
Numerical Analysis of Hydrodynamic Characteristics of Two-Dimensional Submerged Structure in Irregular Waves




Abstract
1. Introduction
2. Basic Method
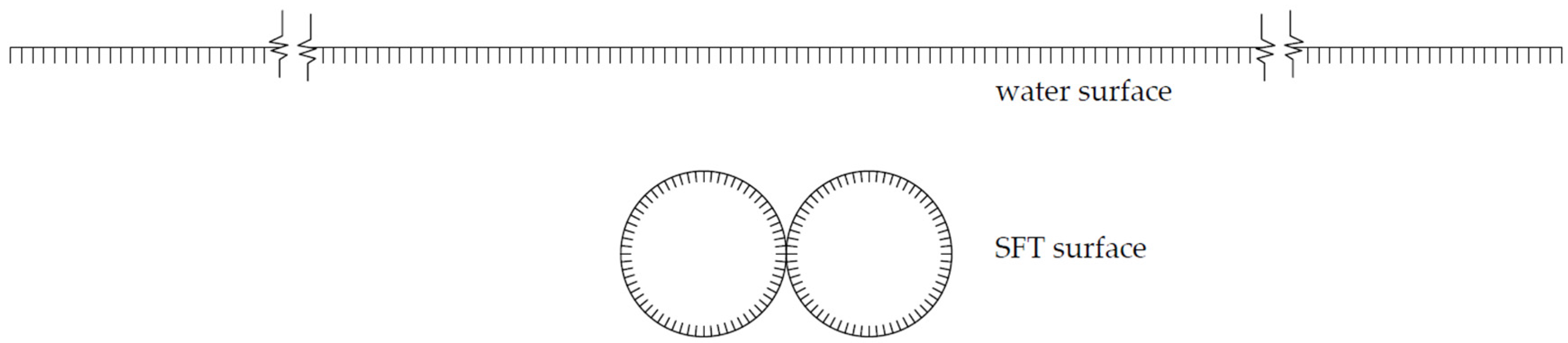
2.1. Wave–SFT–Mooring Interaction Numerical Model
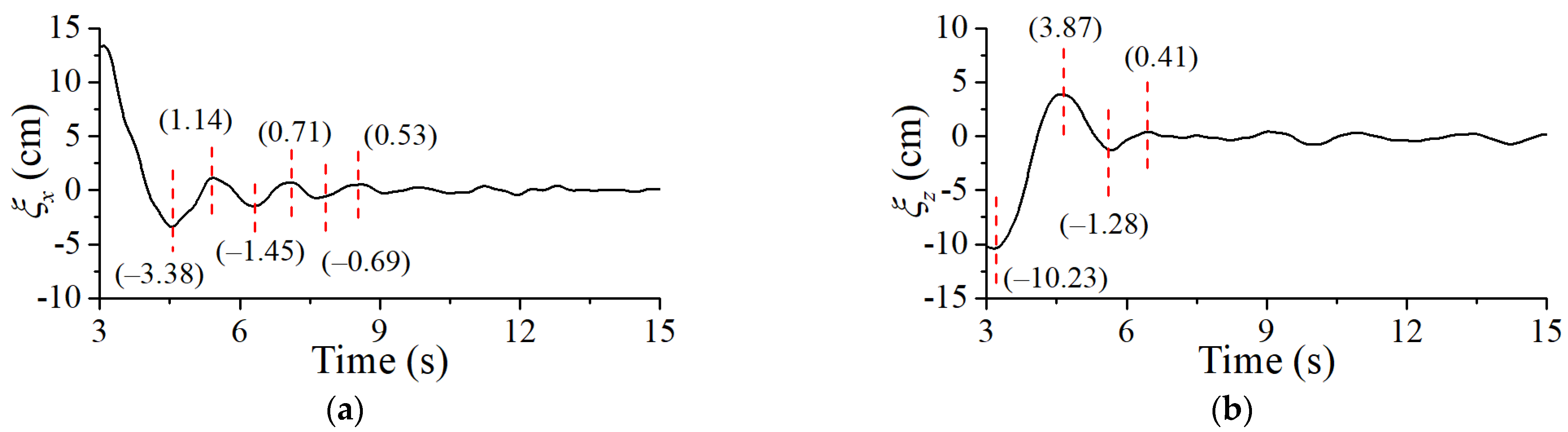
2.2. Damping Coefficient Experiments
3. Calculation and Discussions
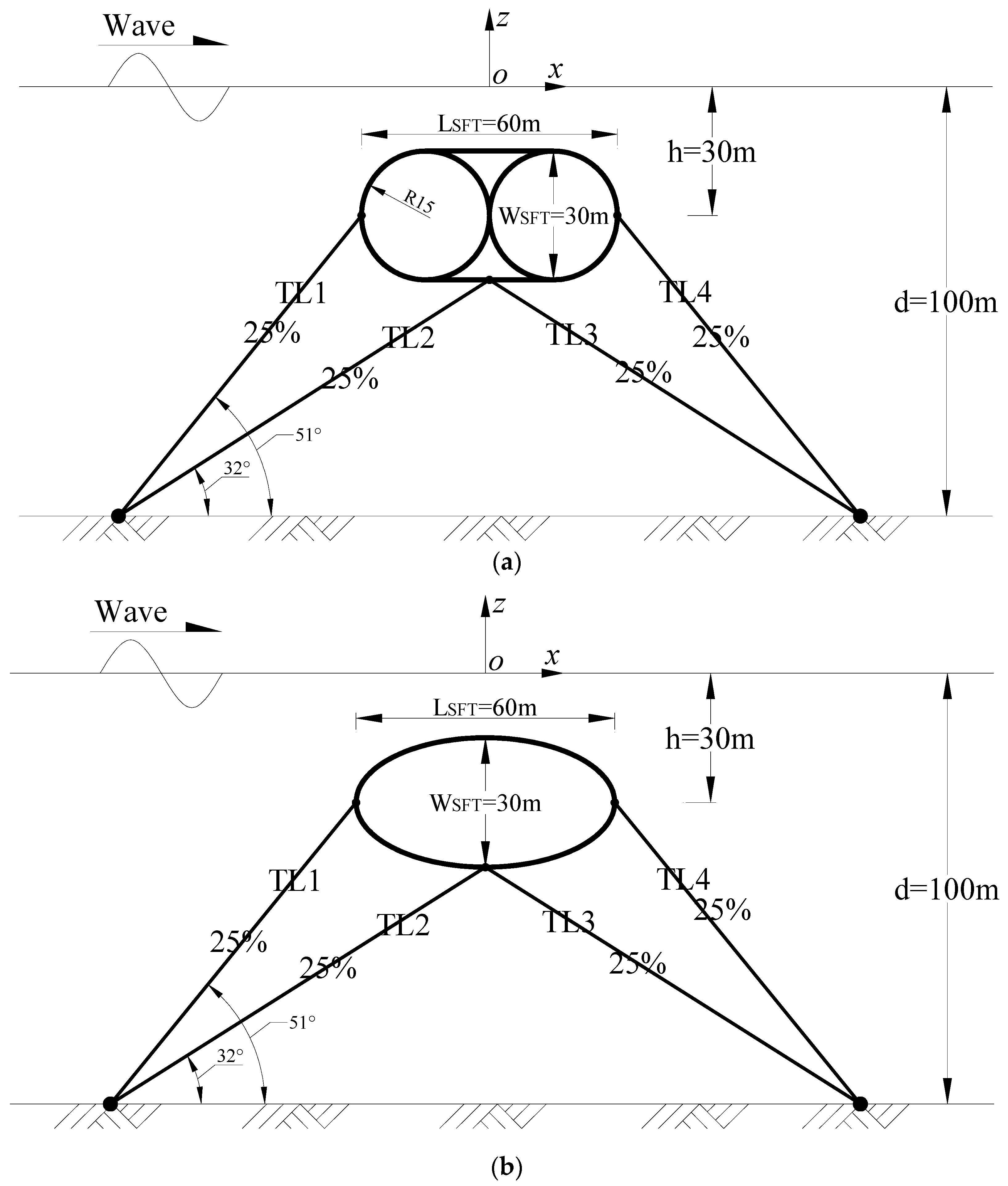
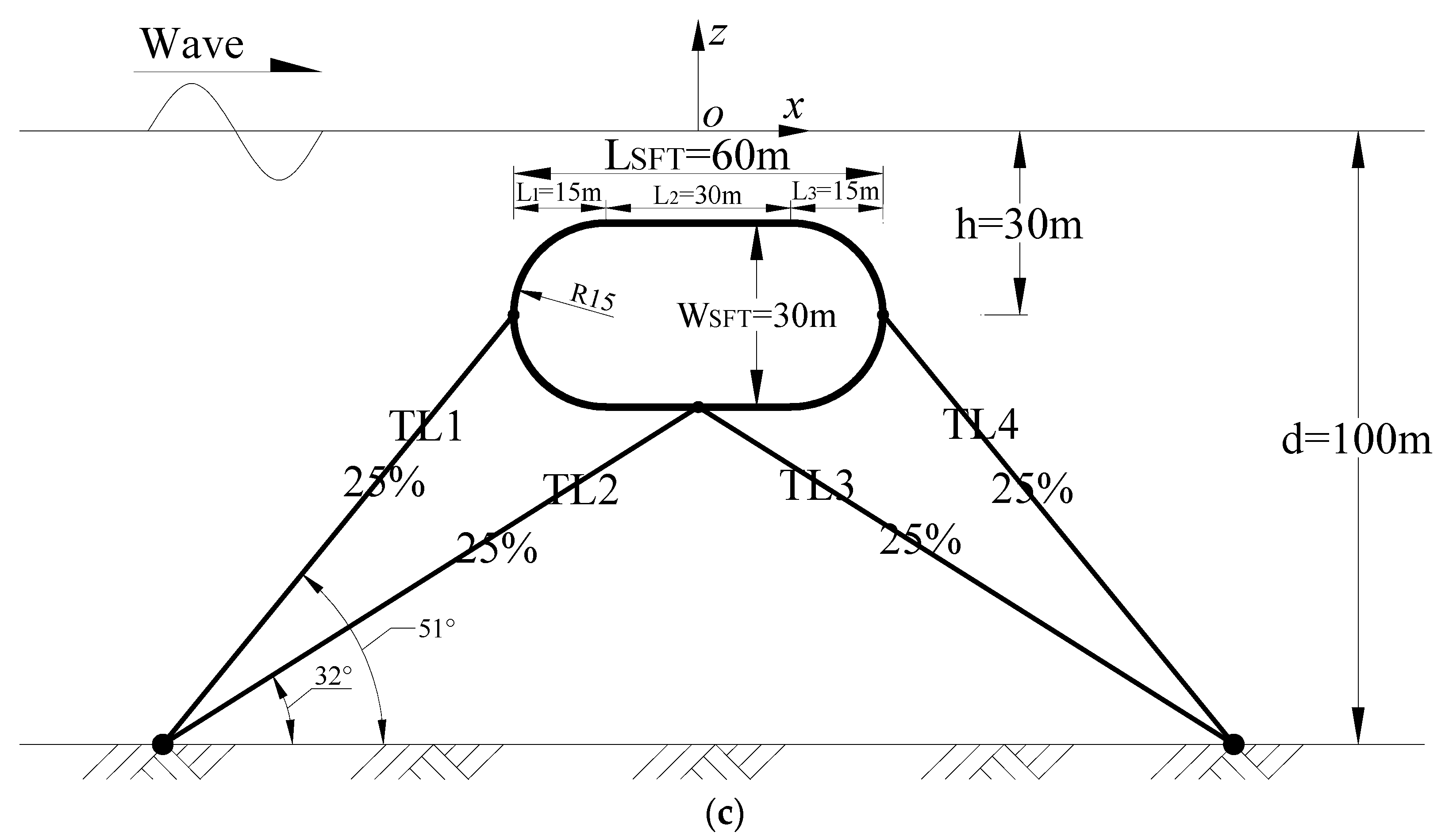
3.1. Parameter Introduction
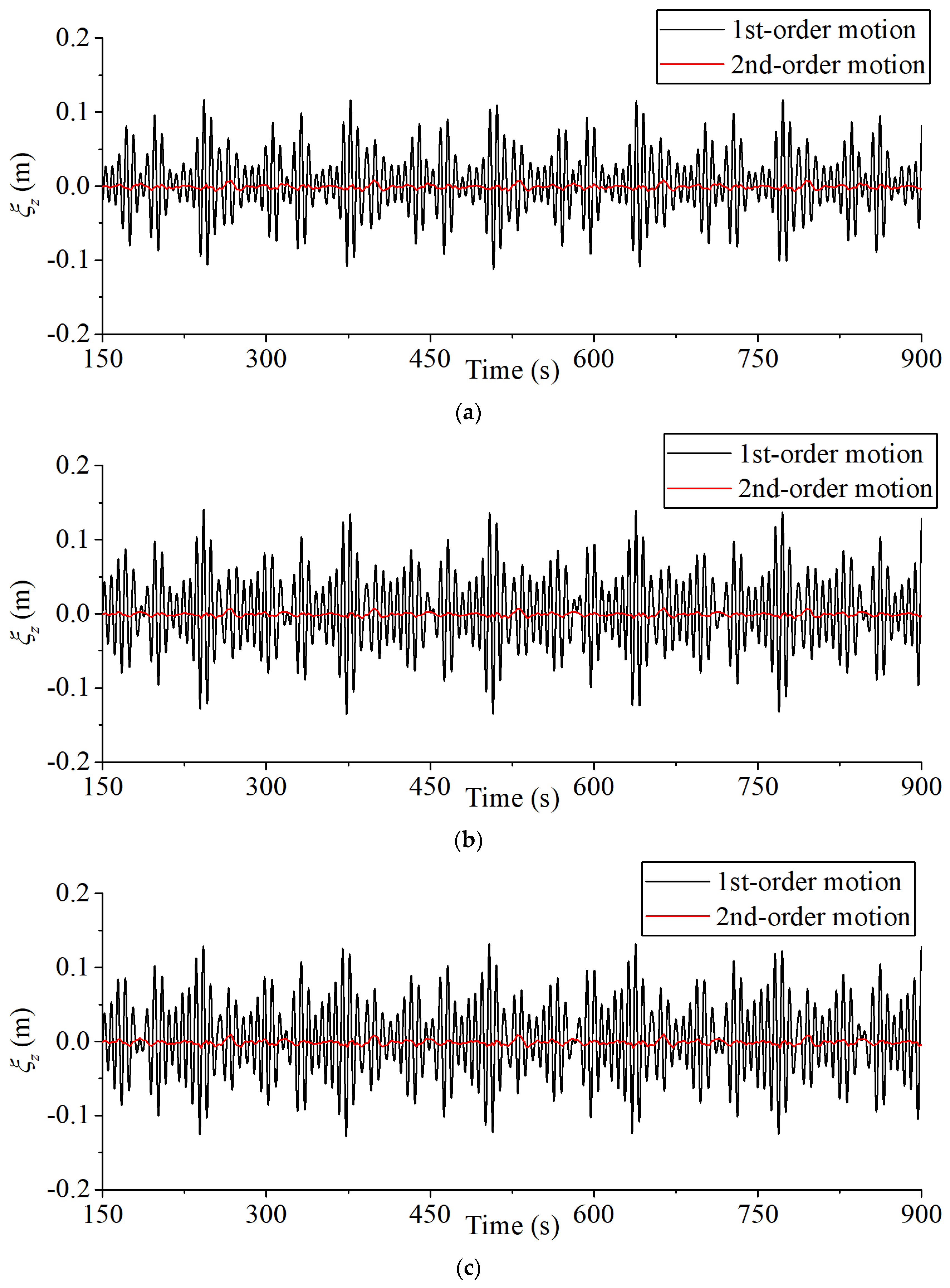
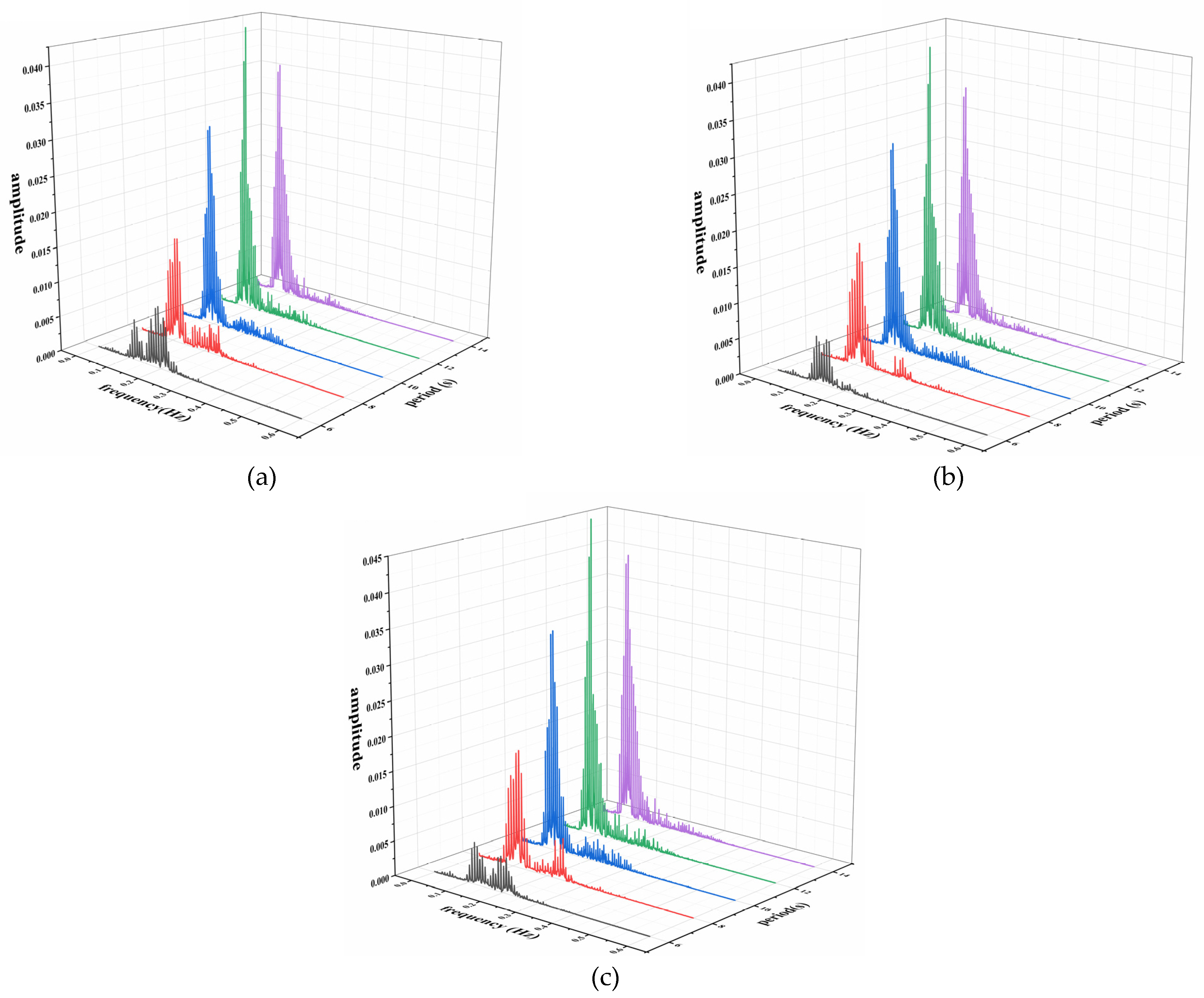
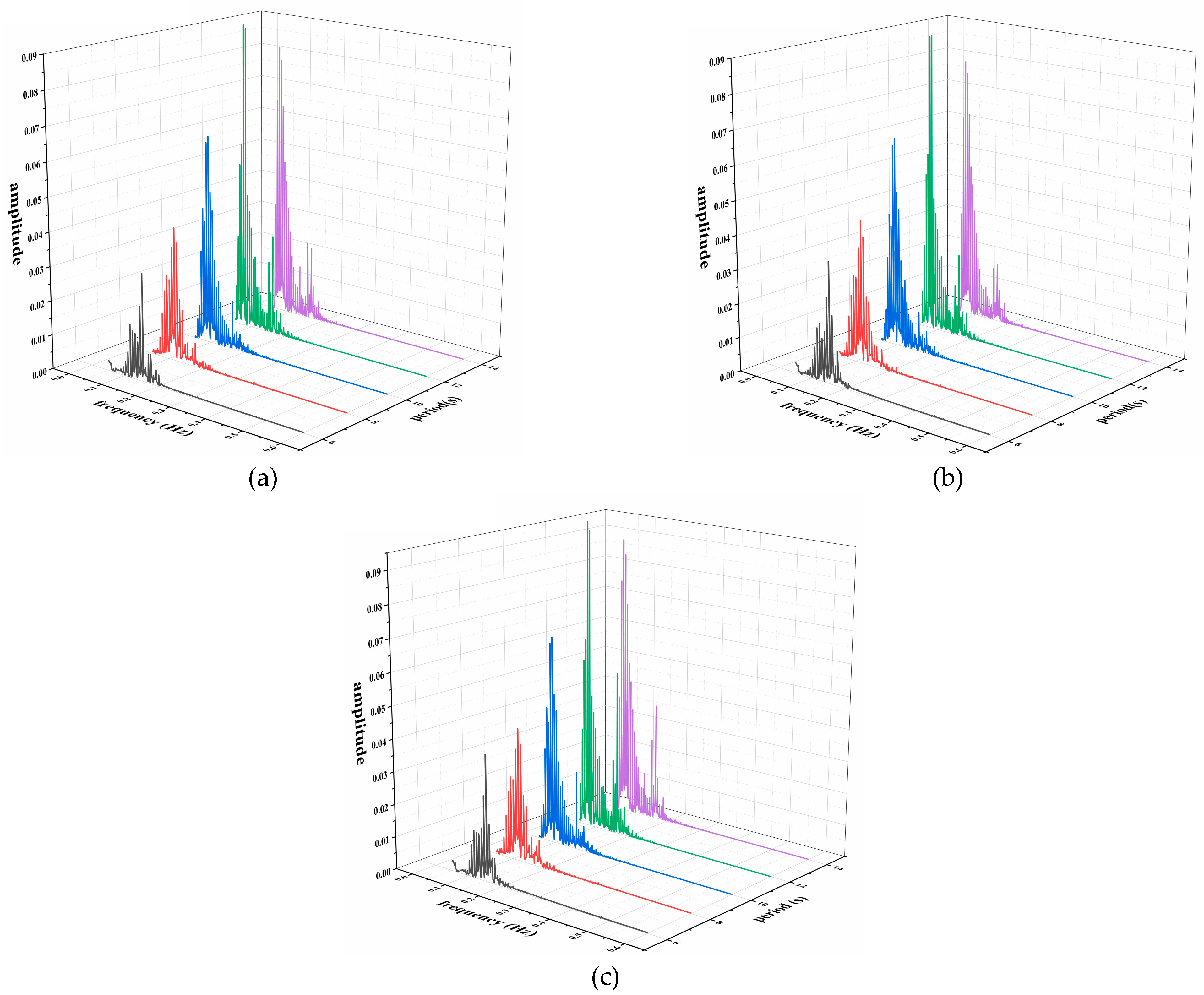
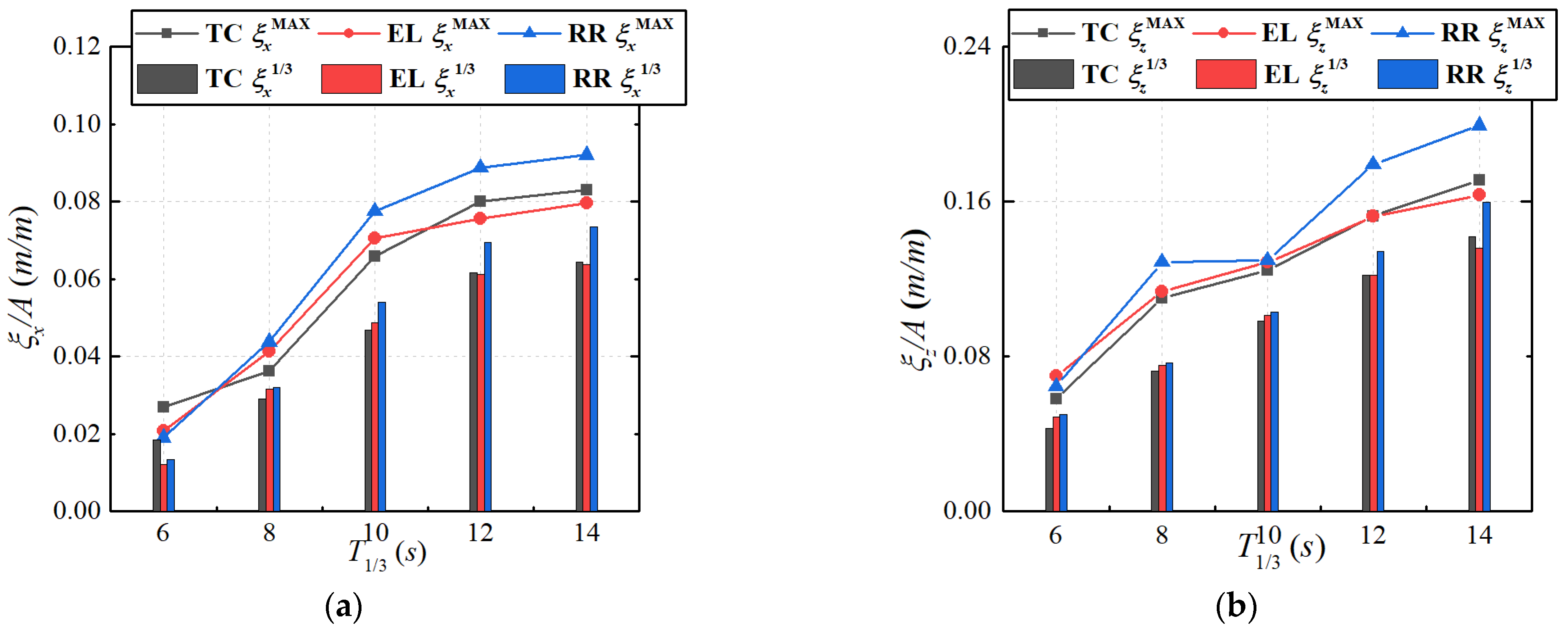
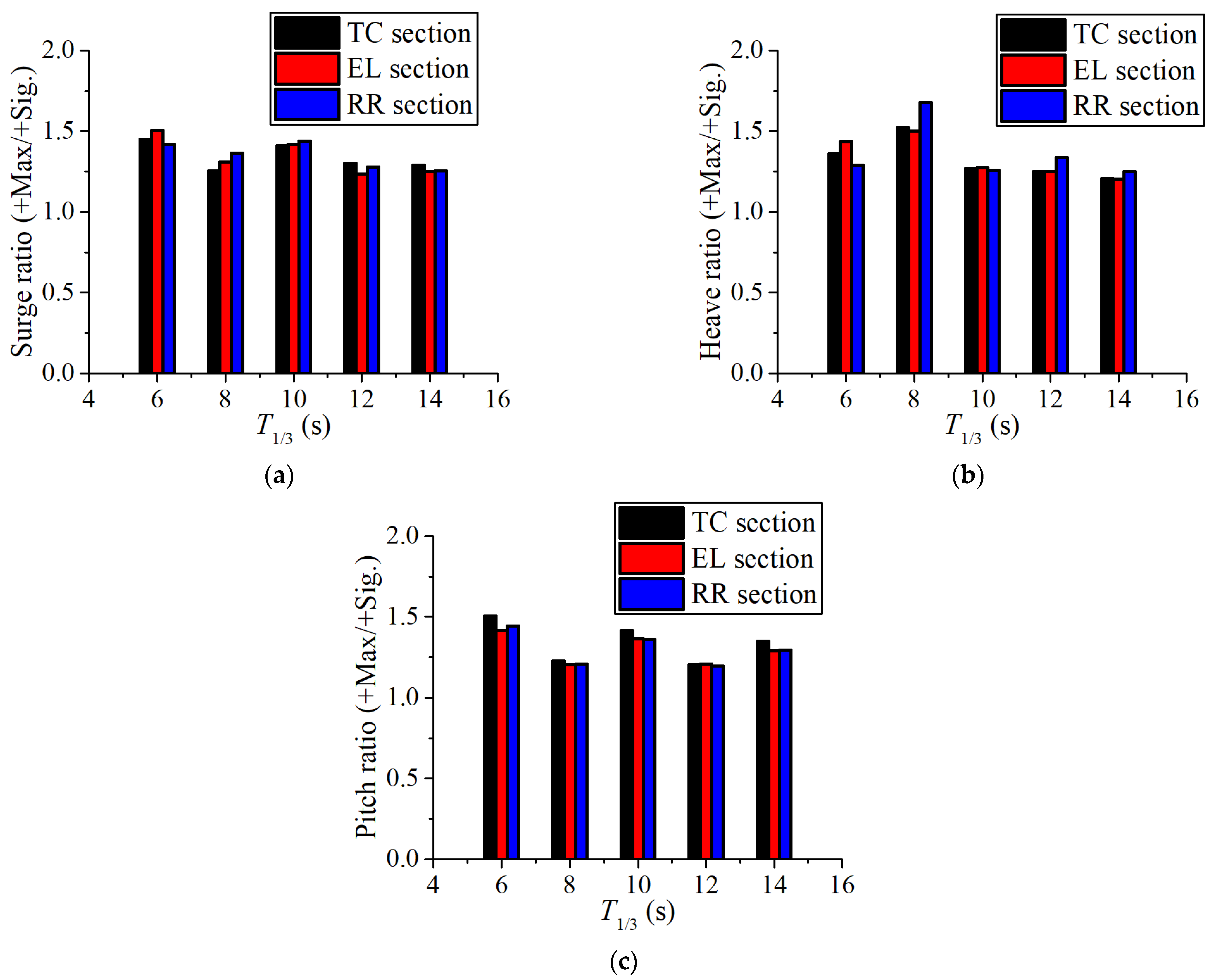
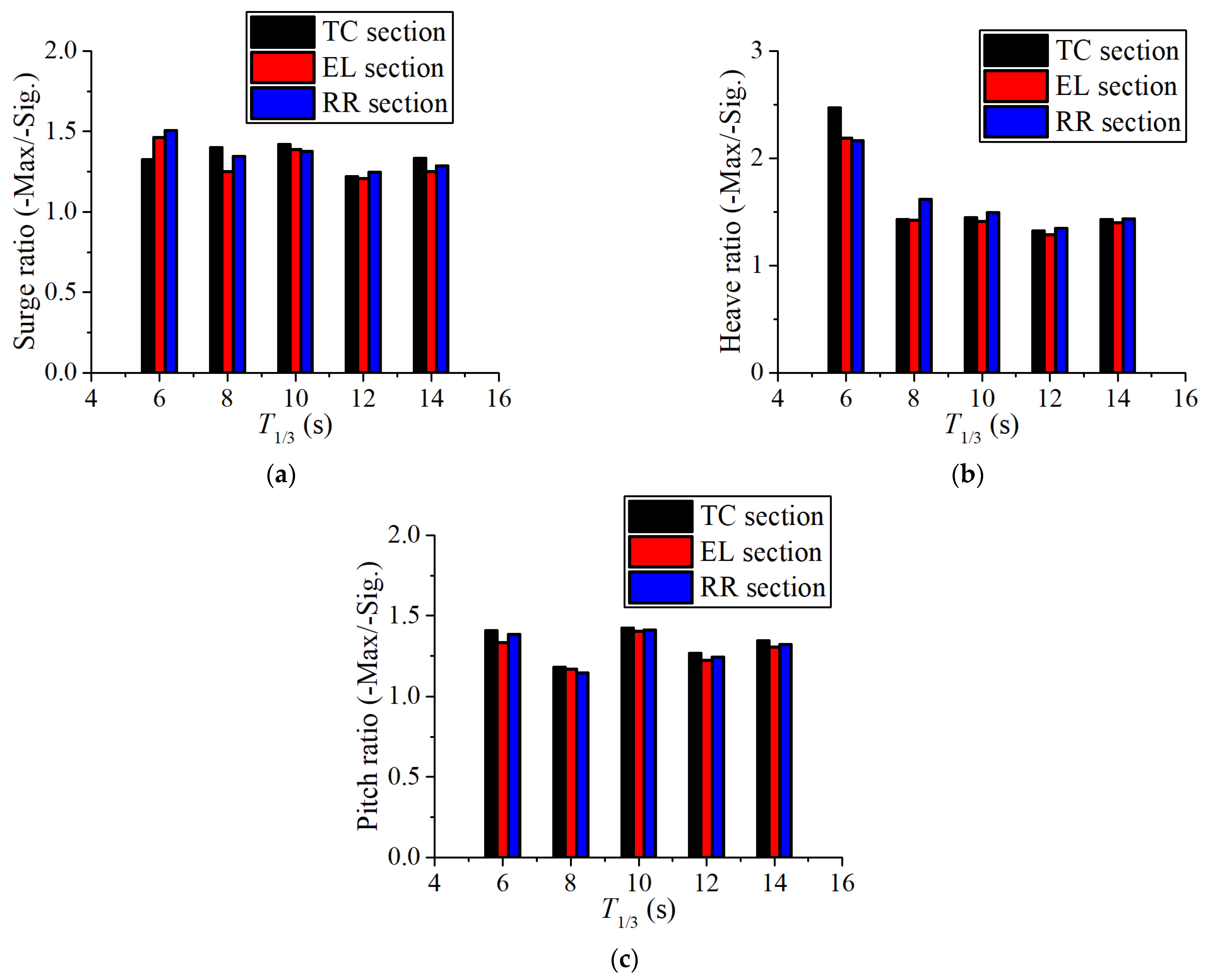
3.2. Motion Response Analysis of SFT with Different Section Forms
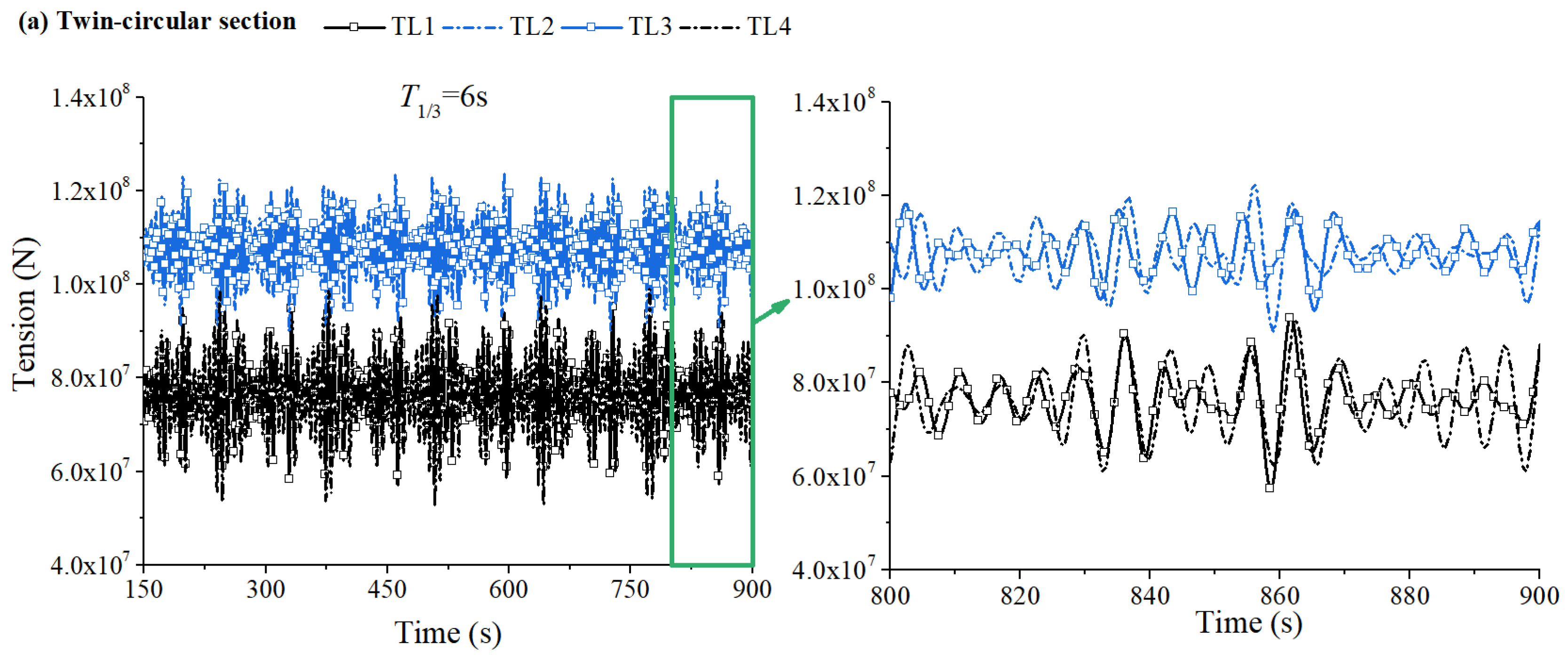
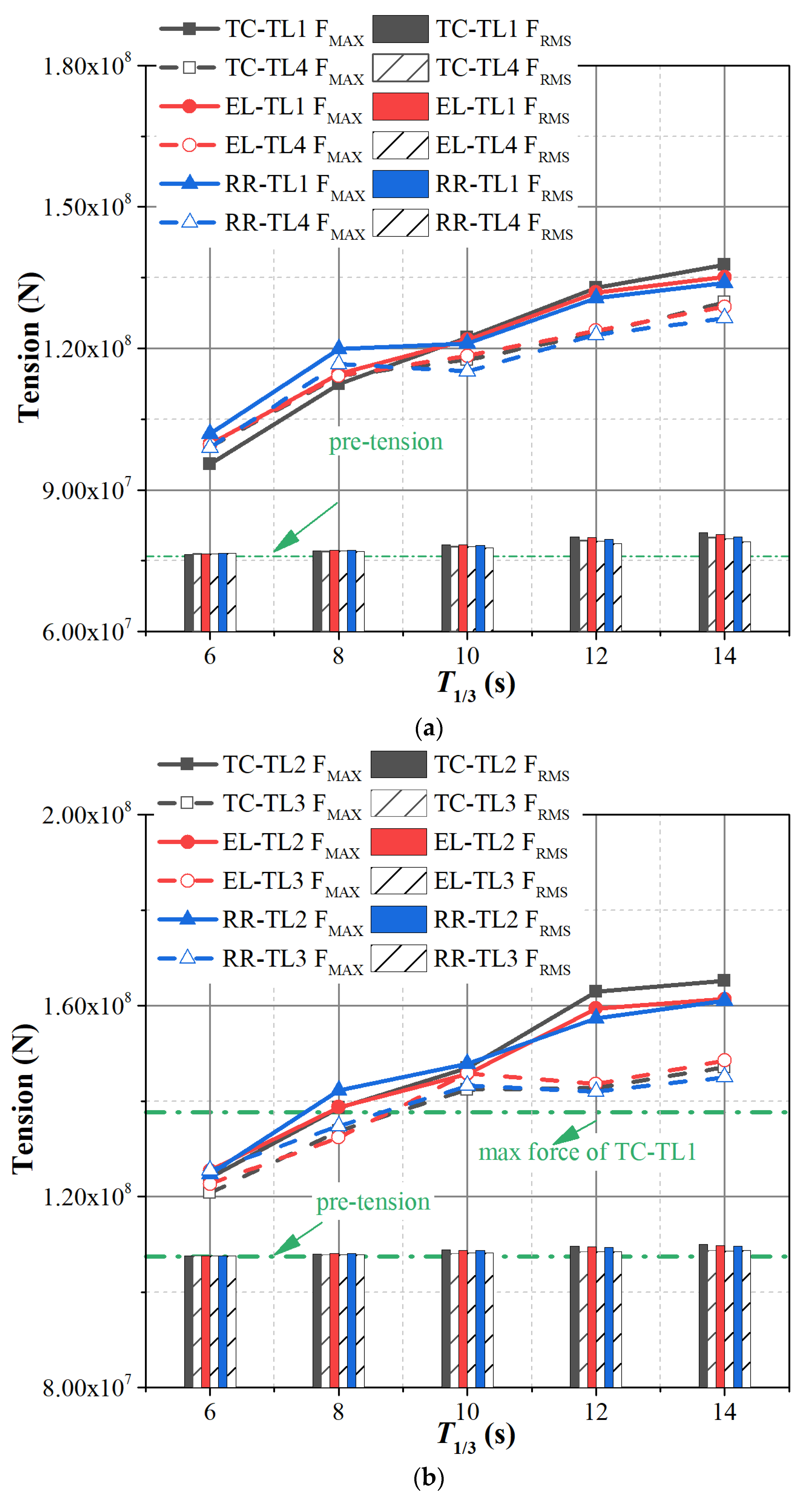
3.3. Mooring Analysis of SFT with Different Section Forms
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Dynamic Force of Mooring Line

Appendix A.2. Coupled Dynamic Analysis

References
- Xiang, Y.Q.; Chen, Z.Y.; Yang, Y. Research Development of Method and Simulation for Analyzing Dynamic Response of Submerged Floating Tunnel. China J. Highw. Transp. 2017, 30, 69–76. (In Chinese) [Google Scholar]
- Geng, B.L.; Liu, Y.; Hu, C.Q.; Jin, R.J. Overview of hydrodynamic study for submerged floating tunnel. J. Waterw. Harb. 2020, 41, 1–8. (In Chinese) [Google Scholar]
- Zhang, H.Q.; Yang, Z.W.; Li, J.Z.; Yuan, C.; Xie, M.; Yang, H.; Yin, H. A global review for the hydrodynamic response investigation method of submerged floating tunnels. Ocean. Eng. 2021, 225, 108825. [Google Scholar] [CrossRef]
- Xiang, Y.Q.; Lin, H.; Bai, H.; Chen, Z.Y.; Yang, Y. Numerical simulation and experimental study of submerged floating tunnel subjected to moving vehicle load. Ocean. Eng. 2021, 235, 109431. [Google Scholar] [CrossRef]
- Jin, C.; Chung, W.C.; Kwon, D.S.; Kim, M.H. Optimization of tuned mass damper for seismic control of submerged floating tunnel. Eng. Struct. 2021, 241, 112460. [Google Scholar] [CrossRef]
- Wu, Z.W.; Wang, D.X.; Ke, W.; Qin, Y.H.; Lu, F.C.; Jiang, M.J. Experimental investigation for the dynamic behavior of submerged floating tunnel subjected to the combined action of earthquake, wave and current. Ocean. Eng. 2021, 239, 109911. [Google Scholar] [CrossRef]
- Won, D.H.; Park, W.S.; Kim, S. Cyclic bending performance of joint on precast composite hollow RC for submerged floating tunnels. Mar. Struct. 2021, 79, 103045. [Google Scholar] [CrossRef]
- Won, D.H.; Seo, J.H.; Pak, W.S.; Kim, S.K. Torsional behavior of precast segment module joints for a submerged floating tunnel. Ocean. Eng. 2021, 220, 108490. [Google Scholar] [CrossRef]
- Won, D.H.; Park, W.S.; Kim, S.J. Vibration characteristics of submerged floating tunnels with suspension cables according to wave periods. Ocean. Eng. 2022, 254, 111342. [Google Scholar] [CrossRef]
- Wu, L.J.; Ma, Y.F.; Liu, M.W.; Wang, Z.H.; Liu, B. Nonlinear characteristics of semirigid and semiflexible segment joints of submerged floating tunnels under the combined axial force and bending moment. Ocean. Eng. 2021, 265, 112651. [Google Scholar] [CrossRef]
- Kwon, D.S.; Jin, C.; Kim, M.H. Prediction of dynamic and structural responses of submerged floating tunnel using artificial neural network and minimum sensors. Ocean. Eng. 2022, 244, 110402. [Google Scholar] [CrossRef]
- Min, S.; Jeong, K.; Noh, Y.; Won, D.; Kim, S. Damage detection for tethers of submerged floating tunnels based on convolutional neural networks. Ocean. Eng. 2022, 250, 111048. [Google Scholar] [CrossRef]
- Shao, D.; Zheng, J.H.; Zhang, J.S.; Yang, Y.F.; Zhang, J.X. Vibrating behavior of submerged floating tunnel in current field investigated with hybrid vector-autoregressive model. Ocean. Eng. 2022, 256, 111359. [Google Scholar] [CrossRef]
- Liu, T.; Viuff, T.; Leira, B.J.; Xiang, X.; Minoretti, A.; Halse, K.H. Response validation of a submerged floating tunnel segment. Ocean. Eng. 2022, 264, 112396. [Google Scholar] [CrossRef]
- Xiang, Y.Q.; Yang, Y. Spatial dynamic response of submerged floating tunnel under impact load. Mar. Struct. 2017, 53, 20–31. [Google Scholar] [CrossRef]
- Sharma, M.; Kaligatla, R.B.; Sahoo, T. Wave interaction with a submerged floating tunnel in the presence of a bottom mounted submerged porous breakwater. Appl. Ocean. Res. 2020, 96, 102069. [Google Scholar] [CrossRef]
- Faggiano, B.; Panduro, J.; Mendoza Rosas, M.T.; Mazzolani, F.M. The conceptual design of a roadway SFT in Baja California, Mexico. In Proceedings of the 2nd International Symposium on Submerged Floating Tunnels and Underwater Tunnel Structures, Chongqing, China, 16–18 December 2016; Volume 166, pp. 3–12. [Google Scholar]
- Jin, R.J.; Liu, Y.; Geng, B.L.; Zhang, H.Q. Hydrodynamic characteristics of circular tube structure with wave action. J. Waterw. Harb. 2019, 40, 249–258. (In Chinese) [Google Scholar]
- Liu, Y.; Jin, R.J.; Geng, B.L.; Ren, C.P. Influence of anchor cable inclination angle on motion response of submerged floating tunnel with different section. J. Hydrodyn. 2020, 35, 237–247. (In Chinese) [Google Scholar]
- Chen, X.B.; Chen, Q.; Chen, Z.W.; Cai, S.Q.; Zhuo, X.R.; Lv, J.G. Numerical modeling of the interaction between submerged floating tunnel and surface waves. Ocean. Eng. 2021, 220, 108494. [Google Scholar] [CrossRef]
- Won, D.; Seo, J.; Kim, S. Dynamic response of submerged floating tunnels with dual sections under irregular waves. Ocean. Eng. 2021, 241, 110025. [Google Scholar] [CrossRef]
- Deng, S.; Ren, H.J.; Xu, Y.W.; Fu, S.X.; Moan, T.; Gao, Z. Experimental study on the drag forces on a twin-tube submerged floating tunnel segment model in current. Appl. Ocean. Res. 2020, 104, 102326. [Google Scholar] [CrossRef]
- Deng, S.; Ren, H.J.; Xu, Y.W.; Fu, S.X.; Moan, T.; Gao, Z. Experimental study of vortex-induced vibration of a twin-tube submerged floating tunnel segment model. J. Fluids Struct. 2020, 94, 102908. [Google Scholar] [CrossRef]
- Deng, S.; Xu, Y.W.; Ren, H.J.; Fu, S.X.; Li, S.; Moan, T.; Gao, Z. Numerical simulation of wave-induced hydroelastic response and flow-induced vibration of a twin-tube submerged floating tunnel. Mar. Struct. 2022, 82, 103124. [Google Scholar] [CrossRef]
- Shivakumar, B.P.; Karmaker, D. Hydrodynamic analysis of floating tunnel with submerged rubble mound breakwater. Ocean. Eng. 2022, 264, 112460. [Google Scholar]
- Jin, R.J.; Gou, Y.; Geng, B.L.; Zhang, H.Q.; Liu, Y. Coupled dynamic analysis for wave action on a tension leg-type submerged floating tunnel in time domain. Ocean. Eng. 2020, 212, 107600. [Google Scholar] [CrossRef]
- Tahar, A.; Kim, M.H. Coupled-dynamic analysis of floating structures with polyester mooring lines. Ocean. Eng. 2008, 35, 1676–1685. [Google Scholar] [CrossRef]
- Yang, M.D.; Teng, B.; Ning, D.Z.; Shi, Z.M. Coupled dynamic analysis for wave interaction with a truss spar and its mooring line/riser system in time domain. Ocean. Eng. 2012, 39, 72–87. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elliptical Section | Twin-Circular Section | Round Rectangular Section | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Direction | Surge | Heave | Pitch | Surge | Heave | Pitch | Surge | Heave | Pitch |
| Coefficient | 0.207 | 0.321 | 1.861 | 0.231 | 0.425 | 2.009 | 0.153 | 0.192 | 1.581 |
| Item | Value |
|---|---|
| Space of tension leg (m) | 100 |
| Length (m) | 90 (TL1 & TL4)/102.6 (TL2 & TL3) |
| Angle (°) | 51 (TL1 & TL4)/32 (TL2 & TL3) |
| Outer diameter (mm) | 816 |
| Wall thickness (mm) | 40 |
| Weight in the air (kg/m) | 769 |
| Weight in the water (kg/m) | 665 |
| Tensile stiffness (N) | 1.950 × 1010 |
| Bending stiffness(N·m2) | 8.120 × 108 |
| Inertia force coefficient (kg/m) | 1330 |
| Drag force coefficient (kg/m) | 501 |
| Pretension (N) | 7.596 × 107 (TL1 & TL4)/1.102 × 108 (TL2 & TL3) |
| EL | TC | RR | |
|---|---|---|---|
| Number of SFT surface grids | 96 | 128 | 184 |
| Number of water surface grids | 400 | 400 | 400 |
| Surge Motion | Heave Motion | Pitch Motion | ||||
|---|---|---|---|---|---|---|
| Max (+)/Max (−) | Sig. (+)/Sig. (−) | Max (+)/Max (−) | Sig. (+)/Sig. (−) | Max (+)/Max (−) | Sig. (+)/Sig. (−) | |
| TC | 1.015 | 1.009 | 0.769 | 0.902 | 0.994 | 0.981 |
| EL | 1.083 | 1.029 | 0.811 | 0.914 | 0.982 | 0.974 |
| RR | 1.030 | 1.028 | 0.788 | 0.914 | 0.976 | 0.973 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, R.; Zhang, Y.; Zhou, Z.; He, M. Numerical Analysis of Hydrodynamic Characteristics of Two-Dimensional Submerged Structure in Irregular Waves. Water 2024, 16, 1693. https://doi.org/10.3390/w16121693
Jin R, Zhang Y, Zhou Z, He M. Numerical Analysis of Hydrodynamic Characteristics of Two-Dimensional Submerged Structure in Irregular Waves. Water. 2024; 16(12):1693. https://doi.org/10.3390/w16121693
Chicago/Turabian StyleJin, Ruijia, Yu Zhang, Zhibo Zhou, and Ming He. 2024. "Numerical Analysis of Hydrodynamic Characteristics of Two-Dimensional Submerged Structure in Irregular Waves" Water 16, no. 12: 1693. https://doi.org/10.3390/w16121693
APA StyleJin, R., Zhang, Y., Zhou, Z., & He, M. (2024). Numerical Analysis of Hydrodynamic Characteristics of Two-Dimensional Submerged Structure in Irregular Waves. Water, 16(12), 1693. https://doi.org/10.3390/w16121693