Comparative Evaluation of Algorithms for Spatial Interpolation of Atmospheric State Parameters Based on a Dynamic Stochastic Model Taking into Account the Vertical Variation of a Meteorological Field


{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Statement and Features of the Proposed Approach
2.1. General Problem Statement and Description of the Model
2.2. Kalman Filter Structure for the First Variant of the Interpolation Algorithm
2.3. Kalman Filter Structure for the Second Variant of the Interpolation Algorithm
2.4. General Matrix Expressions for the Synthesized Algorithms
3. Results of the Experiment and Statistical Evaluation
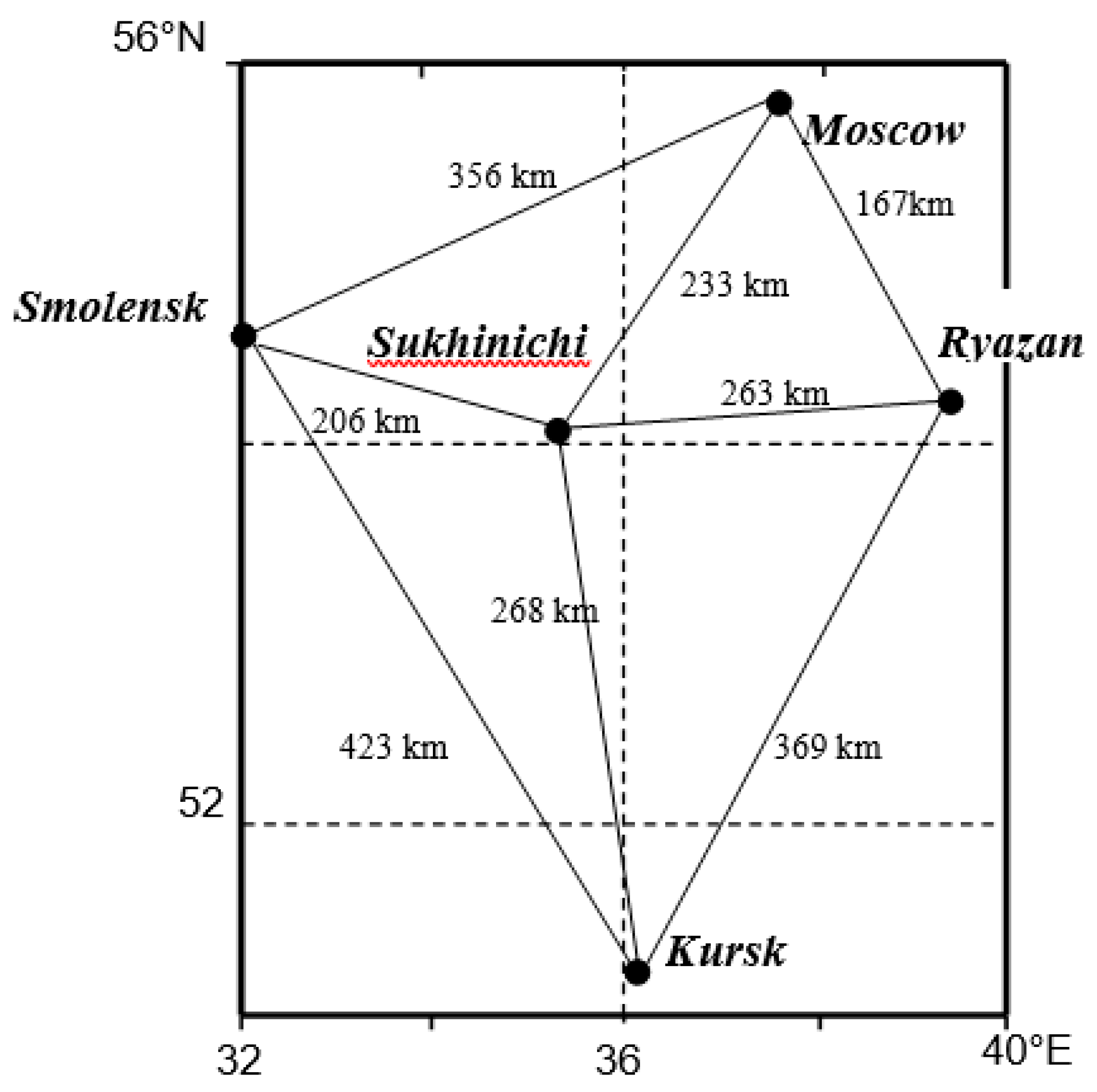
3.1. Description of the Experimental Data
3.2. Initial Conditions for LKF Initiation
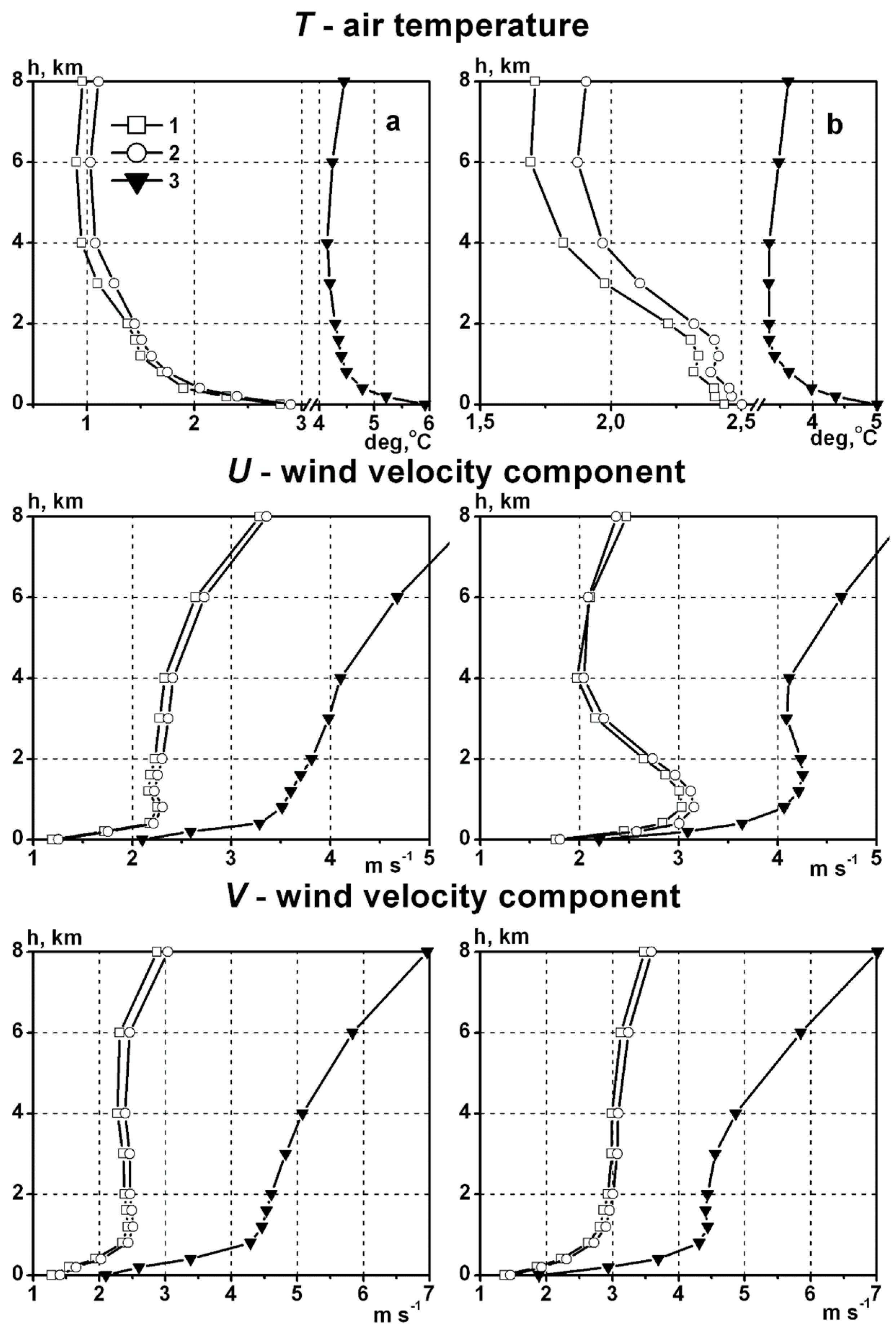
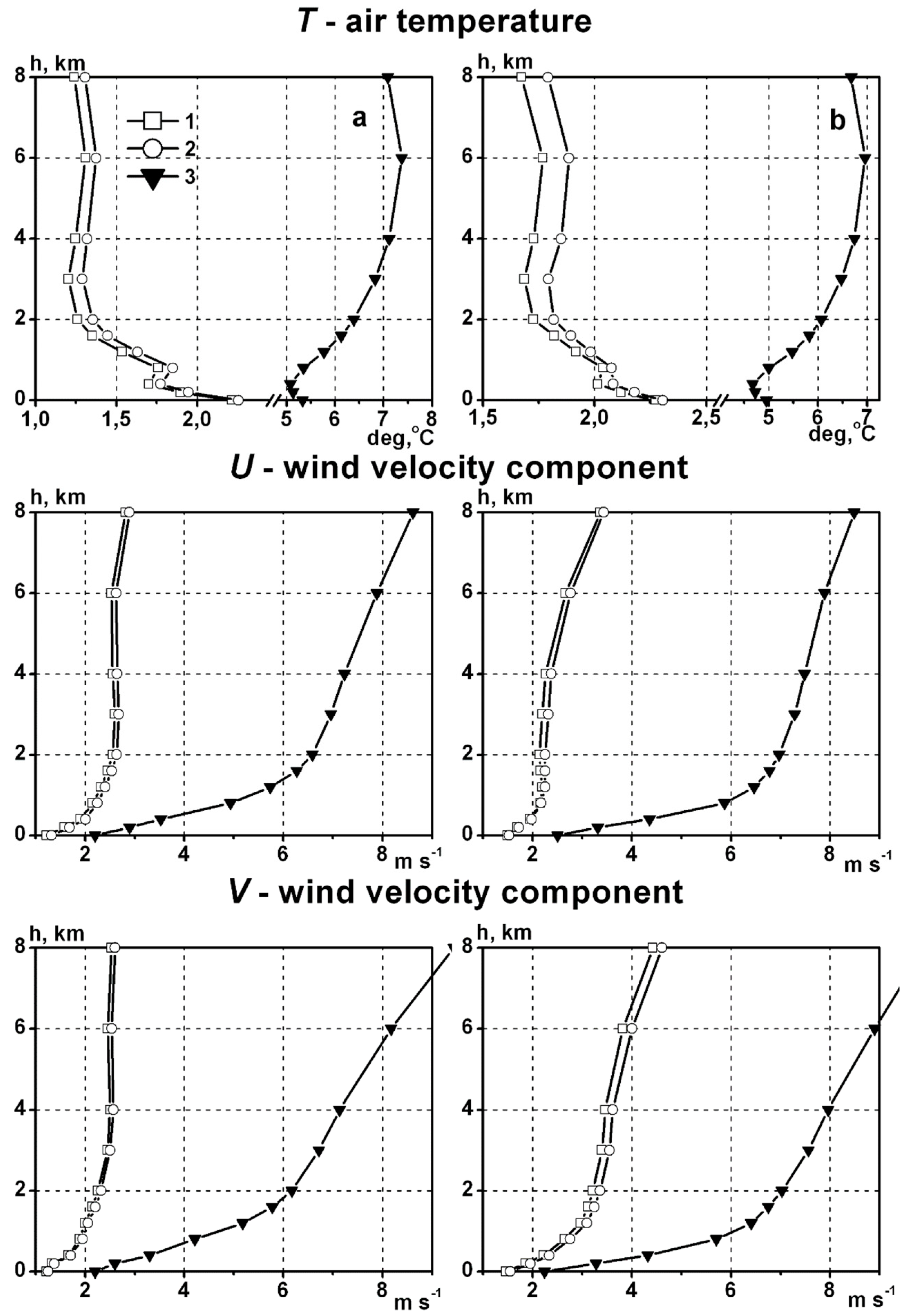
3.3. Comparative Analysis of the Simulation Results
3.4. Additional Notes
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bushby, F.H.; Huckle, V.M. Objective analysis in numerical forecasting. Q. J. R. Meteorol. Soc. 1957, 83, 232–247. [Google Scholar] [CrossRef]
- Belov, P.N. Numerical Methods of Weather Forecasting; Gidrometeoizdat: Leningrad, Russia, 1967; p. 335. [Google Scholar]
- Gordin, V.A.; Loktionova, E.A. On the application of the spline-approximation of the hydrostatic equation to the checking and adjustment of temperature and height data samples. Res. Act. Atmos. Ocean. Model. 1981, 2, 12–17. [Google Scholar]
- Gandin, L.S.; Kagan, R.L. Statistical Methods of Meteorological Data Interpretation; Gidrometeoizdat: Leningrad, Russia, 1976; p. 359. [Google Scholar]
- Gandin, L.S. Objective Analysis of Meteorological Fields; Gidrometeoizdat: Leningrad, Russia, 1963; p. 287. [Google Scholar]
- Komarov, V.S. Statistics in Application to Solve Applied Meteorological Problems; Publishing House “Spektr” of IAO SB RAS: Tomsk, Russia, 1997; p. 256. [Google Scholar]
- Komarov, V.S.; Popov, Y.B.; Suvorov, S.S.; Kurakov, V.A. Dynamic-Stochastic Methods with Their Application to Meteorology; Publishing House of IAO SB RAS: Tomsk, Russia, 2004; p. 236. [Google Scholar]
- Popov, Y.B.; Popova, A.I. Optimum Filtering and Its Application in Tasks of Monitoring of State Parameters of Atmosphere within the Bounds of Local Areas; Polygraphist: Khanty-Mansiysk, Russia, 2008; p. 188. [Google Scholar]
- Klimova, E.G. Recovering Meteorological Fields from Observational Data. Doctor Thesis, Institute of Computational Technologies of SB RAS, Novosibirsk, Russia, 2005. [Google Scholar]
- Klimova, E.G. A suboptimal data assimilation algorithm based on the ensemble Kalman filter. Q. J. R. Meteorol. Soc. 2012, 138, 2079–2085. [Google Scholar] [CrossRef]
- Houtekamer, P.L.; Mitchell, H.L. Data assimilation using an ensemble Kalman filtering technique. Mon. Weather Rev. 1998, 126, 796–811. [Google Scholar] [CrossRef]
- Schlatter, T.W. Variational assimilation of meteorological observations in the lower atmosphere: A tutorial on how it works. J. Atmos. Sol. Terr. Phys. 2000, 62, 1057–1070. [Google Scholar] [CrossRef]
- Wilks, D.S. Statistical Methods in the Atmospheric Sciences, 2nd ed.; Academic Press: Cambridge, MA, USA, 2006; p. 611. [Google Scholar]
- Lavrinenko, A.V.; Moldovanova, E.A.; Mymrina, D.F.; Popova, A.I.; Popova, K.Y.; Popov, Y.B. Spatial interpolation of meteorological fields using a multilevel parametric dynamic stochastic low-order model. J. Atmos. Sol. Terr. Phys. 2018, 181 Pt A, 38–43. [Google Scholar] [CrossRef]
- Popov, Y.B. Estimation of atmospheric state parameters using the four-dimensional dynamic-stochastic model and Kalman linear filter. Part 1. Methodical foundations. J. Proc. TUSUR 2010, 21 Pt 2, 5–11. [Google Scholar]
- Klimova, E.G. A primitive-equation model for calculation of forecast error covariances in the Kalman filter algorithm. Russ. Meteorol. Hydrol. 2001, 11, 5–12. [Google Scholar]
- Marchuk, G.I. Numerical Methods in Weather Prediction; Academic Press: Cambridge, MA, USA, 1974; p. 288. [Google Scholar]
- Zverev, A.S. Synoptic Meteorology; Gidrometeoizdat: Leningrad, Russia, 1977; p. 711. [Google Scholar]
- Komarov, V.S.; Popov, Y.B. Estimation and prediction of atmospheric state parameters using the Kalman filtering algorithm. Part 1. Methodic foundation. J. Atmos. Ocean. Opt. 2001, 14, 230–234. [Google Scholar]
- Komarov, V.S.; Il’in, S.N.; Kreminskii, A.V.; Lomakina, N.Y.; Popov, Y.B.; Popova, A.I.; Suvorov, S.S. Estimation and extrapolation of the atmospheric state parameters on the mesoscale level using a Kalman filter algorithm. J. Atmos. Ocean. Technol. 2004, 21, 488–494. [Google Scholar] [CrossRef]
- Komarov, V.S.; Lavrinenko, A.V.; Lomakina, N.Y.; Popov, Y.B.; Popova, A.I.; Il’in, S.N. Spatial extrapolation of mesoscale meteorological fields using a 4D-dynamic-stochastic model and the Kalman filter algorithm. J. Atmos. Ocean. Opt. 2004, 17, 651–656. [Google Scholar]
- Komarov, V.S.; Lavrinenko, A.V.; Kreminskii, A.V.; Lomakina, N.Y.; Popov, Y.B.; Popova, A.I. New method of spatial extrapolation of meteorological fields on the mesoscale level using a Kalman filter algorithm for a four-dimensional dynamic-stochastic model. J. Atmos. Ocean. Technol. 2007, 24, 182–193. [Google Scholar] [CrossRef]
- Evensen, G. The Ensemble Kalman Filter: Theoretical formulation and practical implementation. Ocean Dyn. 2003, 53, 343–365. [Google Scholar] [CrossRef]
- Wang, S.; Ancell, B.C.; Huang, G.H.; Baetz, B.W. Improving Robustness of Hydrologic Ensemble Predictions Through Probabilistic Pre- and Post-Processing in Sequential Data Assimilation. Water Resour. Res. 2018, 54, 2129–2151. [Google Scholar] [CrossRef]
- Bishop, C.H.; Etherton, B.J.; Majumdar, S.J. Adaptive Sampling with the Ensemble Transform Kalman Filter. Part I: Theoretical Aspects. Mon. Weather Rev. 2001, 129, 420–436. [Google Scholar] [CrossRef]
- Whitaker, J.S.; Hamill, T.M. Ensemble data assimilation without perturbed observations. Mon. Weather Rev. 2002, 130, 1913–1924. [Google Scholar] [CrossRef]
- Ott, E.; Hunt, B.R.; Szunyogh, I.; Zimin, A.V.; Kostelich, E.J.; Corazza, M.; Kalnay, E.; Patil, D.J.; Yorke, J.A. A local ensemble Kalman Filter for atmospheric data assimilation. Tellus 2004, 56A, 415–428. [Google Scholar] [CrossRef]
- Szunyogh, I.; Kostelich, E.; Gyarmati, G.; Kalnay, E.; Hunt, B.R.; Ott, E.; Satterfield, E.; Szunyogh, I.; Yorke, J.A. A local ensemble transform Kalman Filter data assimilation system for the NCEP global model. Tellus 2007, 59A, 1–18. [Google Scholar]
- Zupanski, M. Maximum Likelihood Ensemble Filter: Theoretical Aspects. Mon. Weather Rev. 2005, 133, 1710–1726. [Google Scholar] [CrossRef]
- Sage, A.P.; Melsa, J.L. Estimation Theory with Application to Communication and Control, 1st ed.; McGraw-Hill: New York, NY, USA, 1971; p. 752. [Google Scholar]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Popov, Y.; Lavrinenko, A.; Krasnenko, N.; Popova, A.; Popova, K.; Shelupanov, A. Comparative Evaluation of Algorithms for Spatial Interpolation of Atmospheric State Parameters Based on a Dynamic Stochastic Model Taking into Account the Vertical Variation of a Meteorological Field. Symmetry 2019, 11, 1207. https://doi.org/10.3390/sym11101207
Popov Y, Lavrinenko A, Krasnenko N, Popova A, Popova K, Shelupanov A. Comparative Evaluation of Algorithms for Spatial Interpolation of Atmospheric State Parameters Based on a Dynamic Stochastic Model Taking into Account the Vertical Variation of a Meteorological Field. Symmetry. 2019; 11(10):1207. https://doi.org/10.3390/sym11101207
Chicago/Turabian StylePopov, Yuriy, Andrey Lavrinenko, Nikolay Krasnenko, Avgustina Popova, Kseniya Popova, and Alexander Shelupanov. 2019. "Comparative Evaluation of Algorithms for Spatial Interpolation of Atmospheric State Parameters Based on a Dynamic Stochastic Model Taking into Account the Vertical Variation of a Meteorological Field" Symmetry 11, no. 10: 1207. https://doi.org/10.3390/sym11101207
APA StylePopov, Y., Lavrinenko, A., Krasnenko, N., Popova, A., Popova, K., & Shelupanov, A. (2019). Comparative Evaluation of Algorithms for Spatial Interpolation of Atmospheric State Parameters Based on a Dynamic Stochastic Model Taking into Account the Vertical Variation of a Meteorological Field. Symmetry, 11(10), 1207. https://doi.org/10.3390/sym11101207