CRCM: A New Combined Data Gathering and Energy Charging Model for WRSN

Abstract
1. Introduction
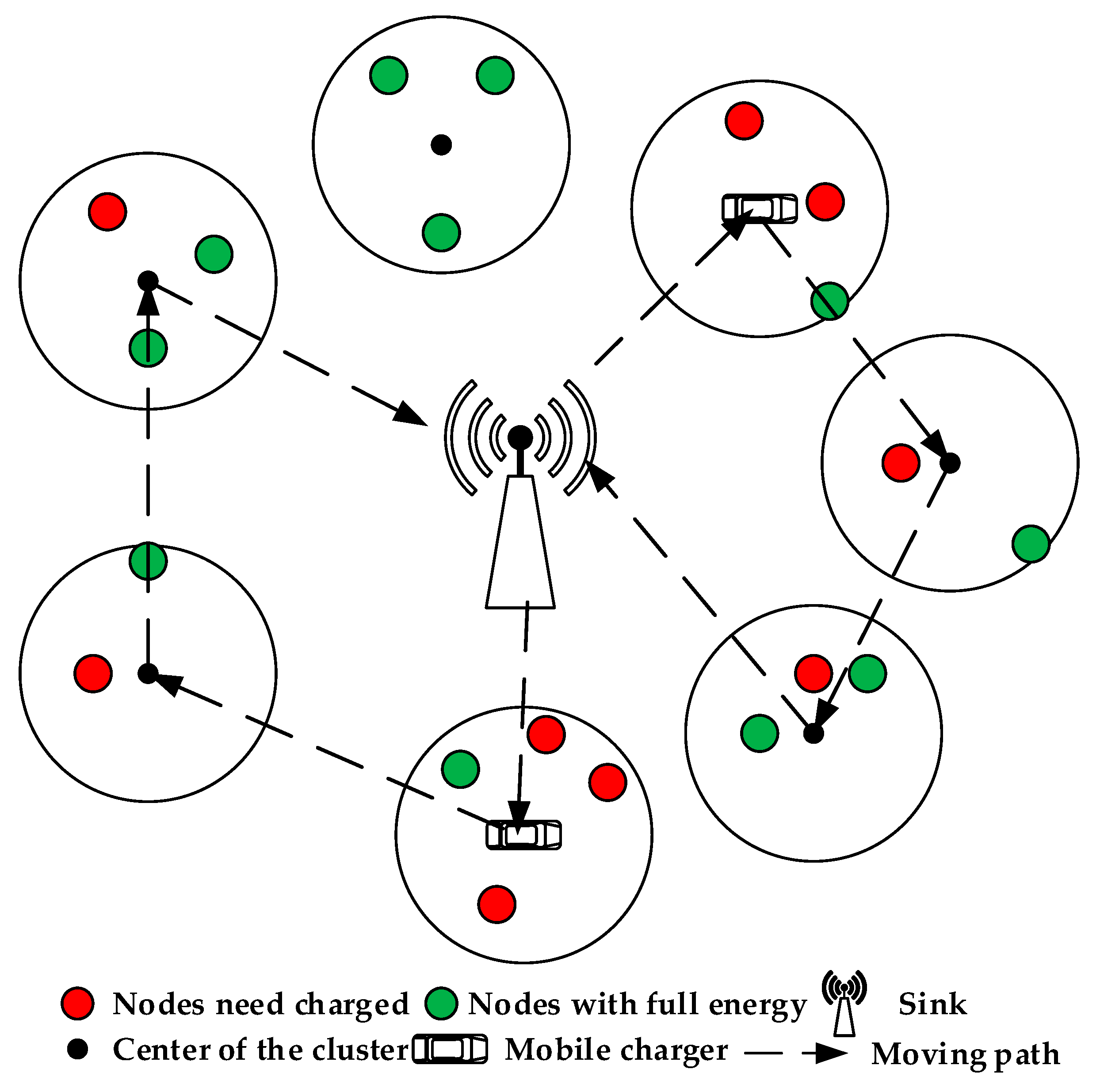
- To reduce the energy consumption to the largest extent, we consider the MC as a moving sink to gather sensing data from sensor nodes when charging them. A new recharging model, combined recharging and collecting data model on-demand (CRCM), was established in which the MC will recharge the on-demand sensor nodes and collect all of the data of the sensor nodes in the cluster at the same time.
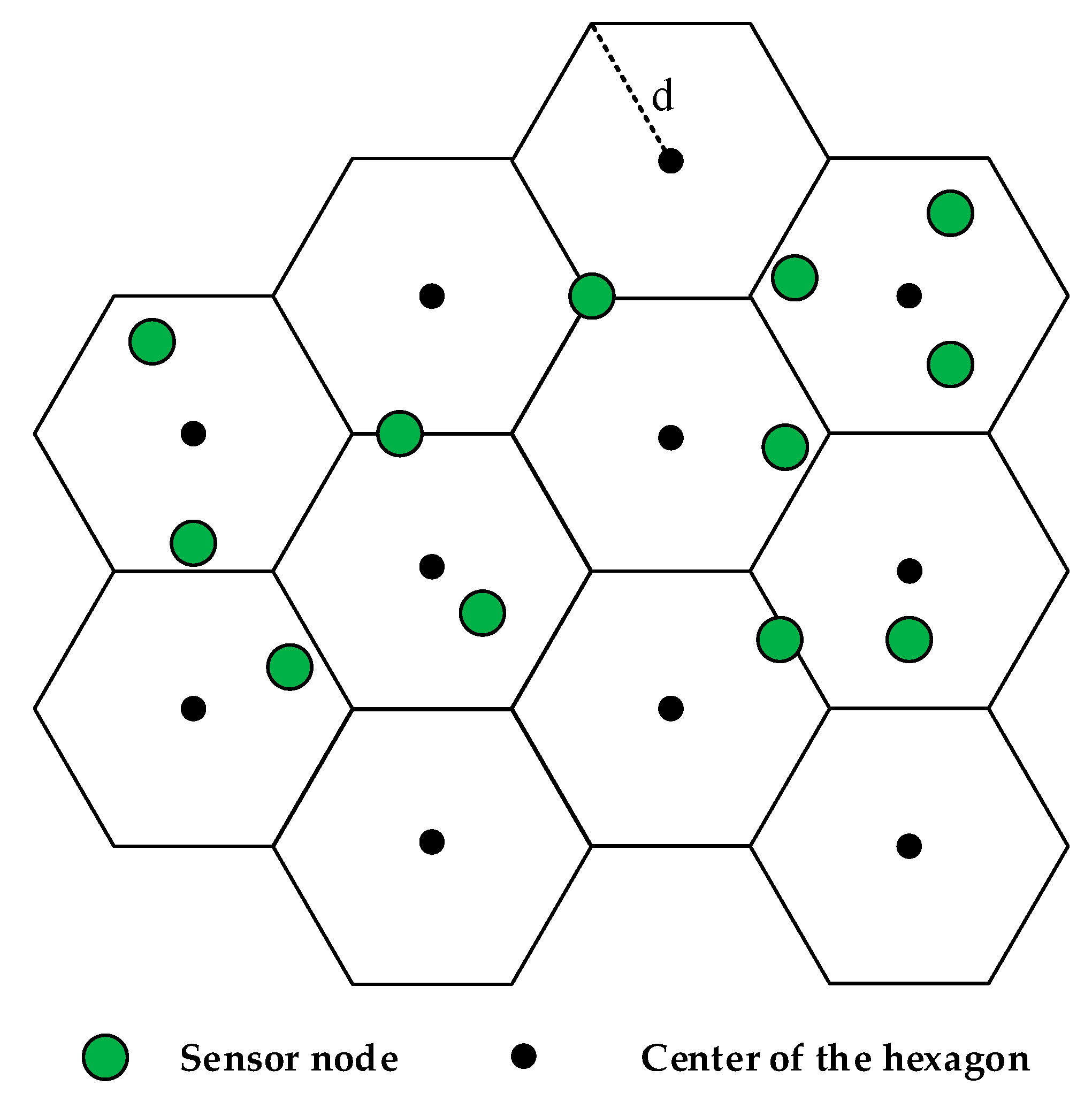
- To establish the CRCM, we have considered the hexagon-based [21] (HB) algorithm to sort all sensor nodes into different clusters. While NJNP cannot satisfy the scheduler with high charging efficiency to structure the charging path, we then consider both the residual energy and geographic position of each sensor node, the REGP algorithm is proposed to calculate the priority of each cluster, and the charging queue is ultimately established.
- In a large WRSN, we have also considered the multi-MC’s algorithm to adapt the increasing quantity of sensor nodes. To make sure no sensor nodes exhaust their energy while waiting for the next charging cycle, we have calculated the longest cycle time a MC can serve. The DMC algorithm is subsequently raised to solve the least number of MCs problem.
- The remainder of this paper is constituted as follows: in Section 2, we have discussed the related works about previous studies and experiments of WPT; in Section 3 we have shown the system model and three algorithms to solve the problems; then some simulations have been realized to compare each parameter to Earliest Deadline First (EDF) [22] and NJNP in Section 4; and, finally, we conclude this paper in Section 5.
2. Related Works
3. System Model and Proposed Scheme
3.1. System Model
3.2. Problem Formulation
3.3. The Hexagon-Based Algorithm
| Algorithm 1: Hexagon-Based Algorithm (HB) |
| 1: Initialization: sensor nodes and clusters |
| 2: for All do |
| 3: if then |
| 4: Bound the to the value of |
| 5: else if then |
| 6: Bound the and to the two values of |
| 7: else if then |
| 8: Bound the to the value of |
| 9: else if then |
| 10: Bound the and and to the three values of |
| 11: end if |
| 12: end for |
| 13: for All do |
| 14: if and and then |
| 15: |
| 16: else if and and then |
| 17: Select the cluster which is the closest to the sink, if the distance is equal, choose randomly from the two clusters, bound to the value of and to the value of 0 |
| 18: else if and and then |
| 19: Select the cluster which is the closest to the sink, if the distance is equal, choose randomly from the two or three clusters, bound to the value of and , to the value of 0 |
| 20: end if 21: end for |
3.4. The Residual Energy and Geographic Position Algorithm
| Algorithm 2: Residual Energy and Geographic Position Algorithm (REGP) |
| Input: The empty sequence of , sensor nodes and clusters |
| Output: The optimized charging sequence |
| 1: Let Sink be the head |
| 2: for All do |
| 3: if Energy of then |
| 4: , where |
| 5: end if |
| 6: end for |
| 7: while Exiting do |
| 8: for All do |
| 9: if then |
| 10: Calculate the and find the largest of |
| 11: |
| 12: |
| 13: end if |
| 14: end for |
| 15: end while |
| 16: return |
3.5. The Dynamic Mobile Charger Algorithm
| Algorithm 3: Dynamic Mobile Charger Algorithm (DMC) | |||
| Input: The sequence of , count number and the length of | |||
| Output: The number of MCs | |||
| 1: | |||
| 2: | |||
| 3: Let as the length of | |||
| 4: for All do | |||
| 5: Calculate the waiting time | |||
| 6: end for | |||
| 7: while do | |||
| 8: if The residual time of cluster and then | |||
| 9: | |||
| 10: else | |||
| 11: Remove the elements from 2 to and update the | |||
| 12: | |||
| 13: | |||
| 14: Update the | |||
| 15: for All do | |||
| 16: Calculate the waiting time | |||
| 17: end for | |||
| 18: end if | |||
| 19: if then | |||
| 20: | |||
| 21: end if | |||
| 22: end while | |||
| 23: return | |||
4. Simulations
4.1. The Energy Change of a Sensor Node
4.2. Path Diagram of One Charging Cycle
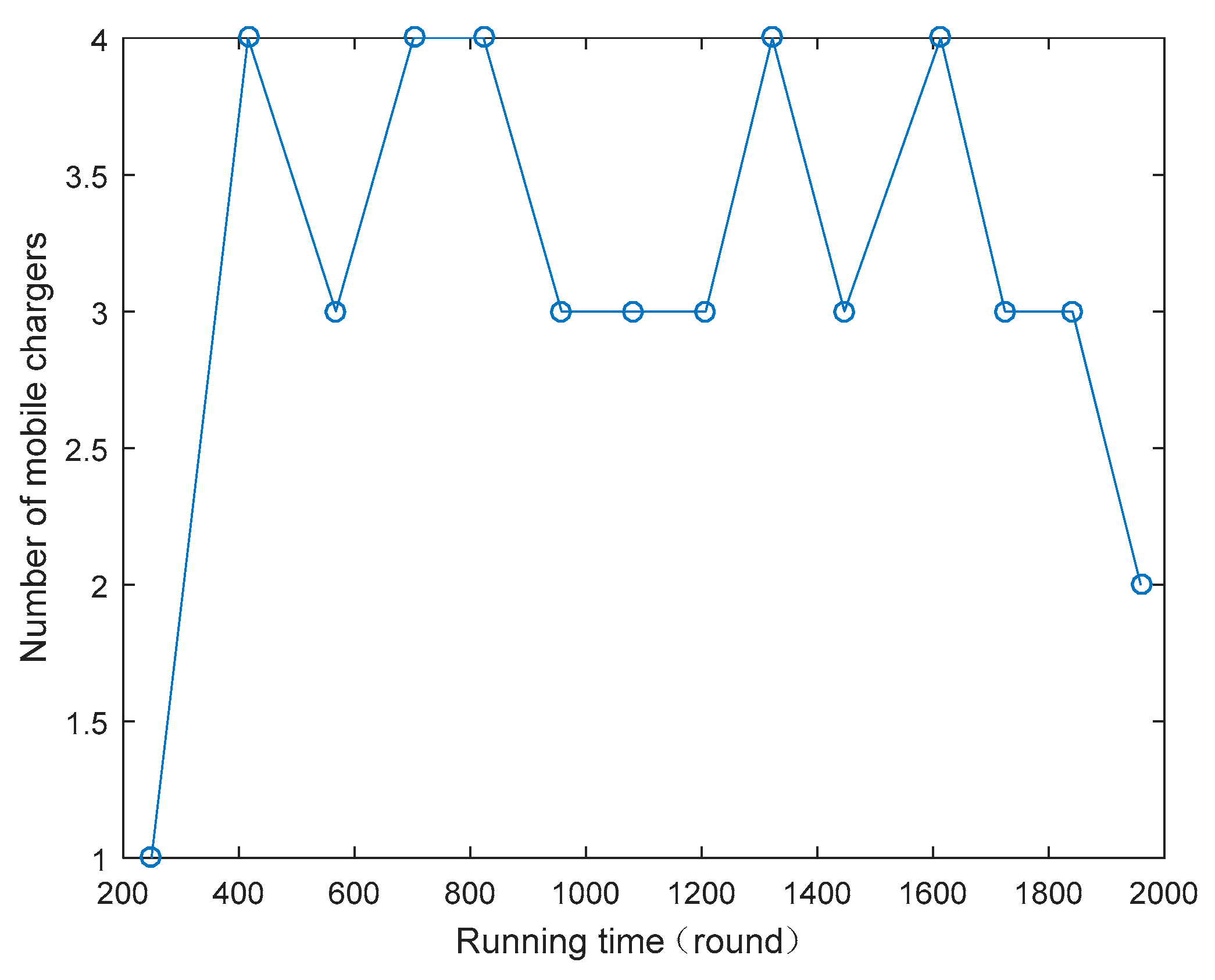
4.3. Number of MCs in Each Charging Cycle
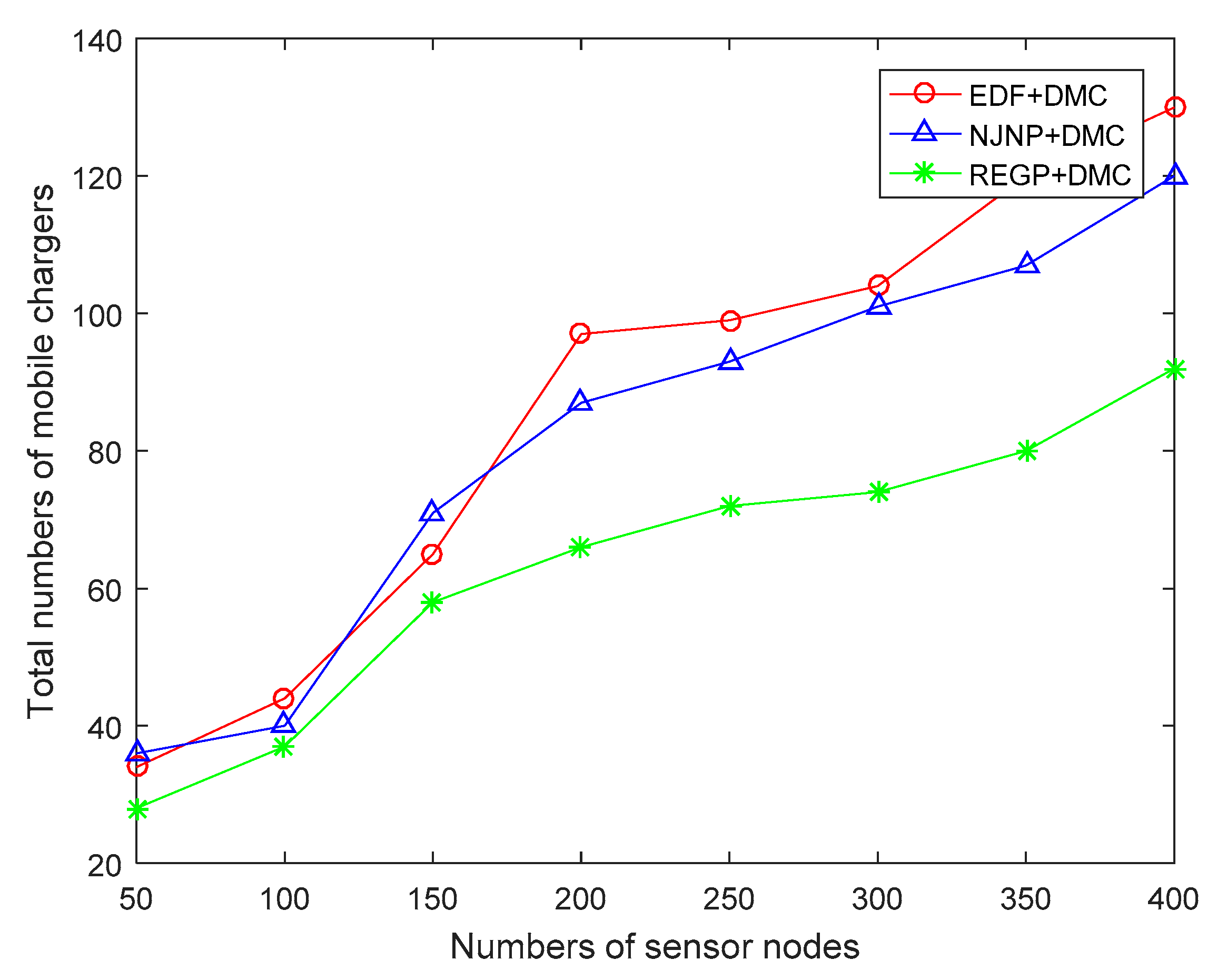
4.4. Total number of MCs in the Whole Process
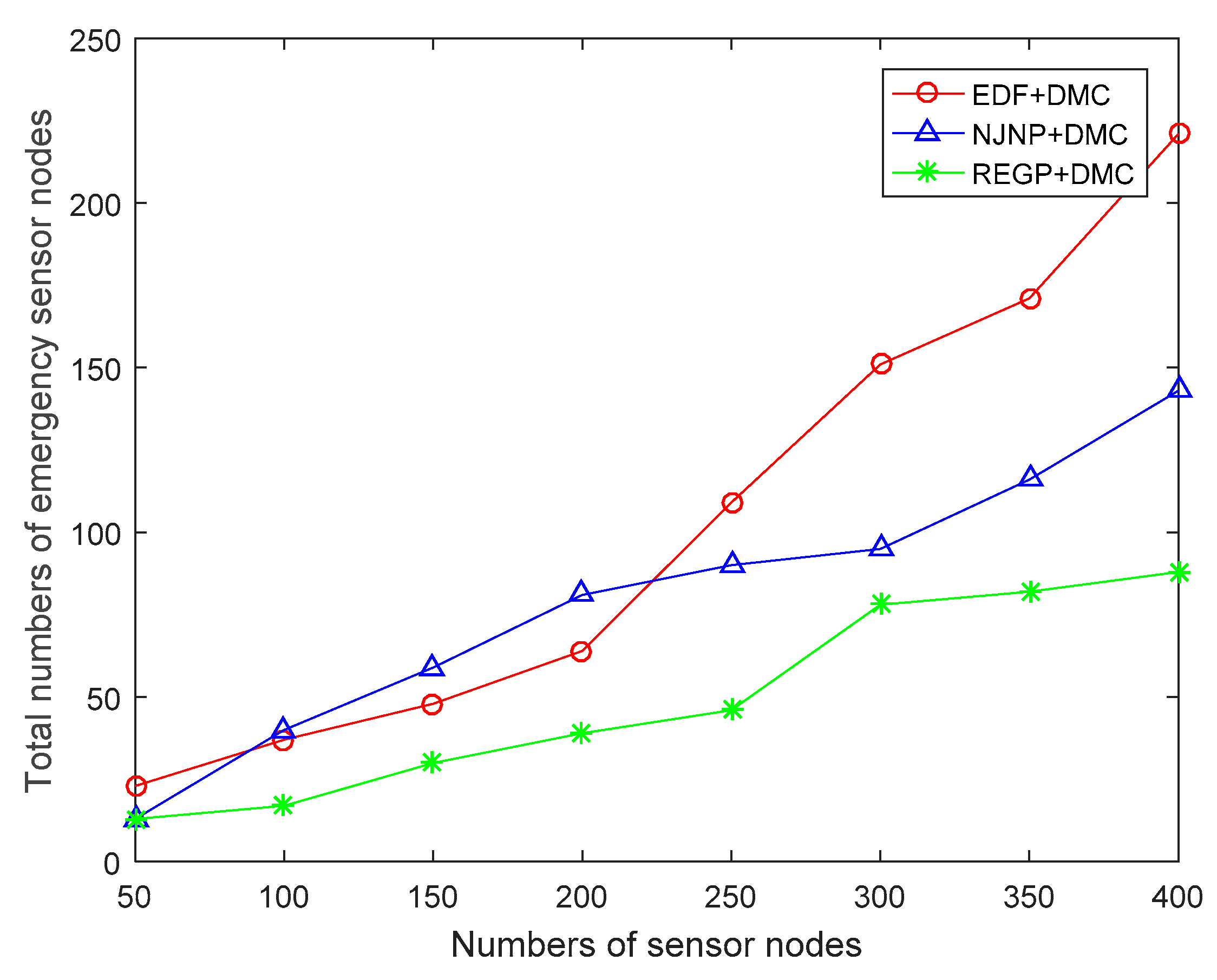
4.5. Total Number of Emergency Sensor Nodes in the Whole Process
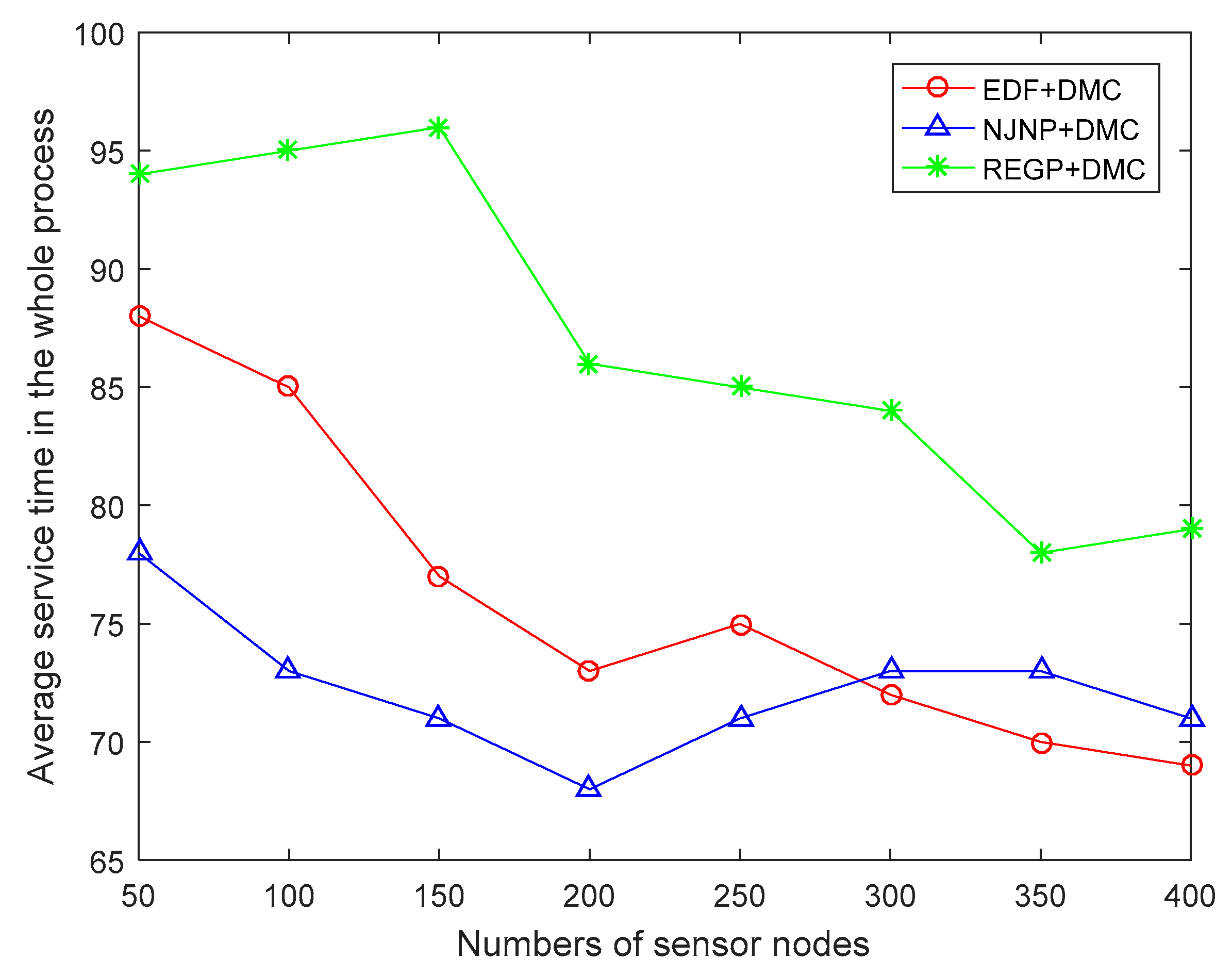
4.6. Average Serving Time of a MC in the Whole Process
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless sensor network survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Pottie, G.J.; Kaiser, W.J. Wireless integrated network sensors. Commun. ACM 2004, 43, 51–58. [Google Scholar] [CrossRef]
- Kansal, A.; Hsu, J.; Zahedi, S.; Srivastava, M.B. Power management in energy harvesting sensor networks. ACM Trans. Embed. Comput. Syst. 2007, 6, 32. [Google Scholar] [CrossRef]
- Gerla, M.; Tsai, J.T.C. Multicluster, mobile, multimedia radio network. Wirel. Netw. 1995, 1, 255–265. [Google Scholar] [CrossRef]
- Noh, D.K.; Kang, K. A Practical Flow Control Scheme Considering Optimal Energy Allocation in Solar-Powered WSNs. In Proceedings of the 2009 Proceedings of 18th International Conference on Computer Communications and Networks, San Francisco, CA, USA, 3–6 August 2009; pp. 1–6. [Google Scholar]
- Li, Y.; Fu, L.; Chen, M.; Chi, K.; Zhu, Y.H. RF-Based Charger Placement for Duty Cycle Guarantee in Battery-Free Sensor Networks. IEEE Commun. Lett. 2015, 19, 1802–1805. [Google Scholar] [CrossRef]
- Erol-Kantarci, M.; Mouftah, H.T. Challenges of wireless power transfer for prolonging User Equipment (UE) lifetime in wireless networks. In Proceedings of the 2014 IEEE 25th Annual International Symposium on Personal, Indoor, and Mobile Radio Communication (PIMRC), Washington, DC, USA, 2–5 September 2014; pp. 2140–2144. [Google Scholar]
- Tsiropoulou, E.E.; Mitsis, G.; Papavassiliou, S. Interest-aware Energy Collection & Resource Management in Machine to Machine Communications. Ad Hoc Netw. 2018, 68, 48–57. [Google Scholar]
- Xie, L.; Shi, Y.; Hou, Y.T.; Lou, A. Wireless power transfer and applications to sensor networks. IEEE Wirel. Commun. 2013, 20, 140–145. [Google Scholar]
- Shi, Y.; Xie, L.; Hou, Y.T.; Sherali, H.D. On renewable sensor networks with wireless energy transfer. In Proceedings of the 2011 Proceedings IEEE INFOCOM, Shanghai, China, 10–15 April 2011; pp. 1350–1358. [Google Scholar]
- Tong, B.; Li, Z.; Wang, G.; Zhang, W. How Wireless Power Charging Technology Affects Sensor Network Deployment and Routing. In Proceedings of the 2010 IEEE 30th International Conference on Distributed Computing Systems, Genova, Italy, 21–25 June 2010; pp. 438–447. [Google Scholar]
- Tsiropoulou, E.E.; Paruchuri, S.T.; Baras, J.S. Interest, Energy and Physical-Aware Coalition Formation and Resource Allocation in Smart IoT Applications. In Proceedings of the 2017 51st Annual Conference on Information Sciences and Systems (CISS), Baltimore, MD, USA, 22–24 March 2017; pp. 1–6. [Google Scholar]
- He, S.; Chen, J.; Jiang, F.; Yau, D.K.; Xing, G.; Sun, Y. Energy Provisioning in Wireless Rechargeable Sensor Networks. IEEE Trans. Mob. Comput. 2013, 12, 1931–1942. [Google Scholar] [CrossRef]
- Fu, L.; Cheng, P.; Gu, Y.; Chen, J.; He, T. Optimal Charging in Wireless Rechargeable Sensor Networks. IEEE Trans. Veh. Technol. 2016, 65, 278–291. [Google Scholar] [CrossRef]
- He, L.; Kong, L.; Gu, Y.; Pan, J.; Zhu, T. Evaluating the On-Demand Mobile Charging in Wireless Sensor Networks. IEEE Trans. Mob. Comput. 2015, 14, 1861–1875. [Google Scholar] [CrossRef]
- Liang, W.; Xu, W.; Ren, X.; Jia, X.; Lin, X. Maintaining Large-Scale Rechargeable Sensor Networks Perpetually via Multiple Mobile Charging Vehicles. ACM Trans. Sens. Netw. 2016, 12, 14. [Google Scholar] [CrossRef]
- Dai, H.; Wu, X.; Chen, G.; Xu, L.; Lin, S. Minimizing the number of mobile chargers for large-scale wireless rechargeable sensor networks. Comput. Commun. 2014, 46, 54–65. [Google Scholar] [CrossRef]
- Kar, K.; Krishnamurthy, A.; Jaggi, N. Dynamic node activation in networks of rechargeable sensors. In Proceedings of the IEEE 24th Annual Joint Conference of the IEEE Computer and Communications Societies, Miami, FL, USA, 13–17 March 2006; pp. 15–26. [Google Scholar]
- Lin, C.R.; Gerla, M. Adaptive clustering for mobile wireless networks. IEEE J. Sel. Areas Commun. 1997, 15, 1265–1275. [Google Scholar] [CrossRef]
- He, L.; Gu, Y.; Pan, J.; Zhu, T. On-demand Charging in Wireless Sensor Networks: Theories and Applications. In Proceedings of the 2013 IEEE 10th International Conference on Mobile Ad-Hoc and Sensor Systems, Hangzhou, China, 14–16 Octomber 2013; pp. 28–36. [Google Scholar]
- Xie, L.; Shi, Y.; Hou, Y.T.; Lou, W.; Sherali, H.D.; Midkiff, S.F. On renewable sensor networks with wireless energy transfer: The multi-node case. In Proceedings of the 2012 9th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), Seoul, Korea, 18–21 June 2012; pp. 10–18. [Google Scholar]
- Spuri, M.; Buttazzo, G.C. Efficient aperiodic service under earliest deadline scheduling. In Proceedings of the 1994 Real-Time Systems Symposium, Puerto Rico, USA, 7–9 December 1994; pp. 2–11. [Google Scholar]
- Karasabun, E.; Korpeoglu, I.; Aykanat, C. Active node determination for correlated data gathering in wireless sensor networks. Comput. Netw. 2013, 57, 1124–1138. [Google Scholar] [CrossRef]
- Liu, X.; Liu, A.; Li, Z.; Tian, S.; Choi, Y.J.; Sekiya, H.; Li, J. Distributed Cooperative Communication Nodes Control and Optimization Reliability for Resource-Constrained WSNs. Neurocomputing 2017, 270, 122–136. [Google Scholar] [CrossRef]
- Yang, S.; Yang, X.; McCann, J.A.; Zhang, T.; Liu, G.; Liu, Z. Distributed Networking in Autonomic Solar Powered Wireless Sensor Networks. IEEE J. Sel. Areas Commun. 2014, 31, 750–761. [Google Scholar] [CrossRef]
- Xie, L.; Shi, Y.; Hou, Y.T.; Lou, W.; Sherali, H.D. On traveling path and related problems for a mobile station in a rechargeable sensor network. In Proceedings of the 14th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Bangalore, India, 29 July–01 August 2013; pp. 109–118. [Google Scholar]
- Hu, C.; Wang, Y. Optimization of Charging and Data Collection in Wireless Rechargeable Sensor Networks. Int. Conf. Hum. Cent. Comput. 2016, 9567, 138–149. [Google Scholar]
- Liu, B.H.; Nguyen, N.T.; Pham, V.T.; Lin, Y.X. Novel methods for energy charging and data collection in wireless rechargeable sensor networks. Int. J. Commun. Syst. 2017, 30. [Google Scholar] [CrossRef]
- Guo, S.; Wang, C.; Yang, Y. Joint Mobile Data Gathering and Energy Provisioning in Wireless Rechargeable Sensor Networks. IEEE Trans. Mob. Comput. 2014, 13, 2836–2852. [Google Scholar] [CrossRef]
- Guo, S.; Wang, C.; Yang, Y. Mobile data gathering with Wireless Energy Replenishment in rechargeable sensor networks. In Proceedings of the IEEE INFOCOM, Turin, Italy, 14–19 April 2013; pp. 1932–1940. [Google Scholar]
- Li, J.; Zhao, M.; Yang, Y. OWER-MDG: A novel energy replenishment and data gathering mechanism in wireless rechargeable sensor networks. In Proceedings of the 2012 IEEE Global Communications Conference (GLOBECOM), Anaheim, CA, USA, 3–7 December 2012; pp. 5350–5355. [Google Scholar]
- Zhou, W.P. Research on Topology Control for Wireless Sensor Networks Based on Cellular Clustering. Master’s Thesis, University Of Anhui, Anhui, China, June 2010. [Google Scholar]
- Wang, Y.; Vuran, M.C.; Goddard, S. Stochastic Analysis of Energy Consumption in Wireless Sensor Networks. In Proceedings of the 2010 7th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), Boston, MA, USA, 21–25 June 2010; p. 154. [Google Scholar]
- TX91501, Powercaster: Pittsburgh, PA, 15238, USA. Available online: Http://www.powercastco.com. (accessed on 30 July 2018).
- Dai, H.; Liu, Y.; Chen, G.; Wu, X.; He, T. SCAPE: Safe Charging with Adjustable Power. In Proceedings of the 2014 IEEE 34th International Conference on Distributed Computing Systems, Madrid, Spain, 30 June–3 July 2014; pp. 439–448. [Google Scholar]
- Nittby, H.; Widegren, B.; Krogh, M.; Grafström, G.; Berlin, H.; Rehn, G.; Eberhardt, J.L.; Malmgren, L.; Persson, B.R.; Salford, L.G. Exposure to radiation from global system for mobile communications at 1,800 MHz significantly changes gene expression in rat hippocampus and cortex. Environmentalist 2008, 28, 458–465. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition |
|---|---|
| Sensor node | |
| Cluster | |
| Initial energy of each sensor node | |
| Residual energy of sensor node in cluster when reporting to the sink | |
| The length of the region | |
| Charging threshold | |
| The traveling velocity of MC | |
| The valid and farthest charging distance | |
| The serving time of cluster | |
| The time of data gathering in cluster | |
| The time of charging for sensor node | |
| The residual time of sensor node | |
| The waiting time for MC’s coming to cluster | |
| Charging rate of MC | |
| The energy consumption of sensor node | |
| The geographic position priority of cluster | |
| The residual energy priority of cluster | |
| The combined priority of cluster | |
| Charging efficiency of sensor node | |
| A charging cycle |
| Sensor Node | x1 | x2 | x3 |
|---|---|---|---|
| 1 | 0 | 0 | |
| 4 | 0 | 3 | |
| 5 | 6 | 0 | |
| 7 | 8 | 9 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Dong, Y.; Li, S.; Wu, H.; Cui, M. CRCM: A New Combined Data Gathering and Energy Charging Model for WRSN. Symmetry 2018, 10, 319. https://doi.org/10.3390/sym10080319
Wang Y, Dong Y, Li S, Wu H, Cui M. CRCM: A New Combined Data Gathering and Energy Charging Model for WRSN. Symmetry. 2018; 10(8):319. https://doi.org/10.3390/sym10080319
Chicago/Turabian StyleWang, Yuhou, Ying Dong, Shiyuan Li, Hao Wu, and Mengyao Cui. 2018. "CRCM: A New Combined Data Gathering and Energy Charging Model for WRSN" Symmetry 10, no. 8: 319. https://doi.org/10.3390/sym10080319
APA StyleWang, Y., Dong, Y., Li, S., Wu, H., & Cui, M. (2018). CRCM: A New Combined Data Gathering and Energy Charging Model for WRSN. Symmetry, 10(8), 319. https://doi.org/10.3390/sym10080319