Lie Symmetries of Nonlinear Parabolic-Elliptic Systems and Their Application to a Tumour Growth Model



Abstract
:1. Introduction
2. Form-Preserving Transformations for the Class of Systems (3)
3. Lie Symmetries of a Class of Parabolic-Elliptic Systems
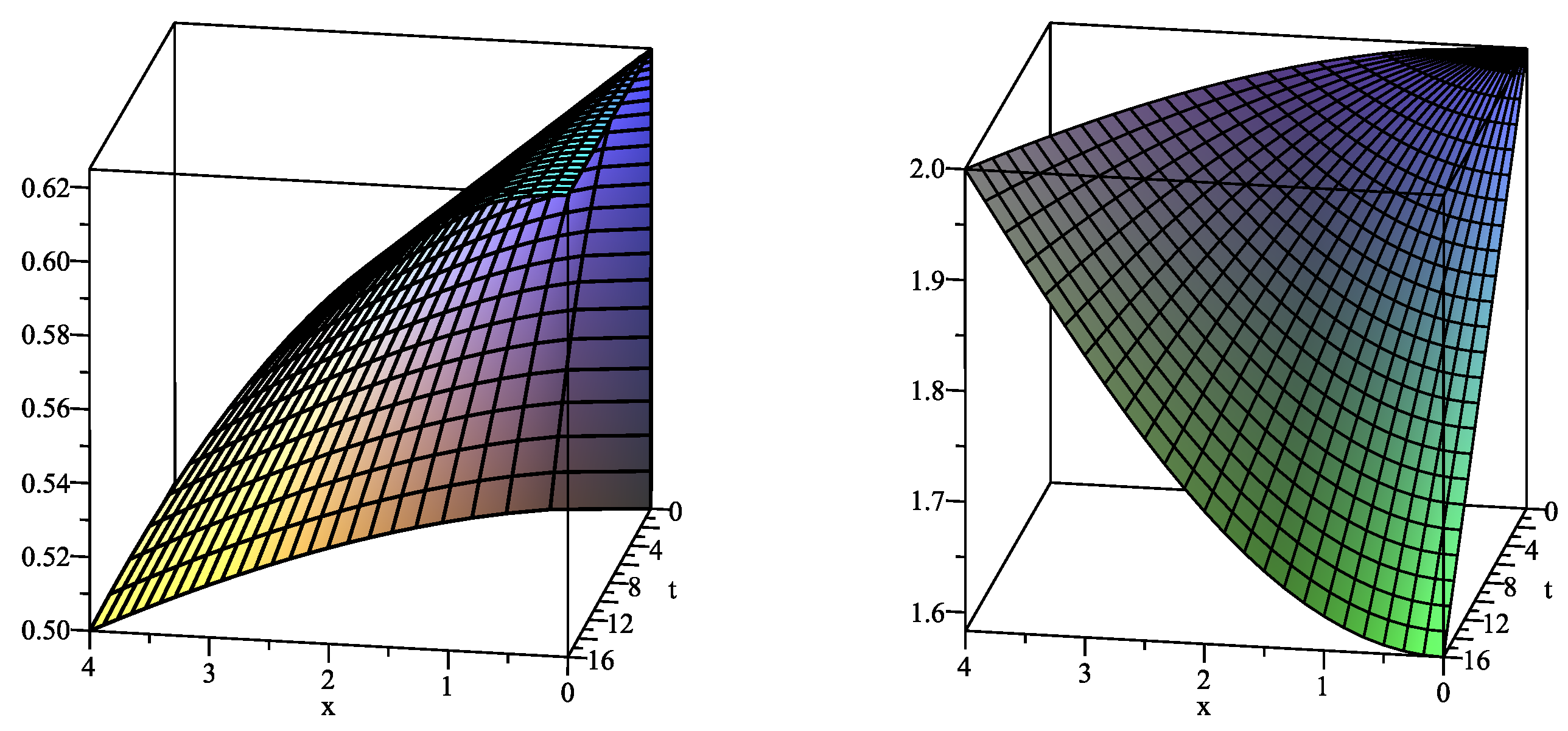
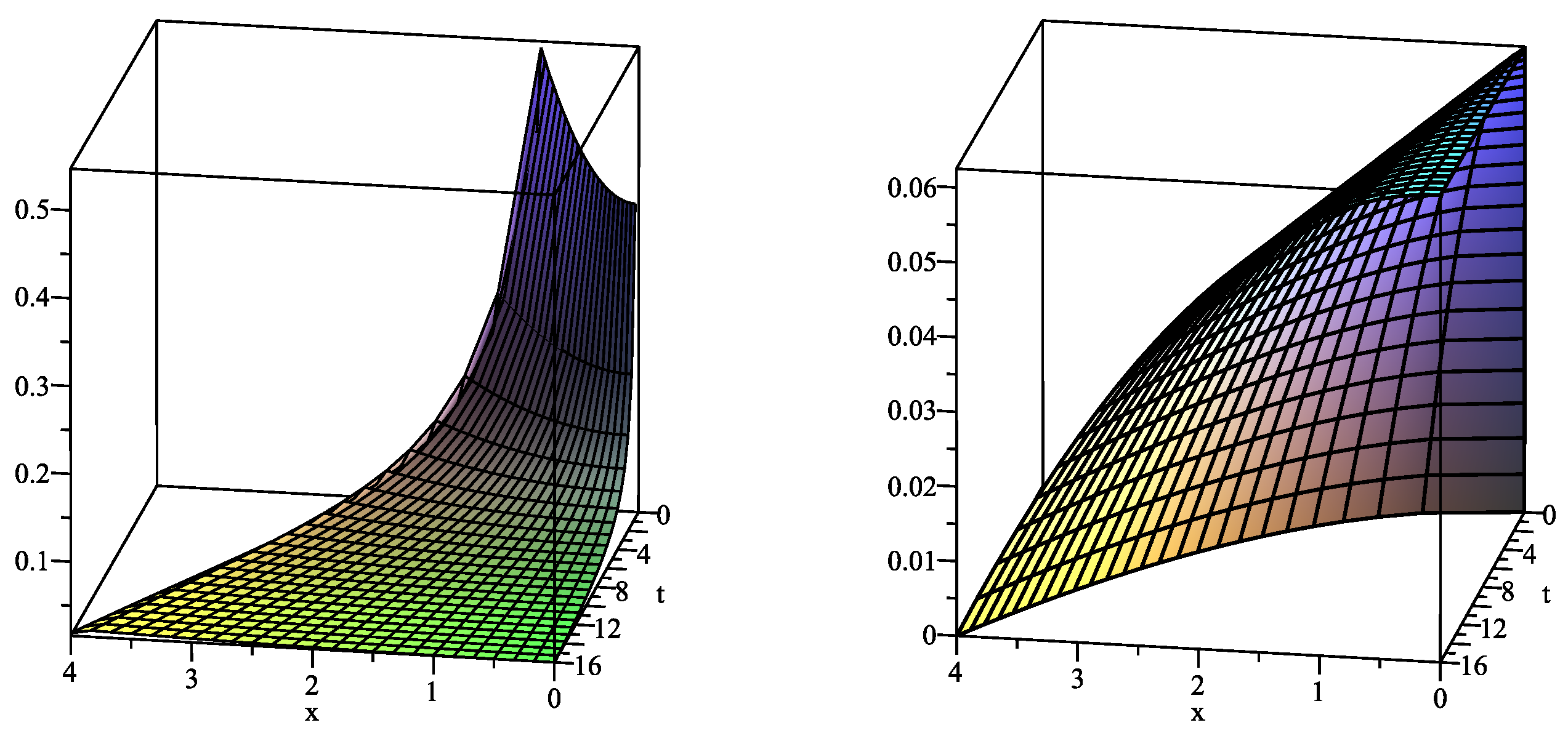
4. Boundary Value Problems for a One-Dimensional Tumour Growth Model with Negligible Cell Viscosity
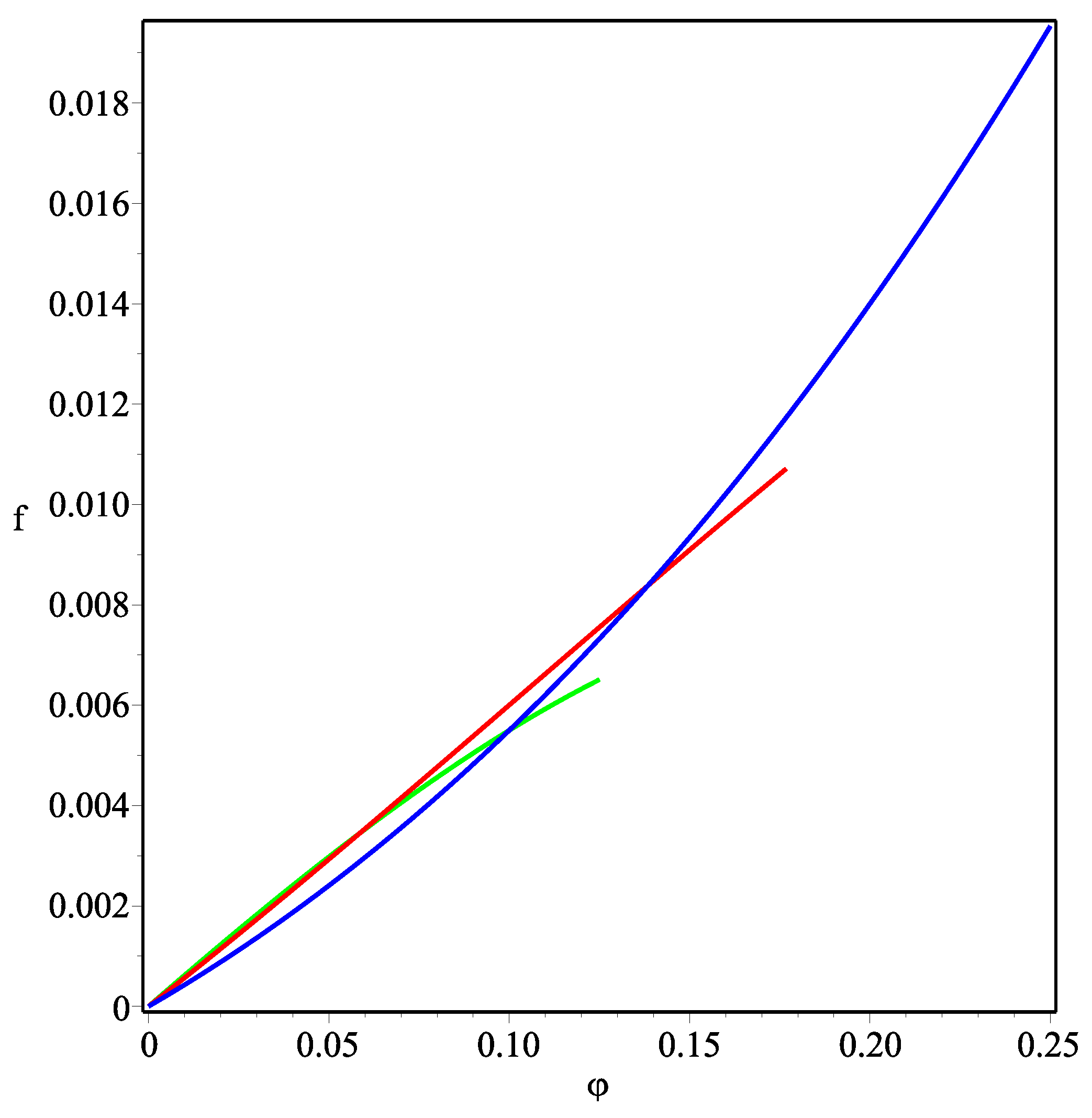
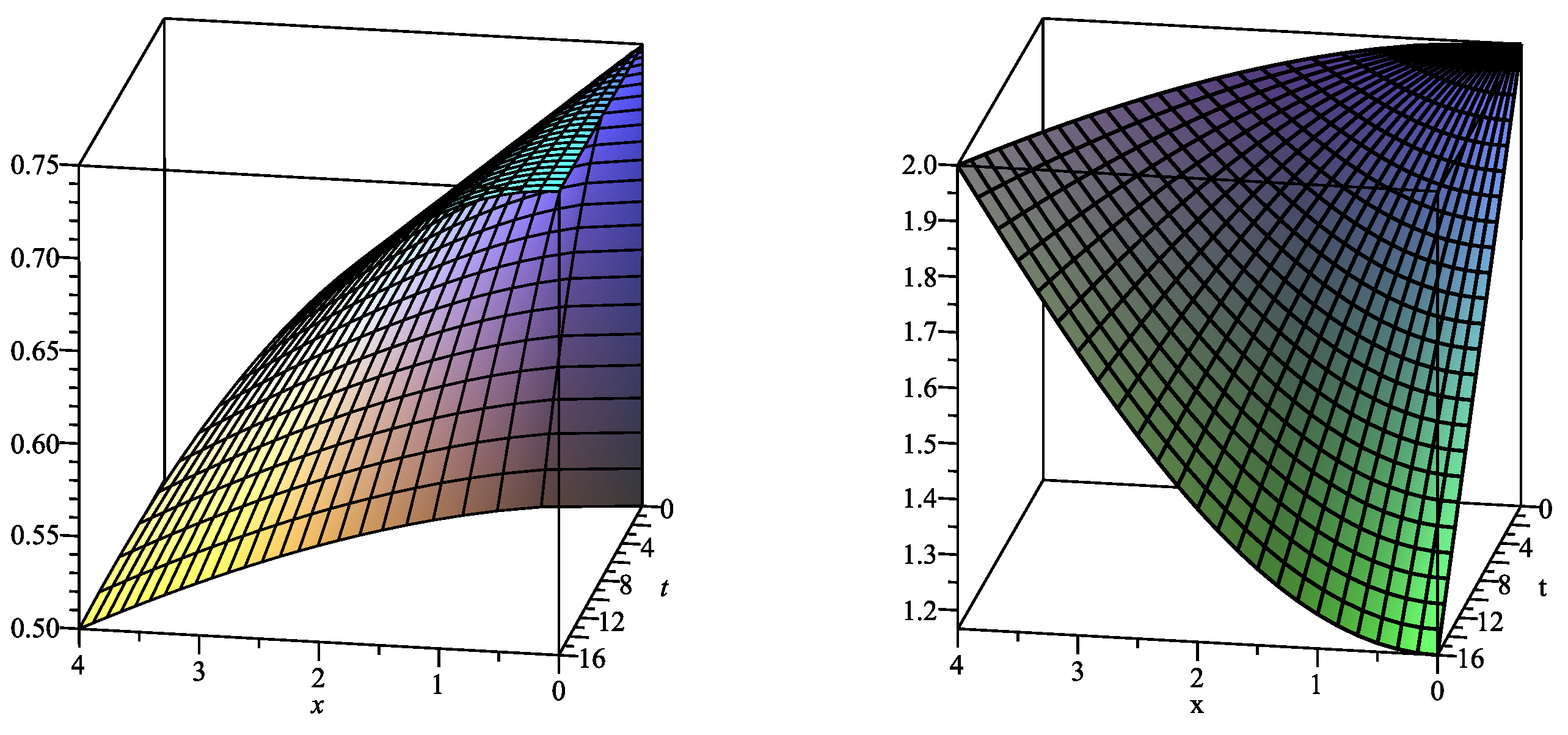
5. Higher-Dimensional Tumour Growth Model without Cell Viscosity
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Ames, W.F. Nonlinear Partial Differential Equations in Engineering; Academic: New York, NY, USA, 1972; ISBN 9780080955247. [Google Scholar]
- Murray, J.D. Mathematical Biology; Springer: Berlin, Germany, 1989. [Google Scholar]
- Murray, J.D. Mathematical Biology, II: Spatial Models and Biomedical Applications; Springer: Berlin, Germany, 2003. [Google Scholar]
- Okubo, A.; Levin, S.A. Diffusion and Ecological Problems. Modern Perspectives, 2nd ed.; Springer: Berlin, Germany, 2001. [Google Scholar]
- Lotka, A.J. Undamped oscillations derived from the law of mass action. J. Am. Chem. Soc. 1920, 42, 1595–1599. [Google Scholar] [CrossRef]
- Volterra, V. Variazionie fluttuazioni del numero d’individui in specie animali conviventi. Mem. Acad. Lincei 1926, 2, 31–113. (In Italian) [Google Scholar]
- Turing, A.M. The chemical basis of morphogenesis. Philos. Trans. R. Soc. B 1952, 237, 37–72. [Google Scholar] [CrossRef]
- Zulehner, W.; Ames, W.F. Group analysis of a semilinear vector diffusion equation. Nonlinear Anal. 1983, 7, 945–969. [Google Scholar] [CrossRef]
- Cherniha, R.; King, J.R. Lie symmetries of nonlinear multidimensional reaction-diffusion systems: I. J. Phys. A Math. Gen. 2000, 33, 267–282. [Google Scholar] [CrossRef]
- Cherniha, R.; King, J.R. Addendum: Lie symmetries of nonlinear multidimensional reaction-dfiffusion systems: I. J. Phys. A Math. Gen. 2000, 33, 7839–7841. [Google Scholar] [CrossRef]
- Cherniha, R.; King, J.R. Lie symmetries of nonlinear multidimensional reaction-diffusion systems: II. J. Phys. A Math. Gen. 2003, 36, 405–425. [Google Scholar] [CrossRef]
- Knyazeva, I.V.; Popov, M.D. A system of two diffusion equations. In CRC Handbook of Lie Group Analysis of Differential Equations; CRC Press: Boca Raton, FL, USA, 1994; Volume 1, pp. 171–176. [Google Scholar]
- Cherniha, R.; King, J.R. Non-linear reaction-diffusion systems with variable diffusivities: Lie symmetries, ansatze and exact solutions. J. Math. Anal. Appl. 2005, 308, 11–35. [Google Scholar] [CrossRef]
- Cherniha, R.; King, J.R. Lie symmetries and conservation laws of non-linear multidimensional reaction–diffusion systems with variable diffusivities. IMA J. Appl. Math. 2006, 71, 391–408. [Google Scholar] [CrossRef]
- Torrisi, M.; Tracina, R. An application of equivalence transformations to reaction diffusion equations. Symmetry 2015, 7, 1929–1944. [Google Scholar] [CrossRef]
- Byrne, H.; King, J.R.; McElwain, D.L.S.; Preziosi, L. A two-phase model of solid tumour growth. Appl. Math. Lett. 2003, 16, 567–573. [Google Scholar] [CrossRef]
- Ovsiannikov, L.V. Group relations of the equation of non-linear heat conductivity. Dokl. Akad. Nauk SSSR 1959, 125, 492–495. (In Russian) [Google Scholar]
- Kingston, J.G. On point transformations of evolution equations. J. Phys. A Math. Gen. 1991, 24, L769–L774. [Google Scholar] [CrossRef]
- Kingston, J.G.; Sophocleous, C. On form-preserving point transformations of partial differential equations. J. Phys. A Math. Gen. 1998, 31, 1597–1619. [Google Scholar] [CrossRef]
- Niederer, U. Schrödinger invariant generalised heat equation. Helv. Phys. Acta 1978, 51, 220–239. [Google Scholar]
- Gazeau, J.P.; Winternitz, P. Symmetries of variable coefficient Korteweg-de Vries equations. J. Math. Phys. 1992, 33, 4087–4102. [Google Scholar] [CrossRef]
- Ames, W.F.; Anderson, R.L.; Dorodnitsyn, V.A.; Ferapontov, E.V.; Gazizov, R.K.; Ibragimov, N.H.; Svirshchevskiy, S.R. CRC Handbook of Lie Group Analysis of Differential Equations, vol. 1. Symmetries, Exact Solutions And Conservation Laws; CRC Press: Boca Raton, FL, USA, 1994; pp. 133–136. [Google Scholar]
- Cherniha, R.; Serov, M. Symmetries, ansätze and exact solutions of nonlinear second-order evolution equations with convection term. Eur. J. Appl. Math. 1998, 9, 527–542. [Google Scholar] [CrossRef]
- Cherniha, R.; Serov, M.; Rassokha, I. Lie symmetries and form-preserving transformations of reaction-diffusion-convection equations. J. Math. Anal. Appl. 2008, 342, 1363–1379. [Google Scholar] [CrossRef]
- Cherniha, R.; Serov, M.; Pliukhin, O. Nonlinear Reaction-Diffusion-Convection Equations: Lie and Conditional Symmetry, Exact Solutions and Their Applications; CRC Press Taylor and Francis Group: Boka Raton, FL, USA, 2018; ISBN 9781498776172. [Google Scholar]
- Cherniha, R.; Davydovych, V. Reaction-diffusion systems with constant diffusivities: Conditional symmetries and form-preserving transformations. In Algebra, Geometry and Mathematical Physics; Springer: Berlin/Heidelberg, Germany, 2014; Volume 85, pp. 533–553. [Google Scholar]
- Arrigo, D.J. Symmetry Analysis of Differential Equations: An Introduction; John Wiley and Sons: Hoboken, NJ, USA, 2015; ISBN 9781118721445. [Google Scholar]
- Bluman, G.W.; Anco, S.C. Symmetry and Integration Methods for Differential Equations; Springer: New York, NY, USA, 2002; ISBN 9780387216492. [Google Scholar]
- Bluman, G.W.; Kumei, S. Symmetries and Differential Equations; Springer: Berlin, Germany, 1989. [Google Scholar]
- Fushchych, W.I.; Shtelen, W.M.; Serov, M.I. Symmetry Analysis and Exact Solutions of Equations of Nonlinear Mathematical Physics; Kluwer: Dordrecht, The Netherlands, 1993. [Google Scholar]
- Olver, P.J. Applications of Lie Groups to Differential Equations; Springer: Berlin, Germany, 1986; ISBN 978-1-4684-0274-2. [Google Scholar]
- Cherniha, R.; Kovalenko, S. Lie symmetries and reductions of multi-dimensional boundary value problems of the Stefan type. J. Phys. A Math. Theor. 2011, 44, 485202. [Google Scholar] [CrossRef]
- Cherniha, R.; King, J.R. Lie and Conditional Symmetries of a Class of Nonlinear (1 + 2)—Dimensional Boundary Value Problems. Symmetry 2015, 7, 1410–1435. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | RD System | Basic Operators of MAI |
|---|---|---|
| 1. | ||
| 2. | ||
| 3. | ||
| 4. | ||
| 5. | ||
| 6. | ||
| 7. | ||
| 8. | ||
| 9. | ||
| 10. | ||
| 11. | ||
| 12. | ||
| 13. | ||
| 14. | ||
| Case | RD System | Basic Operators of MAI |
|---|---|---|
| 1. | ||
| 2. | ||
| 3. | ||
| 4. | ||
| 5. | ||
| 6. | ||
| 7. | ||
| 8. | ||
| 9. | ||
| 10. | ||
| 11. | ||
| 12. | ||
| 13. | ||
| 14. | ||
| 15. | ||
| 16. | ||
| 17. | ||
| 18. | ||
| 19. | ||
| 20. | ||
| 21. | ||
| RD System | Transformation of Variables | Case of Table 1 | |
|---|---|---|---|
| 1. | 3 | ||
| with | |||
| 2. | 4 | ||
| with | |||
| 3. | 8 | ||
| 4. | 8 | ||
| 5. | 9 | ||
| 6. | 9 | ||
| 7. | 10 | ||
| with | |||
| 8. | 11 | ||
| with |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cherniha, R.; Davydovych, V.; King, J.R. Lie Symmetries of Nonlinear Parabolic-Elliptic Systems and Their Application to a Tumour Growth Model. Symmetry 2018, 10, 171. https://doi.org/10.3390/sym10050171
Cherniha R, Davydovych V, King JR. Lie Symmetries of Nonlinear Parabolic-Elliptic Systems and Their Application to a Tumour Growth Model. Symmetry. 2018; 10(5):171. https://doi.org/10.3390/sym10050171
Chicago/Turabian StyleCherniha, Roman, Vasyl’ Davydovych, and John R. King. 2018. "Lie Symmetries of Nonlinear Parabolic-Elliptic Systems and Their Application to a Tumour Growth Model" Symmetry 10, no. 5: 171. https://doi.org/10.3390/sym10050171
APA StyleCherniha, R., Davydovych, V., & King, J. R. (2018). Lie Symmetries of Nonlinear Parabolic-Elliptic Systems and Their Application to a Tumour Growth Model. Symmetry, 10(5), 171. https://doi.org/10.3390/sym10050171