Design and Modeling of an Adaptively Controlled Rainwater Harvesting System


Abstract
:1. Introduction
2. Materials and Methods
2.1. Inputs
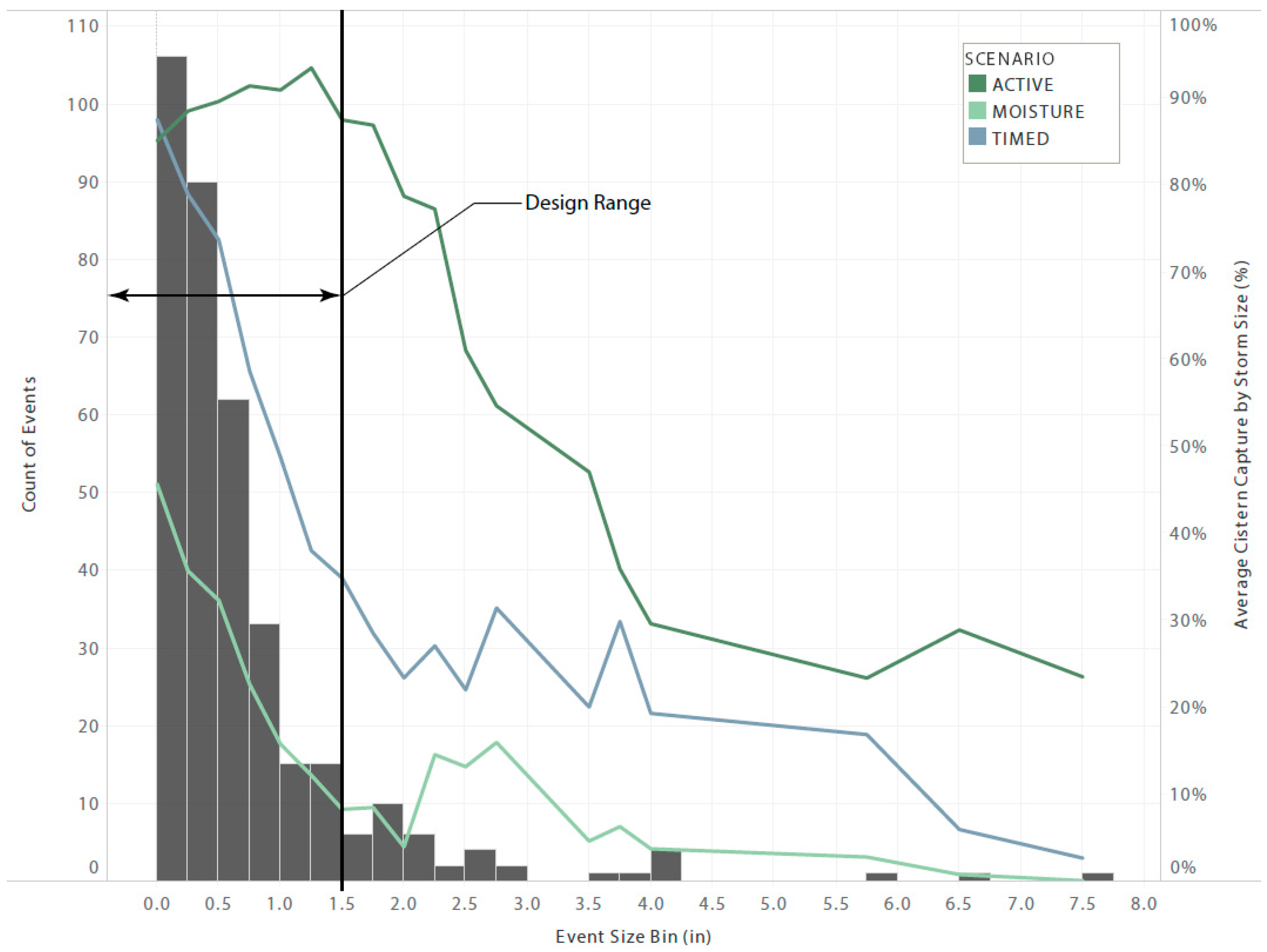
2.1.1. Precipitation
- Total Precipitation: 1172.7 cm;
- Number of Precipitation Events: 652;
- Largest Precipitation Event: 19.2 cm over 77 h (beginning on 12 October 2005).
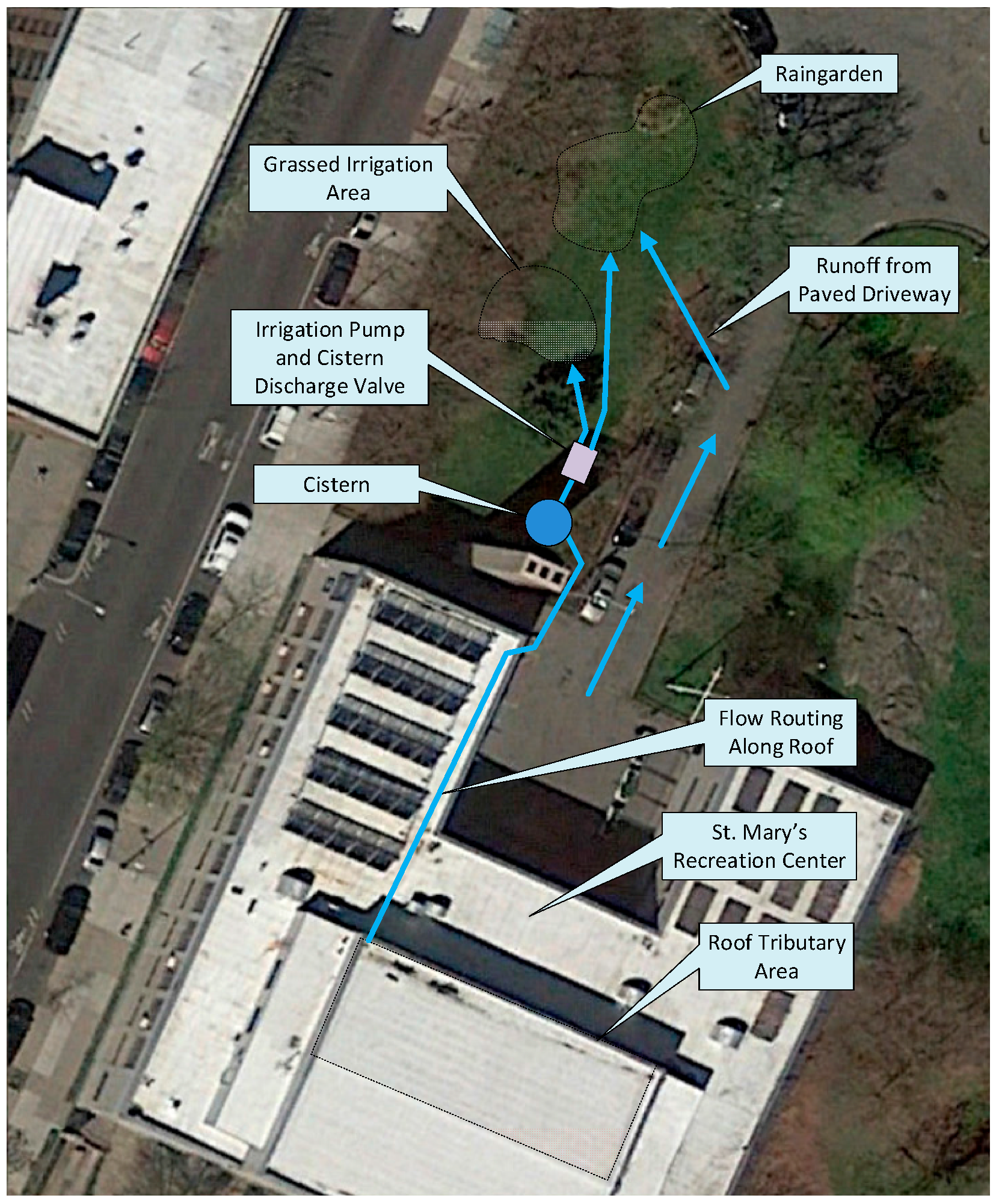
2.1.2. Subcatchments
2.1.3. Infiltration
2.1.4. Evapotranspiration
2.1.5. Cistern Geometry
2.1.6. Raingarden Geometry
2.1.7. Irrigation Area
2.1.8. Irrigation Demand and Delivery
3. Results
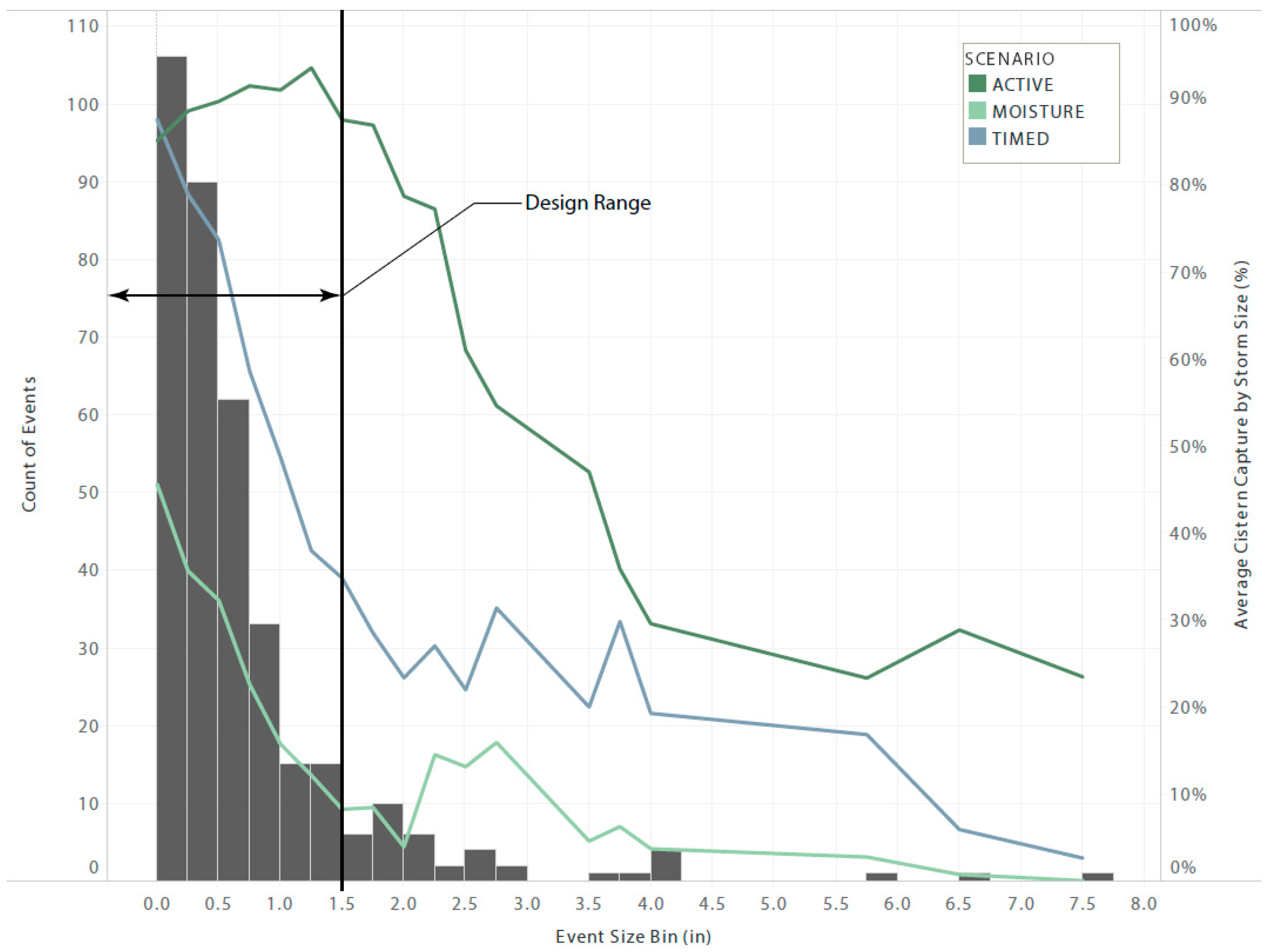
3.1. Model Scenarios
- The Base Scenario (i.e., existing conditions) was developed to simulate unmanaged runoff to the site outfall to the combined sewer system as a point of reference to compare the performance of the other model scenarios. All subcatchment runoff (i.e., roof, driveway, lawn) was routed directly to the site outfall.
- The Timed Scenario was developed to simulate conventional timer based operation of a rainwater harvesting system by irrigating the grassed irrigation area from harvested rainwater stored in the cistern at a pre-determined time each day (“irrigation use”). It is expected that this scenario will result in the most irrigation use of all scenarios.
- The Moisture Scenario was developed to simulate “smarter” irrigation by maintaining optimal soil moisture within the root zone of the grassed irrigation area (i.e., the range between the soil’s AD and FC). It is expected that irrigation will be required less frequently during months where PET is low (e.g., May, October) and immediately after precipitation events and that this scenario will result in less irrigation use than that of the Timed Scenario.
- The Active Scenario was developed to pair moisture based irrigation with forecast-based logic and adaptive control of the cistern’s discharge valve. The purpose of this simulation is to demonstrate the operation and benefits of a completely automated CMAC system. Logic rules were designed to minimize overflow from the cistern to the raingarden during periods of active rainfall (“wet weather”) and to minimize irrigation use. Overflow from the cistern is minimized as follows: When the predicted runoff volume from the roof subcatchment (due to an approaching rainfall event) exceeds the available storage volume in the cistern, stored water is released to the raingarden through the controlled discharge valve before rainfall begins (during dry weather) to maximize storage capacity within the cistern for the approaching rainfall event.
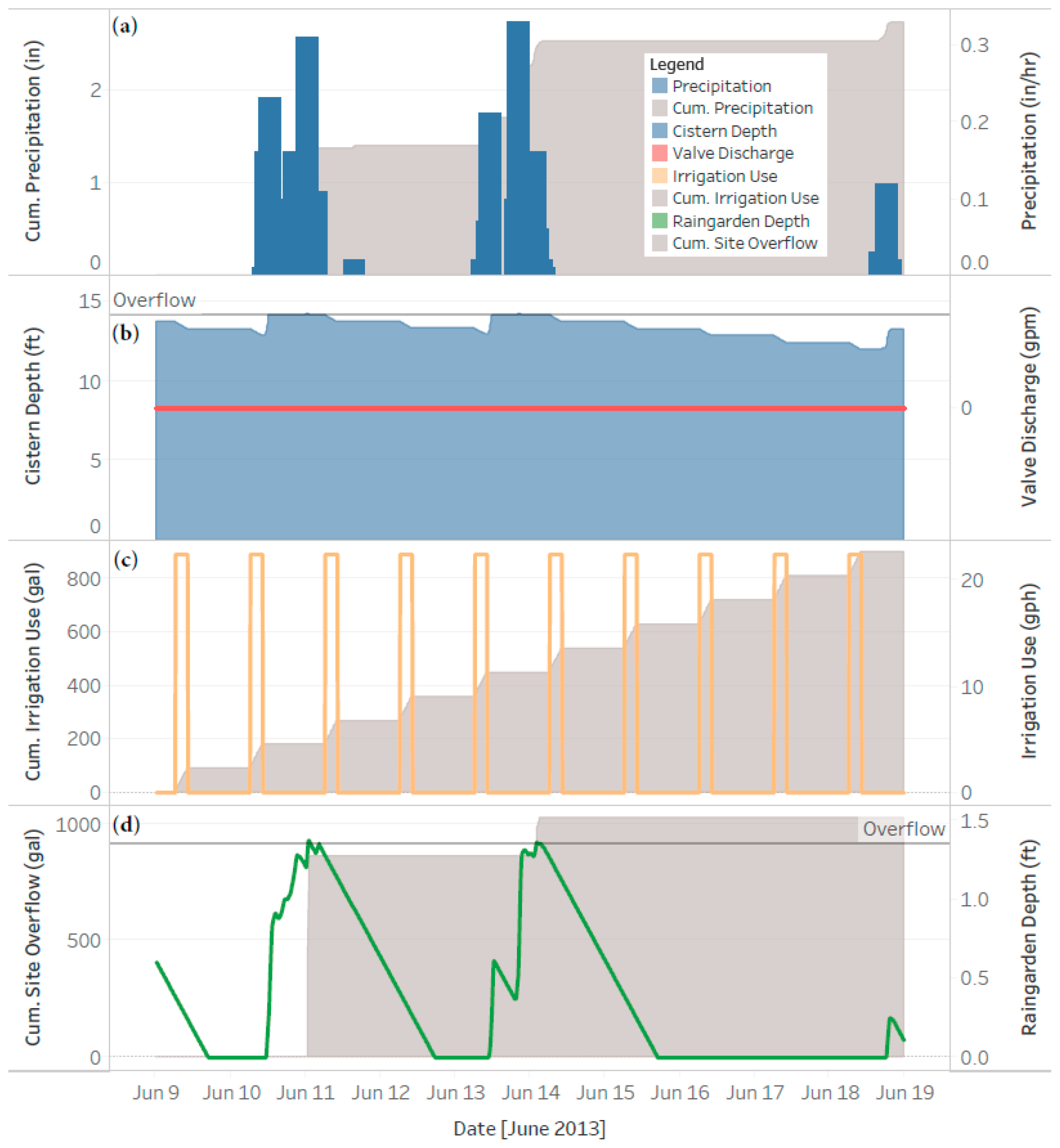
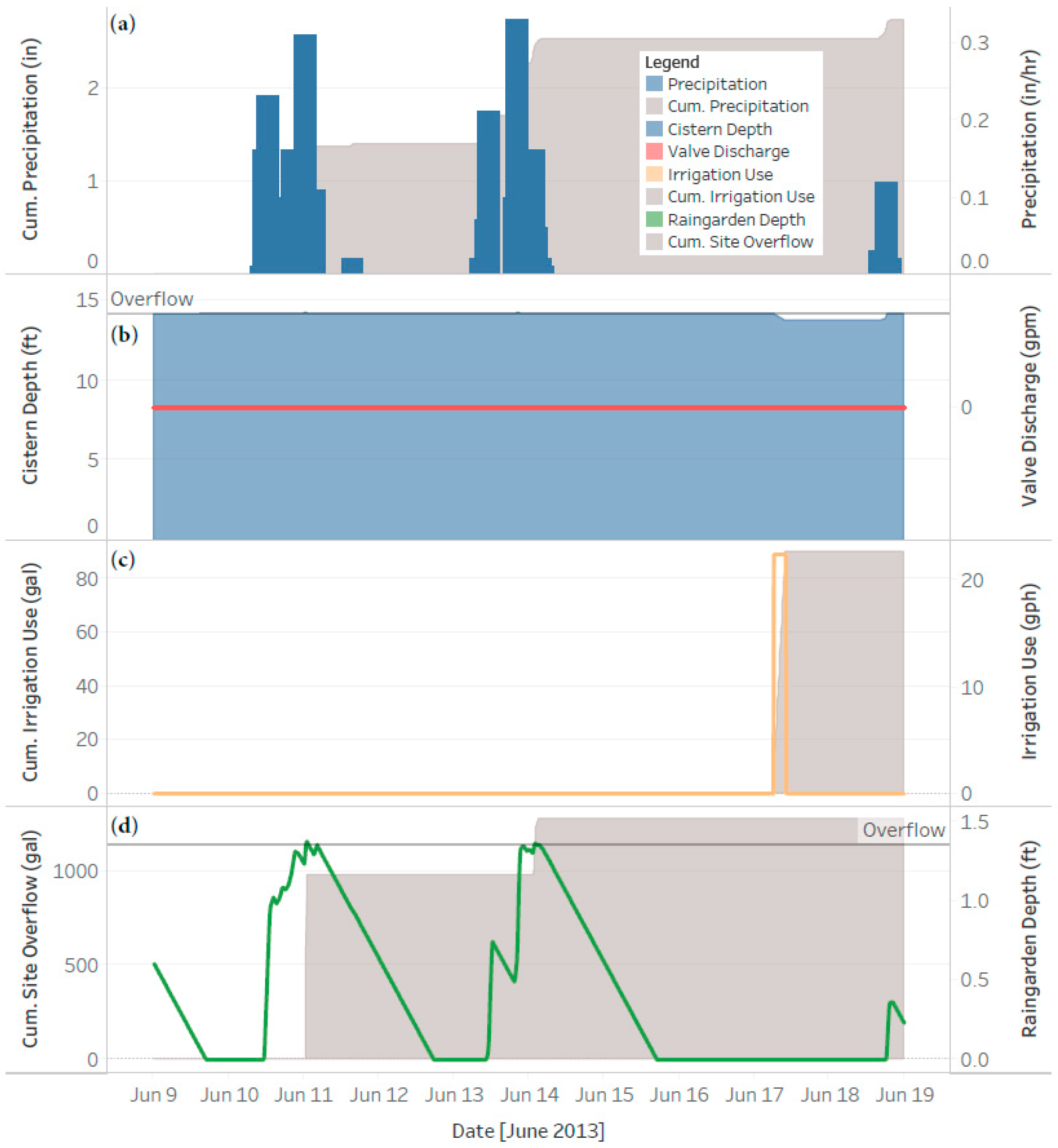
3.2. Event-Specific Results
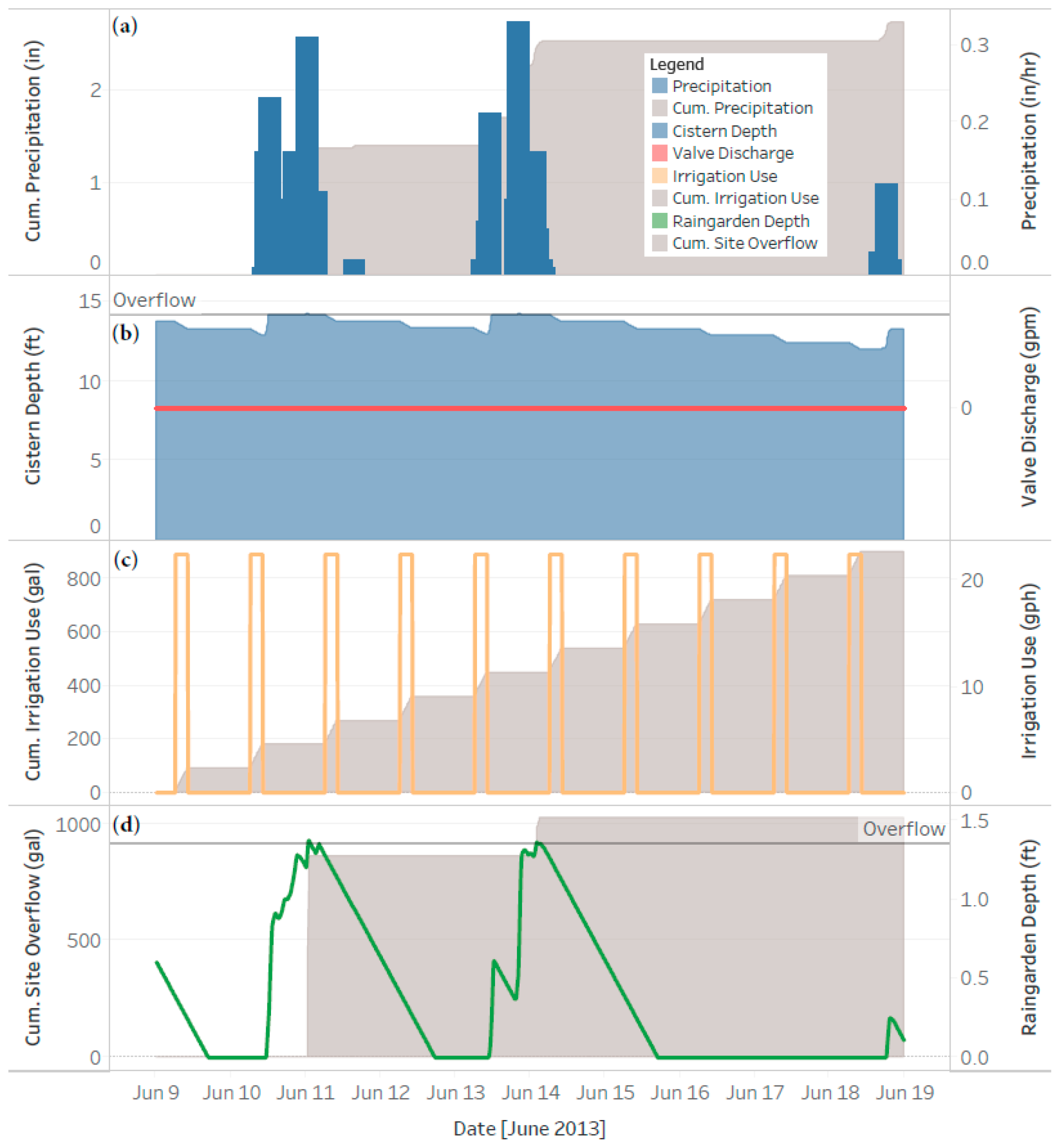
- Timed Scenario: The cistern’s water level decreased daily from scheduled irrigation; however, the raingarden overflowed to the site outfall during both rainfall events despite beginning each event empty. The Timed Scenario used significantly more harvested rainwater for irrigation than that of the Moisture and Active Scenarios (Figure 3).
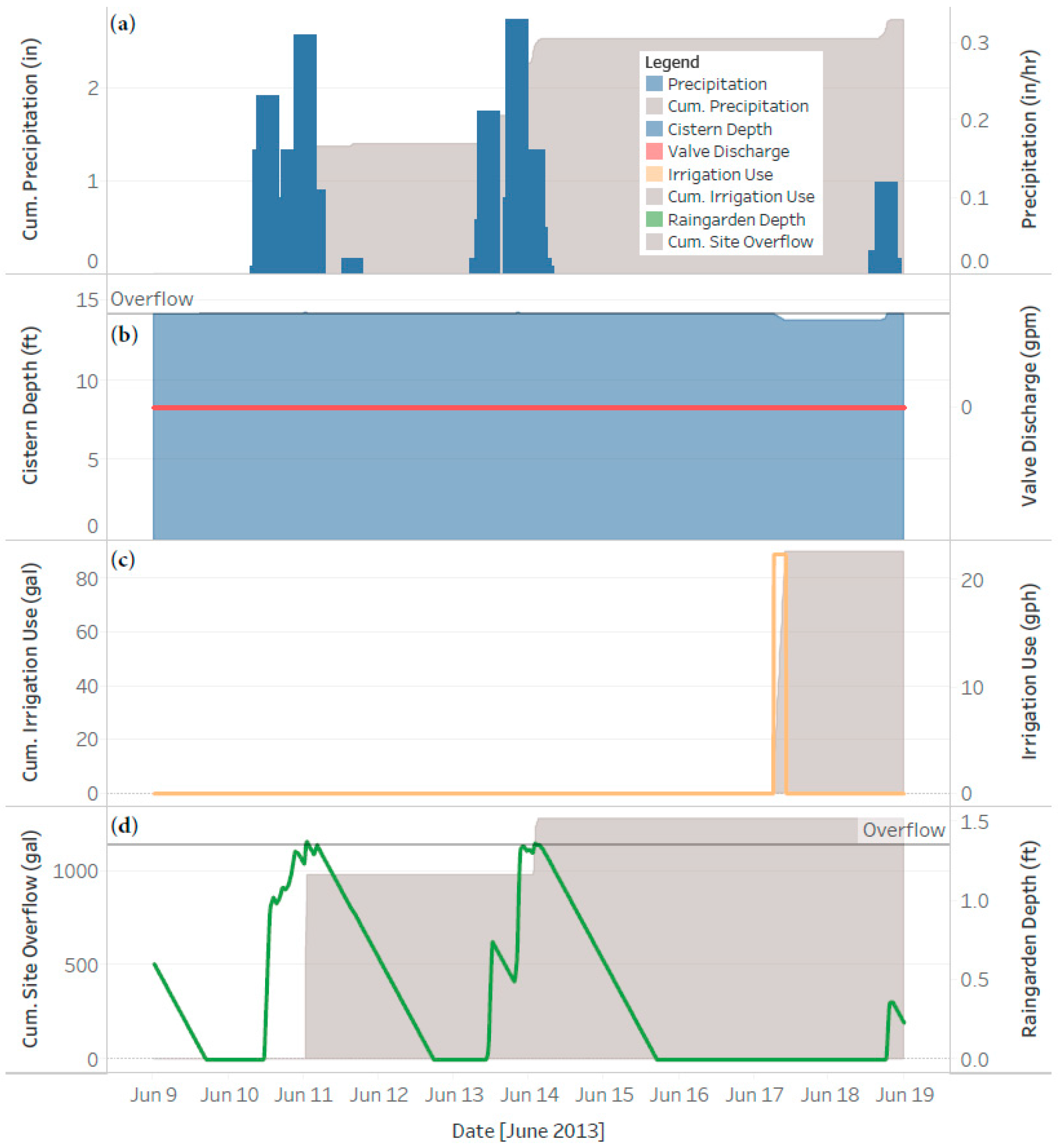
- Moisture Scenario: The cistern’s water level decreased once on 17 June 2013 from moisture based irrigation and overflowed to the raingarden during both rainfall events. The Moisture Scenario resulted in the most cumulative site overflow because water in the cistern was only reduced once for irrigation (Figure 4).
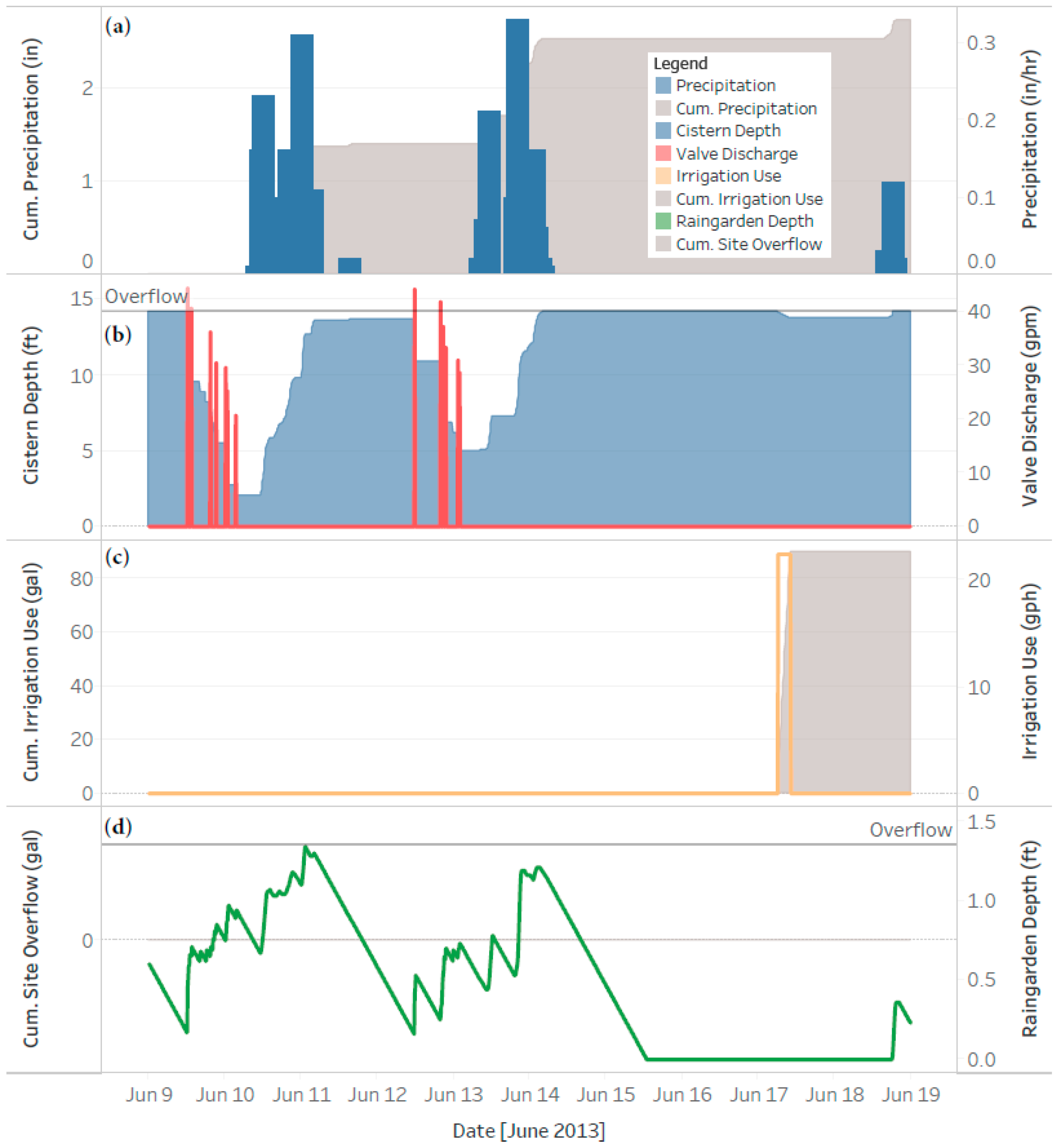
- Active Scenario: The cistern’s water level was effectively managed from 9 June 2013 through 18 June 2013. The cistern was drained in advance of both rainfall events to accommodate expected roof runoff volume; the raingarden did not overflow to the site outfall as a result of either rain event. Additionally, irrigation only occurred once on 17 June 2013 (Figure 5).
3.3. Long-Term Runoff Analysis
3.3.1. Cistern Performance
3.3.2. Site Performance
3.4. Irrigation and Vegetation Health Analysis
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- National Atmospheric and Oceanic Administration. A National Strategy to Restore Coastal and Estuarine Habitat, April 2002. Available online: http://www.era.noaa.gov/pdfs/entire.pdf (accessed on 6 September 2017).
- Jones, M.P.; Hunt, W.F. Performance of Rainwater Harvesting Systems in the Southeastern United States. Resour. Conserv. Recycl. 2009, 54, 623–629. [Google Scholar] [CrossRef]
- Atzori, L.; Iera, A.; Morabito, G. The Internet of things: A Survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Lefkowitz, J.R.; Sarmanian, A.K.; Quigley, M. Continuous Monitoring and Adaptive Control—The Internet of Things Transforms Stormwater Management. J. N. Engl. Water Environ. Assoc. 2016, 50, 44–51. [Google Scholar]
- Quigley, M.Q.; Brown, C. Transforming our Cities: High Performance Green Infrastructure, Water Environment Research Foundation, 2014, Project INFR1R11. Available online: https://www.werf.org/a/ka/Search/ResearchProfile.aspx?ReportId=INFR1R11 (accessed on 3 August 2017).
- Roman, D.C.; Quigley, M. Low Cost Retrofit of Standard Tide Gates to Facilitate Flood Protection and Halt Upstream Land Subsidence. In Proceedings of the StormCon Coastal Protection Symposium, Anaheim, CA, USA, 21–25 August 2011. [Google Scholar]
- Poresky, A.; Boyle, R.; Cadwalader, O. Taking Stormwater Real Time Controls to the Watershed Scale: Evaluating the Business Case and Developing an Implementation Roadmap for an Oregon MS4. In Proceedings of the California Stormwater Quality Association, Monterey, CA, USA, 19–21 October 2015. [Google Scholar]
- Lefkowitz, J. Converting Dry Ponds to Wet Ponds without Excavation: Forecast Based Real Time Outlet Control Offers a Least Cost Retrofit Strategy. In Proceedings of the Water Environment Federation, WEFTEC 2016: Session 210 through Session 219; Water Environment Federation: Alexandria, VA, USA, 2016; pp. 3071–3083. [Google Scholar]
- Kerkez, B.; Gruden, C.; Lewis, M.; Montestruque, L.; Quigley, M.; Wong, B.; Bedig, A.; Kertesz, R.; Braun, T.; Cadwalader, O.; et al. Smarter Stormwater Systems. Environ. Sci. Technol. 2016, 50, 7267–7273. [Google Scholar] [CrossRef] [PubMed]
- New York City Department of Parks. The Construction of Greenstreets and Rain Gardens Designed by Capturing Stormwater in the Borough of the Bronx; File Number 220552603; New York City Department of Buildings: New York, NY, USA, 28 February 2017.
- U.S. Environmental Protection Agency. Stormwater Management Model User’s Manual Version 5.1. 2015. Available online: https://www.epa.gov/water-research/storm-water-management-model-swmm#documents (accessed on 30 May 2017).
- National Climatic Data Center. Hourly Precipitation Records, La Guardia Airport Station 305811. Available online: https://www.ncdc.noaa.gov/cdo-web/datasets (accessed on 16 April 2017).
- U.S. Department of Agriculture—National Resources Conservation Service. Web Soil Survey 1.1 National Cooperative Soil Survey. Available online: http://websoilsurvey.nrcs.usda.gov (accessed on 16 April 2017).
- Northeast Regional Climate Center. Daily Evapotranspiration and Soil Moisture Estimates for the Northeastern United States, NRCC Research Publication RR-94-1. Available online: http://www.nrcc.cornell.edu/wxstation/pet/pet.html (accessed on 16 April 2017).
- Brown, R.N.; Perciavalle, C.; Narkiewicz, S.; DeCuollo, S. Relative Rooting Depths of Native Grasses and Amenity Grasses with Potential for use on Roadsides in New England. HortScience 2010, 45, 393–400. [Google Scholar]
- University of Wisconsin. Irrigation Management in Wisconsin, Publication A3600-01. 2015. Available online: http://fyi.uwex.edu/cropirrigation/files/2015/03/IrrigationManagement.pdf (accessed on 6 May 2017).
- Arizona University College of Agriculture and Life Sciences. Drip Irrigation 101. Available online: https://cals.arizona.edu/backyards/sites/cals.arizona.edu.backyards/files/page16.pdf (accessed on 15 December 2016).
- Poresky, A.; Boyle, R.; Cadwalader, O. Piloting Real Time Control Retrofits of Stormwater Facilities: Two Oregon Case Studies and Beyond. In Proceedings of the Pacific Northwest Clean Water Association, Boise, ID, USA, 26–27 October 2015. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Month | PET (cm/Month) |
|---|---|
| January | 1.14 |
| February | 1.68 |
| March | 3.51 |
| April | 5.89 |
| May | 9.09 |
| June | 10.21 |
| July | 11.20 |
| August | 9.60 |
| September | 6.58 |
| October | 4.04 |
| November | 1.91 |
| December | 1.14 |
| Condition | Volumetric Water Content 1 | Model Process 2 |
|---|---|---|
| Saturation | 46% | PET, Runoff, Infiltration |
| Field Capacity | 30% | PET, Infiltration |
| Permanent Wilt Point | 10% | PET |
| Scenario | Variable | Condition | Action |
|---|---|---|---|
| ---Irrigation Rules--- | |||
| Timed | Month | May through October 1 | Irrigate if all conditions met |
| Cistern Depth | >30.5 cm2 | ||
| Time | 6 am to 10 am | ||
| Moisture | Month | May through October | Irrigate if all conditions met |
| Cistern Depth | >30.5 cm | ||
| Time | 6 am to 10 am | ||
| Soil Moisture | <Allowable Depletion | ||
| Active | Month | May through October | Irrigate if all conditions met |
| Cistern Depth | >30.5 cm | ||
| Time | 6 am to 10 am | ||
| Soil Moisture | <Allowable Depletion | ||
| 24-h Rainfall Forecast 3,4 | None in forecast | ||
| ---Discharge Valve Control Rules--- | |||
| Timed | Not Applicable | Not Applicable | Not Applicable |
| Moisture | Not Applicable | Not Applicable | Not Applicable |
| Active | Month | May through October | Drain cistern to accommodate predicted runoff volume if all conditions are met |
| 24-h Pred. Runoff Volume 5 | >Available Cistern Storage Volume | ||
| 6-h Rainfall Forecast 6 | None in forecast | ||
| Past 12-h of Rainfall 7 | <0.25 cm | ||
| Variable | Base Scenario | Timed Scenario | Moisture Scenario | Active Scenario |
|---|---|---|---|---|
| Roof Runoff (m3) | 172 | 172 | 172 | 172 |
| Cistern Overflow (m3) | - | 105 | 148 | 43 |
| Controlled Discharge (m3) | - | 0 | 0 | 111 |
| Cistern Capture (%) | - | 41.3 | 14.8 | 76.6 |
| Variable | Base Scenario | Timed Scenario | Moisture Scenario | Active Scenario |
|---|---|---|---|---|
| Total Runoff 1 (m3) | 550 | 550 | 550 | 550 |
| Site Overflow (m3) | 550 | 208 | 222 | 178 |
| Site Capture (%) | - | 64.6 | 61.9 | 69.8 |
| Variable | Timed Scenario | Moisture Scenario | Active Scenario |
|---|---|---|---|
| Cistern Storage (% Full) | 74 | 90 | 82 |
| Irrigation Use (m3) | 59 | 13 | 11 |
| Cistern Empty (days) | 9.2 | 3.4 | 6.4 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roman, D.; Braga, A.; Shetty, N.; Culligan, P. Design and Modeling of an Adaptively Controlled Rainwater Harvesting System. Water 2017, 9, 974. https://doi.org/10.3390/w9120974
Roman D, Braga A, Shetty N, Culligan P. Design and Modeling of an Adaptively Controlled Rainwater Harvesting System. Water. 2017; 9(12):974. https://doi.org/10.3390/w9120974
Chicago/Turabian StyleRoman, David, Andrea Braga, Nandan Shetty, and Patricia Culligan. 2017. "Design and Modeling of an Adaptively Controlled Rainwater Harvesting System" Water 9, no. 12: 974. https://doi.org/10.3390/w9120974
APA StyleRoman, D., Braga, A., Shetty, N., & Culligan, P. (2017). Design and Modeling of an Adaptively Controlled Rainwater Harvesting System. Water, 9(12), 974. https://doi.org/10.3390/w9120974