A Multivariate Balanced Initial Ensemble Generation Approach for an Atmospheric General Circulation Model



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. The Forecast Model
3. Data Assimilation Scheme
4. Multivariable Balanced Initial Perturbation Scheme
5. Data Assimilation Experiments
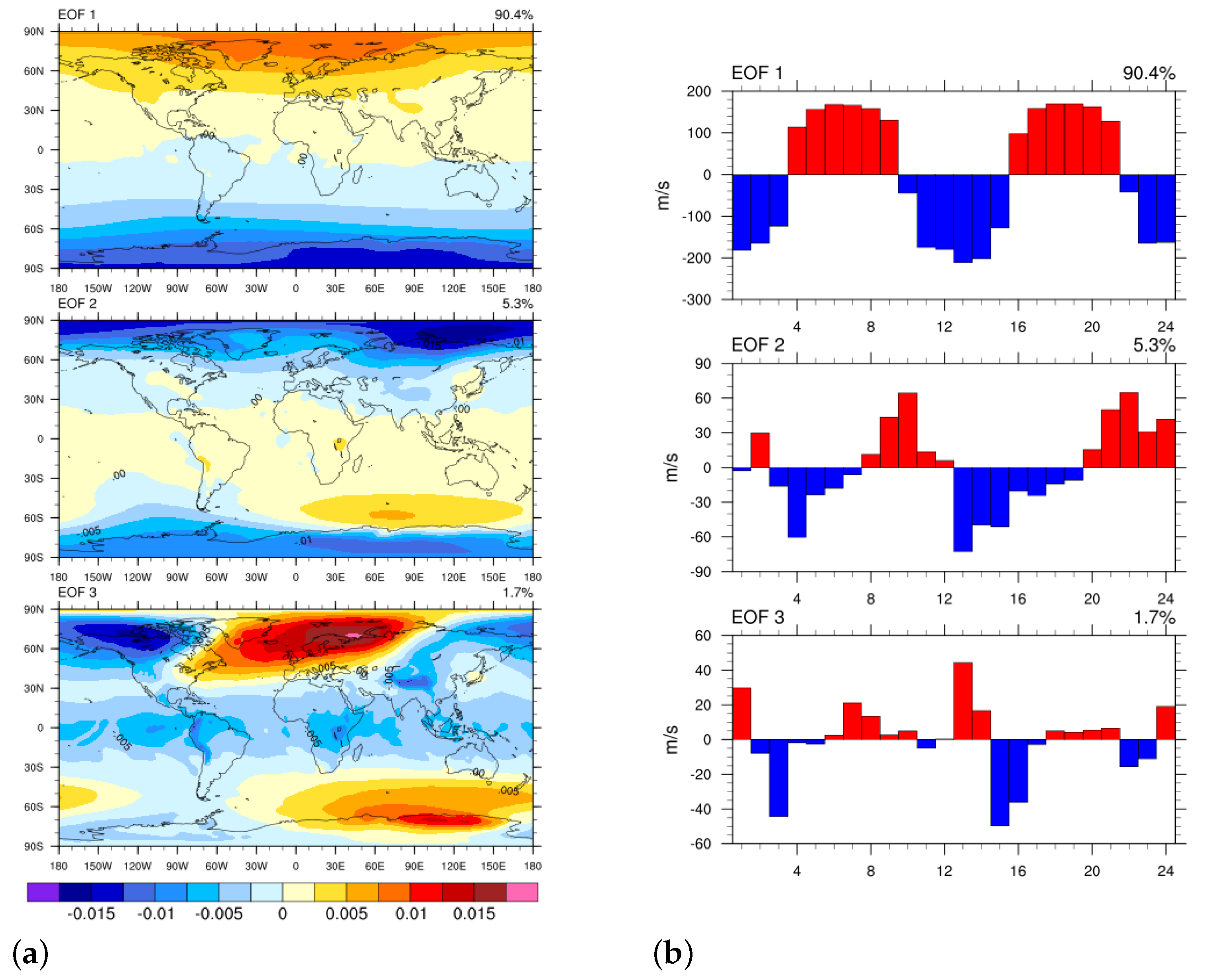
5.1. The MEOF Analysis Results
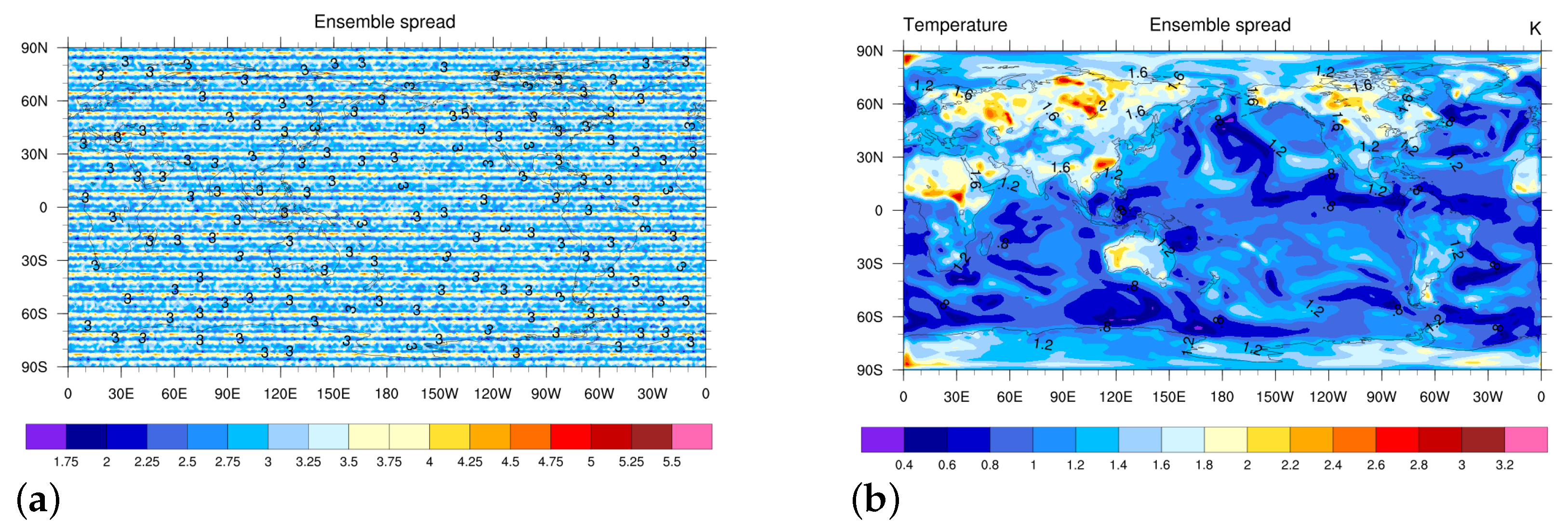
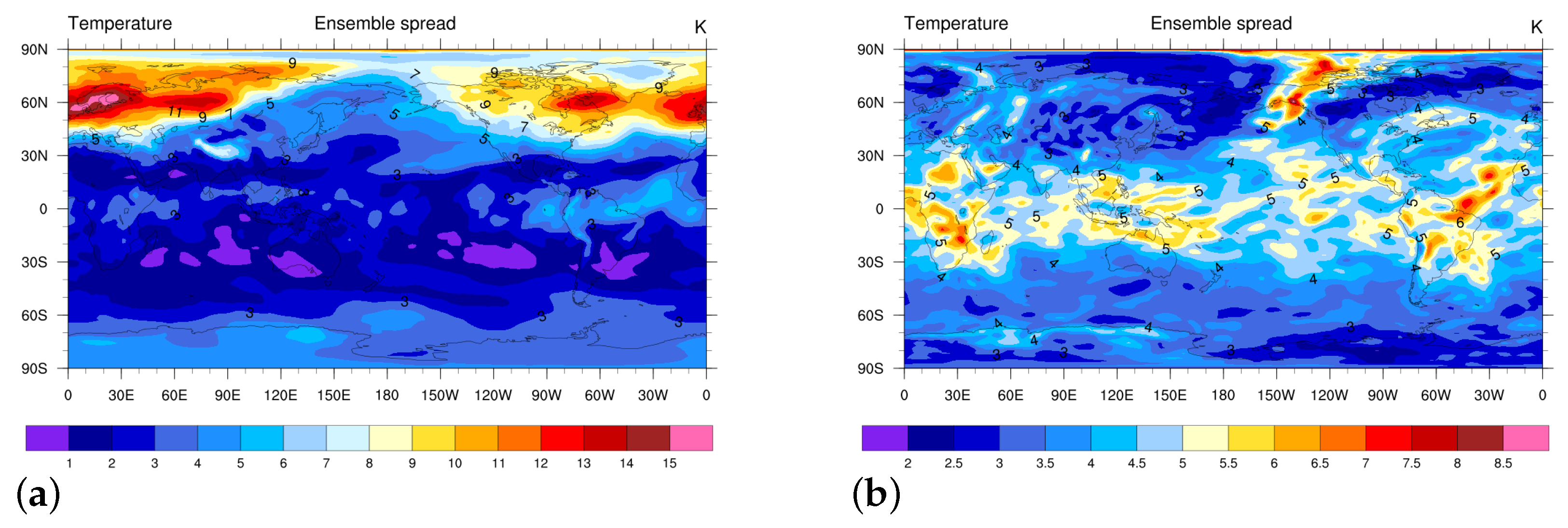
5.2. Ensemble Spread
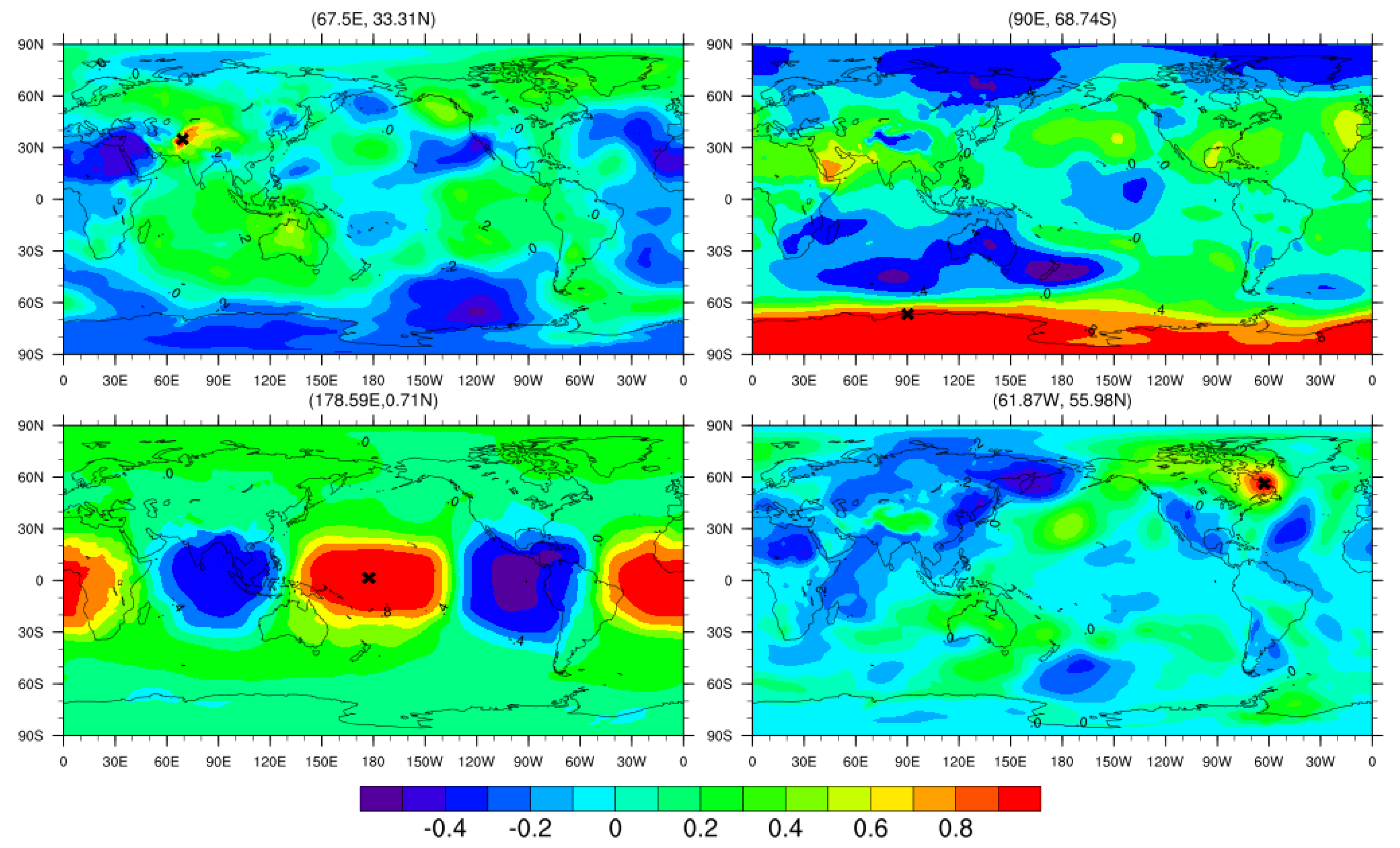
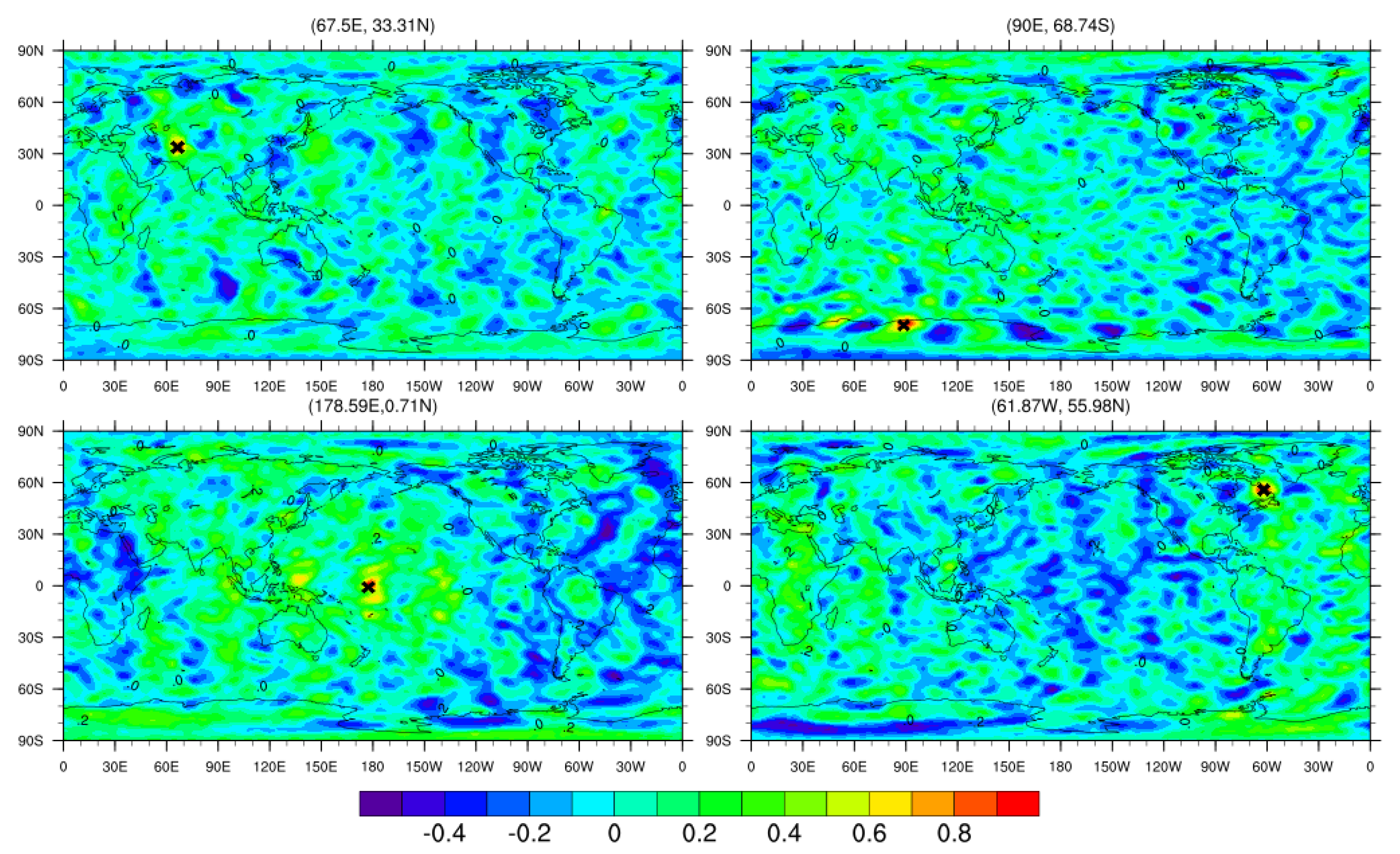
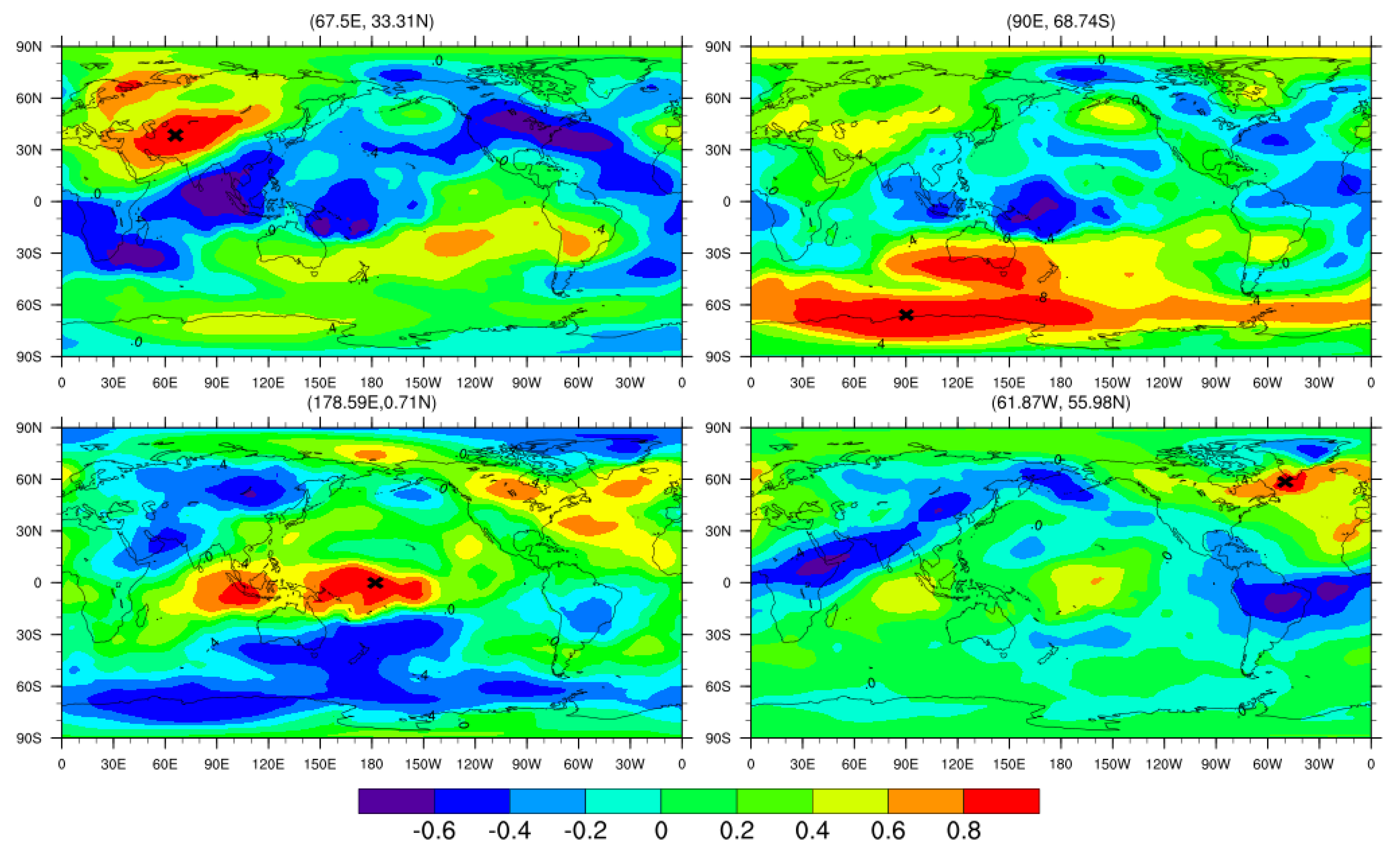
5.3. Horizontal Correlation
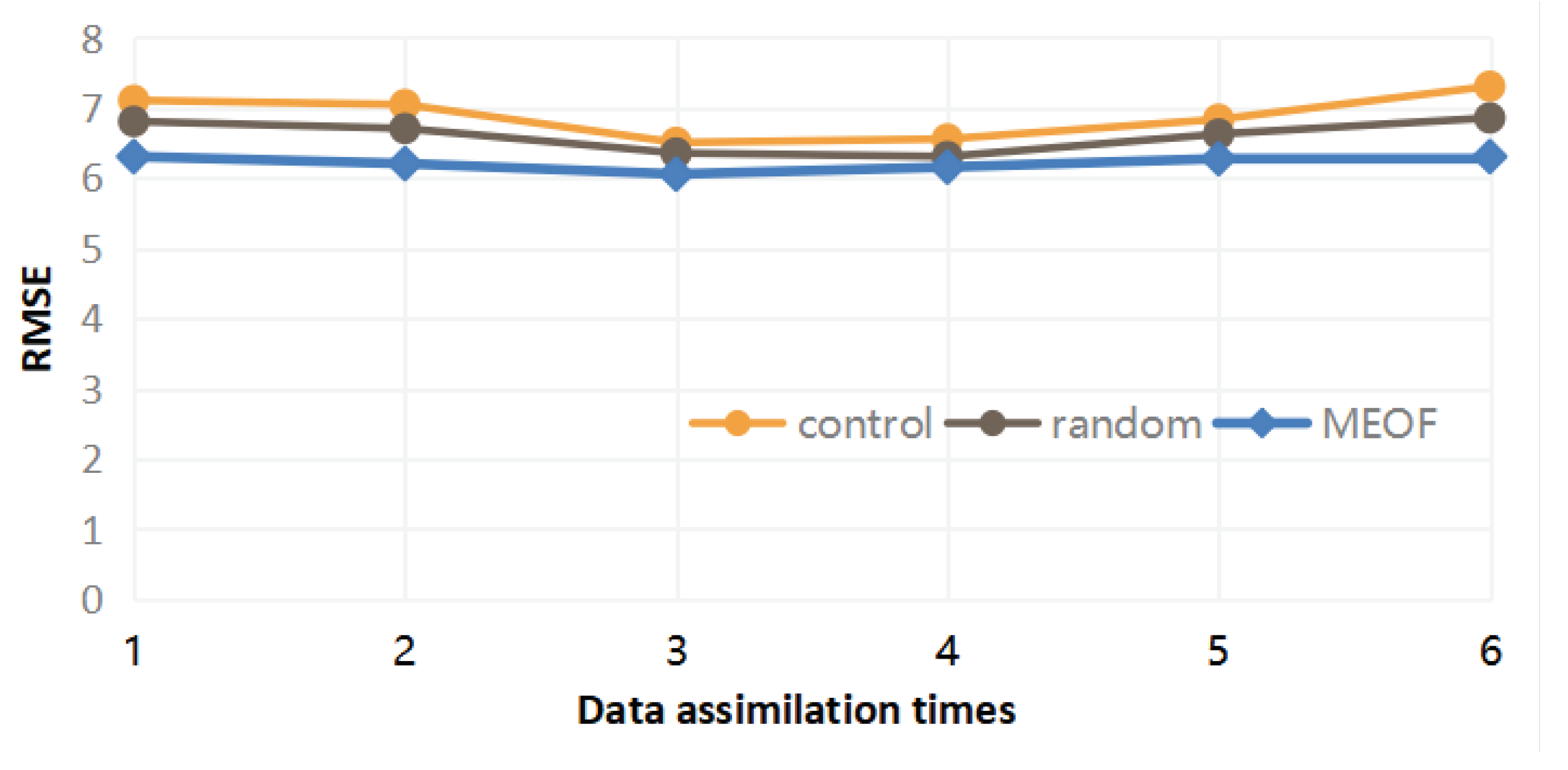
5.4. LETKF Data Assimilation Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Evensen, G. Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics. J. Geophys. Res. 1994, 99, 10143–10162. [Google Scholar] [CrossRef]
- Blum, J.; Le Dimet, F.X.; Navon, I.M. Data Assimilation for Geophysical Fluids; Chapter in Computational Methods for the Atmosphere and the Oceans, Volume 14, Special Volume of Handbook of Numerical Analysis; Temam, R., Tribbia, J., Eds.; Elsevier Science Ltd.: New York, NY, USA, 2009; 784p, ISBN 978-0-444-51893-4. [Google Scholar]
- Burgers, G.; Evensen, G.; Leeuwen, P.J. On the Analysis Scheme in the Ensemble Kalman Filter. Mon. Weather Rev. 1998, 126, 1719–1724. [Google Scholar] [CrossRef]
- Evensen, G.; Leeuwen, P.J. Assimilation of Geosat Altimeter Data for the Agulhas Current using the Ensemble Kalman Filter with a Quasi-Geostrophic Model. Mon. Weather Rev. 1996, 124, 85–96. [Google Scholar] [CrossRef]
- Evensen, G. The ensemble Kalman filter: Theoretical formulation and practical implementation. Ocean Dyn. 2003, 53, 343–367. [Google Scholar] [CrossRef]
- Kalnay, E. Atmospheric Modeling, Data Assimilation and Predictability; Cambridge University Press: London, UK, 2003; 341p. [Google Scholar]
- Nerger, L.; Hiller, W.; Schroter, J. PDAF—The Parallel Data Assimilation Framework: Experiences with Kalman filtering. In Use of High Performance Computing in Meteorology-Proceedings of the 11 ECMWF Workshop; Zwieflhofer, W., Mozdzynski, G., Eds.; World Scientific: Reading, UK, 2005; pp. 63–83. [Google Scholar]
- Du, J.; Zhu, J.; Fang, F.; Pain, C.C.; Navon, I.M. Ensemble data assimilation applied to an adaptive mesh ocean model. Int. J. Numer. Meth. Fluids 2016, 82, 997–1009. [Google Scholar] [CrossRef]
- Du, J.; Navon, I.M.; Zhu, J.; Fang, F.; Alekseev, A.K. Reduced order modeling based on POD of a parabolized Navier-Stokes equations model II: Trust region POD 4D VAR data assimilation. Comput. Math. Appl. 2013, 65, 380–394. [Google Scholar] [CrossRef]
- Sakov, P.; Oliver, D.S.; Bertino, L. An Iterative EnKF for Strongly Nonlinear Systems. Mon. Weather. Rev. 2011, 140, 1988–2004. [Google Scholar] [CrossRef]
- Houtekamer, P.L.; Mitchell, H.L. Data assimilation using an ensemble Kalman filter technique. Mon. Wea. Rev. 1998, 126, 796–811. [Google Scholar] [CrossRef]
- Tippett, M.K.; Anderson, J.L.; Bishop, C.H.; Hamill, T.M.; Whitaker, J.S. Ensemble square root filters. Mon. Wea. Rev. 2003, 131, 1485–1490. [Google Scholar] [CrossRef]
- Whitaker, J.S.; Hamill, T.M. Ensemble data assimilation without perturbed observations. Mon. Wea. Rev. 2002, 130, 1913–1924. [Google Scholar] [CrossRef]
- Houtekamer, P.L.; Mitchell, H.L.; Pellerin, G.; Buehner, M.; Charron, M.; Spacek, L.; Hansen, B. Atmospheric data assimilation with an ensemble Kalman filter: Results with real observations. Mon. Wea. Rev. 2005, 133, 604–620. [Google Scholar] [CrossRef]
- Ott, E.; Hunt, B.R.; Szunyogh, I.; Zimin, A.V.; Kostelich, E.J.; Corazza, M.; Kalnay, E.; Patil, D.J.; Yorke, J.A. A local ensemble Kalman filter for atmospheric data assimilation. Tellus 2004, 56, 415–428. [Google Scholar] [CrossRef]
- Bishop, C.H.; Etherton, B.; Majumdar, S.J. Adaptive sampling with the ensemble transform Kalman filter. Part I: Theoretical aspects. Mon. Wea. Rev. 2001, 129, 420–436. [Google Scholar] [CrossRef]
- Hunt, B.; Kostelich, E.; Syzunogh, I. Efficient data assimilation for spatiotemporal chaos: A local ensemble transform Kalman filter. Physica D 2007, 230, 112–126. [Google Scholar] [CrossRef]
- Miyoshi, T.; Yamane, S. Local ensemble transform Kalman filtering with an agcm at a T159/L48 resolution. Mon. Wea. Rev. 2007, 135, 3841–3861. [Google Scholar] [CrossRef]
- Toth, Z.; Kalnay, E. Ensemble forecasting at NCEP and the breeding method. Mon. Wea. Rev. 1997, 125, 3297–3319. [Google Scholar] [CrossRef]
- Buizza, R.; Palmer, T.N. The singular-vector structure of the atmospheric global circulation. J. Atmos. Sci. 1995, 52, 1434–1456. [Google Scholar] [CrossRef]
- Houtekamer, P.L.; Derome, J. Methods for ensemble prediction. Mon. Wea. Rev. 1995, 123, 2181–2196. [Google Scholar] [CrossRef]
- Du, J.; Mullen, S.L.; Sanders, F. Short-range ensemble forecasting of quantitative precipitation. Mon. Wea. Rev. 1997, 125, 2427–2459. [Google Scholar] [CrossRef]
- Wan, L.; Zhu, J.; Bertino, L.; Wang, H. Initial ensemble generation and validation for ocean data assimilation using HYCOM in the Pacific. Ocean Dyn. 2008, 58, 81–99. [Google Scholar] [CrossRef]
- Hamill, T.M.; Snyder, C.; Morss, R.E. A comparison of probabilistic forecasts from bred, singular-vector, and perturbed observation ensembles. Mon. Wea. Rev. 2000, 128, 1835–1851. [Google Scholar] [CrossRef]
- Magnusson, L.; Nycander, J.; Kallen, E. Flow-dependent versus flow-independent initial perturbations for ensemble prediction. Tellus 2009, 61A, 194–209. [Google Scholar] [CrossRef]
- Wang, X.; Bishop, C.H. A comparison of breeding and ensemble transform Kalman filter ensemble forecast schemes. J. Atmos. Sci. 2003, 60, 1140–1158. [Google Scholar] [CrossRef]
- Zupanski, M.; Fletcher, S.J.; Navon, I.M.; Uzunoglu, B.; Daescu, D. Initiation of ensemble data assimilation. Tellus 2006, 58A, 159–170. [Google Scholar] [CrossRef]
- Zheng, F.; Zhu, J. Balanced multivariate model errors of an intermediate coupled model for ensemble Kalman filter data assimilation. J. Geophys. Res. 2008, 113, C07002. [Google Scholar] [CrossRef]
- Zheng, F.; Zhu, J. A multivariate empirical orthogonal function-based scheme for the balanced initial ensemble generation of an ensemble kalman filter. Atmos. Ocean. Sci. Lett. 2010, 3, 165–169. [Google Scholar]
- Lin, Z.; Zeng, Q. Simulation of East Asian summer monsoon by using an improved AGCM. Adv. Atmos. Sci. 1997, 14, 513–526. [Google Scholar]
- Zeng, Q.; Yuan, C.; Li, X.; Zhang, R.; Yang, F.; Zhang, B.; Lu, P.; Bi, X.; Wang, H. Seasonal and extraseasonal predictions of summer monsoon precipitation by GCMs. Adv. Atmos. Sci. 1997, 14, 163–176. [Google Scholar]
- Zeng, Q.; Zhang, X.H.; Liang, X.Z.; Yuan, C.G.; Chen, S.F. Documentation of IAP Two-Level Atmospheric General Circulation Model; Rep. DOE/ER/60314-H1 TR044; Department of Energy Tech., State Univ. of New York: Stony Brook, NY, USA, 1989; 383p. [Google Scholar]
- Zhang, H.; Zhang, M.; Zeng, Q. Sensitivity of simulated climate to two atmospheric models: Interpretation of differences between dry models and moist models. Mon. Weather. Rev. 2013, 141, 1558–1576. [Google Scholar] [CrossRef]
- Zhang, H. Development of IAP Atmospheric General Circulation Model Version 4.0 and Its Climate Simulations (in Chinese). Ph.D. Thesis, Institute of Atmospheric Physics, Chinese Academy of Sciences, Beijing, China, 2009. [Google Scholar]
- Zuo, R.; Zhang, M.; Zhang, D.; Wang, A.; Zeng, Q. Designing and climatic numerical modeling of 21-level AGCM (IAP AGCM-III). Part I: Dynamical framework (in Chinese). Chin. Atmos. Sci. 2004, 28, 659–674. [Google Scholar]
- Shin, S.; Kang, J.S.; Jo, Y. The Local Ensemble Transform Kalman Filter (LETKF) with a Global NWP Model on the Cubed Sphere. Pure Appl. Geophys. 2016, 173, 2555–2570. [Google Scholar] [CrossRef]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, J.; Zheng, F.; Zhang, H.; Zhu, J. A Multivariate Balanced Initial Ensemble Generation Approach for an Atmospheric General Circulation Model. Water 2021, 13, 122. https://doi.org/10.3390/w13020122
Du J, Zheng F, Zhang H, Zhu J. A Multivariate Balanced Initial Ensemble Generation Approach for an Atmospheric General Circulation Model. Water. 2021; 13(2):122. https://doi.org/10.3390/w13020122
Chicago/Turabian StyleDu, Juan, Fei Zheng, He Zhang, and Jiang Zhu. 2021. "A Multivariate Balanced Initial Ensemble Generation Approach for an Atmospheric General Circulation Model" Water 13, no. 2: 122. https://doi.org/10.3390/w13020122
APA StyleDu, J., Zheng, F., Zhang, H., & Zhu, J. (2021). A Multivariate Balanced Initial Ensemble Generation Approach for an Atmospheric General Circulation Model. Water, 13(2), 122. https://doi.org/10.3390/w13020122