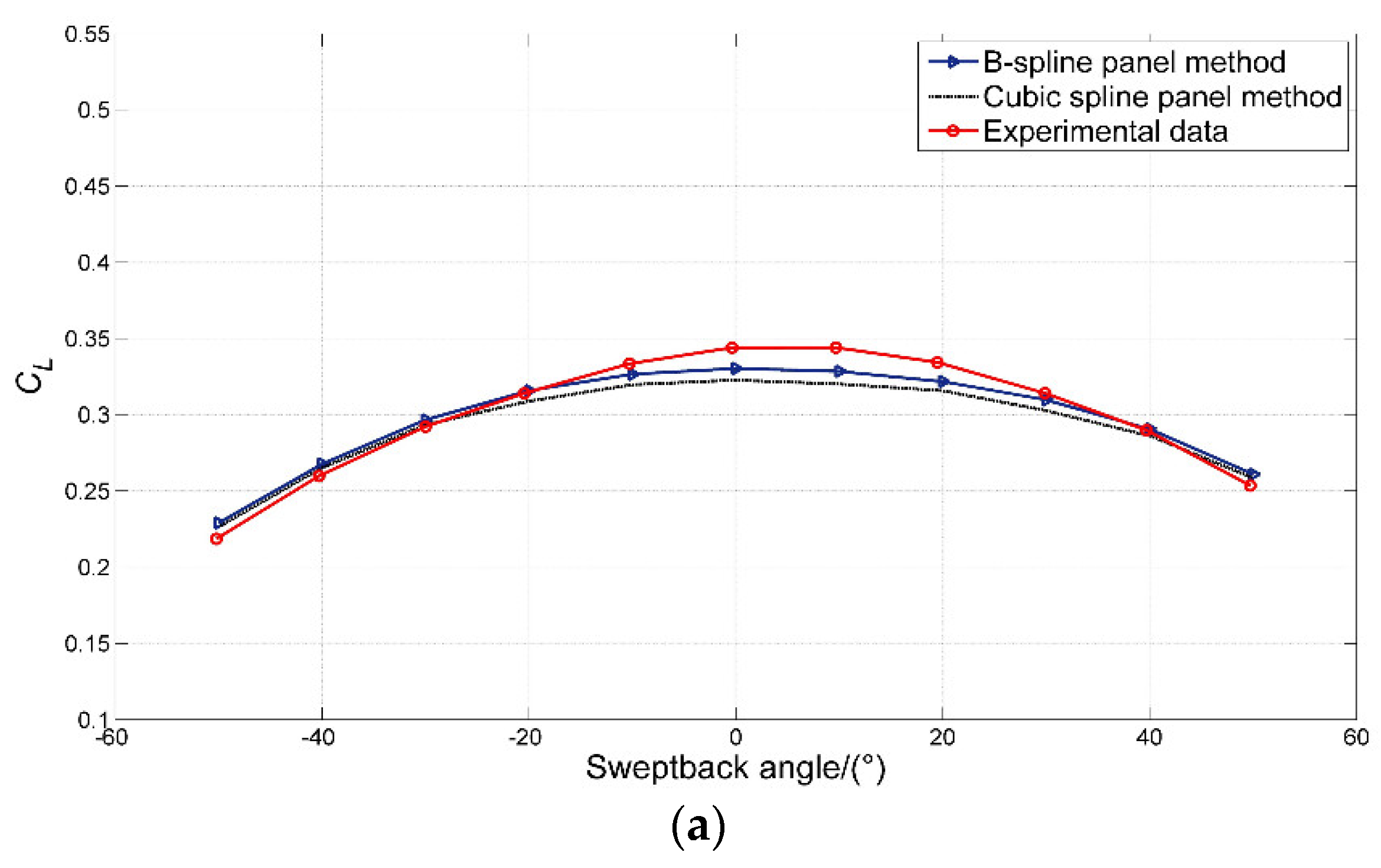
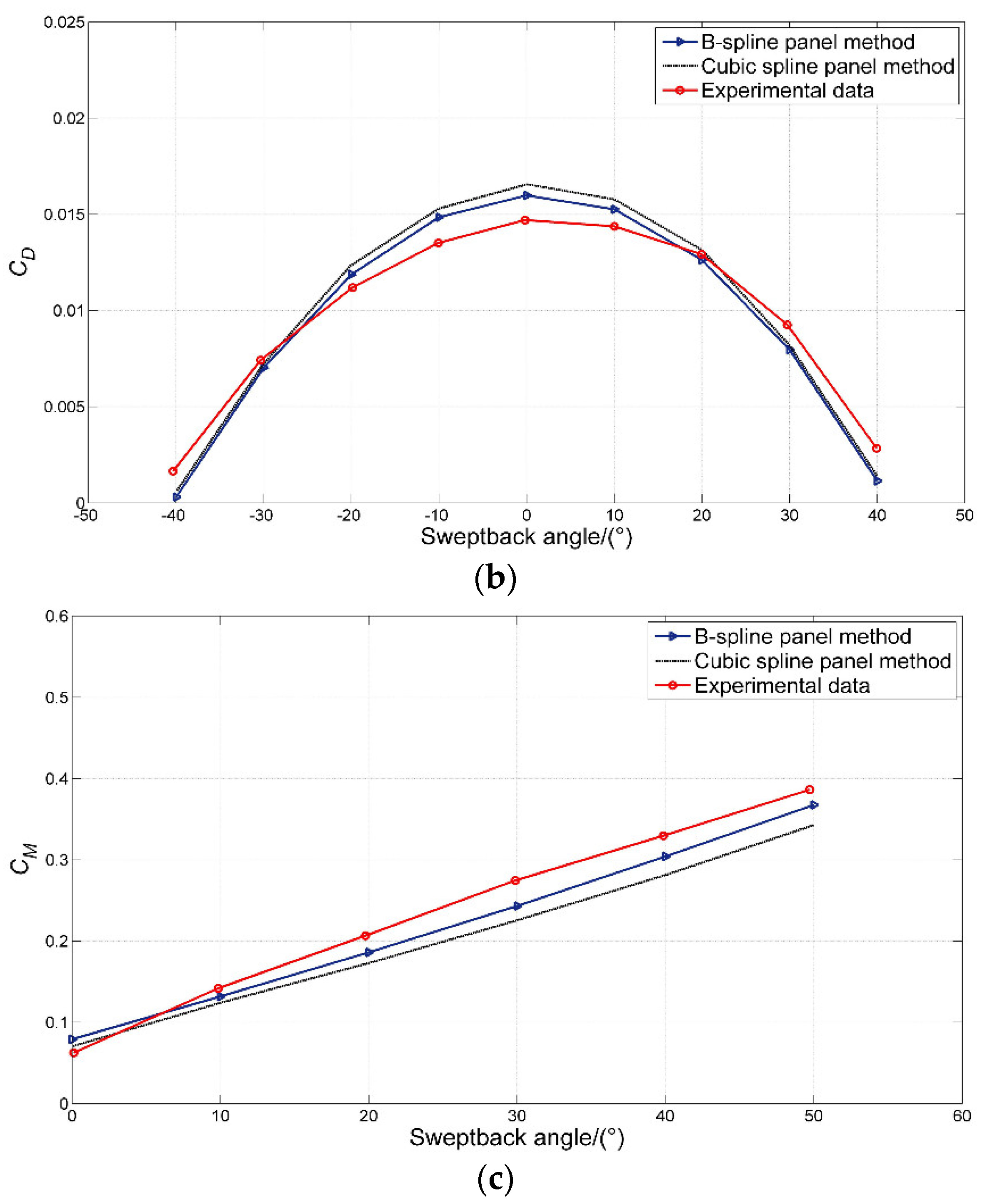
3.2. Validation of the Panel Method Using 3-D Hydrofoil Performance
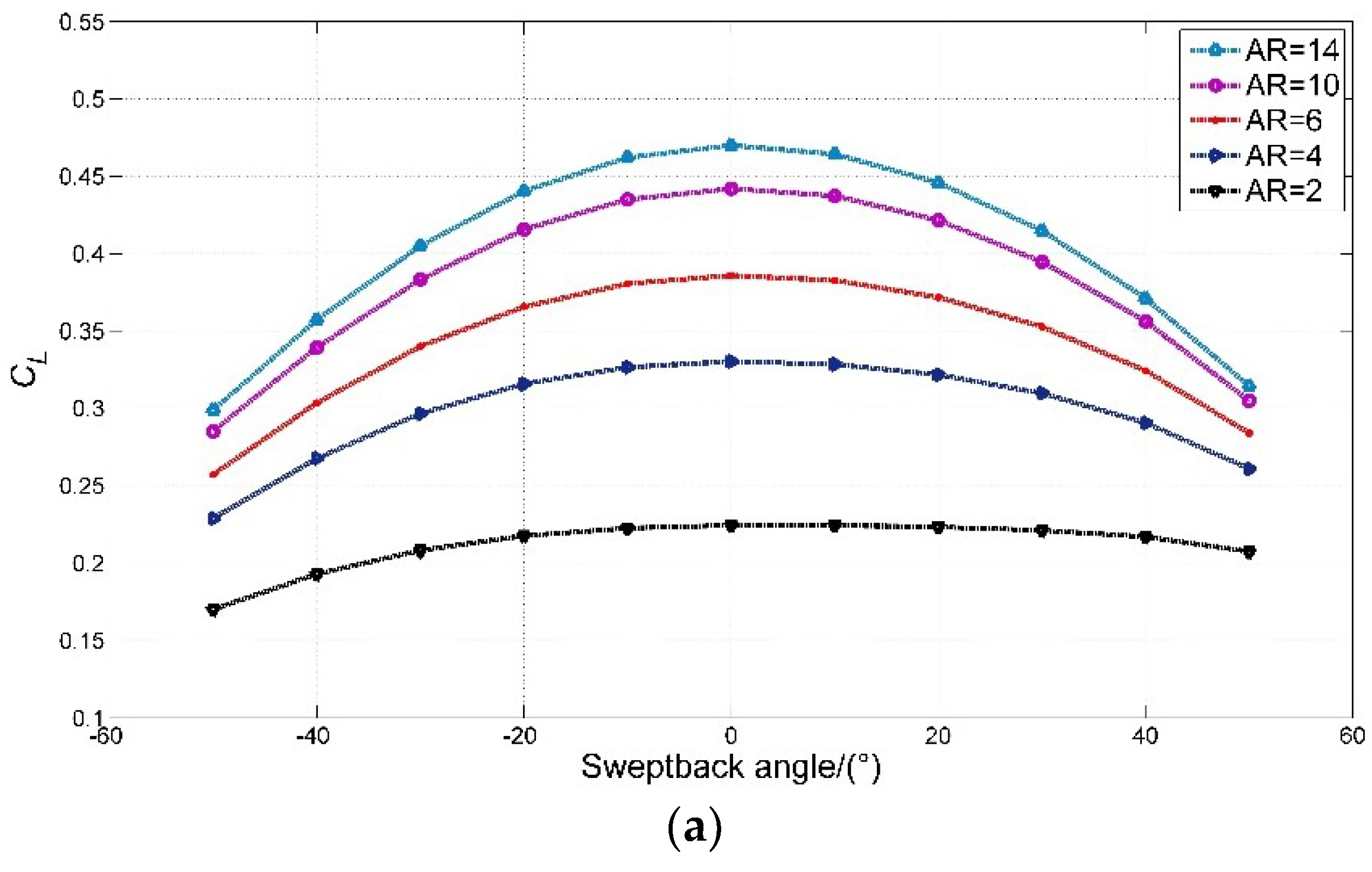
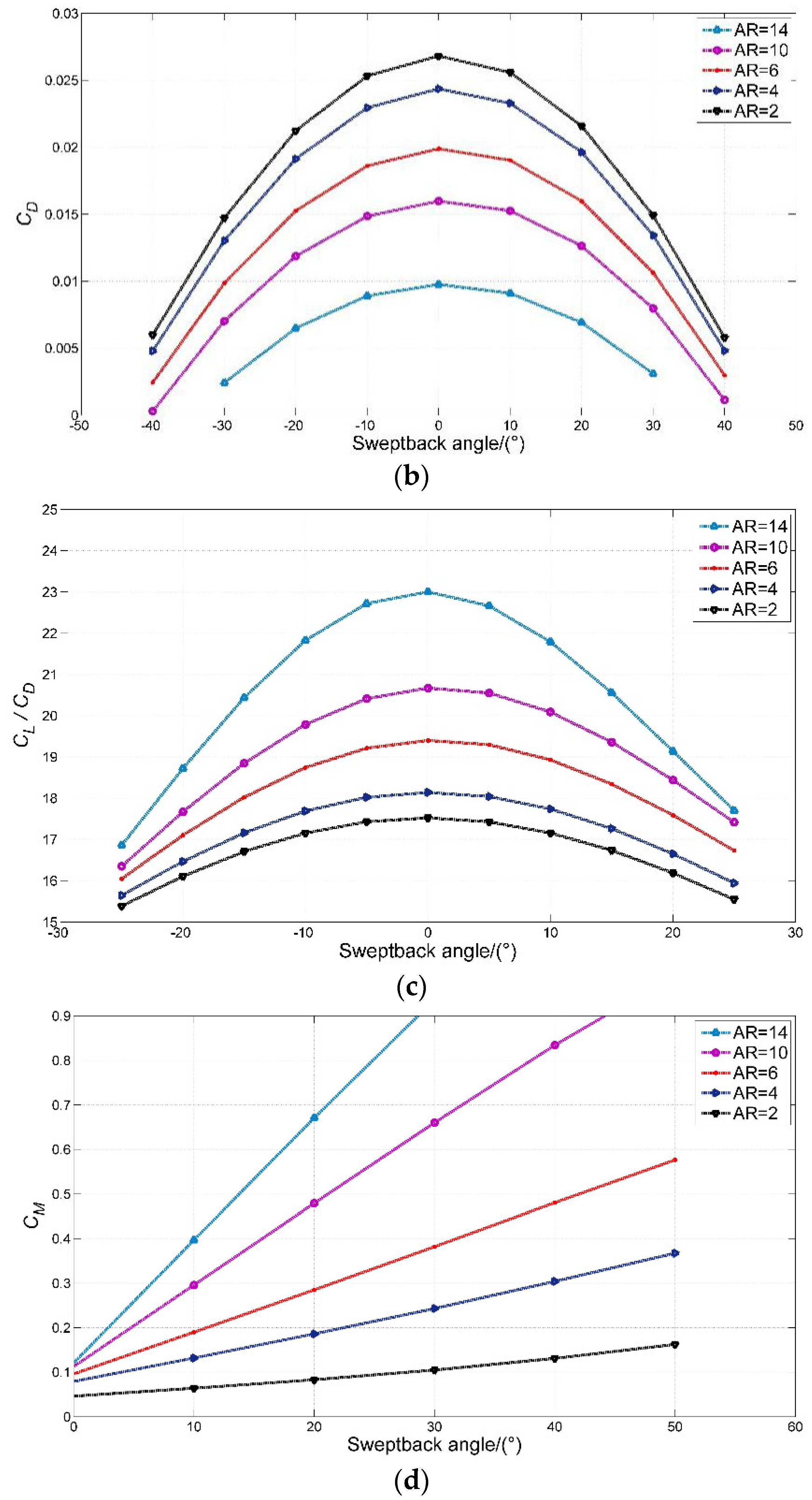
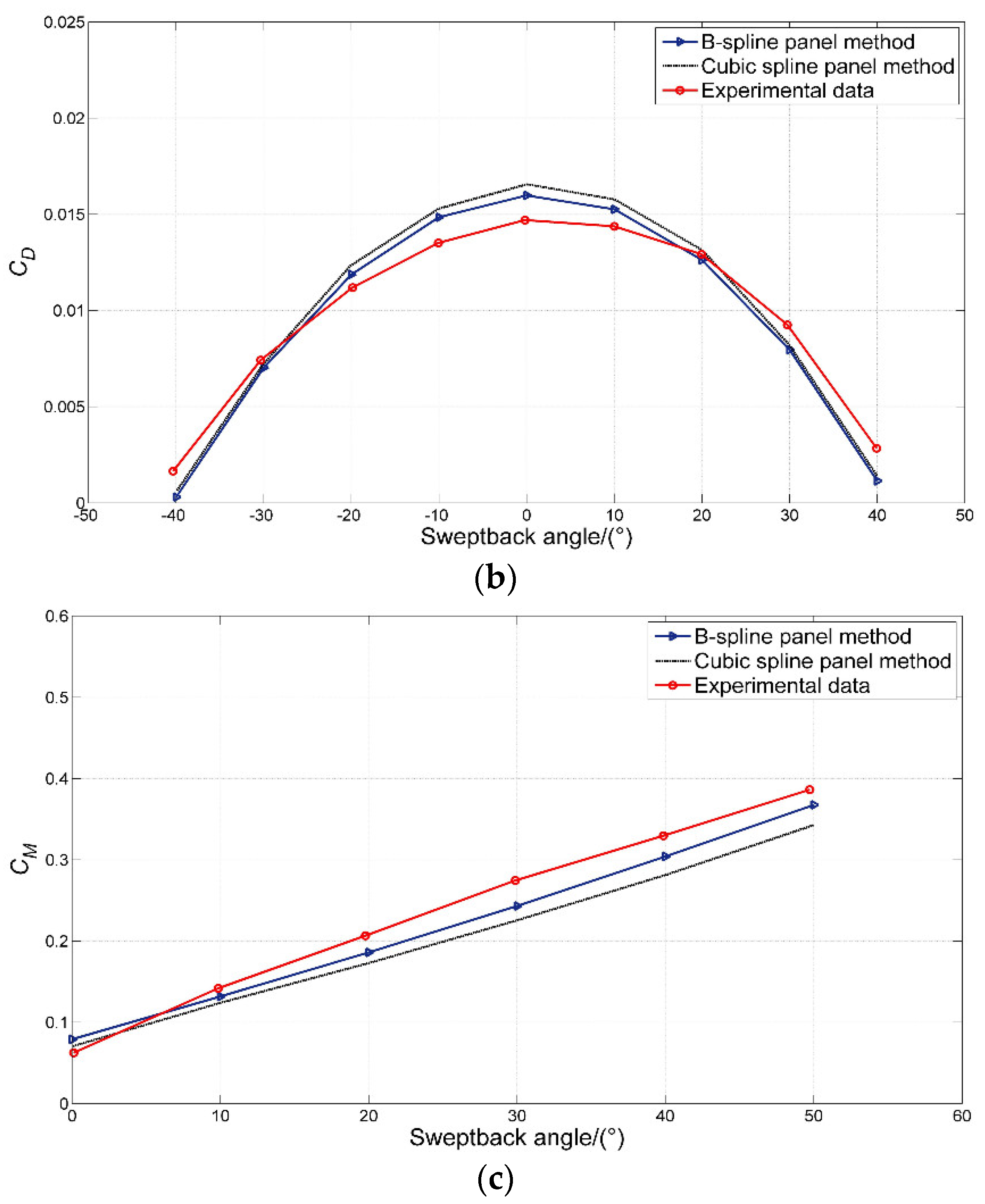
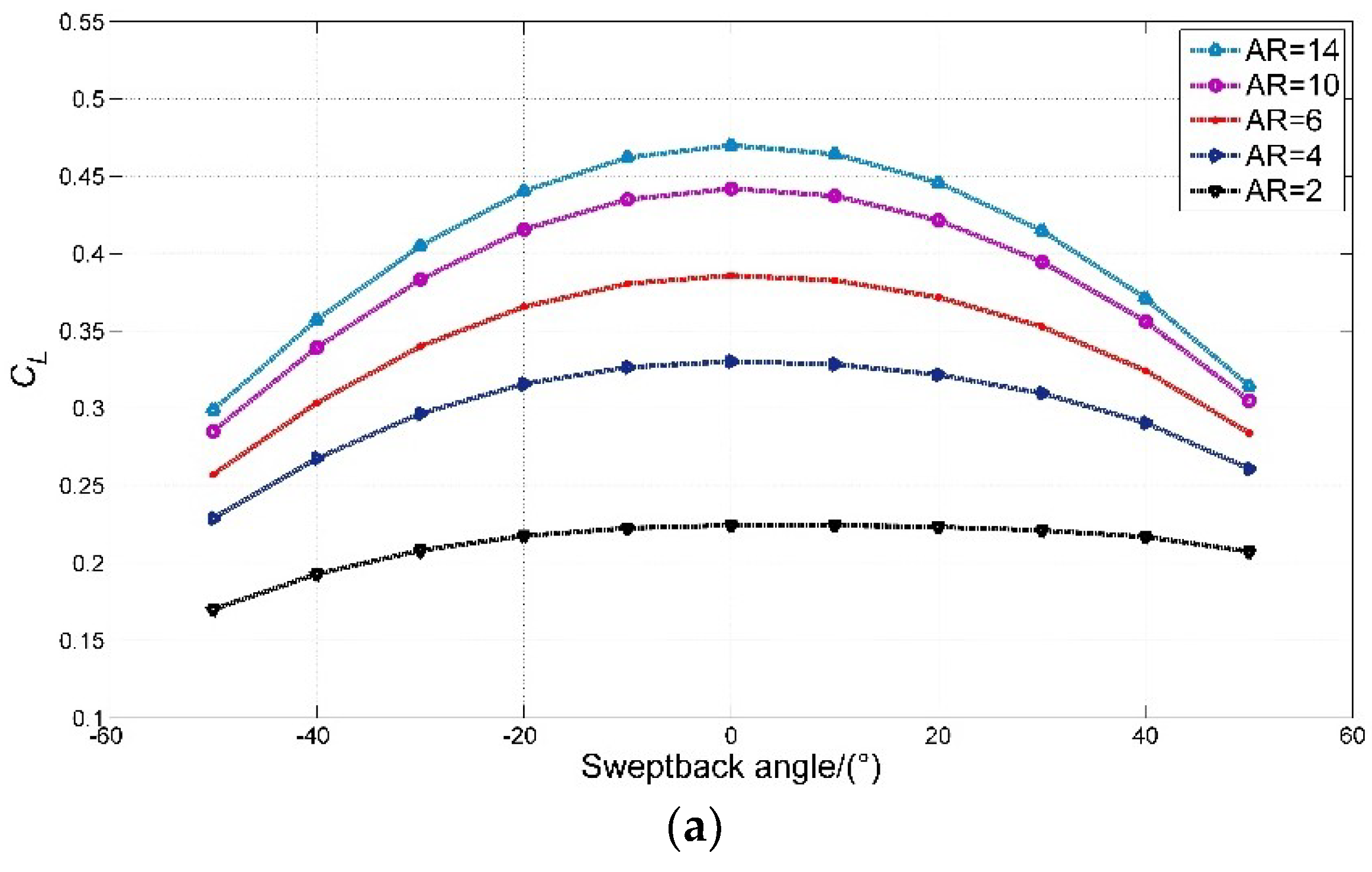
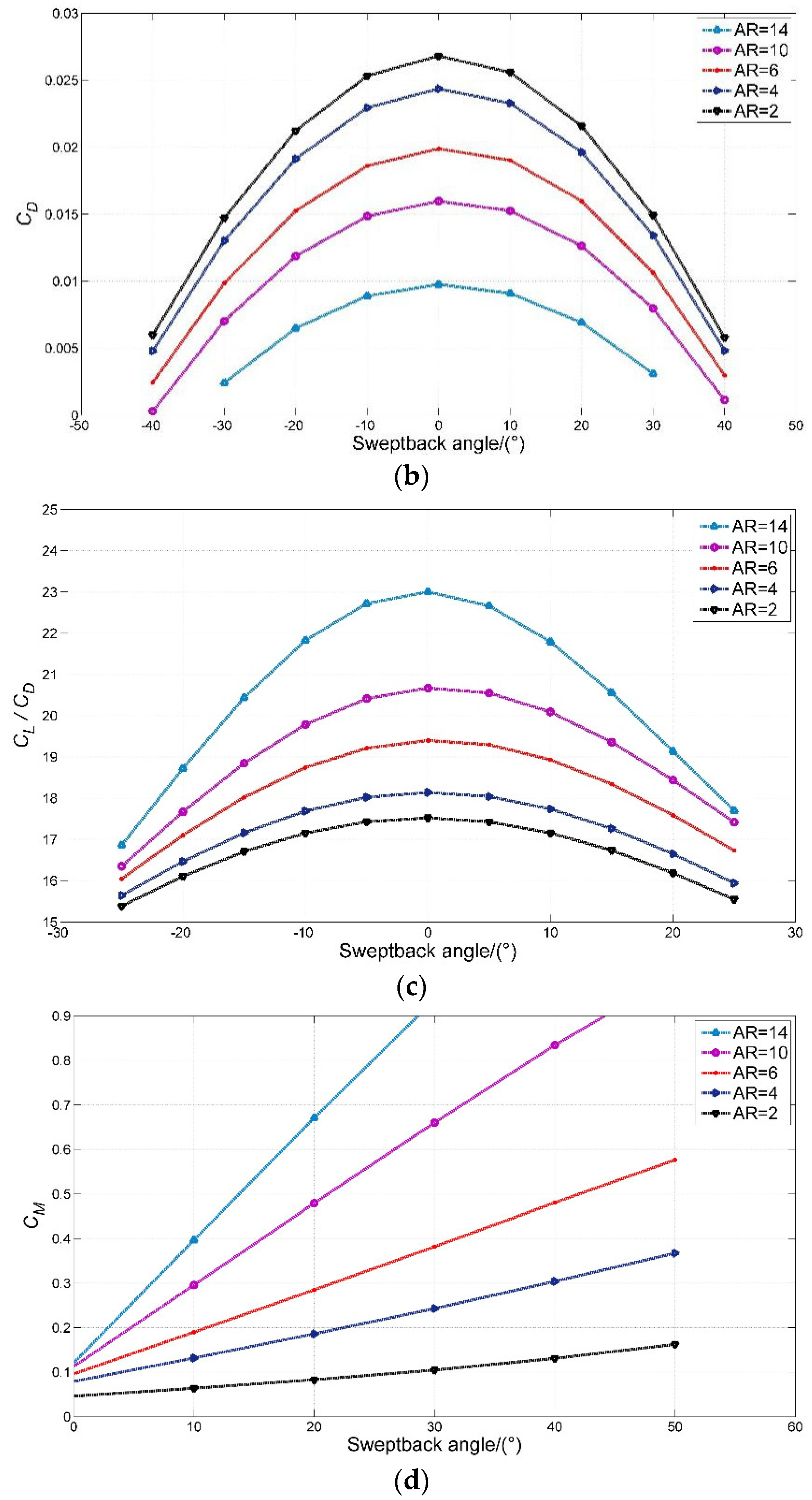
3.3. Hydrodynamic Analysis of Sweptback and Sweptforward Hydrofoils
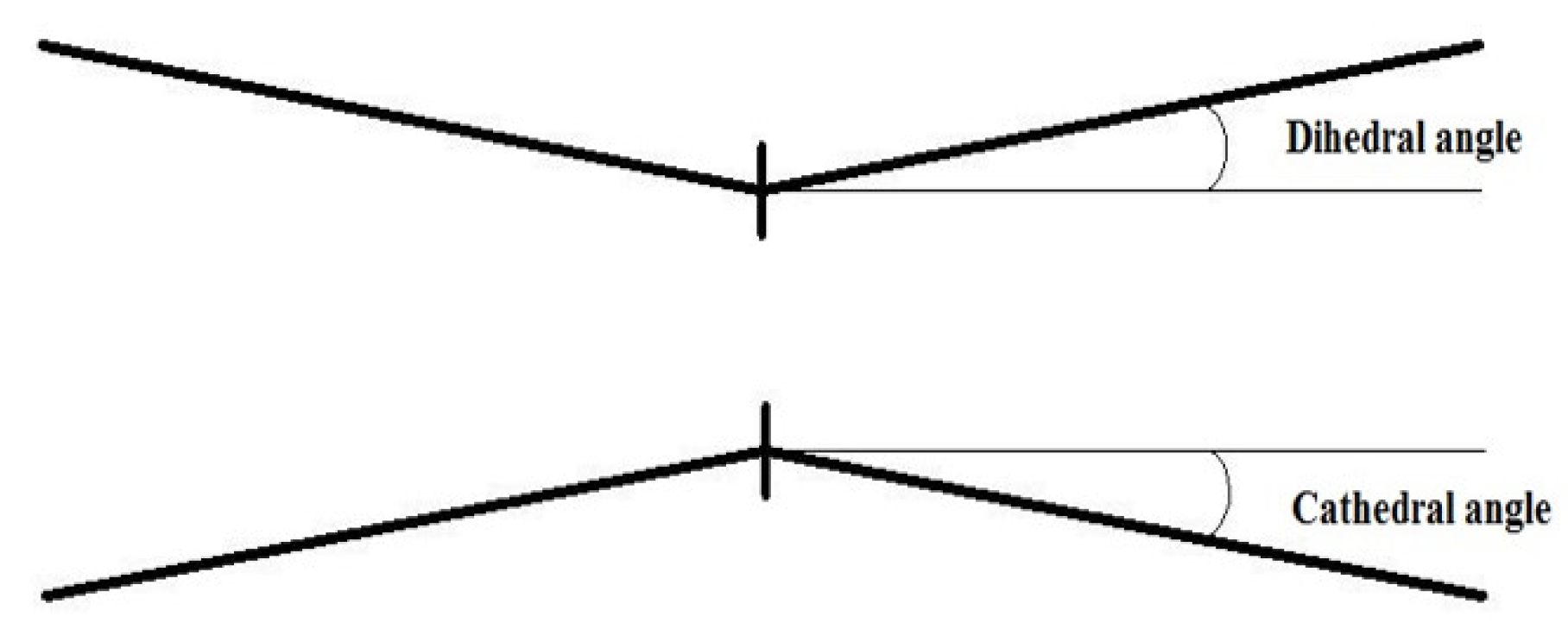
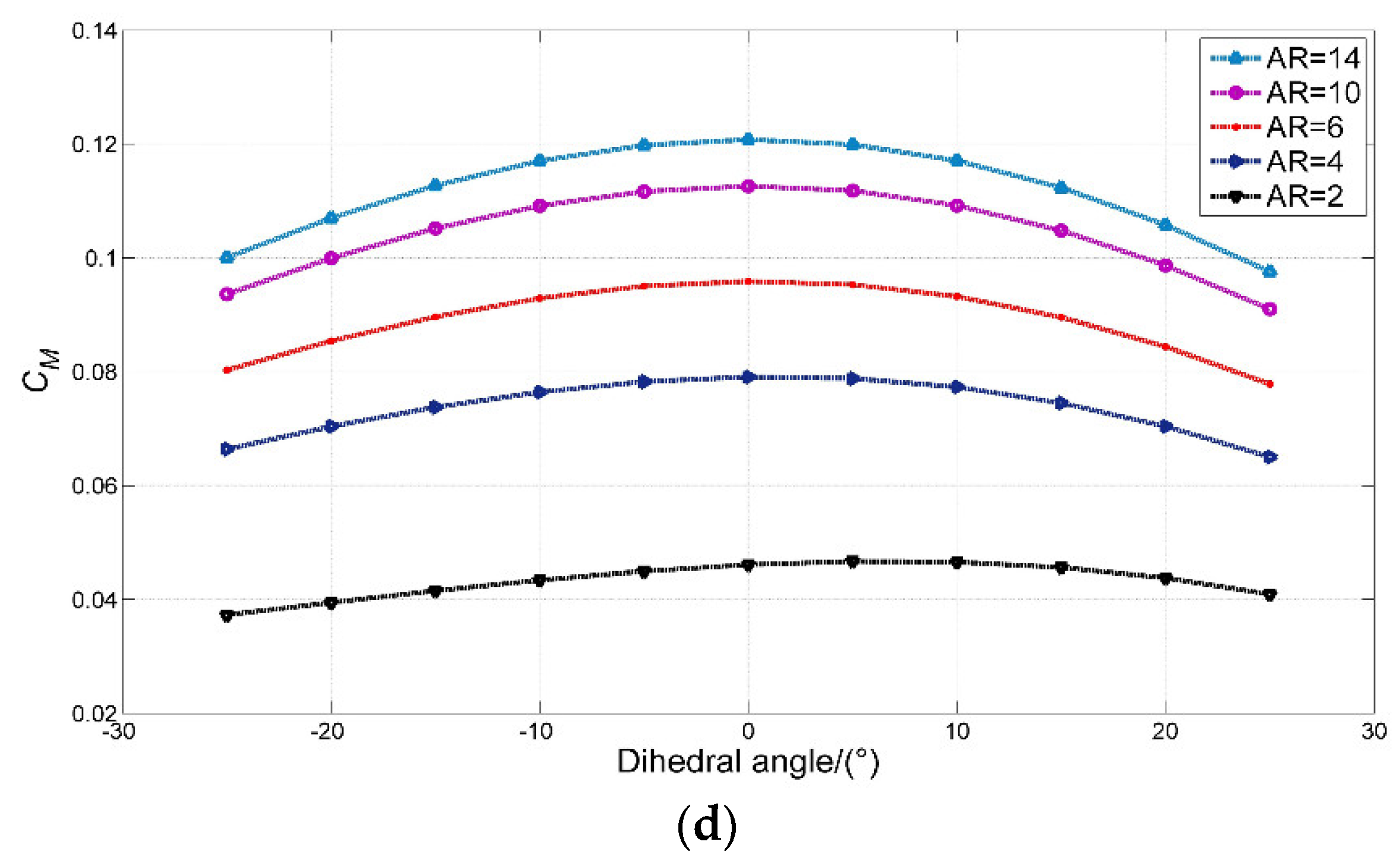
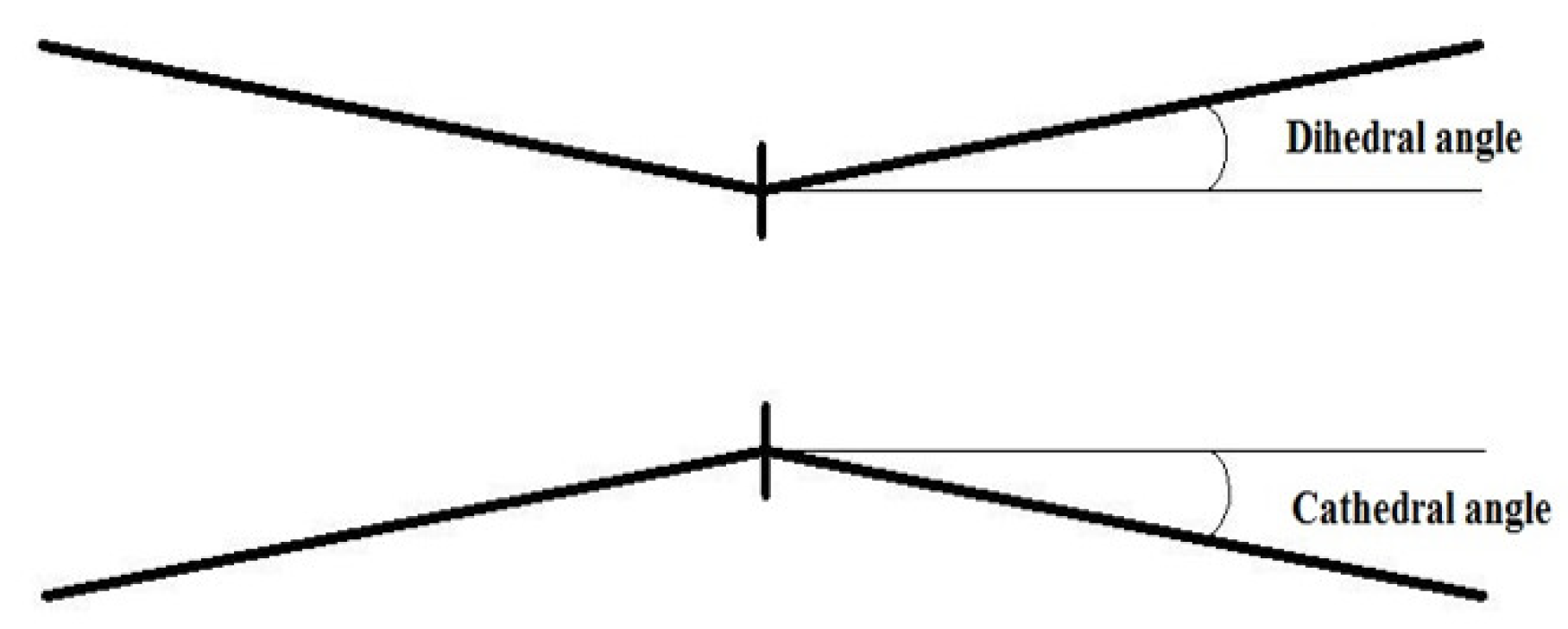
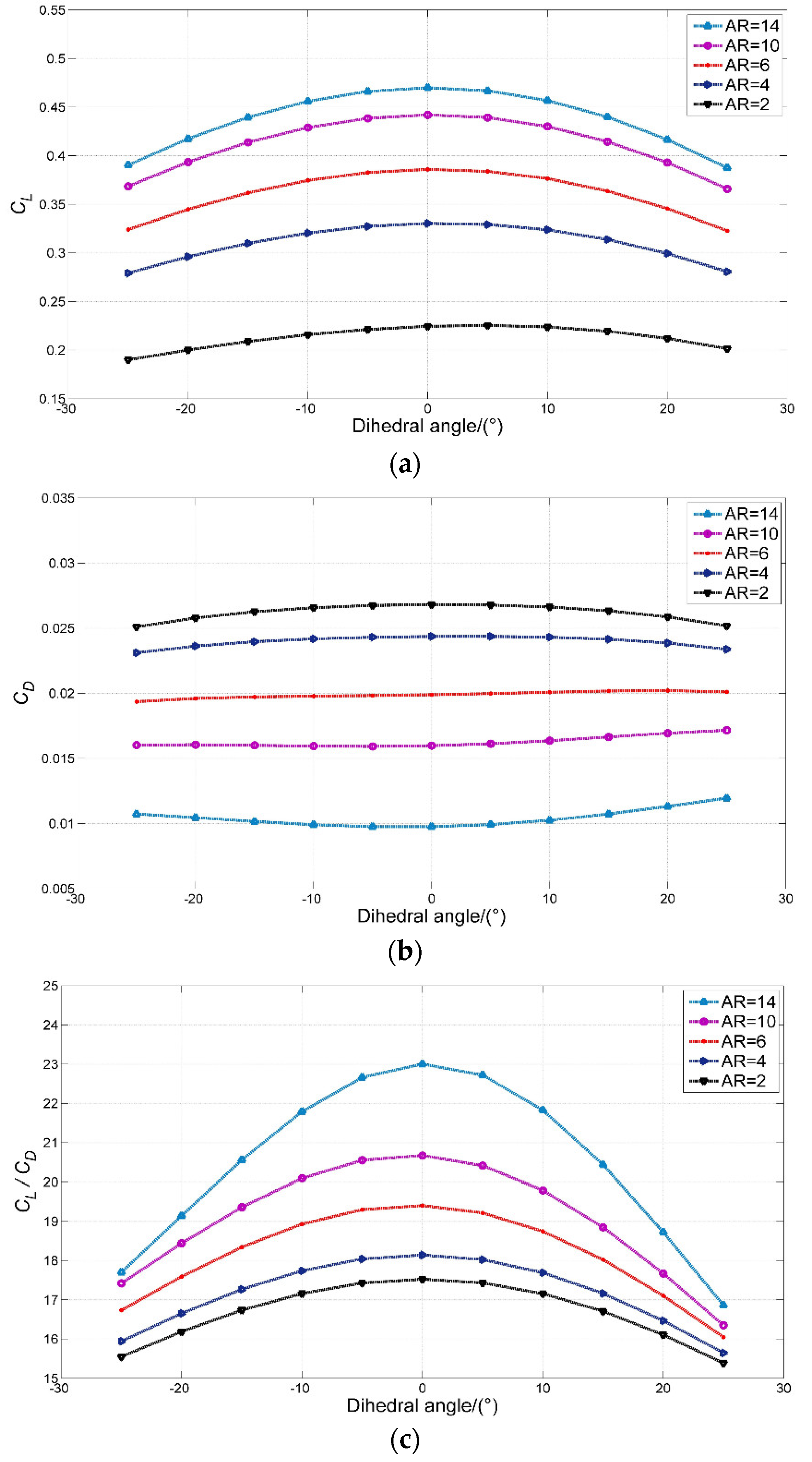
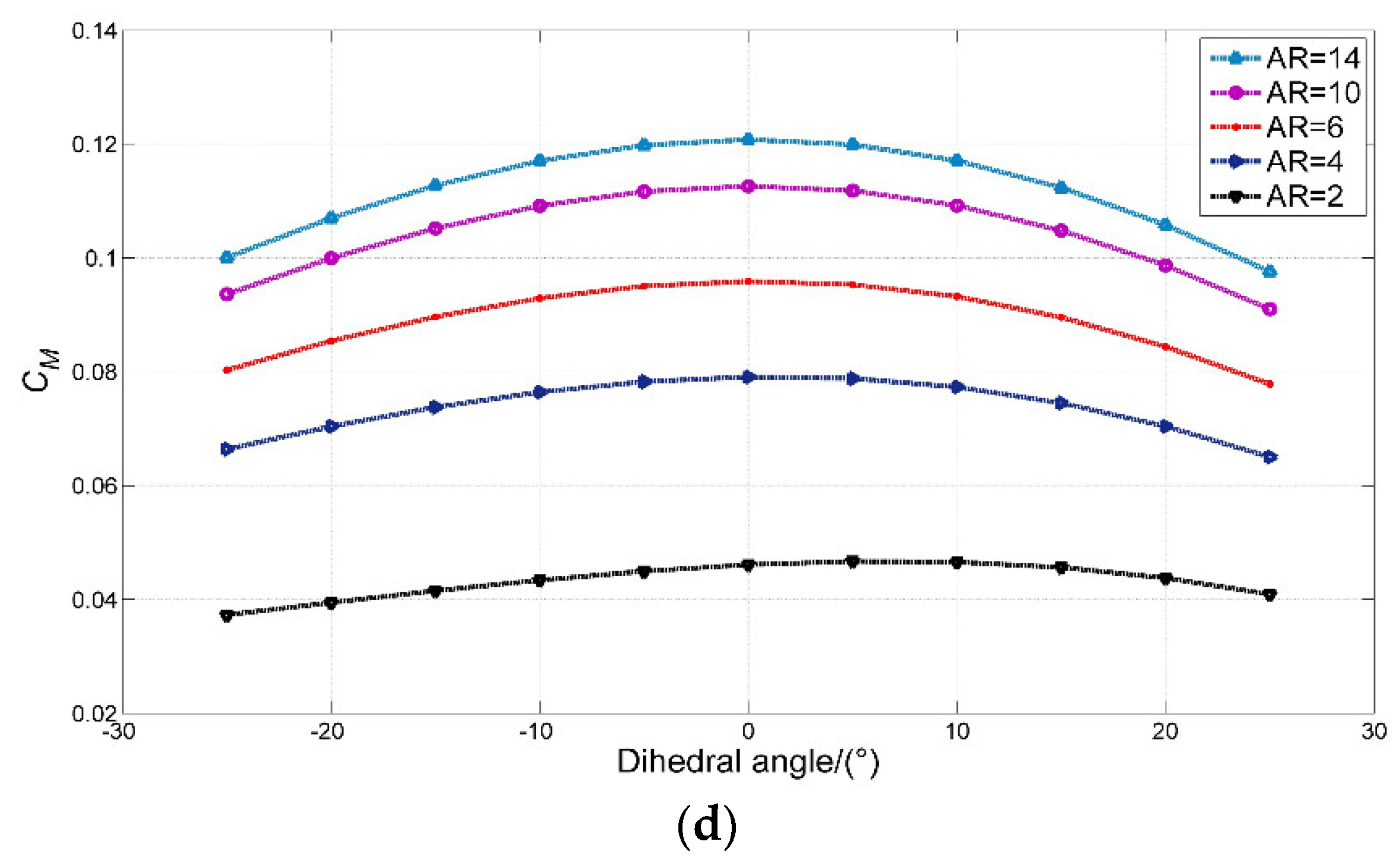
3.4. Hydrodynamic Analysis of Dihedral Hydrofoils
3.5. Results of Propeller Performance
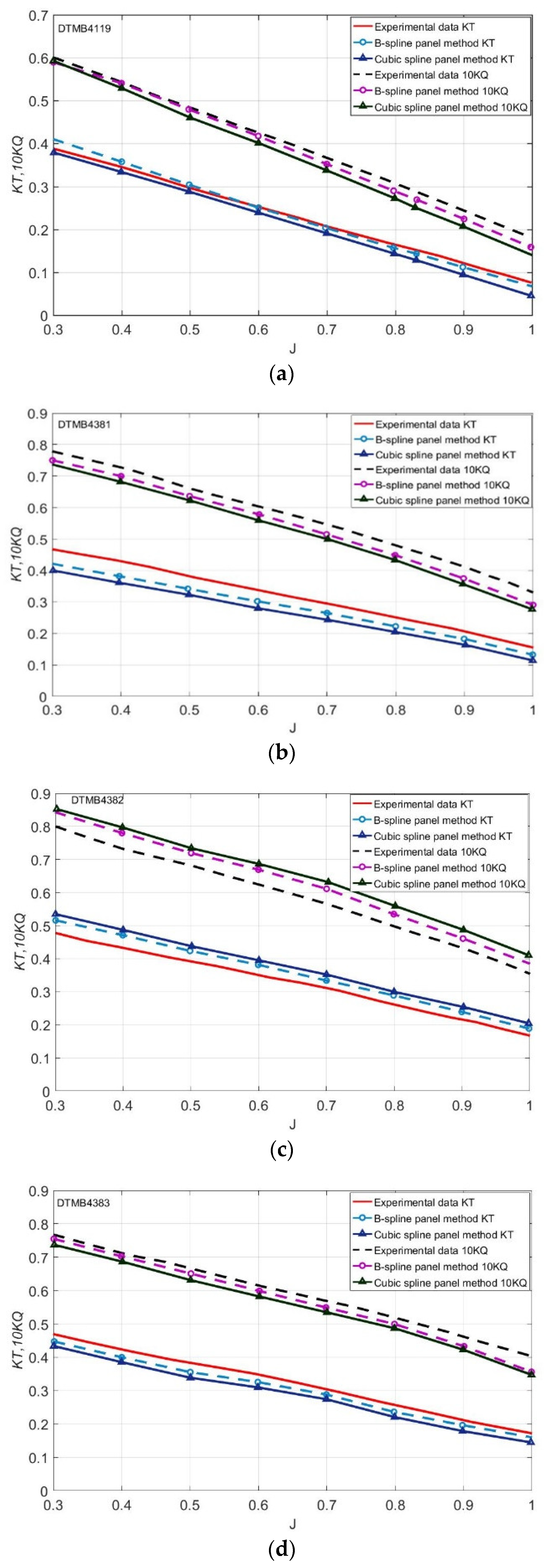
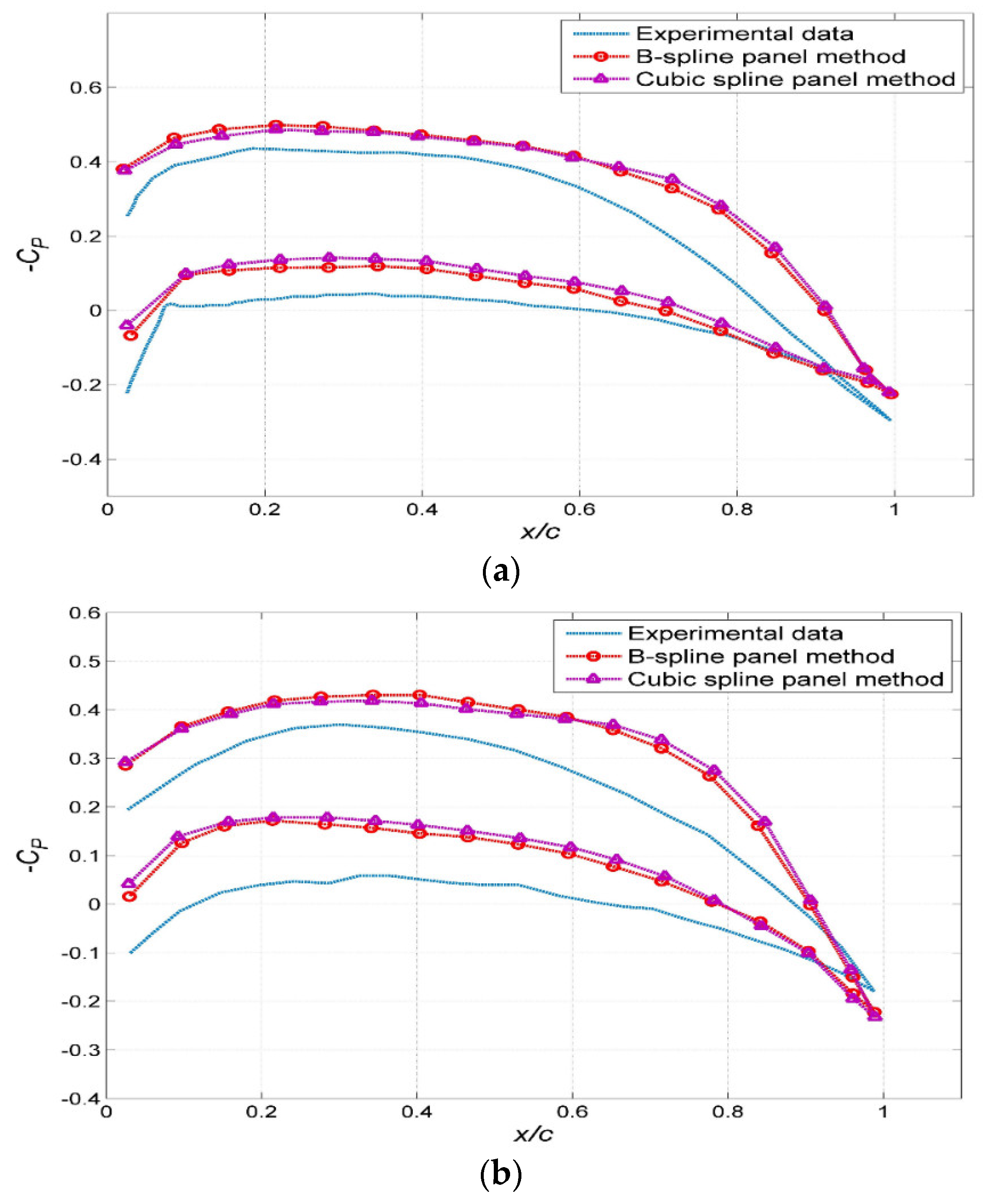
3.5.1. Validation of the Panel Method Using DTMB4119 Propeller Performance
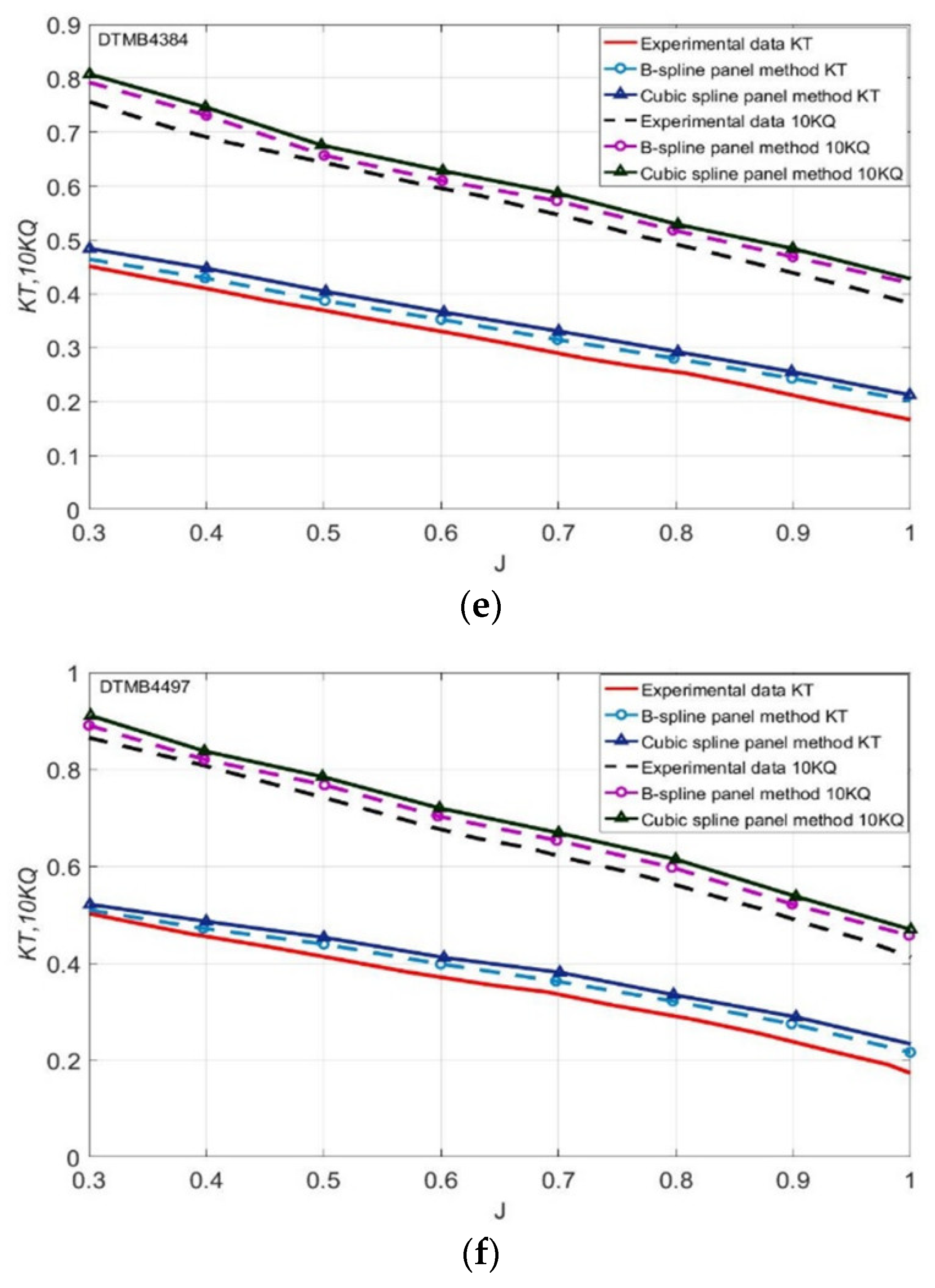
3.5.2. Results of Propeller Thrust and Toque
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A
A1. Numerical Representation of Panel Method
Numerical Modelling of the Integral Equation for Propellers
A2. The Geometric Parameters of the Propeller for Surface Panel Code (see Table A1, Table A2, Table A3, Table A4 and Table A5)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of blades, Z: 5 Hub diameter ratio: 0.2 Expanded area ratio: 0.6 Section mean line: NACA a = 0.8 Section thickness distribution: NACA66 (modified) Design advance coefficient, J = 0.833 | ||||||
| r/R | c/D | P/D | ||||
| 0.200 | 0.174 | 1.332 | 0 | 0 | 0.043 | 0.035 |
| 0.250 | 0.202 | 1.338 | 0 | 0 | 0.039 | 0.036 |
| 0.300 | 0.229 | 1.345 | 0 | 0 | 0.035 | 0.036 |
| 0.400 | 0.275 | 1.358 | 0 | 0 | 0.029 | 0.034 |
| 0.500 | 0.312 | 1.336 | 0 | 0 | 0.024 | 0.030 |
| 0.600 | 0.337 | 1.280 | 0 | 0 | 0.019 | 0.024 |
| 0.700 | 0.347 | 1.210 | 0 | 0 | 0.014 | 0.019 |
| 0.800 | 0.334 | 1.137 | 0 | 0 | 0.010 | 0.014 |
| 0.900 | 0.280 | 1.066 | 0 | 0 | 0.006 | 0.012 |
| 0.950 | 0.210 | 1.031 | 0 | 0 | 0.004 | 0.007 |
| 1.000 | 0 | 0.995 | 0 | 0 | 0.003 | 0 |
| Number of blades, Z: 5 Hub diameter ratio: 0.2 Expanded area ratio: 0.6 Section mean line: NACA a = 0.8 Section thickness distribution: NACA66 (modified) Design advance coefficient, J = 0.833 | ||||||
| r/R | c/D | P/D | ||||
| 0.200 | 0.167 | 1.451 | 0 | 0 | 0.041 | 0.046 |
| 0.250 | 0.205 | 1.441 | 2.328 | 0.008 | 0.033 | 0.039 |
| 0.300 | 0.221 | 1.436 | 4.655 | 0.025 | 0.031 | 0.035 |
| 0.400 | 0.286 | 1.423 | 9.363 | 0.038 | 0.024 | 0.032 |
| 0.500 | 0.314 | 1.352 | 13.948 | 0.048 | 0.021 | 0.030 |
| 0.600 | 0.334 | 1.281 | 18.378 | 0.067 | 0.017 | 0.025 |
| 0.700 | 0.352 | 1.185 | 22.747 | 0.078 | 0.012 | 0.018 |
| 0.800 | 0.334 | 1.112 | 27.145 | 0.081 | 0.010 | 0.016 |
| 0.900 | 0.282 | 1.024 | 31.575 | 0.090 | 0.007 | 0.014 |
| 0.950 | 0.216 | 0.973 | 33.788 | 0.093 | 0.005 | 0.012 |
| 1.000 | 0 | 0.938 | 35.000 | 0.094 | 0.004 | 0 |
| Number of blades, Z: 5 Hub diameter ratio: 0.2 Expanded area ratio: 0.6 Section mean line: NACA a = 0.8 Section thickness distribution: NACA66 (modified) Design advance coefficient, J = 0.833 | ||||||
| r/R | c/D | P/D | ||||
| 0.200 | 0.174 | 1.566 | 0 | 0 | 0.043 | 0.040 |
| 0.250 | 0.202 | 1.539 | 4.647 | 0.019 | 0.039 | 0.040 |
| 0.300 | 0.229 | 1.512 | 9.293 | 0.039 | 0.035 | 0.041 |
| 0.400 | 0.275 | 1.459 | 18.816 | 0.076 | 0.029 | 0.038 |
| 0.500 | 0.312 | 1.386 | 27.991 | 0.107 | 0.024 | 0.034 |
| 0.600 | 0.337 | 1.296 | 36.770 | 0.132 | 0.019 | 0.028 |
| 0.700 | 0.347 | 1.198 | 45.453 | 0.151 | 0.014 | 0.023 |
| 0.800 | 0.334 | 1.096 | 54.254 | 0.165 | 0.010 | 0.018 |
| 0.900 | 0.280 | 0.996 | 63.102 | 0.174 | 0.006 | 0.015 |
| 0.950 | 0.210 | 0.945 | 67.531 | 0.177 | 0.004 | 0.016 |
| 1.000 | 0 | 0.895 | 72.000 | 0.179 | 0.003 | 0 |
| Number of blades, Z: 5 Hub diameter ratio: 0.2 Expanded area ratio: 0.6 Section mean line: NACA a = 0.8 Section thickness distribution: NACA66 (modified) Design advance coefficient, J = 0.833 | ||||||
| r/R | c/D | P/D | ||||
| 0.200 | 0.174 | 1.675 | 0 | 0 | 0.043 | 0.054 |
| 0.250 | 0.202 | 1.629 | 6.961 | 0.031 | 0.039 | 0.050 |
| 0.300 | 0.229 | 1.584 | 13.921 | 0.061 | 0.035 | 0.047 |
| 0.400 | 0.275 | 1.496 | 28.426 | 0.118 | 0.029 | 0.045 |
| 0.500 | 0.312 | 1.406 | 42.152 | 0.164 | 0.024 | 0.040 |
| 0.600 | 0.337 | 1.305 | 55.199 | 0.200 | 0.019 | 0.033 |
| 0.700 | 0.347 | 1.199 | 68.098 | 0.226 | 0.014 | 0.027 |
| 0.800 | 0.334 | 1.086 | 81.283 | 0.245 | 0.010 | 0.023 |
| 0.900 | 0.280 | 0.973 | 94.624 | 0.255 | 0.006 | 0.019 |
| 0.950 | 0.210 | 0.916 | 101.300 | 0.257 | 0.004 | 0.020 |
| 1.000 | 0 | 0.859 | 108.000 | 0.257 | 0.003 | 0 |
| Number of blades, Z: 5 Hub diameter ratio: 0.2 Expanded area ratio: 0.6 Section mean line: NACA a = 0.8 Section thickness distribution: NACA66 (modified) Design advance coefficient, J = 0.833 | ||||||
| r/R | c/D | P/D | ||||
| 0.200 | 0.178 | 1.450 | 0 | 0 | 0.043 | 0.042 |
| 0.250 | 0.217 | 1.445 | 2.272 | 0 | 0.036 | 0.037 |
| 0.300 | 0.242 | 1.432 | 4.675 | 0 | 0.032 | 0.034 |
| 0.400 | 0.298 | 1.427 | 9.312 | 0 | 0.024 | 0.031 |
| 0.500 | 0.314 | 1.365 | 13.941 | 0 | 0.021 | 0.029 |
| 0.600 | 0.332 | 1.291 | 18.732 | 0 | 0.016 | 0.022 |
| 0.700 | 0.351 | 1.182 | 22.578 | 0 | 0.014 | 0.017 |
| 0.800 | 0.329 | 1.119 | 27.533 | 0 | 0.012 | 0.015 |
| 0.900 | 0.279 | 1.015 | 31.534 | 0 | 0.009 | 0.012 |
| 0.950 | 0.209 | 0.969 | 34.783 | 0 | 0.007 | 0.010 |
| 1.000 | 0 | 0.917 | 36.000 | 0 | 0.005 | 0 |
References
- Hess, J.L.; Smith AM, O. Calculation of potential flow about arbitrary bodies. Prog. Aerosp. Sci. 1967, 8, 1–138. [Google Scholar] [CrossRef]
- Brandner, P. Calculation Results for the 22nd ITTC Propulsor Committee Workshop on Propeller RANS/PANEL Methods Steady Panel Method Analysis of DTMB 4119 Propeller. Available online: https://www.researchgate.net/publication/237730350_Calculation_Results_for_the_22nd_ITTC_Propulsor_Committee_Workshop_on_Propeller_RANSPANEL_Methods_Steady_Panel_Method_Analysis_of_DTMB_4119_Propeller (accessed on 8 February 2019).
- Baltazar, J.; Campos, J.; Bosschers, J. A Comparison of Panel Method and RANS Calculations for a Ducted Propeller System in Open-Water. In Proceedings of the International Symposium on Marine Propulsors, Launceston, Tasmania, Australia, 5–8 May 2013; pp. 334–343. [Google Scholar]
- Hozhabrossadati, S.M.; Challamel, N.; Rezaiee-Pajand, M.; Sani, A.A. Application of Green’s function method to bending of stress gradient nanobeams. Int. J. Solids Struct. 2018, 143, 209–217. [Google Scholar] [CrossRef]
- Kesour, K.; Atalla, N. A hybrid patch transfer-Green functions method to solve transmission loss problems of flat single and double walls with attached sound packages. J. Sound Vib. 2018, 429, 1–17. [Google Scholar] [CrossRef]
- Esfahani, J.A.; Vahidhosseini, S.M.; Barati, E. Three-dimensional analytical solution for transport problem during convection drying using Green’s function method (GFM). Appl. Therm. Eng. 2015, 85, 264–277. [Google Scholar] [CrossRef]
- Datta, R.; Sen, D. A B-spline-based method for radiation and diffraction problems. Ocean Eng. 2006, 33, 2240–2259. [Google Scholar] [CrossRef]
- Datta, R.; Rodrigues, J.M. Guedes Soares C. Study of the motions of fishing vessels by a time domain panel method. Ocean Eng. 2011, 38, 782–792. [Google Scholar] [CrossRef]
- Belibassakis, K.A.; Politis, G.K.; Thens, A. Analysis of Unsteady Propeller Performance by a Surface Vorticity Panel Method. Ship Technol. Res. 2002, 35, 342–355. [Google Scholar]
- Katz, J.; Weihs, D. Wake Rollup and the Kutta Condition for Airfoils Oscillating at High Frequency. AIAA J. 2015, 19, 1604–1606. [Google Scholar] [CrossRef]
- Kinnas, S.A.; Hsin, C. Boundary element method for the analysis of the unsteady flow around extreme propeller geometries. AIAA J. 1992, 30, 688–696. [Google Scholar] [CrossRef]
- Hartmann, S. A remark on the application of the Newton-Raphson method in non-linear finite element analysis. Comput. Mech. 2005, 36, 100–116. [Google Scholar] [CrossRef]
- Srivastava, S.; Roychowdhury, J. Independent and Interdependent Latch Setup/Hold Time Characterization via Newton–Raphson Solution and Euler Curve Tracking of State-Transition Equations. IEEE Trans. Comput. Aided Des. Integr. Circ. Syst. 2008, 27, 817–830. [Google Scholar] [CrossRef]
- Mantia, M.L.; Dabnichki, P. Unsteady panel method for flapping foil. Eng. Anal. Bound. Elem. 2009, 33, 572–580. [Google Scholar] [CrossRef]
- Eça, L.; Vaz, G.B.; Campos, J.F.D. Verification Study of Low and Higher-Order Potential Based Panel Methods for 2D Foils. In Proceedings of the AIAA Fluid Dynamics Conference and Exhibit, St. Louis, MI, USA, 24–26 June 2002; pp. 197–208. [Google Scholar]
- Kanemaru, T.; Ando, J. Numerical analysis of cavitating propeller and pressure fluctuation on ship stern using a simple surface panel method “SQCM”. J. Mar. Sci. Technol. 2013, 18, 294–309. [Google Scholar] [CrossRef]
- Tarafder, M.S.; Suzuki, K. Numerical calculation of free-surface potential flow around a ship using the modified Rankine source panel method. Ocean Eng. 2008, 35, 536–544. [Google Scholar] [CrossRef]
- Huang, Q.; Huang, Y.; Hu, W. Bezier Interpolation for 3-D Freehand Ultrasound. IEEE Trans. Hum. Mach. Syst. 2015, 45, 385–392. [Google Scholar] [CrossRef]
- Catmull, E.; Clark, J. Recursively generated B-spline surfaces on arbitrary topological meshes. Comput. Aided Des. 2010, 10, 350–355. [Google Scholar] [CrossRef]
- Chen, C.W.; Kang, D.D.; Leng, J.X.; Lin, H.T.; Wang, J.; Jiao, L. Numerical analysis on the wake field of fast container ship stern with novel propeller duct. In Proceedings of the International Symposium on Fluid Machinery and Fluid Engineering—IET, Wuhan, China, 22 October 2014; pp. 1–7. [Google Scholar]
- Chen, C.W.; Ning, P. Prediction and analysis of 3D hydrofoil and propeller under potential flow using panel method. EDP Sciences 2016, 77, 01013. [Google Scholar] [CrossRef]
- Lee, C.; Koo, D.; Zingg, D.W. Comparison of B-spline surface and free-form deformation geometry control for aerodynamic optimization. AIAA J. 2017, 55, 228–240. [Google Scholar] [CrossRef]
- Chen, C.W.; Tsai, J.S.K.J.F. Modeling and Simulation of an AUV Simulator With Guidance System. IEEE J. Ocean. Eng. 2013, 38, 211–225. [Google Scholar] [CrossRef]
- Kim, G.-D.; Lee, C.-S.; Kerwin, J.E. A B-spline higher order panel method for analysis of steady flow around marine propellers. Ocean Eng. 2007, 34, 2045–2060. [Google Scholar] [CrossRef]
- Kim, G.; Ahn, B.; Kim, J.; Lee, C. Improved hydrodynamic analysis of marine propellers using a B-spline-based higher-order panel method. J. Mar. Sci. Technol. 2015, 20, 670–678. [Google Scholar] [CrossRef]
- Lee, C.-S.; Kerwin, J.E. A B-spline higher order panel method applied to two-dimensional lifting problem. J. Ship Res. 2003, 47, 290–298. [Google Scholar]
- Hsin, C.Y.; Kerwin, J.E.; Newman, J.N. A higher-order panel method based on B-splines. In Proceedings of the 6th International Conference on Numerical Ship Hydrodynamics, Iowa City, IA, USA, 2–5 August 1993. [Google Scholar]
- Plotkin, A.; Katz, J. Low-Speed Aerodynamics; Cambridge University Press: Cambridge, UK, 2001. [Google Scholar]
- Kerwin, J.E.; Hadler, J.B. Principles of Naval Architecture Series: Propulsion; The Society of Naval Architects and Marine Engineers (SNAME): Alexandria, VA, USA, 2010. [Google Scholar]
- Su, Y.; Kim, S.; Kinnas, S.A. Prediction of propeller-induced hull pressure fluctuations via a potential-based method: Study of the effects of different wake alignment methods and of the rudder. J. Mar. Sci. Eng. 2018, 6, 52. [Google Scholar] [CrossRef]
- Kanemaru, T.; Ando, J. Calculation of Propeller Cavitation and Pressure Fluctuation on Ship Stern Using a Simple Surface Panel Method. J. Soc. Naval Arch. Japan 2009, 10, 1–10. [Google Scholar]
- Politis, G.K. Simulation of unsteady motion of a propeller in a fluid including free wake modeling. Eng. Anal. Bound. Elem. 2004, 28, 633–653. [Google Scholar] [CrossRef]
- von Doenhoff, H.A.A. Theory of Wing Sections: Including a Summary of Airfoil Data; Dover Publications: New York, NY, USA, 1959. [Google Scholar]
- Lee, S.J.; Jang, Y.G. Control of flow around a NACA 0012 airfoil with a micro-riblet film. J. Fluids Struct. 2005, 20, 659–672. [Google Scholar] [CrossRef]
- Wang Yang, Wu Weiwei, Li Zhiguo, Investigation on Aerodynamic Characteristics of Forward/Backward Swept Wing in Ground Effect. Adv. Aeronaut. Sci. Eng. 2015, 6, 412–418.
- Greeley, D.S.; Kerwin, J.E. Numerical methods for propeller design and analysis in steady flow. Trans. SNAME 1982, 90, 415–453. [Google Scholar]
- The Propulsion Committee. Final Report and Recommendations to the 20th ITTC; ITTC: San Francisco, CA, USA, 1993; Volume 5, pp. 111–142. [Google Scholar]
- Jessup, S.D. An Experimental Investigation of Viscous Aspects of Propeller Blade Flow. Ph.D. Thesis, The Catholic University of America, Washington, DC, USA, 1989. [Google Scholar]
- Tachmindji, A.J. The Potential Problem of the Optimum Propeller with Finite Number of Blades Operating in a Cylindrical Duct; Navy Department, David Taylor Model Basin: Bethesda, MD, USA, 1958. [Google Scholar]
- Gaschler, M.; Abdel-Maksoud, M. Computation of hydrodynamic mass and damping coefficients for a cavitating marine propeller flow using a panel method. J. Fluids Struct. 2014, 49, 574–593. [Google Scholar] [CrossRef]
- Koyama, K. Relation between the lifting surface theory and the lifting line theory in the design of an optimum screw propeller. J. Mar. Sci. Technol. 2013, 18, 145–165. [Google Scholar] [CrossRef]
- Pyo, S.; Kinnas, S.A. Propeller wake sheet roll-up modeling in three dimensions. J. Ship Res. 1997, 41, 81–92. [Google Scholar]
- Carmichael, R.; Erickson, L. PAN AIR—A higher order panel method for predicting subsonic or supersonic linear potential flows about arbitrary configurations. In Proceedings of the 14th Fluid and Plasma Dynamics Conference, Palo Alto, CA, USA, 23–25 June 1981. [Google Scholar]
- Ramsey, W.D. Boundary Integral Methods for Lifting Bodies with Vortex Wakes. Ph.D. Thesis, Department of Ocean Engineering, MIT, Cambridge, MA, USA, 1995. [Google Scholar]



| Number of blades, Z: 3 Hub diameter ratio: 0.2 Expanded area ratio: 0.6 Section mean line: NACA a = 0.8 Section thickness distribution: NACA66 (modified) Design advance coefficient, J = 0.833 | ||||||
| r/R | c/D | P/D | ||||
| 0.200 | 0.321 | 1.105 | 0 | 0 | 0.200 | 0.014 |
| 0.250 | 0.343 | 1.103 | 0 | 0 | 0.180 | 0.019 |
| 0.300 | 0.361 | 1.102 | 0 | 0 | 0.161 | 0.023 |
| 0.400 | 0.405 | 1.098 | 0 | 0 | 0.113 | 0.023 |
| 0.500 | 0.443 | 1.093 | 0 | 0 | 0.093 | 0.021 |
| 0.600 | 0.463 | 1.087 | 0 | 0 | 0.074 | 0.020 |
| 0.700 | 0.465 | 1.083 | 0 | 0 | 0.052 | 0.020 |
| 0.800 | 0.436 | 1.081 | 0 | 0 | 0.043 | 0.019 |
| 0.900 | 0.363 | 1.078 | 0 | 0 | 0.032 | 0.018 |
| 0.950 | 0.286 | 1.077 | 0 | 0 | 0.034 | 0.016 |
| 1.000 | 0.031 | 1.075 | 0 | 0 | 0.001 | 0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.-W.; Li, M. Improved Hydrodynamic Analysis of 3-D Hydrofoil and Marine Propeller Using the Potential Panel Method Based on B-Spline Scheme. Symmetry 2019, 11, 196. https://doi.org/10.3390/sym11020196
Chen C-W, Li M. Improved Hydrodynamic Analysis of 3-D Hydrofoil and Marine Propeller Using the Potential Panel Method Based on B-Spline Scheme. Symmetry. 2019; 11(2):196. https://doi.org/10.3390/sym11020196
Chicago/Turabian StyleChen, Chen-Wei, and Ming Li. 2019. "Improved Hydrodynamic Analysis of 3-D Hydrofoil and Marine Propeller Using the Potential Panel Method Based on B-Spline Scheme" Symmetry 11, no. 2: 196. https://doi.org/10.3390/sym11020196
APA StyleChen, C.-W., & Li, M. (2019). Improved Hydrodynamic Analysis of 3-D Hydrofoil and Marine Propeller Using the Potential Panel Method Based on B-Spline Scheme. Symmetry, 11(2), 196. https://doi.org/10.3390/sym11020196