Neural Networks Application for Processing of the Data from the FMICW Radars



Abstract
:1. Introduction
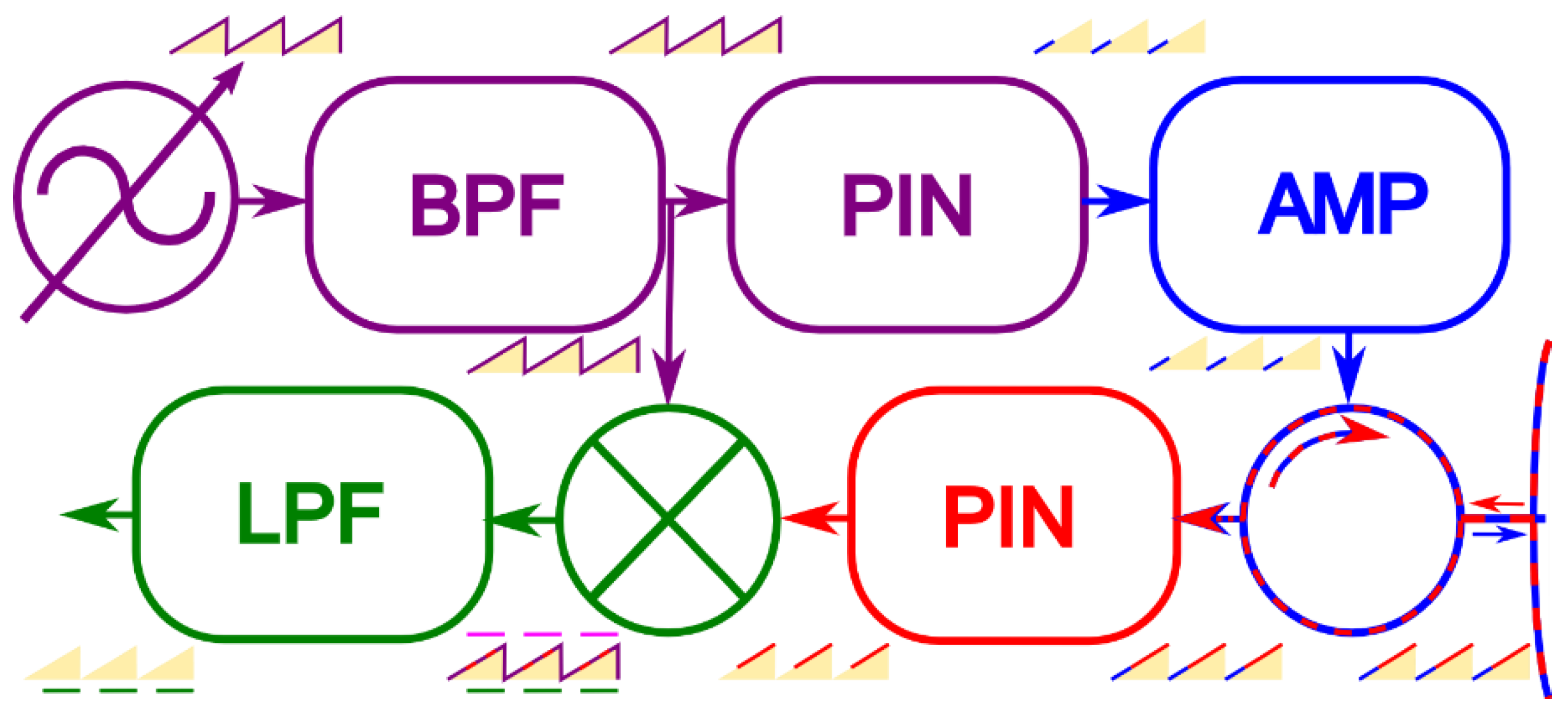
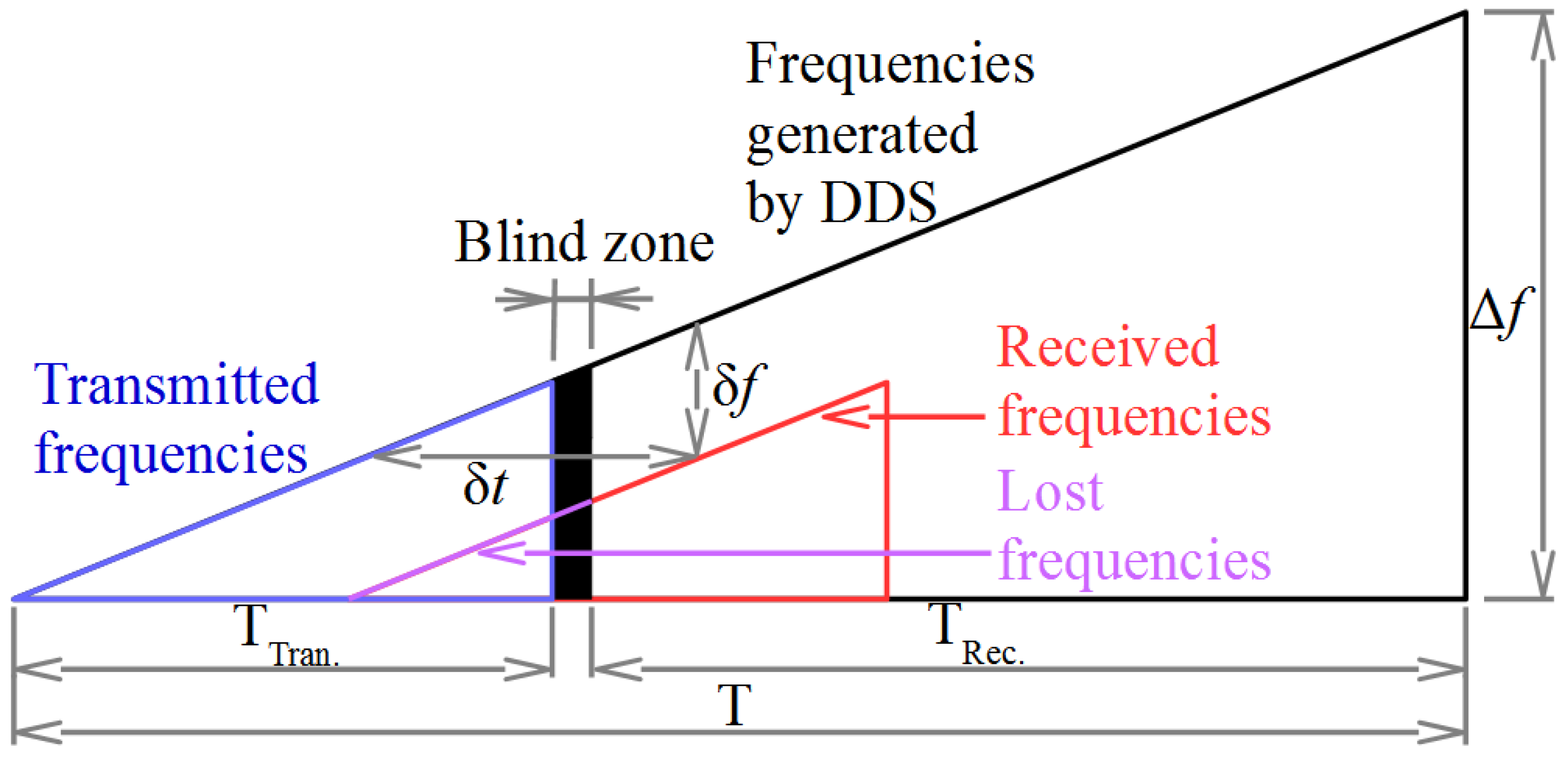
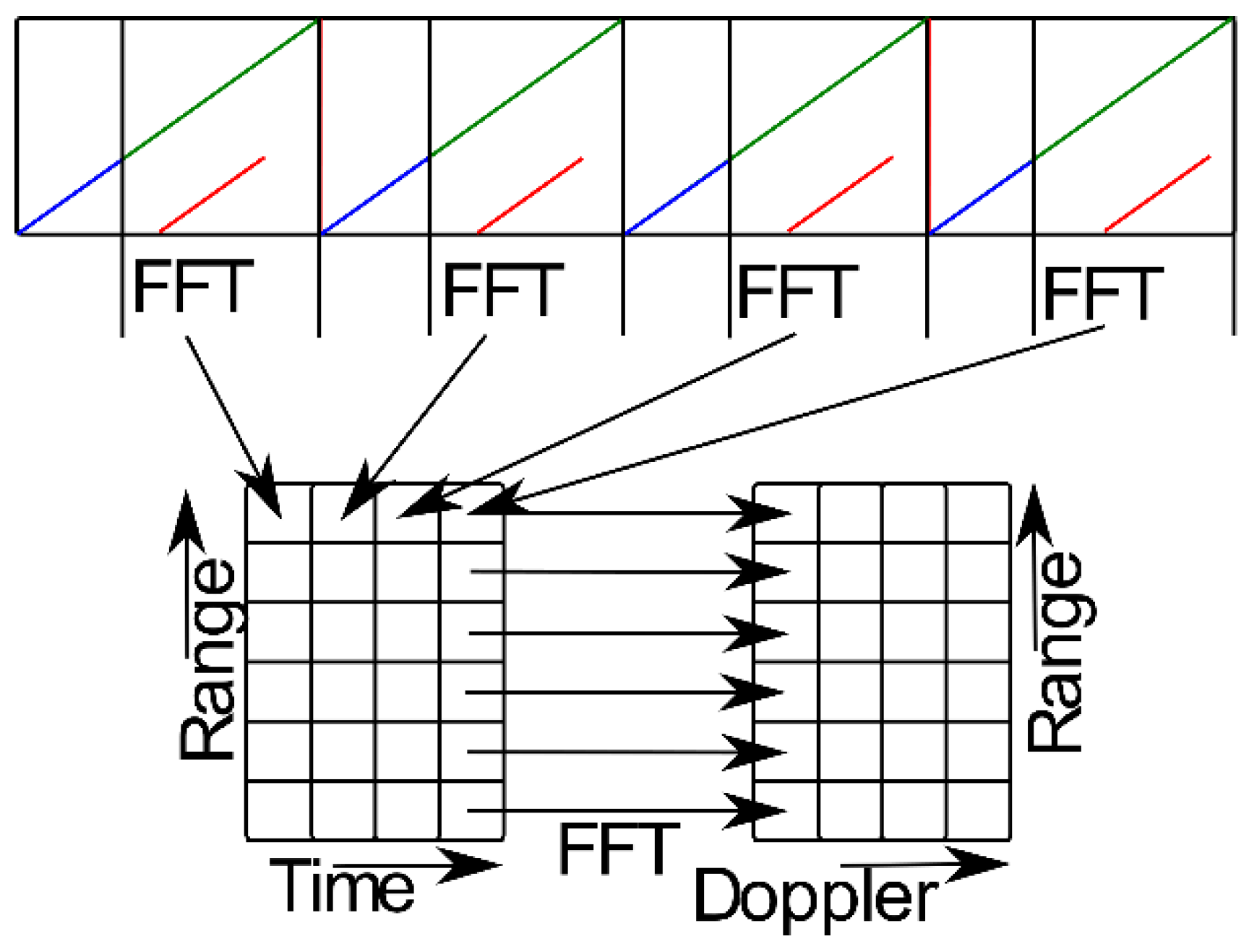
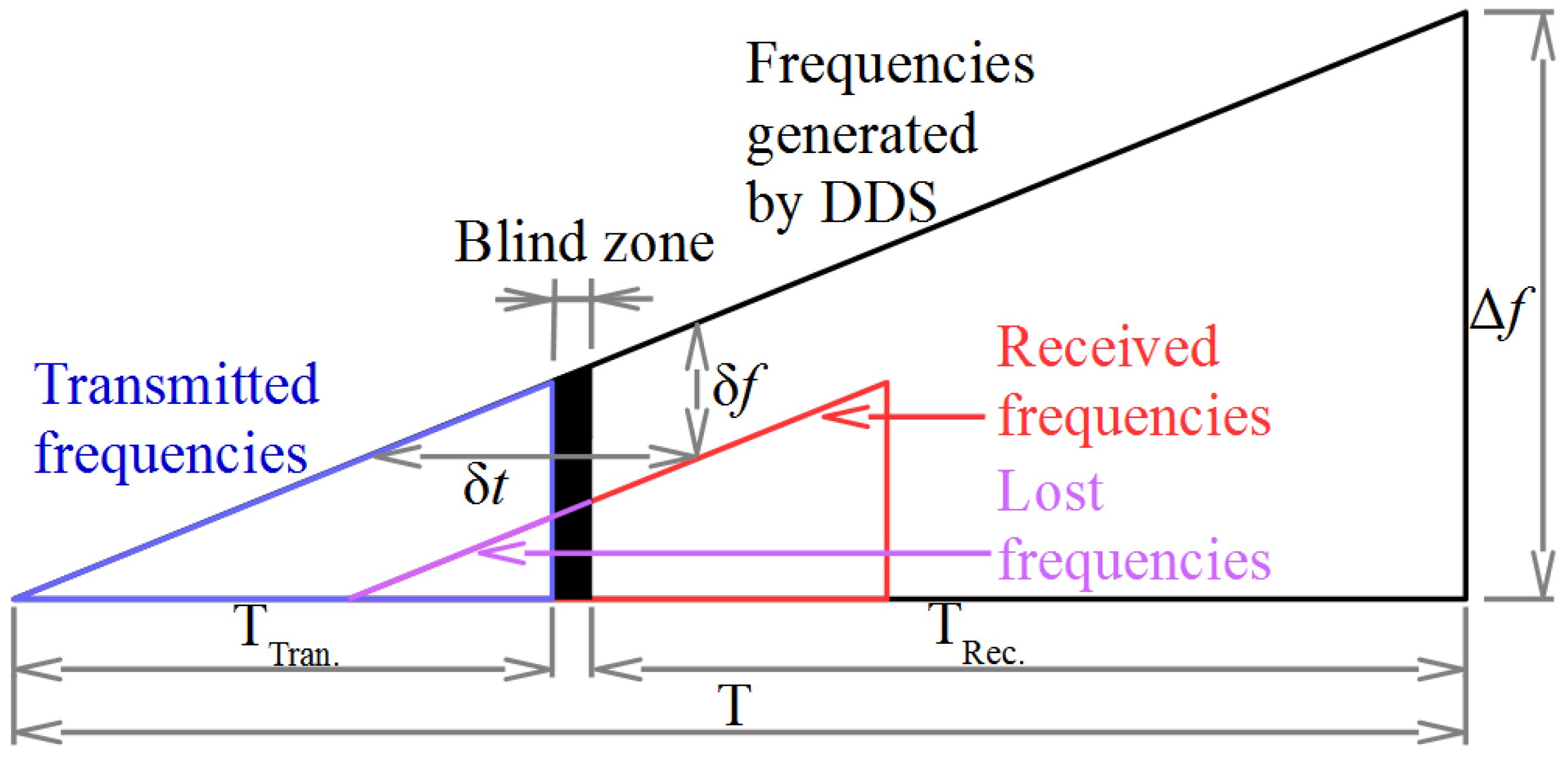
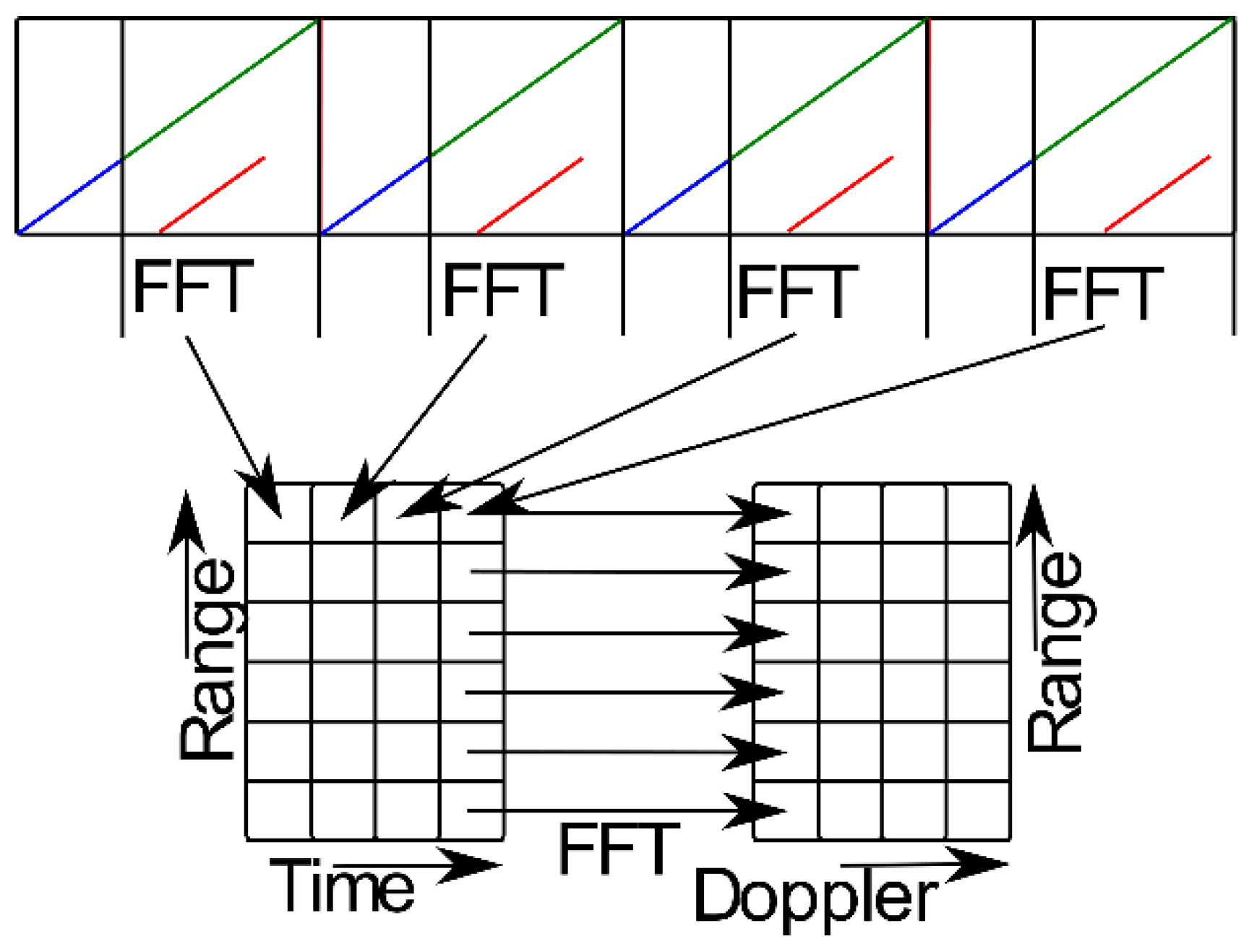
2. FMICW Radar Description
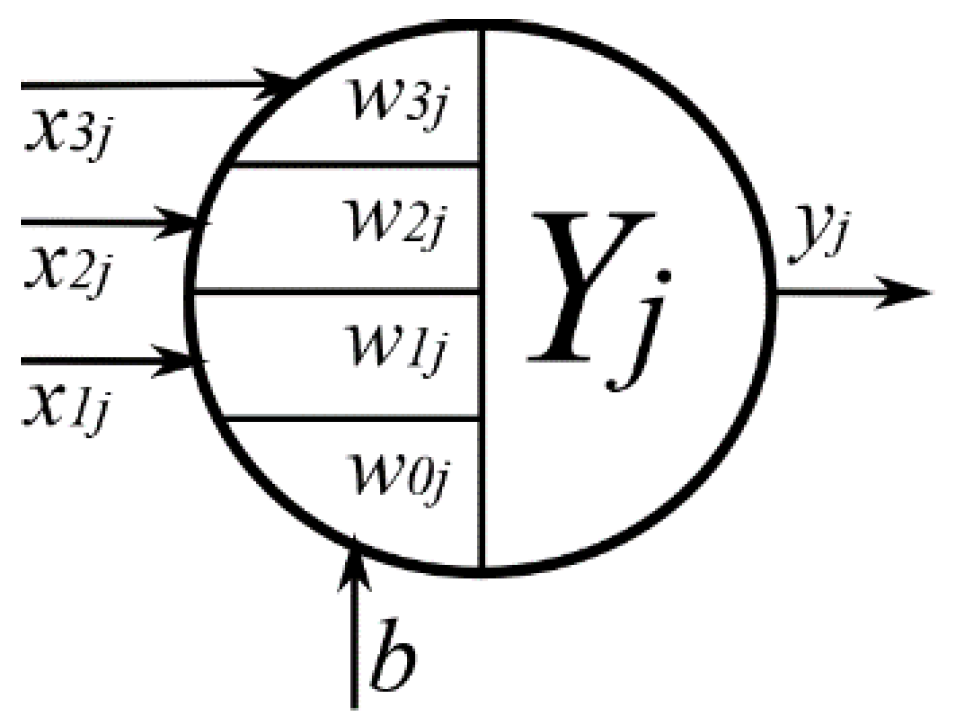
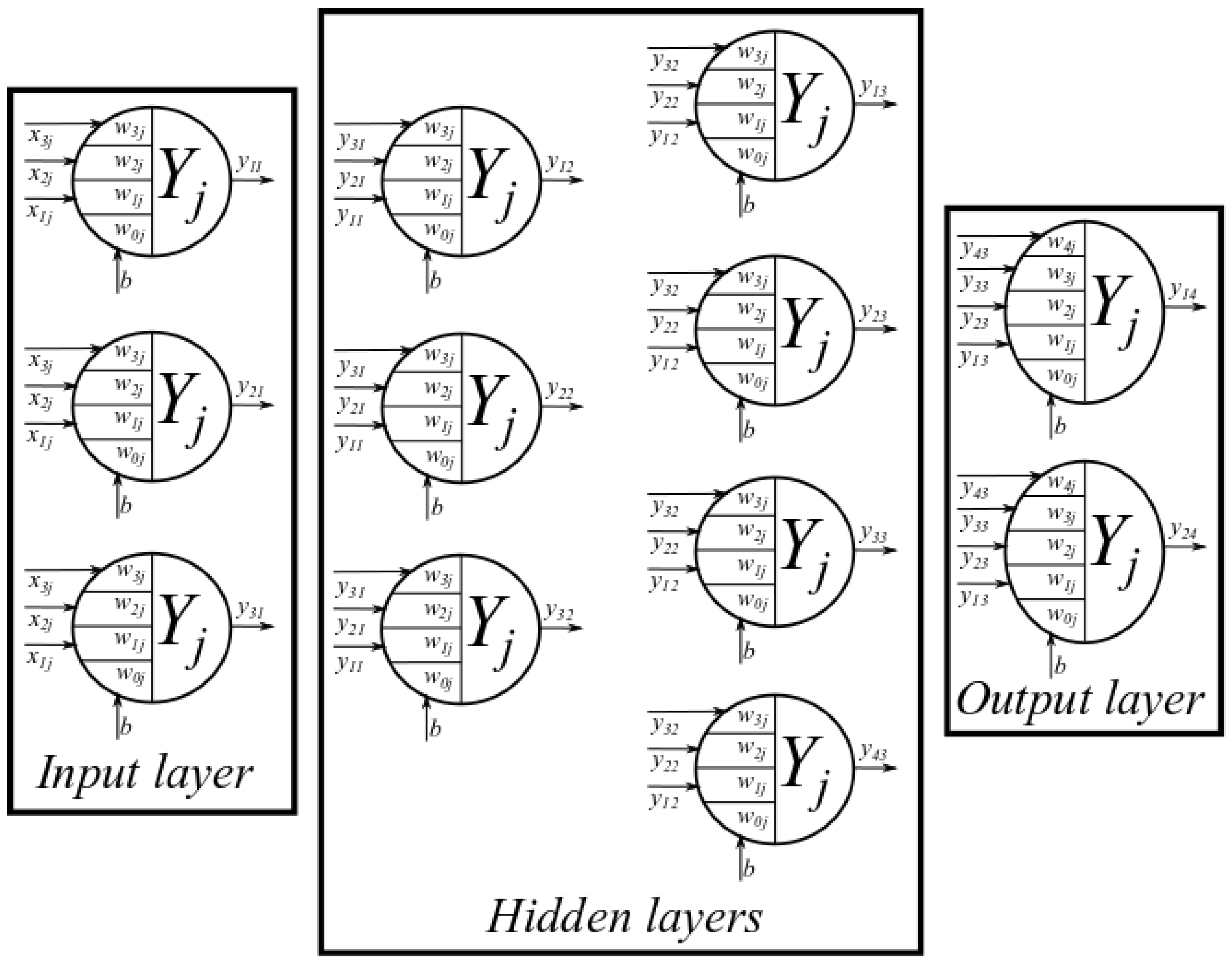
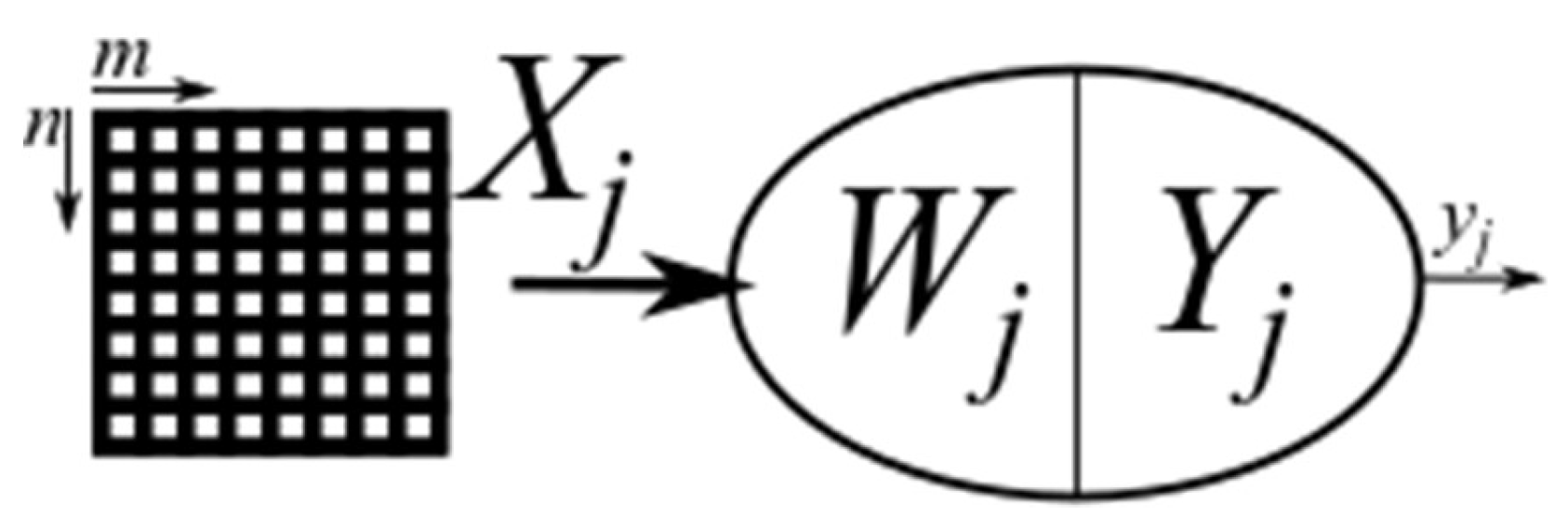
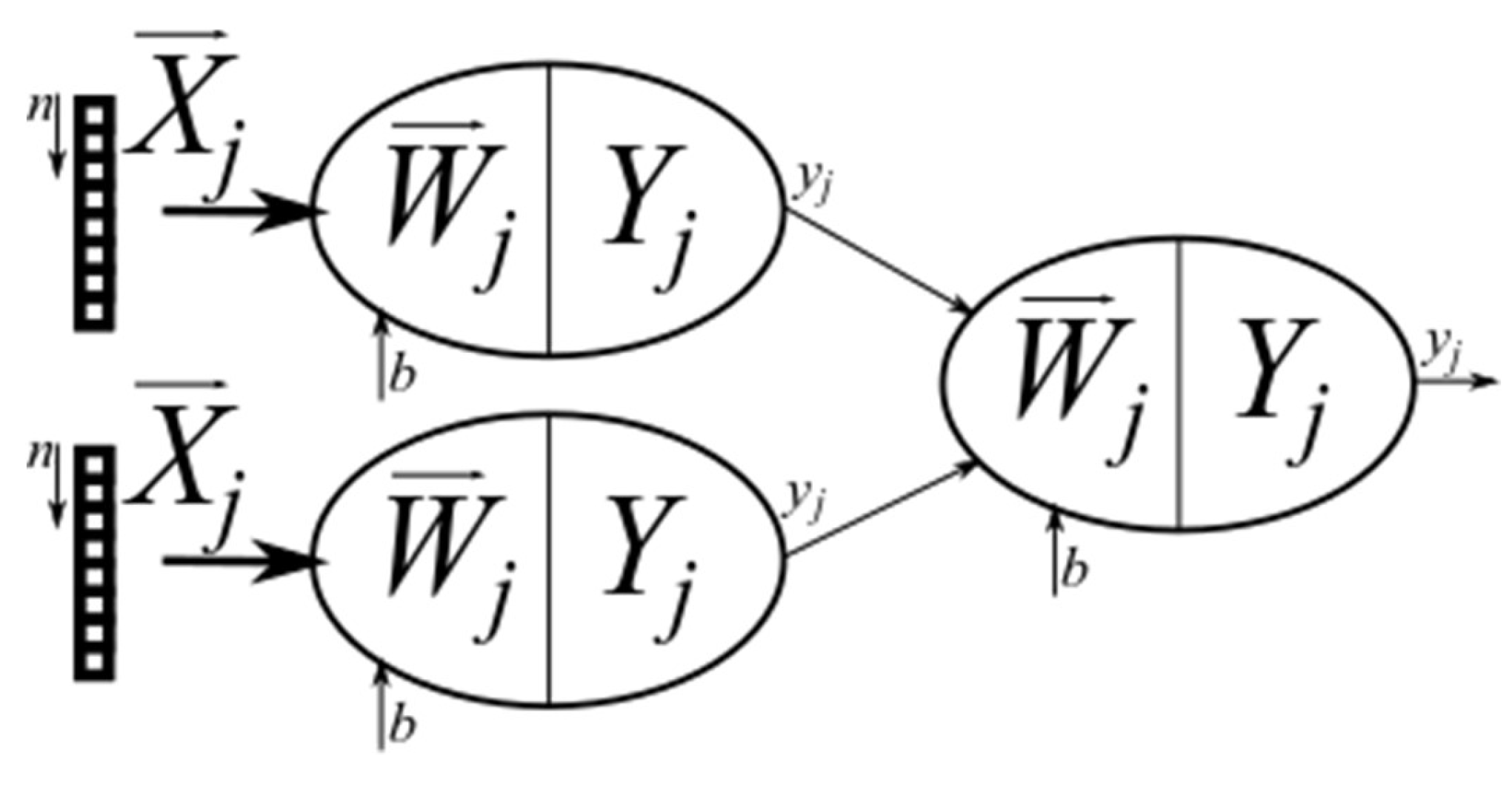
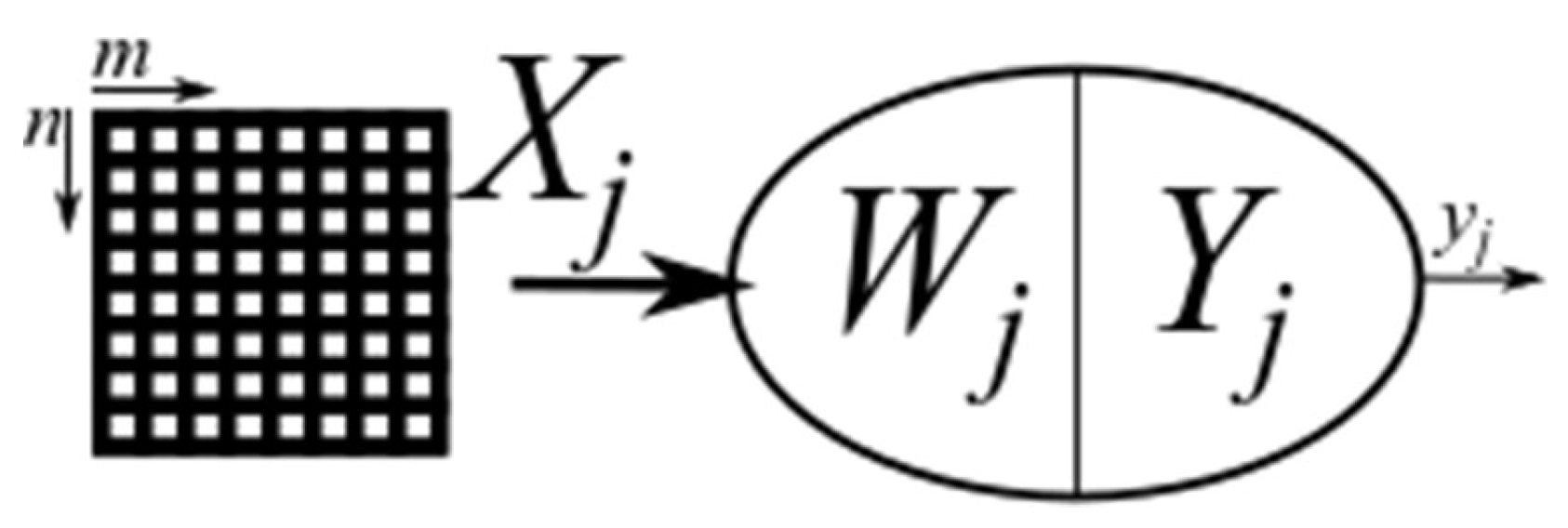
3. Neural Networks
4. Application of the Neural Networks for the Radar Signal Processing
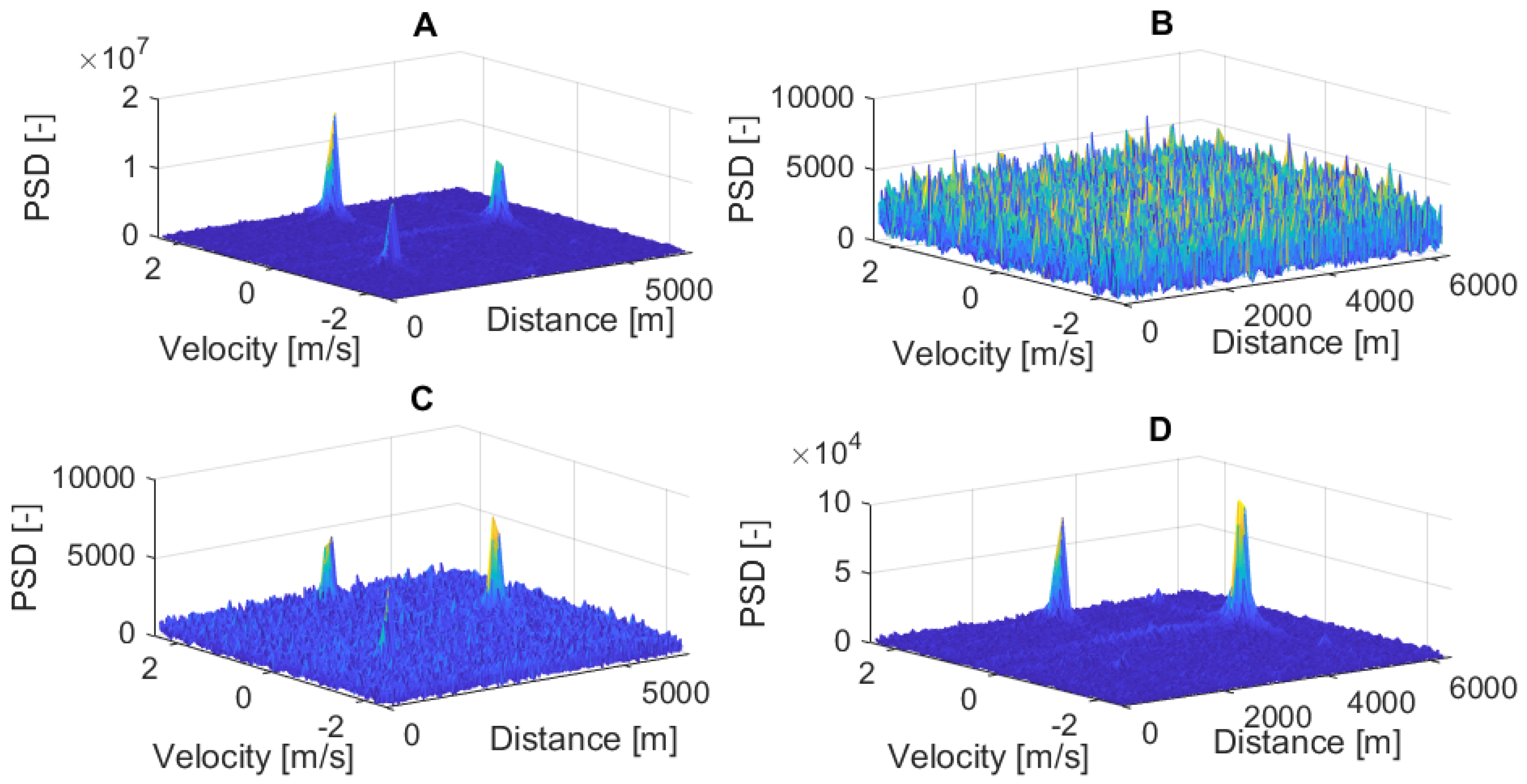
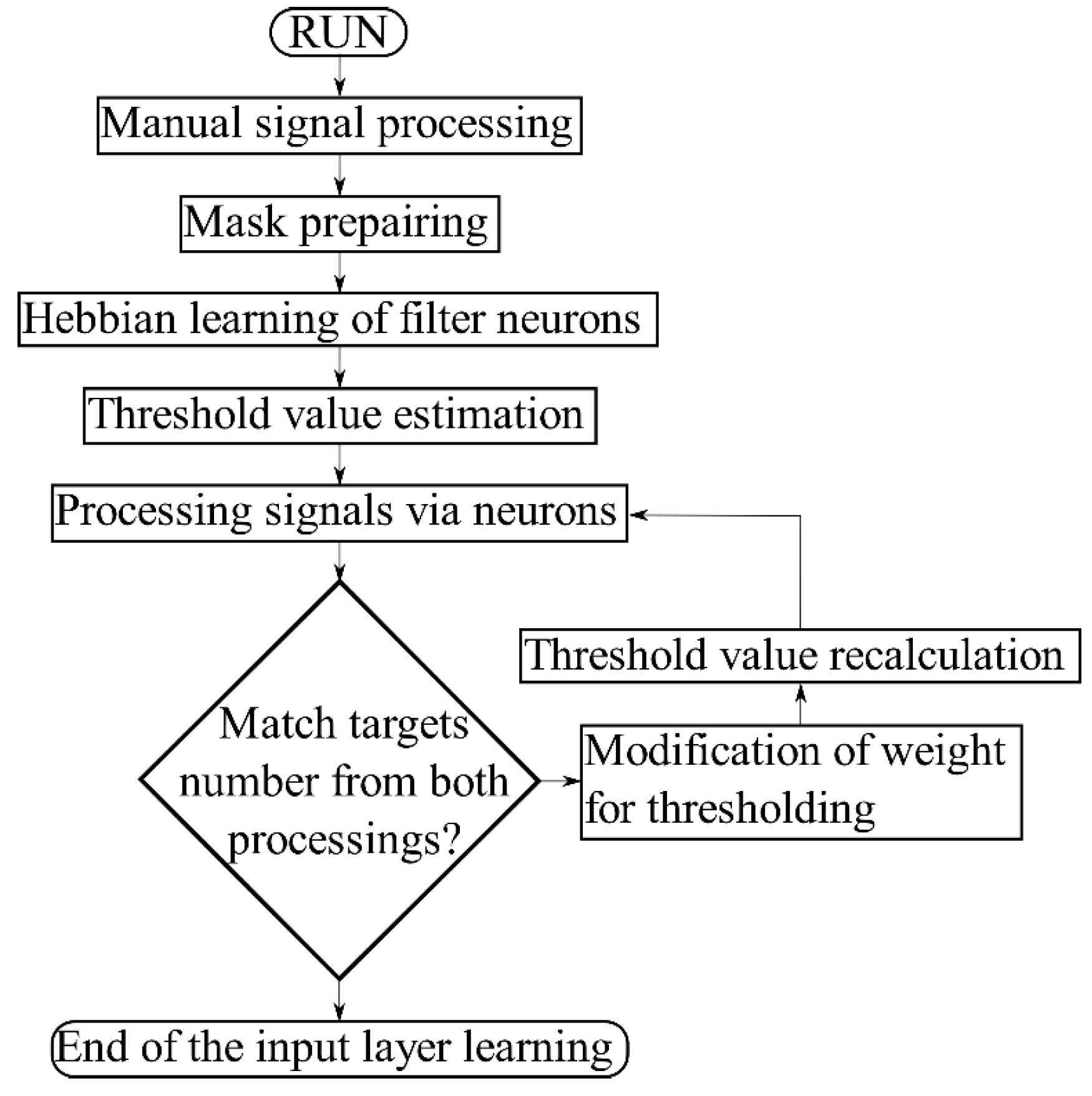
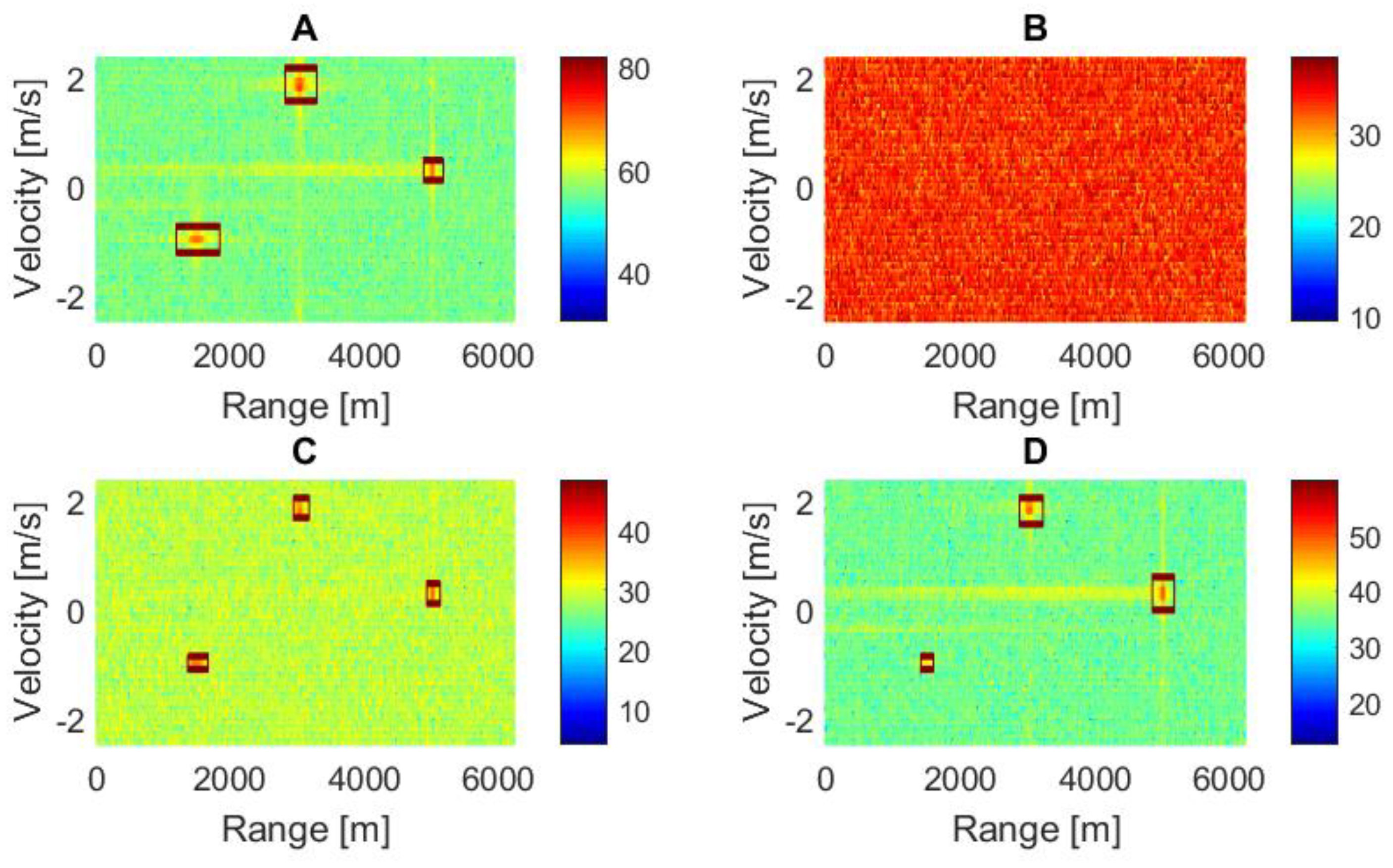
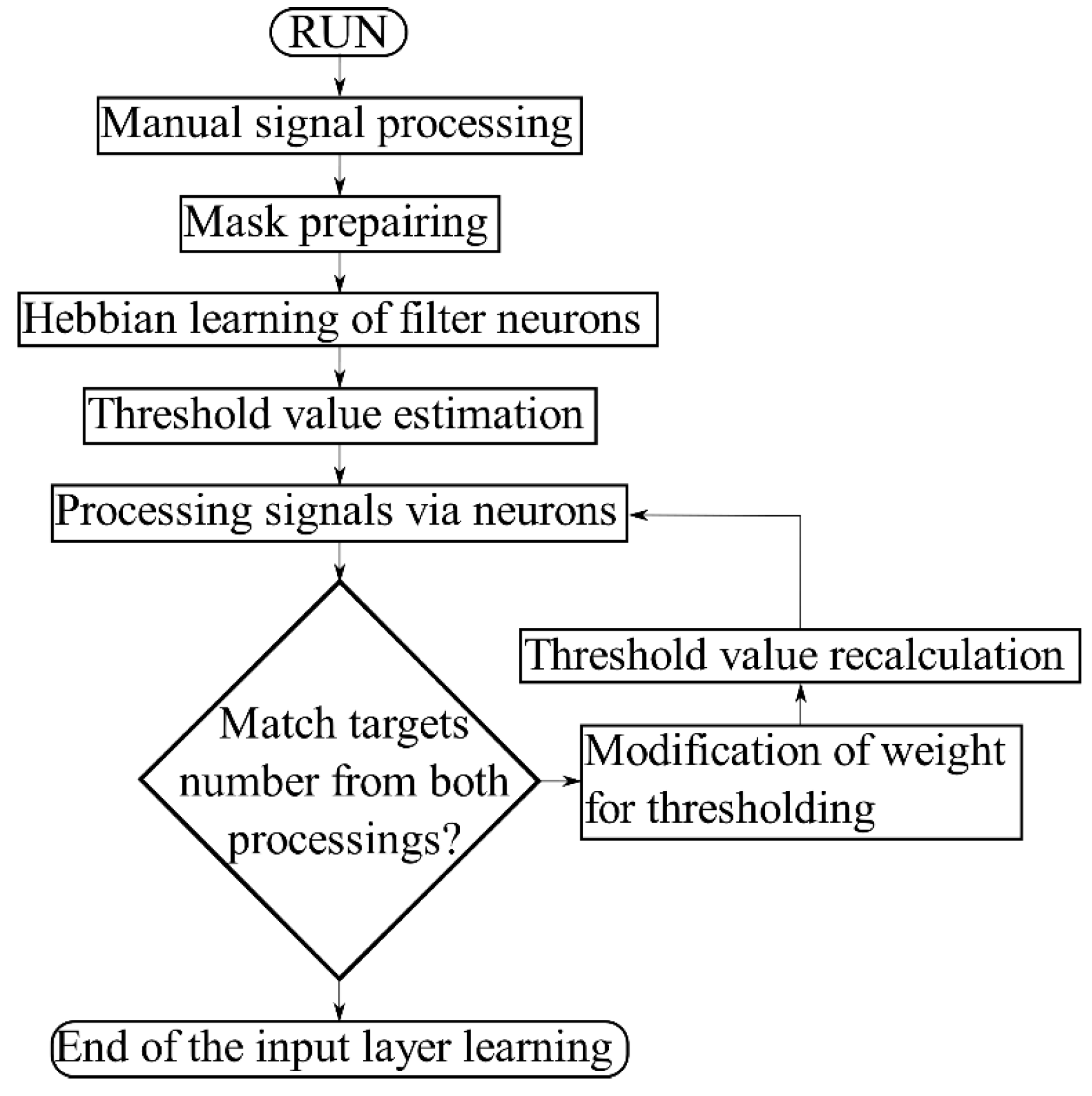
4.1. Filtration and Thresholding
4.2. Unification of the Targets
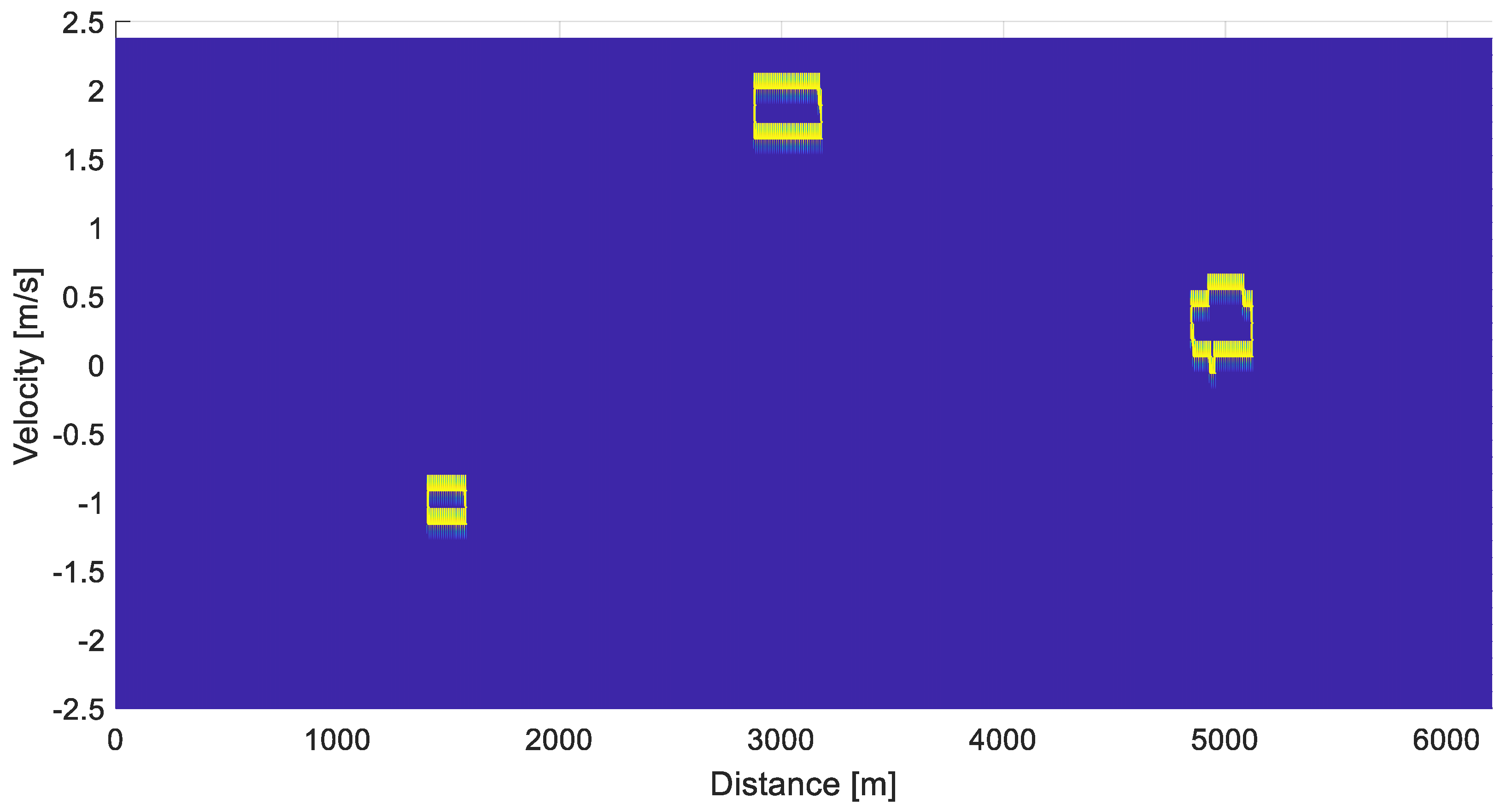
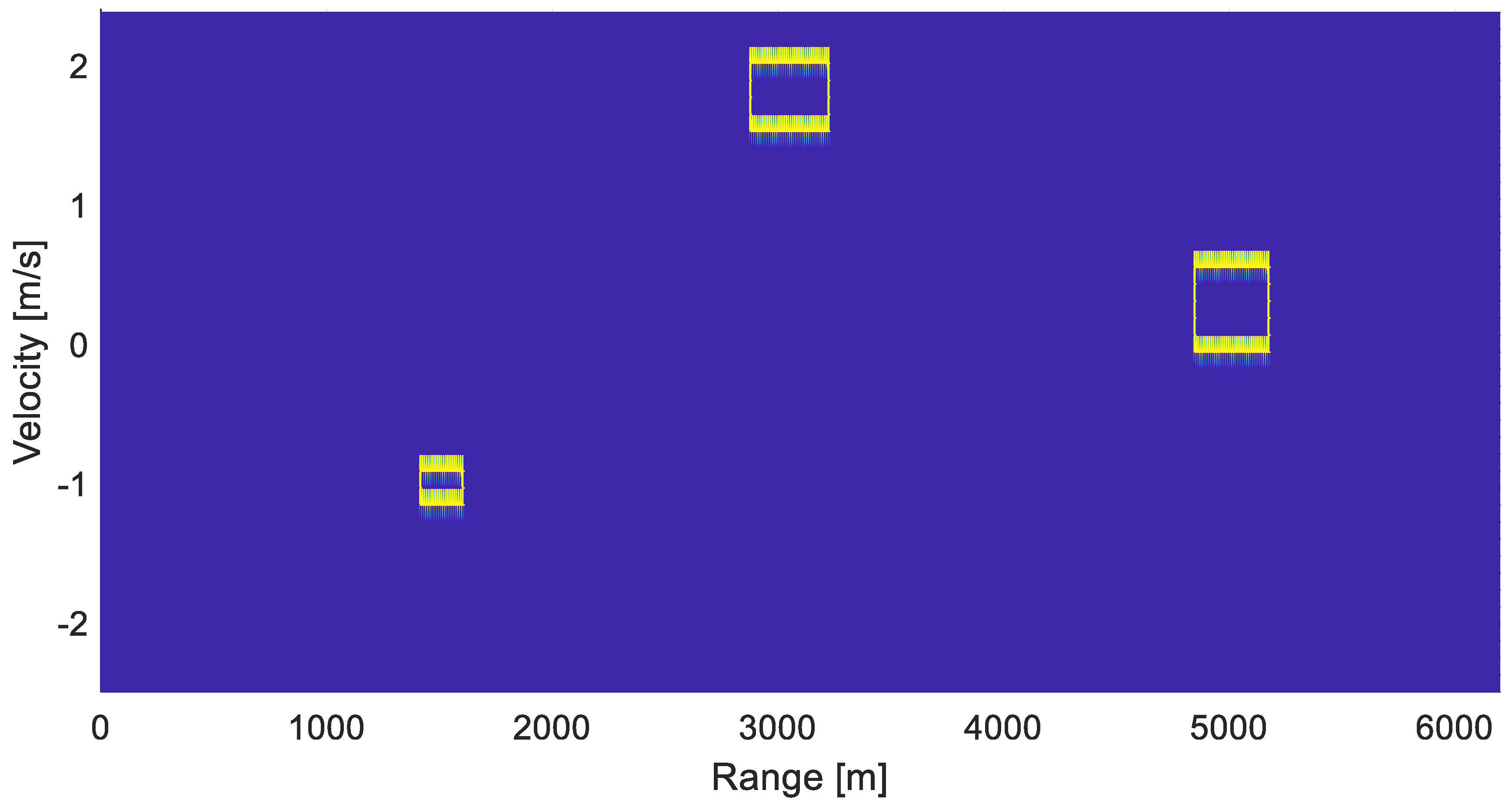
4.3. Detection of the Target Board Lines
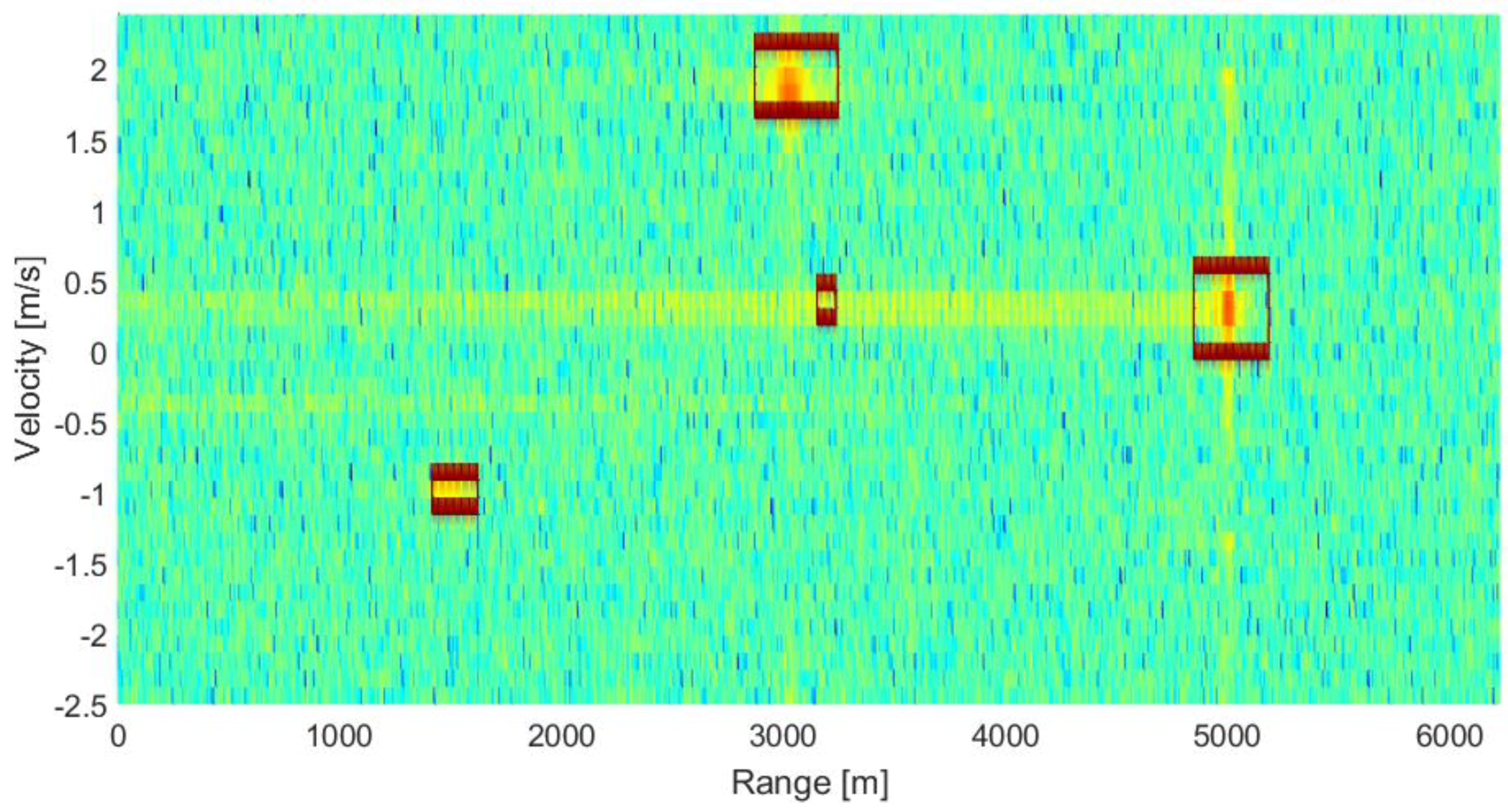
4.4. Marking of the Targets Position
5. Description of the Proposed Neural Network
6. The Algorithm Test on the Training Sequence Data and Discussion
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rejfek, L.; Fiser, O.; Chmelar, P.; Pitas, K.; Bezousek, P.; Phuong, T.T.; Dong, S.T.C.H. Automatic Analysis of the Signals from the FMICW Radars. In Proceedings of the 2019 29th International Conference Radioelektronika (RADIOELEKTRONIKA), Pardubice, Czech Republic, 16–18 April 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Neemat, S.; Krasnov, O.; Yarovoy, A. An interference mitigation technique for FMCW radar using beat-frequencies interpolation in the STFT domain. IEEE Trans. Microw. Theory Tech. 2019, 67, 1207–1220. [Google Scholar] [CrossRef]
- Bezousek, P.; Hajek, M.; Pola, M. Effects of signal distortion in a FMCW radar on range resolution. In Proceedings of the 15th Conference on Microwave Techniques (COMITE 2010), Brno, Czech Republic, 19–21 April 2010; pp. 113–116. [Google Scholar]
- Nozaki, K. FMCW Ionosonde for the SEALION project. J. Natl. Inst. Inf. Commun. Technol. 2009, 56, 287–298. [Google Scholar]
- Rejfek, L.; Fiser, O.; Matousek, D.; Beran, L.; Chmelar, P. Correction of received power for Doppler measurements by FMICW radars. In Proceedings of the Elmar—International Symposium Electronics in Marine 2017, Zadar, Croatia, 18–20 September 2017; pp. 107–110. [Google Scholar]
- Rejfek, L.; Bezousek, P.; Fiser, O.; Brazda, V. FMICW radar simulator at the frequency 35.4 GHz. In Proceedings of the 2014 24th International Conference Radioelektronika, RADIOELEKTRONIKA, Bratislava, Slovakia, 15–16 April 2014. [Google Scholar]
- Smekal, Z. Číslicové Zpracování Signálů; Skriptum; Vysoké Učení Technické v Brně, Fakulta Elektrotechniky a Komunikačních Technologií: Brno, Czech Republic, 2009; p. 208. [Google Scholar]
- Chmelarova, N.; Tykhonov, V.A. Composite vector stochastic processes model in the task of signals’ recognition. In Proceedings of the 2016 26th International Conference Radioelektronika, RADIOELEKTRONIKA, Kosice, Slovakia, 19–20 April 2016; pp. 203–206. [Google Scholar]
- Stoica, P.; Mosses, R. Introduction to Spectral Analysis; Prentice Hall: Upper Saddle River, NJ, USA, 1997. [Google Scholar]
- Otto, T. Presentation “Principle of FMCW Radars”. Available online: https://www.slideshare.net/tobiasotto/principle-of-fmcw-radars (accessed on 26 July 2012).
- Sediono, W. Method of measuring Doppler shift of moving targets using FMCW maritime radar. In Proceedings of the 2013 IEEE International Conference on Teaching, Assessment and Learning for Engineering (TALE), Bali, Indonesia, 26–29 August 2013; pp. 378–381. [Google Scholar]
- Rejfek, L.; Fiser, O.; Matousek, D.; Beran, L.; Chmelar, P. Sensitivity analysis of PCDR35 radar. In Proceedings of the Elmar—International Symposium Electronics in Marine, Zadar, Croatia, 18–20 September 2017; pp. 111–114. [Google Scholar]
- Reznicek, M.; Bezousek, P.; Zalabsky, T. AMTI filter design for radar with variable pulse repetition period. J. Electr. Eng. 2016, 67, 131–136. [Google Scholar]
- Hikawa, H. A Digital Hardware Pulse-Mode Neuron With Piecewise Linear activation Function. IEEE Trans. Neural Netw. 2003, 14, 1028–1037. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Liu, S.; Wang, Y.; Lombardi, F.; Han, J. A Stochastic Computational Multi-Layer Perceptron with Backward Propagation. IEEE Trans. Comput. 2018, 67, 1273–1286. [Google Scholar] [CrossRef]
- Volna, E. Scriptum “Neuronové sítě 1”; Ostravská Univerzita: Ostrava, Czech Republic, 2002. [Google Scholar]
- Mandlik, M.; Brazda, V. FMICW radar simulator. In Proceedings of the 25th International Conference Radioelektronika (RADIOELEKTRONIKA), Pardubice, Czech Republic, 21–22 April 2015; pp. 317–320. [Google Scholar]
- Krejci, T.; Mandlik, M. Close vehicle warning for bicyclists based on FMCW radar. In Proceedings of the 2017 27th International Conference Radioelektronika (RADIOELEKTRONIKA), Brno, Czech Republic, 19–20 April 2017; pp. 1–5. [Google Scholar]
- Hong, D.; Yang, C. Algorithm design for detection and tracking of multiple targets using FMCW radar. In Proceedings of the Program Book—OCEANS 2012 MTS/IEEE Yeosu: The Living Ocean and Coast—Diversity of Resources and Sustainable Activities, Yeosu, Korea, 21–24 May 2012. [Google Scholar]
- Yulian, D.; Hidayat, R.; Nugroho, H.A.; Lestari, A.A.; Prasaja, F. Automated ship detection with image enhancement and feature extraction in FMCW marine radars. In Proceedings of the 2017 International Conference on Radar, Antenna, Microwave, Electronics, and Telecommunications (ICRAMET), Jakarta, Indonesia, 23–24 October 2017; pp. 58–63. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | Totally Right | Lost Targets | False Alerts |
|---|---|---|---|
| 3 strong targets | 97 | 0 | 3 |
| Noise | 100 | - | 0 |
| 3 weak targets | 96 | 4 | 4 |
| 1 weak and 2 strong targets | 94 | 0 | 6 |
| Cases | Totally Right | Lost Targets | False Alerts |
|---|---|---|---|
| 3 strong targets | 33 | 0 | 77 |
| Noise | 100 | - | 0 |
| 3 weak targets | 95 | 4 | 5 |
| 1 weak and 2 strong targets | 94 | 0 | 6 |
| Cases | Number of Targets | Distances | Doppler Shifts |
|---|---|---|---|
| 3 strong targets | 94 | 94 | 94 |
| Noise | 100 | - | - |
| 3 weak targets | 96 | 96 | 96 |
| 1 weak and 2 strong targets | 84 | 84 | 84 |
| Cases | Totally Right | Lost Targets | False Alerts |
|---|---|---|---|
| 3 strong targets | 100 | 0 | 0 |
| Noise | 100 | - | 0 |
| 3 weak targets | 96 | 4 | 4 |
| 1 weak and 2 strong targets | 94 | 0 | 6 |
| Cases | Totally Right | Lost Targets | False Alerts |
|---|---|---|---|
| 3 strong targets | 100 | 0 | 0 |
| Noise | 100 | - | 0 |
| 3 weak targets | 100 | 0 | 0 |
| 1 weak and 2 strong targets | 94 | 0 | 6 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rejfek, L.; N. Nguyen, T.; Chmelar, P.; Beran, L.; T. Tran, P. Neural Networks Application for Processing of the Data from the FMICW Radars. Symmetry 2019, 11, 1308. https://doi.org/10.3390/sym11101308
Rejfek L, N. Nguyen T, Chmelar P, Beran L, T. Tran P. Neural Networks Application for Processing of the Data from the FMICW Radars. Symmetry. 2019; 11(10):1308. https://doi.org/10.3390/sym11101308
Chicago/Turabian StyleRejfek, Lubos, Tan N. Nguyen, Pavel Chmelar, Ladislav Beran, and Phuong T. Tran. 2019. "Neural Networks Application for Processing of the Data from the FMICW Radars" Symmetry 11, no. 10: 1308. https://doi.org/10.3390/sym11101308
APA StyleRejfek, L., N. Nguyen, T., Chmelar, P., Beran, L., & T. Tran, P. (2019). Neural Networks Application for Processing of the Data from the FMICW Radars. Symmetry, 11(10), 1308. https://doi.org/10.3390/sym11101308