1. Introduction
The coefficient of heat conductivity is a thermal property of soils that is important for correct representation of soil–atmosphere interactions in numerical weather prediction and Earth system models. A variety of parameterizations have been proposed for heat conductivity [
1], which have different accuracies for different types of soil and soil states. Thus, robust measurement techniques are needed for further improvement of such models.
The coefficient of heat conductivity
for any material is defined in the phenomenological Fourier law for heat flux:
where
q is the heat flux,
T is temperature, and
z is spatial coordinate parallel to temperature gradient.
For multicomponent environments, Equation (
1) is also used, but
is now the effective thermal conductivity of the medium, which depends on its structure and thermal conductivity of its components [
2,
3,
4]. Since the arrangement of the medium components is usually chaotic, and the surfaces separating them are extremely complex, the method of two-sided estimates is used for calculating the thermal conductivity [
5]. In this method, the medium is considered as a set of flat, regularly alternating isotropic layers that fill its entire volume. Thermal conductivity may be calculated for heat flux along the layers (Voigt model), which provides the upper estimate for
, and across the layers (Reuss model), which is the lower estimate. For the real structure of the medium, a combination of these models is applied. This approach has been used to calculate the thermal conductivity of snow [
6,
7] and moss [
8]. A similar approach, but taking into account the larger number of medium components (solid particles, water and air), is typically used to compute the thermal conductivity of soil [
1,
9]. This technique, in particular, facilitates the study of porosity and liquid water saturation effect on the thermal conductivity of various media.
Direct measurement of the thermal conductivity coefficient of natural objects (soils, rocks, vegetation, snow, etc.) can be carried out both in the field and in laboratory conditions [
10,
11,
12,
13,
14,
15]. In field conditions, the thermal conductivity coefficient may be determined from the measured heat flux and temperature gradient in the material [
16]. Laboratory methods use special equipment and are divided into stationary and non-stationary methods. Stationary methods are based directly on Fourier’s law, and the heat flux through the sample over time reaches a steady state; in non-stationary methods, the heat flux does not reach a constant value.
Stationary methods may use either an absolute (direct) or relative approach. In direct measurements, thermal conductivity is calculated directly from the experimentally found values. Relative methods require a reference material with a known thermal conductivity. Of the absolute methods, the controlled hot plate method [
17] and the cylinder method [
18] are the most applicable. Relative methods include the heat-flux meter method [
19], the direct heating method (Kohlrausch method) [
20] and hot wire method [
21].
Non-stationary methods allow for direct measurement of the thermal conductivity. These include the frequency division method [
22] and the laser flash method [
23]. In work [
24], the advantage of non-stationary methods for laboratory studies of soils and grounds, in particular, using thermal needle probes, is shown, since in addition to the shortening of the study (no wait for a stationary thermal regime is required), the sample does not lose moisture during the study.
Direct measurements of heat conductivity mentioned above require deployment of additional sensors in soils or transport of samples to a lab, whereas efficient use of conventional devices such as temperature sensors and heat-flux plates for estimation of , would substantially increase the number of sites, where soil heat conductivity is assessed.
This paper formulates a generalized method for obtaining soil thermal conductivity as a solution of the inverse problem. It extends the method which uses three-level temperature measurements developed in [
25,
26,
27] by considering a case, where heat-flux observations are available. The sensitivity of the inverse problem solution to input data errors is studied, and the accuracy of the method is compared to that of the traditional Fourier approach and contemporary thermal conductivity sensors. Finally, an inverse problem method is verified using data of measurements in a water-saturated moss layer in Western Siberia.
2. Materials and Methods
Consider a heat conductance problem in a medium which has homogeneous spatial distribution of thermodynamic properties:
where
is a thermal diffusivity coefficient,
is density,
c is specific heat capacity (all are constants),
are differential operators of boundary conditions (hereafter, we assume
, with
I standing for unity operator, implying Dirichlet boundary conditions), bottom indices
z and
t denote derivatives on time and depth. If
a is known, then a problem of finding a function
satisfying Equation (
2), boundary (
3) and initial (
4) conditions is called a direct problem. However, very often
a is unknown, whereas additional information on solution
is available, e.g., measurements of temperature at an intermediate depth
expressed by a function
. In this case, one may pose a problem of seeking
a given this additional constraint; this classical kind of problem is called
an inverse problem. Specifically, the solution of inverse problem is
where
is a solution of (
2)–(
4) under given
,
is an appropriately chosen norm, and
is an observed temperature field. In the following, we assume that the volumetric heat capacity
is known, so that for each value of temperature diffusivity,
a, the heat conductivity
is found automatically. The norm in (
5) may be defined in different ways, depending on which temperature data are available. In a more general case, the objective function to be minimized on
may be defined as a sum of norms containing different functions of
, which are measured, say, heat flux. For instance, a sensor of temperature is deployed at depth
, and a heat flux sensor is installed at depth
. In this case, the objective (loss) function to be minimized is a sum of respective norms:
Here, constants
and
are non-negative weights which may be chosen as inversely proportional to standard errors of respective measurements, and
is the measured heat flux. In (
6), the temperature difference norm is summed up with a norm of heat flux difference. The two typical measurement settings used in soil active layer monitoring lead to the following inverse problem specifications:
; the data of three temperature loggers at different depths are used (
is RMSE of temperature squared) (this method coincides with that used in [
25,
26,
27]), hereafter referred to as TEMP method (hereafter, the depth of measurements for this setting is denoted as
);
; the data of two temperature sensors and a heat flux plate located in between are used ( is the RMSE of heat flux squared), hereafter referred to as the FLUX method (hereafter, the depth of measurements for this setting is denoted as ).
Calculation of
is performed after solving the direct numerical problem (
2)–(
4) at a given
, and minimization of
may be attained by a number of methods e.g., Monte-Carlo simulations [
28] or gradient descent method. The latter is used in this study in Barzilai–Borwein modification [
29]. As both
and
are measured with error, the sensitivity of
to those errors must be assessed. For reference, we compare
obtained by the method described above to estimates from the classical Fourier solution:
(
h and
are diurnal temperature magnitudes at the top and bottom of the layer considered), and the accuracy of heat conductivity sensors available on the market.
The measurements of soil temperature have been conducted on Mukhrino bog station in Western Siberia in summer 6–20 June 2019, (
Figure 1). The sensors were placed in the
Sphagnum moss layer 5–25 cm below surface, with the entire layer located beneath the water level. Davis Instruments stainless steel temperature probes with two-wire termination were deployed at depths 5, 15, and 25 cm. The advantage of this experimental setup for testing the method of thermal conductivity derivation (in TEMP configuration) is that the “true” temperature conductivity of the moss layer is known to a high-accuracy: water constituted about 97.5% of the layer by mass, whereas the almost permanently stable stratification prevented convective motions [
30], so that the thermal conductivity of the layer is close to molecular conductivity of water,
(see a more exact estimate below in this section).
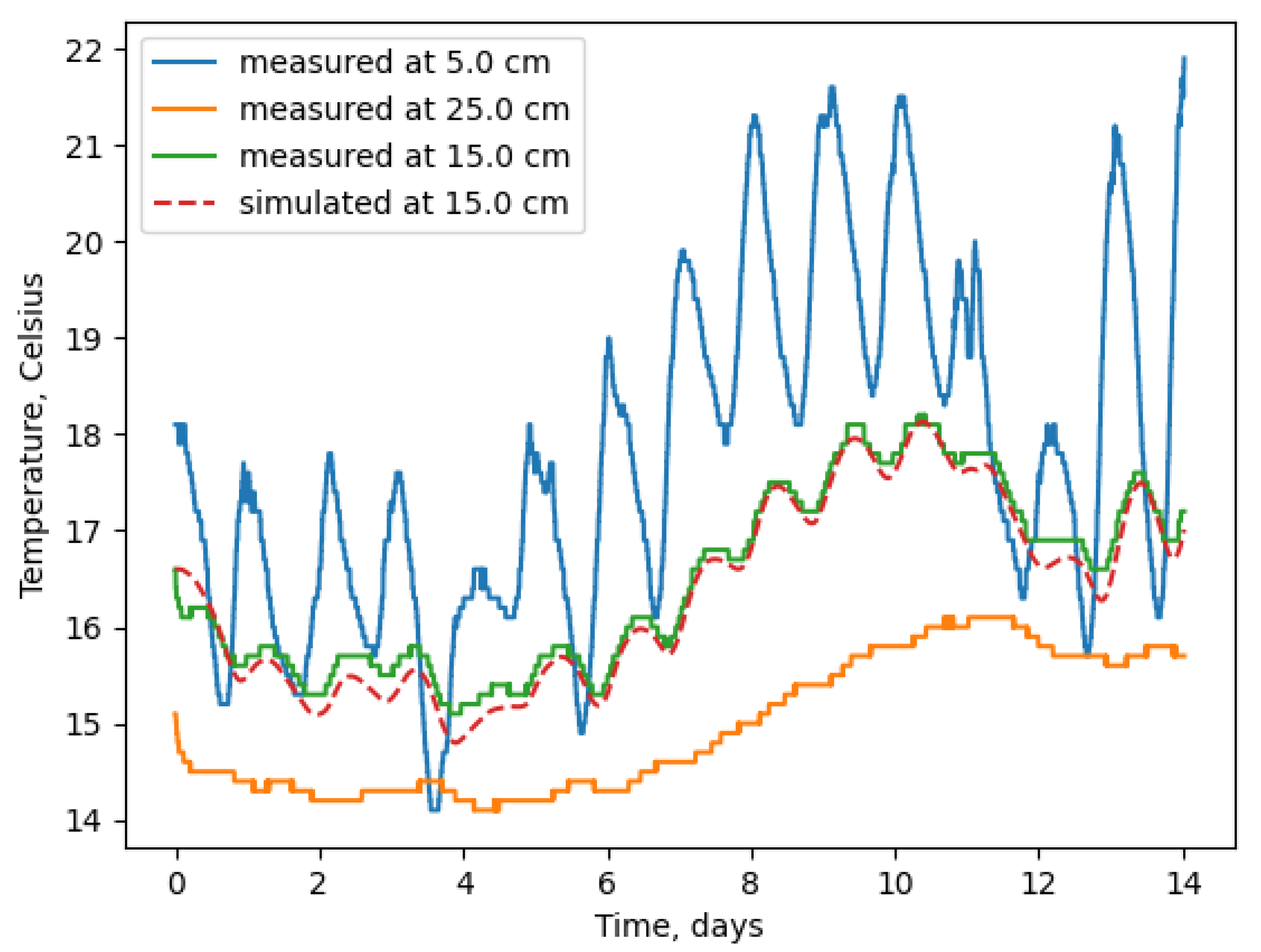
We performed two tests of the method proposed. In the first test, the measured temperature series at 5 and 25 cm are used as boundary conditions to compute temperature and heat flux series at 15 cm by solving (
2)–(
4) under
(the PDE solver uses the scheme, which is central-difference in space and implicit in time). Thus produced series at 15 cm are then used as true solution (or “measured” series) to solve the inverse problem for
a with the same top and bottom boundary conditions as in a direct problem. In specification of
, (
6), temperature series in TEMP settings are used in a 1 min time step, and the heat flux in the FLUX problem is given with a 30 min time step (i.e., averaged inside consecutive 30-min intervals of “true” solution); the latter is a typical averaging interval of observed heat flux in soil monitoring practice. Thus, the accuracy of the method is estimated.
The sensitivity of the method accuracy to the error of temperature (at all three depths) and heat flux (in the middle of layer) series was assessed in this first test. The error for temperature is given by Gaussian noise that is uncorrelated in time with mean ±0.1
C (typical for conventional temperature sensors) and
= 0.1
C; assuming mean error values −0.1
C, 0
C, +0.1
C at each of three levels provides 27 combinations, some of which are equivalent. For heat flux, we assume a constant relative error ±15%, which can be seen as an upper estimate for the modern heat-flux plates (see, e.g., [
31]). In addition, the error of sensors’ positions is introduced to sensitivity analysis, assuming they are ±1 cm for each temperature sensor, again providing 27 combinations; the effect of the same error in the level of heat flux sensor deployment is estimated as well.
In the second test, the measured temperature series at 5 cm, 15 cm and 25 cm of moss layer of Mukhrino bog are used to solve the TEMP type of inverse problem (
Figure 2). The difference to the first test is that for a 15 cm depth,
measured temperature series are used (instead of series precomputed with “true” temperature diffusivity
), and thus the resulting
value is compared to
a estimated for this water-saturated moss layer given the measured water and organics mass fractions (see below). The similar test of the FLUX-type inverse problem solution was not carried out, as we did not have reliable
observed heat flux data from the field campaign.
On the Mukhrino field station, we sampled the top of the moss layer to obtain the values of water and organics mass fractions,
and
, respectively (
). Given these parameters, the moss layer porosity
p, the volumetric heat capacity
, heat conductivity coefficient
, and thermal conductivity coefficient
a, are:
Given the measured value
, and the values of other parameters
J/(kg·K) [
32,
33,
34],
J/(kg·K),
kg/m
,
kg/m
,
W/(m·K) [
33],
W/(m·K), we obtain
W/(m·K). Here, the widely accepted geometrical mean is used to estimate the heat conductivity
of water-saturated soil.
3. Results and Discussion
We start with the first (synthetic) test of the inverse problem method. The error of the heat conduction coefficient found by solving the inverse problem formulated in the previous section significantly depends on the type and magnitude of the input data error (
Table 1). In the table, of all the combinations of input data systematic errors, only those with the largest impact on inverse problem solution are shown. In addition, for each series of experiments, the
values using zero mean errors are given. The loss function in this case attains the level of stochastic error magnitude of temperature or heat flux, respectively; the solution
is 0.2–0.5% different from the reference value
. The latter deviations are partly due to inaccuracy of the numerical minimization procedure.
According to
Table 1, the smallest uncertainty of
is caused by systematic shifts in measured temperature in the TEMP method, not exceeding 3% by absolute value. The sign of error here coincides with that of
, implying that the temperature error at the bottom boundary is less important compared to uncertainties at two other levels. In the FLUX method, the uncertainty of
% in heat flux measurements causes the deviation of
from “true” value
up to ±20%, where
has the same sign as the heat flux relative error
; at a given
choosing different combinations of top and bottom temperature errors does not considerably change the deviation
. Thus, the FLUX method is much less precise, than the TEMP method, if considering only the accuracy of sensor readings. However, the sensitivity of solution
to sensor deployment errors of ±1 cm is much larger for the TEMP method, reaching more than 40% compared to less than 15% in the FLUX method. In both methods, the error sign is the same as that of
, again suggesting that observation uncertainties at the middle and top levels have more impact on solution
compared to those at the bottom.
For interpretation of errors
obtained in numerical simulations, the standard Fourier solution (“Fourier law”) for the heat conduction problem provides a convenient framework, because it is tractable analytically. The errors of inverse problem solution due to sensor inaccuracies and vertical displacement are (see
Appendix A) as follows:
for TEMP setting and
for FLUX setting, where
,
, and
(
T—period of temperature oscillations). Note that the change of sign has been made before
to conform with different displacement definitions used in numerical experiments of
Table 1 compared to derivation in
Appendix A.
Strictly speaking, estimates of uncertainty from Fourier law are not directly comparable to uncertainties of numerical solution of the inverse problem as the Fourier solution assumes a different lower boundary condition and single-harmonic oscillation at the upper boundary; still these estimates well conform with the numerical results in
Table 1. Indeed, the small values of uncertainty due to systematic temperature measurement errors in the TEMP problem setup agree with
from Fourier theory and are anticipated to reduce with extension of the time period studied
1. Then, from Fourier theory, for the sensor depth error
m, we obtain the relative error of 20% and 40% in
, respectively, which is again in accordance with
Table 1.
For the FLUX inverse problem, in analytical estimates, we have dependence of
on period
T, which complicates the analysis. In
Figure 2, one can see two pronounced periods comprising temperature series used as boundary conditions: the diurnal period and the synoptic period—the latter can be estimated as 12 days. For these two periods and
%, the above analytical estimates provide
and 18.6%, respectively; the corresponding value in
Table 1 (for
K) is 16.6%, and it resides in the interval between these two values. The uncertainties of
due to flux sensor depth displacement presented in the table are not well reproduced by Fourier theory, as they demonstrate a strong influence of the lower boundary, which is not included in Fourier law. Nevertheless, the sign of the error is correctly predicted by the formula (
16), which also provides values in a range from numerical simulations.
Now turn to the second test ot the method, where the computed optimal
was compared to in-situ estimated thermal conductivity. The optimal value
W/(m·K), is −7.2% from 0.554 W/(m·K), a reference value, estimated from moss sampling (see
Section 2). There are at least two possible reasons for this discrepancy. First, the wooden rod used to deploy temperature sensors disturbed the natural moss medium and affected heat transport; this effect is not straightforward to quantify; however, one may notice that the heat conductivity of dry wood is about 2 times less than that of water, i.e., 0.2–0.3 W/(m·K) [
35], which means it could contribute to reduction of apparent
a, obtained from data of sensors attached to this rod. The second reason is the error in sensor depth. Setting the middle thermistor depth error as
and 4 mm provides an inverse problem solution
W/(m·K) (−2.7%) and
W/(m·K) (+2.3%), suggesting that the thermistor might have been placed 3–4 mm below the expected depth in the moss layer. This estimate is realistic given the technical procedure of the sensors’ deployment in our field experiment. The temperature series corresponding to these optimal values are shifted from measured data by 0.1–0.2 K (
Figure 2), which can be explained by the mean thermistor error.
Using the Fourier formula (
7), we obtain the daily values of
from Mukhrino bog data, which have a mean over 14 days 1.03 W/(m·K) (+85.92%) with root mean square deviation 0.58 W/(m·K). The reason for this large error is a proximity of the diurnal magnitude of temperature variations at depth 25 cm to the measurement accuracy of 0.1
C. Moreover, at days 6–12, the diurnal cycle is not discernible at a background of synoptic trend.
Given the measurement accuracy of modern thermal needle systems
% [
36] for the heat conductivity coefficient, we may note the following. Using the TEMP inverse problem solution provides better accuracy for
a if the sensors are located exactly at the expected depths; this requires much care during the deployment procedure, because the TEMP method is very sensitive to depth mislocation. For the FLUX method, errors of modern heat flux plates must be reduced by about 3 times to obtain the same accuracy as thermal needle systems provide; the high accuracy in terms of the depth of the sensor is not as important as in the TEMP method case.
This work proposes a generalized inverse problem formulation for heat transfer in soils not undergoing phase changes. A special case of this problem statement, called TEMP configuration in this paper, was applied in the previous works [
25,
26,
27,
37] to northern soils. We propose to use heat flux plate measurements in between two temperature sensors as an alternative setting for estimation of the optimal thermal diffusivity. In addition, for the first time, we numerically and analytically estimate the inverse solution uncertainty due to errors of input data, which are Gaussian noise and systematic errors in temperature and heat flux observations as well as the shifts in deployment depths. The future derivations of thermal conductivity using the same instrumental settings may be now accompanied by similar uncertainty estimates.






{kind=link}
{kind=link}