Force Loading Tracking Control of an Electro-Hydraulic Actuator Based on a Nonlinear Adaptive Fuzzy Backstepping Control Scheme

 ,
,
Abstract
:1. Introduction
2. Experimental Set Up and Dynamic Model
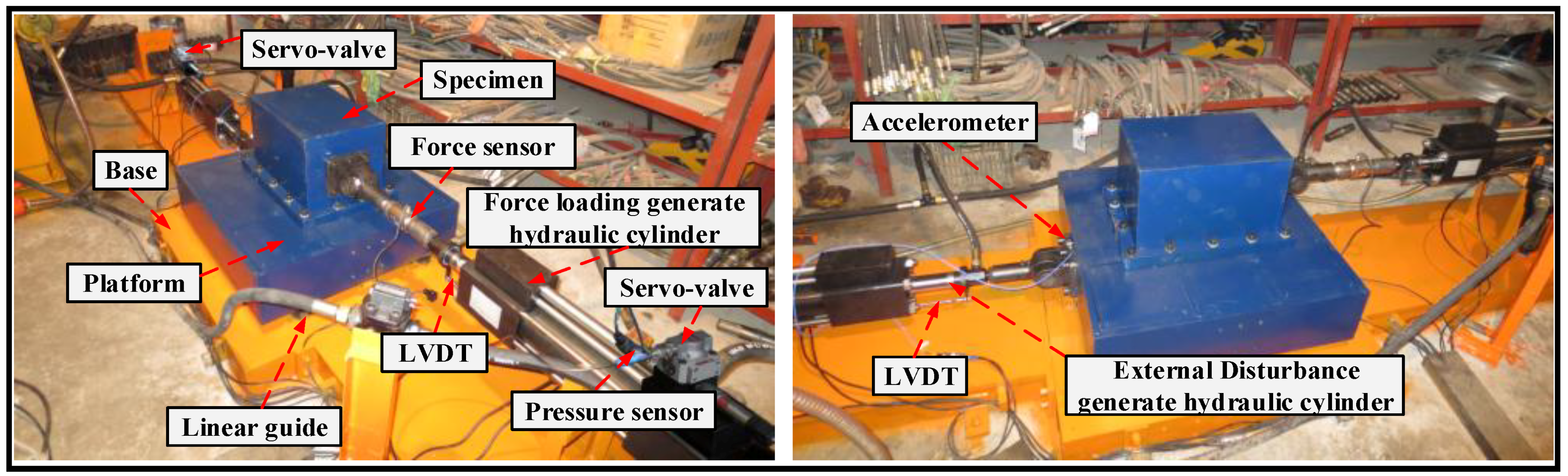
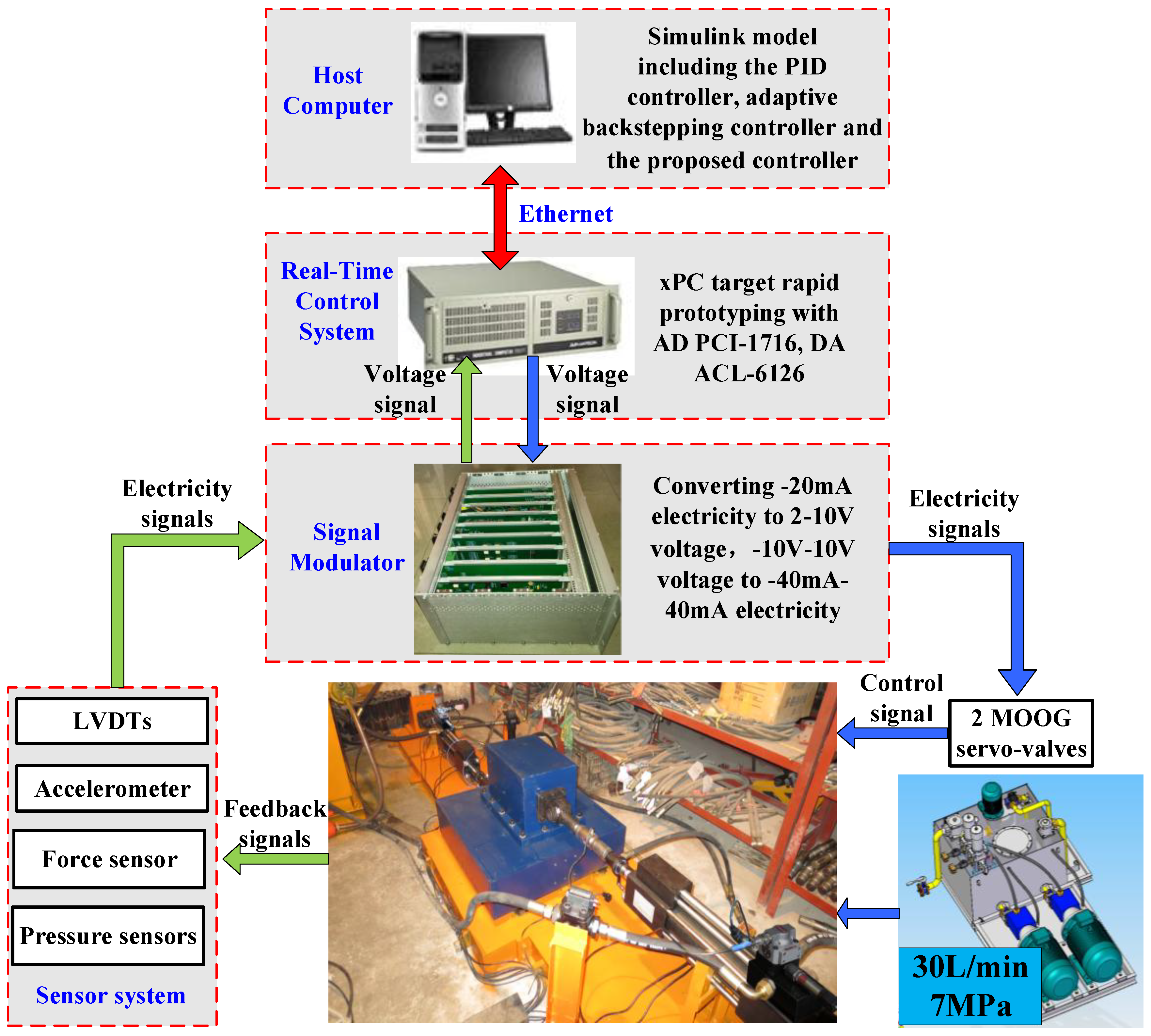
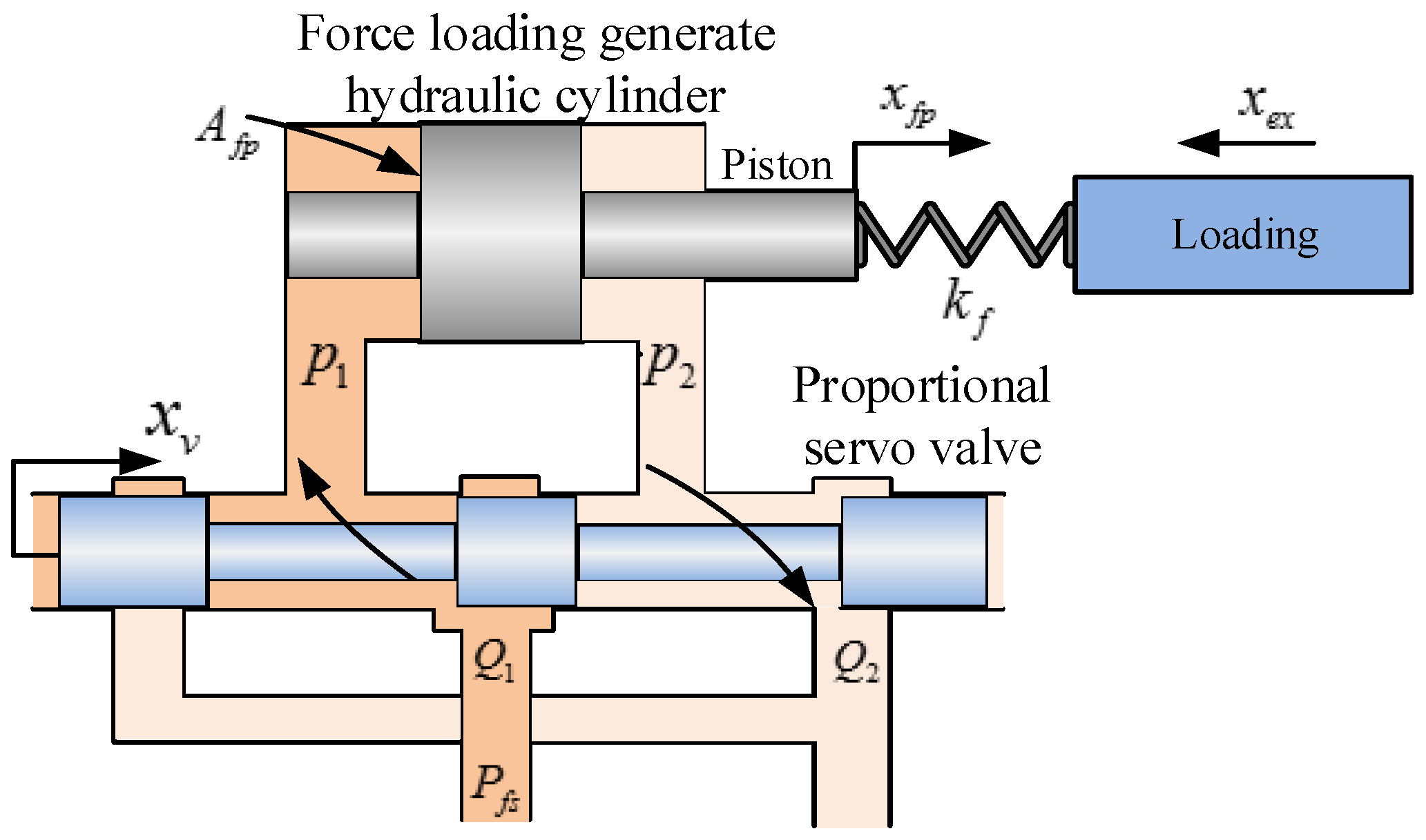
2.1. Experimental Setup of the EHFLS
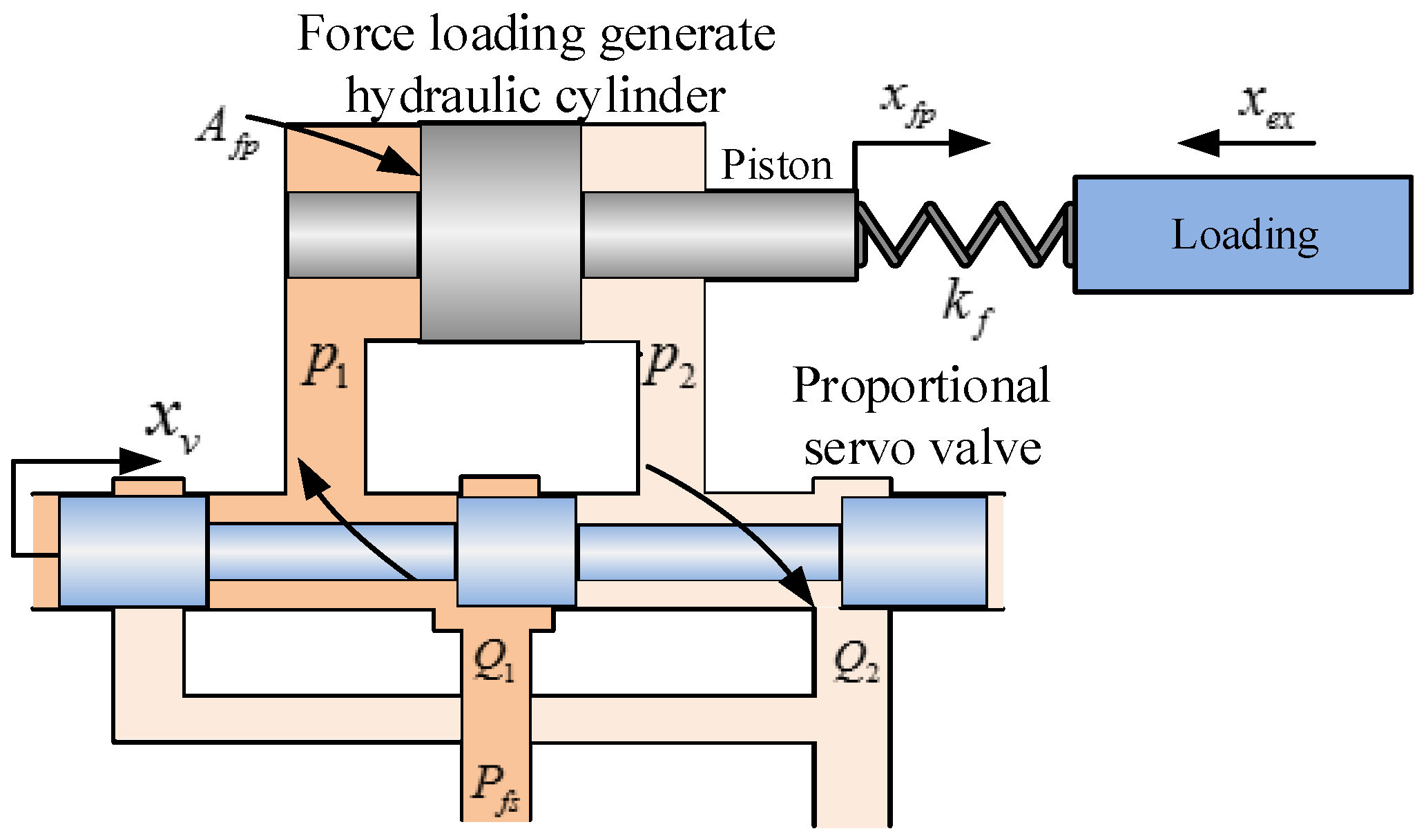
2.2. Dynamic Model of the EHFLS
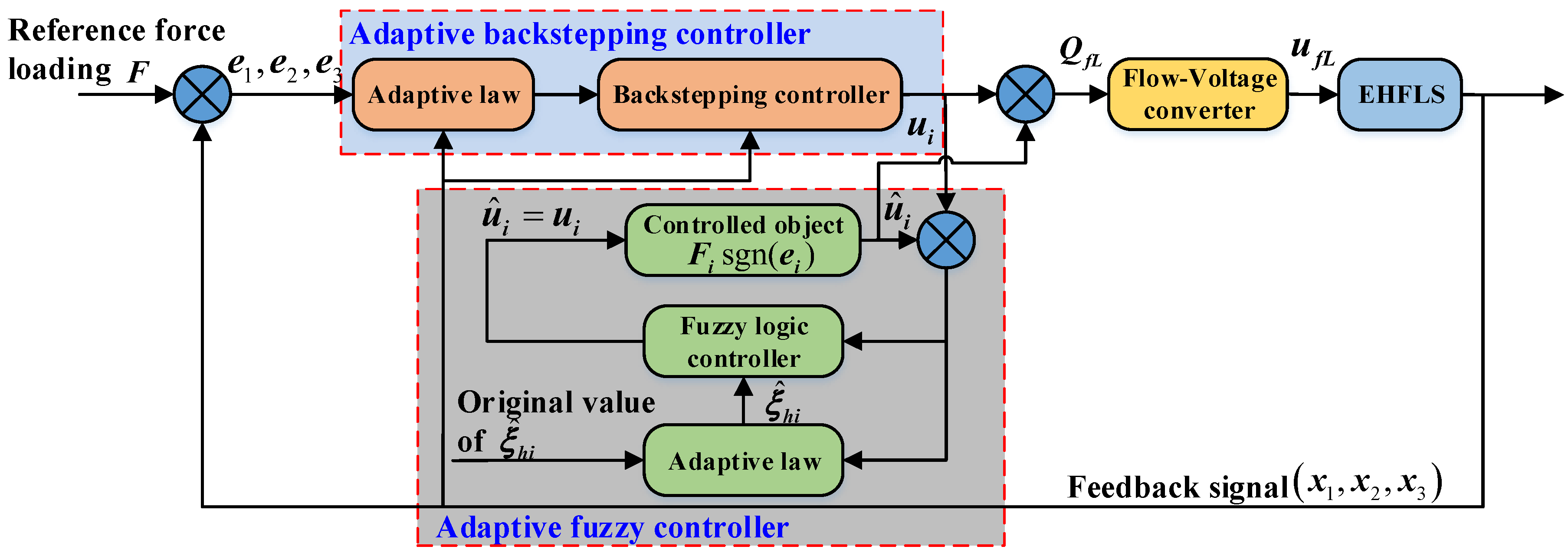
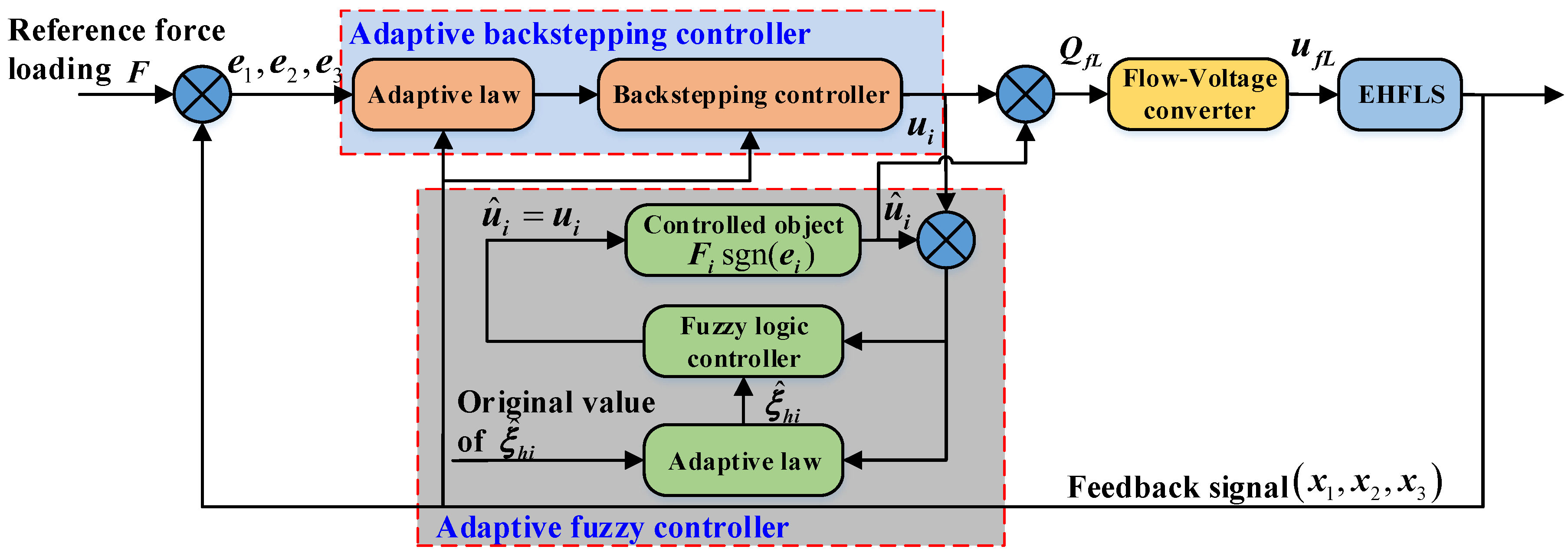
3. Controller Design
3.1. Adaptive Backstepping Controller
3.2. Adaptive Fuzzy Controller
- Step 1
- Define fuzzy set to state variables (in this work, the order of the state space form of is 1, so ).
- Step 2
- The control output of fuzzy system can be expressed as by employing the strategy of product inference engine, singleton fuzzifier, and center average defuzzifier:where is the membership function of the state variable, and is a free parameter in the fuzzy set.
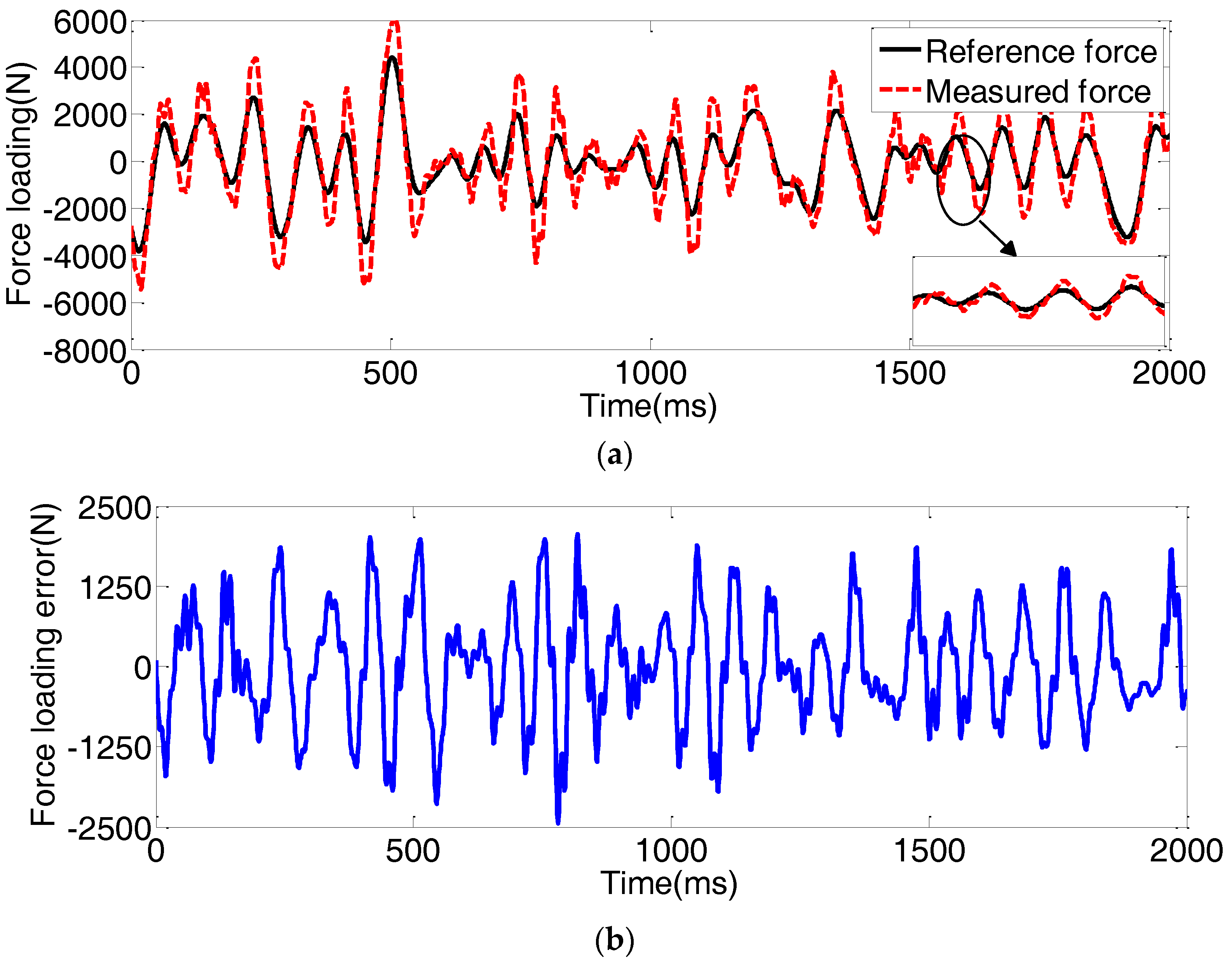
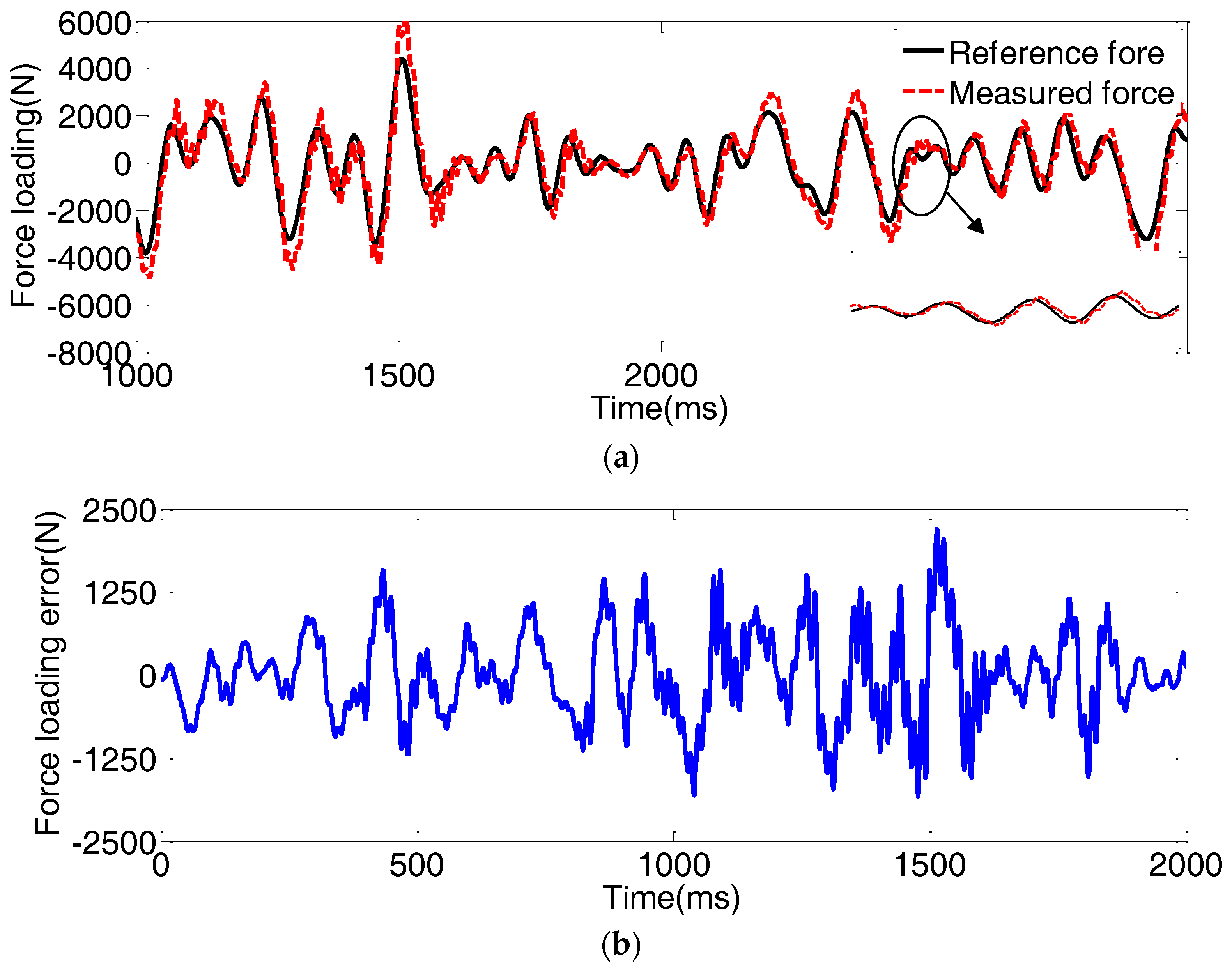
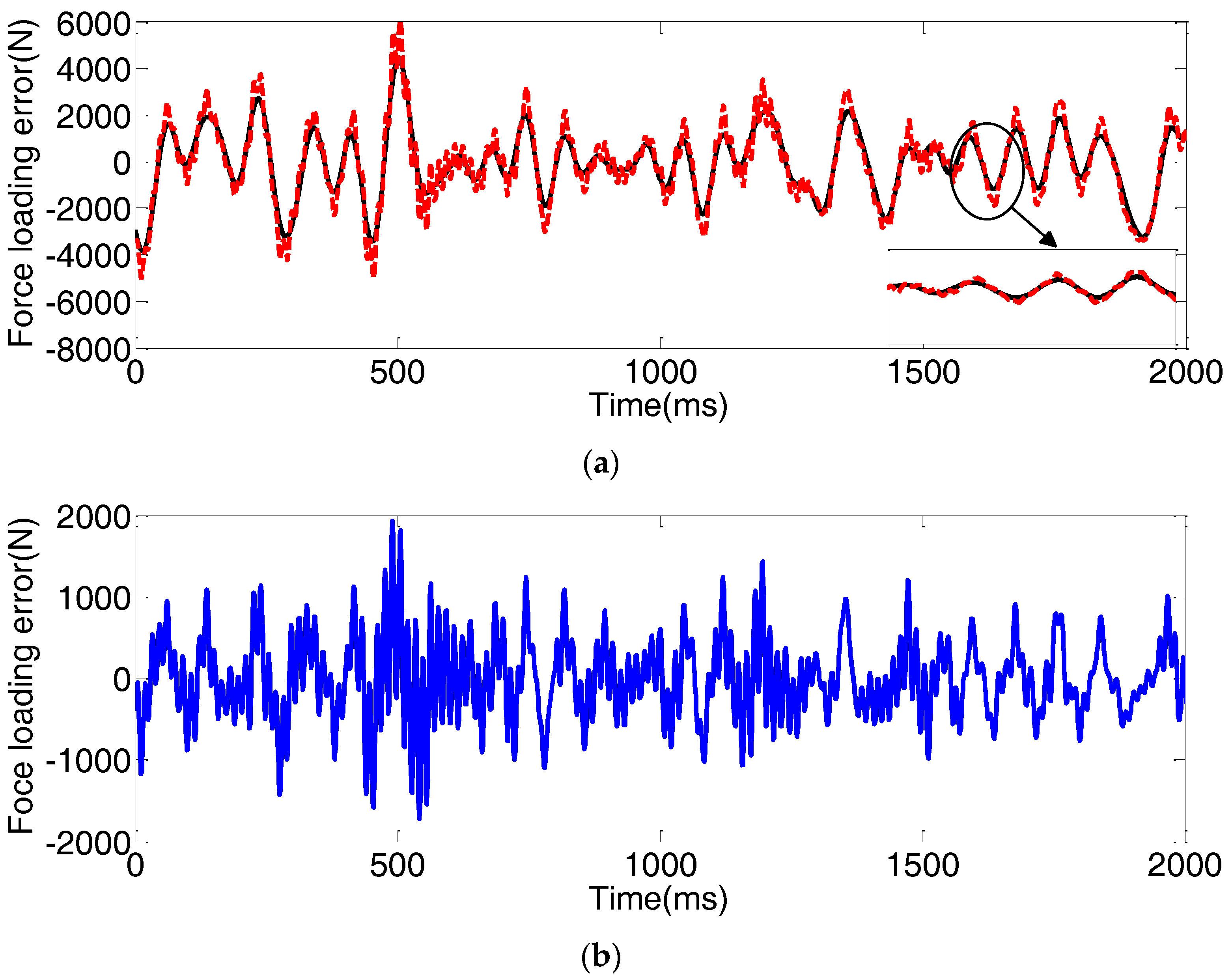
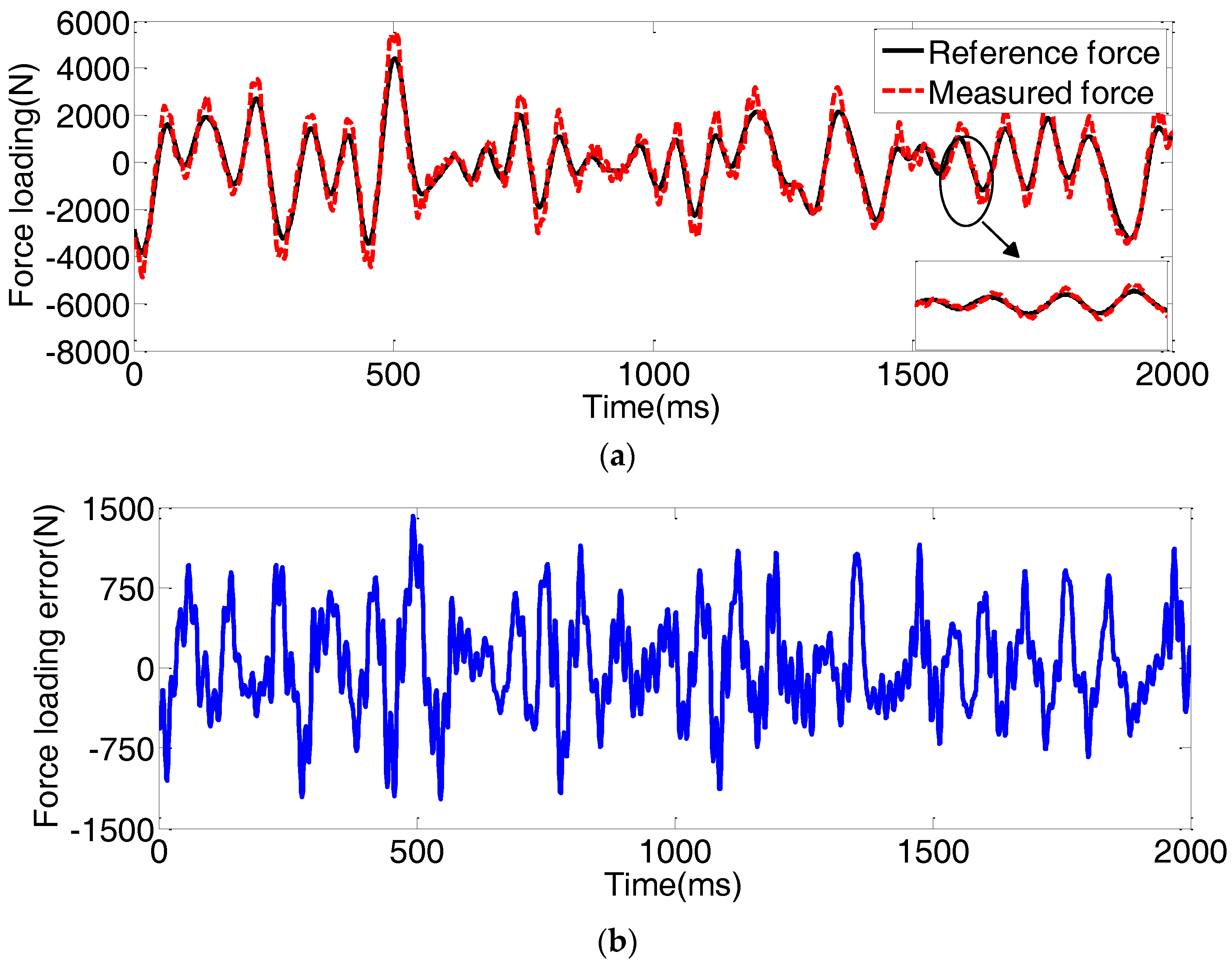
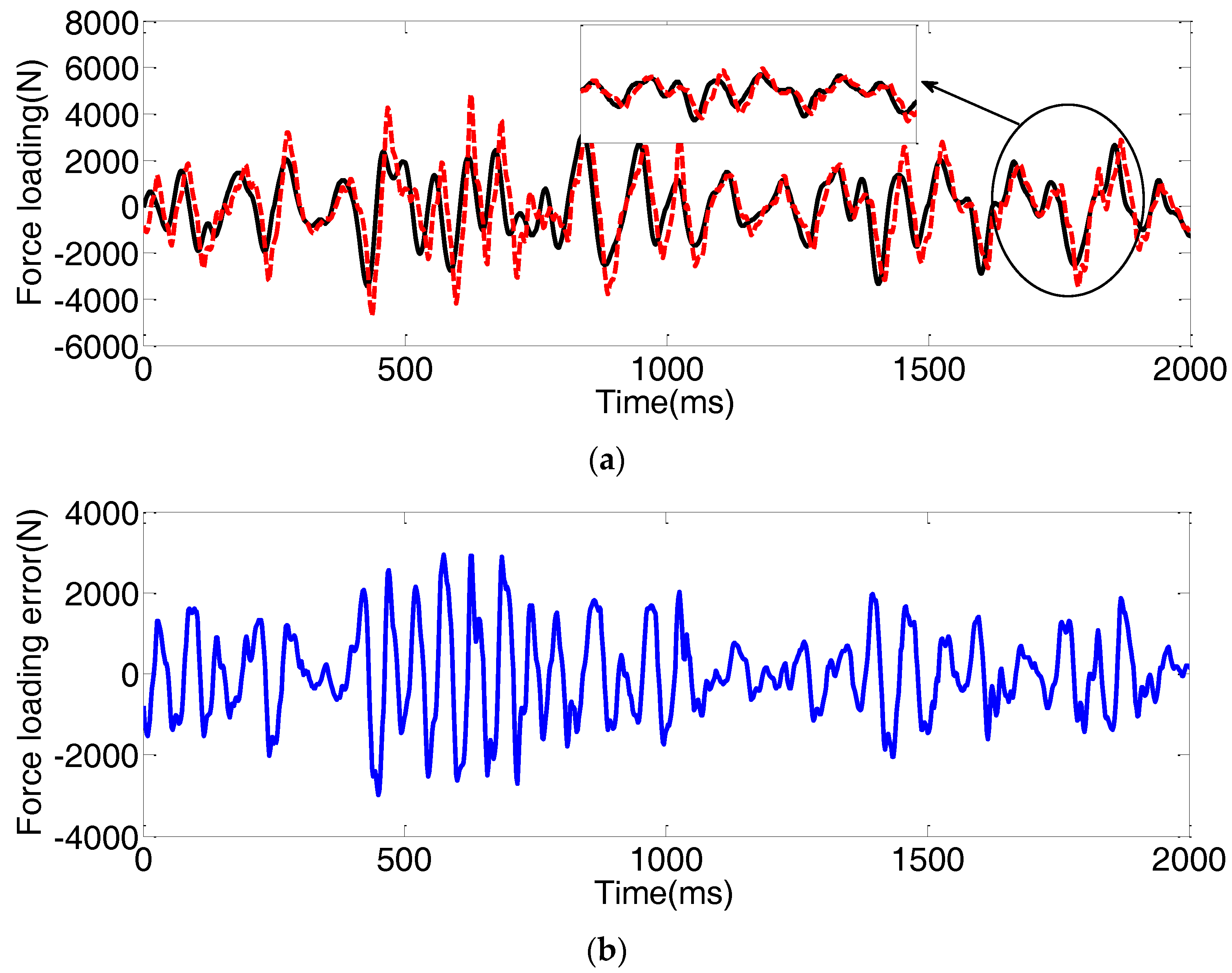
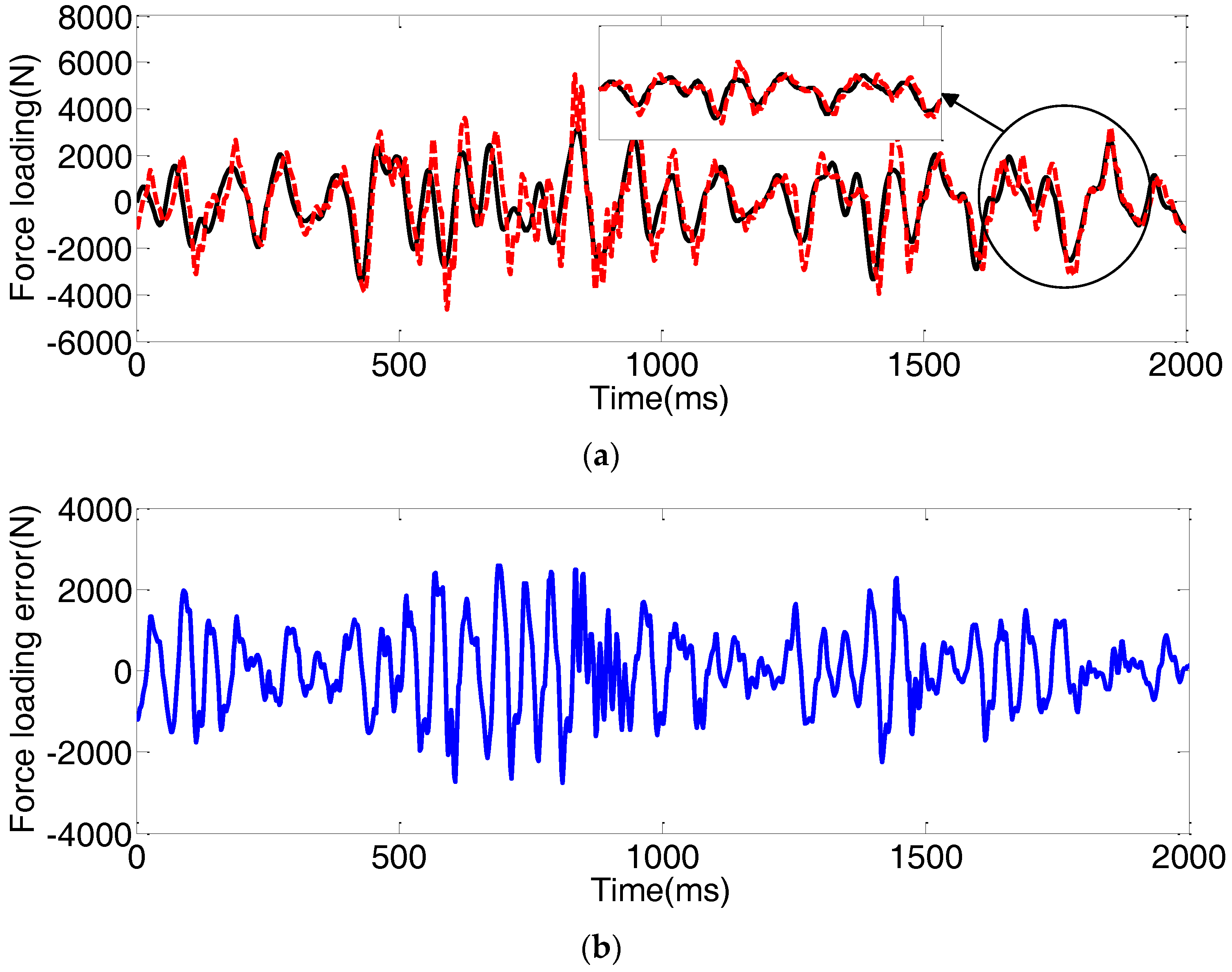
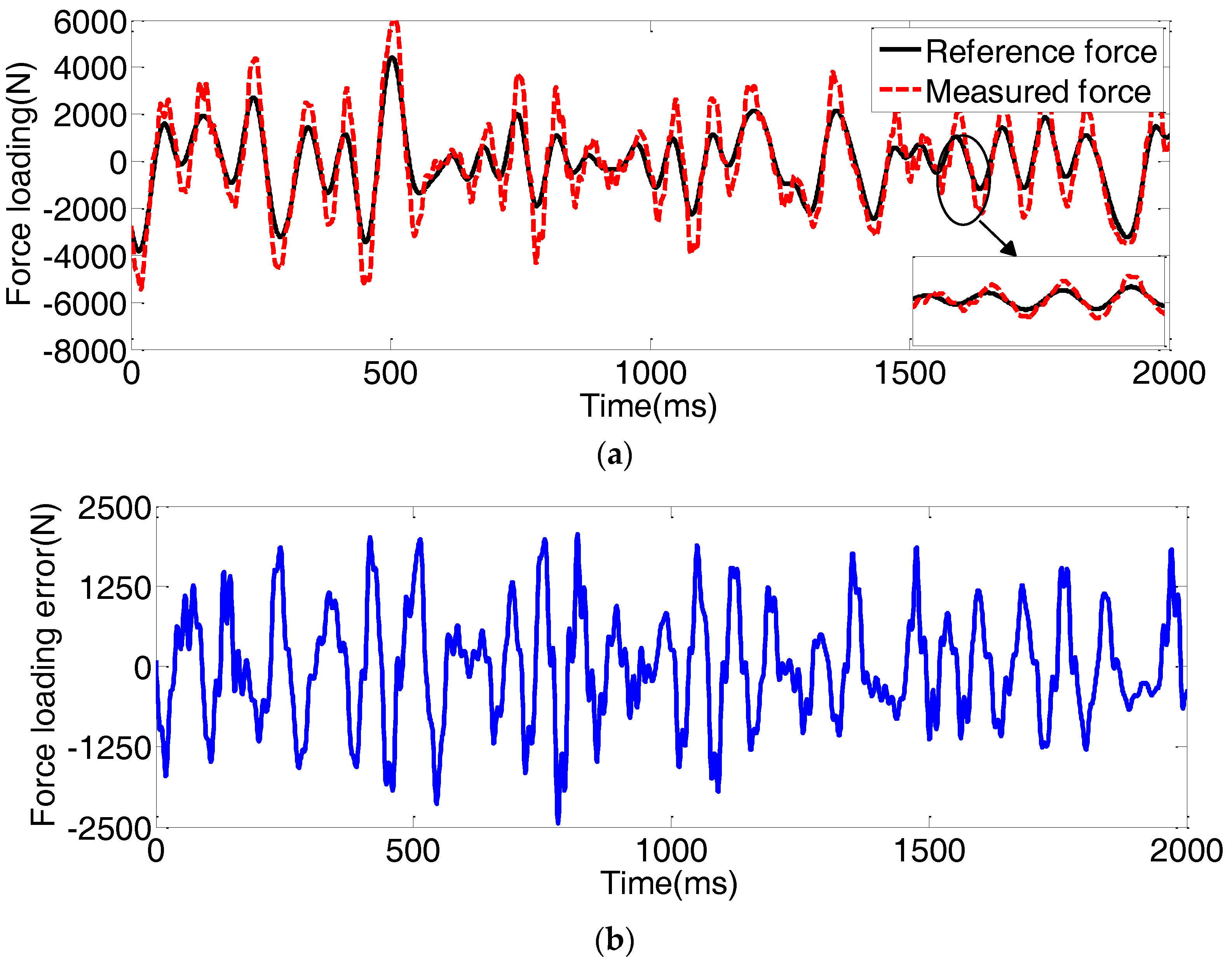
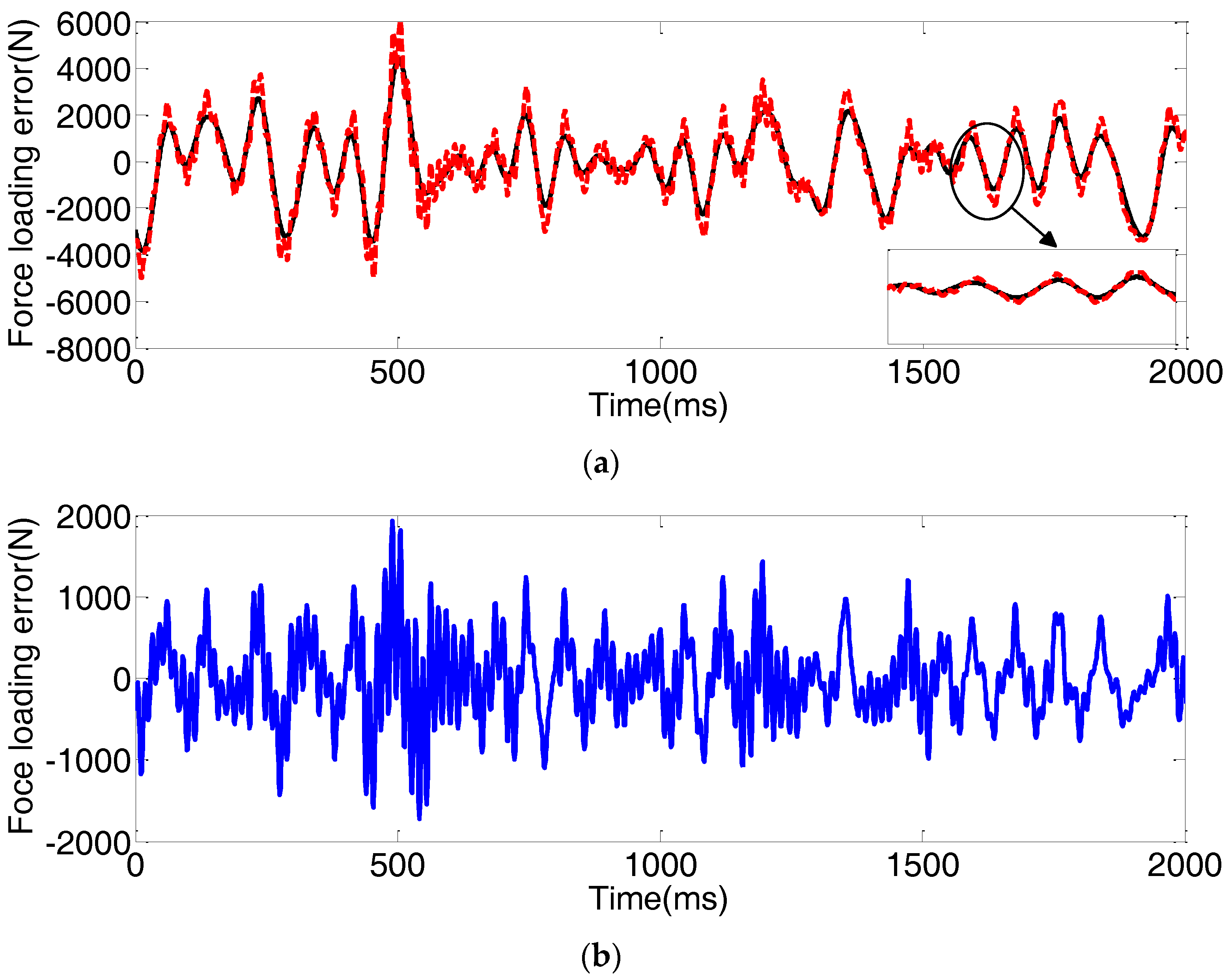
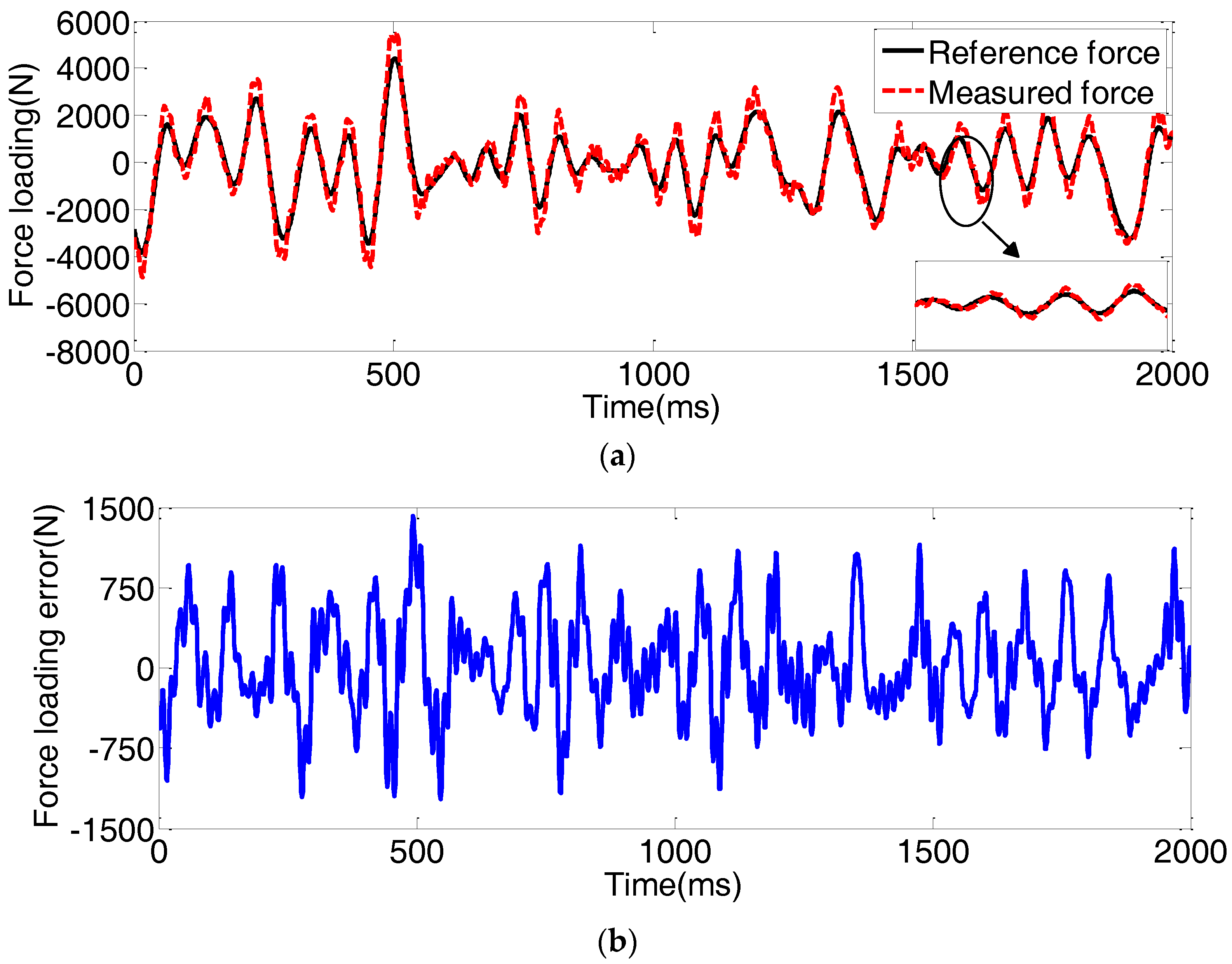
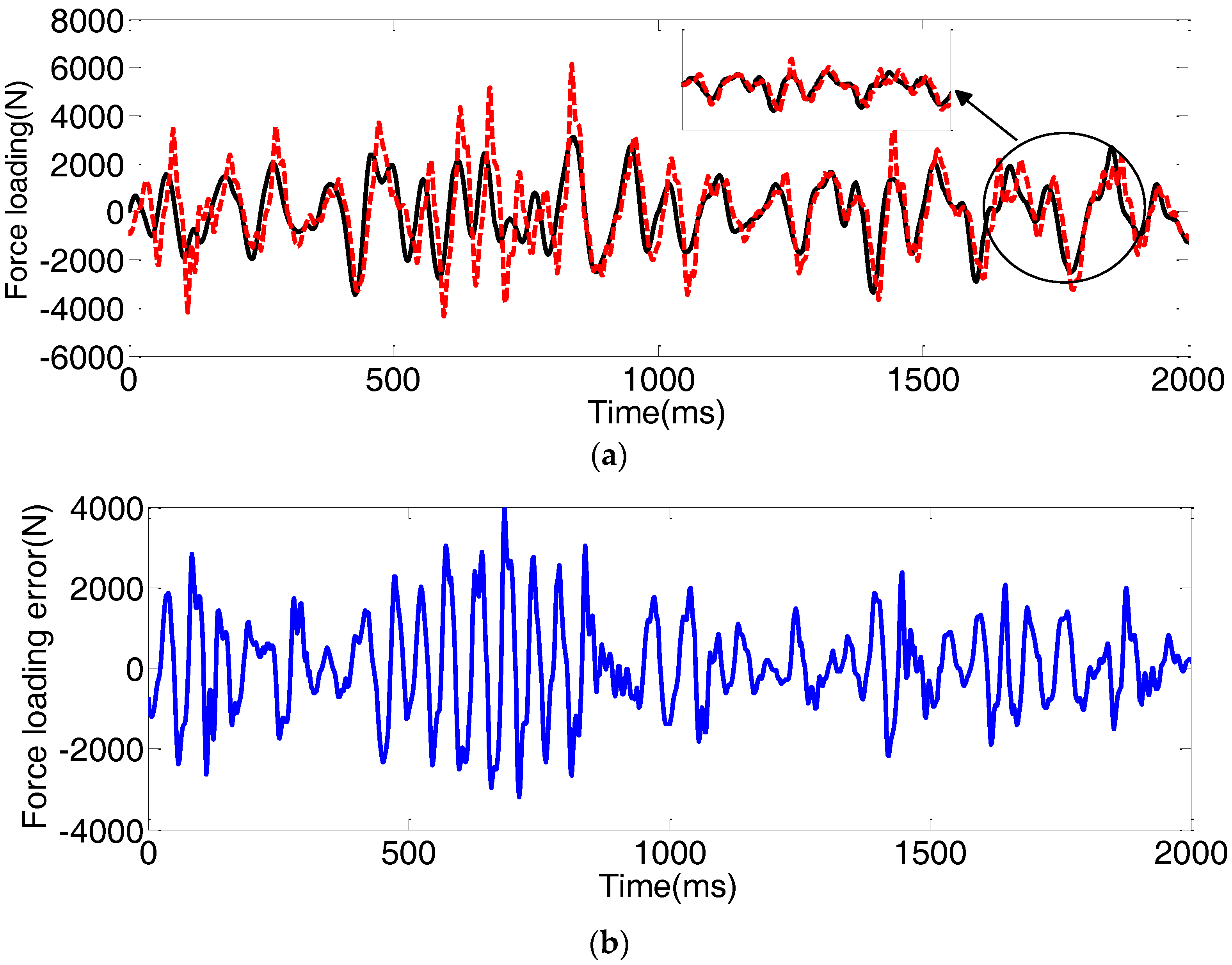
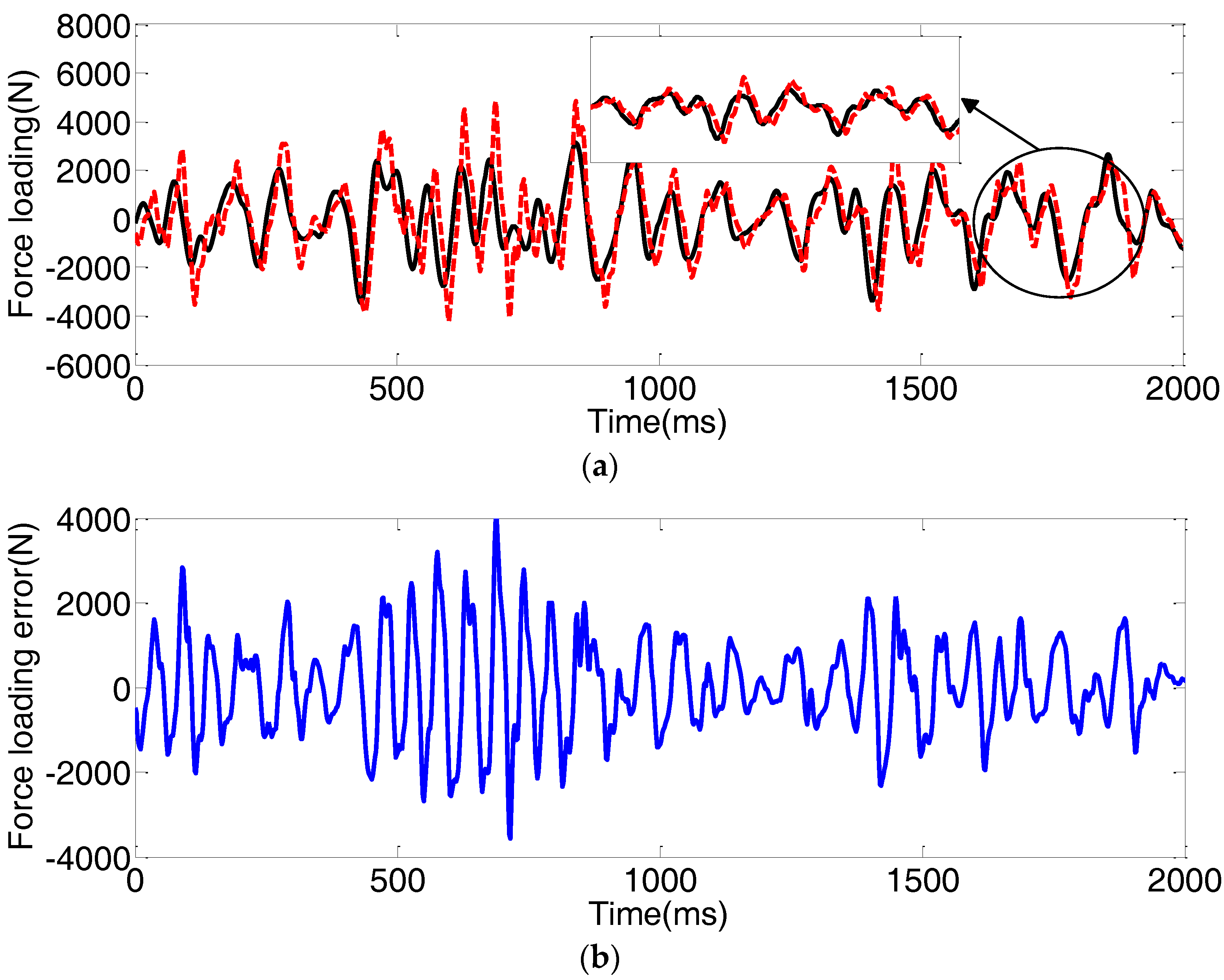
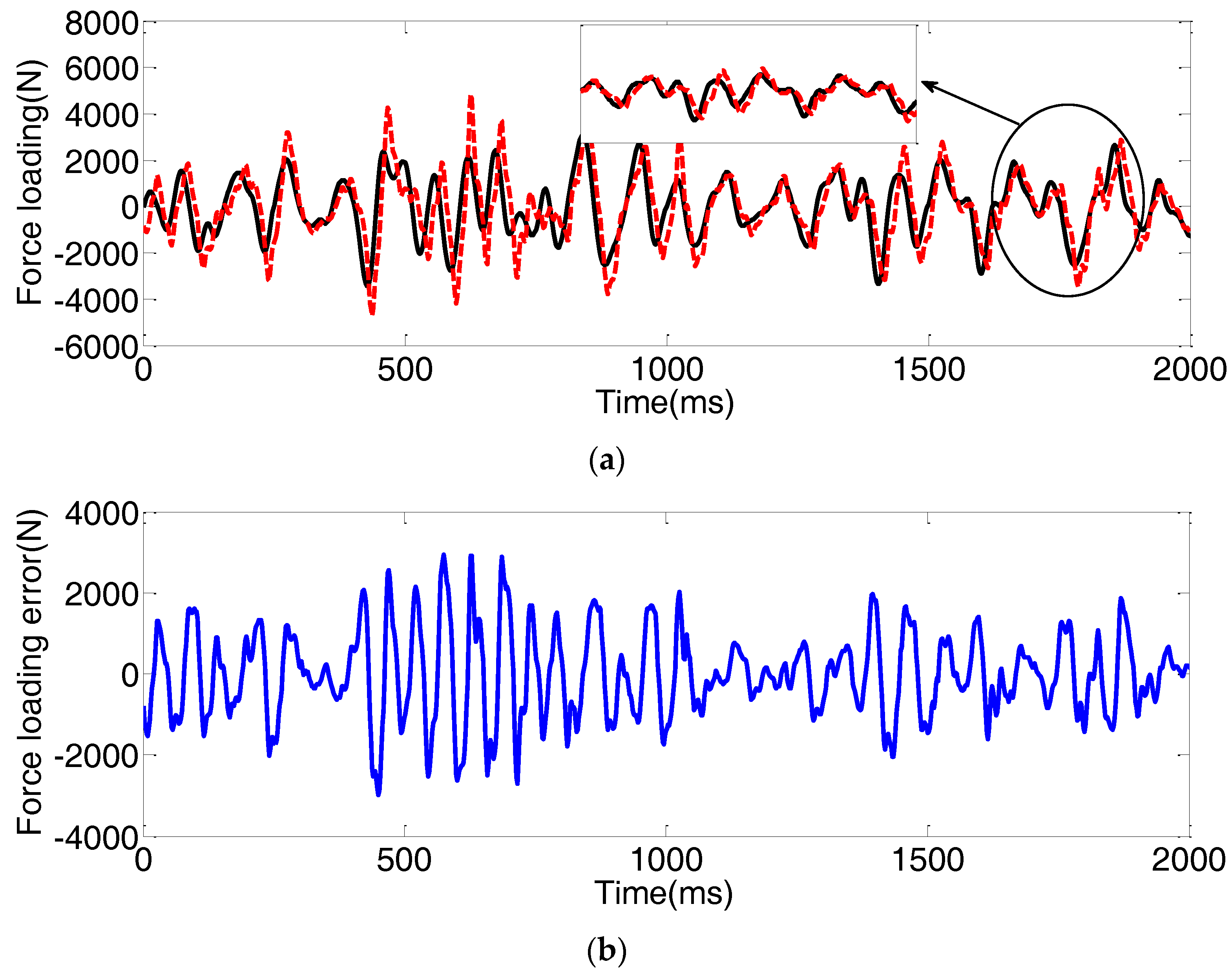
4. Experimental Results and Analysis
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Guan, C.; Pan, S.X. Nonlinear adaptive robust control of single-rod electro-hydraulic actuator with unknown nonlinear parameters. IEEE Trans. Control. Syst. Technol. 2008, 16, 434–445. [Google Scholar] [CrossRef]
- Shao, X.; Enyart, G. Development of a versatile hybrid testing system for seismic experimentation. Exp. Tech. 2014, 38, 44–60. [Google Scholar] [CrossRef]
- Shen, G.; Zhu, Z.C.; Zhang, L.; Tang, Y.; Yang, C.; Zhao, J.; Liu, G.; Han, J. Adaptive feed-forward compensation for hybrid control with acceleration time waveform replication on electro-hydraulic shaking table. Control Eng. Pract. 2013, 21, 1128–1142. [Google Scholar]
- Nakata, N. Effective force testing using a robust loop shaping controller. Earthq. Eng. Struct. D 2013, 42, 261–275. [Google Scholar] [CrossRef]
- Plummer, A.R. Robust electrohydraulic force control. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2007, 221, 717–731. [Google Scholar] [CrossRef]
- Aknouche, H.; Bechtoula, H.; Airouche, A. Investigation on the performance of the six DOF CGS, Algeria, shaking table. Earthq. Struct. 2014, 6, 539–560. [Google Scholar] [CrossRef]
- Han, J.W.; Kim, J.D.; Song, S.Y. Fatigue strength evaluation of a bogie frame for urban maglev train with fatigue test on full-scale test rig. Eng. Fail. Anal. 2013, 31, 412–420. [Google Scholar] [CrossRef]
- Tang, Y.; Zhu, Z.C.; Shen, G. Design and experimental evaluation of feedforward controller integrating filtered-x LMS algorithm with applications to electro-hydraulic force control systems. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 230, 1951–1967. [Google Scholar] [CrossRef]
- Alleyne, A.; Rui, L.; Wright, H. On the limitations of force tracking control for hydraulic active suspensions. In Proceedings of the American Control Conference, Philadelphia, PA, USA, 21–26 June 1998; pp. 43–47. [Google Scholar]
- Truong, D.Q.; Ahn, K.K. Force control for hydraulic load simulator using self-tuning grey predictor—Fuzzy PID. Mechatronics 2009, 19, 233–246. [Google Scholar] [CrossRef]
- Kim, J.W.; Xuan, D.J.; Kim, Y.B. Design of a forced control system for a dynamic road simulator using QFT. Int. J. Automot. Technol. 2008, 9, 37–43. [Google Scholar] [CrossRef]
- Zhao, J.S.; Shen, G.; Yang, C.F.; Liu, G.; Yin, L.; Han, J. Feel force control incorporating velocity feedforward and inverse model observer for control loading system of flight simulator. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2013, 227, 161–175. [Google Scholar] [CrossRef]
- Zhao, J.S.; Shen, G.; Zhu, W.D.; Yang, C.; Agrawal, S.K. Force tracking control of an electro-hydraulic control loading system on a flight simulator using inverse model control and a damping compensator. Trans. Inst. Meas. Control 2016, 40, 135–147. [Google Scholar] [CrossRef]
- Shen, G.; Zhu, Z.C.; Li, X. Real-time electro-hydraulic hybrid system for structural testing subjected to vibration and force loading. Mechatronics 2015, 33, 49–70. [Google Scholar] [CrossRef]
- Shen, G.; Zhu, Z.C.; Zhao, J.S. Real-time tracking control of electro-hydraulic force servo systems using offline feedback control and adaptive control. ISA Tran. 2016, 11, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Li, H.Y.; Hu, Y.A. Robust sliding-mode backstepping design for synchronization control of cross-strict feedback hyperchaotic systems with unmatched uncertainties. Commun. Nonlinear Sci. 2011, 16, 3904–3913. [Google Scholar] [CrossRef]
- Prut, N.; Suwat, K. Observer-based backstepping force control of an electro hydraulic actuator. Control Eng. Pract. 2009, 17, 895–902. [Google Scholar]
- Yao, J.Y.; Yang, G.H.; Jiao, Z.X. High dynamic feedback linearization control of hydraulic actuators with backstepping. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 229, 728–737. [Google Scholar] [CrossRef]
- Park, J.H. Synchronization of Genesio chaotic system via backstepping approach. Chaos Solitons Fractals 2006, 27, 1369–1375. [Google Scholar] [CrossRef]
- Yao, J.Y.; Jiao, Z.X.; Ma, D. Extended-State-Observer-Based Output Feedback Nonlinear Robust Control of Hydraulic Systems with Backstepping. IEEE Trans. Ind. Electron. 2014, 61, 6285–6293. [Google Scholar] [CrossRef]
- Chen, Z.; Yao, B.; Wang, Q. μ-synthesis based adaptive robust control of linear motor driven stages with high-frequency dynamics: A case study with comparative experiments. IEEE-ASME Trans. Mechatron. 2015, 20, 1482–1490. [Google Scholar] [CrossRef]
- Sun, W.C.; Gao, H.J.; Okyay, K. Vibration Isolation for Active Suspensions with Performance Constraints and Actuator Saturation. IEEE-ASME Trans. Mechatron. 2015, 20, 675–683. [Google Scholar] [CrossRef]
- Wang, C.W.; Jiao, Z.X.; Wu, S.; Shang, Y. Nonlinear adaptive torque control of electro-hydraulic load system with external active motion disturbance. Mechatronics 2014, 24, 32–40. [Google Scholar] [CrossRef]
- Yao, J.Y.; Jiao, Z.X.; Yao, B. Nonlinear adaptive robust backstepping force control of hydraulic load simulator: Theory and experiments. J. Mech. Sci. Technol. 2014, 28, 1499–1507. [Google Scholar] [CrossRef]
- Chen, S.; Yao, B.; Zhu, X.C.; Chen, Z.; Wang, Q.; Zhu, S.; Song, Y. Adaptive Robust Backstepping Force Control of 1-DOF Joint Exoskeleton for Human Performance Augmentation. IFAC-PapersOnLine 2016, 48, 142–147. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, Z.; Du, Y.J. Robust adaptive backstepping control for reentry reusable launch vehicles. Acta Astronaut. 2016, 126, 258–264. [Google Scholar] [CrossRef]
- Yao, J.Y.; Jiao, Z.X.; Ma, D.W.; Yan, L. High-accuracy tracking control of hydraulic rotary actuators with modelling uncertainties. IEEE-ASME Trans. Mechatron. 2014, 19, 633–641. [Google Scholar] [CrossRef]
- Yao, J.Y.; Jiao, Z.X.; Ma, D.W. High dynamic adaptive robust control of load emulator with output feedback signal. J. Frankl. Inst. 2014, 351, 4415–4433. [Google Scholar] [CrossRef]
- Kadda, Z.M.; Tahar, M.; Benhadria, M.R.; Bestaoui, Y. Fuzzy integral sliding mode based on backstepping control synthesis for an autonomous helicopter. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2012, 227, 751–765. [Google Scholar]
- Wei, J.H.; Zhang, Q.; Li, M.J.; Shi, W. High-performance motion control of the hydraulic press based on an extended fuzzy disturbance observer. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2016, 230, 1044–1061. [Google Scholar] [CrossRef]
- Wang, C.; Gao, Q.; Hou, Y.L.; Hou, R.; Min, H. Adaptive complementary fuzzy self-recurrent wavelet neural network controller for the electric load simulator system. Adv. Mech. Eng. 2016, 8, 1–12. [Google Scholar]
- Zhang, X.M.; Liu, X.K.; Li, Y. Adaptive fuzzy tracking control for nonlinear strict-feedback systems with unmodeled dynamics via backstepping technique. Neurocomputing 2017, 235, 182–191. [Google Scholar] [CrossRef]
- Rong, H.J.; Yang, Z.X.; Wong, P.K.; Vong, C.M.; Zhao, G.S. A novel meta-cognitive fuzzy-neural model with backstepping strategy for adaptive control of uncertain nonlinear systems. Neurocomputing 2017, 230, 332–344. [Google Scholar] [CrossRef]
- Mercorelli, P.; Werner, N. An Adaptive Resonance Regulator for an Actuator using Periodic Signals in Camless Engine Systems. IFAC-PapersOnLine 2016, 49, 176–181. [Google Scholar] [CrossRef]
- Mercorelli, P.; Werner, N. An Adaptive Resonance Regulator Design for Motion Control of Intake Valves in Camless Engine Systems. IEEE Trans. Ind. Electron. 2017, 64, 3413–3422. [Google Scholar] [CrossRef]
- Magdi, S. Mahmoud, Fuzzy Control, Estimation and Diagnosis; Springer International Publishing: Berlin, Germany, 2018. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Parameters | Values | Units |
|---|---|---|---|
| Oil effective bulk modulus | |||
| Total chamber volume | |||
| Cylinder effective area | |||
| Total mass | 530 | kg | |
| Viscous damping coefficient | 7000 | ||
| Stiffness of force sensor | |||
| Saturated input of servo-valve | 10 | V | |
| Rated flow of servo-valve | 38 | L/min | |
| Total leakage coefficient | |||
| System supply pressure | 9 | Mpa |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 0.0007 | 300 | ||
| 0.002 | 200 | ||
| 0 | |||
| 0.0035 | |||
| 0.01 | |||
| 50 | |||
| 500 | 150 |
| Control Algorithm | Peak Error (N) | RMSE |
|---|---|---|
| PID + VF | 2435.7 | 858.675 |
| Backstepping controller | 2215.9 | 654.325 |
| ABC | 1995.6 | 603.215 |
| NAFBC | 1405.2 | 445.389 |
| Control Algorithm | Peak Error (N) | RMSE |
|---|---|---|
| PID + VF | 3952.3 | 1160.837 |
| Backstepping controller | 3743.8 | 1070.723 |
| ABC | 2914.6 | 957.904 |
| NAFBC | 2610.5 | 909.292 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Zhu, Z.-C.; Rui, G.-C.; Cheng, D.; Shen, G.; Tang, Y. Force Loading Tracking Control of an Electro-Hydraulic Actuator Based on a Nonlinear Adaptive Fuzzy Backstepping Control Scheme. Symmetry 2018, 10, 155. https://doi.org/10.3390/sym10050155
Li X, Zhu Z-C, Rui G-C, Cheng D, Shen G, Tang Y. Force Loading Tracking Control of an Electro-Hydraulic Actuator Based on a Nonlinear Adaptive Fuzzy Backstepping Control Scheme. Symmetry. 2018; 10(5):155. https://doi.org/10.3390/sym10050155
Chicago/Turabian StyleLi, Xiang, Zhen-Cai Zhu, Guang-Chao Rui, Dong Cheng, Gang Shen, and Yu Tang. 2018. "Force Loading Tracking Control of an Electro-Hydraulic Actuator Based on a Nonlinear Adaptive Fuzzy Backstepping Control Scheme" Symmetry 10, no. 5: 155. https://doi.org/10.3390/sym10050155
APA StyleLi, X., Zhu, Z.-C., Rui, G.-C., Cheng, D., Shen, G., & Tang, Y. (2018). Force Loading Tracking Control of an Electro-Hydraulic Actuator Based on a Nonlinear Adaptive Fuzzy Backstepping Control Scheme. Symmetry, 10(5), 155. https://doi.org/10.3390/sym10050155