Abstract
We study and examine the rotational hypersurface and its Gauss map in Euclidean four-space . We calculate the Gauss map, the mean curvature and the Gaussian curvature of the rotational hypersurface and obtain some results. Then, we introduce the third Laplace–Beltrami operator. Moreover, we calculate the third Laplace–Beltrami operator of the rotational hypersurface in We also draw some figures of the rotational hypersurface.
1. Introduction
When we focus on the rotational characters in the literature, we meet Arslan et al. [1,2], Arvanitoyeorgos et al. [3], Chen [4,5], Dursun and Turgay [6], Kim and Turgay [7], Takahashi [8], and many others.
Magid, Scharlach and Vrancken [9] introduced the affine umbilical surfaces in four-space. Vlachos [10] considered hypersurfaces in with the harmonic mean curvature vector field. Scharlach [11] studied the affine geometry of surfaces and hypersurfaces in four-space. Cheng and Wan [12] considered complete hypersurfaces of four-space with constant mean curvature.
General rotational surfaces in were introduced by Moore [13,14]. Ganchev and Milousheva [15] considered these kinds of surfaces in the Minkowski four-space. They classified completely the minimal rotational surfaces and those consisting of parabolic points. Arslan et al. [2] studied generalized rotation surfaces in Moreover, Dursun and Turgay [6] studied minimal and pseudo-umbilical rotational surfaces in .
In [16], Dillen, Fastenakels and Van der Veken studied the rotation hypersurfaces of and and proved a criterion for a hypersurface of one of these spaces to be a rotation hypersurface. They classified minimal, flat rotation hypersurfaces and normally flat rotation hypersurfaces in the Euclidean and Lorentzian space containing and , respectively. Senoussi and Bekkar [17] studied the Laplace operator using the fundamental forms and of the helicoidal surfaces in .
For the characters of ruled (helicoid) and rotational surfaces, please see Bour’s theorem in [18]. Do Carmo and Dajczer [19] showed the existence of surfaces isometric to helicoidal ones by using Bour’s theorem [18]. Güler [20] studied a helicoidal surface with a light-like profile curve using Bour’s theorem in Minkowski geometry. Furthermore, Hieu and Thang [21] studied helicoidal surfaces by Bour’s theorem in four-space. Choi et al. [22] studied helicoidal surfaces and their Gauss map in Minkowski three-space. See also [23,24,25,26]. Güler, Magid and Yaylı [27] studied the Laplace–Beltrami operator of a helicoidal hypersurface in .
In the present paper, we consider the rotational hypersurface with three-parameters and its Gauss map in Euclidean four-space . We give some basic notions of the four-dimensional Euclidean geometry in Section 2. We give the definition of a rotational hypersurface, and then, we calculate the mean and the Gaussian curvatures of such a hypersurface in Section 3. In Section 4, we obtain the mean and the Gaussian curvatures of the Gauss map of the hypersurface. Moreover, we introduce the third Laplace–Beltrami operator and calculate it in in Section 5. Finally, we give a conclusion in the last section.
2. Curvatures in
We identify a vector with its transpose. Let be an isometric immersion of a hypersurface in . The triple vector product of and is defined by
For a hypersurface in four-space, the first and the second fundamental form matrices are as follows: where means the Euclidean dot product; some partial differentials that we represent are ; and
is the Gauss map (i.e., the unit normal vector). The product of the matrices and gives the matrix of the shape operator Here, are the elements of . Therefore, the formulas of the Gaussian curvature and the mean curvature are given by
and
respectively.
3. Rotational Hypersurface in
We define the rotational hypersurface in . Let be a curve in a plane in and ℓ be a line in .
Definition 1.
A rotational hypersurface in is defined by rotating a curve γ around a line ℓ. In this case, γ and ℓ are called the profile curve and the axis of , resp.
We now describe a rotational hypersurface of more precisely. Without loss of generality, we may assume that the straight line ℓ is the line spanned by the vector . The orthogonal matrix that fixes the above vector is
The matrix can be found by solving the equations
simultaneously. Since the axis of rotation ℓ is the -axis of the profile curve can be put as follows
where is a differentiable function, . Therefore, the rotational hypersurface, which is spanned by the vector in , is given by
where Therefore, we obtain the parametrization of
Theorem 1.
The Gaussian curvature K and the mean curvature H of the rotational hypersurface (4) are given as follows, respectively,
where , ,
Proof.
Using the first partial differentials of (4) with respect to we get the first quantities as follows
We have
Using the second partial differentials of (4) with respect to the second quantities are given as follows
where
and □
The Gauss map of the rotational hypersurface is given by
See Figure 1 and Figure 2 for some different projections and symmetries, from four-space to three-spaces of the Gauss map of the rotational hypersurface.
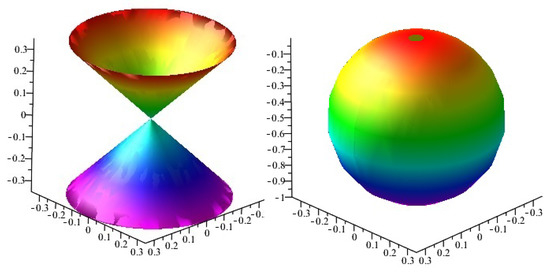
Figure 1.
Projections of : (left) into -space; (right) into -space;
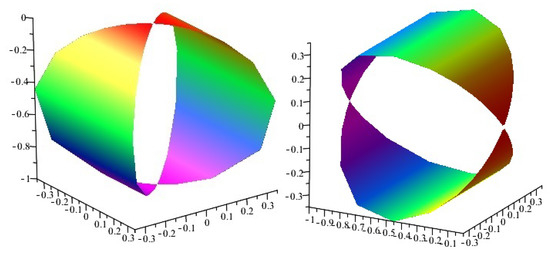
Figure 2.
Projections of : (left) into -space; (right) into -space;
Thus, the shape operator of the rotational hypersurface is obtained as
From these, we obtain the Gaussian curvature K and the mean curvature H of the rotational hypersurface as follows
Therefore, we have the following corollaries:
Corollary 1.
Let : ⟶ be an isometric immersion given by (4). Then, has constant Gaussian curvature iff
Corollary 2.
Let : ⟶ be an isometric immersion given by (4). Then, has constant mean curvature (CMC) iff
Corollary 3.
Let : ⟶ be an isometric immersion given by (4). Then, has zero Gaussian curvature iff
Proof.
Solving the second order differential equation i.e.,
we get the solution.
Corollary 4.
Let : ⟶ be an isometric immersion given by (4). Then, has zero mean curvature iff
Proof.
When we solve the second order differential equation i.e.,
we get the solution. Taking , we have
Therefore, the solutions of are given, by using Mathematica, as follows
and, by using Maple, we get for the solutions :
where EllipticF[,m] gives the elliptic integral of the first kind F(). □
Corollary 5.
Proof.
For the third kind improper integral we get
Taking we have
□
4. Gauss Map
Theorem 2.
Proof.
Using the first partial differentials of (5), we get the first quantities as follows
We have
where Using the second partial differentials of (5), we have the second quantities as follows
where
The shape operator of (6) is
Finally, we obtain the Gaussian curvature and the mean curvature of (5) as and □
5. The Third Laplace–Beltrami Operator
Next, we introduce the third Laplace–Beltrami operator to the four-space. Then, we apply it for the hypersurface (4). See [28] for the Laplace–Beltrami operator in three-space.
The inverse of the matrix
is as follows
where
Definition 2.
The third Laplace–Beltrami operator of hypersurface is as follows
where and and is a smooth function of class . We can write as follows
Clearly, we can write the matrix of the third fundamental form
where
Here, is the Gauss map (i.e., the unit normal vector). More precisely, we get
where
Hence, using a function , we specifically obtain
We continue our calculations to find the third Laplace–Beltrami operator of the rotational hypersurface using (9) in (4).
Here, using the parametrization we get Therefore, we have the following
where
We obtain the vectors
and
Taking differentials with respect to and w on respectively, we get
Therefore, we obtain the following theorem:
Theorem 3.
6. Conclusions
When the rotational hypersurface has the equation i.e., the rotational hypersurface (4) is -minimal, then we have to solve the system of equation
where . In fact, the -minimal hypersurface of the four-space is a very interesting problem. It is challenging to solve the above equations.
When or and we get Hence, the rotational hypersurface (4) is not -minimal.
Author Contributions
E.G. gave the idea for the third Laplace–Beltrami operator problem in a rotational hypersurface in four-space. H.H.H. and Y.H.K. checked and polished the draft.
Funding
This research received no external funding.
Conflicts of Interest
The authors declares that there is no conflict of interest regarding the publication of this paper.
References
- Arslan, K.; Deszcz, R.; Yaprak, Ş. On Weyl pseudosymmetric hypersurfaces. Colloq. Math. 1997, 72, 353–361. [Google Scholar] [CrossRef]
- Arslan, K.; Kılıç Bayram, B.; Bulca, B.; Öztürk, G. Generalized Rotation Surfaces in . Results Math. 2012, 61, 315–327. [Google Scholar] [CrossRef]
- Arvanitoyeorgos, A.; Kaimakamis, G.; Magid, M. Lorentz hypersurfaces in satisfying ΔH = αH. Ill. J. Math. 2009, 53, 581–590. [Google Scholar]
- Chen, B.Y. Total Mean Curvature and Submanifolds of Finite Type; World Scientific: Singapore, 1984. [Google Scholar]
- Chen, B.Y.; Choi, M.; Kim, Y.H. Surfaces of revolution with pointwise 1-type Gauss map. Korean Math. Soc. 2005, 42, 447–455. [Google Scholar] [CrossRef]
- Dursun, U.; Turgay, N.C. Minimal and pseudo-umbilical rotational surfaces in Euclidean space . Mediterr. J. Math. 2013, 10, 497–506. [Google Scholar] [CrossRef]
- Kim, Y.H.; Turgay, N.C. Surfaces in with L1-pointwise 1-type Gauss map. Bull. Korean Math. Soc. 2013, 50, 935–949. [Google Scholar] [CrossRef]
- Takahashi, T. Minimal immersions of Riemannian manifolds. J. Math. Soc. Jpn. 1966, 18, 380–385. [Google Scholar] [CrossRef]
- Magid, M.; Scharlach, C.; Vrancken, L. Affine umbilical surfaces in . Manuscr. Math. 1995, 88, 275–289. [Google Scholar] [CrossRef]
- Vlachos, T. Hypersurfaces in with harmonic mean curvature vector field. Math. Nachr. 1995, 172, 145–169. [Google Scholar]
- Scharlach, C. Affine Geometry of Surfaces and Hypersurfaces in . In Symposium on the Differential Geometry of Submanifolds; Dillen, F., Simon, U., Vrancken, L., Eds.; Un. Valenciennes: Valenciennes, France, 2007; Volume 124, pp. 251–256. [Google Scholar]
- Cheng, Q.M.; Wan, Q.R. Complete hypersurfaces of with constant mean curvature. Monatsh. Math. 1994, 118, 171–204. [Google Scholar] [CrossRef]
- Moore, C. Surfaces of rotation in a space of four dimensions. Ann. Math. 1919, 21, 81–93. [Google Scholar] [CrossRef]
- Moore, C. Rotation surfaces of constant curvature in space of four dimensions. Bull. Am. Math. Soc. 1920, 26, 454–460. [Google Scholar] [CrossRef]
- Ganchev, G.; Milousheva, V. General rotational surfaces in the 4-dimensional Minkowski space. Turk. J. Math. 2014, 38, 883–895. [Google Scholar] [CrossRef]
- Dillen, F.; Fastenakels, J.; Van der Veken, J. Rotation hypersurfaces of and . Note Mat. 2009, 29-1, 41–54. [Google Scholar]
- Senoussi, B.; Bekkar, M. Helicoidal surfaces with ΔJr = Ar in 3-dimensional Euclidean space. Stud. Univ. Babeş-Bolyai Math. 2015, 60, 437–448. [Google Scholar]
- Bour, E. Théorie de la déformation des surfaces. J. Êcole Imp. Polytech. 1862, 22, 1–148. [Google Scholar]
- Do Carmo, M.; Dajczer, M. Helicoidal surfaces with constant mean curvature. Tohoku Math. J. 1982, 34, 351–367. [Google Scholar] [CrossRef]
- Güler, E. Bour’s theorem and light-like profile curve. Yokohama Math. J. 2007, 54, 155–157. [Google Scholar]
- Hieu, D.T.; Thang, N.N. Bour’s theorem in 4-dimensional Euclidean space. Bull. Korean Math. Soc. 2017, 54, 2081–2089. [Google Scholar]
- Choi, M.; Kim, Y.H.; Liu, H.; Yoon, D.W. Helicoidal surfaces and their Gauss map in Minkowski 3-space. Bull. Korean Math. Soc. 2010, 47, 859–881. [Google Scholar] [CrossRef]
- Choi, M.; Kim, Y.H. Characterization of the helicoid as ruled surfaces with pointwise 1-type Gauss map. Bull. Korean Math. Soc. 2001, 38, 753–761. [Google Scholar]
- Choi, M.; Yoon, D.W. Helicoidal surfaces of the third fundamental form in Minkowski 3-space. Bull. Korean Math. Soc. 2015, 52, 1569–1578. [Google Scholar] [CrossRef]
- Ferrandez, A.; Garay, O.J.; Lucas, P. On a Certain Class of Conformally at Euclidean Hypersurfaces. In Global Analysis and Global Differential Geometry; Springer: Berlin, Germany, 1990; pp. 48–54. [Google Scholar]
- Verstraelen, L.; Valrave, J.; Yaprak, Ş. The minimal translation surfaces in Euclidean space. Soochow J. Math. 1994, 20, 77–82. [Google Scholar]
- Güler, E.; Magid, M.; Yaylı, Y. Laplace Beltrami operator of a helicoidal hypersurface in four space. J. Geom. Symmetry Phys. 2016, 41, 77–95. [Google Scholar]
- Lawson, H.B. Lectures on Minimal Submanifolds, 2nd ed.; Mathematics Lecture Series 9; Publish or Perish, Inc.: Wilmington, Delaware, 1980. [Google Scholar]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).