
Soil Modeling and Prediction Methods in Dredging Construction Areas


Abstract
1. Introduction
2. Materials and Methods
2.1. Geological Survey Report and Format Data Processing
2.1.1. Geological Survey Report Data Processing
2.1.2. Reading MDB Format Data
2.2. Prediction of Soil Conditions
2.2.1. Voronoi Diagram Division of the Drilling Area
2.2.2. Point Cloud Plane Resampling Method
2.2.3. Three-Dimensional Model Contour Generation Method
2.2.4. Calculation of the Earthwork Volume Difference
2.2.5. Batch Prediction of Soil Conditions at Point Locations
3. Results and Discussion
- (1)
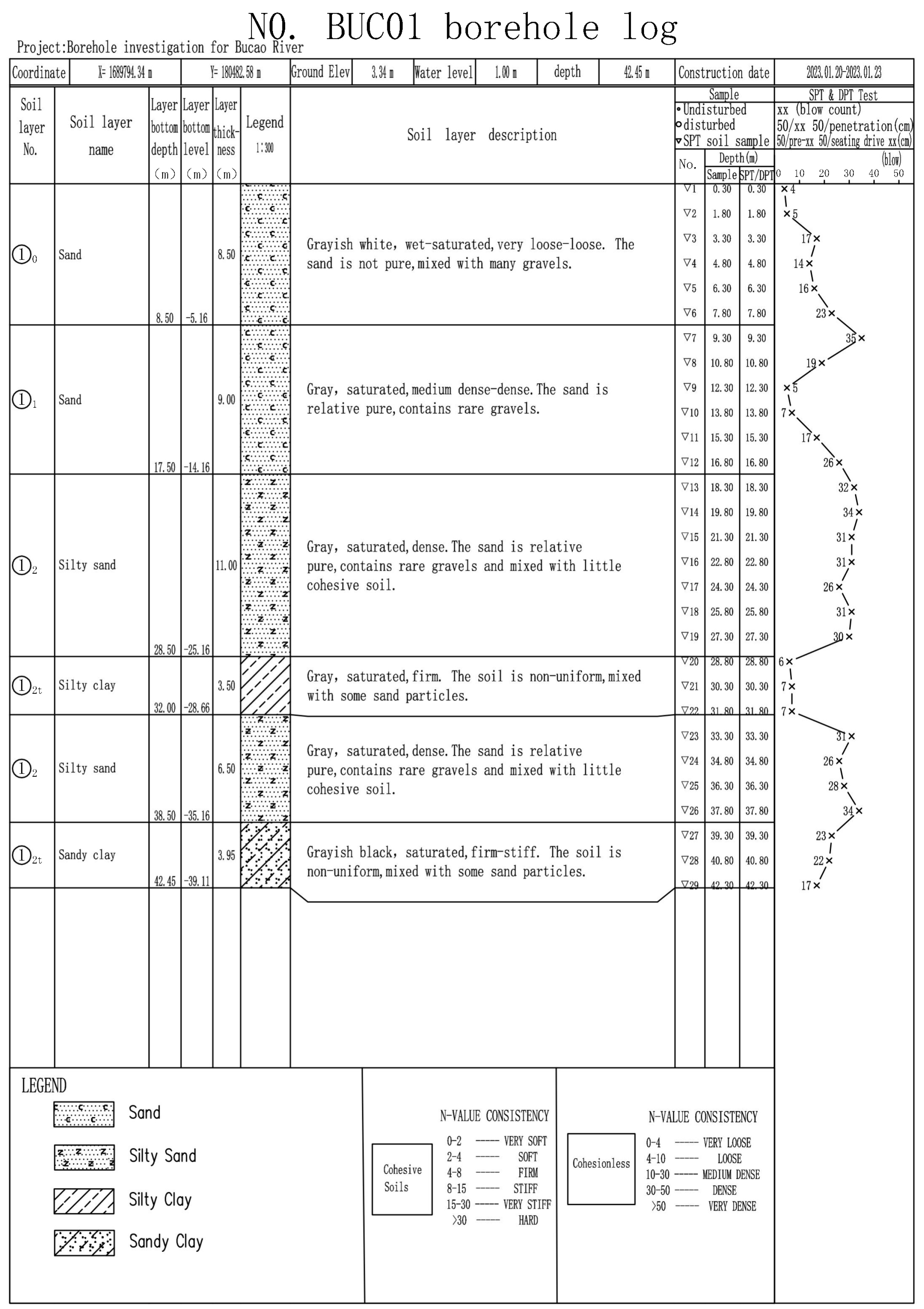
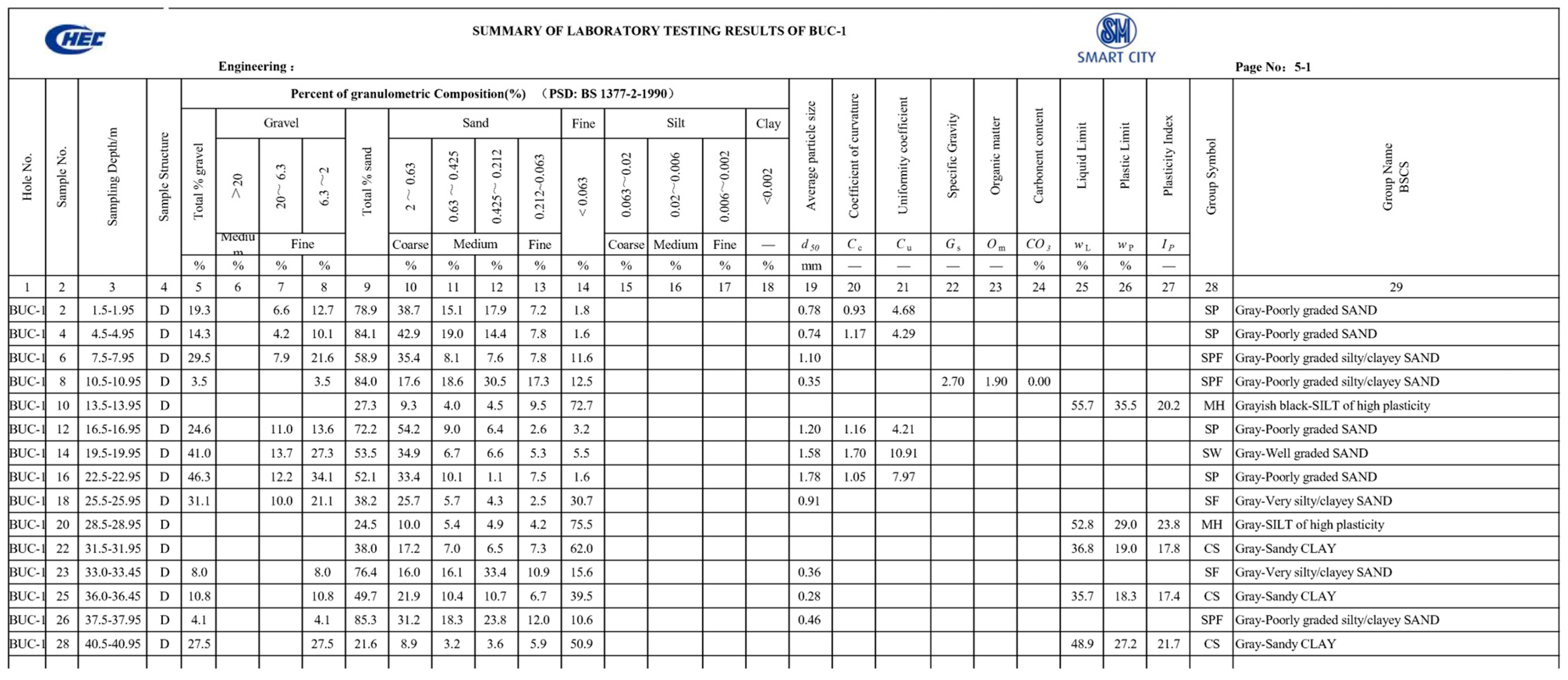
- Firstly, this paper classifies the boreholes and the corresponding soil data in the geological prospecting report and processes them according to the corresponding soil classification standards (Part II). Data processing and analysis are carried out using geological prospecting software, which provides basic data for subsequent analysis. Since the data are divided according to the classification standard, they have a certain accuracy. However, some soil data with incomplete information and the influence of the screening method on sand particle size parameters [20] often cause some deviations in the determination of soil type, which is greatly interfered with by human factors. Moreover, it can be seen from Figure 2 that discontinuity exists between each sample depth; it is extremely important to control the information of the sample under missing depth. In this paper, the maximum depth of the previous sample depth interval and the minimum depth of the next sample depth interval are adopted as the dividing line, and an average of the two is taken as the dividing line. The unknown soil layer information on both sides of the boundary line is divided into the known soil layer data on the upper and lower samples. Therefore, the accuracy of the data partitioning method needs to be studied.
- (2)
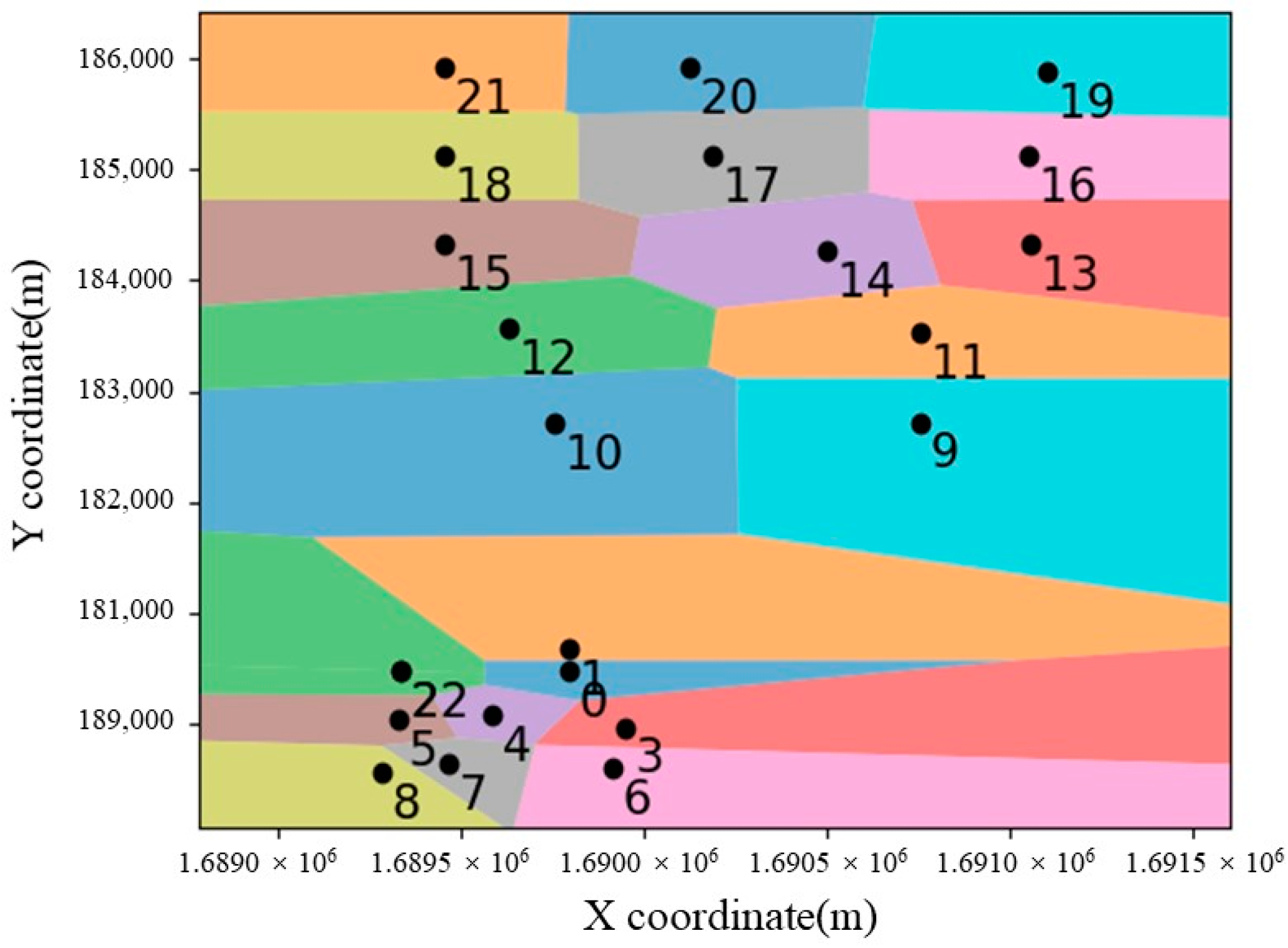
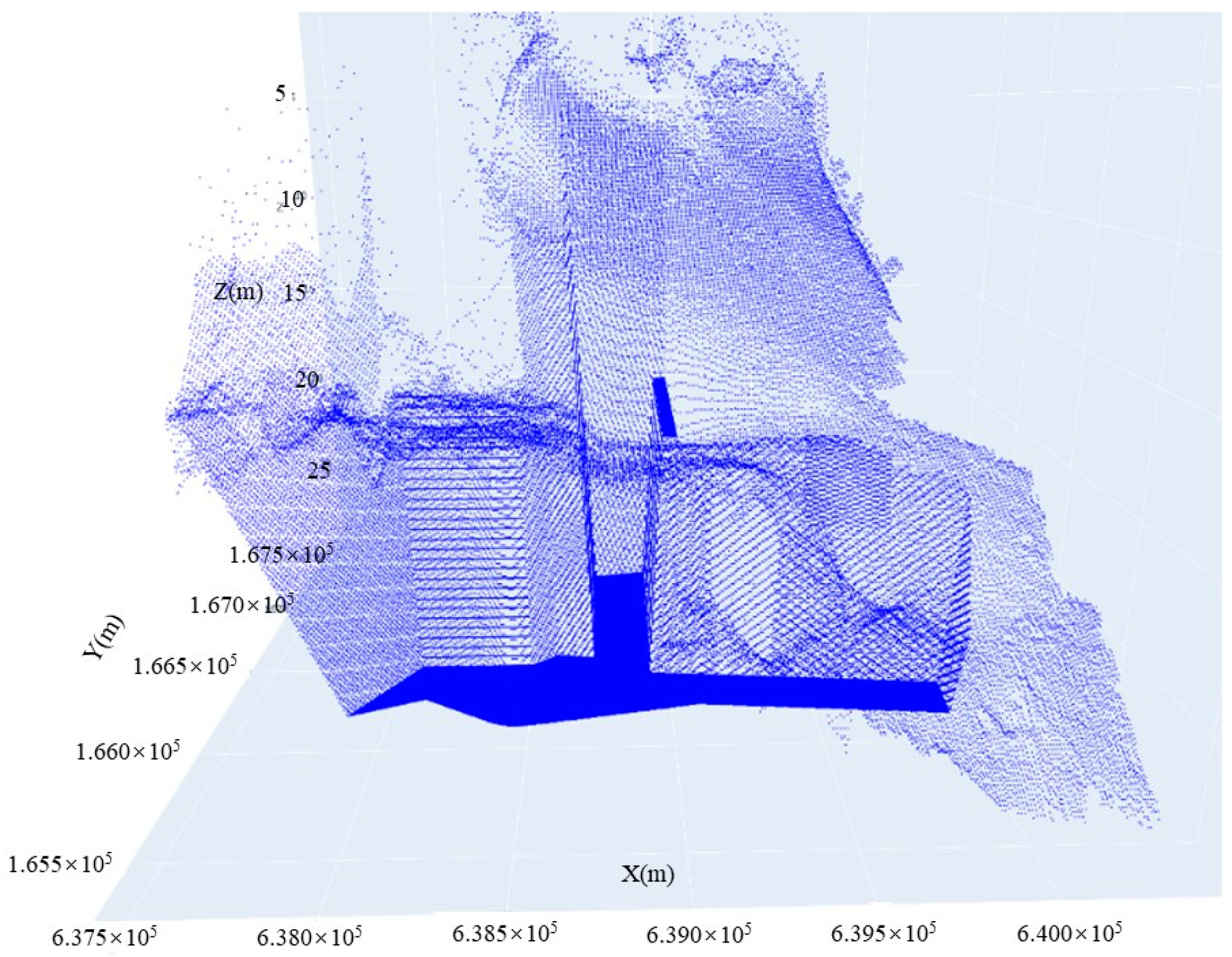
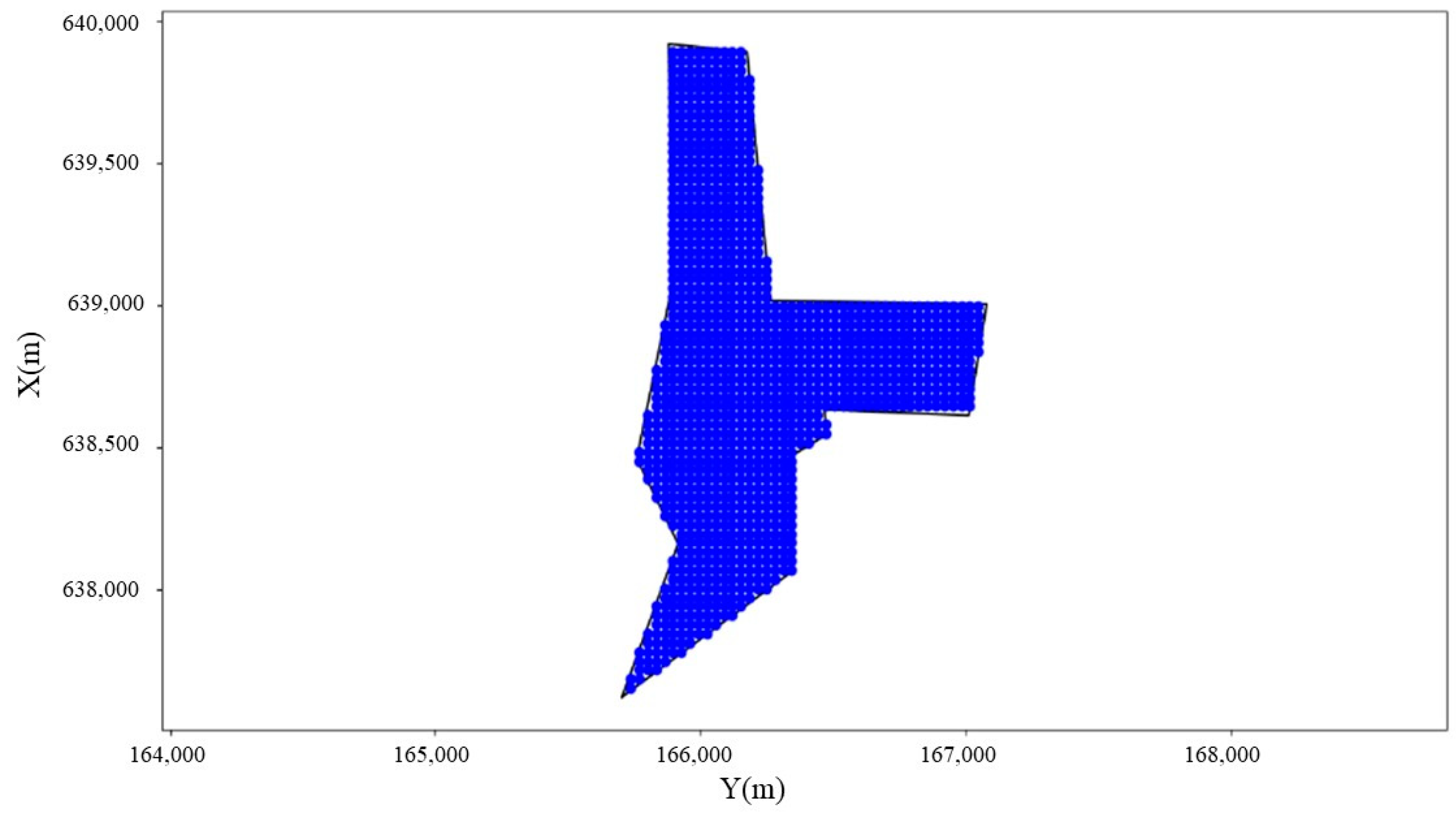
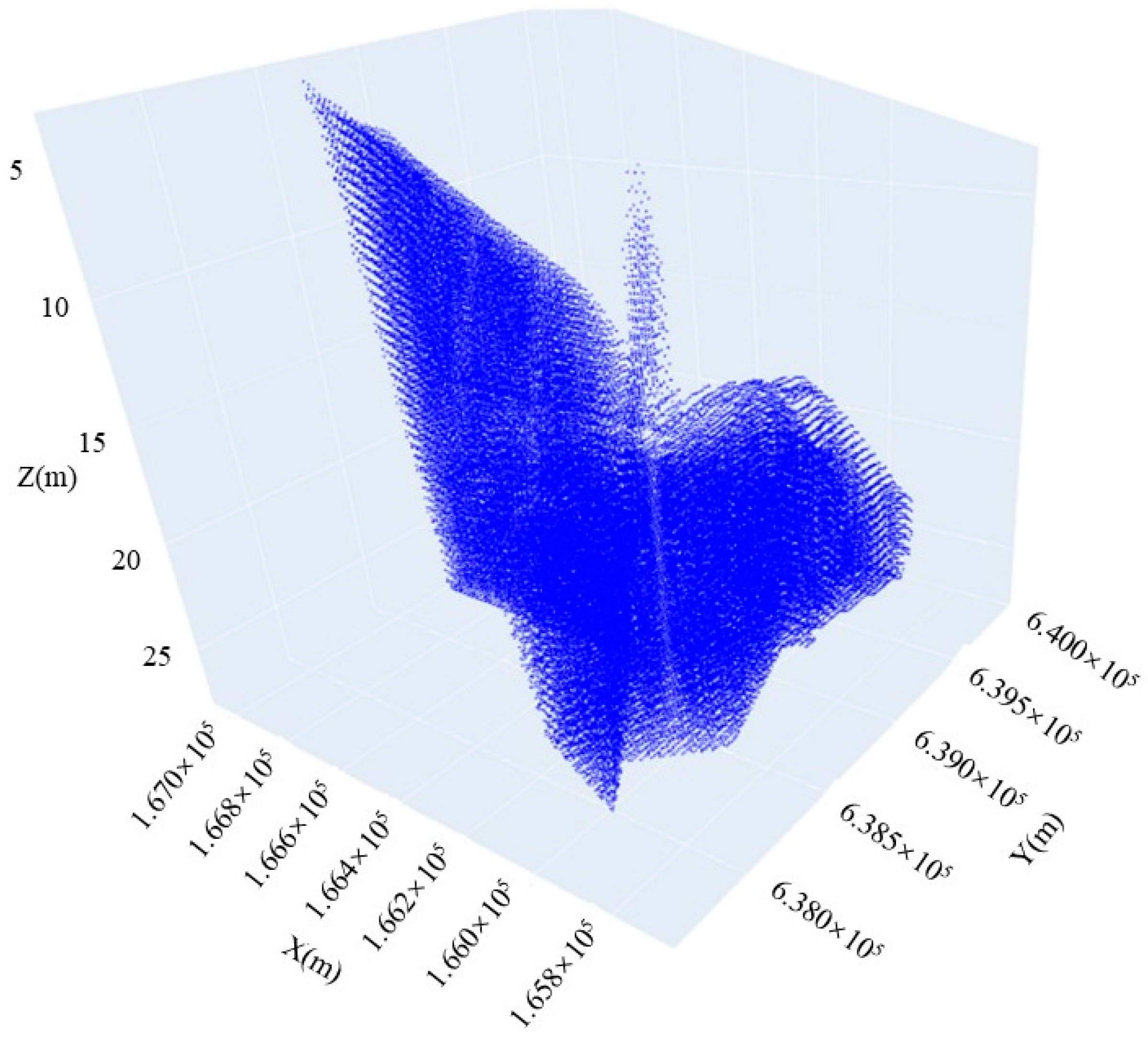
- The planar division of the borehole area is determined using the Voronoi diagram partitioning algorithm (Section 1 of Part III); the high recognition accuracy of the soil state estimation algorithm (more than 95%) is verified using the test dataset, which shows the potential of the algorithm in practical applications. Although the Voronoi diagram partitioning algorithm can achieve a high recognition accuracy, the construction and computation of Voronoi diagrams are still quite complex, especially for large-scale datasets. The order of magnitude of the point cloud model starts from 1 × 105, and the calculation degree is quite complex.
- (3)
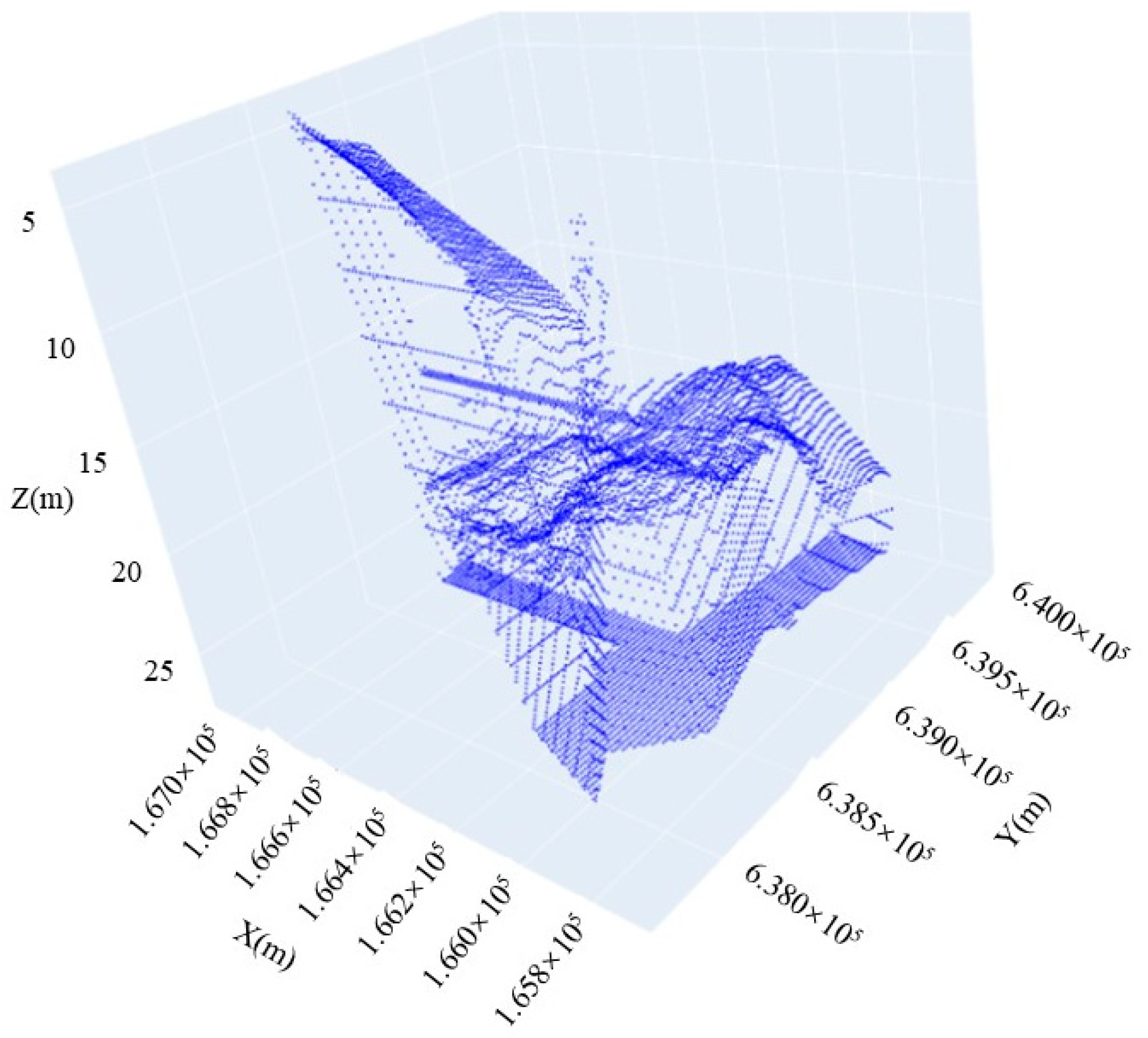
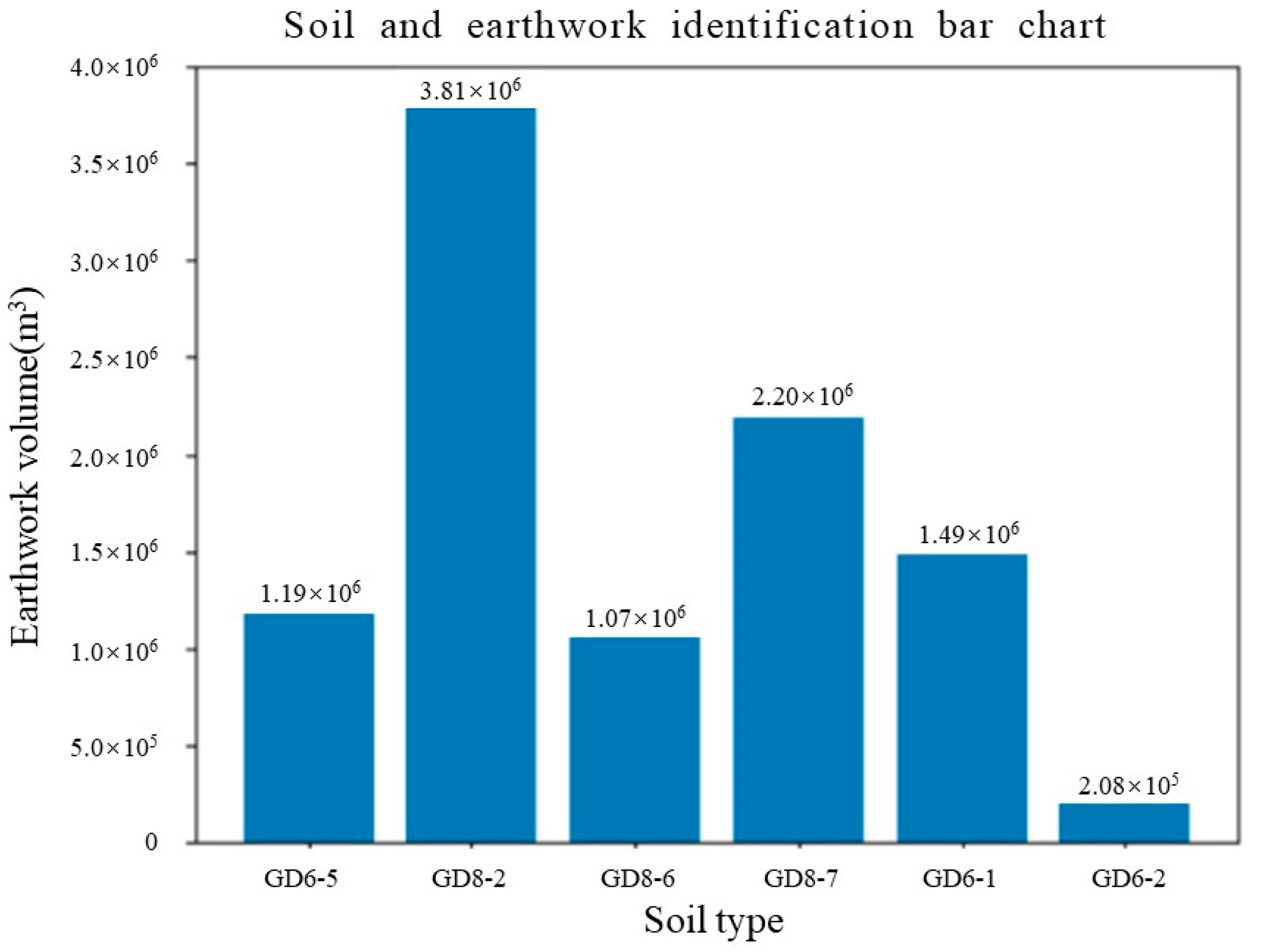
- The geological prediction model of a 3D point cloud in dredging construction areas is established by calculating the difference in earthwork quantity. The model is based on the grid size after the convergence of the calculation of earthwork difference, which can ensure the reliability of the earthwork calculation. The grid result is based on the two converging results and must meet the requirement that with the change in grid size, the overall change amplitude of earthwork volume is less than 0.1%, and the change amplitude of excavation and fill volume is less than 0.05% (Section 4 of Part III). Therefore, the calculation result of the earthwork is reliable. With the progress of the dredging construction process, the obtained soil is mixed with various types of soil, such as silt and yarn, and their separation often requires elevated costs; therefore, in the actual construction process, accurately obtaining the amount of soil of the various different soil types is extremely difficult. Therefore, at present, only the collected point cloud data are missing the actual data of various types of soil volume, and it is difficult to compare the predicted results with the actual results to verify their accuracy.
- (4)
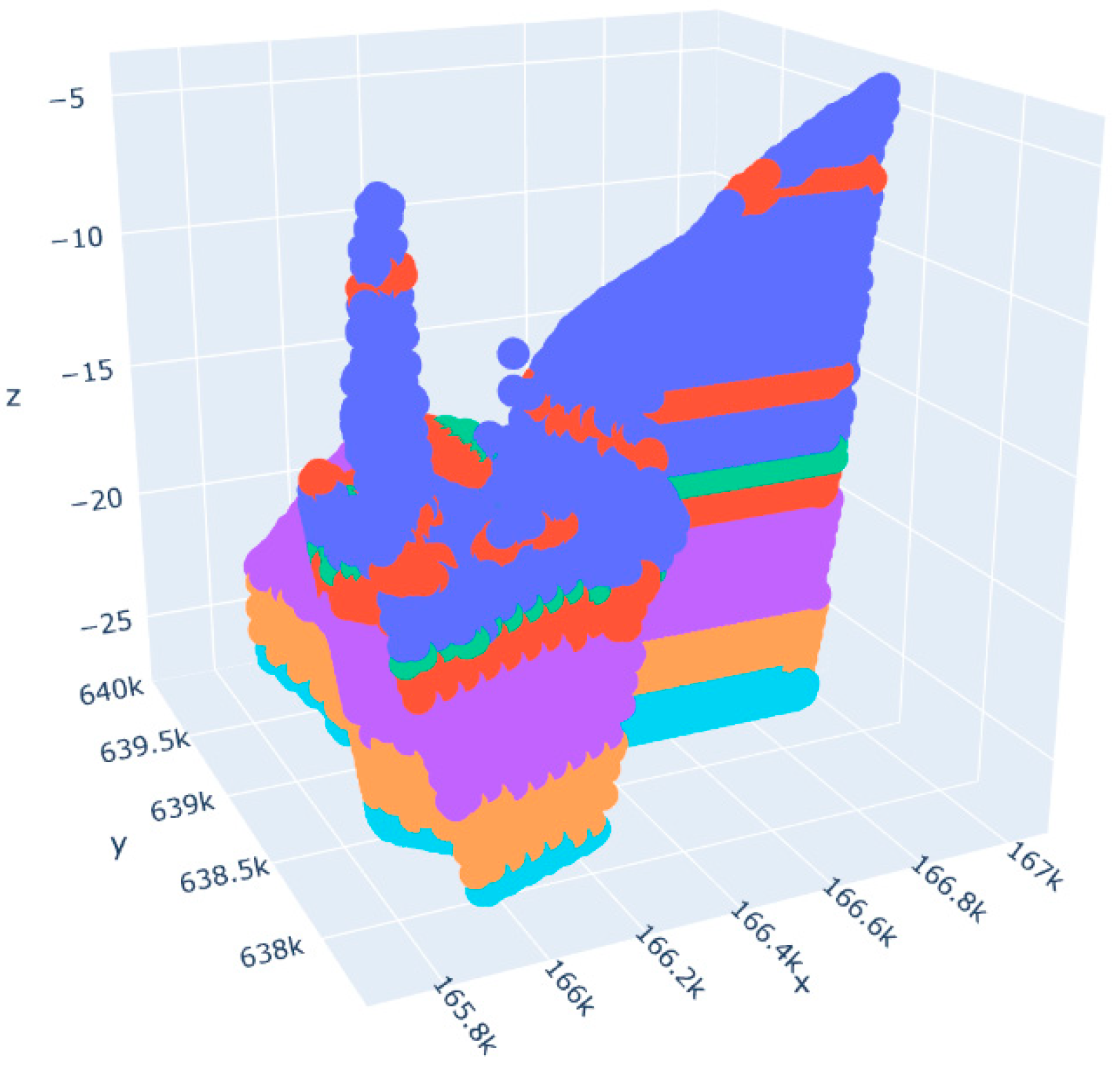
- This paper presents an innovative method for modeling and forecasting soil quality in dredging construction areas. By combining 3D point cloud models with borehole data, the soil quality and the amount of soil in each part of the model can be predicted quickly and accurately. The method has a strong generalization ability; to identify the soil quality and the volume of the construction area, only the point cloud contour data and a series of point depth soil data in the construction area need to be provided.
- (5)
- There are five types of input data in this paper, including mud surface line data, dredging depth data, point cloud data, borehole data, and formation data, which come from the Borehole Factual Report of Bucao River provided by CCCC Guangzhou Waterway Bureau Co., LTD. In order to improve the accuracy of the model, the boundary feature points of the 3D point cloud plane are used to reduce the generation of invalid triangulation networks. Taking the initial mesh size as the starting point, the new mesh size = original mesh size *1/2 speed convergence is used to control the accuracy of the model, and the soil and its earthwork volume are finally predicted. In this paper, a point cloud model is adopted to control various types of earth quantities. The idea comes from the division of the grid in computer fluid mechanics, and a geometric parameter of the grid is controlled by artificially controlling the distance between each node, so as to effectively count the earth quantity of various types of soil.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Soliwoda, J.; Kaizer, A.; Neumann, T. Possibility of Capsizing of a Dredger during Towing. Water 2021, 13, 3027. [Google Scholar] [CrossRef]
- Smith, E.R.; D’Alessandro, F.; Tomasicchio, G.R.; Gailani, J.Z. Nearshore placement of a sand dredged mound. Coast. Eng. 2017, 126, 1–10. [Google Scholar] [CrossRef]
- Ghaderi, A.; Shahri, A.A.; Larsson, S. An artificial neural network based model to predict spatial soil type distribution using piezocone penetration test data (CPTu). Bull. Eng. Geol. Environ. 2019, 78, 4579–4588. [Google Scholar] [CrossRef]
- Cao, Z.-J.; Zheng, S.; Li, D.-Q.; Phoon, K.-K. Bayesian Identification of Soil Stratigraphy based on Soil Behaviour Type Index. Can. Geotech. J. 2019, 56, 570–586. [Google Scholar] [CrossRef]
- Wise, J.; Al Dushaishi, M.F. Prediction of Soil Erosion Using 3D Point Scans and Acoustic Emissions. Water 2024, 16, 1009. [Google Scholar] [CrossRef]
- Zeng, N.; Li, J.; Zhang, Y.; Gao, X.; Luo, L. Scattered Train Bolt Point Cloud Segmentation Based on Hierarchical Multi-Scale Feature Learning. Sensors 2023, 23, 2019. [Google Scholar] [CrossRef] [PubMed]
- Hao, R.; Wei, Z.; He, X.; Zhu, K.; Wang, J.; He, J.; Zhang, L. Multistage Adaptive Point-Growth Network for Dense Point Cloud Completion. Remote Sens. 2022, 14, 5214. [Google Scholar] [CrossRef]
- Urbančič, T.; Grahor, V.; Koler, B. Impact of the Grid Cell Size and Interpolation Methods on Earthwork Volume Calculation. Geod. Vestn. 2015, 59, 231–245. [Google Scholar] [CrossRef]
- Lee, K.; Lee, W.H. Earthwork Volume Calculation, 3D Model Generation, and Comparative Evaluation Using Vertical and High-Oblique Images Acquired by Unmanned Aerial Vehicles. Aerospace 2022, 9, 606. [Google Scholar] [CrossRef]
- Slattery, K.T.; Slattery, D.K.; Peterson, J.P. Road Construction Earthwork Volume Calculation Using Three-Dimensional Laser Scanning. J. Surv. Eng. 2012, 138, 96–99. [Google Scholar] [CrossRef]
- Lee, S.B.; Han, D.; Song, M. Calculation and Comparison of Earthwork Volume Using Unmanned Aerial Vehicle Photogrammetry and Traditional Surveying Method. Sensors Mater. 2022, 34, 4737–4753. [Google Scholar] [CrossRef]
- Wang, K.; Guo, B.; Yan, J. Discussion on Calculation Methods for Different Soil Mass in Dredging Engineering. Yangtze River 2012, 43, 21–23+50. [Google Scholar]
- Duan, M.; Song, X.; Li, Z.; Zhang, X.; Ding, X.; Cui, D. Identifying soil groups and selecting a high-accuracy classification method based on multi-textural features with optimal window sizes using remote sensing images. Ecol. Informatics 2024, 81, 102563. [Google Scholar] [CrossRef]
- Lu, X.; Yan, H. An Algorithm to Generate a Weighted Network Voronoi Diagram Based on Improved PCNN. Appl. Sci. 2022, 12, 6011. [Google Scholar] [CrossRef]
- Dhar, S.; Pal, S.; Bhattacharjee, G.; Pandey, A. A digital geometric approach for discrete Voronoi diagram construction using GPU. Concurr. Comput. Pr. Exp. 2024, 36, e8018. [Google Scholar] [CrossRef]
- Nielsen, F. On Voronoi Diagrams on the Information-Geometric Cauchy Manifolds. Entropy 2020, 22, 713. [Google Scholar] [CrossRef] [PubMed]
- Elshakhs, Y.S.; Deliparaschos, K.M.; Charalambous, T.; Oliva, G.; Zolotas, A. A Comprehensive Survey on Delaunay Triangulation: Applications, Algorithms, and Implementations Over CPUs, GPUs, and FPGAs. IEEE Access 2024, 12, 12562–12585. [Google Scholar] [CrossRef]
- Lu, X.; Lin, H. Improved quantum supersampling for quantum ray tracing. Quantum Inf. Process. 2023, 22, 359. [Google Scholar] [CrossRef]
- Bereczky, N.; Duch, A.; Németh, K.; Roura, S. Quad-kd trees: A general framework for kd trees and quad trees. Theor. Comput. Sci. 2016, 616, 126–140. [Google Scholar] [CrossRef]
- Poullet, P.; Muñoz-Perez, J.J.; Poortvliet, G.; Mera, J.; Contreras, A.; Lopez, P. Influence of Different Sieving Methods on Estimation of Sand Size Parameters. Water 2019, 11, 879. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geotechnical Category | Level | Natural Gravity (kN/m3) | Dmf (mm) | SPT-N | Shear Strength (τ kpa) |
|---|---|---|---|---|---|
| Organic soil, peat, and silt | 1 | γ < 16.6 | |||
| Muddy soil type | 2 | γ ≤ 17.6 | N ≤ 4 | τ ≤ 25 | |
| Cohesive soil | 3 | γ ≤ 18.7 | N ≤ 8 | τ ≤ 50 | |
| 4 | γ ≤ 19.5 | N ≤ 15 | 50 < τ ≤ 100 | ||
| 5–1 | γ > 19.5 | N ≤ 30 | τ > 100 | ||
| 5–2 | γ > 19.5 | N > 30 | τ > 100 | ||
| Clay interbedded with sand | 5–3 | N ≤ 30 | |||
| 5–4 | N ≤ 50 | ||||
| 5–5 | N ≤100 | ||||
| 5–6 | N > 100 | ||||
| Fine sand | 6–1 | γ ≤ 18.6 | <0.105 | N ≤ 10 | |
| 6–2 | N ≤ 30 | ||||
| 6–3 | N ≤ 50 | ||||
| 6–4 | N > 50 | ||||
| 6–5 | <0.150 | N ≤ 10 | |||
| 6–6 | N ≤ 30 | ||||
| 6–7 | N ≤ 50 | ||||
| 6–8 | N > 50 | ||||
| Medium sand | 7–1 | γ ≤ 19.6 | <0.210 | N ≤ 10 | |
| 7–2 | N ≤ 30 | ||||
| 7–3 | N ≤ 50 | ||||
| 7–4 | N > 50 | ||||
| 7–5 | <0.300 | N ≤ 10 | |||
| 7–6 | N ≤ 30 | ||||
| 7–7 | N ≤ 50 | ||||
| 7–8 | N > 50 | ||||
| Coarse sand | 8–1 | γ > 19.6 | <0.420 | N ≤ 10 | |
| 8–2 | N ≤ 30 | ||||
| 8–3 | N ≤ 50 | ||||
| 8–4 | N > 50 | ||||
| 8–5 | <2.000 | N≤ 10 | |||
| 8–6 | N ≤ 30 | ||||
| 8–7 | N ≤ 50 | ||||
| 8–8 | N > 50 | ||||
| Geotechnical category | Level | Number of heavy hits (N63.5) | Density judgment (DG) | SPT-N | Compressive strength (Mpa) |
| Fragmented soil and rock | 9 | N63.5 ≤ 20 | DG ≤ 70 | ||
| 10 | N63.5 > 20 | DG > 70 | |||
| Rock and soil | 11 | <50 | 0.6~1 | ||
| 12 | 1~5 | ||||
| 13 | >50 | 5~25 | |||
| 14 | 25~50 | ||||
| 15 | >50 |
| Exploration Site Number | Exploration Point Coordinates X (m) | Exploration Point Coordinates Y (m) | Orifice Elevation (m) | Exploration Depth (m) | Exploration Start Date | Exploration Termination Date | Whether to Participate |
|---|---|---|---|---|---|---|---|
| zk1 | 1,689,794.34 | 180,482.58 | 3.34 | 42.45 | 20 January 2023 | 23 January 2023 | Yes |
| zk2 | 1,689,576.82 | 180,680.28 | 4.08 | 51.45 | 24 January 2023 | 27 January 2023 | Yes |
| zk3 | 1,689,330.91 | 180,482.81 | 2.72 | 51.45 | 28 January 2023 | 30 January 2023 | Yes |
| zk4 | 1,689,947.16 | 179,978.55 | 0.98 | 51.45 | 31 January 2023 | 1 February 2023 | Yes |
| zk5 | 1,689,583.86 | 180,093.68 | 2.04 | 45.45 | 13 January 2023 | 15 January 2023 | Yes |
| zk6 | 1,689,325.16 | 180,047.06 | 1.56 | 42 | 9 January 2023 | 9 January 2023 | Yes |
| zk7 | 1,689,913.92 | 179,616.11 | 0.79 | 50.45 | 4 February 2023 | 5 February 2023 | Yes |
| zk8 | 1,689,461.04 | 179,652.05 | 1.49 | 50.95 | 13 January 2023 | 15 January 2023 | Yes |
| zk9 | 1,689,281.96 | 179,570.8 | 1.02 | 50.55 | 11 January 2023 | 12 January 2023 | Yes |
| zk10 | 1,690,751.09 | 182,724.21 | 11.8 | 42.5 | 7 February 2023 | 9 February 2023 | Yes |
| zk11 | 1,689,751.72 | 182,720.57 | 11.58 | 40.45 | 11 February 2023 | 12 February 2023 | Yes |
| zk12 | 1,690,752.85 | 183,523.34 | 15.76 | 40.45 | 12 February 2023 | 13 February 2023 | Yes |
| zk13 | 1,689,626.82 | 183,570.66 | 13.99 | 36.45 | 9 February 2023 | 10 February 2023 | Yes |
| zk14 | 1,691,053.05 | 184,323.24 | 18.22 | 40.45 | 14 February 2023 | 15 February 2023 | Yes |
| zk15 | 1,690,496.08 | 184,266.04 | 17.32 | 40.45 | 15 February 2023 | 16 February 2023 | Yes |
| zk16 | 1,689,452.8 | 184,323.19 | 17.4 | 40.45 | 11 February 2023 | 12 February 2023 | Yes |
| zk17 | 1,691,046.4 | 185,123.28 | 20.72 | 40.45 | 16 February 2023 | 17 February 2023 | Yes |
| zk18 | 1,690,183.66 | 185,124.57 | 20.14 | 40.45 | 17 February 2023 | 18 February 2023 | Yes |
| zk19 | 1,689,453.05 | 185,123.31 | 20.83 | 40.45 | 12 February 2023 | 13 February 2023 | Yes |
| zk20 | 1,691,100.31 | 185,875.81 | 23.43 | 40.45 | 18 February 2023 | 19 February 2023 | Yes |
| zk21 | 1,690,120.36 | 185,916.61 | 23.83 | 40.45 | 15 February 2023 | 16 February 2023 | Yes |
| zk22 | 1,689,452.84 | 185,923.2 | 24.2 | 40.45 | 14 February 2023 | 15 February 2023 | Yes |
| Main Layer Number | Sub-Layer Number | Bottom Depth (m) | Stratum Thickness (m) | Name of Rock and Soil | Geotechnical Category |
|---|---|---|---|---|---|
| 1 | 1 | 1.95 | 1.95 | GD8-5 | 20 January 2023 |
| 1 | 2 | 16.95 | 15 | GD8-6 | 24 January 2023 |
| 2 | 1 | 22.95 | 6 | GD10 | 28 January 2023 |
| 3 | 1 | 25.95 | 3 | GD8-7 | 31 January 2023 |
| 4 | 1 | 28.95 | 3 | GD6-5 | 13 January 2023 |
| 5 | 1 | 30.45 | 1.5 | GD7-5 | 9 January 2023 |
| 6 | 1 | 33.45 | 3 | GD8-7 | 4 February 2023 |
| 6 | 2 | 36.45 | 3 | GD8-6 | 13 January 2023 |
| 6 | 3 | 37.95 | 1.5 | GD8-7 | 11 January 2023 |
| 6 | 0 | 38.95 | 1 | GD16 | 7 February 2023 |
| Location ID | Depth Top (m) | Depth Base (m) | Legend Code | Geology Code |
|---|---|---|---|---|
| 0 | 0 | 1.95 | 1-1-0 | GD8-5 |
| 0 | 1.95 | 16.95 | 1-2-0 | GD8-6 |
| 0 | 16.95 | 22.95 | 2-1-0 | GD10 |
| 0 | 22.95 | 25.95 | 3-1-0 | GD8-7 |
| 0 | 25.95 | 28.95 | 4-1-0 | GD6-5 |
| 0 | 28.95 | 30.45 | 5-1-0 | GD7-5 |
| 0 | 30.45 | 33.45 | 6-1-0 | GD8-7 |
| 0 | 33.45 | 36.45 | 6-2-0 | GD8-6 |
| 0 | 36.45 | 37.95 | 6-3-0 | GD8-7 |
| 1 | 0 | 6.45 | 1-1-0 | GD8-5 |
| 1 | 6.45 | 18.45 | 1-2-0 | GD8-6 |
| 1 | 18.45 | 24.45 | 1-3-0 | GD8-7 |
| 1 | 24.45 | 27.45 | 2-1-0 | GD6-6 |
| 1 | 27.45 | 28.95 | 2-2-0 | GD6-2 |
| 1 | 28.95 | 30.45 | 3-1-0 | GD7-2 |
| 2 | 0 | 3.45 | 1-1-0 | GD8-5 |
| 2 | 3.45 | 25.95 | 1-2-0 | GD8-6 |
| 2 | 25.95 | 28.95 | 1-3-0 | GD8-7 |
| 2 | 28.95 | 34.95 | 1-4-0 | GD8-6 |
| 2 | 34.95 | 37.95 | 2-1-0 | GD7-7 |
| 2 | 37.95 | 40.95 | 3-1-0 | GD8-6 |
| Index | ZKZBX | ZKZBY | Z | YXMC | Recognition Results |
|---|---|---|---|---|---|
| 3 | 1,689,794.34 | 180,482.58 | −25.11 | GD6-5 | GD6-5 |
| 4 | 1,689,794.34 | 180,482.58 | −26.61 | GD7-5 | GD7-5 |
| 5 | 1,689,794.34 | 180,482.58 | −29.61 | GD8-7 | GD8-7 |
| 6 | 1,689,794.34 | 180,482.58 | −32.61 | GD8-6 | GD8-6 |
| 7 | 1,689,794.34 | 180,680.28 | −13.87 | GD8-6 | GD8-7 |
| 8 | 1,689,794.34 | 180,680.28 | −19.87 | GD8-7 | GD8-7 |
| 9 | 1,689,794.34 | 180,680.28 | −22.87 | GD6-6 | GD6-6 |
| 10 | 1,689,794.34 | 180,680.28 | −24.37 | GD6-2 | GD7-2 |
| 11 | 1,689,330.91 | 180,482.81 | −21.37 | GD8-6 | GD8-6 |
| 12 | 1,689,330.91 | 180,482.81 | −24.37 | GD8-7 | GD8-7 |
| 13 | 1,689,330.91 | 180,482.81 | −30.37 | GD8-6 | GD8-6 |
| 14 | 1,689,330.91 | 180,482.81 | −33.37 | GD7-7 | GD7-7 |
| 15 | 1,689,947.16 | 179,978.55 | −7.97 | GD9 | GD8-6 |
| 16 | 1,689,947.16 | 179,978.55 | −9.47 | GD8-6 | GD8-6 |
| 17 | 1,689,947.16 | 179,978.55 | −12.47 | GD9 | GD9 |
| 18 | 1,689,947.16 | 179,978.55 | −13.97 | GD8-6 | GD8-6 |
| 19 | 1,689,947.16 | 179,978.55 | −16.97 | GD9 | GD9 |
| 20 | 1,689,947.16 | 179,978.55 | −25.97 | GD6-6 | GD6-6 |
| 21 | 1,689,947.16 | 179,978.55 | −31.97 | GD8-6 | GD8-6 |
| 22 | 1,689,947.16 | 179,978.55 | −33.47 | GD8-2 | GD8-2 |
| Grid Size (m) | Filling Volume (m3) | Excavation Volume (m3) | Difference in Earthwork Volume (m3) | Change in Difference (m3) | Rate of Change | Does It Satisfy the Convergence Condition (<1%)? |
|---|---|---|---|---|---|---|
| 256 | 20,745,420.8 | 32,056,934.4 | 11,311,513.6 | No | ||
| 128 | 19,898,368 | 29,815,193.6 | 9,916,825.6 | 1,394,688 | 0.123298088 | No |
| 64 | 20,291,481.6 | 30,236,569.6 | 9,945,088 | 28,262.4 | 0.002849944 | Yes |
| Grid Size (m) | Earthwork Volume (m3) | Rate of Change in Filling Volume | Does It Satisfy the Convergence Condition (<0.5%)? |
|---|---|---|---|
| 64 | 20,291,481.6 | No | |
| 32 | 20,505,036.8 | 0.010524377 | No |
| 16 | 20,417,062.4 | 0.00429038 | Yes |
| Grid Size (m) | Excavation Volume (m3) | Rate of Change in Excavation Volume | Does It Satisfy the Convergence Condition (<0.5%)? |
|---|---|---|---|
| 64 | 30,236,569.6 | No | |
| 32 | 30,493,388.8 | 0.008493662 | No |
| 16 | 30,380,620.8 | 0.003698113 | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Q.; Wang, W.; Yuan, Z.; Wang, Z.; Wei, W.; Jiang, P. Soil Modeling and Prediction Methods in Dredging Construction Areas. Water 2024, 16, 1724. https://doi.org/10.3390/w16121724
Guo Q, Wang W, Yuan Z, Wang Z, Wei W, Jiang P. Soil Modeling and Prediction Methods in Dredging Construction Areas. Water. 2024; 16(12):1724. https://doi.org/10.3390/w16121724
Chicago/Turabian StyleGuo, Qi, Wangming Wang, Zihao Yuan, Zhenjie Wang, Wei Wei, and Pan Jiang. 2024. "Soil Modeling and Prediction Methods in Dredging Construction Areas" Water 16, no. 12: 1724. https://doi.org/10.3390/w16121724
APA StyleGuo, Q., Wang, W., Yuan, Z., Wang, Z., Wei, W., & Jiang, P. (2024). Soil Modeling and Prediction Methods in Dredging Construction Areas. Water, 16(12), 1724. https://doi.org/10.3390/w16121724