Study on an Automatic Parking Method Based on the Sliding Mode Variable Structure and Fuzzy Logical Control


Abstract
:1. Introduction
2. Algorithm of the Sliding Mode Variable Structure Control
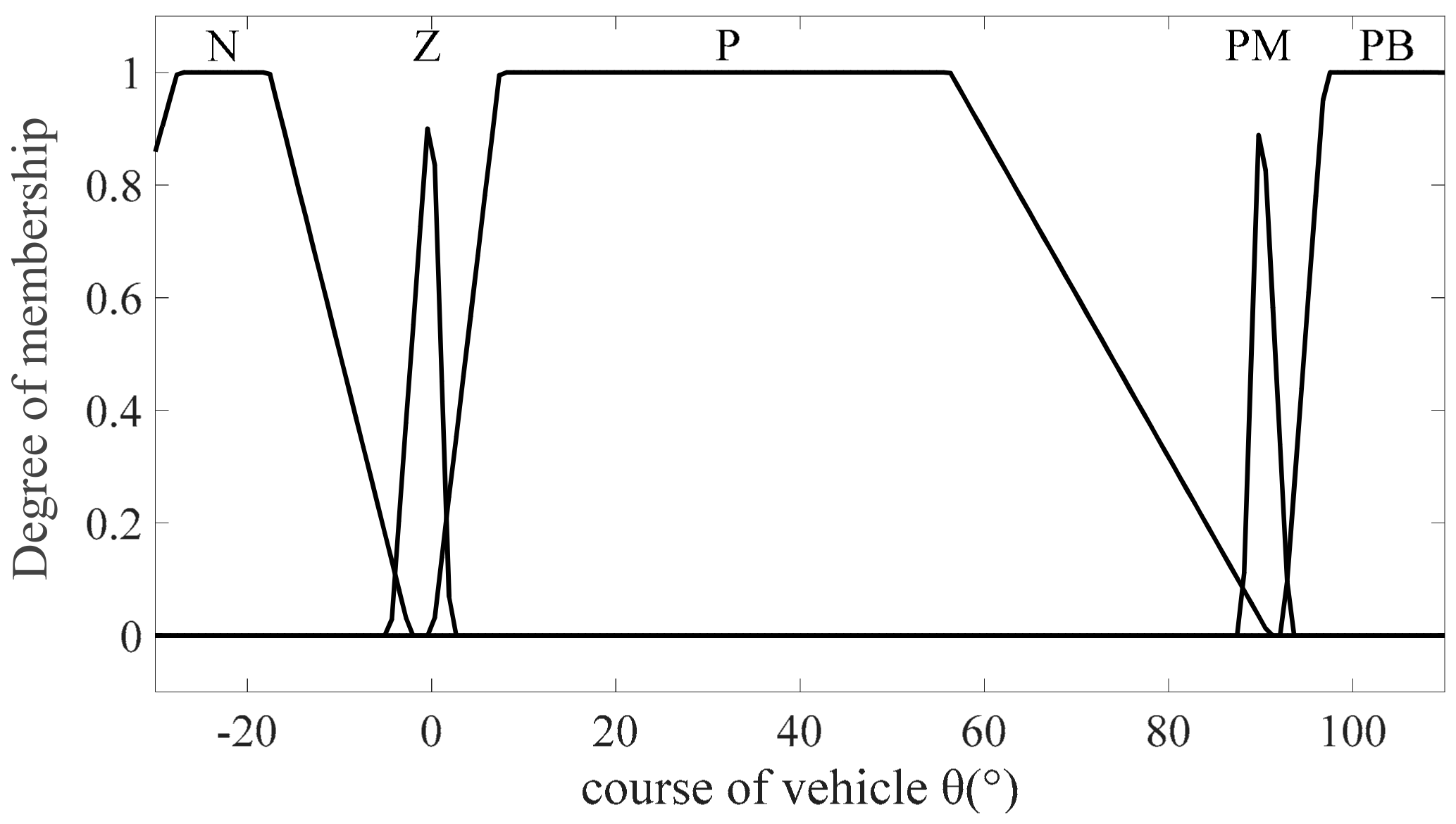
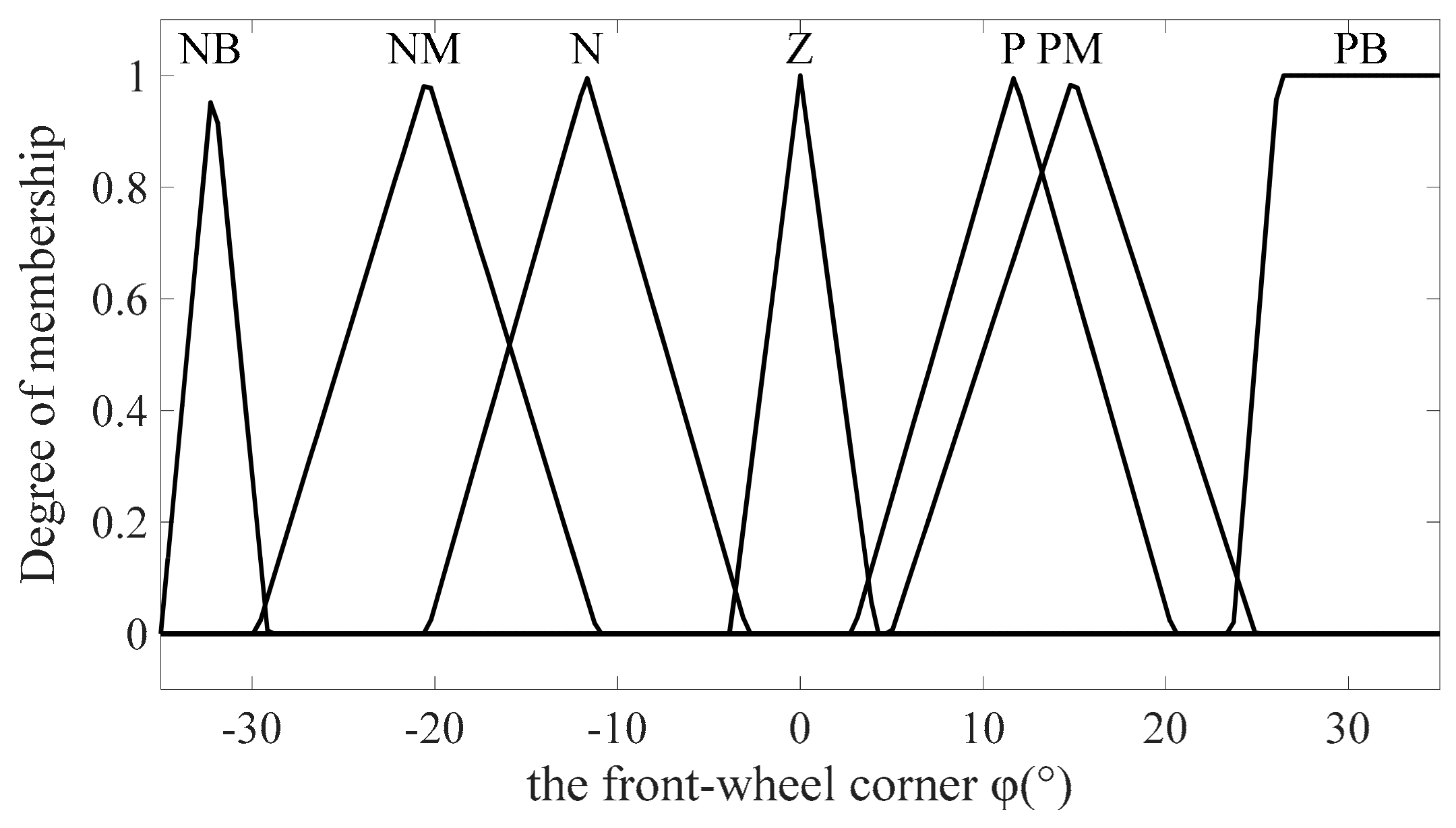
3. Fuzzy Logical Controller
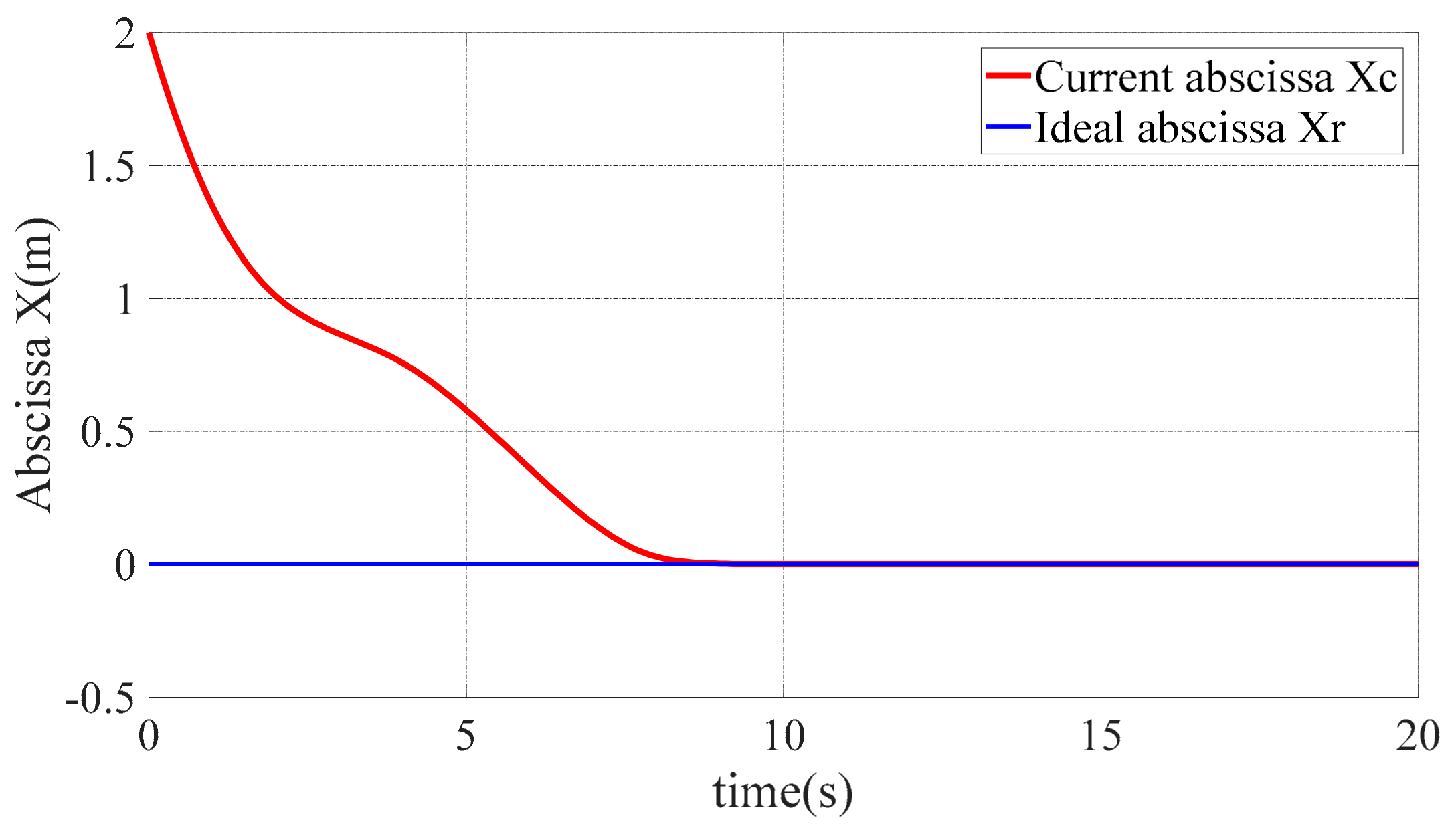
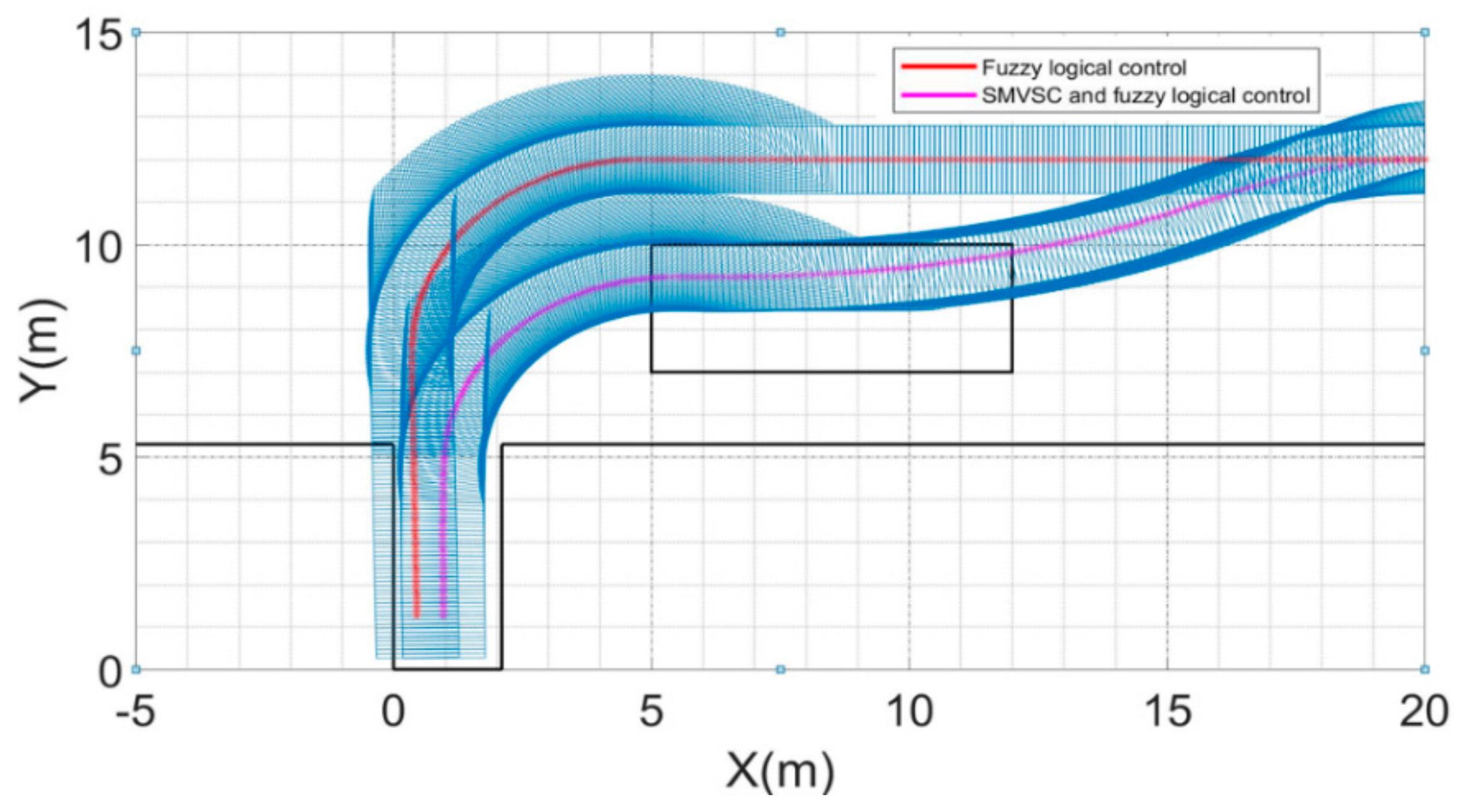
4. Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, W.; Song, Y.; Zhang, J.; Deng, H. Automatic parking of vehicles: A review of literatures. Int. J. Autom. Technol. 2014, 15, 967–978. [Google Scholar] [CrossRef]
- Huang, C.C.; Wang, S.J. A Hierarchical Bayesian Generation Framework for Vacant Parking Space Detection. IEEE Trans. Circ. Syst. Video Technol. 2010, 1770–1785. [Google Scholar] [CrossRef]
- Suhr, J.K.; Jung, H.G. Automatic Parking Space Detection and Tracking for Underground and Indoor Environments. IEEE Trans. Ind. Electron. 2016, 63, 5687–5698. [Google Scholar] [CrossRef]
- Suhr, J.K.; Jung, H.G. Full-automatic recognition of various parking slot markings using a hierarchical tree structure. Opt. Eng. 2013, 52, 7203. [Google Scholar] [CrossRef]
- Li, Y.C.; Yan, J.L.; Wang, M.S.; Han, D.T. Approach for parking spaces detection based on video images. Comput. Eng. Des. 2012, 33, 281–285. [Google Scholar]
- Jung, H.G.; Yun, H.L.; Kim, J. Uniform User Interface for Semiautomatic Parking Slot Marking Recognition. IEEE Trans. Veh. Technol. 2010, 59, 616–626. [Google Scholar] [CrossRef]
- Vorobieva, H.; Glaser, S.; Minoiu-Enache, N.; Mammar, S. Automatic Parallel Parking in Tiny Spots: Path Planning and Control. IEEE Trans. Intell. Transp. Syst. 2015, 16, 396–410. [Google Scholar] [CrossRef]
- Li, B.; Wang, K.; Shao, Z. Time-Optimal Maneuver Planning in Automatic Parallel Parking Using a Simultaneous Dynamic Optimization Approach. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3263–3274. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Chen, G.; Xie, M. Vision-guided automatic parking for smart car. In Proceedings of the IEEE Intelligent Vehicles Symposium 2000, Dearborn, MI, USA, 5 October 2002; pp. 725–730. [Google Scholar] [Green Version]
- Sugeno, M.; Murakami, K. Fuzzy parking control of model car. In Proceedings of the 23rd IEEE Conference on Decision and Control, Las Vegas, Nevada, USA, 12–14 December 1984; pp. 902–903. [Google Scholar]
- Zhao, Y.; Emmanuel, G.C., Jr. Robust automatic parallel parking in tight spaces via fuzzy logic. Robot. Auton. Syst. 2005, 51, 111–127. [Google Scholar] [CrossRef]
- Aye, Y.Y.; Watanabe, K.; Maeyama, S.; Nagai, I. An automatic parking system using an optimized image-based fuzzy controller by genetic algorithms. Artif. Life Robot. 2016, 22, 1–6. [Google Scholar] [CrossRef]
- Kong, S.G.; Kosko, B. Adaptive fuzzy systems for backing up a truck-and-trailer. IEEE Trans. Neural Netw. 1992, 3, 211–223. [Google Scholar] [CrossRef] [PubMed]
- Liang, Z.; Zheng, G.Q.; Li, J.-S. Tracking Controller Based on Self-Organizing Fuzzy Control. Fire Control Commun. Control 2013, 38, 50–54. [Google Scholar]
- Xiong, Z.B.; Yang, W.; Ding, K.; Liang, F.-H.; Zheng, L.; Li, Y.-S.; Chang’an Auto Global R&D Center; Chang’an Automobile Co., Ltd.; The State Key Laboratory of Mechanical Transmissions, Chongqing University. Research on the Auto Parking Algorithm Based on the Preview Fuzzy Control. J. Chongqing Univ. Technol. 2017, 17, 323–325. [Google Scholar]
- Grzegorzewski, P. On Separability of Fuzzy Relations. Int. J. Fuzzy Logic Intell. Syst. 2017, 17, 137–144. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Collins, E.G. Fuzzy parallel parking control of autonomous ground vehicles in tight spaces. In Proceedings of the IEEE International Symposium on Intelligent Control, Houston, TX, USA, 8 October 2003; pp. 811–816. [Google Scholar]
- Edwards, C.; Spurgeon, S.K. Sliding Mode Control: Theory and Applications; Taylor & Francis: Boca Raton, FL, USA, 1988. [Google Scholar]
- Schindele, D.; Aschemann, H. Trajectory tracking of a pneumatically driven parallel robot using higher-order SMC. IEEE Int. Conf. Methods Models Autom. Robot. 2010, 387–392. [Google Scholar] [CrossRef]
- Yue, M.; Hou, X.; Fan, M.; Jia, R. Coordinated trajectory tracking control for an underactuated tractor-trailer vehicle via MPC and SMC approaches. In Proceedings of the 2017 2nd International Conference on Advanced Robotics and Mechatronics (ICARM), Hefei, China, 27–31 August 2017; pp. 82–87. [Google Scholar]
- Tahara, J.I.; Tsuboi, K.; Sawano, T.; Nagata, Y. An adaptive VSS control method with integral type switching gain. In Proceedings of the IASTED International Conference Robotics and Applications, Clearwater, FL, USA, 19–22 November 2001; pp. 106–111. [Google Scholar]
- Jiang, L.; Zhongwei, W.U. Sliding Mode Control for Intelligent Vehicle Trajectory Tracking Based on Reaching Law. Trans. Chin. Soc. Agric. Mach. 2018, 49, 381–386. [Google Scholar]
- He, H.; Peng, J.; Xiong, R.; Fan, H. An Acceleration Slip Regulation Strategy for Four-Wheel Drive Electric Vehicles Based on Sliding Mode Control. Energies 2014, 7, 3748–3763. [Google Scholar] [CrossRef] [Green Version]
- Lanza, J.; Sánchez, L.; Gutiérrez, V.; Galache, J.A.; Santana, J.R.; Sotres, P.; Muñoz, L. Smart City Services over a Future Internet Platform Based on Internet of Things and Cloud: The Smart Parking Case. Energies 2016, 9, 719. [Google Scholar] [CrossRef]
- Mamdani, E.H. Application of fuzzy algorithms for control of simple dynamic plant. Proc. Inst. Electr. Eng. 1974, 121, 1585–1588. [Google Scholar] [CrossRef]
- Hua, Y.; Jiang, H.; Cai, Y.; Zhang, X.; Ma, S.; Wu, D. Path Tracking Control of Automatic Parking Cloud Model Considering the Influence of Time-delay. Math. Probl. Eng. 2017, 2017, 6590383. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input | Output | |||||||
|---|---|---|---|---|---|---|---|---|
| Fuzzy Subset | S | Triangular | S | Triangular | N | Trapezoidal | NB | Triangular |
| [−0.23,0.20,0.57] | [−0.30,0.40,1.21] | [−44.6,−27.6,−17.6,−2.30] | [−35,−32.14,−29.15] | |||||
| B | Triangular | B | Triangular | Z | Triangular | NM | Triangular | |
| [0.40,0.70,1.00] | [0.94,1.65,2.24] | [−4.46,0,2.03] | [−29.77,−20.43,−11.09] | |||||
| P | Triangular | PM | Triangular | P | Trapezoidal | N | Triangular | |
| [0.93,1.47,1.92] | [2.18,2.52,2.75] | [0.11,7.37,56.3,91] | [−20.43,−11.71,−2.87] | |||||
| PB | Trapezoidal | PB | Trapezoidal | PM | Triangular | Z | Triangular | |
| [1.74,2.14,2.37,2.50] | [2.75,3.23,4.40,5.40] | [88,90,93.2] | [−3.85,0,4.12] | |||||
| PB | Trapezoidal | P | Triangular | |||||
| [92.45,97,120,120] | [2.87,11.71,20.43] | |||||||
| PM | Triangular | |||||||
| [4.98,14.95,24.91] | ||||||||
| PB | Trapezoidal | |||||||
| [23.67,26.16,37.37,37.37] | ||||||||
| S | B | PM | PB | ||
|---|---|---|---|---|---|
| θ | |||||
| N | – | – | – | – | |
| Z | – | – | – | – | |
| P | NB | NB | – | – | |
| PM | Z | – | – | – | |
| PB | – | – | – | – | |
| S | B | PM | PB | ||
|---|---|---|---|---|---|
| θ | |||||
| N | – | – | – | – | |
| Z | – | – | – | – | |
| P | – | NB | – | – | |
| PM | – | – | – | – | |
| PB | – | – | – | – | |
| S | B | PM | PB | ||
|---|---|---|---|---|---|
| θ | |||||
| N | – | – | – | – | |
| Z | – | NB | – | – | |
| P | – | NB | – | – | |
| PM | – | – | – | – | |
| PB | – | – | – | – | |
| S | B | PM | PB | ||
|---|---|---|---|---|---|
| θ | |||||
| N | – | NB | – | – | |
| Z | – | Z | – | – | |
| P | – | PB | – | – | |
| PM | – | – | – | – | |
| PB | – | – | – | – | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.; Lu, Z.; Shan, X.; Jia, W.; Wei, B.; Wang, Y. Study on an Automatic Parking Method Based on the Sliding Mode Variable Structure and Fuzzy Logical Control. Symmetry 2018, 10, 523. https://doi.org/10.3390/sym10100523
Xu Y, Lu Z, Shan X, Jia W, Wei B, Wang Y. Study on an Automatic Parking Method Based on the Sliding Mode Variable Structure and Fuzzy Logical Control. Symmetry. 2018; 10(10):523. https://doi.org/10.3390/sym10100523
Chicago/Turabian StyleXu, Ying, Zefeng Lu, Xin Shan, Wenhao Jia, Bo Wei, and Yingqing Wang. 2018. "Study on an Automatic Parking Method Based on the Sliding Mode Variable Structure and Fuzzy Logical Control" Symmetry 10, no. 10: 523. https://doi.org/10.3390/sym10100523
APA StyleXu, Y., Lu, Z., Shan, X., Jia, W., Wei, B., & Wang, Y. (2018). Study on an Automatic Parking Method Based on the Sliding Mode Variable Structure and Fuzzy Logical Control. Symmetry, 10(10), 523. https://doi.org/10.3390/sym10100523