Interactive Tuning Tool of Proportional-Integral Controllers for First Order Plus Time Delay Processes





Abstract
1. Introduction
1.1. Background
1.2. Formulation of the Problem of Interest for This Investigation
1.3. Literature Survey
1.4. Scope and Contribution of This Study
1.5. Organization of the Paper
2. Control Problem
2.1. The PI Stabilization Problem
2.2. PI Tuning Rules
- The “quarter decay ratio” criterion achieves a small settling time.
- The internal mode control (IMC) tuning rule of Rivera achieves an excellent set-point response; however, the load disturbance rejection is very slow. The Skogestad IMC tuning rule works well for both cases.
- The achievable performance specifications for unstable processes are usually worse than those obtained for stable systems. For the unstable case, PI controllers do not normally achieve very good responses with larger overshoot and settling times. Additionally, the robustness of the feedback system is very limited for small changes in the process parameters, which does not usually occur in stable systems.
2.3. Stabilizing Regions for a Particular PI Controller
2.4. Discrete Implementation and Practical Considerations
3. Developed Graphical User Interface
- Model parameter space (a). This plot shows the T–τ model parameter space. These two parameters can be jointly changed by dragging the blue point shown in the plot. The corresponding text fields located in the Model parameters panel (d) are automatically updated. In addition, the set of stable FOPTD plants is also plotted. This stability region is given for the PI controller specified in the tool (i.e., the KP and KI values), and for a specific K. If any of these parameters are changed, the aforementioned stability region is automatically updated.
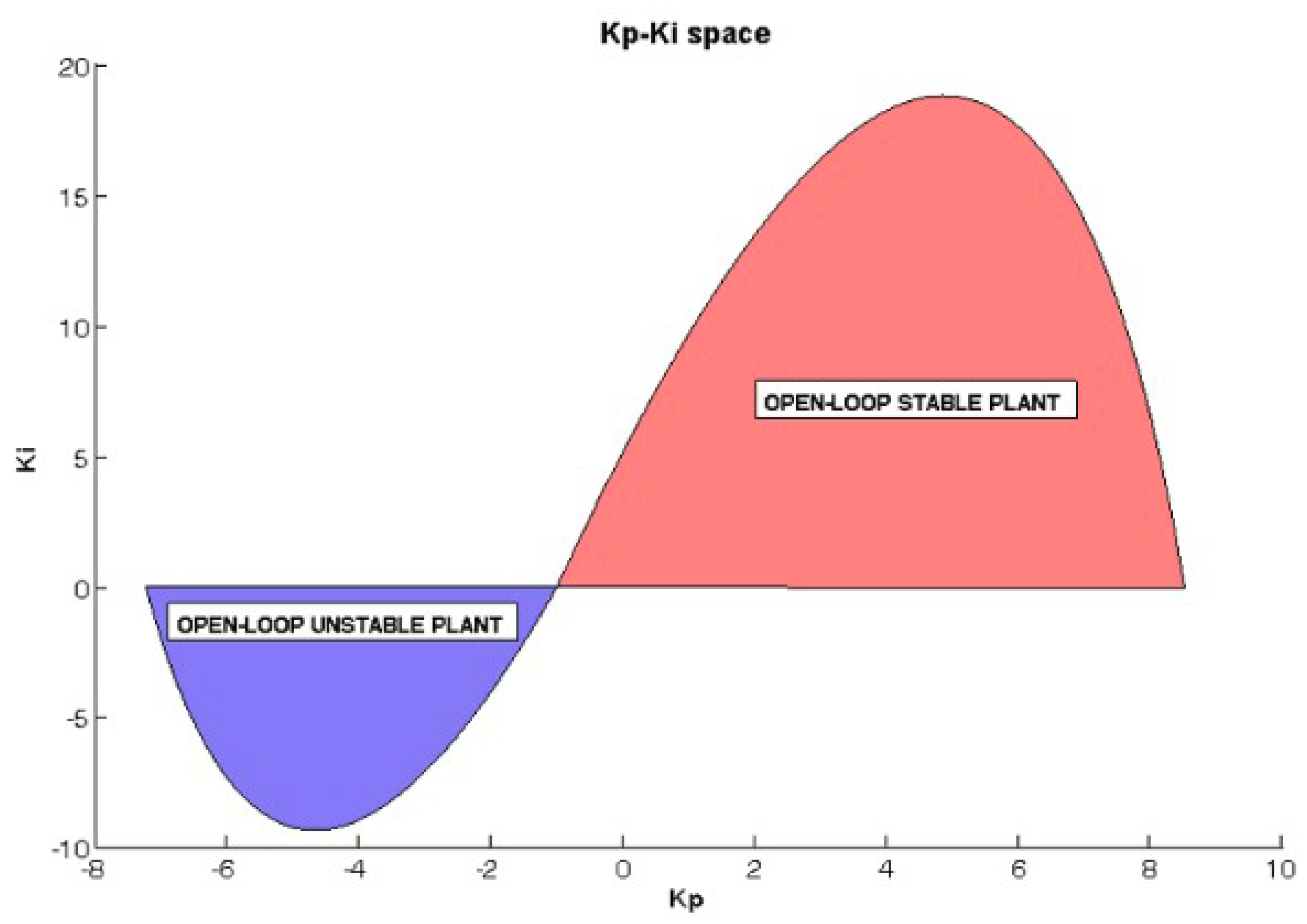
- KP–KI parameter space (b). This plot shows the KP–KI parameter space. The current KP and KI values are represented by a red point. These values are also shown in two text fields located on section f (see Figure 5). PI parameters can be modified either by editing these text fields or by dragging the aforesaid red point. In addition, the plot shows the set of PI controllers that stabilize the specified feedback system. If any of the model parameters are modified, the KP–KI region is automatically updated.
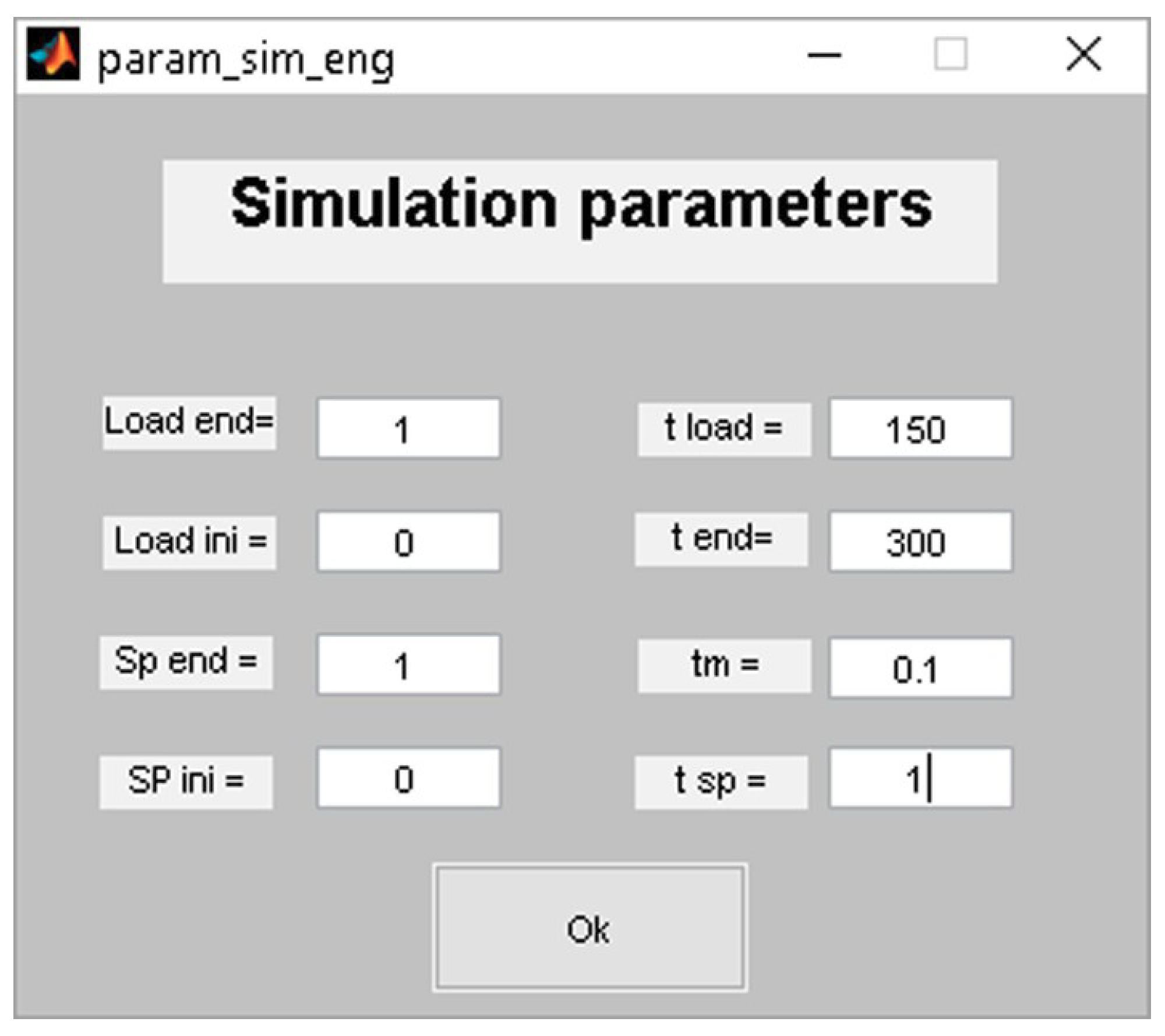
- Time response simulation (c). This plot shows the temporal response of the specified feedback system. It is possible to show different temporal responses, which is useful to contrast different tuning rules. The simulation parameters window (Figure 6) allows the user to configure step changes in both the reference signal and load disturbance. The initial and final values of these step changes, as well as the times when they occur, must be specified.
- Model parameters (d). As mentioned before, the model parameters (steady-state gain, time constant, and time delay) can be changed by editing the text fields contained in this panel. In addition, the tool can work with one or two models by clicking the radio-button Mismatch models. By default, only the “nominal” model is used. However, when the second one, the “simulation” model, is enable, the two models are used and provide the corresponding stability regions, the requested tuning rules are applied on the “nominal” model, and simulations and analysis are performed using the “simulation” model. Therefore, enabling the Mismatch models button, the user can modify these model parameters and analyze the robustness of the closed-loop system. This feature can be also used to consider process model uncertainties due to non-linearities of the plant. Although there are control methodologies directly accounting for the non-linear nature of the system [39,40], a classical approach is linearizing the original system around the nominal operation point, and assuming the non-linearities as parameter uncertainties of the approximated linear model when the point of operation changes.
- Tuning rules (e). The Tuning Rules menu, located on the upper part of the main window, contains the tuning rules described in Table A1 and Table A2. These tuning rules are organized in two sub-menus: open-loop stable models and open-loop unstable models. When a tuning rule is selected (and its validity range is fulfilled by the nominal model parameters), the tool automatically generates a point or a set of points in the KP–KI parameter space. Depending on the tuning rule, some extra information can be requested by means of a pop-up menu, such as gain margin, phase margin, or the closed-loop time constant. The generated points are tagged in the KP–KI parameter space with the name of the tuning rule and the design specification. All these points are also updated when model parameters are modified.
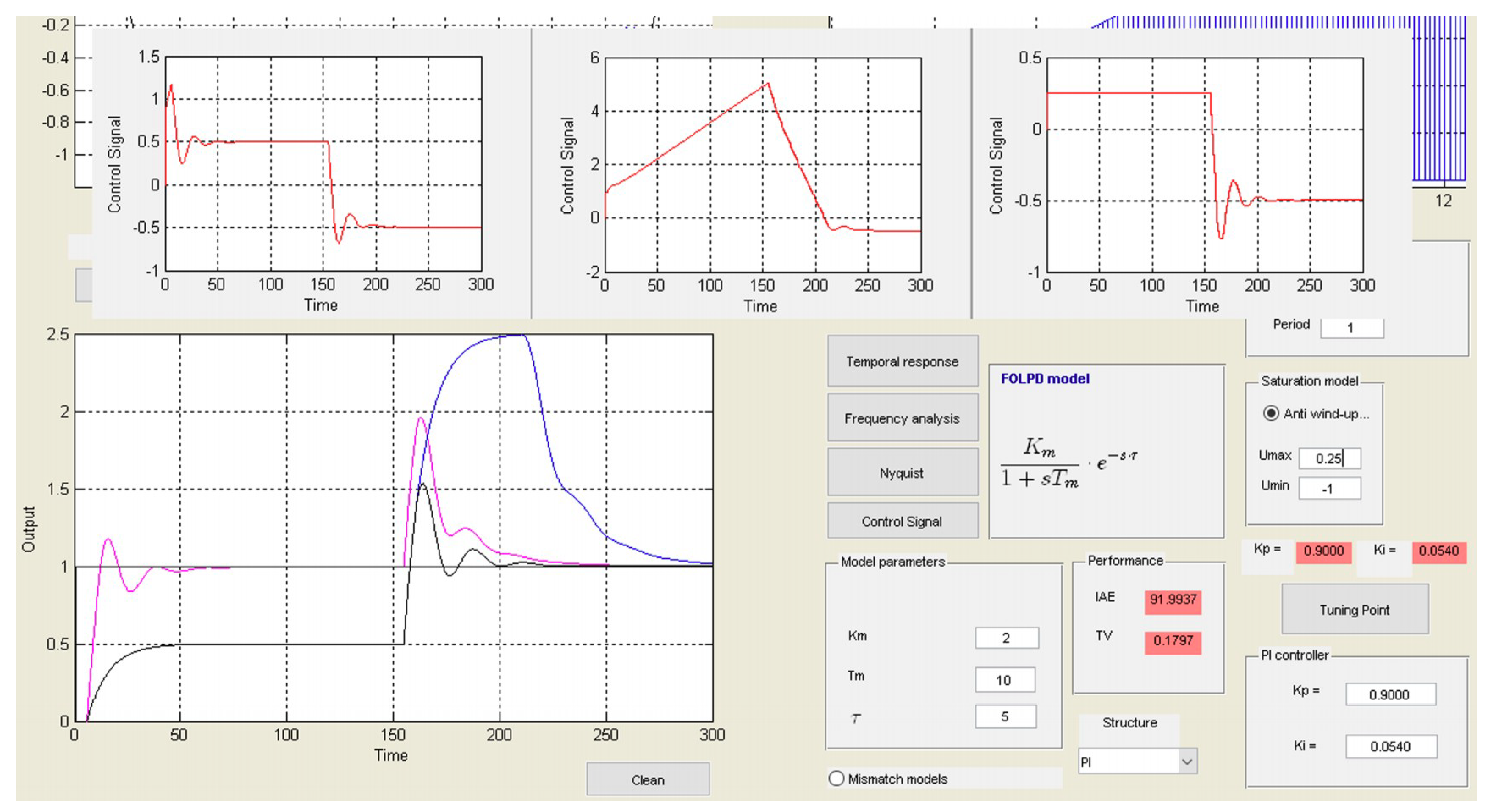
- PI controller configuration (f). A set of control panels related with the PI controller are included in this section. The Control Design panel allows selecting between the continuous and discrete domains. As mentioned before, in this tool, the PI design is performed in the continuous domain. Thus, once the design is carried out (i.e., the PI parameters and the model parameters are defined), the performance and degradation of the time response can be analyzed by clicking on the discrete radio-button. A new simulation will then be executed according to the sampling period defined in the Period text field. In addition, when the user switches from the continuous to the discrete domain, the plot that displayed the KP–KI parameter space region will display the closed-loop discrete pole localizations within the Z-plane. The saturation model can be specified in the Saturation model panel, where an anti-windup strategy can be enabled, and the minimum and maximum process input values can be specified. The saturation model is only applied when the discrete domain is selected. The tool can work with two types of PI structures: PI and I-P. In the I-P structure, only the measured output is introduced in the proportional term, and not the error, as in the PI structure. The KP and KI values are always visible in the text fields of the PI controller panel. As mentioned in point 2), they are also represented by the red point in the KP–KI parameter space. The Tuning point push button updates the control parameters with the KP and KI values shown in the text fields of pink color. These text fields show the obtained values by the last tuning rule selected by the user. In all cases, the temporal and frequency responses are updated. Finally, each time a simulation is carried out, the text fields contained in the Performance panel are updated. These field texts contain the integral of absolute error (IAE) and the total variation (TV). The first measure is useful to evaluate the output control performance, and the second to evaluate the “smoothness” of the control signal.
- Secondary windows (g). The control signal, the Nyquist plot, and the frequency response features (gain margin, phase margin, and sensitivity and complementary sensitivity peaks) are only displayed when the user demands them by means of the respective push buttons placed on the center of the main window. After changing the model or controller parameters, these windows are quickly updated. These windows are shown in Figure 7.
3.1. Comparison with Similar Software and Main Novelties of the Proposed Tool
- Modification of the process model and the controller parameters.
- Simulation parameters configuration.
- Representation of the closed-loop temporal response (control signal and controlled variable).
- Representation of the system frequency response (Nyquist diagram).
- Performance indices computation (IAE, TV).
- Interactive zooming/panning.
- The tool gathers several rules of tuning of PI controllers for FOPTD systems to allow their comparative analysis. Although some applications, such as MATLAB PID Tuner tool, allows adjustment with tuning rules, it only has 4 implemented. The present tool contains 17 rules with the future possibility to increase that number or add custom-user tuning rules.
- KP–KI controller parameter space and stability region. This special feature allows the user to choose the controller parameters interactively. Along with it we can also show the curves of different specifications, facilitating the previous task. Furthermore, several tuning rules can be compared by means of their associated points, which can be displayed in the mentioned region.
- Stability region in the parameter space of the T–τ model. For a gain process K and a given PI controller, this region shows the set of T–τ combinations that the controller is able to stabilize. Thus, the two aforementioned stability regions are very useful to study the robustness of the system.
- In addition to the continuous time domain analysis, the tool allows checking the performance of the closed-loop system in the discrete domain, taking into consideration real aspects in the controller implementation, such as the selection of sampling period, definition of the control signal limits, or the activation of an anti-windup method.
3.2. Training or Educational Uses
- Trial-and-error tuning, by means of the stabilizing region. The stabilizing region in the KP–KI parameter space is provided by the tool. By moving the red point within this space, the system stability and closed-loop response can be studied as a function of the control parameters.
- Comparison of PI tuning rules. The user can easily compare the performance achieved with different tuning rules and different specifications.
- Testing PI control limitations. For instance, in the case of an unstable FOPTD model, the user can check that it is not possible to achieve large gain and phase margins by moving the red point inside the corresponding stabilizing region (KP–KI parameter space). Similarly, the user can observe the set of FOPTD processes that can be stabilized given a particular PI controller.
- Analysis of PI controllers designed by pole cancellation. There are tuning rules that cancel the model pole with the controller zero doing TI = T. By specifying a line 1/TI in the KP–KI parameter space and moving the red point along it, PI controllers designed by pole cancellation can be studied; where TI remains constant, and only KP is changing.
- Robust analysis of the closed-loop system. As mentioned before, the tool can work simultaneously with the nominal and simulation models. Thus, when the Mismatch models radio-button is enabled, the user can analyze perturbations in the model parameter space and study the stabilizing regions or the frequency and temporal responses of the closed-loop system.
- Effects of practical considerations. As mentioned before, real considerations of PI controllers have been taken into account. In addition of the effects of a poor choice of the controller parameters, the degradation of the system closed-loop response when the sample time is not properly selected can be studied.
4. Illustrative Example
4.1. Practical Laboratory Process
5. Assessment and Evaluation
5.1. Student Survey
- Theoretical ideas: The tool is mainly focused on the design of PI controllers for stable and unstable FOPTD systems and the application of different tuning rules. However, it has been developed to facilitate the learning other basic concepts related to process control, such as stability boundary, robustness, temporal response for reference tracking, disturbance rejection, frequency response (Nyquist plot), and different closed-loop performance indices.
- User-friendly interface: The graphical user interface (GUI) has been designed avoiding unnecessary elements. In addition, an introduction to the tool is given to the students based on the workflow shown in Figure 4.
- Real-life problem: The discrete implementation of PI controllers can be evaluated in the tool considering real aspects, such as the windup effect of process input constraints. This step can be carried out after a proper tuning is performed (see Figure 4), allowing one to study the possible performance degradations in the closed-loop system response.
- Visual sensation: The GUI is structured coherently and is user-friendly, trying to keep the interface simple, and ensuring that the possible actions that can be carried out are easy to understand.
- Introduction of PID/PI tuning rules, their classification, explanation of the most extended rules, and advantages and disadvantages.
- Description of the tool based on the workflow shown in Figure 4.
- Running the tool which is available to students, and resolution and discussion of several examples interactively.
- Brief introduction to the discrete implementation of controllers and practical aspects, such as sample time selection and input saturations and wind up effect. The fundamentals of these concepts are explained in detail in advanced control subjects. In this lesson, these problems are exemplified using the tool.
- Description of the process to be controlled and its operation.
- Obtaining a model of the system by identification and approximation to a FOPTD model.
- Design and simulation of different PI controllers using the proposed tool.
- Verification of the previous designs in the real process and comparison with simulation results.
- Learning value considers questions about the students’ perceptions of the effectiveness of the proposed tool in facilitating the learning of PI control theory.
- Value added evaluates the use of the tool as a complement for traditional lectures.
- Design usability and easy understanding of the tool is aimed to evaluate how the students perceive the clarity and ease to work with the GUI.
5.2. Student Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author Rule | KP | TI | Comment |
|---|---|---|---|
| Ziegler and Nichols (1942) | Quarter decay ratio, | ||
| AMIGO Aström and Hägglund (2005) | I-P structure when otherwise PI structure | ||
| MISE Murrill (1967) | Regulator tuning by minimum integral error | ||
| MIAE Murrill (1967) | |||
| MITAE Murrill (1967) | |||
| MIAE Rovira et al. (1969) | Servo tuning by minimum integral error | ||
| MITAE Rovira et al. (1969) | |||
| Cohen and Coon (1953) | Quarter decay ratio, | ||
| O’Dwyer (2001) | Am: Gain margin | ||
| Skogestad (2003) | Tc: Closed-loop time constant | ||
| IMC Rivera et al. (1986) | Tc: Closed-loop time constant |
| Author Rule | KP | TI | Comment |
|---|---|---|---|
| Mahji and Atherton (2000) | ISTE optimization criterion | ||
| De Paor and O’Malley (1989) | Gain margin Am = 2 | ||
| Venkatashankar and Chidambaram (1994) | |||
| Chidambaram (1995) | |||
| Chidambaram (1997) | |||
| Ho and Xu (1998) | Φm: Phase margin Am: Gain margin |
Appendix B
References
- Srivastava, S.; Pandit, V.S. A PI/PID controller for time delay systems with desired closed loop time response and guaranteed gain and phase margins. J. Process Control 2016, 37, 70–77. [Google Scholar] [CrossRef]
- Knospe, C. PID control. IEEE Control Syst. 2006, 26, 30–31. [Google Scholar] [CrossRef]
- Huba, M.; Vrančič, D. Comparing filtered PI, PID and PIDD 2 control for the FOTD plants. IFAC-PapersOnLine 2018, 51, 954–959. [Google Scholar] [CrossRef]
- Alcántara, S.; Vilanova, R.; Pedret, C. PID control in terms of robustness/performance and servo/regulator trade-offs: A unifying approach to balanced autotuning. J. Process Control 2013, 23, 527–542. [Google Scholar] [CrossRef]
- O’Dwyer, A. An Overview of Tuning Rules for the PI and PID Continuous-Time Control of Time-Delayed Single-Input, Single-Output (SISO) Processes. In PID Control in the Third Millenium; Springer: London, UK, 2012; pp. 3–44. [Google Scholar]
- O’Dwyer, A. Handbook of PI and PID Controller Tuning Rules, 2nd ed.; Imperial College Press: London, UK, 2006; ISBN 9781860949104. [Google Scholar]
- Leva, A.; Maggion, M. Model-Based PI(D) Autotuning. In PID Control in the Third Millenium; Springer: London, UK, 2012; pp. 45–73. [Google Scholar]
- Li, Y.; Ang, K.H.; Chong, G.C.Y. Patents, Software, and Hardware for PID Control: An Overview and Analysis of the Current Art. IEEE Control Syst. 2006, 26, 42–54. [Google Scholar] [CrossRef]
- Silva, G.J.; Datta, A.; Bhattacharyya, S.P. PID Controllers for Time-Delay Systems; Birkhäuser: Basel, Switzerland, 2005; ISBN 0817642668. [Google Scholar]
- Ziegler, J.G.; Nichols, N.B. Optimum settings for automatic controllers. Trans. ASME 1942, 64, 759–768. [Google Scholar] [CrossRef]
- Arrieta, O.; Vilanova, R. Simple PID tuning rules with guaranteed Ms robustness achievement. IFAC Proc. Vol. 2011, 44, 12042–12047. [Google Scholar] [CrossRef]
- Murill, P.W. Automatic Control of Processes; International Textbook, Co.: Scranton, PA, USA, 1967. [Google Scholar]
- Rovira, A.A.; Murrill, P.W.; Smith, C.L. Tuning controllers for setpoint changes. Instrum. Control Syst. 1969, 42, 67–69. [Google Scholar]
- Awouda, A.E.A.; Bin Mamat, R. Refine PID tuning rule using ITAE criteria. In Proceedings of the 2nd International Conference on Computer and Automation Engineering (ICCAE), Singapore, 26–28 February 2010; Volume 5, pp. 171–176. [Google Scholar]
- Hägglund, T.; Åström, K.J. Revisiting the Ziegler-Nichols tuning rules for PI control. Asian J. Control 2002, 2, 364–380. [Google Scholar] [CrossRef]
- Åström, K.J.; Hägglund, T. Revisiting the Ziegler–Nichols step response method for PID control. J. Process Control 2004, 14, 635–650. [Google Scholar] [CrossRef]
- Ho, M.-T.; Datta, A.; Bhattacharyya, S.P. Robust and non-fragile PID controller design. Int. J. Robust Nonlinear Control 2001, 11, 681–708. [Google Scholar] [CrossRef]
- Alfaro, V.M.; Vilanova, R. Optimal robust tuning for 1DoF PI/PID control unifying FOPDT/SOPDT models. In Proceedings of the 2nd IFAC Conference on Advance in PID control (PID’12), Brescia, Italy, 28–30 March 2012; Volume 2, pp. 572–577. [Google Scholar]
- Cho, W.; Lee, J.; Edgar, T.F. Simple analytic proportional-integral-derivative (PID) controller tuning rules for unstable processes. Ind. Eng. Chem. Res. 2013, 53, 5048–5054. [Google Scholar] [CrossRef]
- Rajinikanth, V.; Latha, K. Tuning and retuning of PID controller for unstable systems using evolutionary algorithm. ISRN Chem. Eng. 2012. [Google Scholar] [CrossRef]
- Rajinikanth, V.; Latha, K. Setpoint weighted PID controller tuning for unstable system using heuristic algorithm. Arch. Control Sci. 2012, 22, 481–505. [Google Scholar] [CrossRef]
- Korsane, D.T.; Yadav, V.; Raut, K.H. PID tuning rules for first order plus time delay system. Int. J. Innov. Res. Electr. Instrum. Control Eng. 2014, 2, 582–586. [Google Scholar]
- Vilanova, R.; Alfaro, V.M.; Arrieta, O. Robustness in PID Control. In PID Control in the Third Millenium; Springer: London, UK, 2012; pp. 113–146. [Google Scholar]
- Guzman, J.L.; Costa-Castello, R.; Dormido, S.; Berenguel, M. An Interactivity-Based Methodology to Support Control Education: How to Teach and Learn Using Simple Interactive Tools [Lecture Notes]. IEEE Control Syst. 2016, 36, 63–76. [Google Scholar] [CrossRef]
- Martínez, J.; Padilla, A.; Rodríguez, E.; Jiménez, A.; Orozco, H. Diseño de Herramientas Didácticas Enfocadas al Aprendizaje de Sistemas de Control Utilizando Instrumentación Virtual. Rev. Iberoam. Automática e Informática Ind. RIAI 2017, 14, 424–433. [Google Scholar] [CrossRef]
- Ruiz, Á.; Jiménez, J.E.; Sánchez, J.; Dormido, S. Design of event-based PI-P controllers using interactive tools. Control Eng. Pract. 2014, 32, 183–202. [Google Scholar] [CrossRef]
- Morales, D.C.; Jiménez-Hornero, J.E.; Vázquez, F.; Morilla, F. Educational tool for optimal controller tuning using evolutionary strategies. IEEE Trans. Educ. 2012, 55, 48–57. [Google Scholar] [CrossRef]
- Guzmán, J.L.; Aström, K.J.; Dormido, S.; Hägglund, T.; Berenguel, M.; Piguet, Y. Interactive learning modules for PID control. IEEE Control Syst. Mag. 2008, 28, 118–134. [Google Scholar] [CrossRef]
- Guzmán, J.L.; Dormido, S.; Berenguel, M. Interactivity in education: An experience in the automatic control field. Comput. Appl. Eng. Educ. 2013, 21, 360–371. [Google Scholar] [CrossRef]
- Aliane, N. A matlab/simulink-based interactive module for servo systems learning. IEEE Trans. Educ. 2010, 53, 265–271. [Google Scholar] [CrossRef]
- Mathworks Home Page. Available online: http://www.mathworks.com (accessed on 2 August 2016).
- Ruz, M.L.; Morilla, F.; Vázquez, F. Teaching control with first order time delay model and PI controllers. In Proceedings of the 8th IFAC Symposium on Advances in Control Education, Kumamoto, Japan, 21–23 October 2009; Volume 8, pp. 31–36. [Google Scholar]
- Garrido, J.; Ruz, M.L.; Morilla, F.; Vázquez, F. Interactive Tool for Frequency Domain Tuning of PID Controllers. Processes 2018, 6, 197. [Google Scholar] [CrossRef]
- Skogestad, S. Simple analytic rules for model reduction and PID controller tuning. J. Process Control 2003, 13, 291–309. [Google Scholar] [CrossRef]
- Åström, K.J.; Hägglund, T. Advanced PID Control; ISA-The Instrumentation, Systems, and Automation Society: Research Triangle Park, NC, USA, 2005. [Google Scholar]
- Ho, W.K.; Xu, W. PID tuning for unstable processes based on gain and phase-margin specifications. IEE Proc. Control Theory Appl. 1998, 145, 392–396. [Google Scholar] [CrossRef]
- Padma Sree, R.; Srinivas, M.N.; Chidambaram, M. A simple method of tuning PID controllers for stable and unstable FOPTD systems. Comput. Chem. Eng. 2004, 28, 2201–2218. [Google Scholar] [CrossRef]
- Seshagiri Rao, A.; Chidambaram, M. PI/PID Controllers Design for Integrating and Unstable Systems. In PID Control in the Third Millenium; Springer: London, UK, 2012; pp. 45–74. [Google Scholar]
- Pappalardo, C.M.; Guida, D. Adjoint-Based Optimization Procedure for Active Vibration Control of Nonlinear Mechanical Systems. J. Dyn. Syst. Meas. Control 2017, 139, 081010. [Google Scholar] [CrossRef]
- Pappalardo, C.; Guida, D. System Identification Algorithm for Computing the Modal Parameters of Linear Mechanical Systems. Machines 2018, 6, 12. [Google Scholar] [CrossRef]
- Rex Controls s.r.o PIDlab. Available online: www.pidlab.com (accessed on 31 October 2018).
- Balchen, J.G.; Handlykken, M.; Tysso, A. The need for better laboratory experiments in control engineering education. IFAC Proc. Vol. 1981, 14, 3363–3368. [Google Scholar] [CrossRef]
- Dormido, R.; Vargas, H.; Duro, N.; Sánchez, J.; Dormido-Canto, S.; Farias, G.; Esquembre, F.; Dormido, S. Development of a web-based control laboratory for automation technicians: The three-tank system. IEEE Trans. Educ. 2008, 51, 35–44. [Google Scholar] [CrossRef]
- Sánchez, J.; Dormido, S.; Pastor, R.; Morilla, F. A Java/Matlab-Based Environment for Remote Control System Laboratories: Illustrated with an Inverted Pendulum. IEEE Trans. Educ. 2004, 47, 321–329. [Google Scholar] [CrossRef]
- Fragoso, S.; Ruz, M.L.; Garrido, J.; Vázquez, F.; Morilla, F. Educational software tool for decoupling control in wind turbines applied to a lab-scale system. Comput. Appl. Eng. Educ. 2016, 24, 400–411. [Google Scholar] [CrossRef]
- Moodle Home Page. Available online: https://moodle.org/ (accessed on 2 August 2017).













| % control block |
| % anti-windup block |
| Tuning Rule | KP | KI | IAE | TV | GM | PM |
|---|---|---|---|---|---|---|
| AMIGO | 0.021 | 0.022 | 67.87 | 1.32 | 7.6 | 75.7 |
| O’Dwyer | 0.524 | 0.052 | 29.78 | 1.74 | 3 | 60 |
| Ziegler–Nichols | 0.9 | 0.054 | 29.67 | 3.47 | 1.9 | 54.4 |
| Tuning Rule | KP | KI | IAE | TV | IAEREAL | TVREAL |
|---|---|---|---|---|---|---|
| Murril (min. ITAE-servo) | 0.3304 | 0.1265 | 19.77 | 2.05 | 20.90 | 1.92 |
| AMIGO | 0.1302 | 0.0573 | 41.78 | 1.80 | 46.30 | 1.78 |
| Ziegler–Nichols | 0.5152 | 0.0793 | 29.97 | 3.65 | 29.81 | 3.62 |
| Learning Value | |
| Q1 | Did the tool facilitate you to understand new concepts of PI control and FOPTD processes? |
| Q2 | Evaluate if the tool helps you to remember basic concepts about PI control theory. |
| Q3 | Evaluate if you consider the tool useful as a complement of lecture explanations and if it motivates you to learn the explained control concepts. |
| Value added | |
| Q4 | Did you like the practical simulations carried out with the tool? |
| Q5 | Rate if you think you have improved your theoretical knowledge about tuning rules for PI controllers. |
| Q6 | Did the tool help you to understand the practical issues that can arise when implementing a PI control loop? |
| Q7 | Rate the interactive capabilities of the tool. |
| Design usability and easy understanding of the tool | |
| Q8 | Is the graphical user interface of the tool user-friendly? |
| Q9 | Rate if the tool is easy to understand and use. |
| Q10 | Do you think the concepts explained with the tool were easy to follow? |
| Group Items | Strongly Disagree | Disagree | Neutral | Agree | Strongly Agree |
|---|---|---|---|---|---|
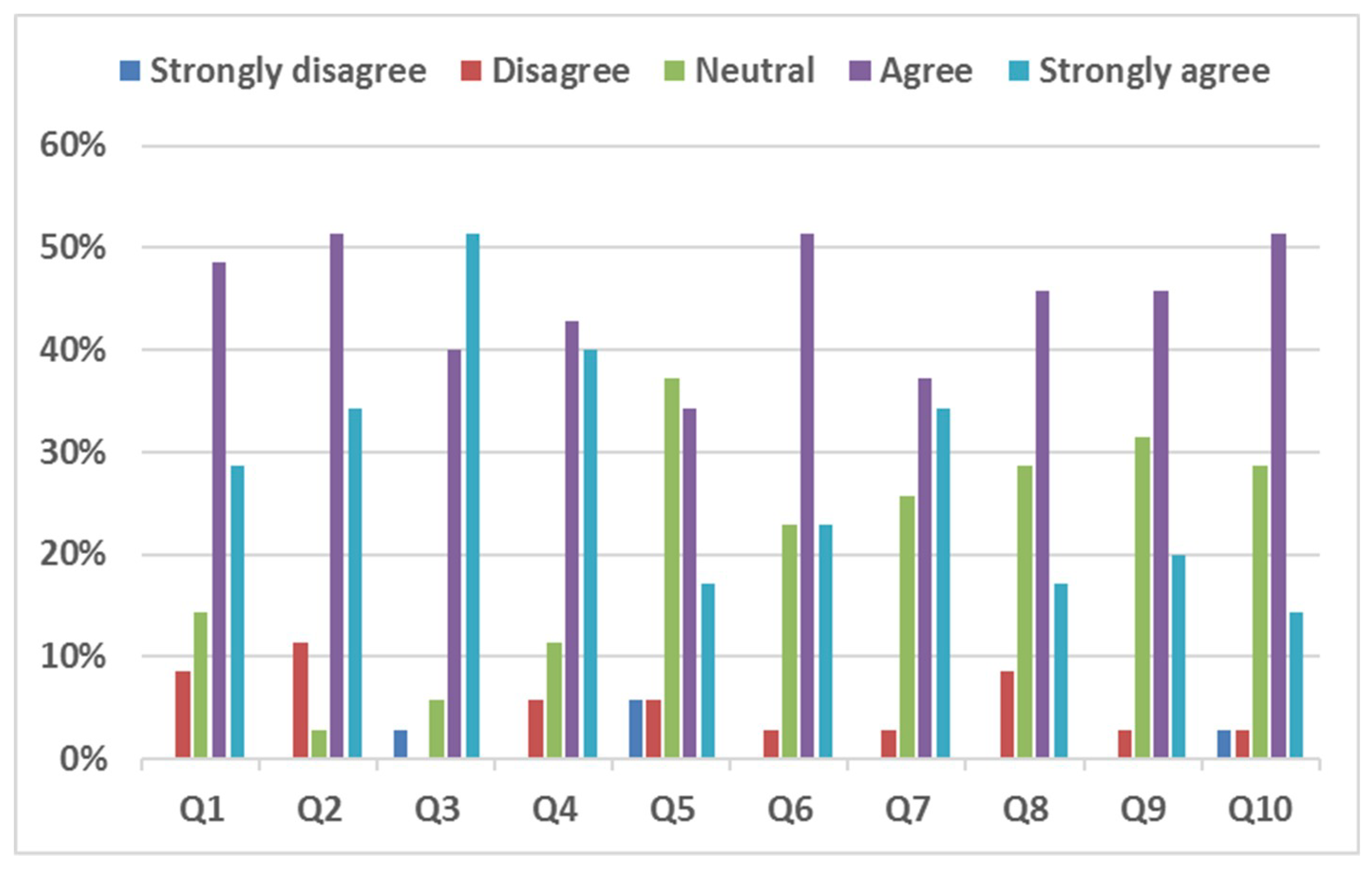
| Learning value (Q1, Q2, Q3) | 0% | 7% | 8% | 47% | 38% |
| Value added (Q4, Q5, Q6, Q7) | 1% | 4% | 24% | 41% | 29% |
| Design usability and easy understanding of the tool (Q8, Q9, Q10) | 0% | 5% | 30% | 48% | 17% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruz, M.L.; Garrido, J.; Vazquez, F.; Morilla, F. Interactive Tuning Tool of Proportional-Integral Controllers for First Order Plus Time Delay Processes. Symmetry 2018, 10, 569. https://doi.org/10.3390/sym10110569
Ruz ML, Garrido J, Vazquez F, Morilla F. Interactive Tuning Tool of Proportional-Integral Controllers for First Order Plus Time Delay Processes. Symmetry. 2018; 10(11):569. https://doi.org/10.3390/sym10110569
Chicago/Turabian StyleRuz, Mario L., Juan Garrido, Francisco Vazquez, and Fernando Morilla. 2018. "Interactive Tuning Tool of Proportional-Integral Controllers for First Order Plus Time Delay Processes" Symmetry 10, no. 11: 569. https://doi.org/10.3390/sym10110569
APA StyleRuz, M. L., Garrido, J., Vazquez, F., & Morilla, F. (2018). Interactive Tuning Tool of Proportional-Integral Controllers for First Order Plus Time Delay Processes. Symmetry, 10(11), 569. https://doi.org/10.3390/sym10110569