
Ensemble Mapping and Change Analysis of the Seafloor Sediment Distribution in the Sylt Outer Reef, German North Sea from 2016 to 2018

 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
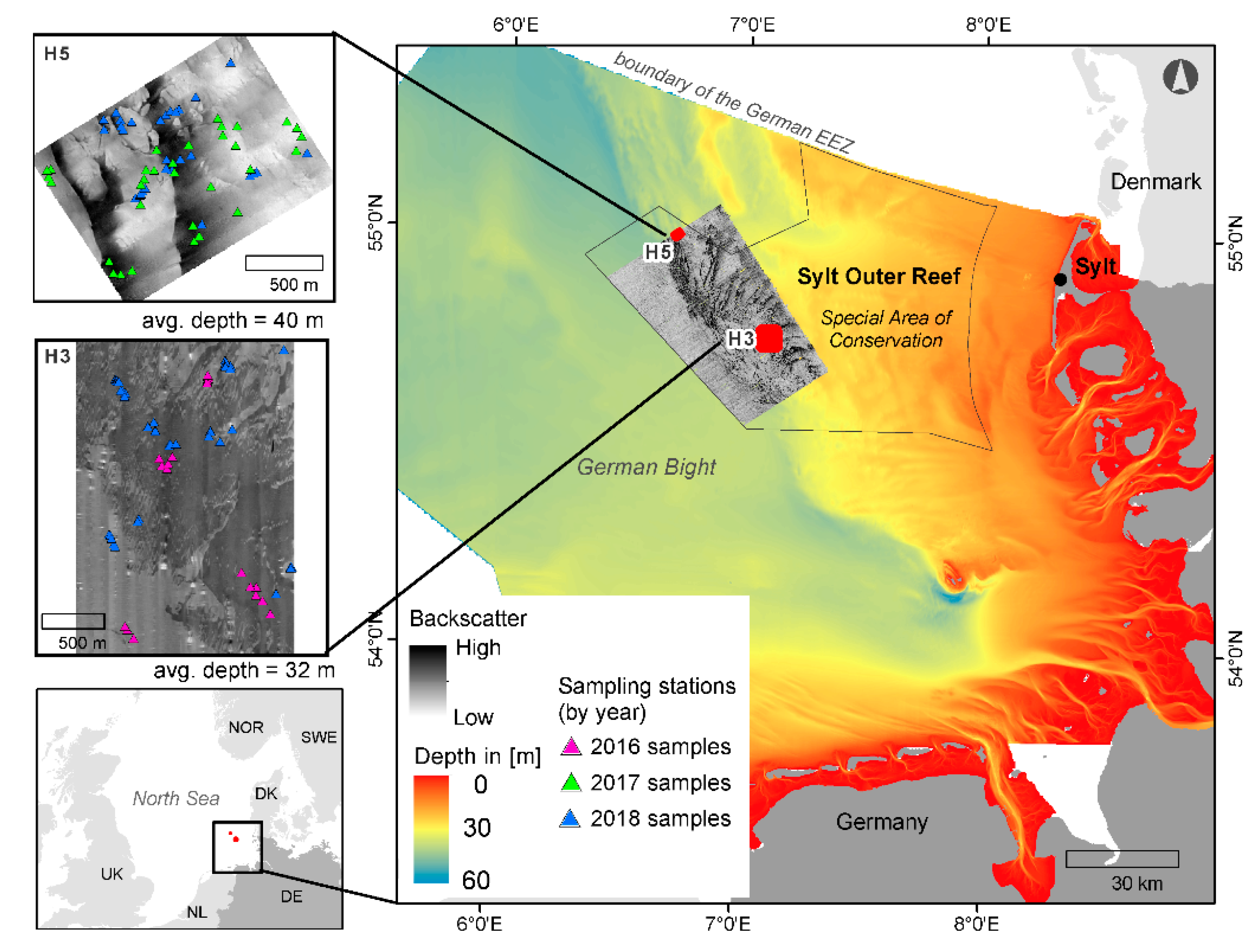
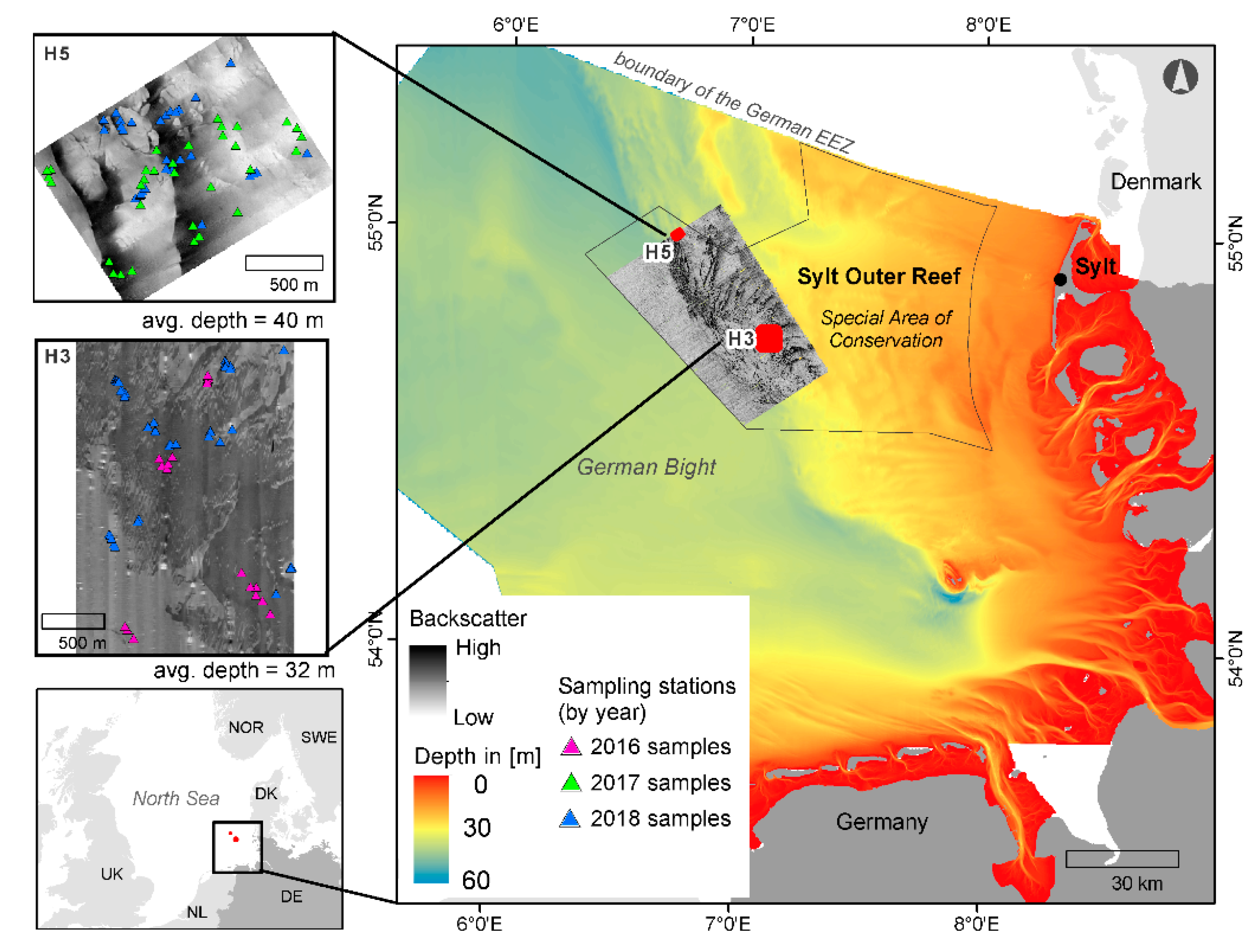
2.1. Study Site
2.2. Data Acquision and Processing
2.3. Modelling Approach
Ensemble Modelling
2.4. Input Data for the Models
2.4.1. Sediment Data
2.4.2. Predictor Variables
2.4.3. Feature Selection
2.5. Model Calibration and Validation
2.6. Ensemble Mapping and Map Accuracy Assessment
2.7. Detecting Changes in Seafloor Sediment Maps
3. Results
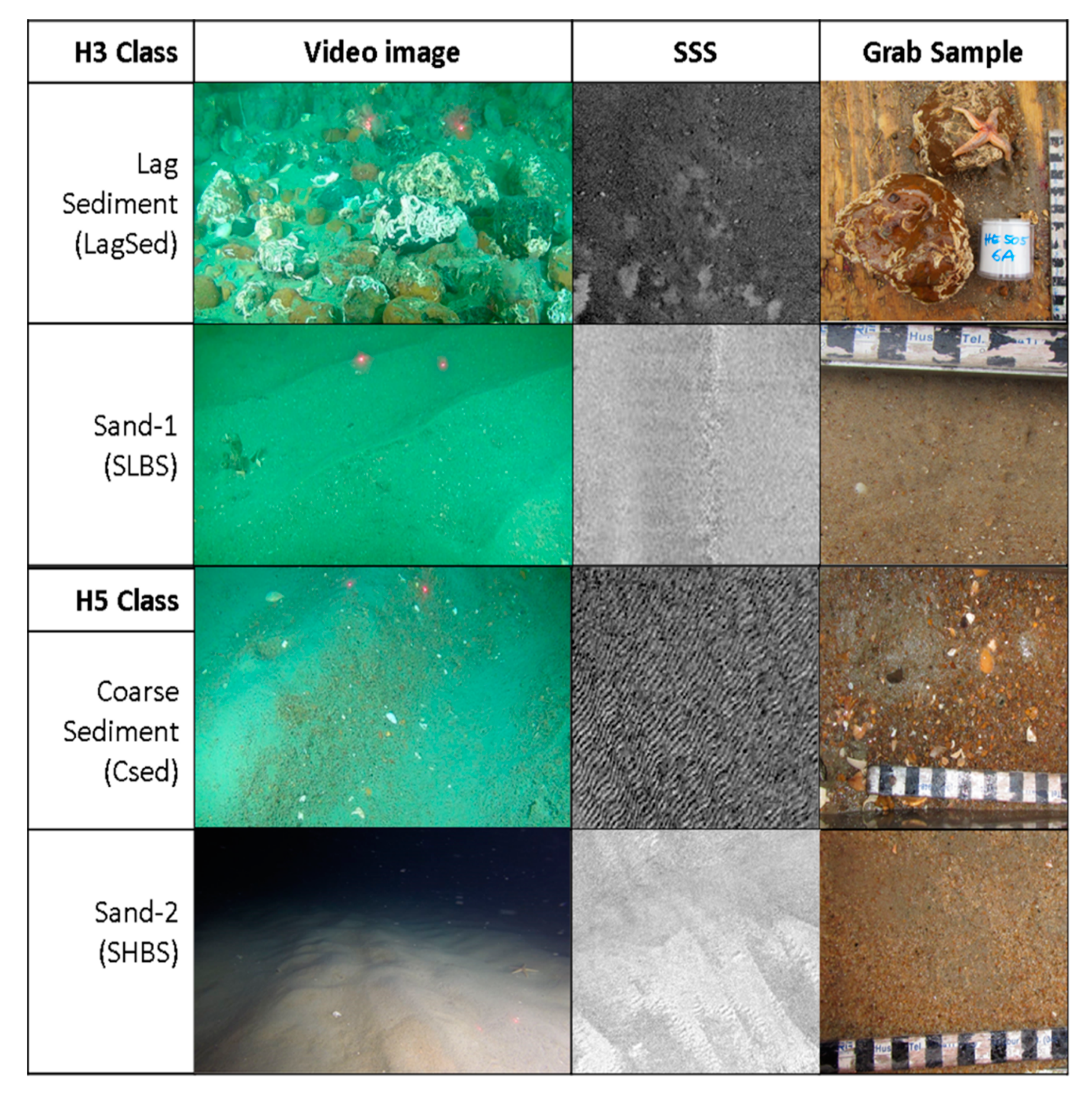
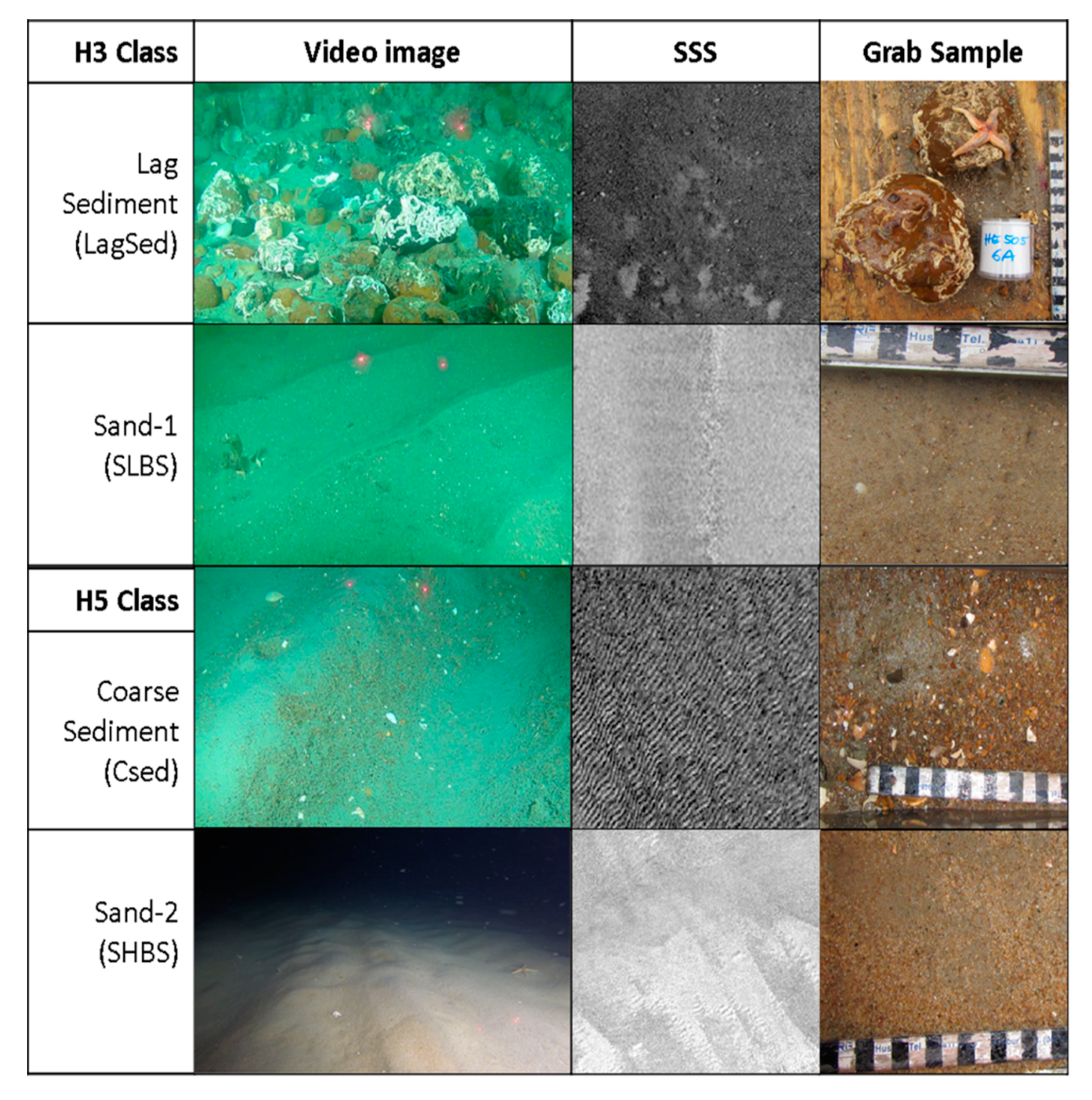
3.1. Sediment Classes Based on Field Survey
3.2. Ensemble Model Performance
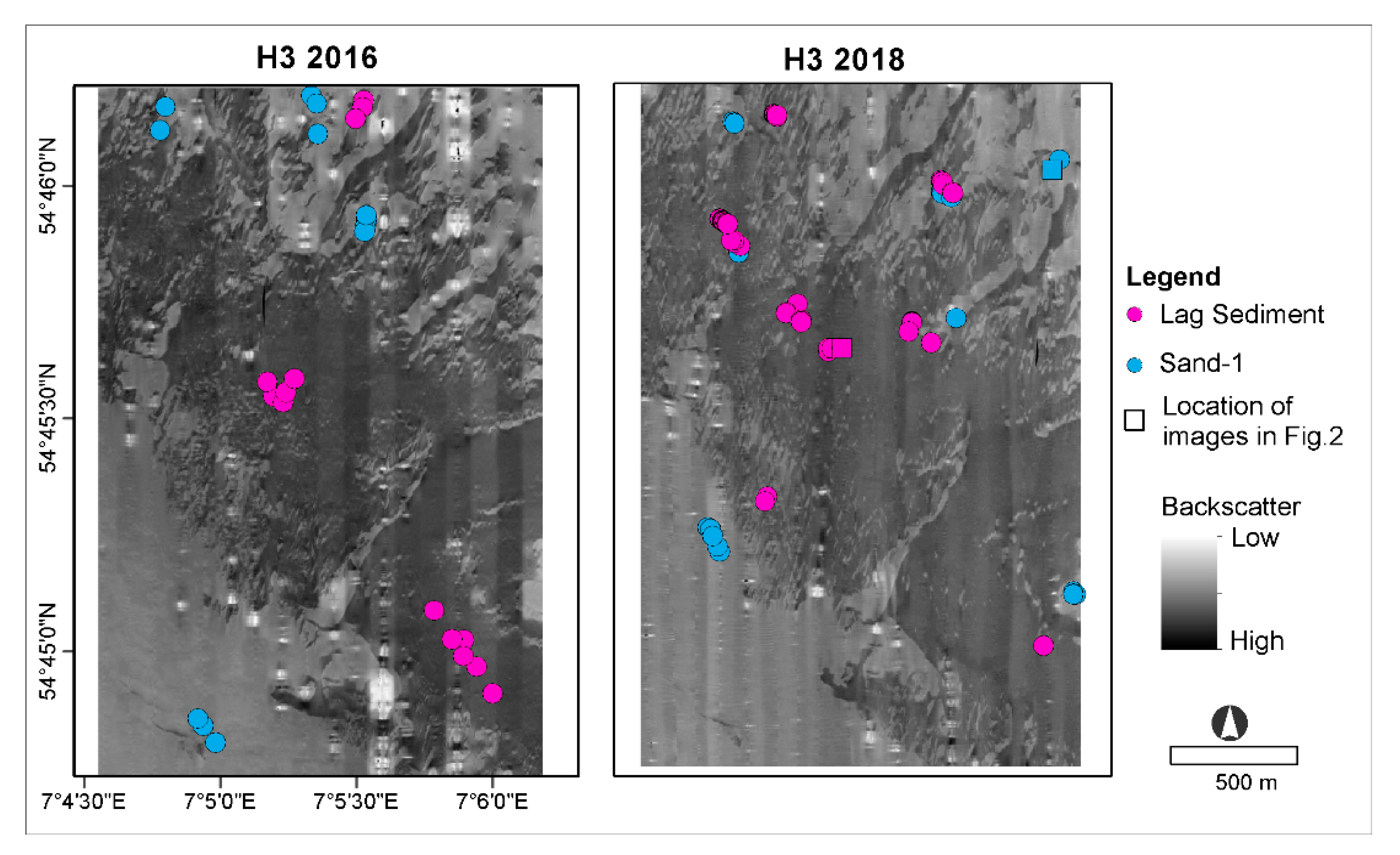
3.3. Seafloor Sediment Distribution in H3
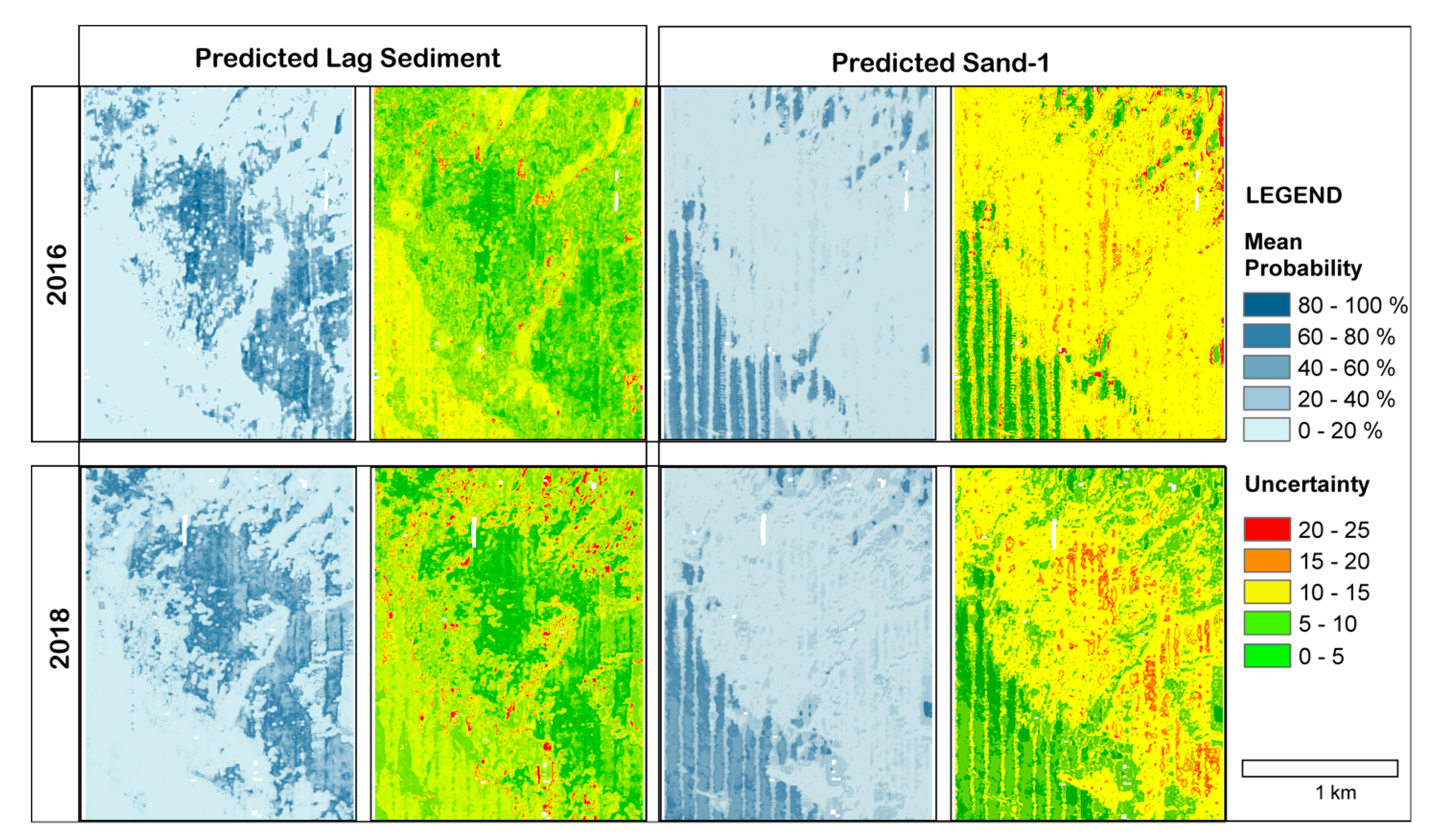
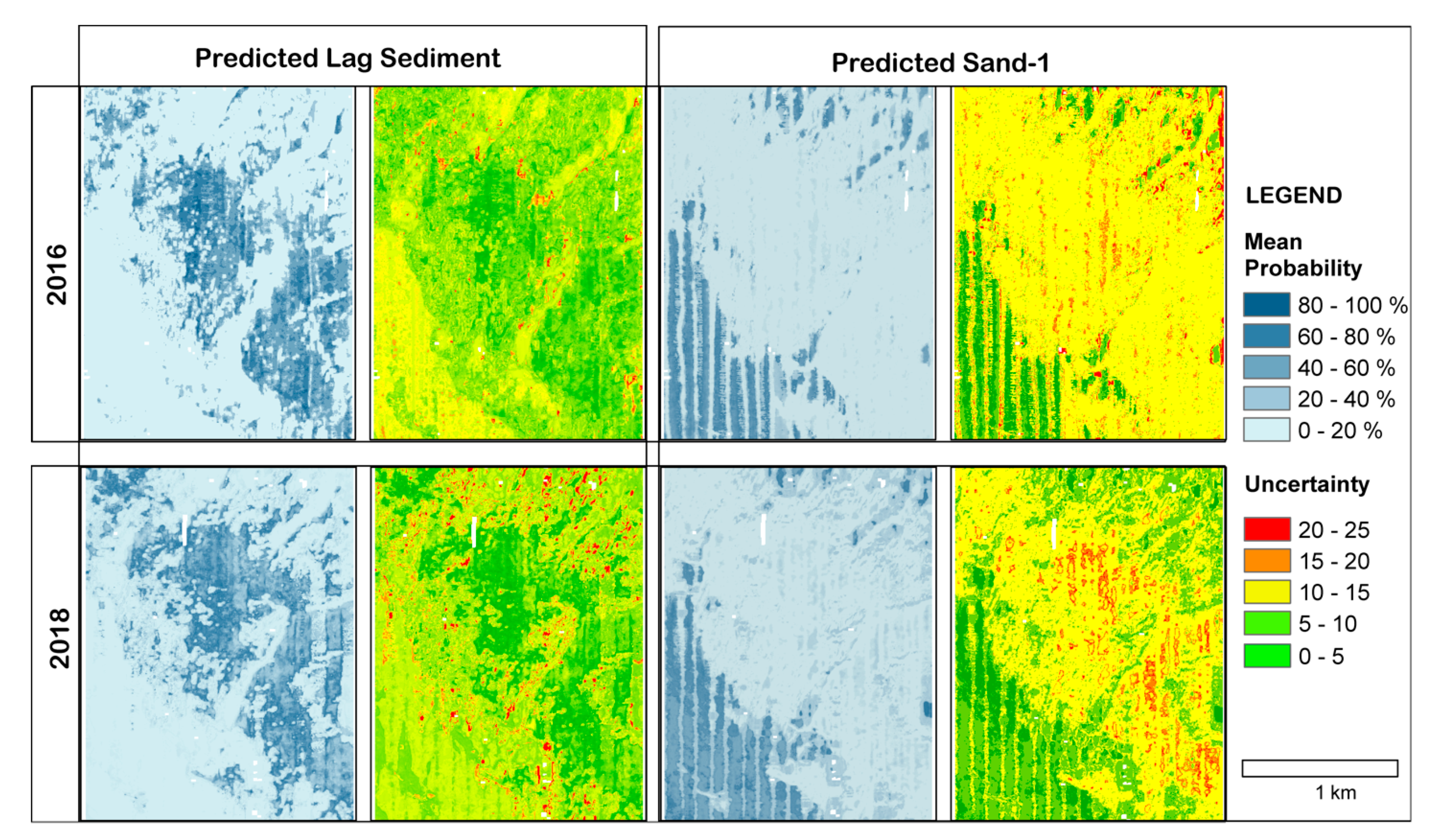
3.3.1. Predicted Sediment Distribution in 2016 and 2018
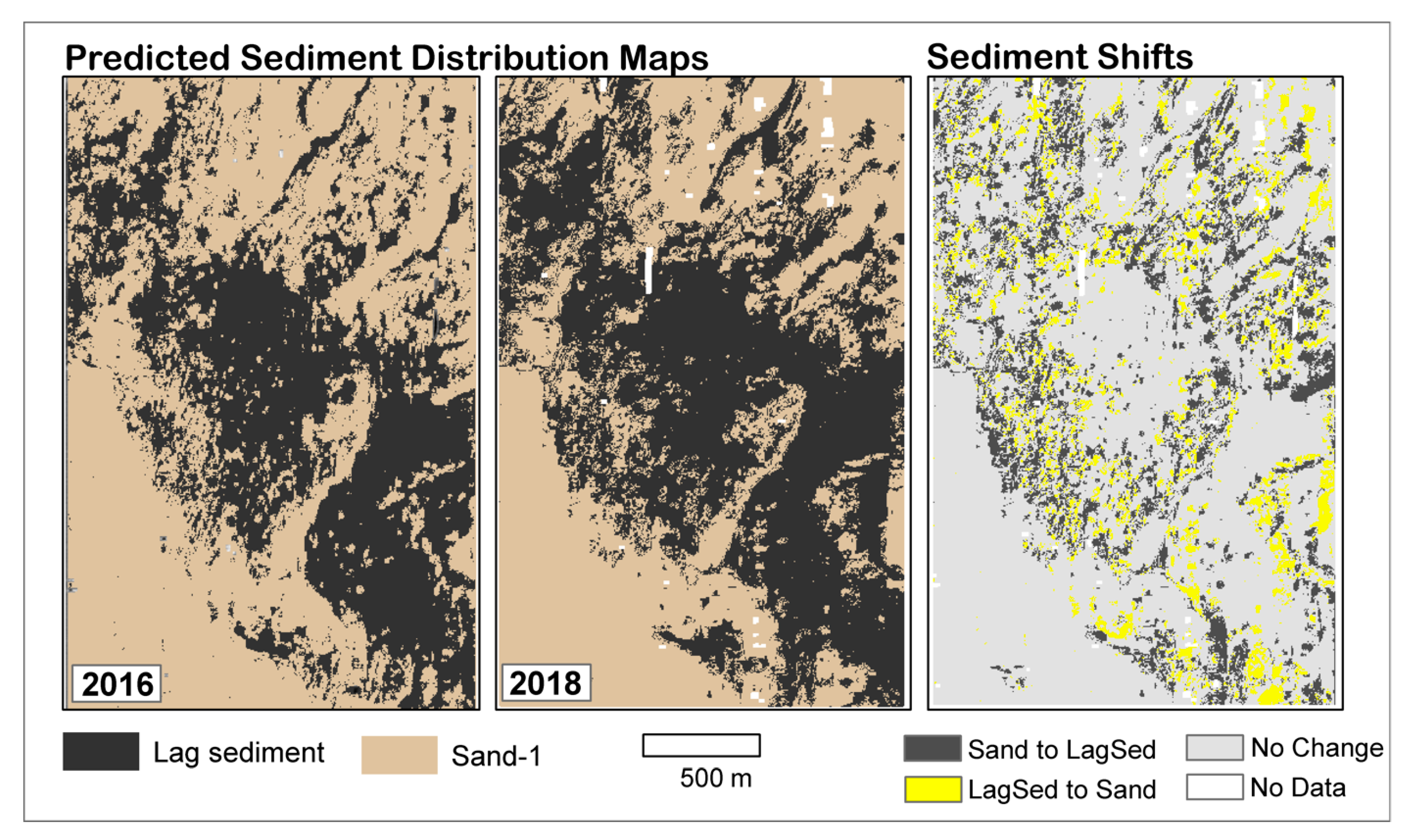
3.3.2. Seafloor Sediment Distribution Maps of H3
3.3.3. Changes in Seafloor Sediment Distribution Maps of H3
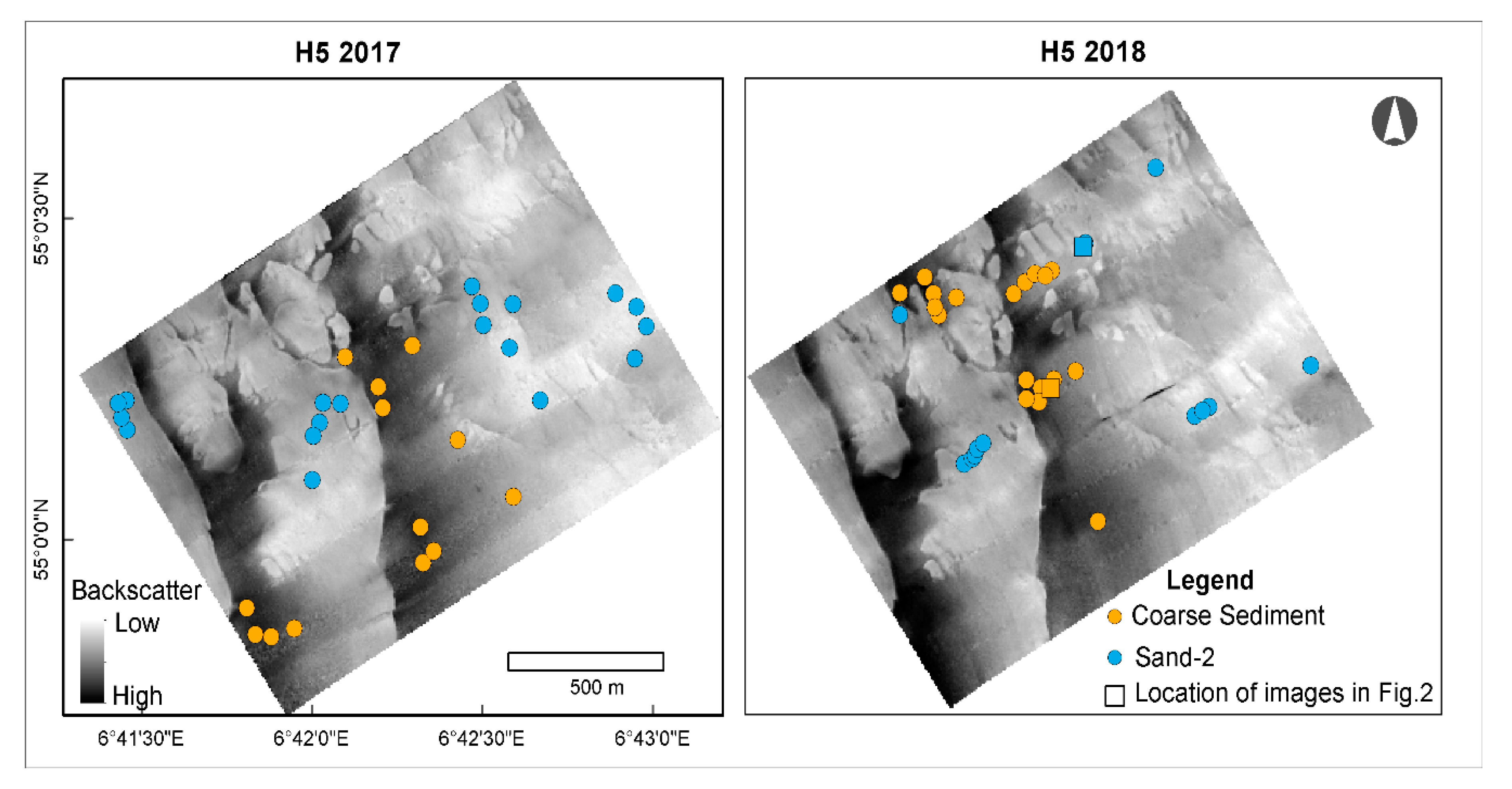
3.4. Seafloor Sediment Distribution in H5
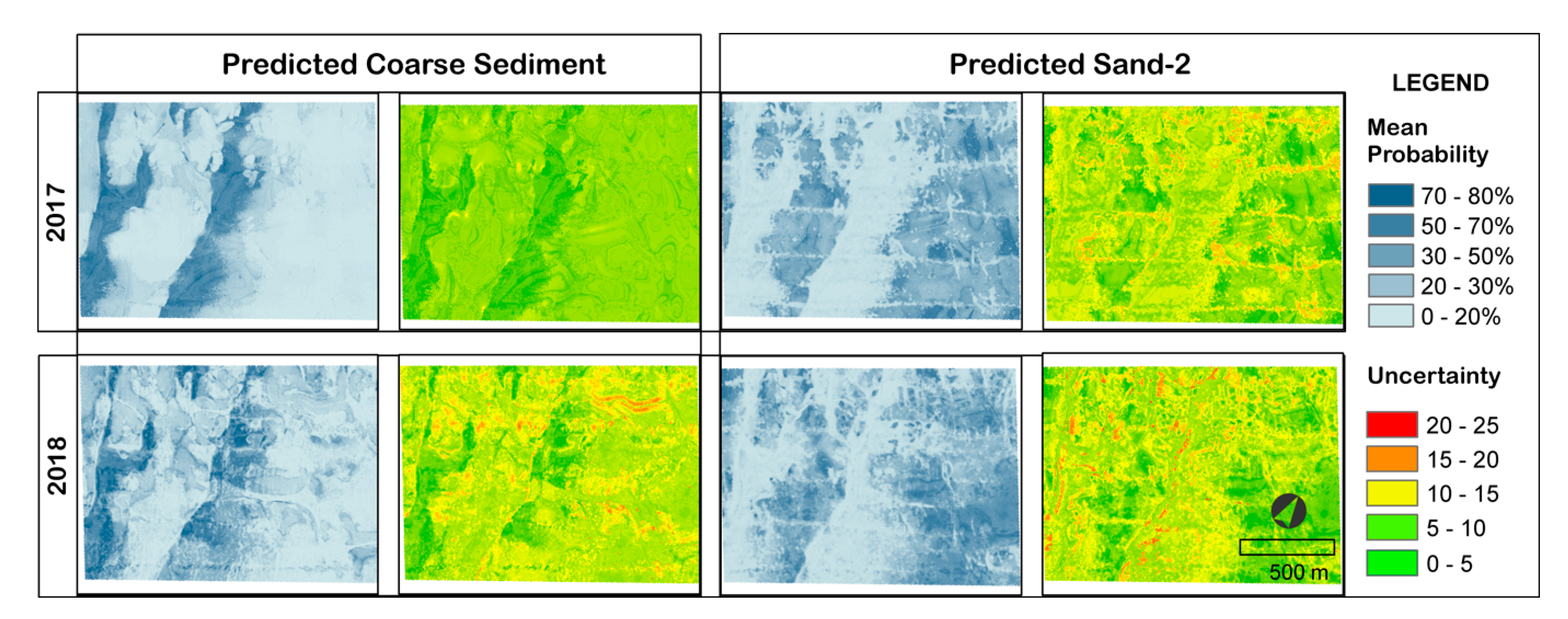
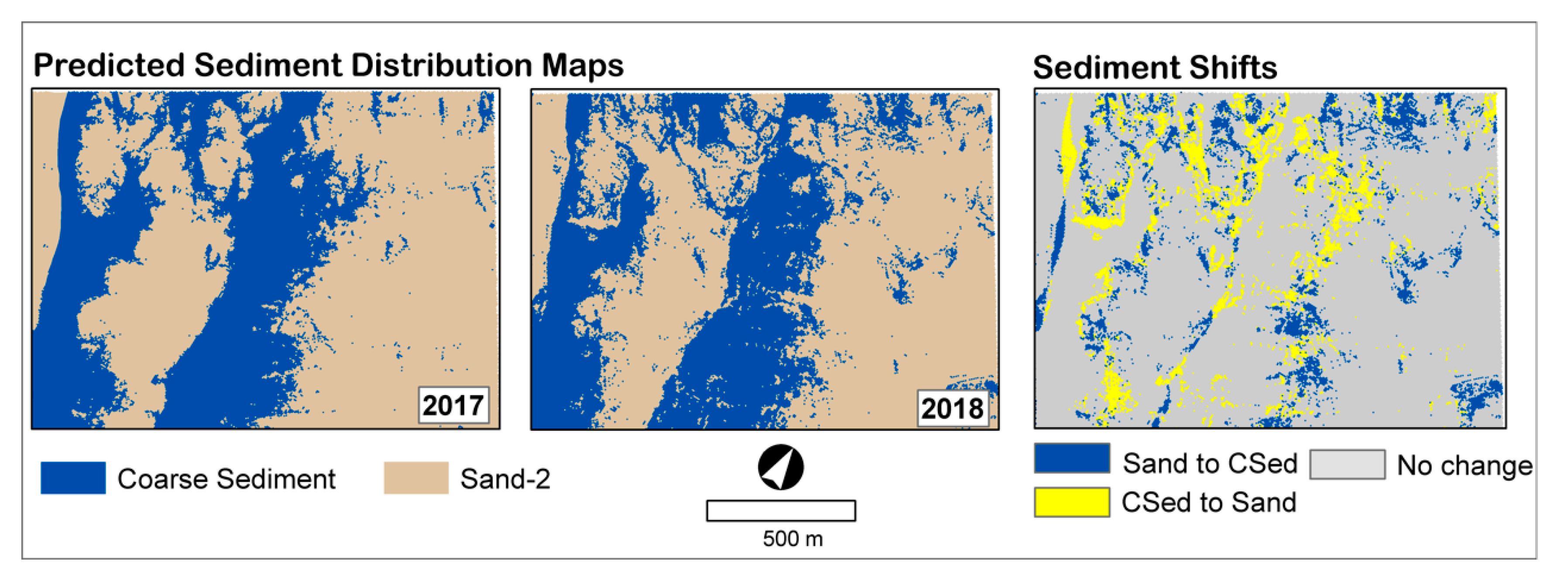
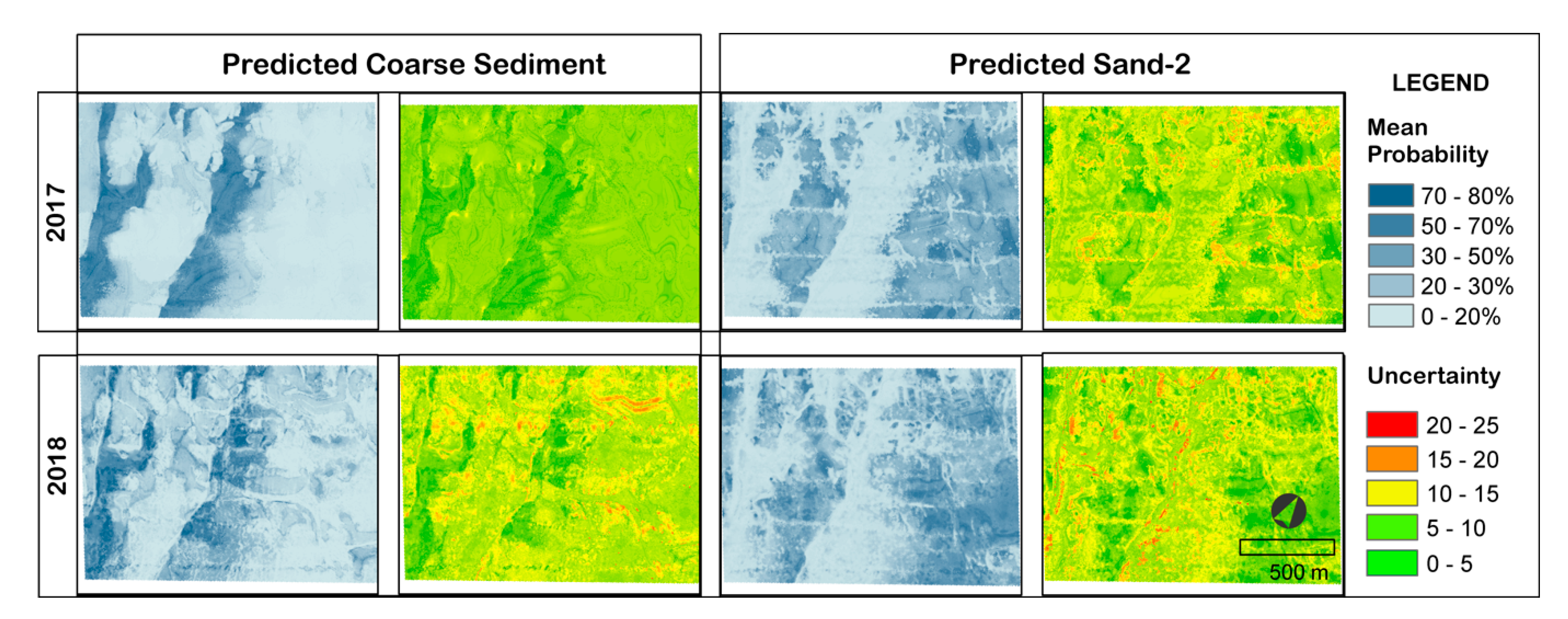
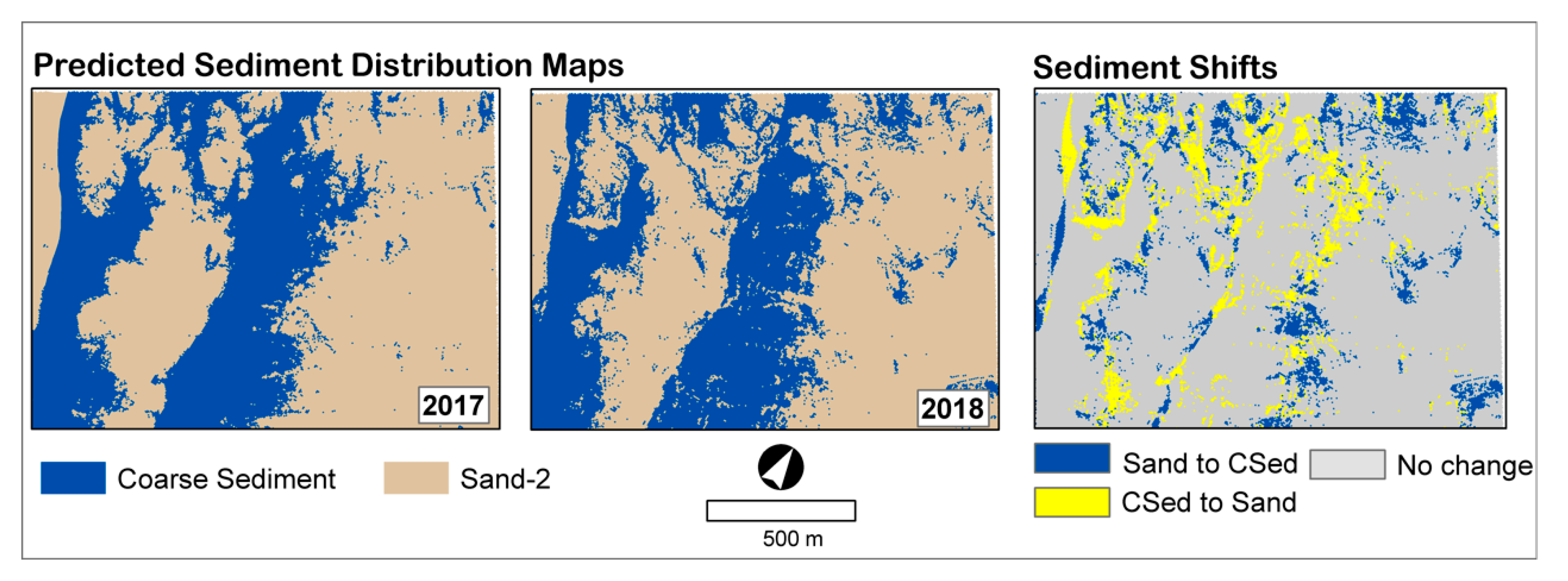
3.4.1. Predicted Sediment Distribution in 2017 and 2018
3.4.2. Seafloor Sediment Distribution Map of H5
3.4.3. Changes in Seafloor Sediment Distribution Maps of H5
4. Discussion
4.1. Predicting Seafloor Sediments with Limited Ground-Truth Samples
4.2. Seafloor Sediment Distribution in the Sylt Outer Reef from 2016 to 2018
4.3. Sediment Transitions and Their Implications
4.4. Outlook
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
- The raster for each sediment class was converted into integer format to allow raster analysis.
- Majority filter using the closest eight cells as a filter was run to join the small cells with the majority cells to reduce the noise in the raster.
- Using the cell statistics function of ArcGIS, the maximum value (highest probability %) of the input rasters (e.g., raster for all sediment classes in H3 in 2016) was computed. The output is the overlaid maximum scores of the sediment classes in one raster map (OverallMax).
- After generating the OverallMax, each original raster (i.e., majority filtered) was subtracted from the OverallMax raster, where 0 would be the cells with the max value in each. Two new rasters were created and called hereafter as ClassMax1 and ClassMax2.
- For each of the ClassMax rasters, the 0 values to 1 for ClassMax1 and 2 for ClassMax2 were set using the Con function in a raster calculator (e.g., Con (ClassMax1 = 0,1,0)). The result would be two new raster files with reclassified cell values: ClassCon 1 with the cells of maximum scores assigned as 1 and ClassCon2 with maximum scores assigned as 2. For example, the max scores of LagSed were assigned 1 and max scores of sand were assigned 2.
- Finally, the two ClassCon rasters were mosaicked to a new raster, where the cell value of the overlapping areas are the maximum value of the overlapping cells. The output is the ensemble map of the predictions of the two sediment classes, for which the most probable class was assigned to the location.
References
- Rousi, H.; Peltonen, H.; Mattila, J.; Bäck, S.; Bonsdorff, E. Impacts of Physical Environmental Characteristics on the Distribution of Benthic Fauna in the Northern Baltic Sea. Boreal Environ. Res. 2011, 16, 521–523. [Google Scholar]
- Rumohr, H. The Impact of Trawl Fishery on the Epifauna of the Southern North Sea. ICES J. Mar. Sci. 2000, 57, 1389–1394. [Google Scholar] [CrossRef] [Green Version]
- Thrush, S.; Hewitt, J.; Norkko, A.; Nicholls, P.; Funnell, G.; Ellis, J. Habitat Change in Estuaries: Predicting Broad-Scale Responses of Intertidal Macrofauna to Sediment Mud Content. Mar. Ecol. Prog. Ser. 2003, 263, 101–112. [Google Scholar] [CrossRef] [Green Version]
- Dernie, K.M.; Kaiser, M.J.; Richardson, E.A.; Warwick, R.M. Recovery of Soft Sediment Communities and Habitats Following Physical Disturbance. J. Exp. Mar. Biol. Ecol. 2003, 285–286, 415–434. [Google Scholar] [CrossRef]
- Burdon, F.J.; McIntosh, A.R.; Harding, J.S. Habitat Loss Drives Threshold Response of Benthic Invertebrate Communities to Deposited Sediment in Agricultural Streams. Ecol. Appl. 2013, 23, 1036–1047. [Google Scholar] [CrossRef]
- Bishop, M.J.; Coleman, M.A.; Kelaher, B.P. Cross-Habitat Impacts of Species Decline: Response of Estuarine Sediment Communities to Changing Detrital Resources. Oecologia 2010, 163, 517–525. [Google Scholar] [CrossRef]
- Heery, E.C.; Bishop, M.J.; Critchley, L.P.; Bugnot, A.B.; Airoldi, L.; Mayer-Pinto, M.; Sheehan, E.V.; Coleman, R.A.; Loke, L.H.L.; Johnston, E.L.; et al. Identifying the Consequences of Ocean Sprawl for Sedimentary Habitats. J. Exp. Mar. Biol. Ecol. 2017, 492, 31–48. [Google Scholar] [CrossRef]
- Yates, M.G.; Goss-Custard, J.D.; McGrorty, S.; Lakhani, K.H.; Durell, S.E.A.L.V.D.; Clarke, R.T.; Rispin, W.E.; Moy, I.; Yates, T.; Plant, R.A.; et al. Sediment Characteristics, Invertebrate Densities and Shorebird Densities on the Inner Banks of the Wash. J. Appl. Ecol. 1993, 30, 599–614. [Google Scholar] [CrossRef]
- Rijnsdorp, A.D.; Hiddink, J.G.; van Denderen, P.D.; Hintzen, N.T.; Eigaard, O.R.; Valanko, S.; Bastardie, F.; Bolam, S.G.; Boulcott, P.; Egekvist, J.; et al. Different Bottom Trawl Fisheries Have a Differential Impact on the Status of the North Sea Seafloor Habitats. ICES J. Mar. Sci. 2020, 77, 1772–1786. [Google Scholar] [CrossRef]
- Ierodiaconou, D.; Schimel, A.C.G.; Kennedy, D.; Monk, J.; Gaylard, G.; Young, M.; Diesing, M.; Rattray, A. Combining Pixel and Object Based Image Analysis of Ultra-High Resolution Multibeam Bathymetry and Backscatter for Habitat Mapping in Shallow Marine Waters. Mar. Geophys. Res. 2018, 39, 271–288. [Google Scholar] [CrossRef]
- Misiuk, B.; Diesing, M.; Aitken, A.; Brown, C.J.; Edinger, E.N.; Bell, T. A Spatially Explicit Comparison of Quantitative and Categorical Modelling Approaches for Mapping Seabed Sediments Using Random Forest. Geosciences 2019, 9, 254. [Google Scholar] [CrossRef] [Green Version]
- Menandro, P.S.; Bastos, A.C.; Boni, G.; Ferreira, L.C.; Vieira, F.V.; Lavagnino, A.C.; Moura, R.L.; Diesing, M. Reef Mapping Using Different Seabed Automatic Classification Tools. Geosciences 2020, 10, 72. [Google Scholar] [CrossRef] [Green Version]
- Brown, L.S.; Green, S.L.; Stewart, H.A.; Diesing, M.; Downie, A.-L.; Cooper, R.; Lillis, H. Semi-Automated Mapping of Rock in the Irish Sea, Minches, Western Scotland and Scottish Continental Shelf; JNCC: Peterborough, UK, 2017; p. 33. [Google Scholar]
- Diesing, M.; Green, S.L.; Stephens, D.; Lark, R.M.; Stewart, H.A.; Dove, D. Mapping Seabed Sediments: Comparison of Manual, Geostatistical, Object-Based Image Analysis and Machine Learning Approaches. Cont. Shelf Res. 2014, 84, 107–119. [Google Scholar] [CrossRef] [Green Version]
- Diesing, M. Deep-Sea Sediments of the Global Ocean. Earth Syst. Sci. Data 2020, 12, 3367–3381. [Google Scholar] [CrossRef]
- Pillay, T.; Cawthra, H.C.; Lombard, A.T. Characterisation of Seafloor Substrate Using Advanced Processing of Multibeam Bathymetry, Backscatter, and Sidescan Sonar in Table Bay, South Africa. Mar. Geol. 2020, 429, 106332. [Google Scholar] [CrossRef]
- Mitchell, P.J.; Aldridge, J.; Diesing, M. Legacy Data: How Decades of Seabed Sampling Can Produce Robust Predictions and Versatile Products. Geosciences 2019, 9, 182. [Google Scholar] [CrossRef] [Green Version]
- Kågesten, G.; Fiorentino, D.; Baumgartner, F.; Zillén, L. How Do Continuous High-Resolution Models of Patchy Seabed Habitats Enhance Classification Schemes? Geosciences 2019, 9, 237. [Google Scholar] [CrossRef] [Green Version]
- Zelada Leon, A.; Huvenne, V.A.I.; Benoist, N.M.A.; Ferguson, M.; Bett, B.J.; Wynn, R.B. Assessing the Repeatability of Automated Seafloor Classification Algorithms, with Application in Marine Protected Area Monitoring. Remote Sens. 2020, 12, 1572. [Google Scholar] [CrossRef]
- Janowski, L.; Madricardo, F.; Fogarin, S.; Kruss, A.; Molinaroli, E.; Kubowicz-Grajewska, A.; Tegowski, J. Spatial and Temporal Changes of Tidal Inlet Using Object-Based Image Analysis of Multibeam Echosounder Measurements: A Case from the Lagoon of Venice, Italy. Remote Sens. 2020, 12, 2117. [Google Scholar] [CrossRef]
- Diesing, M.; Stephens, D. A Multi-Model Ensemble Approach to Seabed Mapping. J. Sea Res. 2015, 100, 62–69. [Google Scholar] [CrossRef]
- Turner, J.A.; Babcock, R.C.; Hovey, R.; Kendrick, G.A. Can Single Classifiers Be as Useful as Model Ensembles to Produce Benthic Seabed Substratum Maps? Estuar. Coast. Shelf Sci. 2018, 204, 149–163. [Google Scholar] [CrossRef]
- Araujo, M.; New, M. Ensemble Forecasting of Species Distributions. Trends Ecol. Evol. 2007, 22, 42–47. [Google Scholar] [CrossRef]
- Thuiller, W.; Lafourcade, B.; Engler, R.; Araújo, M.B. BIOMOD-A Platform for Ensemble Forecasting of Species Distributions. Ecography 2009, 32, 369–373. [Google Scholar] [CrossRef]
- Guisan, A.; Thuiller, W.; Zimmermann, N.E. Habitat Suitability and Distribution Models: With Applications in R; Cambridge University Press: Cambridge, UK, 2017; ISBN 978-1-139-02827-1. [Google Scholar]
- Pearman, T.R.R.; Robert, K.; Callaway, A.; Hall, R.; Lo Iacono, C.; Huvenne, V.A.I. Improving the Predictive Capability of Benthic Species Distribution Models by Incorporating Oceanographic Data–Towards Holistic Ecological Modelling of a Submarine Canyon. Prog. Oceanogr. 2020, 184, 102338. [Google Scholar] [CrossRef]
- Georgian, S.E.; Anderson, O.F.; Rowden, A.A. Ensemble Habitat Suitability Modeling of Vulnerable Marine Ecosystem Indicator Taxa to Inform Deep-Sea Fisheries Management in the South Pacific Ocean. Fish. Res. 2019, 211, 256–274. [Google Scholar] [CrossRef]
- Robert, K.; Jones, D.O.B.; Roberts, J.M.; Huvenne, V.A.I. Improving Predictive Mapping of Deep-Water Habitats: Considering Multiple Model Outputs and Ensemble Techniques. Deep Sea Res. Part. I: Oceanogr. Res. Pap. 2016, 113, 80–89. [Google Scholar] [CrossRef]
- Rahman, A. Benthic Habitat Mapping from Seabed Images Using Ensemble of Color, Texture, and Edge Features. Int. J. Comput. Intell. Syst. 2013, 6, 1072–1081. [Google Scholar] [CrossRef] [Green Version]
- Diesing, M.; Mitchell, P.J.; O’Keeffe, E.; Gavazzi, G.O.A.M.; Bas, T.L. Limitations of Predicting Substrate Classes on a Sedimentary Complex but Morphologically Simple Seabed. Remote Sens. 2020, 12, 3398. [Google Scholar] [CrossRef]
- Downie, A.L.; Dove, D.; Westhead, K.; Diesing, M.; Green, S.L.; Cooper, R. Semi-Automated Mapping of Rock in the North Sea; JNCC Report No. 592.; Joint Nature Conservation Committee: Peterborough, UK, 2016. [Google Scholar]
- Diesing, M.; Mitchell, P.; Stephens, D. Image-Based Seabed Classification: What Can We Learn from Terrestrial Remote Sensing? ICES J. Mar. Sci. 2016, 73, 2425–2441. [Google Scholar] [CrossRef]
- Zou, Q.; Xie, S.; Lin, Z.; Wu, M.; Ju, Y. Finding the Best Classification Threshold in Imbalanced Classification. Big Data Res. 2016, 5, 2–8. [Google Scholar] [CrossRef]
- Wang, C.Y.; Hu, L.L.; Guo, M.Z.; Liu, X.Y.; Zou, Q. ImDC: An Ensemble Learning Method for Imbalanced Classification with MiRNA Data. Genet. Mol. Res. 2015, 14, 123–133. [Google Scholar] [CrossRef]
- López, V.; Fernández, A.; Moreno-Torres, J.G.; Herrera, F. Analysis of Preprocessing vs. Cost-Sensitive Learning for Imbalanced Classification. Open Problems on Intrinsic Data Characteristics. Expert Syst. Appl. 2012, 39, 6585–6608. [Google Scholar] [CrossRef]
- BSH. Guideline for Seafloor Mapping in German Marine Waters Using High-Resolution Sonars; BSH No. 7201; Federal Maritime and Hydrographic Agency (BSH): Hamburg, Germany; Rostock, Germany, 2016; p. 147. [Google Scholar]
- Papenmeier, S.; Hass, H.C.; Propp, C.; Thiesen, M.; Zeiler, M. Map of Sediment Distribution in the German EEZ (1:10.000). 2019. Available online: www.geoseaportal.de (accessed on 10 April 2021).
- Michaelis, R.; Hass, H.C.; Mielck, F.; Papenmeier, S.; Sander, L.; Ebbe, B.; Gutow, L.; Wiltshire, K.H. Hard-Substrate Habitats in the German Bight (South-Eastern North Sea) Observed Using Drift Videos. J. Sea Res. 2019, 144, 78–84. [Google Scholar] [CrossRef]
- Diesing, M.; Kubicki, A.; Winter, C.; Schwarzer, K. Decadal Scale Stability of Sorted Bedforms, German Bight, Southeastern North Sea. Cont. Shelf Res. 2006, 26, 902–916. [Google Scholar] [CrossRef]
- Galvez, D.S.; Papenmeier, S.; Hass, H.C.; Bartholomae, A.; Fofonova, V.; Wiltshire, K.H. Detecting Shifts of Submarine Sediment Boundaries Using Side-Scan Mosaics and GIS Analyses. Mar. Geol. 2020, 430, 106343. [Google Scholar] [CrossRef]
- Port, A.; Gurgel, K.-W.; Staneva, J.; Schulz-Stellenfleth, J.; Stanev, E.V. Tidal and Wind-Driven Surface Currents in the German Bight: HFR Observations versus Model Simulations. Ocean. Dyn. 2011, 61, 1567–1585. [Google Scholar] [CrossRef]
- Callies, U.; Gaslikova, L.; Kapitza, H.; Scharfe, M. German Bight Residual Current Variability on a Daily Basis: Principal Components of Multi-Decadal Barotropic Simulations. Geo-Mar. Lett 2017, 37, 151–162. [Google Scholar] [CrossRef] [Green Version]
- Papenmeier, S.; Hass, H. Detection of Stones in Marine Habitats Combining Simultaneous Hydroacoustic Surveys. Geosciences 2018, 8, 279. [Google Scholar] [CrossRef] [Green Version]
- Papenmeier, S.; Hass, H.C. Revisiting the Paleo Elbe Valley: Reconstruction of the Holocene, Sedimentary Development on Basis of High-Resolution Grain Size Data and Shallow Seismics. Geosciences 2020, 10, 505. [Google Scholar] [CrossRef]
- Kongsberg Maritime, A. Instruction Manual EM Series Multibeam Echo Sounders.Datagram Formats. 2018. Available online: https://www.kongsberg.com/globalassets/maritime/km-products/product-documents/160692_em_datagram_formats.pdf. (accessed on 1 February 2021).
- Hass, H.C.; Kuhn, G.; Monien, P.; Brumsack, H. Climate Fluctuations during the Past Two Millennia as Recorded in Sediments from Maxwell Bay, South Shetland Islands, West Antarctica. Geol. Soc. Lond. Spec. Publ. 2010, 344, 243–260. [Google Scholar] [CrossRef]
- Blott, S.J.; Pye, K. GRADISTAT: A Grain Size Distribution and Statistics Package for the Analysis of Unconsolidated Sediments. Earth Surf. Process. Landf. 2001, 26, 1237–1248. [Google Scholar] [CrossRef]
- Folk, R.L.; Ward, W.C. Brazos River Bar [Texas]; a Study in the Significance of Grain Size Parameters. J. Sediment. Res. 1957, 27, 3–26. [Google Scholar] [CrossRef]
- R Core Team. R: A language and environment for statistical computing. R Foundation for Statistical Computing, Vienna, Austria. 2020. Available online: http://www.r-project.org/index.html (accessed on 10 December 2020).
- Jerosch, K.; Scharf, F.K.; Deregibus, D.; Campana, G.L.; Zacher, K.; Pehlke, H.; Falk, U.; Hass, H.C.; Quartino, M.L.; Abele, D. Ensemble Modeling of Antarctic Macroalgal Habitats Exposed to Glacial Melt in a Polar Fjord. Front. Ecol. Evol. 2019, 7, 207. [Google Scholar] [CrossRef] [Green Version]
- Kaky, E.; Nolan, V.; Alatawi, A.; Gilbert, F. A Comparison between Ensemble and MaxEnt Species Distribution Modelling Approaches for Conservation: A Case Study with Egyptian Medicinal Plants. Ecol. Inform. 2020, 60, 101150. [Google Scholar] [CrossRef]
- Austin, R.A.; Hawkes, L.A.; Doherty, P.D.; Henderson, S.M.; Inger, R.; Johnson, L.; Pikesley, S.K.; Solandt, J.-L.; Speedie, C.; Witt, M.J. Predicting Habitat Suitability for Basking Sharks (Cetorhinus Maximus) in UK Waters Using Ensemble Ecological Niche Modelling. J. Sea Res. 2019, 153, 101767. [Google Scholar] [CrossRef]
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees. Biometrics 1984, 40, 874. [Google Scholar] [CrossRef] [Green Version]
- Sillero, N.; Barbosa, A.M. Common Mistakes in Ecological Niche Models. Int. J. Geogr. Inf. Sci. 2021, 35, 213–226. [Google Scholar] [CrossRef]
- Barbet-Massin, M.; Jiguet, F.; Albert, C.H.; Thuiller, W. Selecting Pseudo-Absences for Species Distribution Models: How, Where and How Many? How Use Pseudo-Absences Niche Model? Methods Ecol. Evol. 2012, 3, 327–338. [Google Scholar] [CrossRef]
- Walbridge, S.; Slocum, N.; Pobuda, M. Dawn Wright Unified Geomorphological Analysis Workflows with Benthic Terrain Modeler. Geosciences 2018, 8, 94. [Google Scholar] [CrossRef] [Green Version]
- Androsov, A.; Fofonova, V.; Kuznetsov, I.; Danilov, S.; Rakowsky, N.; Harig, S.; Brix, H.; Wiltshire, K.H. FESOM-C v.2: Coastal Dynamics on Hybrid Unstructured Meshes. Geosci. Model. Dev. 2019, 12, 1009–1028. [Google Scholar] [CrossRef] [Green Version]
- Fofonova, V.; Androsov, A.; Sander, L.; Kuznetsov, I.; Amorim, F.; Hass, H.C.; Wiltshire, K.H. Non-Linear Aspects of the Tidal Dynamics in the Sylt-Rømø Bight, South-Eastern North Sea. Ocean. Sci. 2019, 15, 1761–1782. [Google Scholar] [CrossRef] [Green Version]
- Kuznetsov, I.; Androsov, A.; Fofonova, V.; Danilov, S.; Rakowsky, N.; Harig, S.; Wiltshire, K.H. Evaluation and Application of Newly Designed Finite Volume Coastal Model FESOM-C, Effect of Variable Resolution in the Southeastern North Sea. Water 2020, 12, 1412. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I. Textural Features for Image Classification. IEEE Trans. Syst. ManCybern. 1973, SMC-3, 610–621. [Google Scholar] [CrossRef] [Green Version]
- Baron, J.; Hill, D.J. Monitoring Grassland Invasion by Spotted Knapweed (Centaurea Maculosa) with RPAS-Acquired Multispectral Imagery. Remote Sens. Environ. 2020, 249, 112008. [Google Scholar] [CrossRef]
- Breiner, F.T.; Guisan, A.; Bergamini, A.; Nobis, M.P. Overcoming Limitations of Modelling Rare Species by Using Ensembles of Small Models. Methods Ecol. Evol. 2015, 6, 1210–1218. [Google Scholar] [CrossRef]
- Naimi, B.; Araújo, M.B. Sdm: A Reproducible and Extensible R Platform for Species Distribution Modelling. Ecography 2016, 39, 368–375. [Google Scholar] [CrossRef] [Green Version]
- Harell, F.E.; Lee, K.L.; Mark, D.B. Multivariable Prognostic Models: Issues in Developing Models, Evaluating Assumptions and Adequacy, and Measuring and Reducing Errors. Stat. Med. 1996, 15, 361–387. [Google Scholar] [CrossRef]
- Chatterjee, S.; Hadi, A.S. Regression Analysis by Example, 4th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2006. [Google Scholar]
- Naimi, B.; Hamm, N.A.S.; Groen, T.A.; Skidmore, A.K.; Toxopeus, A.G. Where Is Positional Uncertainty a Problem for Species Distribution Modelling? Ecography 2014, 37, 191–203. [Google Scholar] [CrossRef]
- Cohen, J. A Coefficient of Agreement for Nominal Scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Thuiller, W.; Lafourcade, B.; Araujo, M. Presentation Manual for BIOMOD 2010. Available online: https://www.semanticscholar.org/paper/Presentation-Manual-for-BIOMOD-Lafourcade-Araujo/55222d3a8501206807a9a0a32a2b7e62260f53af (accessed on 10 May 2021).
- Kuhn, M. Building Predictive Models in R Using the Caret Package. J. Stat. Software 2008, 28, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Foody, G.M. Explaining the Unsuitability of the Kappa Coefficient in the Assessment and Comparison of the Accuracy of Thematic Maps Obtained by Image Classification. Remote Sens. Environ. 2020, 239, 111630. [Google Scholar] [CrossRef]
- Rattray, A.; Ierodiaconou, D.; Monk, J.; Versace, V.; Laurenson, L. Detecting Patterns of Change in Benthic Habitats by Acoustic Remote Sensing. Mar. Ecol. Prog. Ser. 2013, 477, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Pontius, R.G.; Shusas, E.; McEachern, M. Detecting Important Categorical Land Changes While Accounting for Persistence. Agric. Ecosyst. Environ. 2004, 101, 251–268. [Google Scholar] [CrossRef]
- Braimoh, A.K. Random and Systematic Land-Cover Transitions in Northern Ghana. Agric. Ecosyst. Environ. 2006, 113, 254–263. [Google Scholar] [CrossRef]
- Montereale-Gavazzi, G.; Roche, M.; Lurton, X.; Degrendele, K.; Terseleer, N.; Van Lancker, V. Seafloor Change Detection Using Multibeam Echosounder Backscatter: Case Study on the Belgian Part of the North Sea. Mar. Geophys Res. 2018, 39, 229–247. [Google Scholar] [CrossRef]
- Randin, C.F.; Dirnbock, T.; Dullinger, S. Are Niche-Based Species Distribution Models Transferable in Space? J. Biogeogr. 2006, 33, 1689–1703. [Google Scholar] [CrossRef]
- Eriksson, B.K.; van der Heide, T.; van de Koppel, J.; Piersma, T.; van der Veer, H.W.; Olff, H. Major Changes in the Ecology of the Wadden Sea: Human Impacts, Ecosystem Engineering and Sediment Dynamics. Ecosystems 2010, 13, 752–764. [Google Scholar] [CrossRef] [Green Version]
- van Overmeeren, R.; Craeymeersch, J.; van Dalfsen, J.; Fey, F.; van Heteren, S.; Meesters, E. Acoustic Habitat and Shellfish Mapping and Monitoring in Shallow Coastal Water–Sidescan Sonar Experiences in The Netherlands. Estuar. Coast. Shelf Sci. 2009, 85, 437–448. [Google Scholar] [CrossRef]
- Rosenberger, K.J. Morphodynamics of a Field of Crescent-Shaped Rippled Scour; Depressions Northern Monterey Bay, CA. Mar. Geol. 2019, 407, 44–59. [Google Scholar] [CrossRef]
- Murray, A.B.; Thieler, E.R. A New Hypothesis and Exploratory Model for the Formation of Large-Scale Inner-Shelf Sediment Sorting and “Rippled Scour Depressions”. Cont. Shelf Res. 2004, 24, 295–315. [Google Scholar] [CrossRef]
- Mielck, F.; Holler, P.; Bürk, D.; Hass, H.C. Interannual Variability of Sorted Bedforms in the Coastal German Bight (SE North Sea). Cont. Shelf Res. 2015, 111, 31–41. [Google Scholar] [CrossRef]
- Lurton, X. An Introduction to Underwater Acoustics: Principles and Applications, 2nd ed.; Springer Praxis Books & Praxis Publishing: Chichester, UK, 2010. [Google Scholar]
- Lurton, X.; Lamarche, G. Chapter 1-Introduction to Backscatter Measurements by Seafloor-Mapping Sonars. In Backscatter Measurements by Seafloor-Mapping Sonars-Guidelines and Recommendations; Lurton, X., Lamarche, G., Eds.; 2015; pp. 11–23. [Google Scholar]
- Anthony, D.; Leth, J.O. Large-Scale Bedforms, Sediment Distribution and Sand Mobility in the Eastern North Sea O¡ the Danish West Coast. Mar. Geol. 2002, 182, 247–263. [Google Scholar] [CrossRef]
- Montereale-Gavazzi, G.; Roche, M.; Degrendele, K.; Lurton, X.; Terseleer, N.; Baeye, M.; Francken, F.; Lancker, V.V. Insights into the Short-Term Tidal Variability of Multibeam Backscatter from Field Experiments on Different Seafloor Types. Geosciences 2019, 9, 34. [Google Scholar] [CrossRef]
- Michaelis, R. Epibenthic Assemblages of Hard-Substrate Habitats in the German Bight (South-Eastern North Sea) Described Using Drift Videos. Cont. Shelf Res. 2019, 175, 30–41. [Google Scholar] [CrossRef]
- Biernbaum, C.K. Influence of Sedimentary Factors on the Distribution of Benthic Amphipods of Fishers Island Sound, Connecticut. J. Exp. Mar. Biol. Ecol. 1979, 38, 201–223. [Google Scholar] [CrossRef]
- Gogina, M.; Zettler, M.L. Diversity and Distribution of Benthic Macrofauna in the Baltic Sea. J. Sea Res. 2010, 64, 313–321. [Google Scholar] [CrossRef]
- Bruns, I.; Holler, P.; Capperucci, R.M.; Papenmeier, S.; Bartholomä, A. Identifying Trawl Marks in North Sea Sediments. Geosciences 2020, 10, 422. [Google Scholar] [CrossRef]
- Trzcinska, K.; Janowski, L.; Nowak, J.; Rucinska-Zjadacz, M.; Kruss, A.; von Deimling, J.S.; Pocwiardowski, P.; Tegowski, J. Spectral Features of Dual-Frequency Multibeam Echosounder Data for Benthic Habitat Mapping. Mar. Geol. 2020, 427, 106239. [Google Scholar] [CrossRef]
- Lecours, V.; Dolan, M.F.J.; Micallef, A.; Lucieer, V.L. A Review of Marine Geomorphometry, the Quantitative Study of the Seafloor. Hydrol. Earth Syst. Sci. 2016, 20, 3207–3244. [Google Scholar] [CrossRef] [Green Version]
- Che Hasan, R.; Ierodiaconou, D.; Laurenson, L.; Schimel, A. Integrating Multibeam Backscatter Angular Response, Mosaic and Bathymetry Data for Benthic Habitat Mapping. PLoS ONE 2014, 9, e97339. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Janowski, L.; Kubacka, M.; Pydyn, A.; Popek, M.; Gajewski, L. From Acoustics to Underwater Archaeology: Deep Investigation of a Shallow Lake Using High-resolution Hydroacoustics—The Case of Lake Lednica, Poland. Archaeometry 2021, 12663. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Survey Code | Date | Survey Area | Data Collected |
|---|---|---|---|
| HE 474 | 12–20 Oct 2016 | H3 | Backscatter, bathymetry, sediment, and video samples |
| HE 501 | 15–28 Nov 2017 | H5 | Backscatter, bathymetry, sediment, and video samples |
| HE 505 | 13–20 Mar 2018 | H3 and H5 | Backscatter, bathymetry, sediment, and video samples |
| Level A | Level B | Level C |
|---|---|---|
| Fine sediment (FSed) | not specified * | not classified ** |
| mud (M) | not classified | |
| sandy mud (sM) | ||
| muddy Sand (mS) | ||
| Sand (S) | sand (S) | |
| fine sand (fSa) | ||
| medium sand (mSa) | ||
| mixed sand (mxSa) | ||
| coarse sand (cSa) | ||
| Coarse sediment (CSed) | not specified | not classified |
| gravelly sand (gS) | ||
| sand gravel (sG) | ||
| gravel (G) | ||
| Mixed sediments (MXSed) | not specified | not classified |
| gravelly mud (gM) | ||
| gravelly muddy sand (gmS) | ||
| muddy sandy gravel (msG) | ||
| muddy gravel (mG) | ||
| Lag sediment (LagSed) | not classified | not classified |
| not specified | not specified | not specified |
| Study Area | Sediment Class * | Field Survey | Data Type | Georeference Quality | Number of Samples |
|---|---|---|---|---|---|
| H3 | |||||
| Lag sediment (LagSed) | 2016 | grab sample, videos, and photographs | DGPS | 14 | |
| 2018 | grab sample, videos, and photographs | DGPS | 58 | ||
| Sand low backscatter (SLBS) | 2016 | grab sample, videos, and photographs | DGPS | 13 | |
| 2018 | grab sample, videos, and photographs | DGPS | 21 | ||
| H5 | Coarse sediment (Csed) | 2017 | grab sample, videos, and photographs | DGPS | 13 |
| 2018 | grab sample, videos, and photographs | DGPS | 18 | ||
| Sand high backscatter (SHBS) | 2017 | grab sample, videos, and photographs | DGPS | 19 | |
| 2018 | grab sample, videos, and photographs | DGPS | 26 | ||
| Total presence data | 2016–2018 | point data | DGPS | 182 | |
| Study Area and Year | Sediment Class * | Total Number of Models Built | Total Number of Models Kept in the Ensemble Model |
|---|---|---|---|
| H3 | 2016 LagSed | 240 | 92 |
| 2016 SLBS | 240 | 168 | |
| 2018 LagSed | 240 | 113 | |
| 2018 SLBS | 240 | 143 | |
| H5 | 2017 CSed | 240 | 99 |
| 2017 SHBS | 240 | 20 | |
| 2018 CSed | 240 | 56 | |
| 2018 SHBS | 240 | 39 |
| Study Area | Date and Sediment Class | TSS | ROC | Kappa |
|---|---|---|---|---|
| H3 | 2016 LagSed | 0.91 | 0.98 | 0.63 |
| 2016 SHBS | 0.90 | 0.98 | 0.66 | |
| 2018 LagSed | 0.91 | 0.99 | 0.90 | |
| 2018 SHBS | 0.85 | 0.98 | 0.72 | |
| H5 | 2017 CSed | 0.82 | 0.95 | 0.61 |
| 2017 SLBS | 0.90 | 0.97 | 0.49 | |
| 2018 CSed | 0.86 | 0.96 | 0.40 | |
| 2018 SLBS | 0.83 | 0.97 | 0.60 |
| Study Area | Date | Overall Accuracy |
|---|---|---|
| H3 | 2016 | 1.00 |
| 2018 | 1.00 | |
| H5 | 2017 | 0.94 |
| 2018 | 0.86 |
| H3 | 2016 | 2018 | Gain | Loss | Persistence |
| LagSed | 1.92 km2 (41%) | 2.32 km2 (49 %) | 0.76 km2 (16%) | 0.37 km2 (8%) | 1.55 km2 (33%) |
| SLBS | 2.78 km2 (59%) | 2.39 km2 (51%) | 0.37 km2 (8%) | 0.76 km2 (16%) | 2.03 km2 (43%) |
| Total | 1.36 km2 (24%) | 1.36 km2 (24%) | 3.58 km2 (76%) | ||
| H5 | 2017 | 2018 | |||
| Csed | 0.67 km2 (37%) | 0.67 km2 (37.2%) | 0.16 km2 (8.72%) | 0.16 km2 (8.68 %) | 0.52 km2 (29%) |
| SHBS | 1.13 km2 (62.8%) | 1.14 km2 (62.9%) | 0.16 km2 (8.68 %) | 0.16 km2 (8.72%) | 0.98 km2 (54%) |
| Total | 0.32 km2 (17.4%) | 0.32 km2 (17.4%) | 1.5 km2 (83%) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Galvez, D.S.; Papenmeier, S.; Sander, L.; Hass, H.C.; Fofonova, V.; Bartholomä, A.; Wiltshire, K.H. Ensemble Mapping and Change Analysis of the Seafloor Sediment Distribution in the Sylt Outer Reef, German North Sea from 2016 to 2018. Water 2021, 13, 2254. https://doi.org/10.3390/w13162254
Galvez DS, Papenmeier S, Sander L, Hass HC, Fofonova V, Bartholomä A, Wiltshire KH. Ensemble Mapping and Change Analysis of the Seafloor Sediment Distribution in the Sylt Outer Reef, German North Sea from 2016 to 2018. Water. 2021; 13(16):2254. https://doi.org/10.3390/w13162254
Chicago/Turabian StyleGalvez, Daphnie S., Svenja Papenmeier, Lasse Sander, H. Christian Hass, Vera Fofonova, Alexander Bartholomä, and Karen Helen Wiltshire. 2021. "Ensemble Mapping and Change Analysis of the Seafloor Sediment Distribution in the Sylt Outer Reef, German North Sea from 2016 to 2018" Water 13, no. 16: 2254. https://doi.org/10.3390/w13162254
APA StyleGalvez, D. S., Papenmeier, S., Sander, L., Hass, H. C., Fofonova, V., Bartholomä, A., & Wiltshire, K. H. (2021). Ensemble Mapping and Change Analysis of the Seafloor Sediment Distribution in the Sylt Outer Reef, German North Sea from 2016 to 2018. Water, 13(16), 2254. https://doi.org/10.3390/w13162254