
Hybrid Approach of Unmanned Aerial Vehicle and Unmanned Surface Vehicle for Assessment of Chlorophyll-a Imagery Using Spectral Indices in Stream, South Korea


Abstract
:1. Introduction
2. Materials and Methods
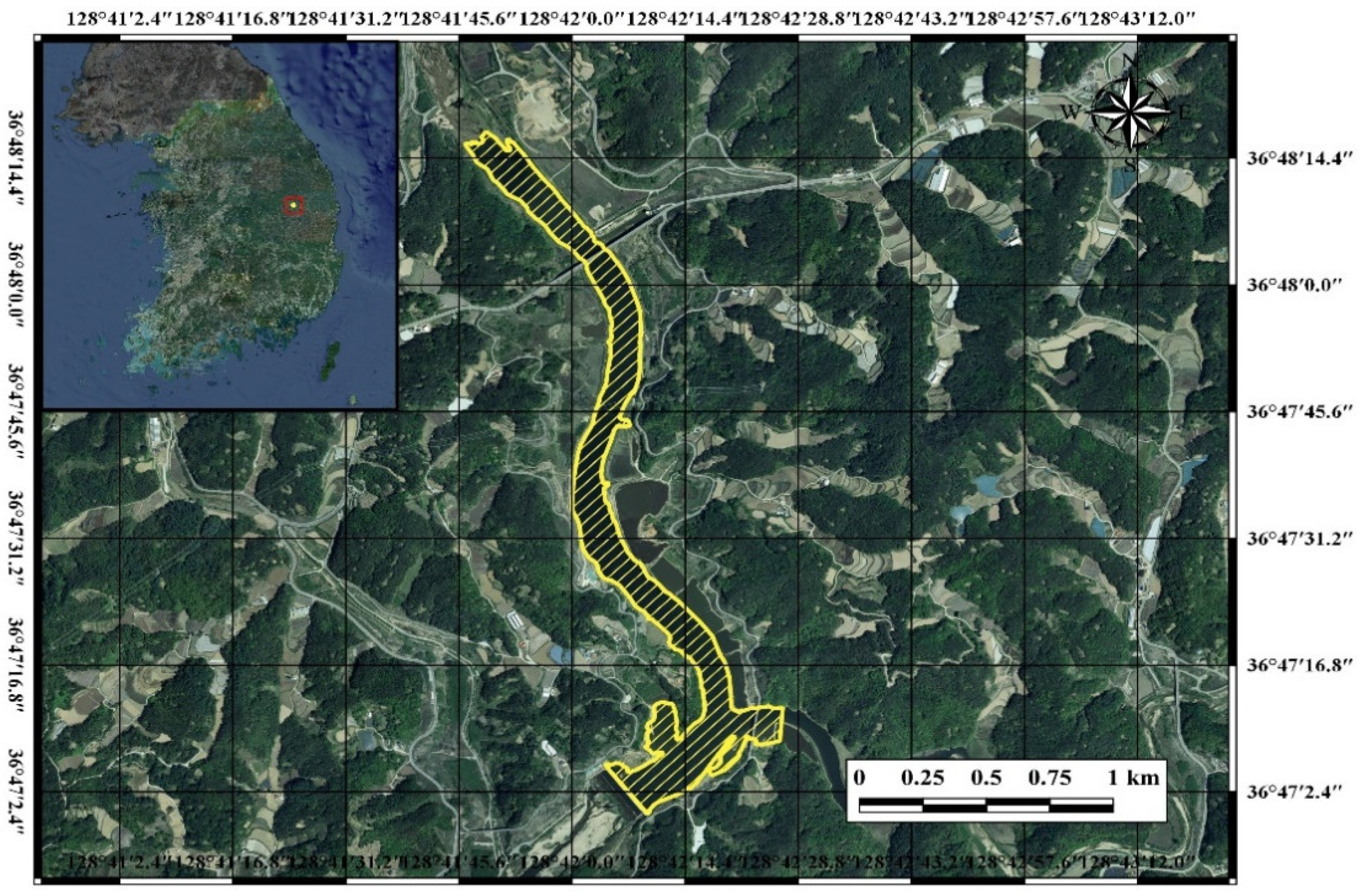
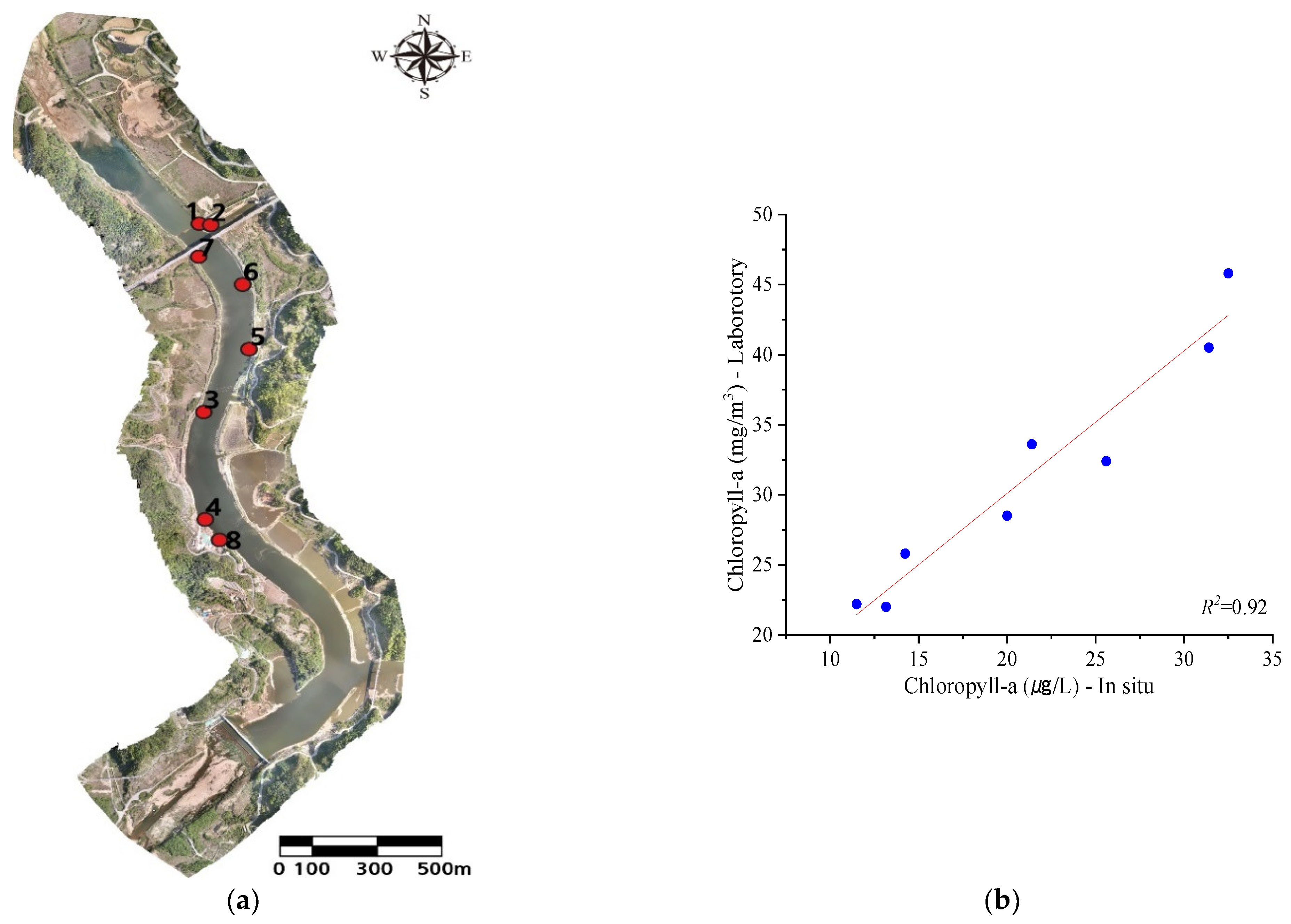
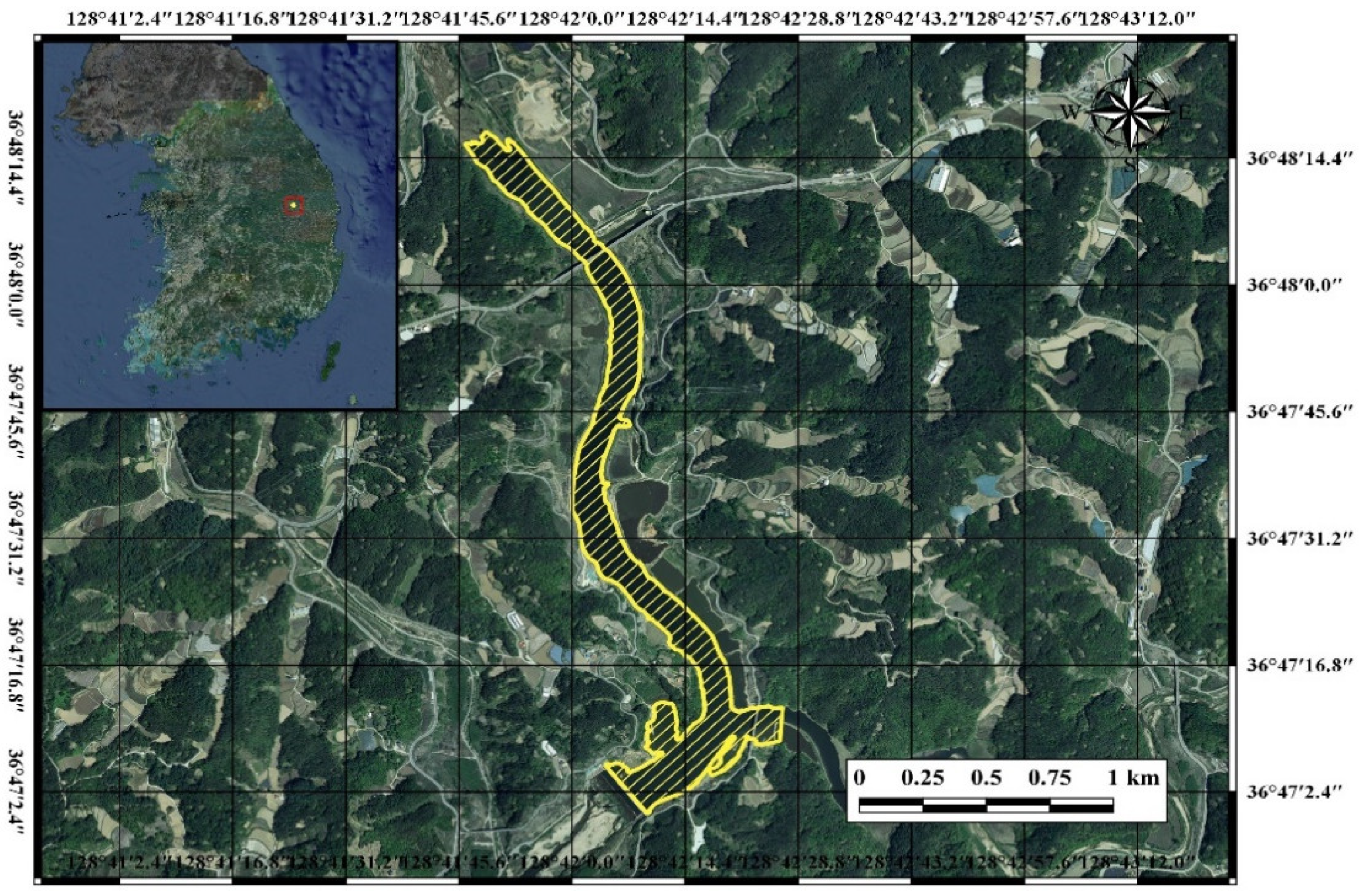
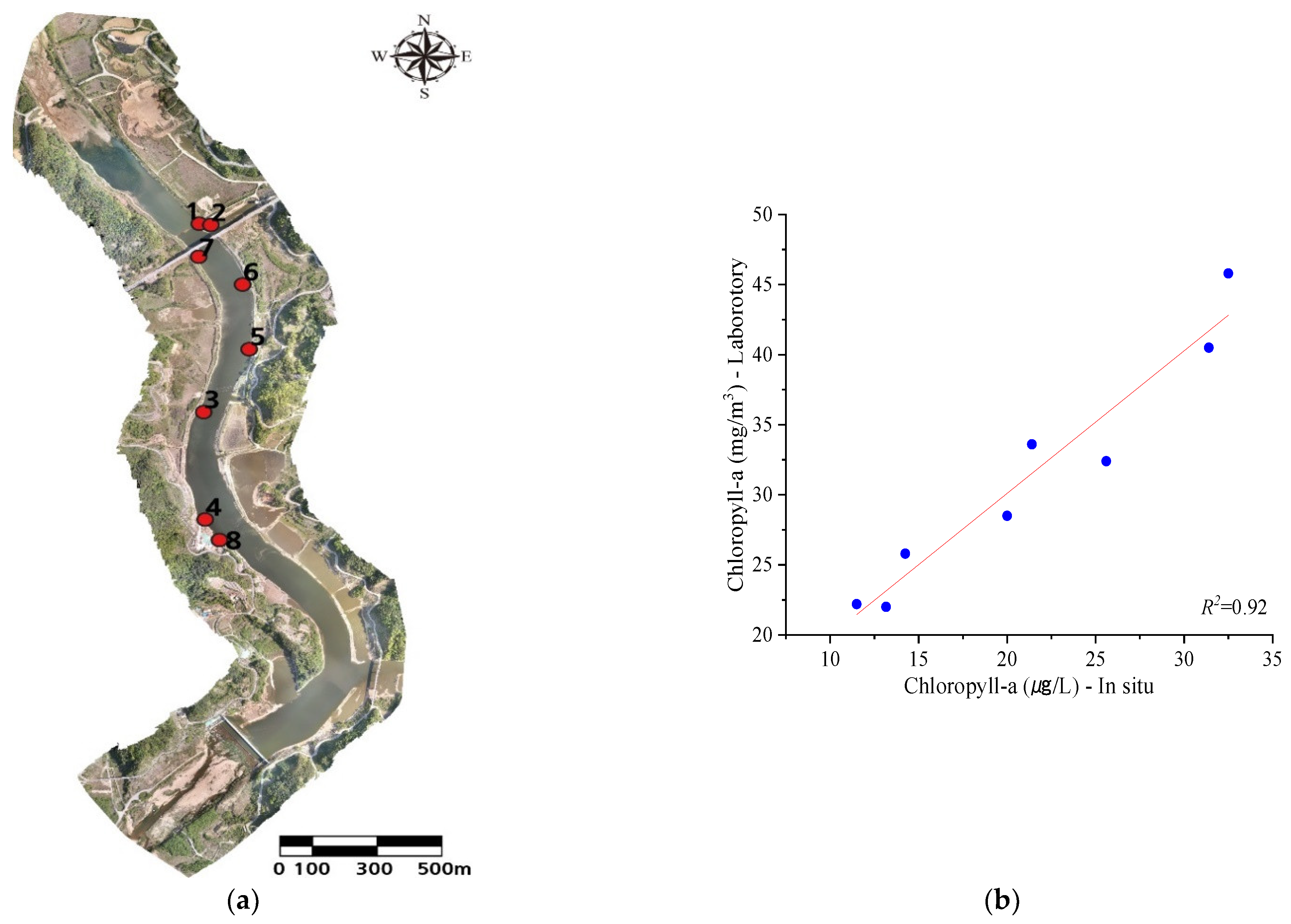
2.1. Study Area
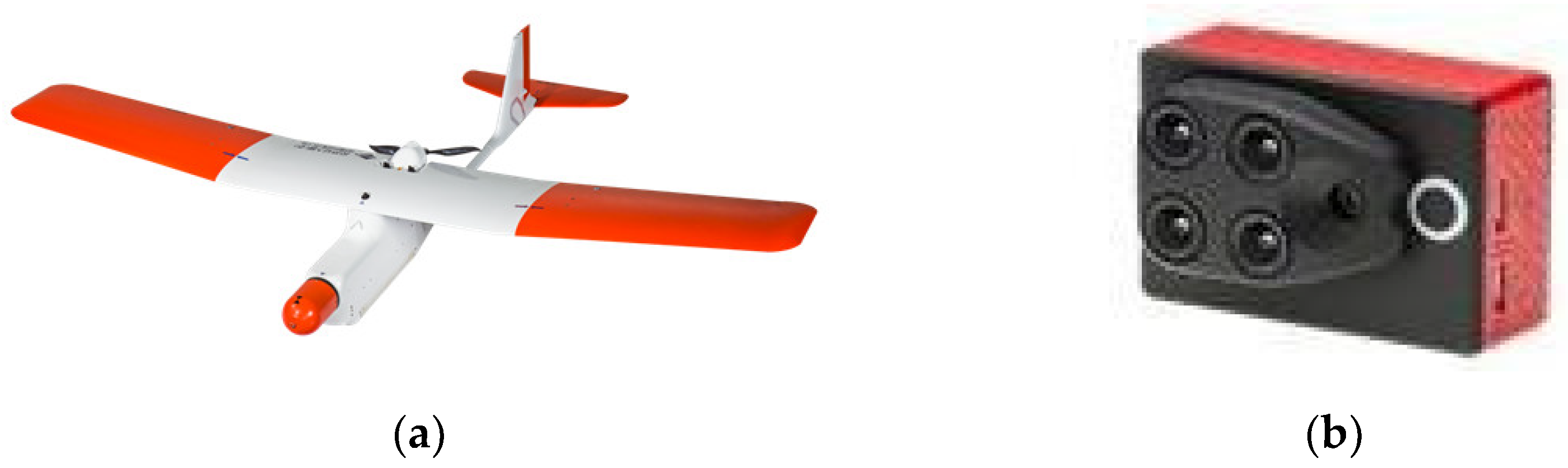
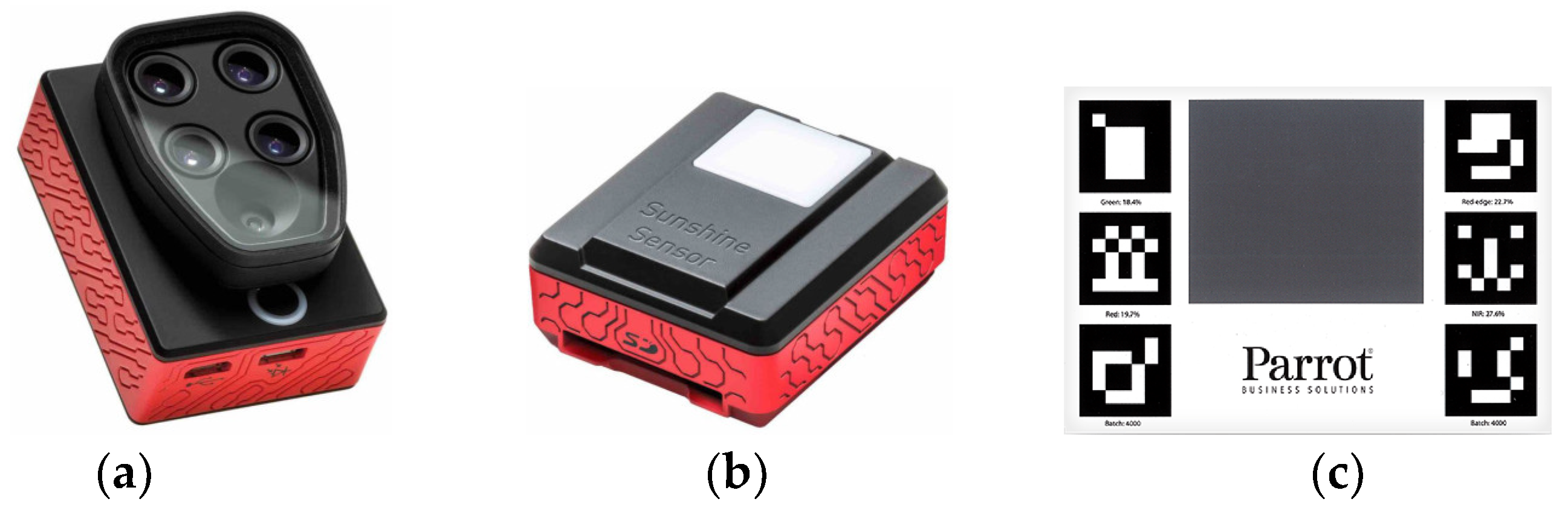
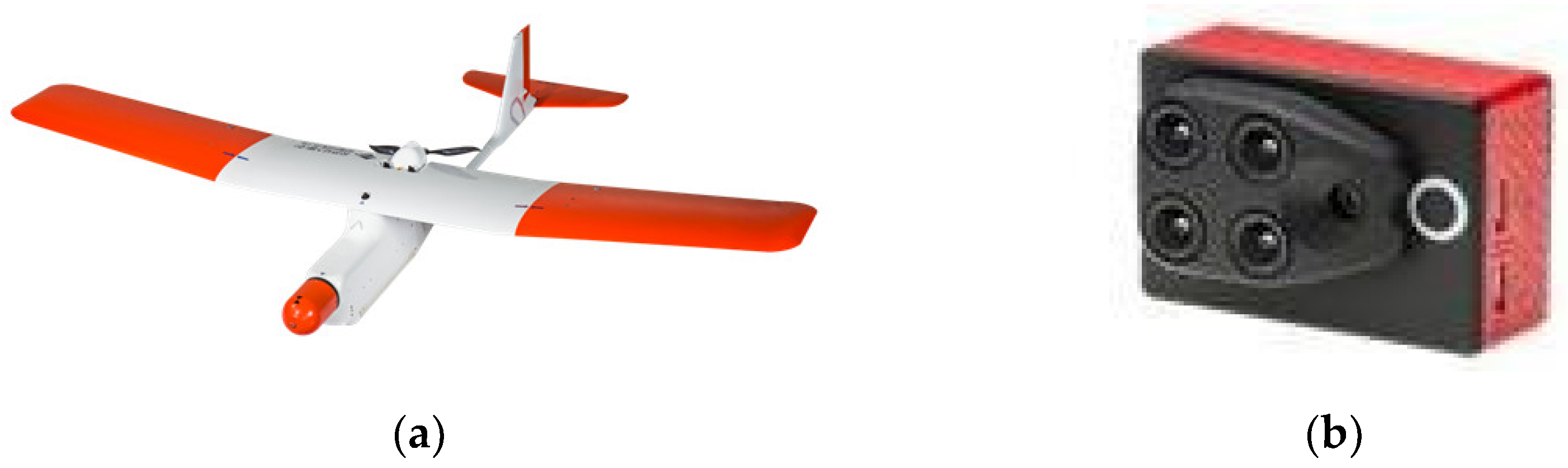
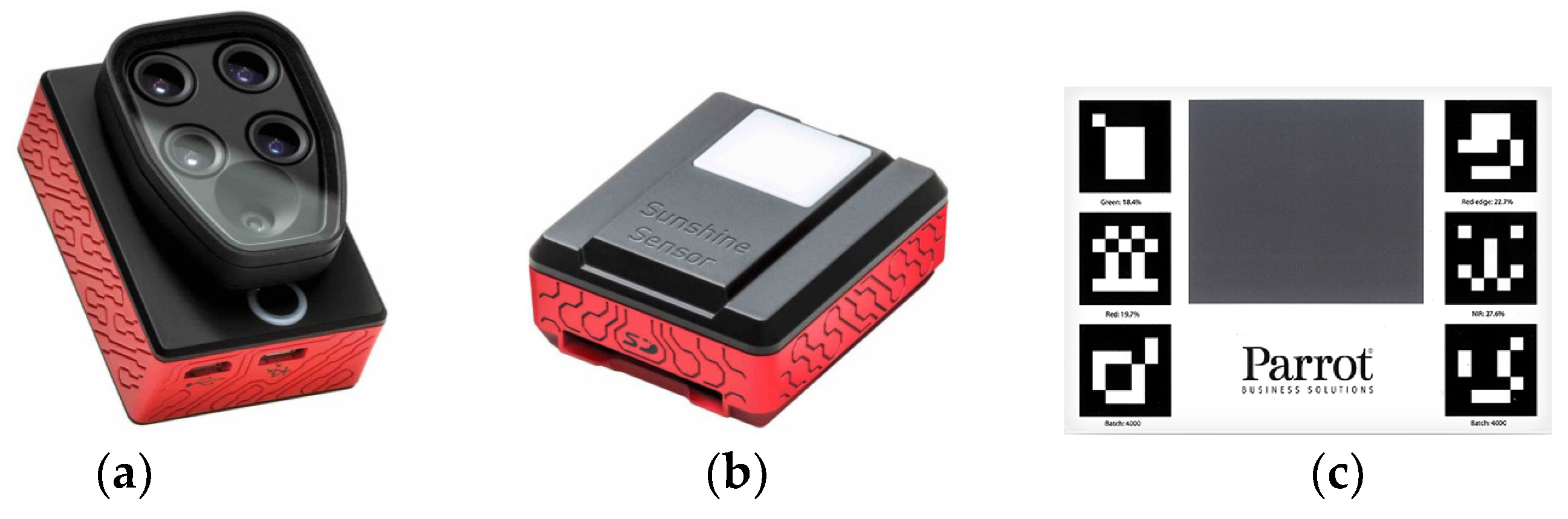
2.2. UAV Data Acquisition and Image Processing
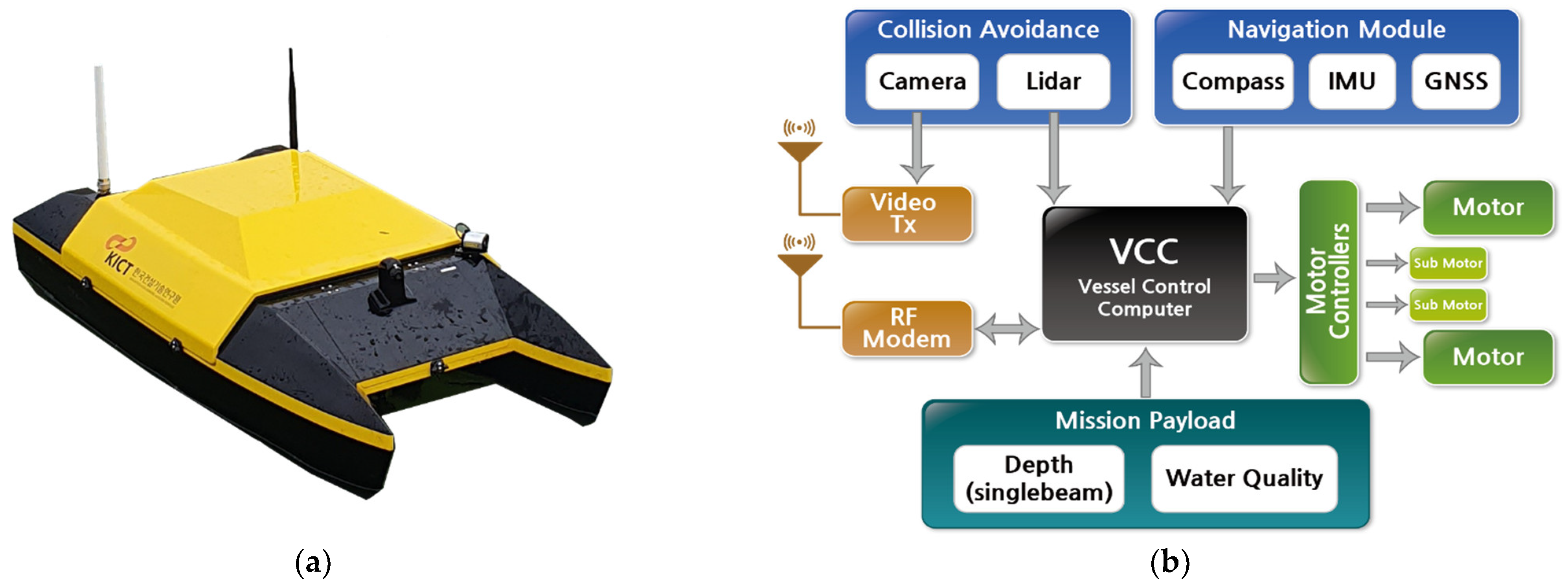
2.3. USV Data Acquisition and Processing
2.4. Chlorophyll-a Spectral Indices
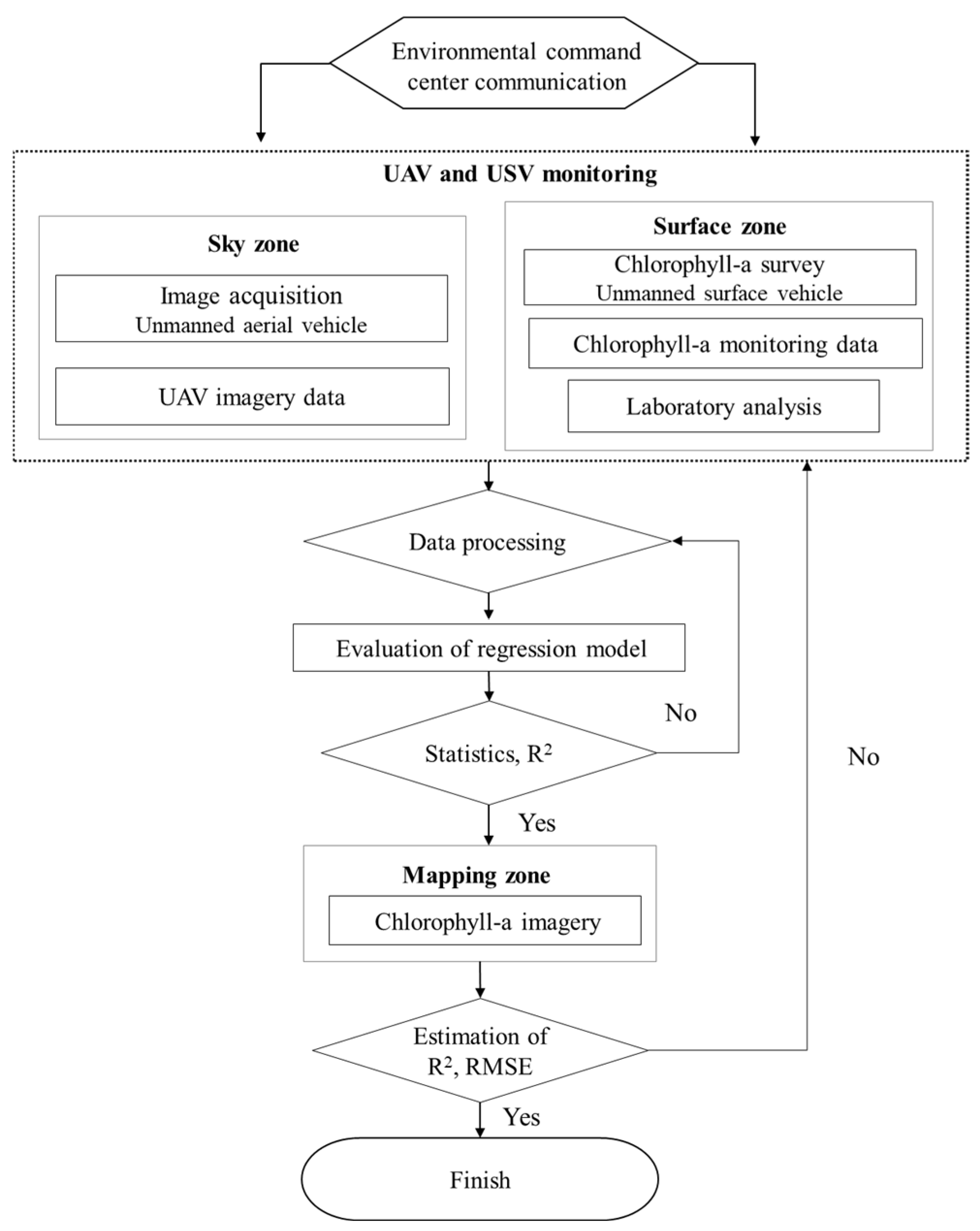
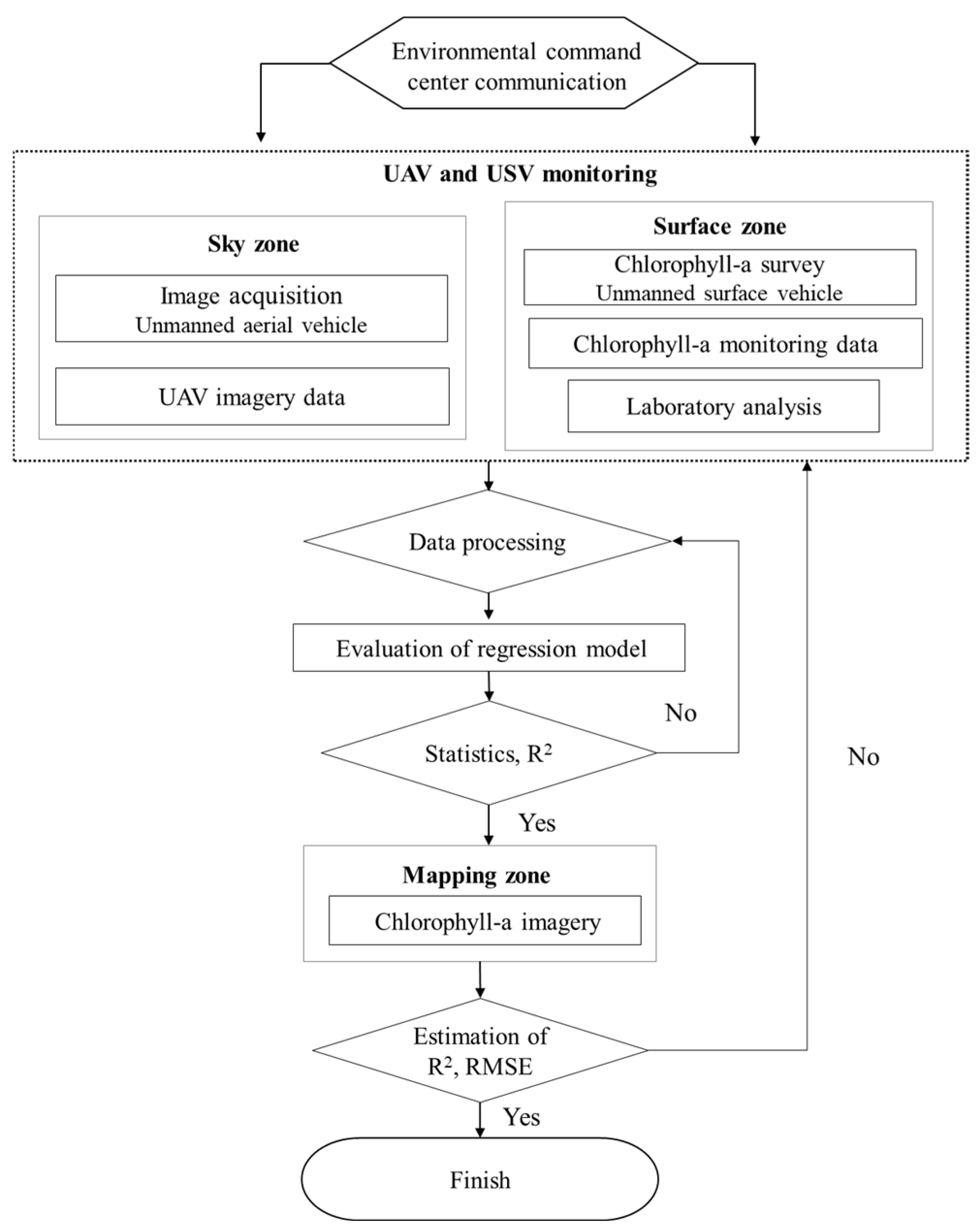
2.5. Methodology Flowchart
3. Results
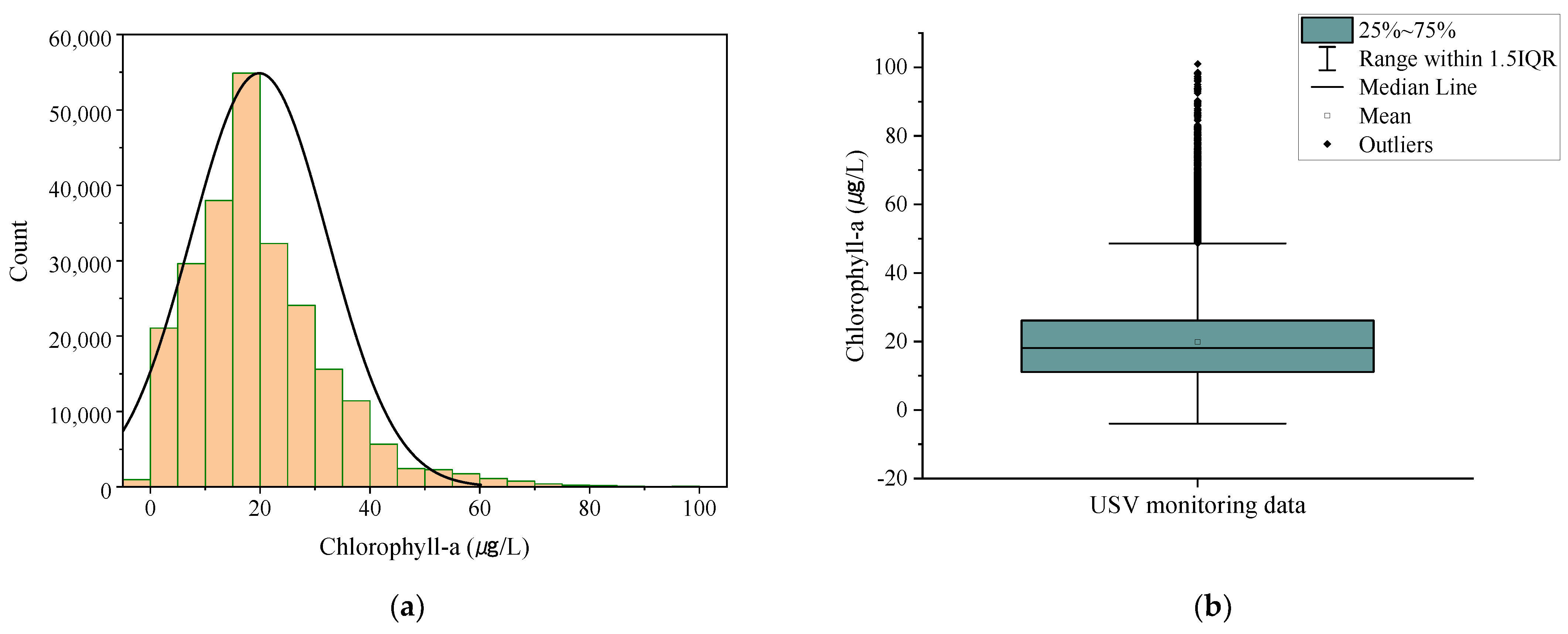
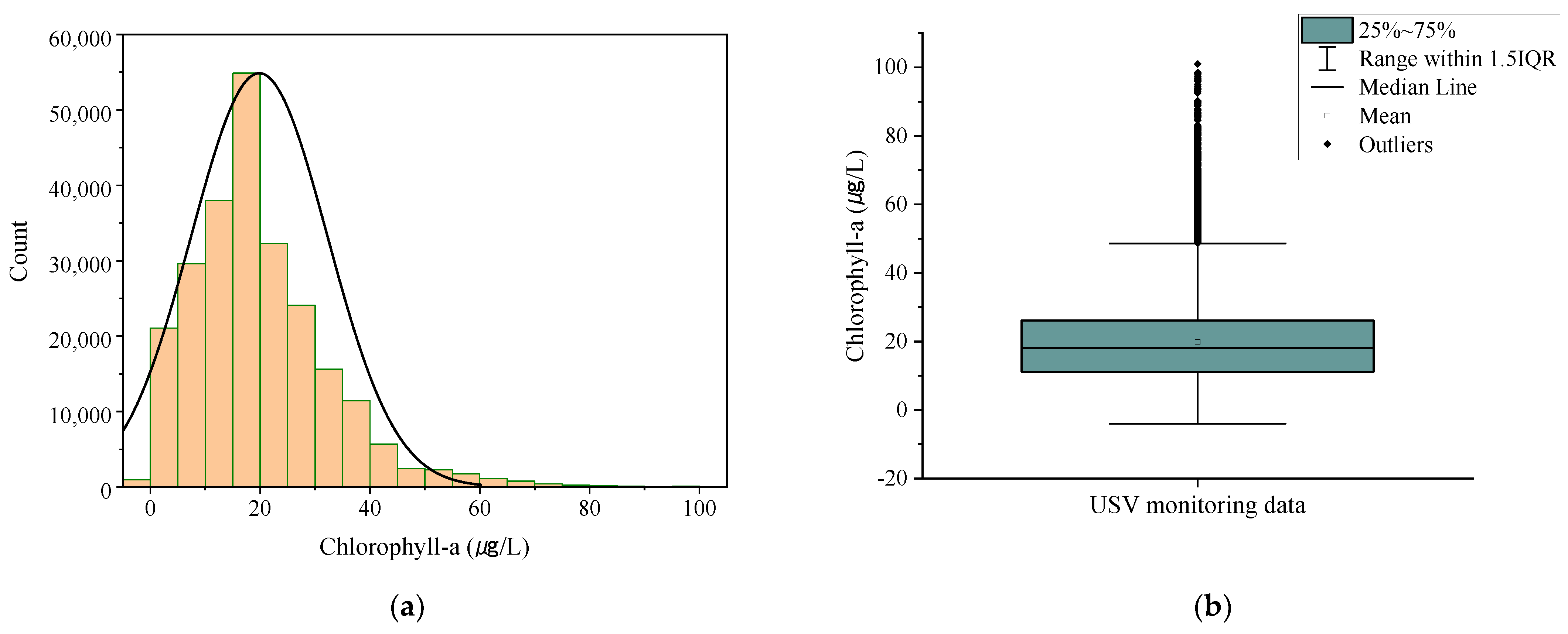
3.1. USV Data Analysis
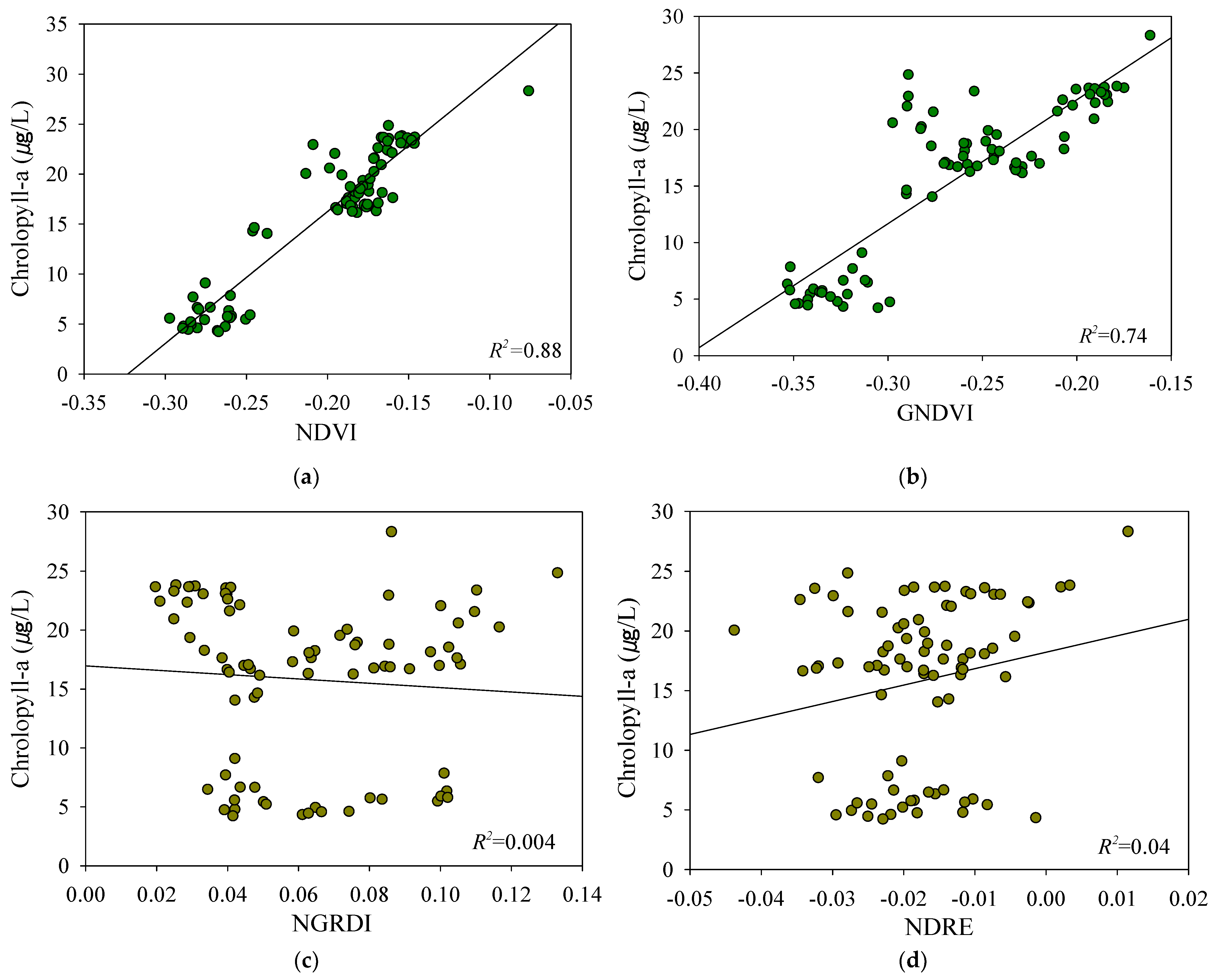
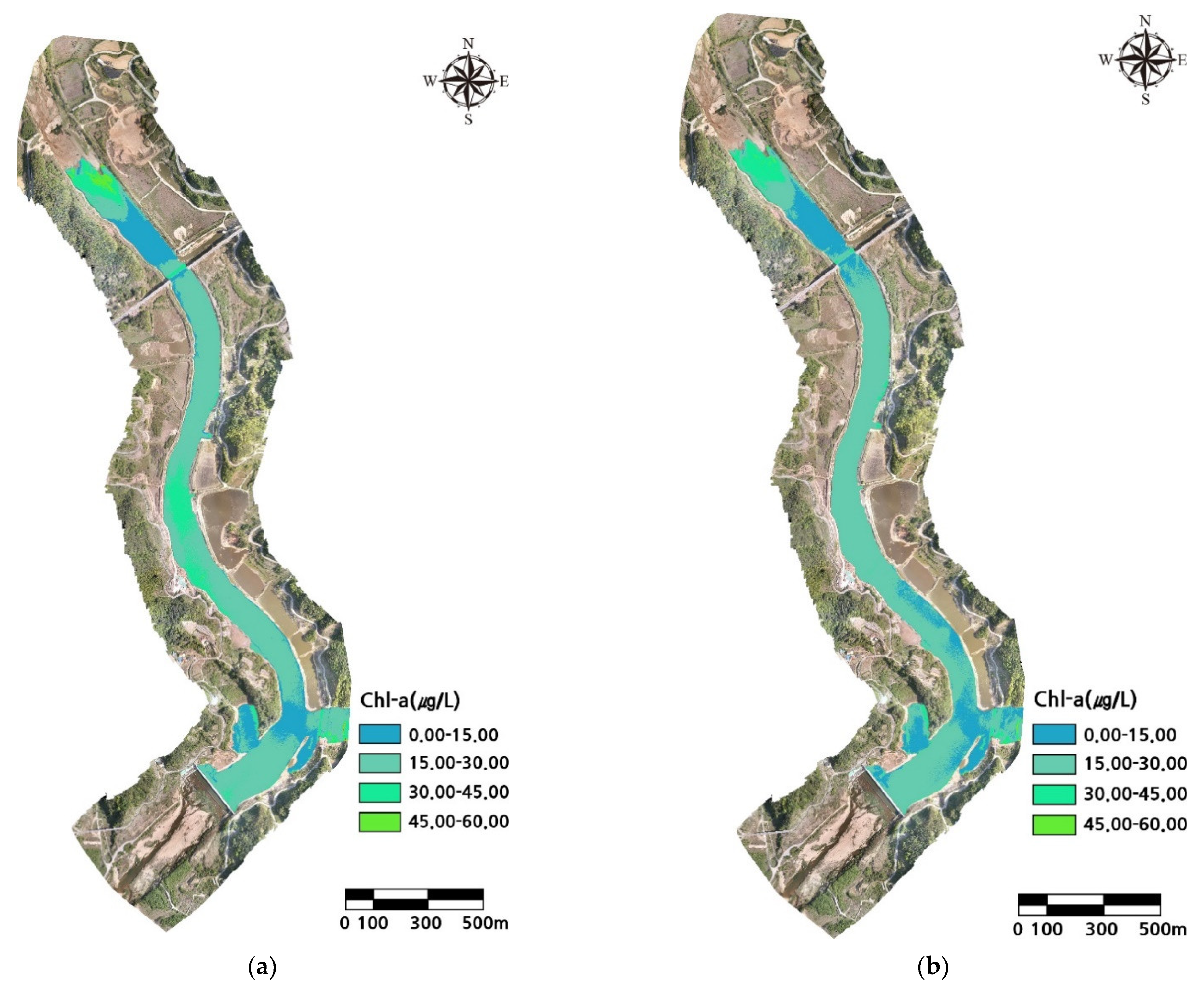
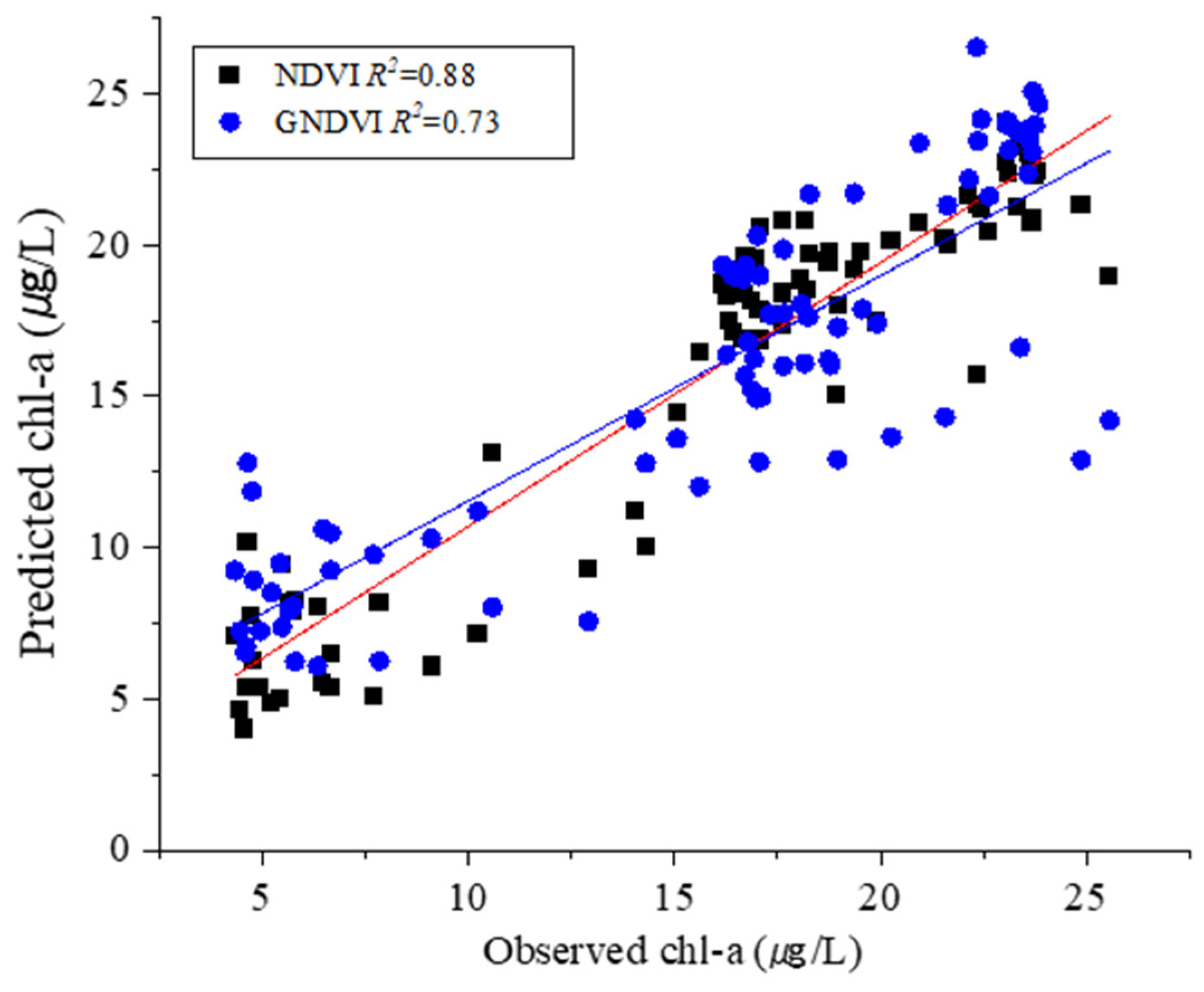
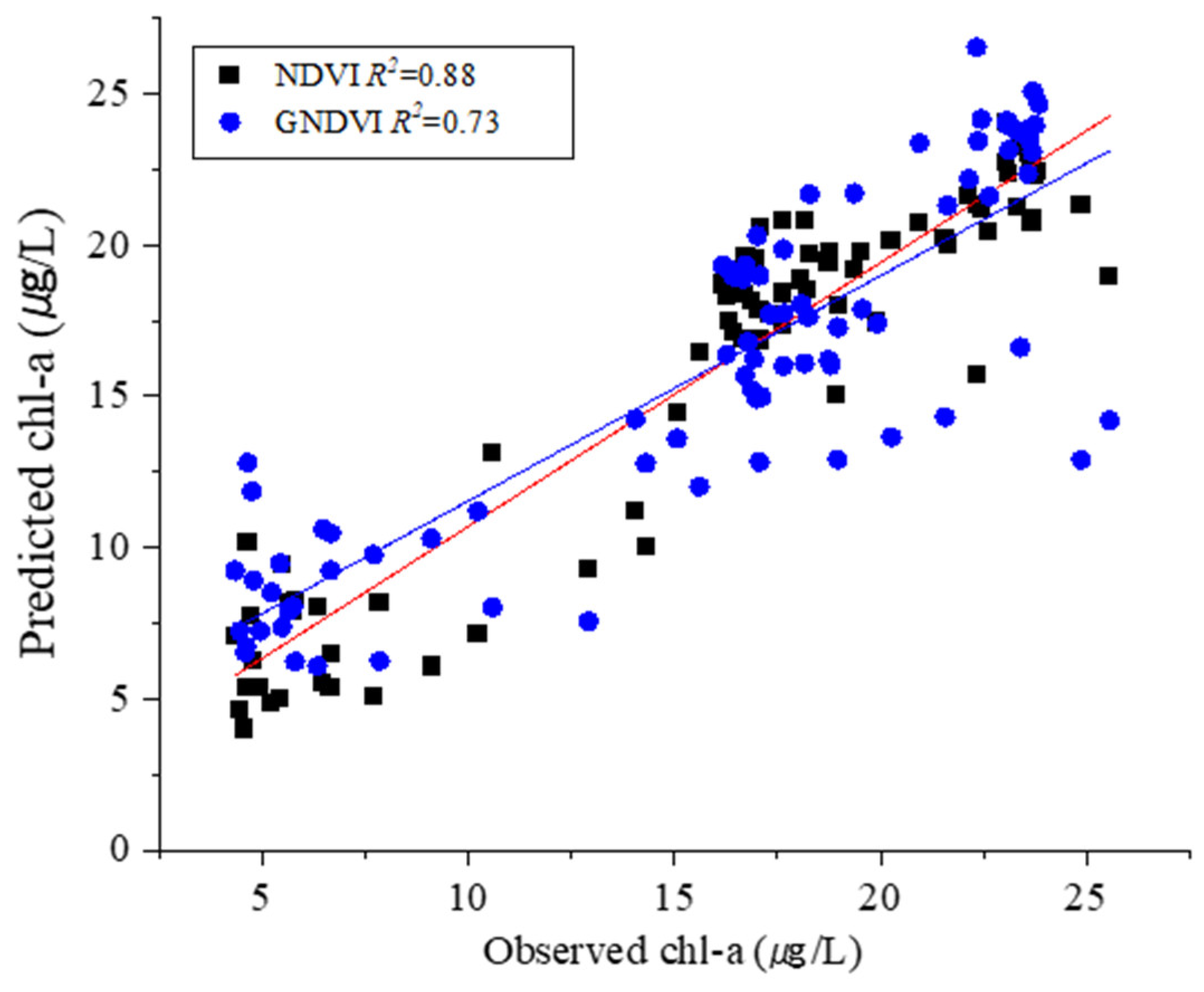
3.2. Spectral Indices Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Van der Merwe, D.; Price, K.P. Harmful algal bloom characterization at ultra-high spatial and temporal resolution using small unmanned aircraft systems. Toxins 2015, 27, 1065–1078. [Google Scholar] [CrossRef] [Green Version]
- Hallegraeff, G.M.A. Review of harmful algal blooms and their apparent global increase. Phycologia 1993, 32, 79–99. [Google Scholar] [CrossRef] [Green Version]
- Preece, E.P.; Hardy, F.J.; Moore, B.C.; Bryan, M.A. Review of microcystin detections in Estuarine and Marine waters: Environmental implications and human health risk. Harmful Algae 2017, 61, 31–45. [Google Scholar] [CrossRef] [Green Version]
- Shen, Q.; Zhu, J.; Cheng, L.; Zhang, Z.; Xu, Z. Enhanced algae removal by drinking water treatment of chlorination coupled with coagulation. Desalination 2011, 271, 236–240. [Google Scholar] [CrossRef]
- Teixeira, M.R.; Rosa, M.J. Comparing dissolved air flotation and conventional sedimentation to remove cyanobacterial cells of Microcystis aeruginosa: Part I: The key operating conditions. Sep. Purif. Technol. 2006, 52, 84–94. [Google Scholar] [CrossRef]
- Figueiredo, D.R.; Azeiteiro, U.M.; Esteves, S.M.; Gon Alves, F.J.M.; Pereira, M.J. Microcystin-producing blooms—A serious global public health issue 1. Ecotoxicol. Environ. Saf. 2004, 59, 151–163. [Google Scholar] [CrossRef]
- Jung, K.Y.; Lee, K.L.; Im, T.H.; Kee, I.J.; Kim, S.; Han, K.T.; Ahn, J.M. Evaluation of water quality for the Nakdong River watershed using multivariate analysis. Environ. Technol. Innov. 2016, 5, 67–82. [Google Scholar] [CrossRef]
- Gregor, J.; Marlek, B. Freshwater phytoplankton quantification by chlorophyll-a: A comparative study of in vitro, in vivo and in situ methods. Water Res. 2004, 38, 517–522. [Google Scholar] [CrossRef] [PubMed]
- Watanabea, Y.; Kawaharab, Y. UAV photogrammetry for monitoring changes in river topography and vegetation. Procedia Eng. 2016, 154, 317–325. [Google Scholar] [CrossRef] [Green Version]
- Flynn, K.F.; Chapra, S.C. Remote sensing of submerged aquatic vegetation in a shallow non-turbid river using an unmanned aerial vehicle. Remote Sens. 2014, 6, 12815–12836. [Google Scholar] [CrossRef] [Green Version]
- Pajares, G. Overview and current status of remote sensing applications based on unmanned aerial vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, 81, 281–329. [Google Scholar] [CrossRef] [Green Version]
- Su, T.C.; Chou, H.T. Application of multispectral sensors carried on unmanned aerial vehicle (UAV) to trophic state mapping of small reservoirs: A case study of Tain-Pu reservoir in Kinmen. Taiwan. Remote Sens. 2015, 7, 10078–10097. [Google Scholar] [CrossRef] [Green Version]
- Zaman, B.; Jensen, A.; Clemens, S.R.; McKee, M. Retrieval of spectral reflectance of high resolution multispectral imagery acquired with an autonomous unmanned aerial vehicle. Photogramm. Eng. Remote Sens. 2014, 80, 1139–1150. [Google Scholar]
- Becker, R.H.; Sayers, M.; Dehm, D.; Shuchman, R.; Quintero, K.; Bosse, K.; Sawtell, R. Unmanned aerial system based spectroradiometer for monitoring harmful algal blooms: A new paradigm in water quality monitoring. J. Great Lakes Res. 2019, 45, 444–453. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; González-Dugo, V.; Berni, J.A.J. Fluorescence, temperature and narrow-band indices acquired from a UAV platform for water stress detection using a micro-hyperspectral imager and a thermal camera. Remote Sens. Environ. 2012, 117, 322–337. [Google Scholar] [CrossRef]
- Richardson, L.L. Remote sensing of algal bloom dynamics. BioScience 1996, 46, 492–501. [Google Scholar] [CrossRef] [Green Version]
- Aguirre-Gómez, R.; Salmerón-García, O.; Gómez-Rodríguez, G.; Peralta-Higuera, A. Use of unmanned aerial vehicles and remote sensors in urban lakes studies in Mexico. Int. J. Remote. Sens. 2017, 38, 2771–2779. [Google Scholar] [CrossRef]
- Tong, A.; He, Y. Estimating and mapping chlorophyll content for a heterogeneous grassland: Comparing prediction power of a suite of vegetation indices across scales between years. ISPRS J. Photogramm. Remote Sens. 2017, 126, 146–167. [Google Scholar] [CrossRef]
- Mishra, S.; Mishra, D.R. Normalized difference chlorophyll index: A novel model for remote estimation of chlorophyll-a concentration in turbid productive waters. Remote Sens. Environ. 2012, 117, 394–406. [Google Scholar] [CrossRef]
- Kedzierski, M.; Wierzbicki, D.; Sekrecka, A.; Fryskowska, A.; Walczykowski, P.; Siewert, J. Influence of lower atmosphere on the radiometric quality of unmanned aerial vehicle imagery. Remote Sens. 2019, 11, 1214. [Google Scholar] [CrossRef] [Green Version]
- Deng, L.; Tan, Y.; Gong, H.; Duan, F.; Zhong, R. The effect of spatial resolution on radiometric and geometric performances of a UAV-mounted hyperspectral 2D imager. ISPRS J. Photogramm. Remote Sens. 2018, 144, 298–314. [Google Scholar] [CrossRef]
- Brede, B.; Suomalainen, J.; Bartholomeus, H.; Herold, M. Influence of solar zenith angle on the enhanced vegetation index of a Guyanese rainforest. Remote Sens. Lett. 2015, 6, 972–981. [Google Scholar] [CrossRef]
- Zeng, C.; Richardson, M.; King, D.J. The impacts of environmental variables on water reflectance measured using a lightweight unmanned aerial vehicle (UAV)-based spectrometer system. J. Photogramm. Remote Sens. 2017, 130, 217–230. [Google Scholar] [CrossRef]
- Fawcett, D.; Panigada, C.; Tagliabue, G.; Boschetti, M.; Celesti, M.; Evdokimov, A.; Biriukova, K.; Colombo, R.; Miglietta, F.; Rascher, U.; et al. Multi-scale evaluation of drone-based multispectral surface reflectance and vegetation indices in operational conditions. Remote Sens. 2020, 12, 514. [Google Scholar] [CrossRef] [Green Version]
- Choe, E.Y.; Lee, J.W.; Lee, J.K. Estimation of chlorophyll-a concentrations in the Nakdong River using high-resolution satellite image. Korean J. Remote Sens. 2011, 27, 613–623. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Tan, C.H.; Kao, S.J.; Wang, T.S. Improvement of remote monitoring on water quality in a subtropical reservoir by incorporating grammatical evolution with parallel genetic algorithms into satellite imagery. Water Res. 2008, 42, 296–306. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Dall’Olmo, G.; Moses, W.; Rundquist, D.C.; Barrow, T.; Fisher, T.R.; Gurlin, D.; Holz, J. A simple semi-analytical model for remote estimation of chlorophyll-a in turbid waters: Validation. Remote Sens. Environ. 2008, 112, 3582–3593. [Google Scholar] [CrossRef]
- Brezonik, P.; Menken, K.D.; Bauer, M. Landsat-based remote sensing of lake water quality characteristics, including chlorophyll and colored dissolved organic matter (CDOM). Lake Reserv. Manag. 2005, 21, 373–382. [Google Scholar] [CrossRef]
- Tebbs, E.J.; Remedios, J.J.; Harper, D.M. Remote sensing of chlorophyll-a as a measure of cyanobacterial biomass in Lake Bogoria, a hypertrophic, saline-alkaline, flamingo lake, using Landsat ETM+. Remote Sens. Environ. 2013, 135, 92–106. [Google Scholar] [CrossRef]
- Kislik, C.; Dronova, I.; Kelly, M. UAVs in support of algal bloom research: A review of current applications and future opportunities. Drones 2018, 2, 35. [Google Scholar] [CrossRef] [Green Version]
- Ferri, G.; Manzi, A.; Fornai, F.; Ciuchi, F.; Laschi, C. The HydroNet ASV, a small-sized autonomous catamaran for real-time monitoring of water quality: From design to missions at sea. IEEE J. Ocean. Eng. 2015, 40, 710–726. [Google Scholar] [CrossRef]
- Tu, Y.H.; Phinn, S.; Johansen, K.; Robson, A. Assessing radiometric correction approaches for multi-spectral UAS imagery for horticultural applications. Remote Sens. 2018, 10, 1684. [Google Scholar] [CrossRef] [Green Version]
- Naeem, W.; Sutton, R.; Chudley, J. Soft computing design of a linear quadratic Gaussian controller for an unmanned surface vehicle. In Proceedings of the 14th Mediterranean Conference on Control and Automation, Ancona, Italy, 28–30 June 2006; pp. 1–6. [Google Scholar]
- Demetillo, A.T.; Taboada, E.B. Real-time water quality monitoring for small aquatic area using unmanned surface vehicle. ETASR 2019, 9, 3959–3964. [Google Scholar] [CrossRef]
- Arzamendia, M.; Espartza, I.; Reina, D.G.; Toral, S.L.; Gregor, D. Comparison of Eulerian and Hamiltonian circuits for evolutionary-based path planning of an autonomous surface vehicle for monitoring Ypacarai Lake. JAIHC 2019, 10, 1495–1507. [Google Scholar] [CrossRef]
- Manley, J.E. Unmanned maritime vehicles, 20 years of commercial and technical evolution. In Oceans 2016 MTS/IEEE Monterey; IEEE: New York, NY, USA, 2016; Volume 9, pp. 19–23. [Google Scholar]
- Bayat, B.; Crasta, N.; Crespi, A.; Pascoal, A.M.; Ijspeert, A. Environmental monitoring using autonomous vehicles: A survey of recent searching techniques. Curr. Opin. Biotechnol. 2017, 45, 76–84. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wiora, J.; Kozyra, A.; Wiora, A. Towards automation of measurement processes of surface water parameters by a remote-controlled catamaran. Bull. Pol. Acad. Sci. Tech. Sci. 2017, 65, 351–359. [Google Scholar] [CrossRef] [Green Version]
- Fornai, F.; Ferri, G.; Manzi, A.; Ciuchi, F.; Bartaloni, F.; Laschi, C. An autonomous water monitoring and sampling system for small-sized ASVs. IEEE J. Ocean. Eng. 2017, 42, 5–12. [Google Scholar]
- Mousazadeh, H.; Hamid, J.; Elham, O.; Farshid, M.; Ali, K.; Yousef, S.; Ashkan, M. Experimental evaluation of a hydrography surface vehicle in four navigation modes. J. Ocean Eng. Technol. 2017, 2, 127–136. [Google Scholar] [CrossRef]
- Rabah, F.K.J.; Ghabayen, S.M.; Salha, A.A. Effect of GIS interpolation techniques on the accuracy of the spatial representation of groundwater monitoring data in Gaza Strip. J. Environ. Sci. Technol. 2011, 4, 579–589. [Google Scholar] [CrossRef] [Green Version]
- Goldberg, S.J.; Kirby, J.T.; Licht, S.C. Applications of Aerial Multi-Spectral Imagery for Algal Bloom Monitoring in Rhode Island; SURFO Technical Report No. 16-01; University of Rhode Island: South Kingstown, RI, USA, 2016; Volume 28. [Google Scholar]
- Mantzafleri, N.; Psilovikos, A.; Blanta, A. Water quality monitoring and modeling in Lake Kastoria, using GIS. Assessment and management of pollution sources. Water Resour. Manag. 2009, 23, 3221–3254. [Google Scholar] [CrossRef]
- Pan, Z.; Zhang, H.; Min, X.; Xu, Z. Vicarious calibration correction of large FOV sensor using BRDF model based on UAV angular spectrum measurements. J. Appl. Remote Sens. 2020, 14, 027501. [Google Scholar] [CrossRef] [Green Version]
- Brown, C.A.; Huot, Y.; Werdell, P.J.; Gentili, B.; Claustre, H. The origin and global distribution of second order variability in satellite ocean color. Remote Sens. Environ. 2008, 112, 4186–4203. [Google Scholar] [CrossRef]
- Cannizzaro, J.P.; Carder, K.L. Estimating chlorophyll a concentrations from remote sensing reflectance in optically shallow waters. Remote Sens. Environ. 2006, 101, 13–24. [Google Scholar] [CrossRef]
- Schofield, O.; Grzymski, J.; Bissett, P.W.; Kirkpatrick, G.J.; Millie, D.F.; Moline, M.; Roeseler, C.S. Optical monitoring and forecasting systems for harmful algal blooms: Possibility or pipedream. J. Phycol. 1999, 35, 1477–1496. [Google Scholar] [CrossRef] [Green Version]
- Jiang, R.; Wang, P.; Xu, Y.; Zhou, Z.; Luo, X.; Lan, Y.; Zhao, G.; Sanchez-Azofeifa, A.; Laakso, K. Assessing the operation parameters of a low-altitude UAV for the collection of NDVI values over a Paddy Rice Field. Remote Sens. 2020, 12, 1850. [Google Scholar] [CrossRef]
- Lu, H.; Fan, T.; Ghimire, P.; Deng, L. Experimental evaluation and consistency comparison of UAV multispectral minisensors. Remote Sens. 2020, 12, 2542. [Google Scholar] [CrossRef]
- Parrot. SEQ-AN-02, Application Note: Pixel Value to Irradiance Using the Sensor Calibration Model; Parrot: Paris, France, 2017; Volume SEQ-AN-01. [Google Scholar]
- Lowe, G.D. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 20, 91–110. [Google Scholar] [CrossRef]
- Axler, R.; Will, N.; Ruzycki, E.; Henneck, J.; Olker, J.; Swintek, J. Minnesota Lake Water Quality On-Line Database and Visualization Tools for Exploratory Trend Analyses; Technical Report NRRI/TR-2009/28; University of Minnesota Duluth: Duluth, MN, USA, 2009. [Google Scholar]
- American Public Health Association (APHA). Standard Methods for the Examination of Water and Wastewater, 21st ed.; American Public Health Association: Washington, DC, USA, 2005. [Google Scholar]
- Song, B.G.; Park, K.G. Detection of aquatic plants using multispectral UAV imagery and vegetation index. Remote Sens. 2020, 12, 387. [Google Scholar] [CrossRef] [Green Version]
- Xu, F.; Gao, Z.; Jiang, X.; Shang, W.; Ning, J.; Song, D.; Ai, J. A UAV and S2A data-based estimation of the initial biomass of green algae in the South Yellow Sea. Mar. Pollut. Bull. 2018, 128, 408–414. [Google Scholar] [CrossRef]
- Jang, S.W.; Yoon, H.J.; Kwak, S.N.; Sohn, B.Y.; Kim, S.G.; Kim, D.H. Algal bloom monitoring using UAVs imagery. Adv. Sci. Technol. Lett. 2016, 138, 30–33. [Google Scholar]
- Kim, H.M.; Yoon, H.J.; Jang, S.W.; Kwak, S.N.; Sohn, B.Y.; Kim, S.G.; Kim, D.H. Application of unmanned aerial vehicle imagery for algal bloom monitoring in river basin. Int. J. Control Autom. 2016, 9, 203–220. [Google Scholar] [CrossRef]
- Gitelson, A.; Merzlyak, M.N. Quantitative estimation of chlorophyll-a using reflectance spectra: Experiments with autumn chestnut and maple leaves. J. Photochem. Photobiol. B Biol. 1994, 22, 247–252. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Derivation | References |
|---|---|---|
| Normalized difference vegetation index (NDVI) | (NIR * − red)/(NIR + red) | [54] |
| Normalized green–red difference index (NGRDI) | (green − red)/(green + red) | [55] |
| Green normalized difference vegetation index (GNDVI) | (NIR − green)/(NIR + green) | [56,57] |
| Normalized difference red edge index (NDRE) | (NIR − red edge)/(NIR + red edge) | [58] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, E.-J.; Nam, S.-H.; Koo, J.-W.; Hwang, T.-M. Hybrid Approach of Unmanned Aerial Vehicle and Unmanned Surface Vehicle for Assessment of Chlorophyll-a Imagery Using Spectral Indices in Stream, South Korea. Water 2021, 13, 1930. https://doi.org/10.3390/w13141930
Kim E-J, Nam S-H, Koo J-W, Hwang T-M. Hybrid Approach of Unmanned Aerial Vehicle and Unmanned Surface Vehicle for Assessment of Chlorophyll-a Imagery Using Spectral Indices in Stream, South Korea. Water. 2021; 13(14):1930. https://doi.org/10.3390/w13141930
Chicago/Turabian StyleKim, Eun-Ju, Sook-Hyun Nam, Jae-Wuk Koo, and Tae-Mun Hwang. 2021. "Hybrid Approach of Unmanned Aerial Vehicle and Unmanned Surface Vehicle for Assessment of Chlorophyll-a Imagery Using Spectral Indices in Stream, South Korea" Water 13, no. 14: 1930. https://doi.org/10.3390/w13141930