Application of Random Forest and ICON Models Combined with Weather Forecasts to Predict Soil Temperature and Water Content in a Greenhouse

 , ,
, ,  , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
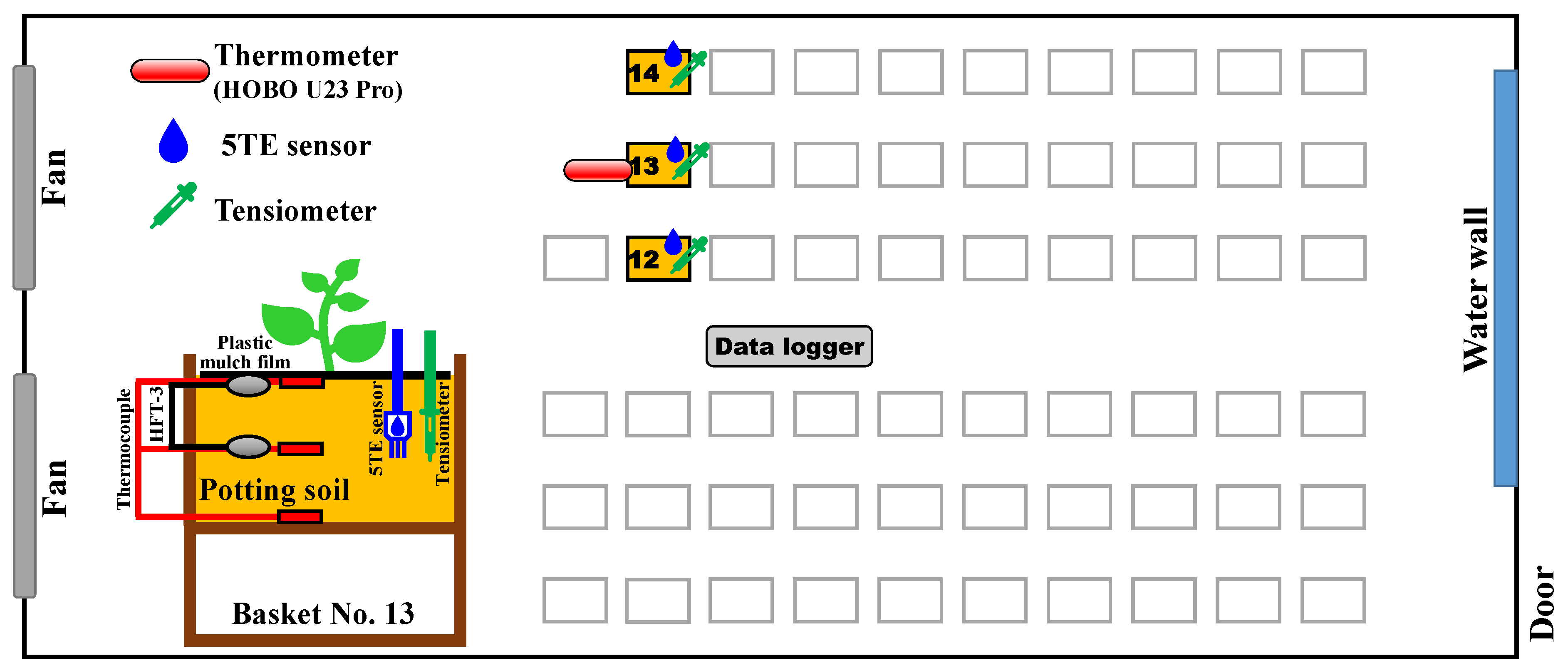
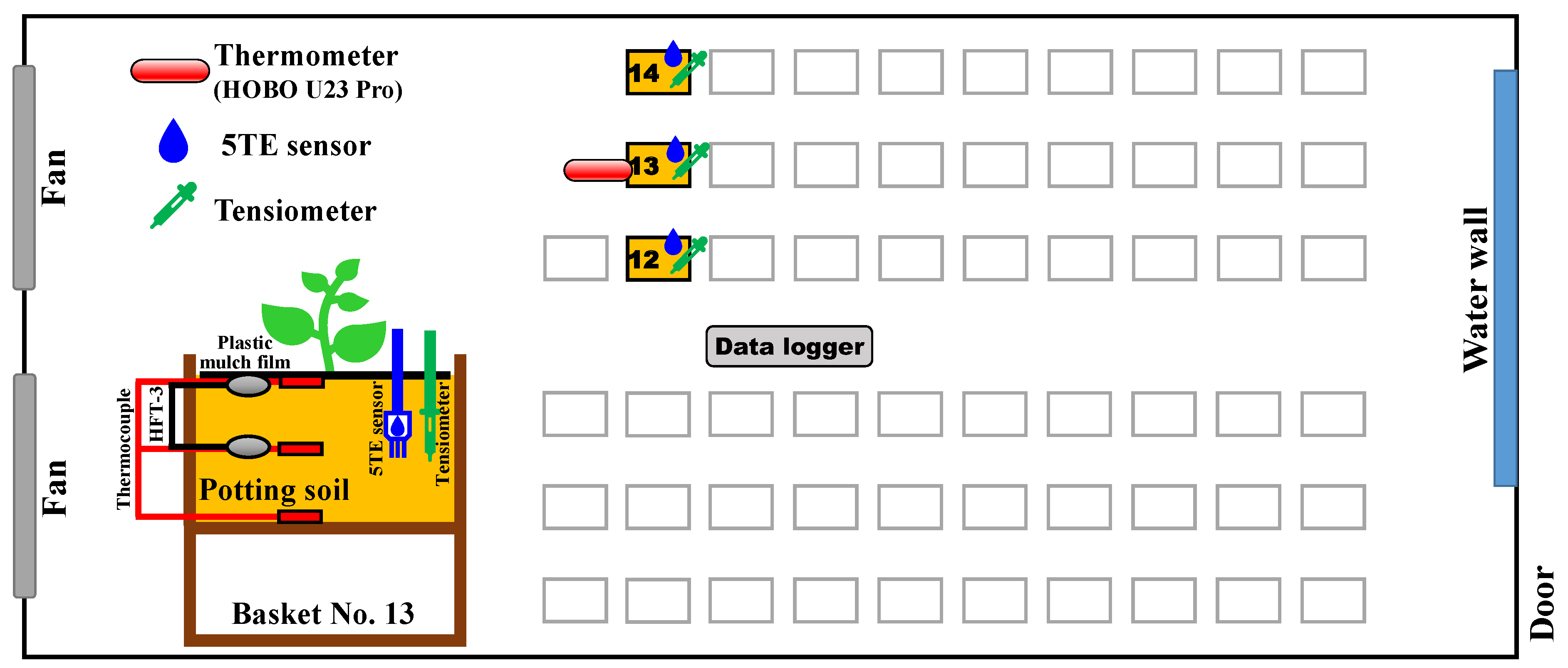
2.1. Greenhouse Setup
2.2. Crop Description and Planting
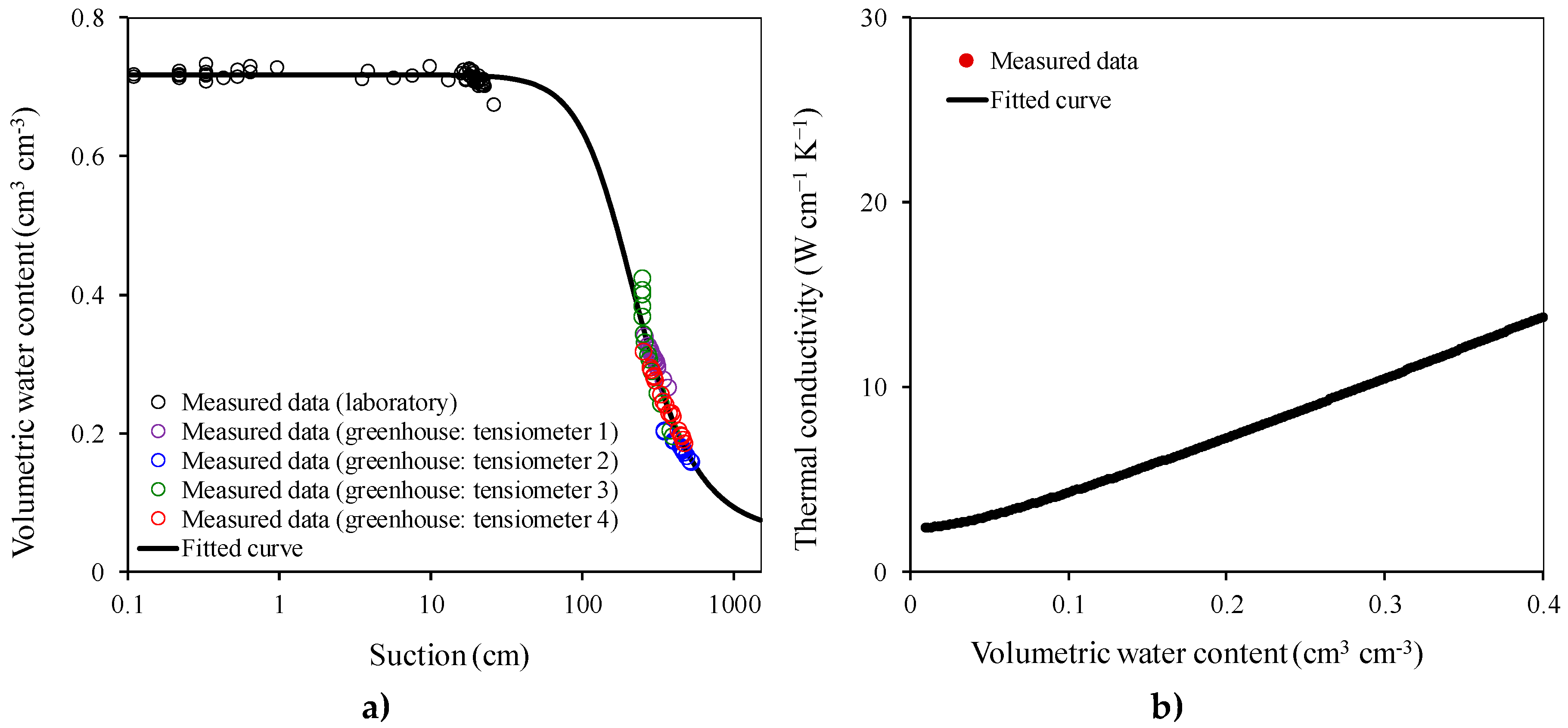
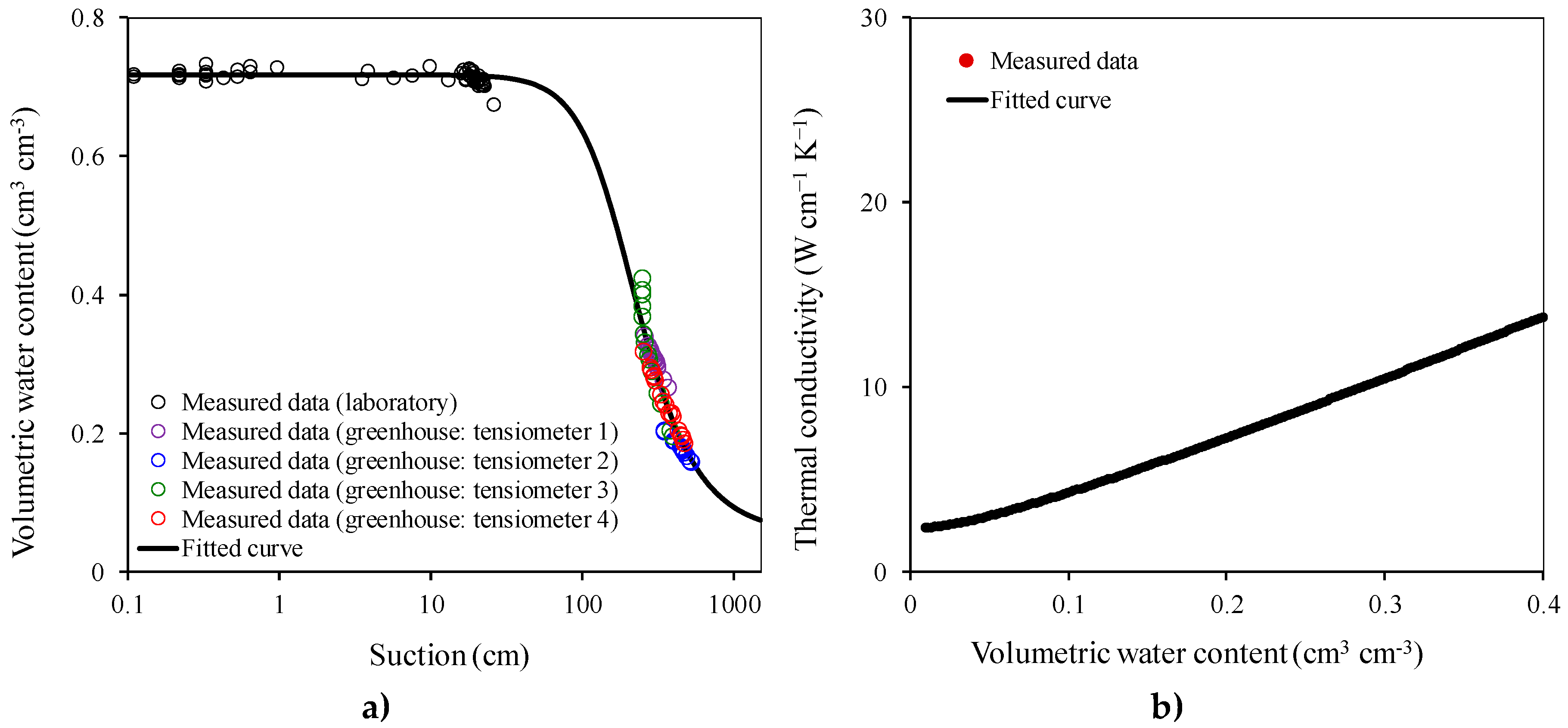
2.3. Culture Substrate Characteristics
2.4. Processing and Analyzing Data
3. Physical and Numerical Models
3.1. Physical Models
3.1.1. Newton’s Law of Cooling
3.1.2. HYDRUS-1D
3.2. Random Forest
3.3. Inferring Connections of Networks (ICON)
4. Results and Discussion
4.1. Temperature
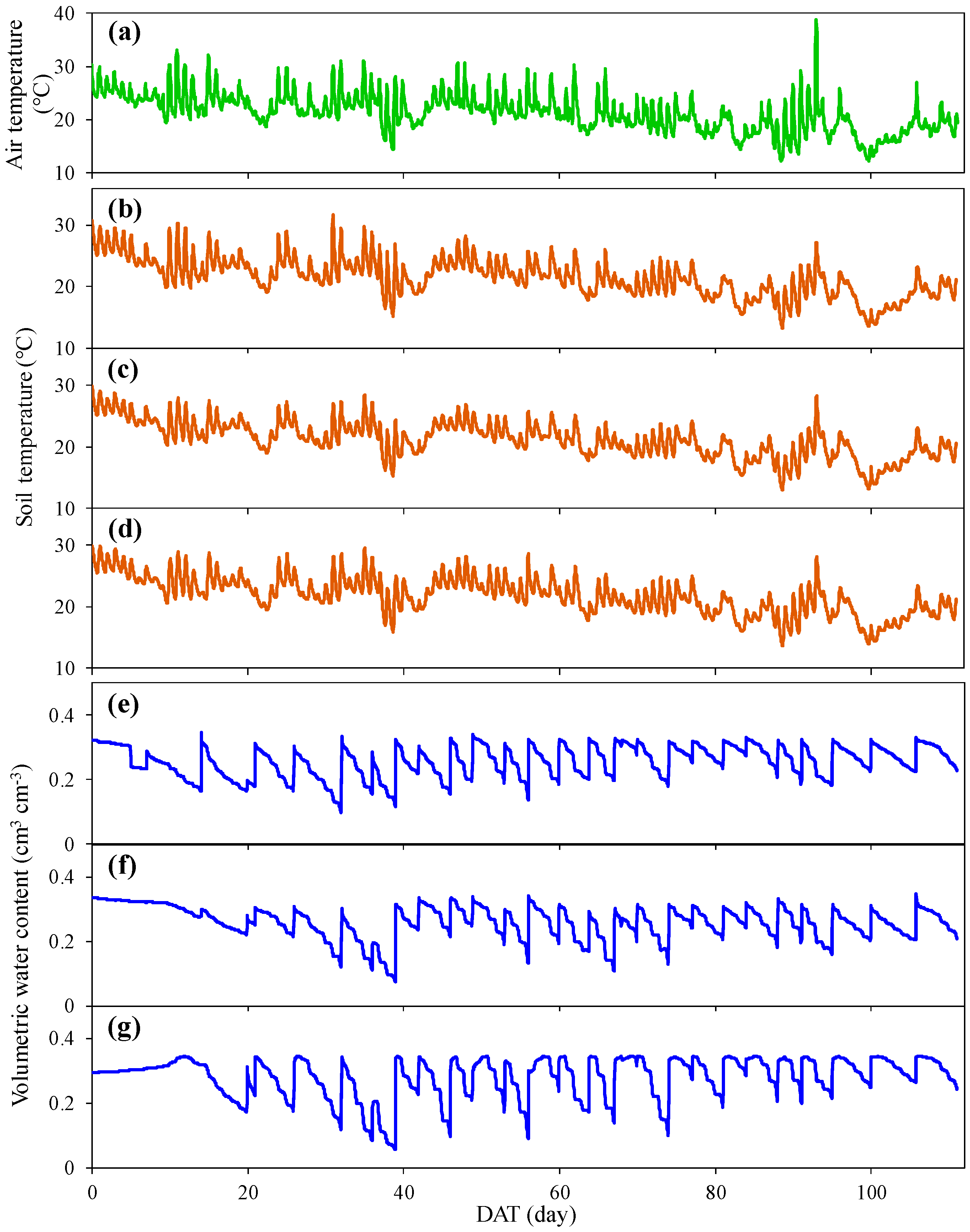
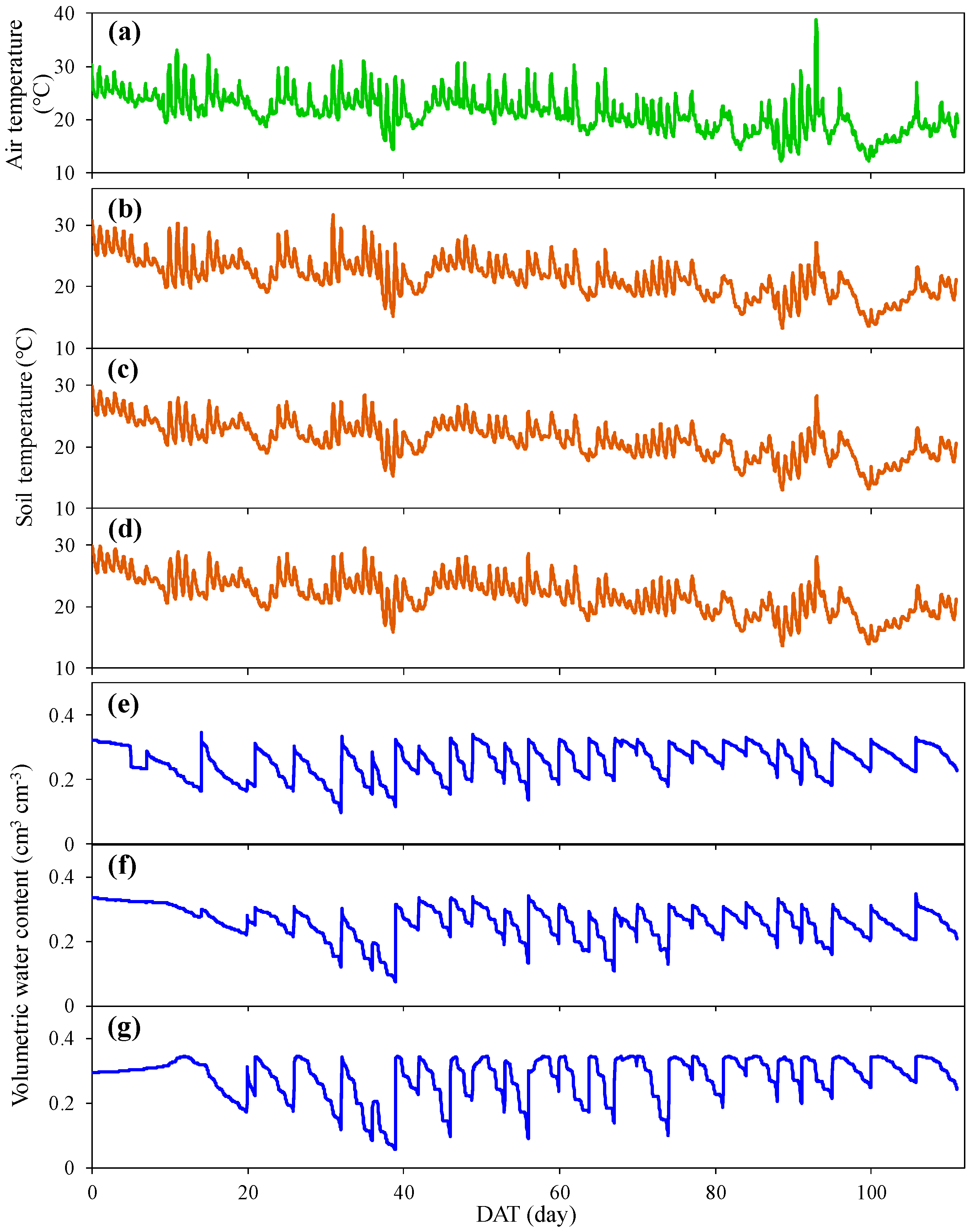
4.1.1. Temporal Distributions of Air Temperature ( ) and Soil Temperature ()
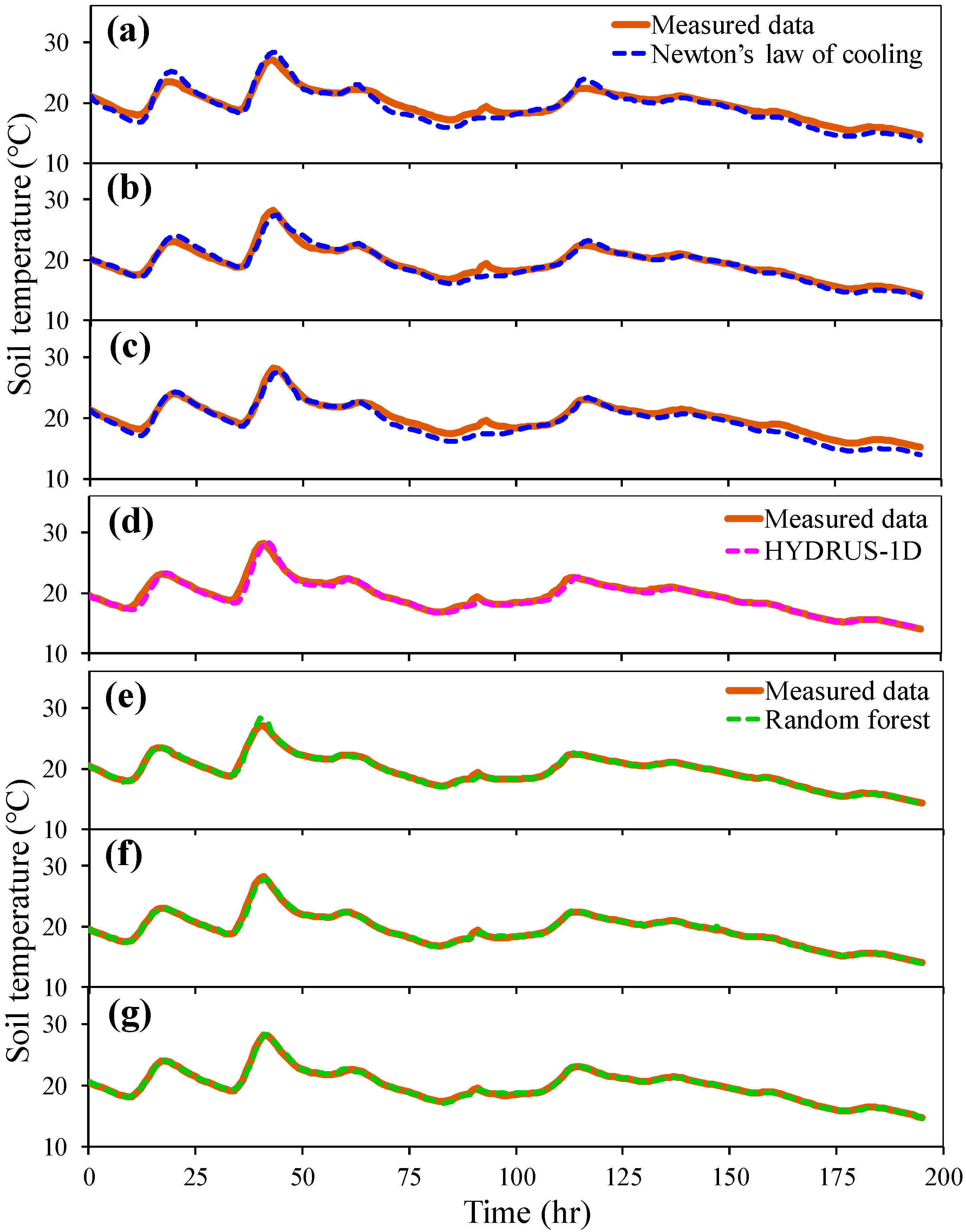
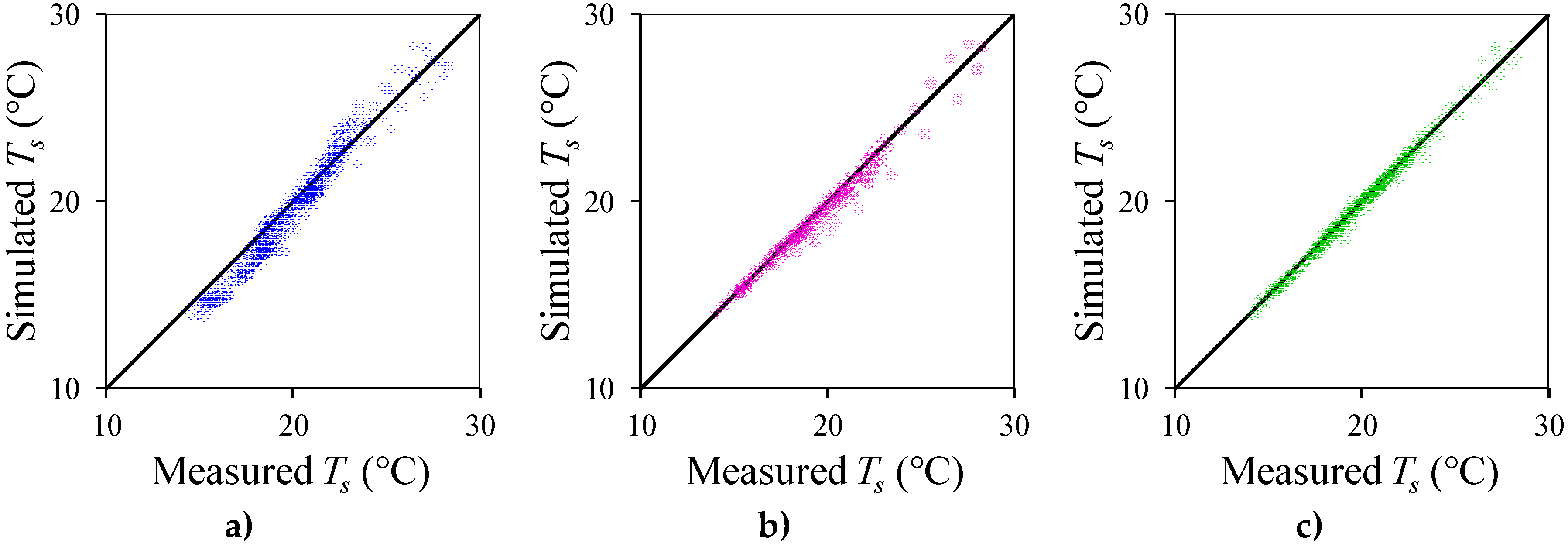
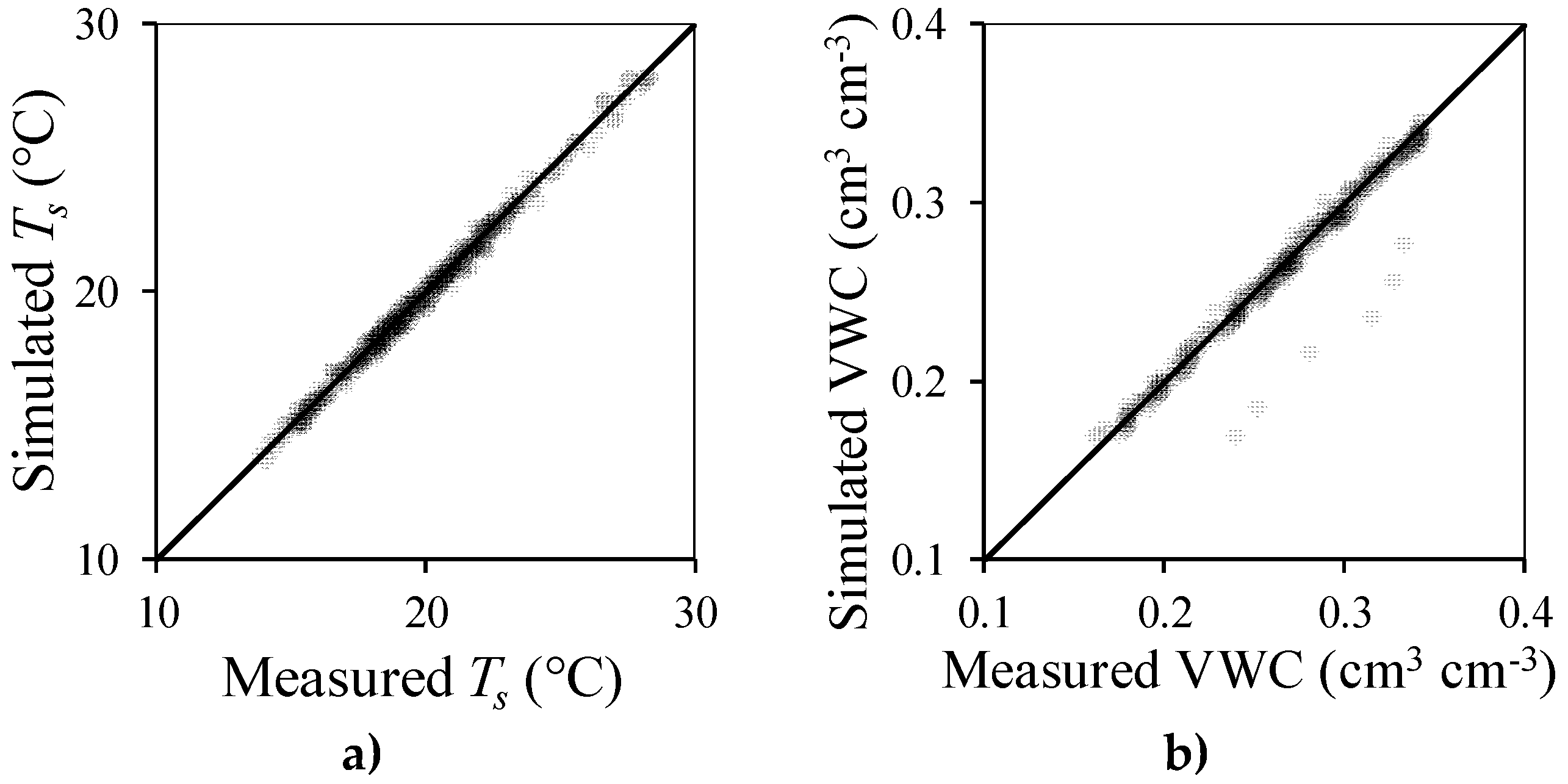
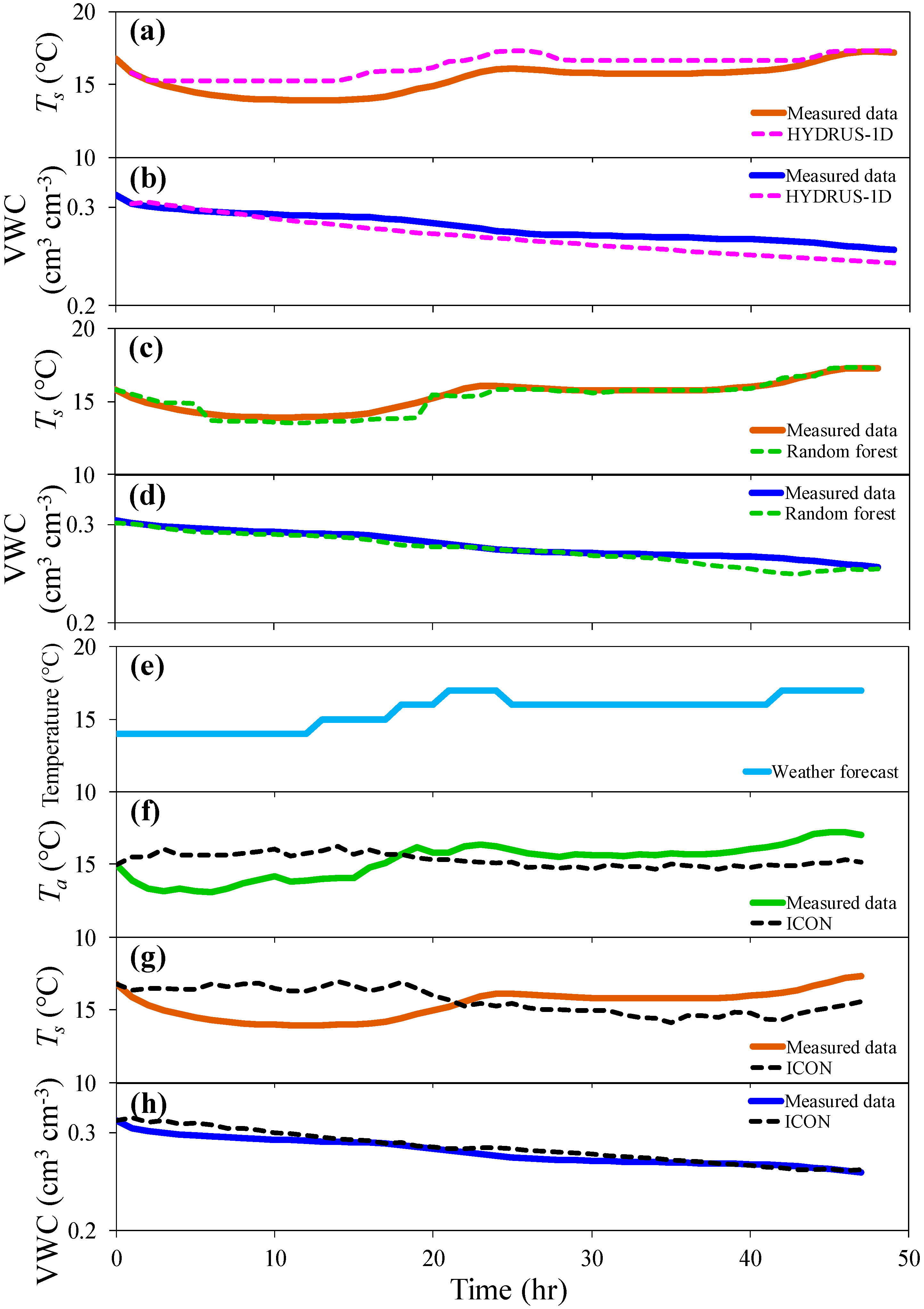
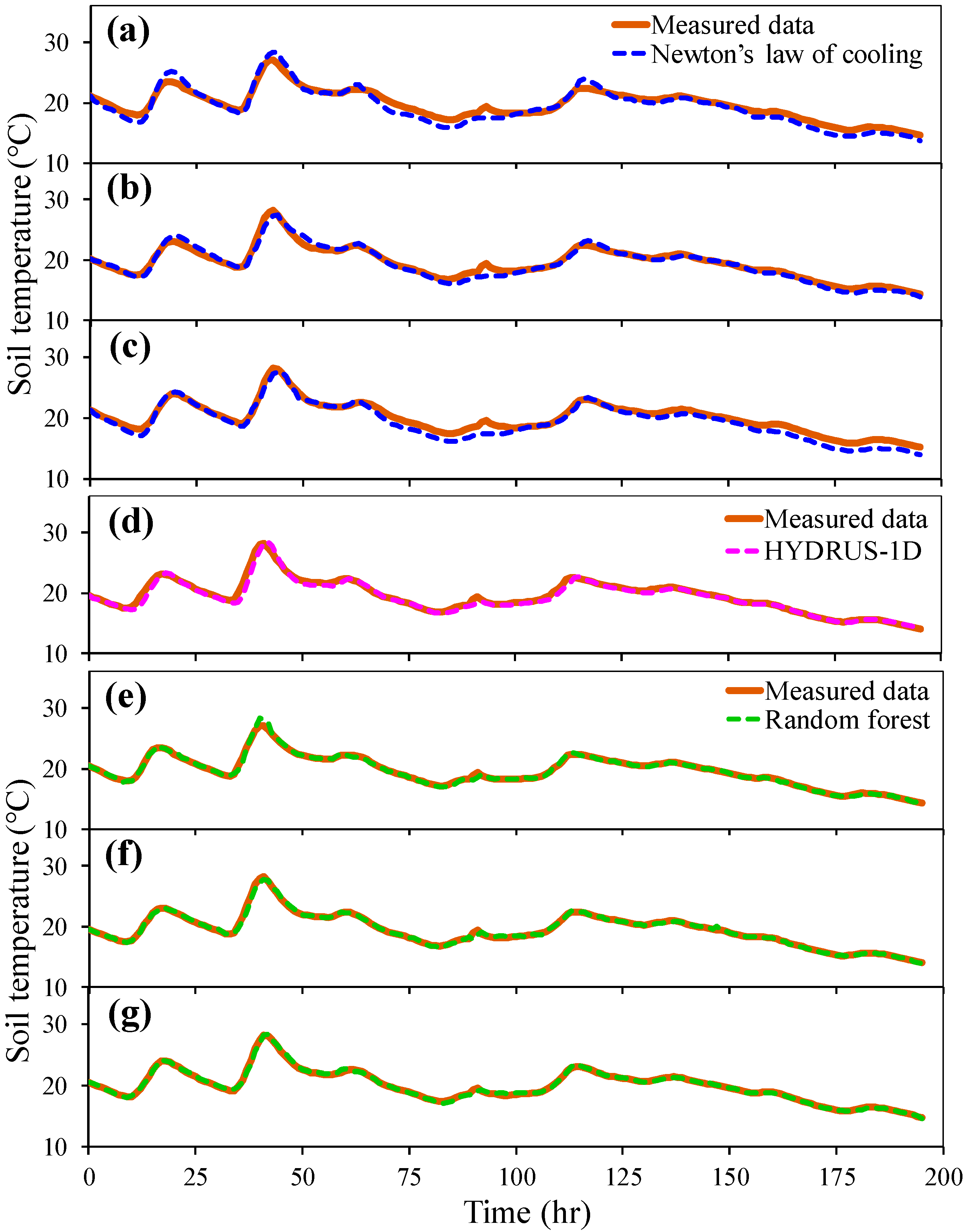
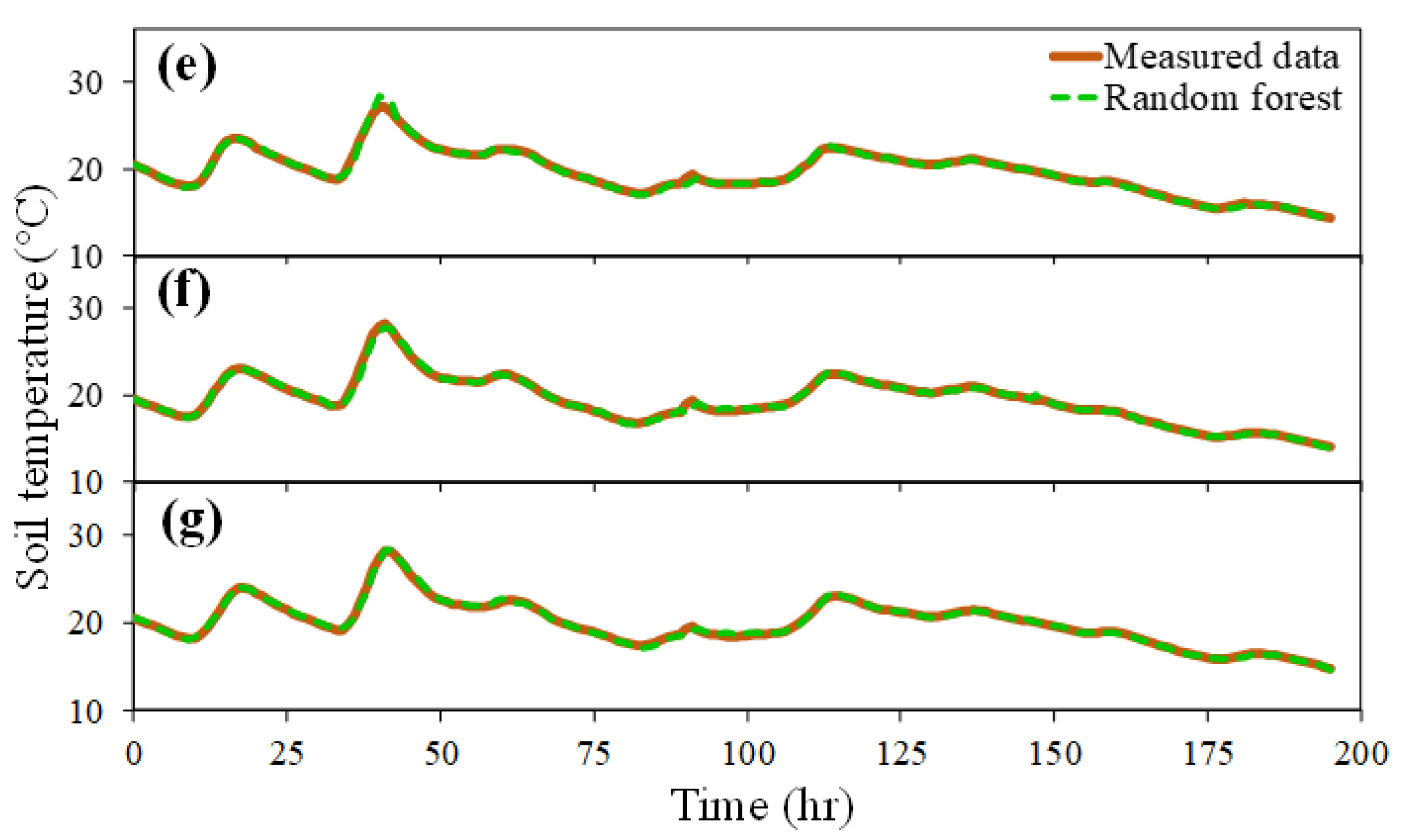
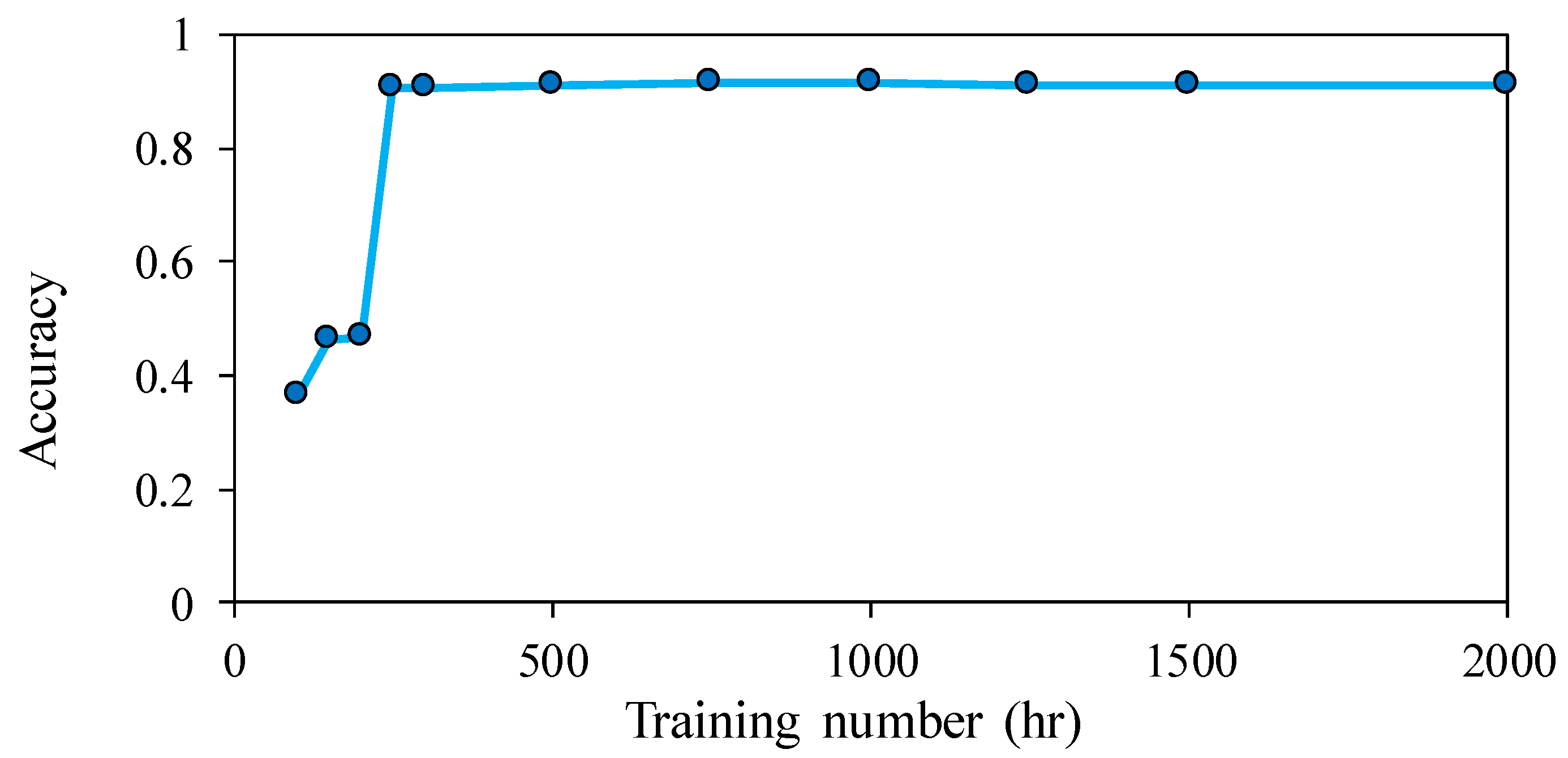
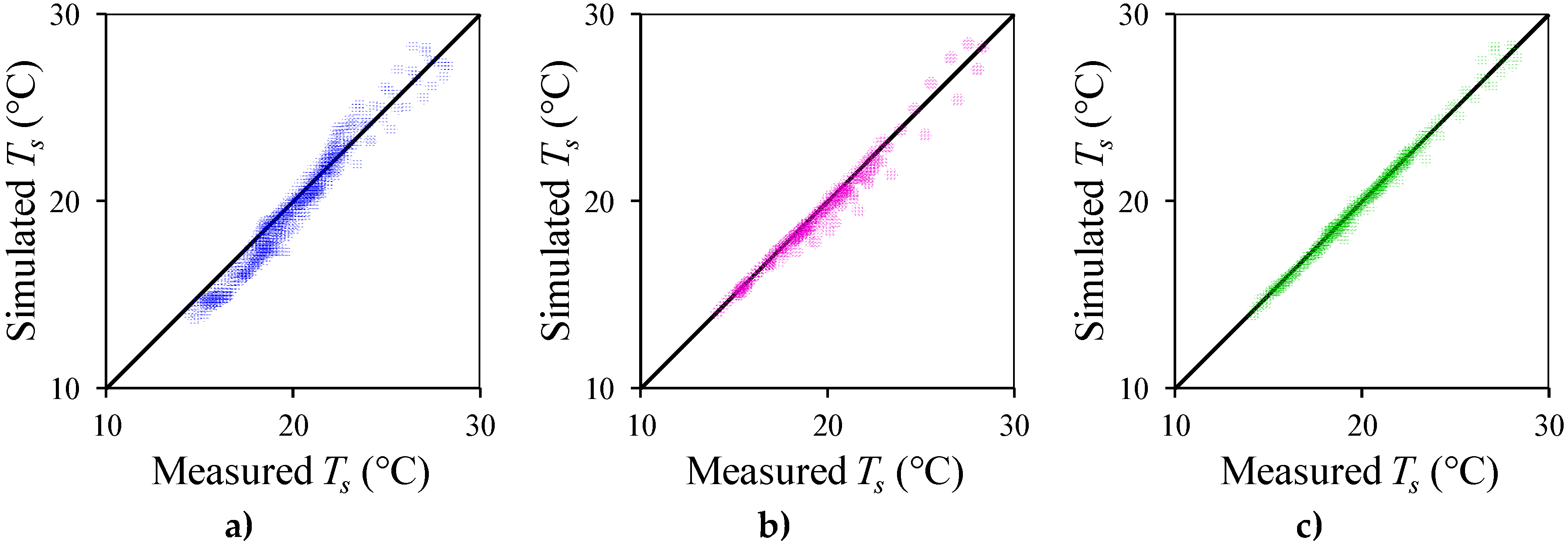
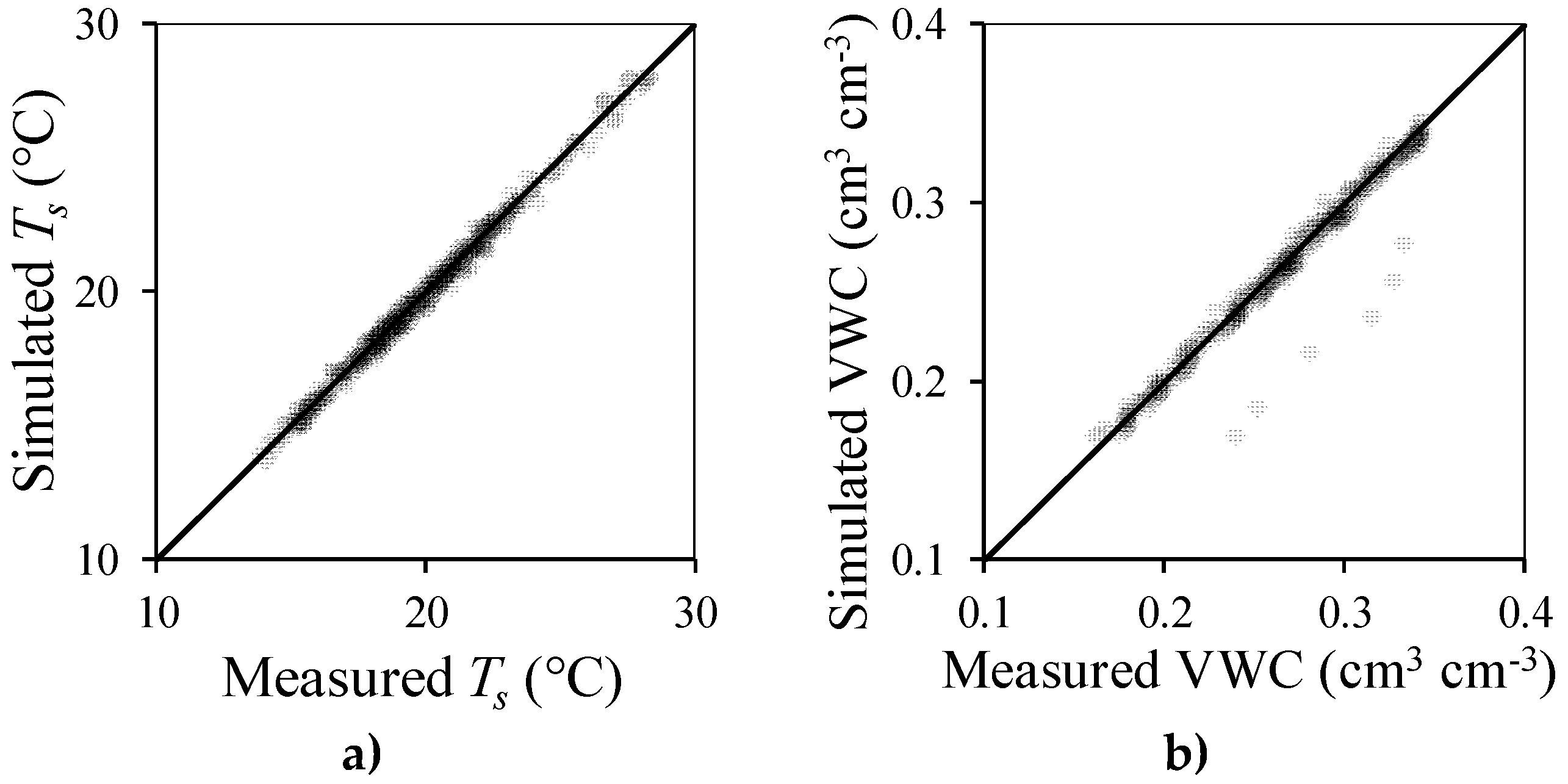
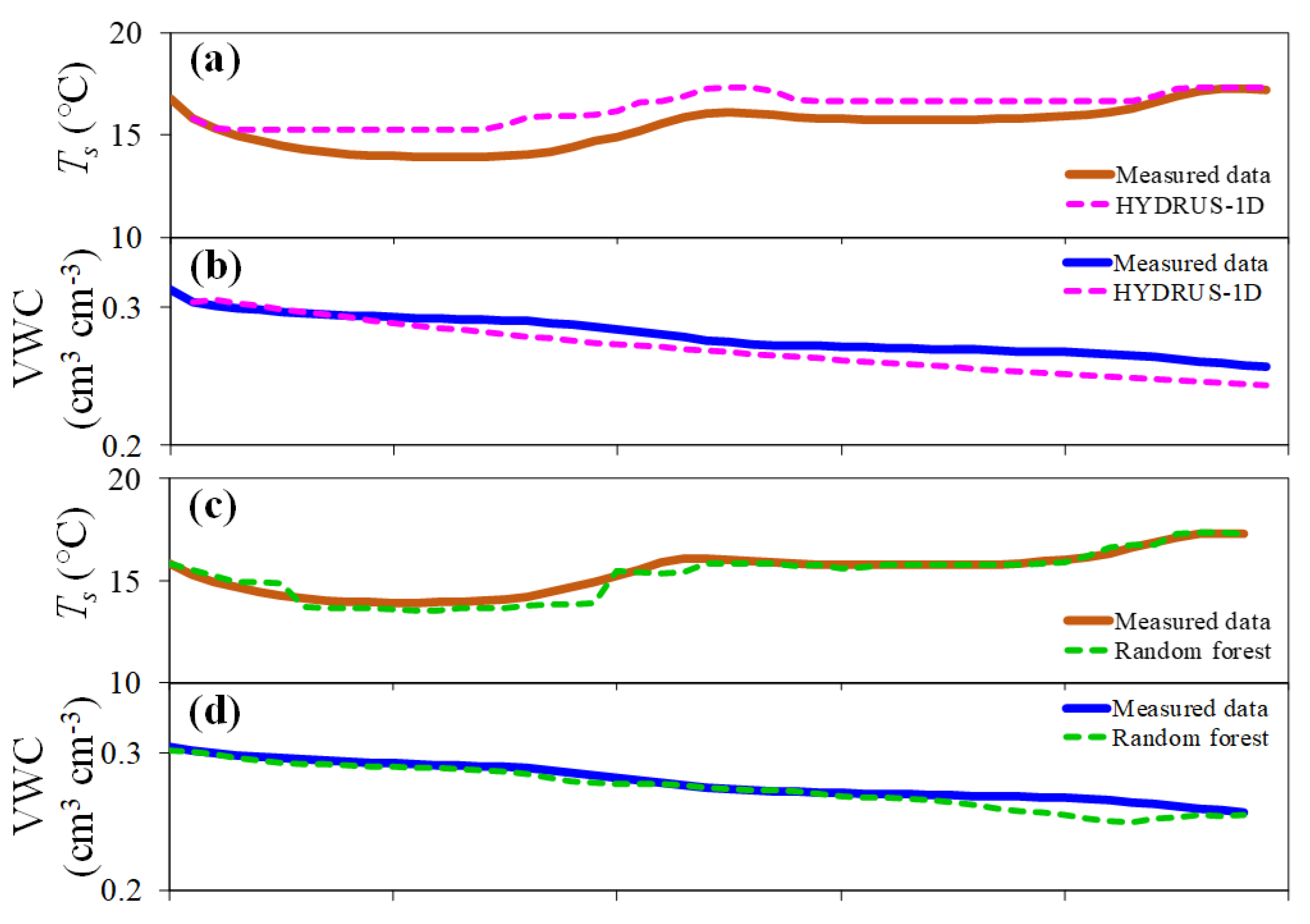
4.1.2. Simulation and Verification of Soil Temperature
4.2. Volumetric Water Content
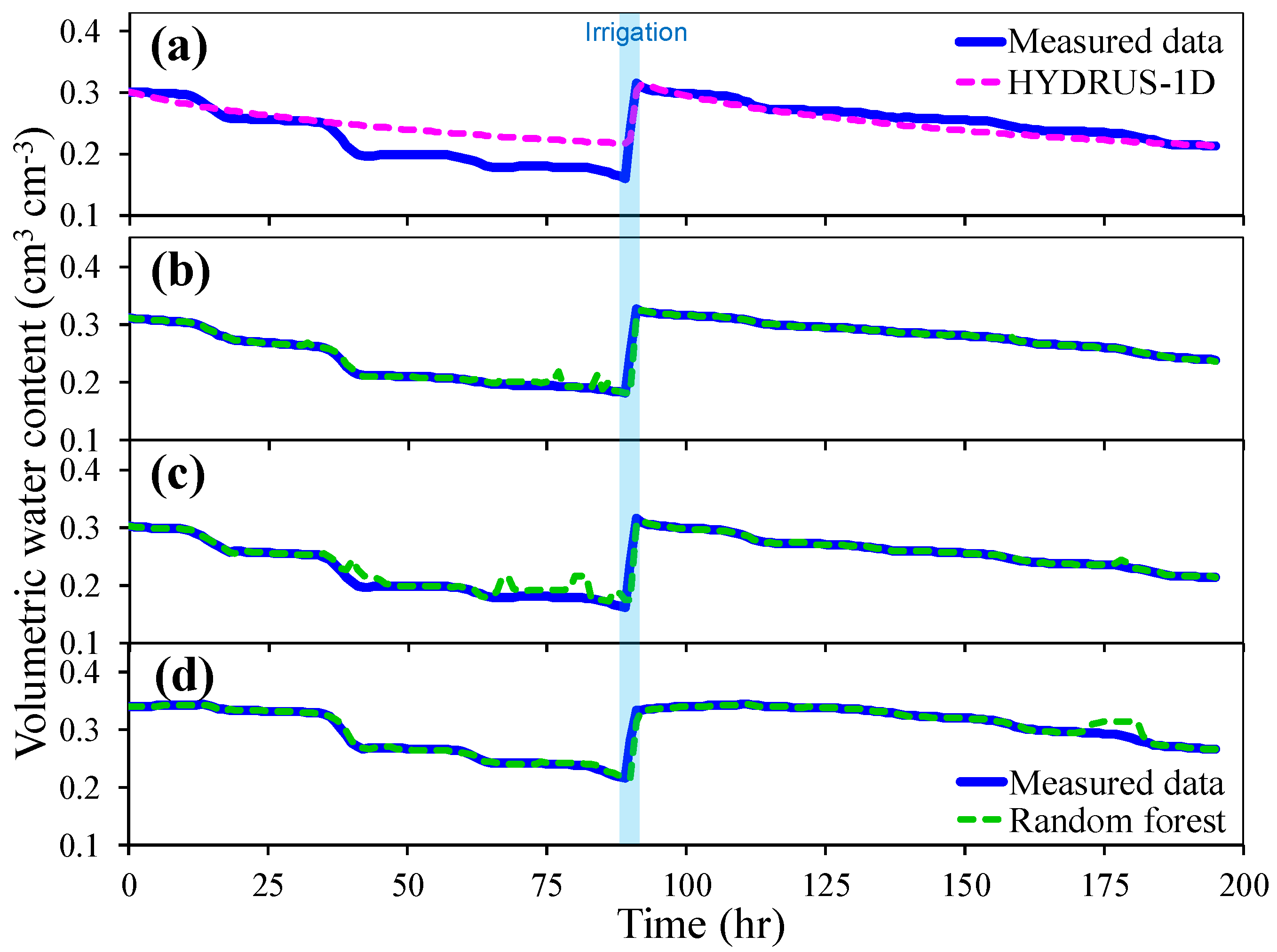
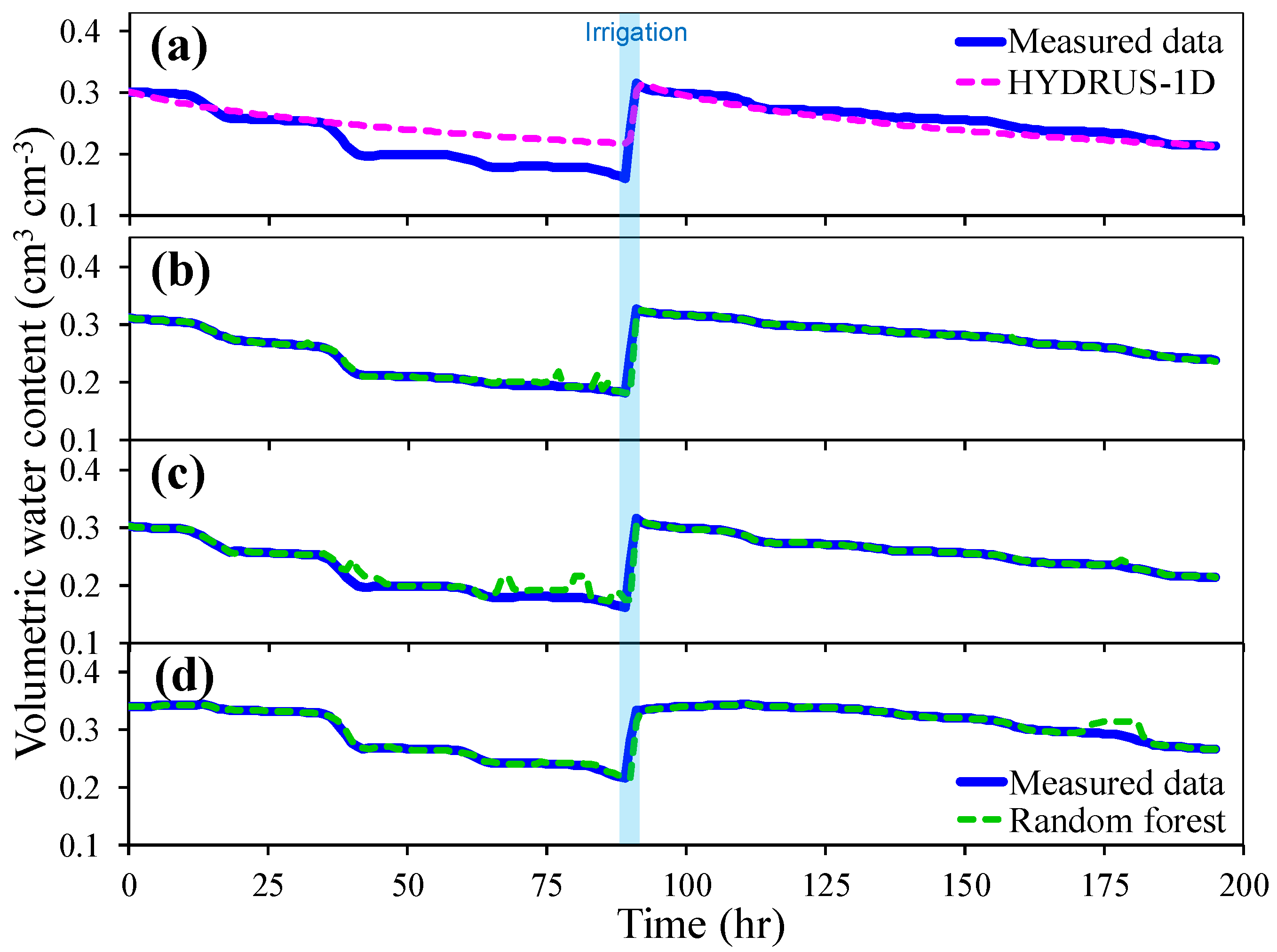
4.2.1. Volumetric Water Content During the Cultivation Period
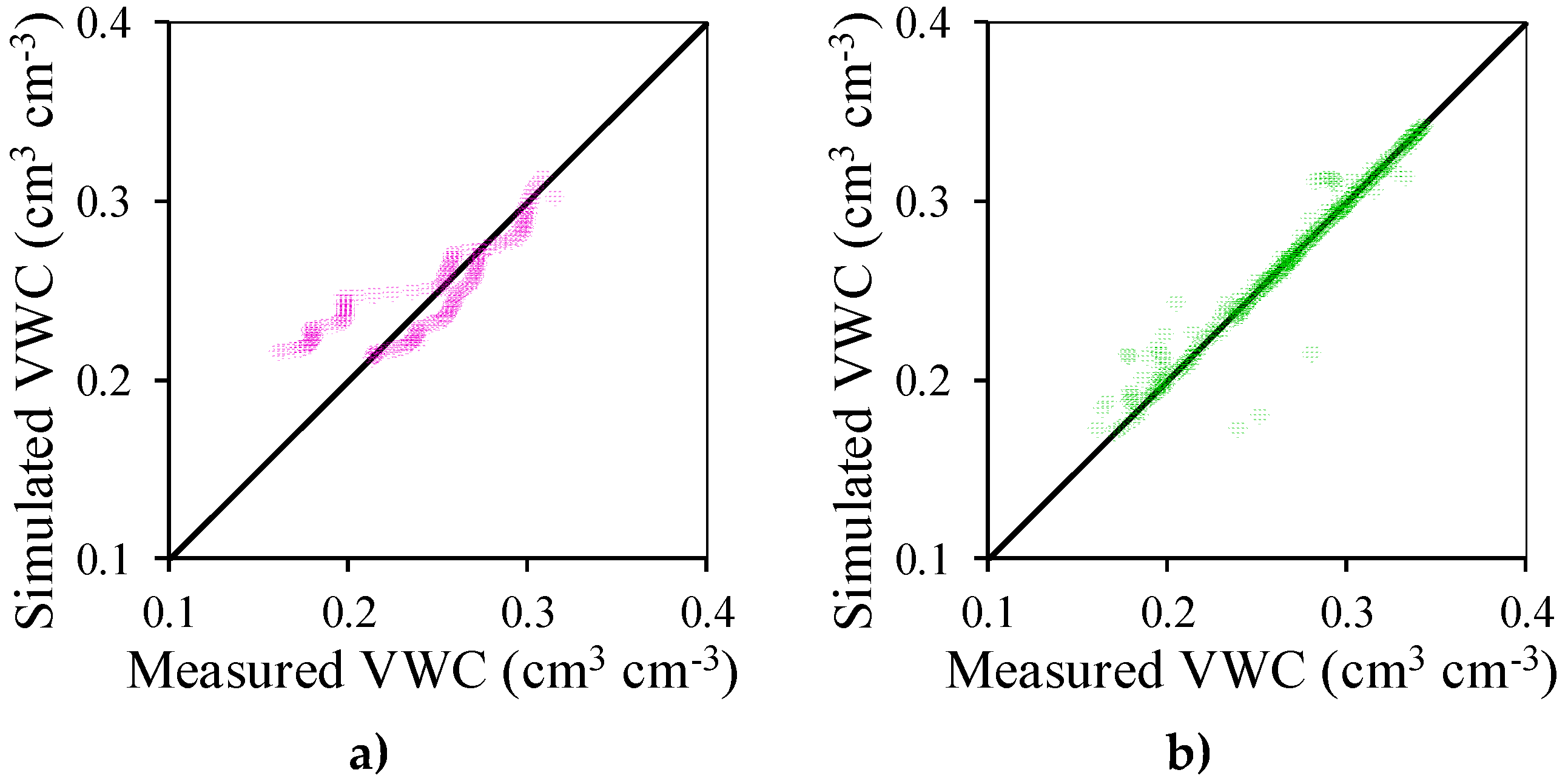
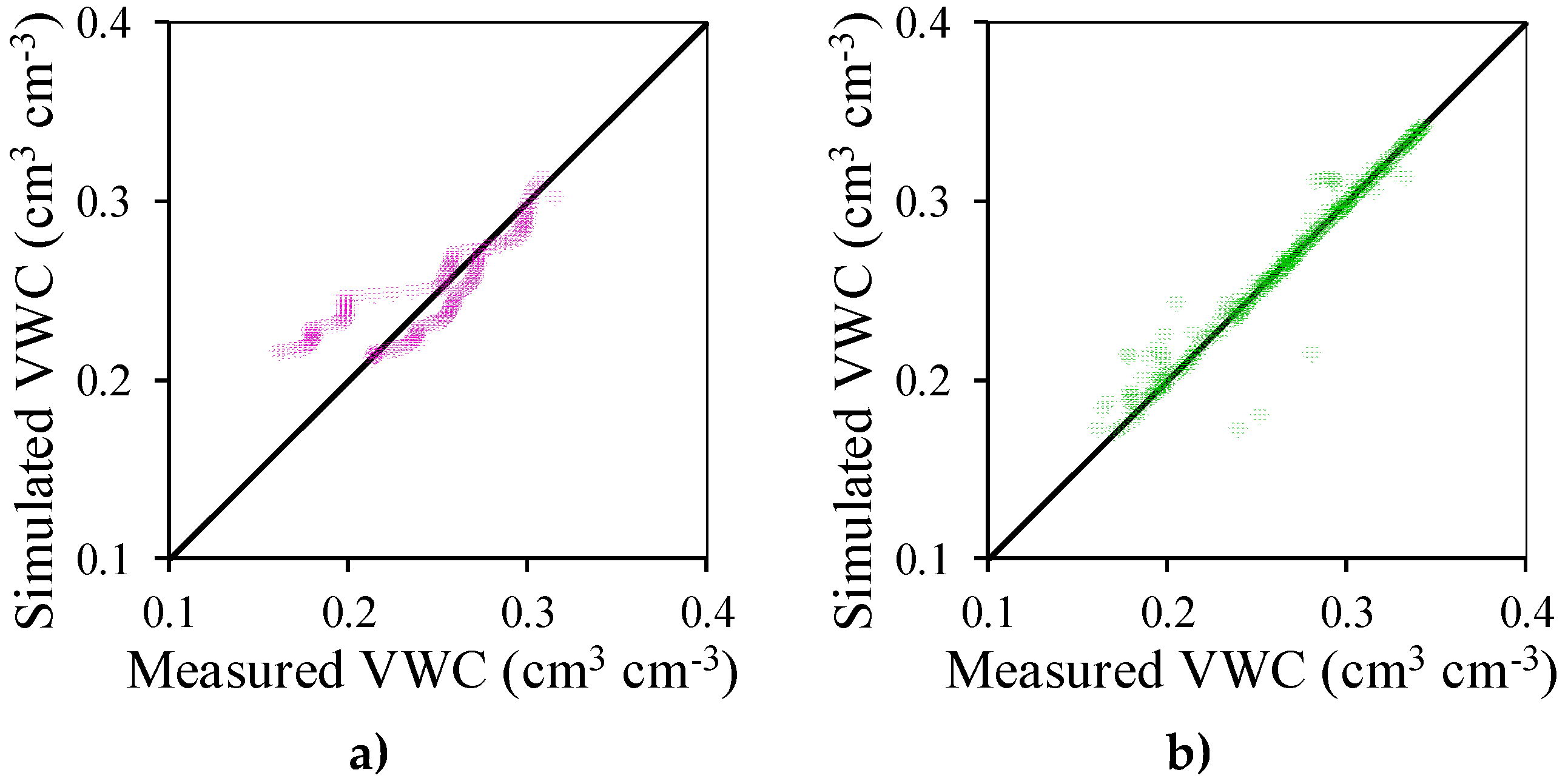
4.2.2. Simulation and Verification of Volumetric Water Content
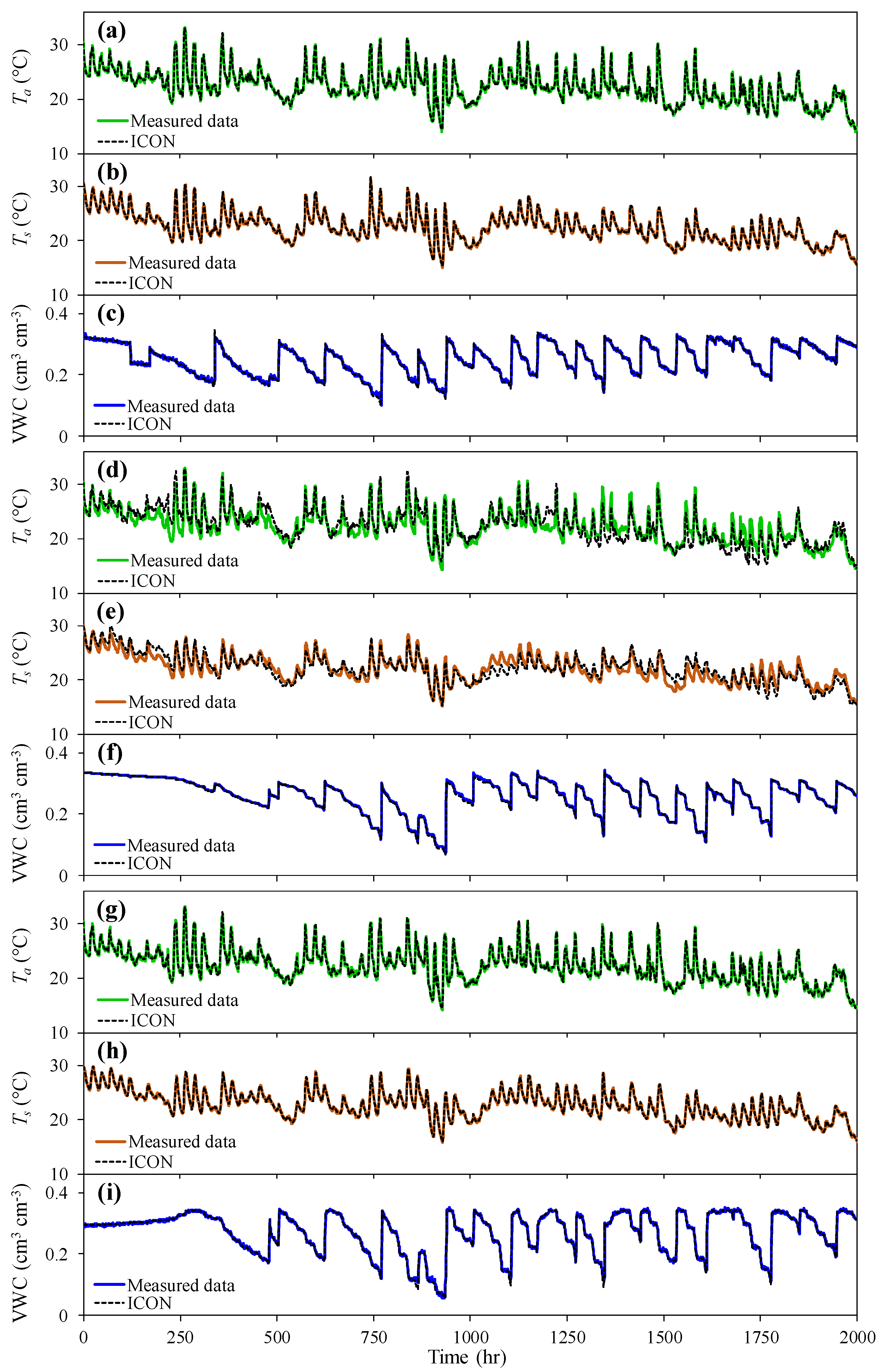
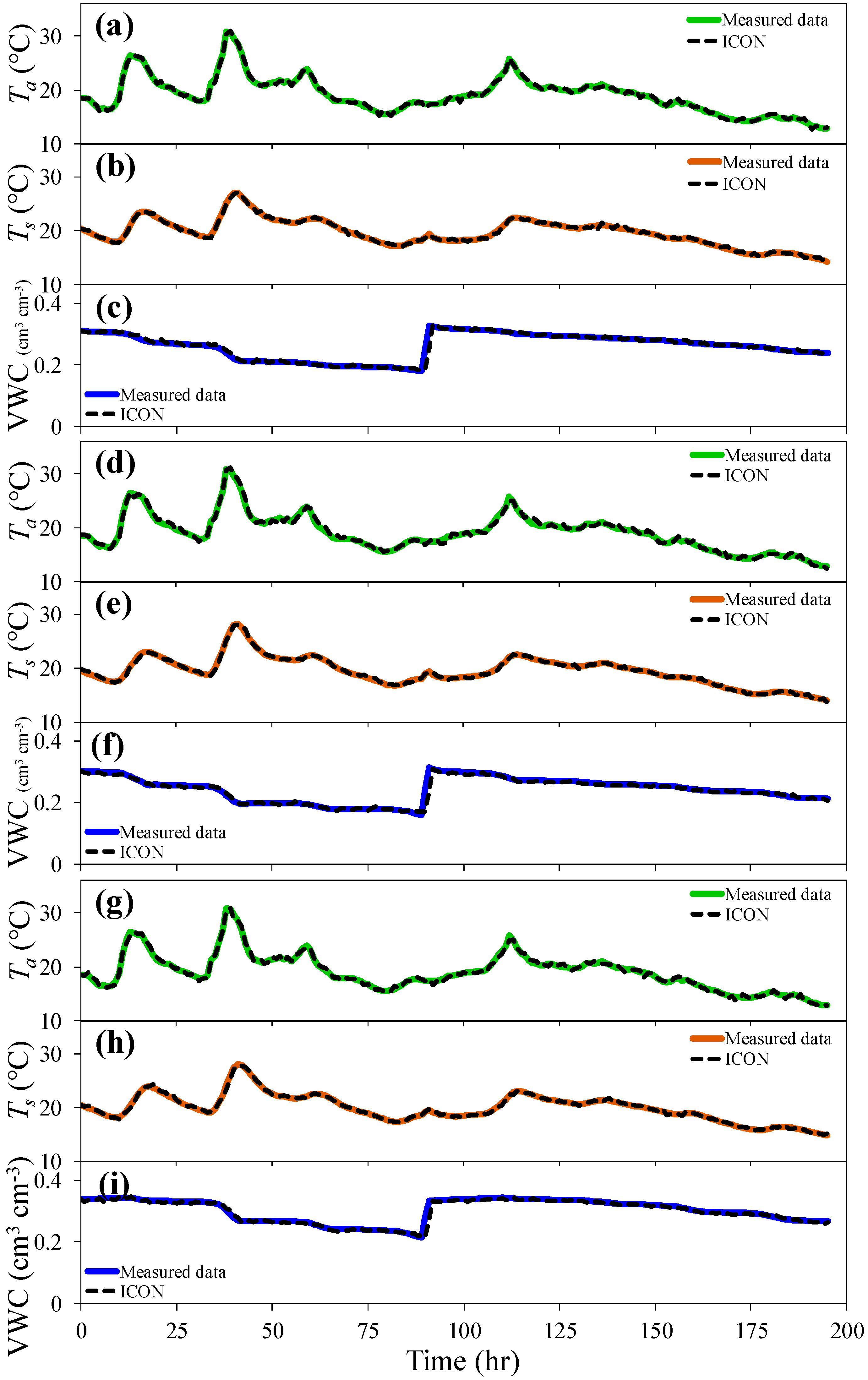
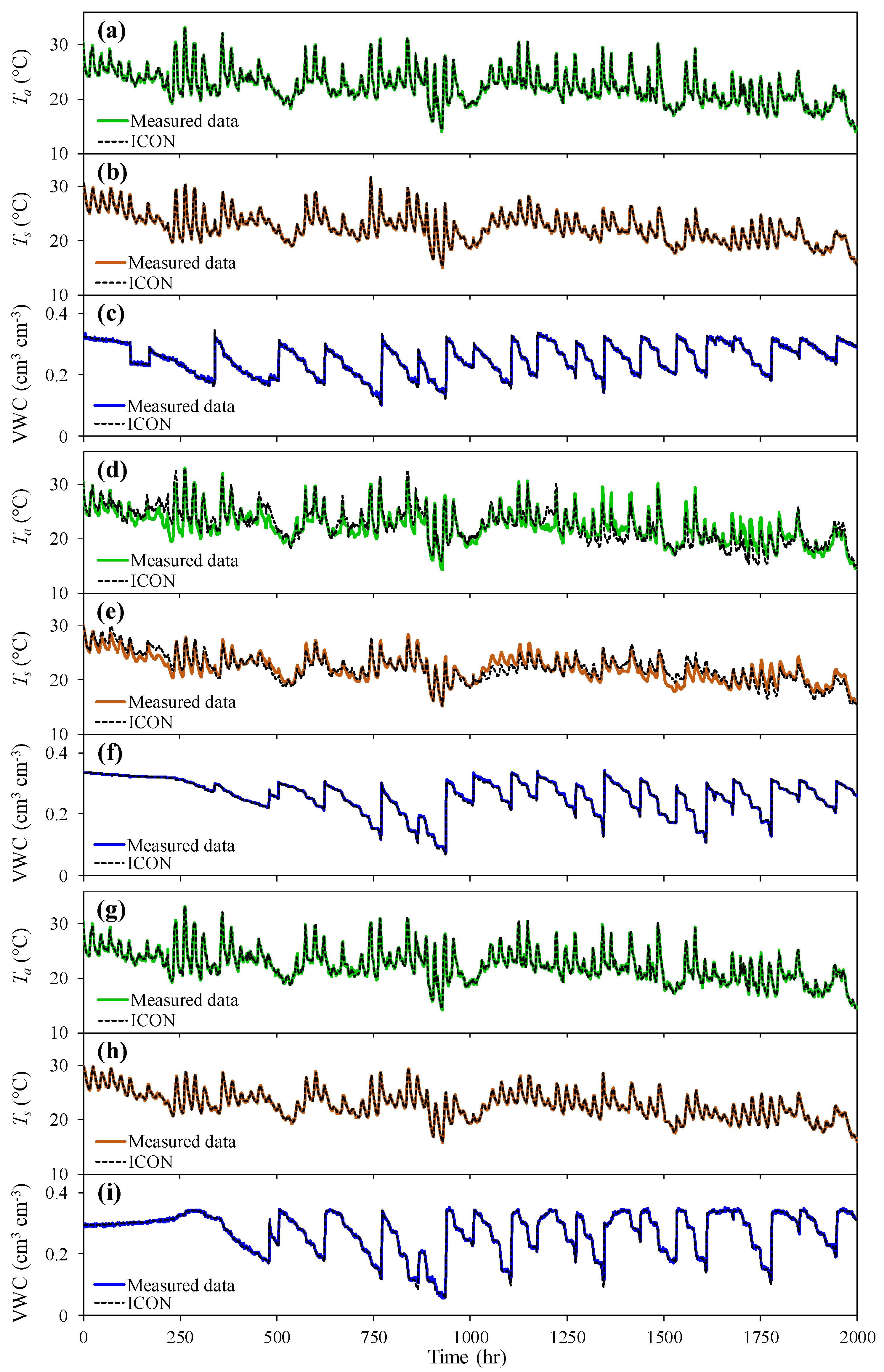
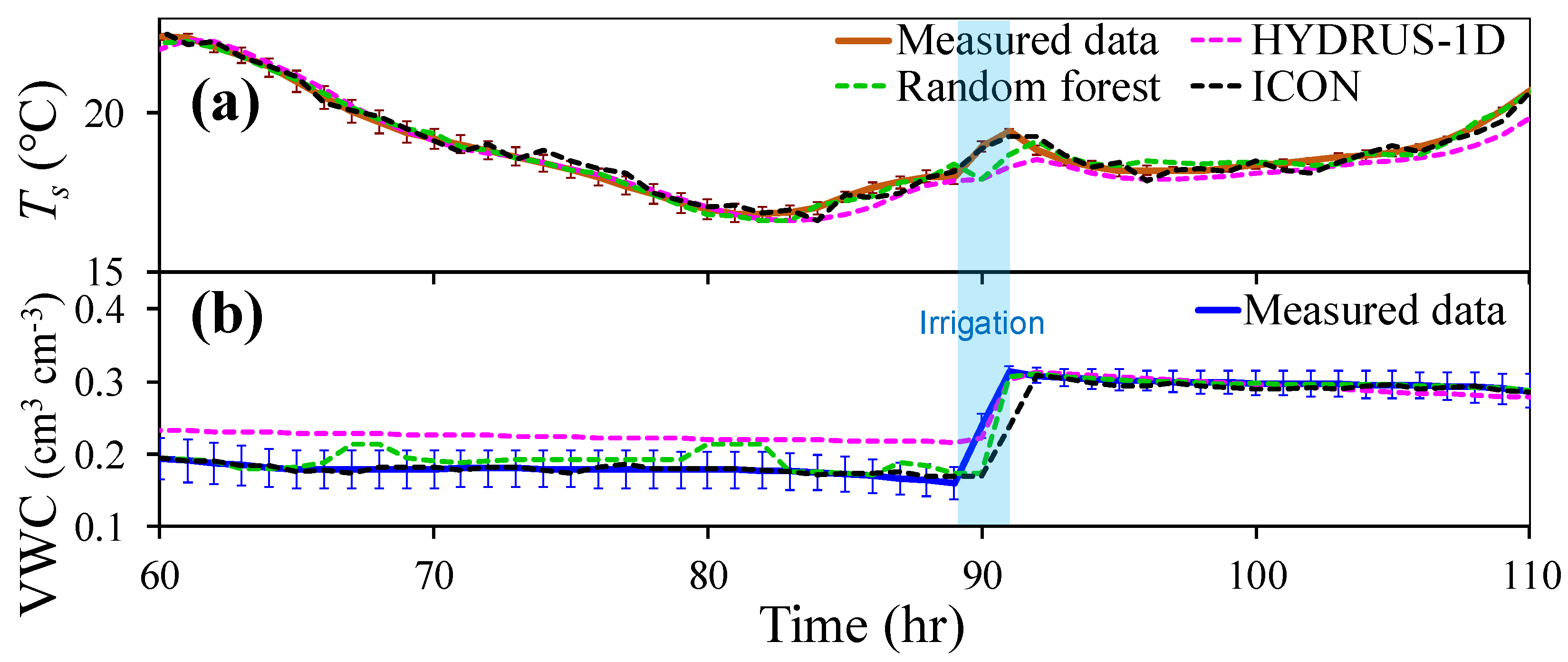
4.3. ICON Simulation Based on Interactions Between Air Temperature, Soil Temperature, and Volumetric Water Content
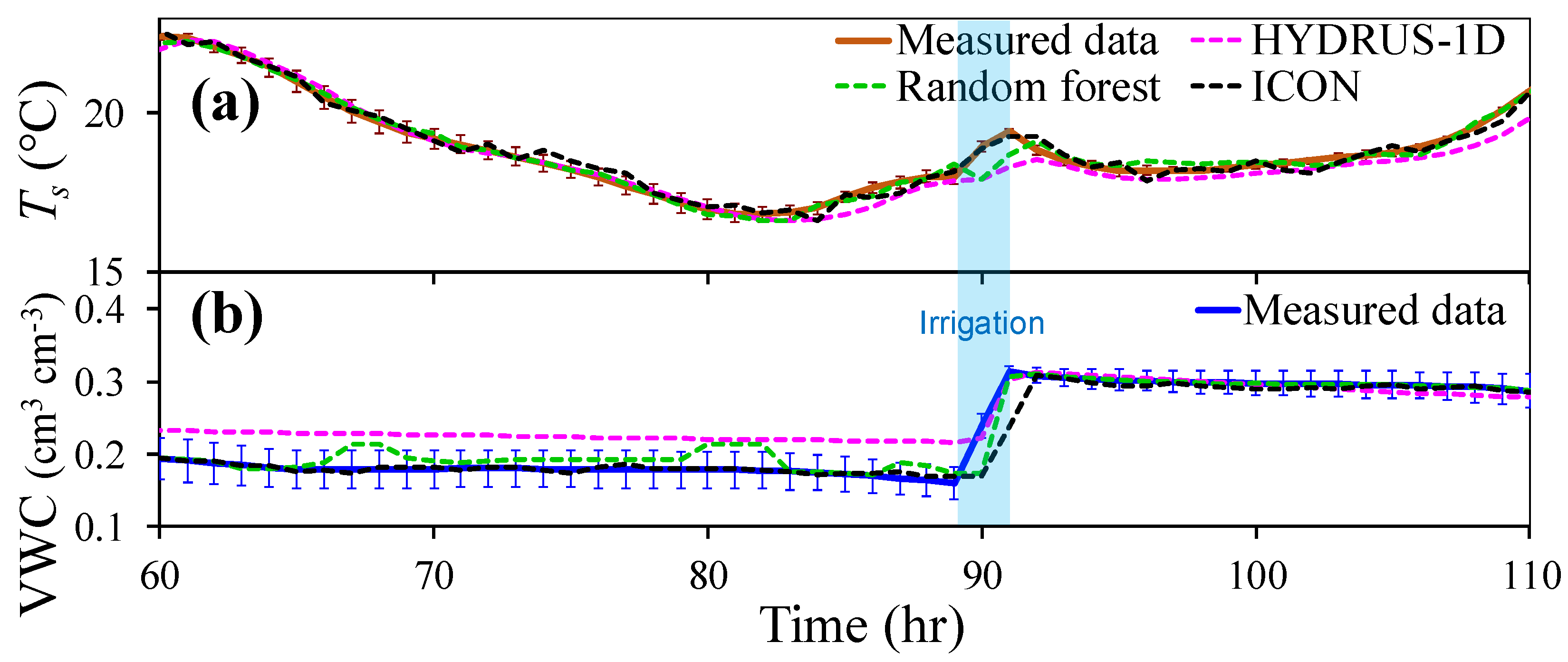
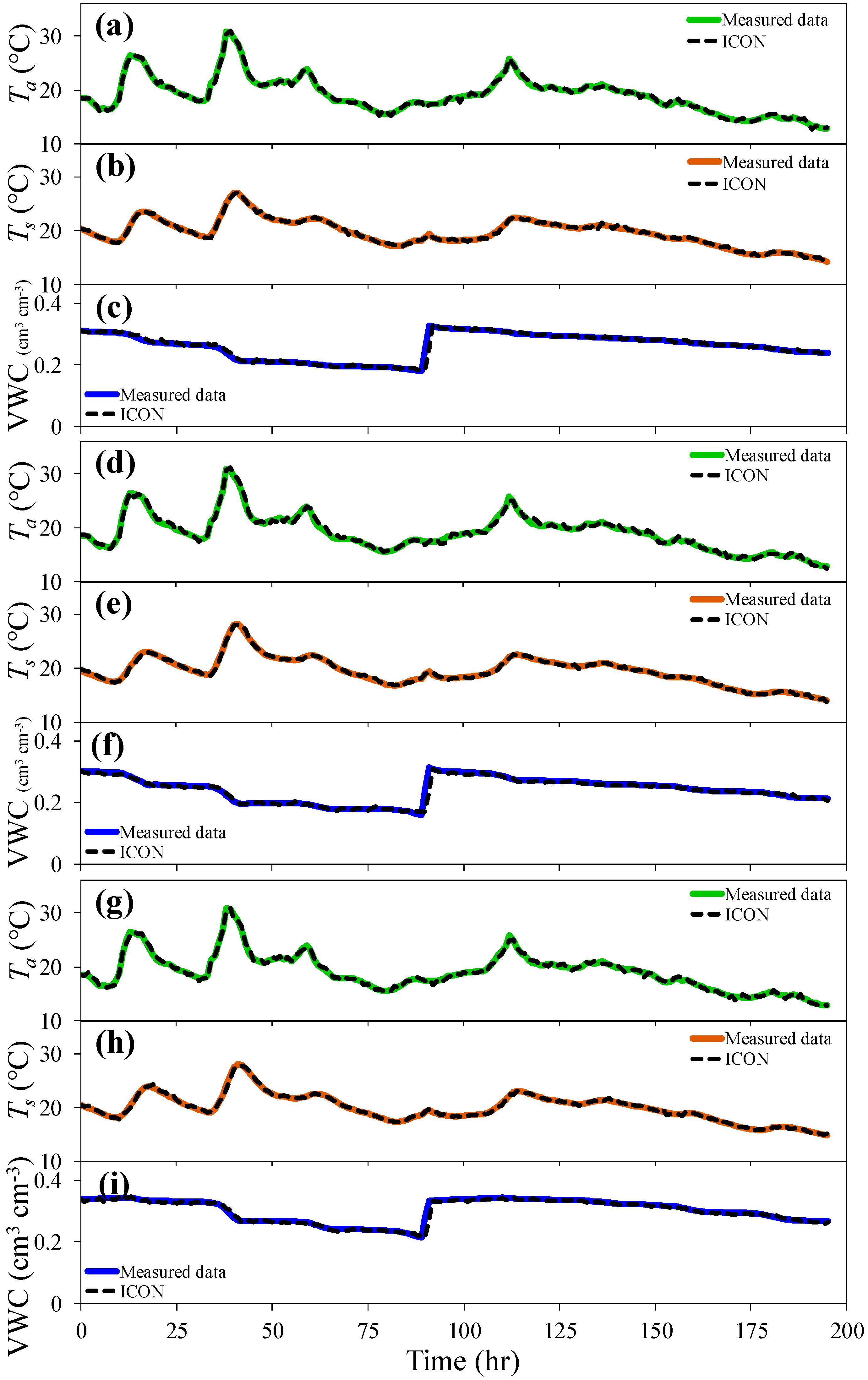
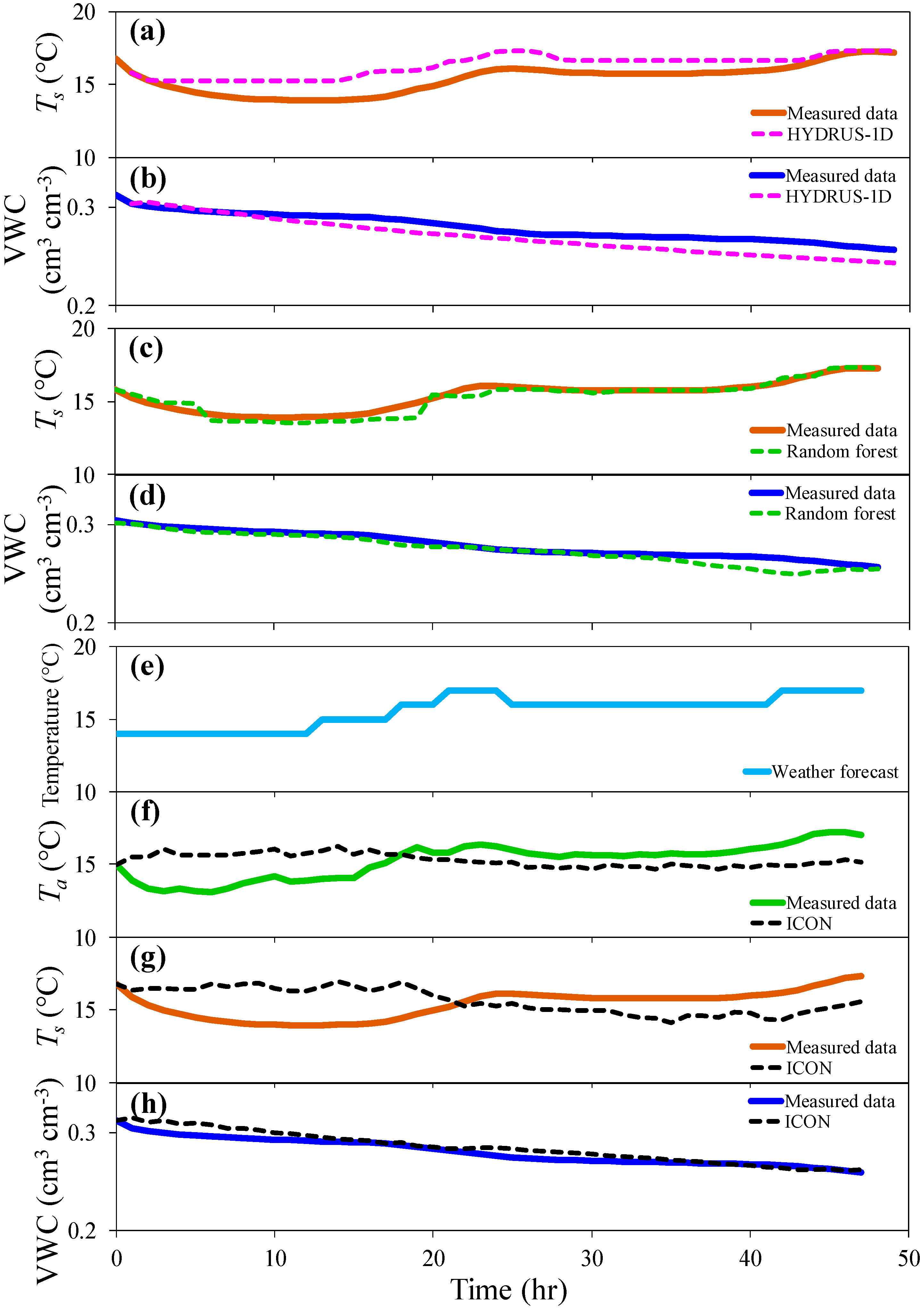
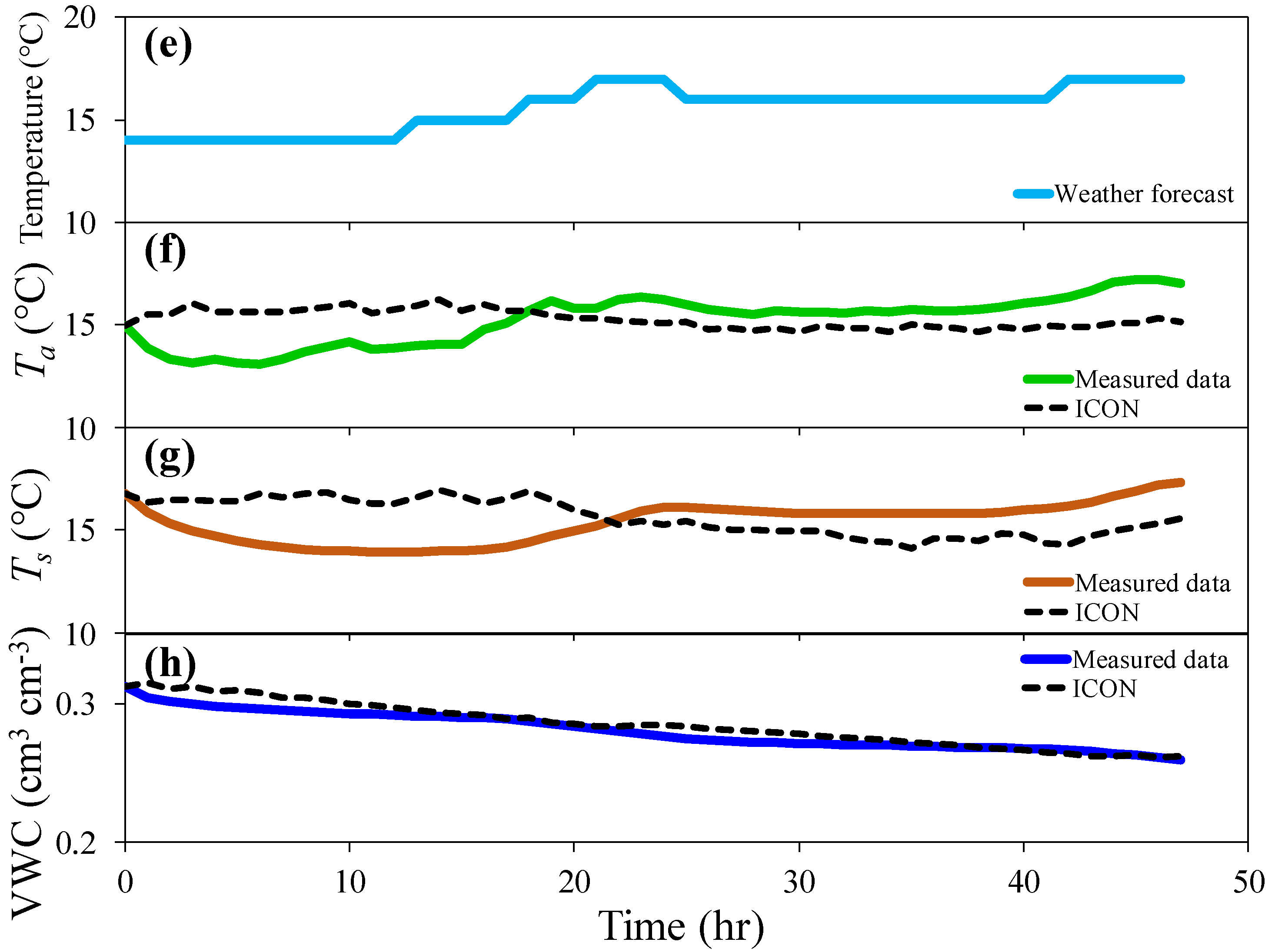
4.4. Prediction of Soil Temperature and Volumetric Water Content from the Air Temperature of the Weather Forecast
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Shannon, H.D.; Motha, R.P. Managing weather and climate risks to agriculture in North America, Central America and the Caribbean. Weather Clim. Extrem. 2015, 10, 50–56. [Google Scholar] [CrossRef] [Green Version]
- Gebbers, R.; Adamchuk, V.I. Precision agriculture and food security. Science 2010, 327, 828–831. [Google Scholar] [CrossRef] [PubMed]
- Zhang, N.Q.; Wang, M.H.; Wang, N. Precision agriculture—A worldwide overview. Comput. Electron. Agric. 2002, 36, 113–132. [Google Scholar] [CrossRef]
- Duarte-Galvan, C.; Torres-Pacheco, I.; Guevara-Gonzalez, R.G.; Romero-Troncoso, R.J.; Contreras-Medina, L.M.; Rios-Alcaraz, M.A.; Mian-Amaraz, J.R. Review. Advantages and disadvantages of control theories applied in greenhouse climate control systems. Span. J. Agric. Res. 2012, 10, 926–938. [Google Scholar] [CrossRef] [Green Version]
- Ehret, D.L.; Lau, A.; Bittman, S.; Lin, W.; Shelford, T. Automated monitoring of greenhouse crops. Agronomie 2001, 21, 403–414. [Google Scholar] [CrossRef]
- Hodge, A.; Berta, G.; Doussan, C.; Merchan, F.; Crespi, M. Plant root growth, architecture and function. Plant. Soil 2009, 321, 153–187. [Google Scholar] [CrossRef]
- Al-Kayssi, A.W.; Al-Karaghouli, A.A.; Hasson, A.M.; Beker, S.A. Influence of soil moisture content on soil temperature and heat storage under greenhouse conditions. J. Agric. Eng. Res. 1990, 45, 241–252. [Google Scholar] [CrossRef]
- Hu, H.; Xu, L.; Wei, R.; Zhu, B. Multi-objective control optimization for greenhouse environment using evolutionary algorithms. Sensors 2011, 11, 5792–5807. [Google Scholar] [CrossRef] [Green Version]
- Philip, J.R. Evaporation, and Moisture and Heat Fields in the Soil. J. Meteorol. 1957, 14, 354–366. [Google Scholar] [CrossRef] [Green Version]
- Nassar, I.N.; Horton, R. Simultaneous transfer of heat, water, and solute in porous media: I. Theoretical development. Soil Sci. Soc. Am. J. 1992, 56, 1350–1356. [Google Scholar] [CrossRef]
- Saito, H.; Šimůnek, J.; Mohanty, B. Numerical analyses of coupled water, vapor and heat transport in the vadose zone. Vadose Zone J. 2006, 5, 784–800. [Google Scholar] [CrossRef] [Green Version]
- Šimůnek, J.; Šejna, M.; Saito, H.; Sakai, M.; van Genuchten, M.T. The HYDRUS-1D Software Package for Simulating the One-Dimensional Movement of Water, Heat, and Multiple Solutes in Variably-Saturated Media; University of California Riverside: Riverside, CA, USA, 2009; p. 296. [Google Scholar]
- Mohri, M.; Rostamizadeh, A.; Talwalkar, A. Foundations of Machine Learning; The MIT Press: Cambridge, MA, USA, 2012; p. 480. [Google Scholar]
- Alzubi, J.; Nayyar, A.; Kumar, A. Machine Learning from Theory to Algorithms: An Overview. J. Phys. Conf. Series 2018, 1142. [Google Scholar] [CrossRef]
- Ahmad, S.; Kalra, A.; Stephen, H. Estimating soil moisture using remote sensing data: A machine learning approach. Adv. Water Resour 2010, 33, 69–80. [Google Scholar] [CrossRef]
- Oroza, C.A.; Bales, R.C.; Stacy, E.M.; Zheng, Z.; Glaser, S.D. Long-Term Variability of Soil Moisture in the Southern Sierra: Measurement and Prediction. Vadose Zone J. 2018, 17. [Google Scholar] [CrossRef]
- Karandish, F.; Šimůnek, J. A comparison of numerical and machine-learning modeling of soil water content with limited input data. J. Hydrol. 2016, 543, 892–909. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Herzog, E.D.; Kiss, I.Z.; Schwartz, W.J.; Bloch, G.; Sebek, M.; Granados-Fuentes, D.; Wang, L.; Li, J.S. Inferring dynamic topology for decoding spatiotemporal structures in complex heterogeneous networks. Proc. Natl. Acad. Sci. USA 2018, 115, 9300–9305. [Google Scholar] [CrossRef] [Green Version]
- Shamshiri, R.R.; Jones, J.W.; Thorp, K.R.; Ahmad, D.; Man, H.C.; Taheri, S. Review of optimum temperature, humidity, and vapour pressure deficit for microclimate evaluation and control in greenhouse cultivation of tomato: A review. Int. Agrophys. 2018, 32, 287–302. [Google Scholar] [CrossRef]
- Moreno, M.M.; Moreno, A. Effect of different biodegradable and polyethylene mulches on soil properties and production in a tomato crop. Sci. Hortic. Amst. 2008, 116, 256–263. [Google Scholar] [CrossRef]
- Li, Y.; Xue, X.; Guo, W.; Wang, L.; Duan, M.; Chen, H.; Chen, F. Soil moisture and nitrate-nitrogen dynamics and economic yield in the greenhouse cultivation of tomato and cucumber under negative pressure irrigation in the North China Plain. Sci. Rep. 2019, 9, 4439. [Google Scholar] [CrossRef]
- Chen, R.Q.; Kang, S.Z.; Hao, X.M.; Li, F.S.; Du, T.S.; Qiu, R.J.; Chen, J.L. Variations in tomato yield and quality in relation to soil properties and evapotranspiration under greenhouse condition. Sci. Hortic. Amst. 2015, 197, 318–328. [Google Scholar] [CrossRef]
- Sun Gro Horticulture Distribution Inc. Safety Data Sheet: Sunshine® Professional Peat Moss and Peat-Based Mixes. 2015. Available online: http://www.sungro.com/professional-product/sunshine-5-natural-organic (accessed on 28 August 2018).
- Besson, U. The History of the Cooling Law: When the Search for Simplicity can be an Obstacle. Sci. Educ. 2010, 21, 1085–1110. [Google Scholar] [CrossRef]
- Šimůnek, J.; van Genuchten, M.T.; Šejna, M. Recent developments and applications of the HYDRUS computer software packages. Vadose Zone J. 2016, 15, 1–25. [Google Scholar] [CrossRef] [Green Version]
- Campbell, G.S. Soil Physics With BASIC: Transport. Models for Soil-Plant. Systems; Elsevier: Amsterdam, The Netherlands, 1985; p. 150. [Google Scholar]
- Chung, S.O.; Horton, R. Soil Heat and Water-Flow with a Partial Surface Mulch. Water Resour. Res. 1987, 23, 2175–2186. [Google Scholar] [CrossRef] [Green Version]
- van Genuchten, M.T. A closed-form equation for predicting the hydraulic conductivity of unsaturated soils. Soil Sci. Soc. Am. J. 1980, 44, 892–898. [Google Scholar] [CrossRef] [Green Version]
- Mualem, Y. A new model for predicting the hydraulic conductivity of unsaturated porous media. Water Resour Res. 1976, 12, 513–522. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Bagging predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef] [Green Version]
- Dietterich, T.G. Ensemble Methods in Machine Learning. In Multiple Classifier Systems, MCS 2000; Kittler, J., Roli, F., Eds.; Springer: Berlin/Heidelberg, Germany; Cagliari, Italy, 2000; pp. 1–15. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Perreault, S.; Chokmani, K.; Nolin, M.C.; Bourgeois, G. Validation of a soil temperature and moisture model in southern Quebec, Canada. Soil Sci. Soc. Am. J. 2013, 77, 606–617. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Models | Parameters | Inputs | Outputs |
|---|---|---|---|
| Newton’s law of cooling | hr−1 | For temperature: , , I.C.†: , | |
| HYDRUS-1D | cm−1, , , cm3 cm−3, cm3 cm−3, , cm day−1, cm, W cm-1 K−1, W cm−1 K−1, W cm−1 K−1, , cm, cm3 cm−3 s−1, J cm−3 K−1, J cm−3 K−1 | For temperature: , , I.C.: , B.C.‡: soil temperature and matric potential for upper and lower boundaries | |
| For volumetric water content (VWC): , I.C.: B.C.: matric potential for upper and lower boundaries | |||
| Random forest | n_estimators = 100, max_depth = unlimited, min_samples_split = 2 | For temperature: , , I.C.: , | |
| For VWC:, , , , , I.C.: , , , | |||
| Inferring connections of networks (ICON) | , (simulation) or 4 (prediction), (for ); (for ); (for VWC) | For temperature and VWC: , , , forecasted outdoor air temperature as the fourth input factor for prediction stage I.C.: , , | , , |
| Models | RMSE | NSE | ||
|---|---|---|---|---|
| Soil Temperature (°C) | VWC (cm3 cm−3) | Soil Temperature (°C) | VWC (cm3 cm−3) | |
| Newton’s law of cooling | 0.763 ± 0.133 | - | 0.905 ± 0.033 | - |
| HYDRUS-1D | 0.469 | 0.024 | 0.970 | 0.626 |
| Random forest | 0.201 ± 0.020 | 0.008 ± 0.001 | 0.994 ± 0.001 | 0.961 ± 0.014 |
| ICON | 0.206 ± 0.006 | 0.008 ± 0.001 | 0.994 ± 0.001 | 0.962 ± 0.004 |
| Models | Inputs | Outputs |
|---|---|---|
| HYDRUS-1D | For air temperature: (linear regression) forecasted outdoor air temperature: | converted indoor air temperature: |
| For soil temperature: (linear regression) | soil temperature of upper and lower boundaries: and | |
| Random forest | For air temperature and VWC: forecasted outdoor air temperature, 24-h time, ultraviolet index (UVI) | |
| ICON | The forecasted outdoor air temperature as the fourth input factor | |
| Models | RMSE | NSE | ||
|---|---|---|---|---|
| Soil Temperature (°C) | VWC (cm3 cm−3) | Soil Temperature (°C) | VWC (cm3 cm−3) | |
| HYDRUS-1D | 1.006 | 0.011 | −0.020 | 0.342 |
| Random forest | 0.333 | 0.006 | 0.889 | 0.795 |
| ICON | 1.701 | 0.006 | −2.813 | 0.850 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsai, Y.-Z.; Hsu, K.-S.; Wu, H.-Y.; Lin, S.-I.; Yu, H.-L.; Huang, K.-T.; Hu, M.-C.; Hsu, S.-Y. Application of Random Forest and ICON Models Combined with Weather Forecasts to Predict Soil Temperature and Water Content in a Greenhouse. Water 2020, 12, 1176. https://doi.org/10.3390/w12041176
Tsai Y-Z, Hsu K-S, Wu H-Y, Lin S-I, Yu H-L, Huang K-T, Hu M-C, Hsu S-Y. Application of Random Forest and ICON Models Combined with Weather Forecasts to Predict Soil Temperature and Water Content in a Greenhouse. Water. 2020; 12(4):1176. https://doi.org/10.3390/w12041176
Chicago/Turabian StyleTsai, Yi-Zhih, Kan-Sheng Hsu, Hung-Yu Wu, Shu-I Lin, Hwa-Lung Yu, Kuo-Tsang Huang, Ming-Che Hu, and Shao-Yiu Hsu. 2020. "Application of Random Forest and ICON Models Combined with Weather Forecasts to Predict Soil Temperature and Water Content in a Greenhouse" Water 12, no. 4: 1176. https://doi.org/10.3390/w12041176