A Ghost-Cell Immersed Boundary Method for Wave–Structure Interaction Using a Two-Phase Flow Model



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Numerical Model
2.1. Governing Equation
2.2. Level Set Method
2.3. Numerical Scheme Based on Projection Method
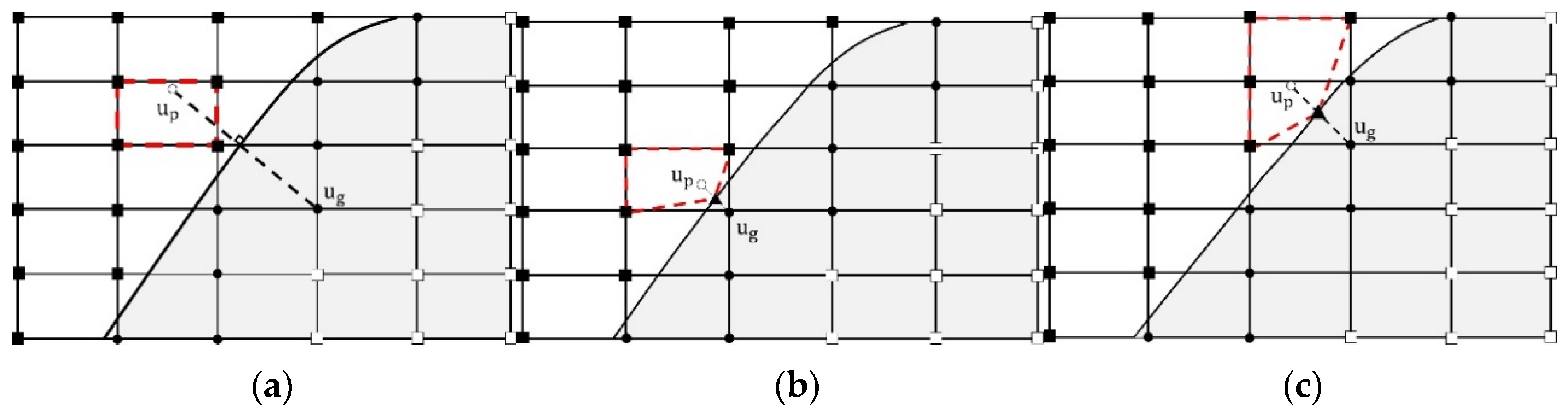
2.4. Evaluation of Forcing Term and Ghost Cell
2.5. The Numerical Procedure
- Equation (9) is solved to obtain the intermediate velocity without consideration of the forcing term . However, at this moment does not satisfy the boundary condition at the rigid body surface.
- The velocity at the forcing point is computed using the interpolation method and hence the forcing term in Equation (12) is obtained.
- Equation (9) is recalculated to provide a new . As the forcing term and intermediate velocity are implicit variables, an iterative scheme between steps 2 and 3 is used to ensure the convergence of both and .
- Pressure is computed via the Pressure Poisson equation of Equation (10).
- The velocity is corrected using Equation (11).
- In the successive time step, the velocity, forcing function, and pressure calculated from the previous time step are employed to be the initial conditions. The above explained procedure is iterated until the required time step is completed.
3. Results and Discussion
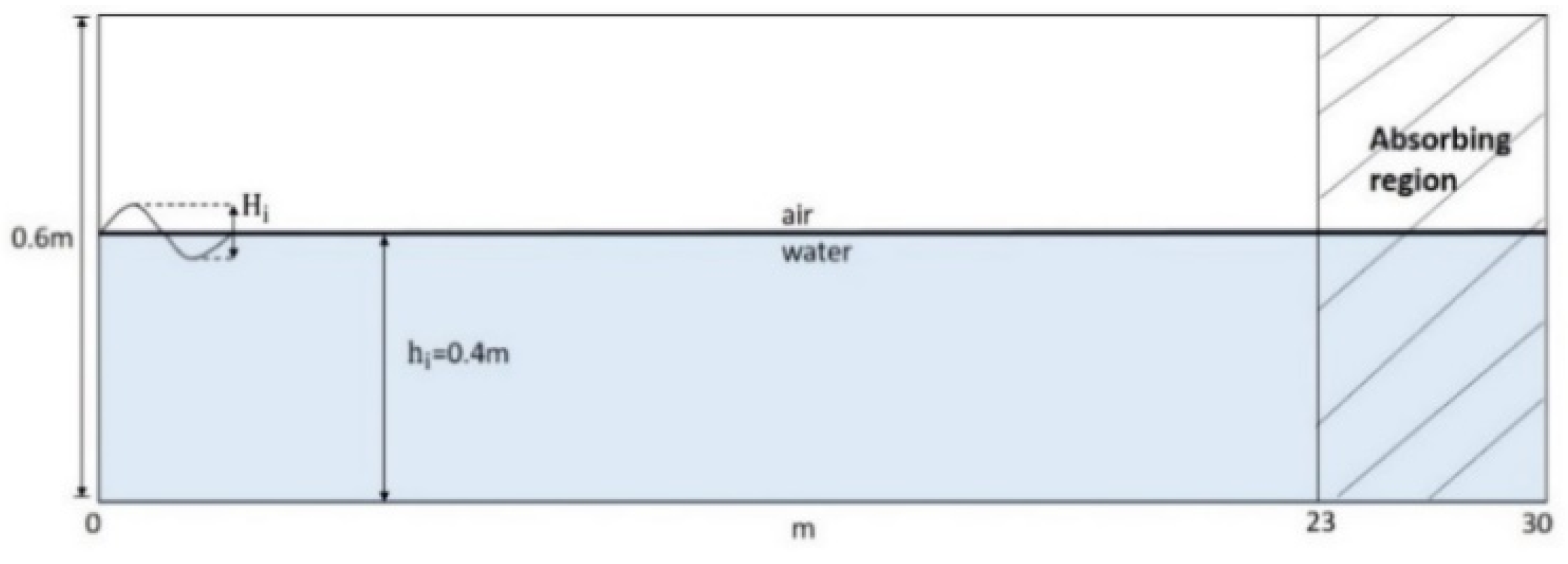
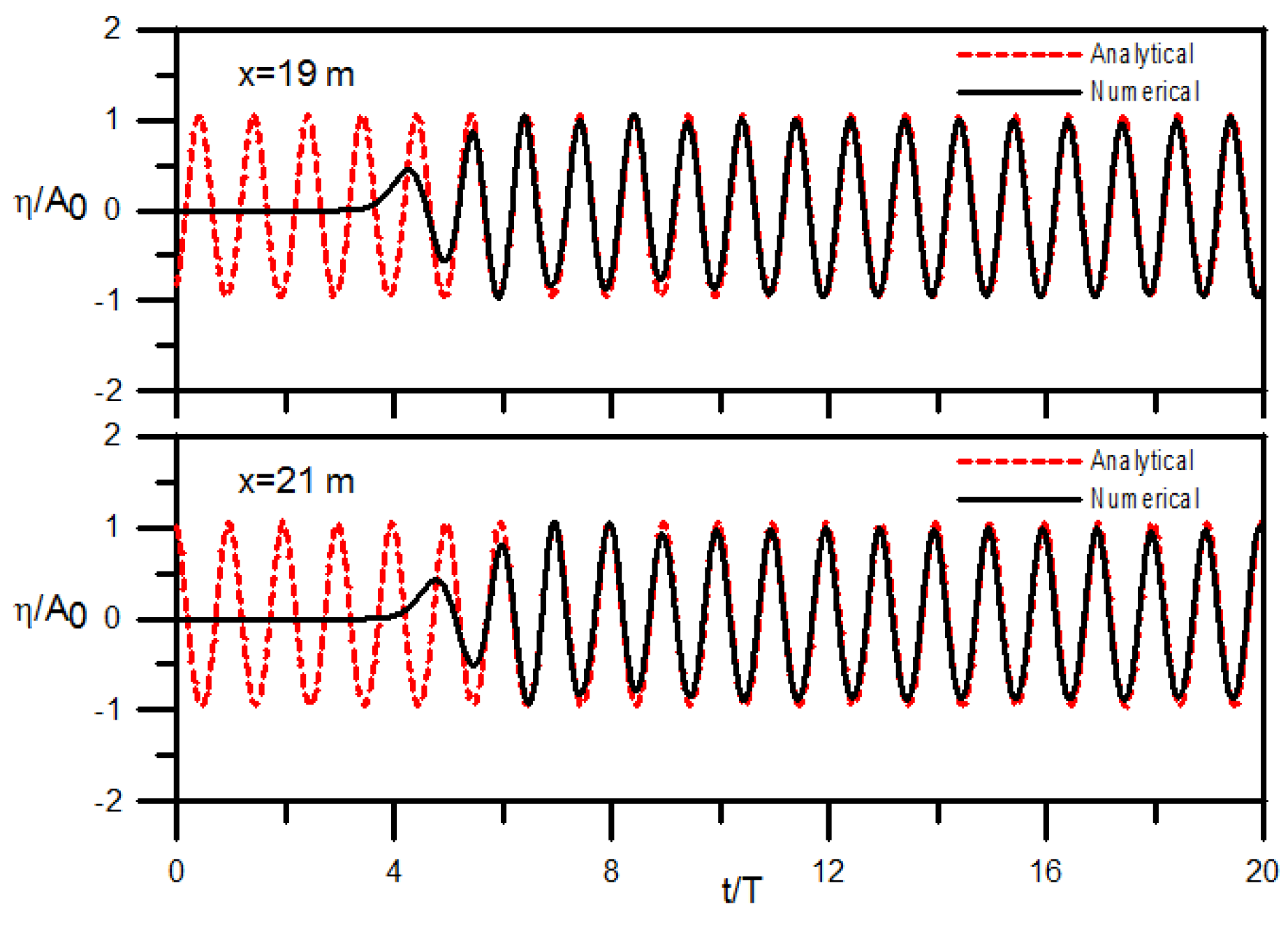
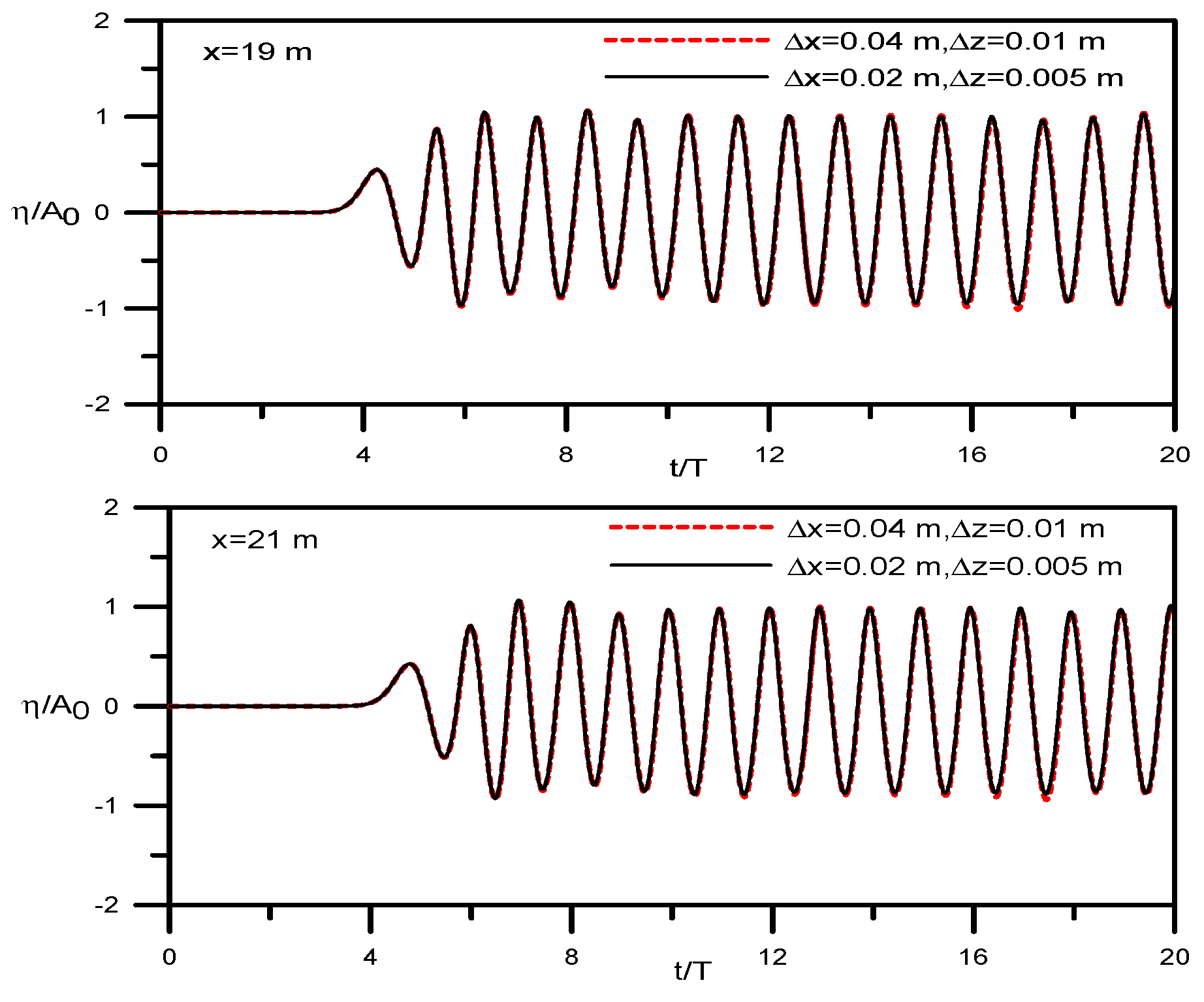
3.1. Monochromatic Wave Generations
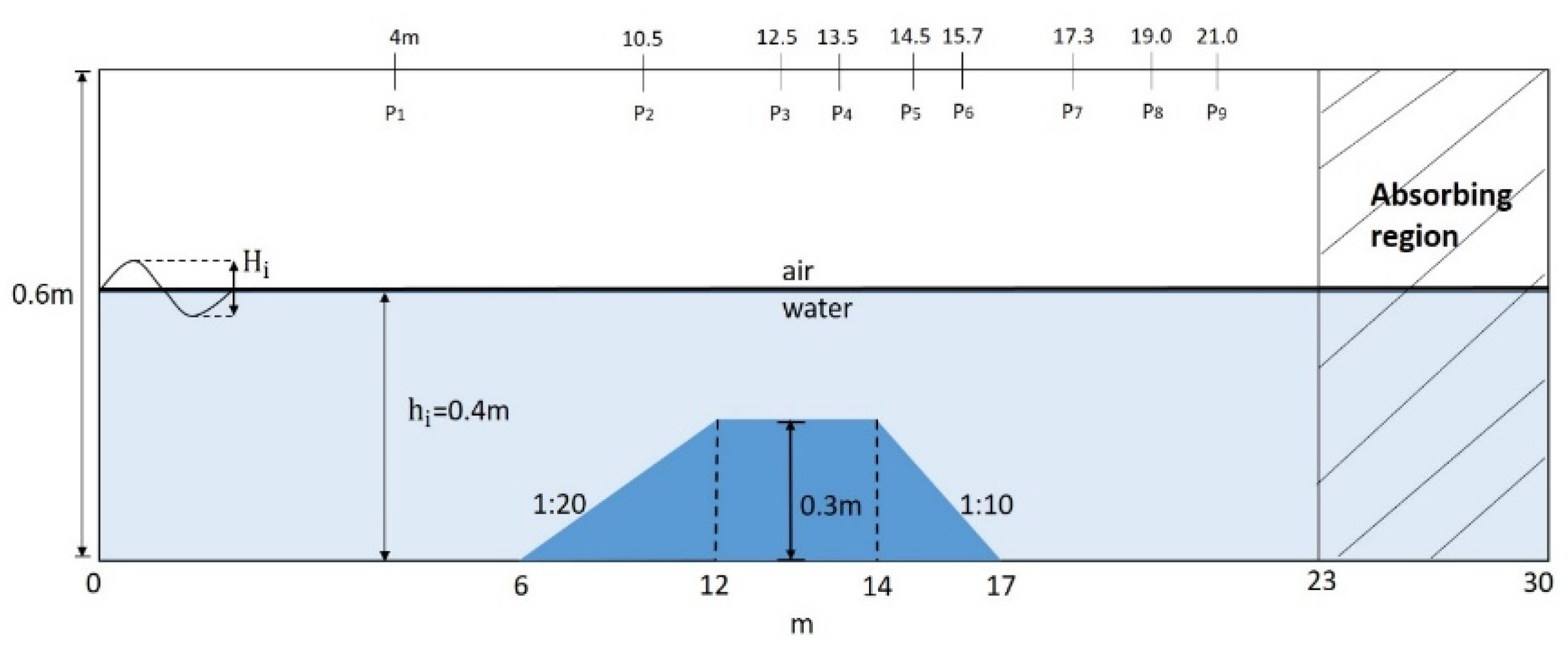
3.2. Wave Transformation Over a Trapezoidal Submerged Breakwater
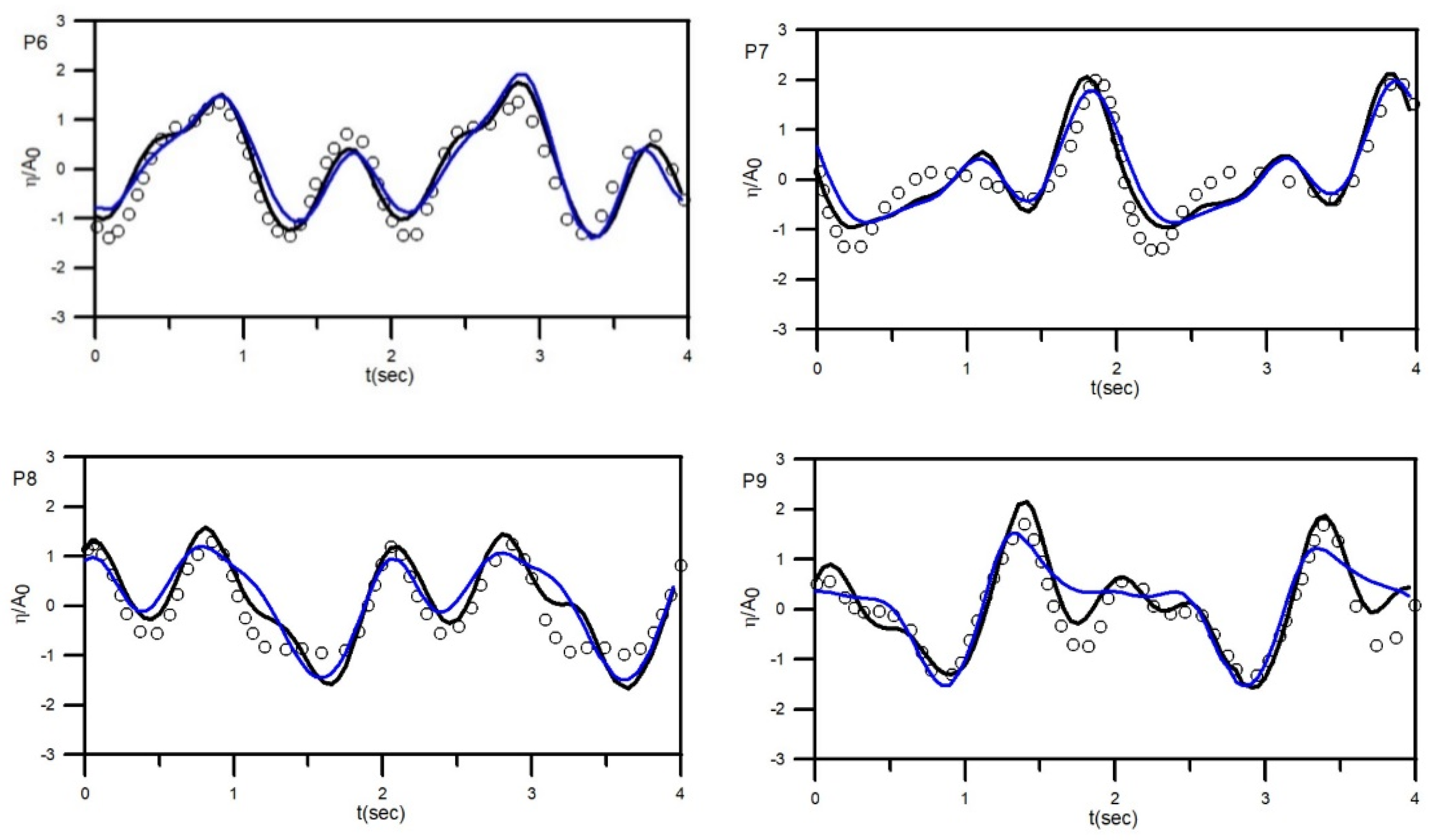
3.2.1. Validation
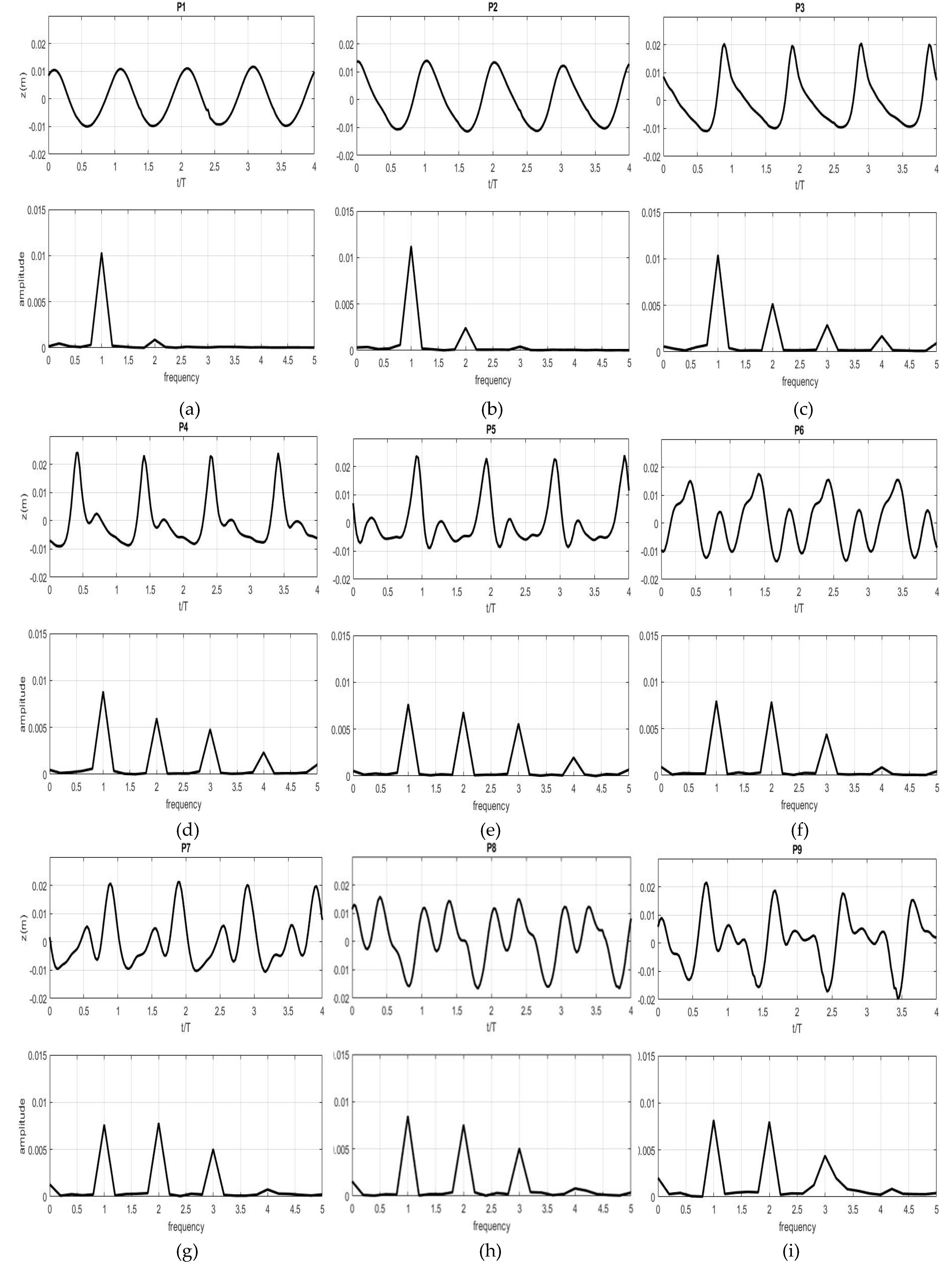
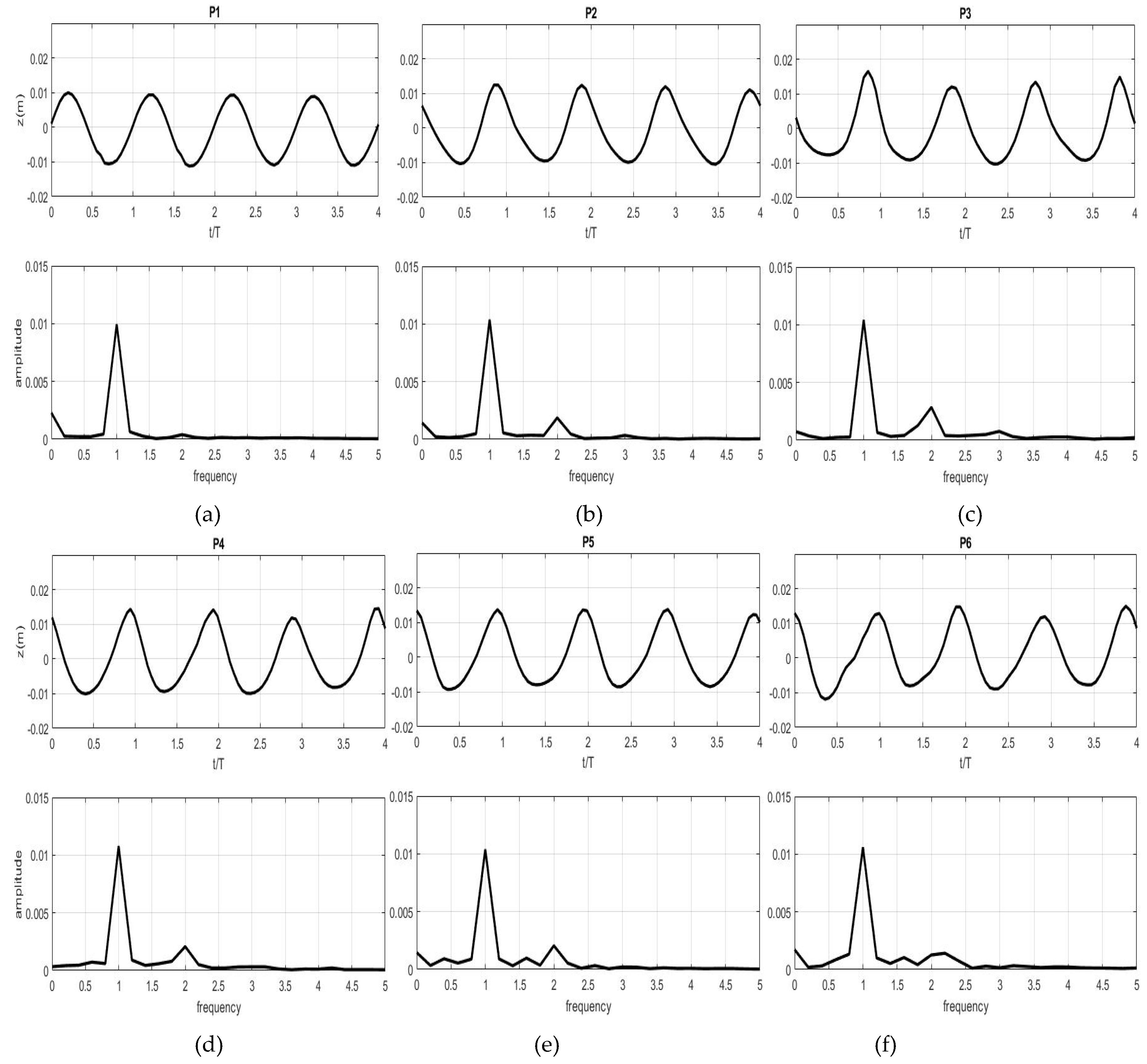
3.2.2. Wave Transformation with Three Wavelengths
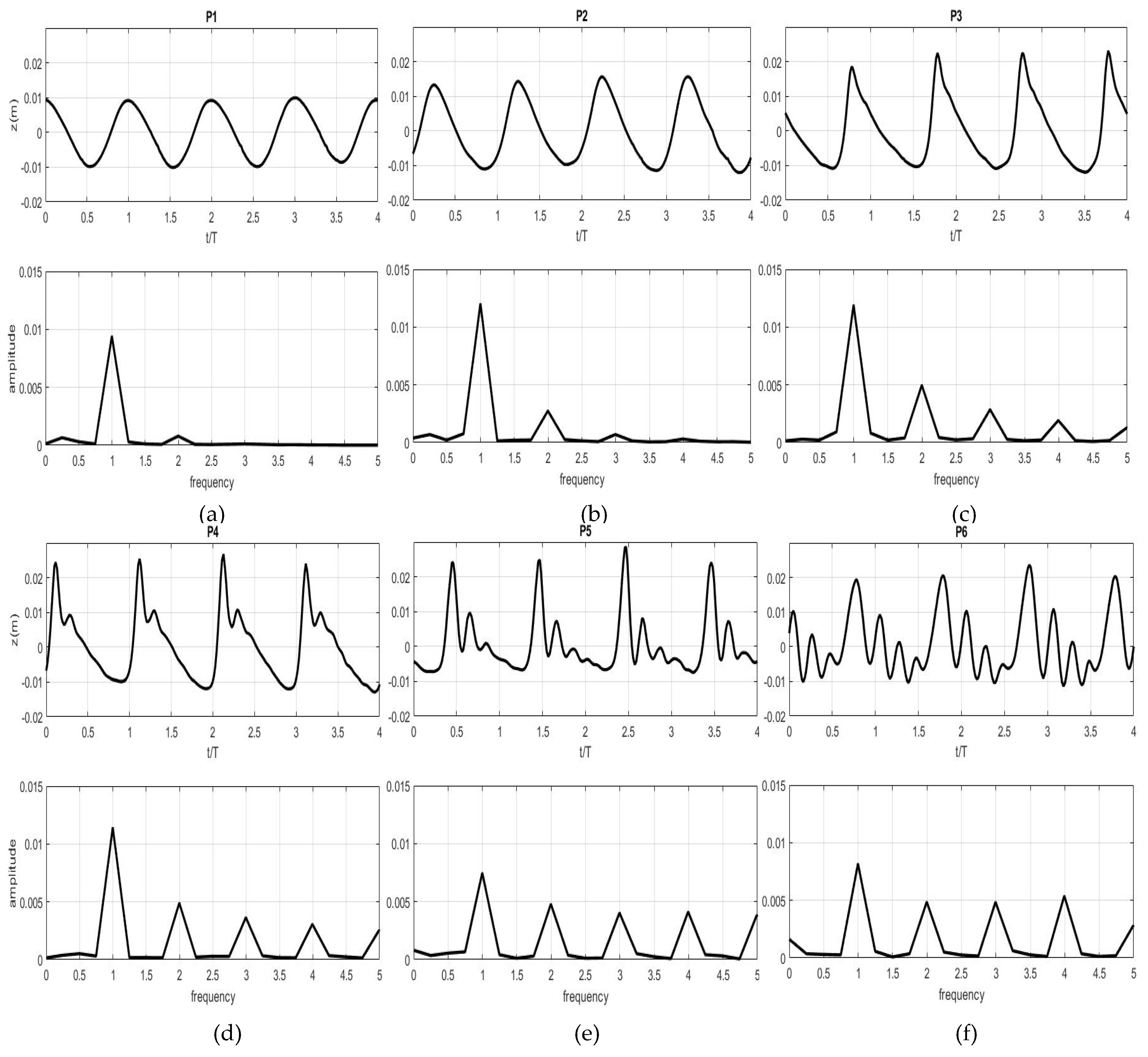
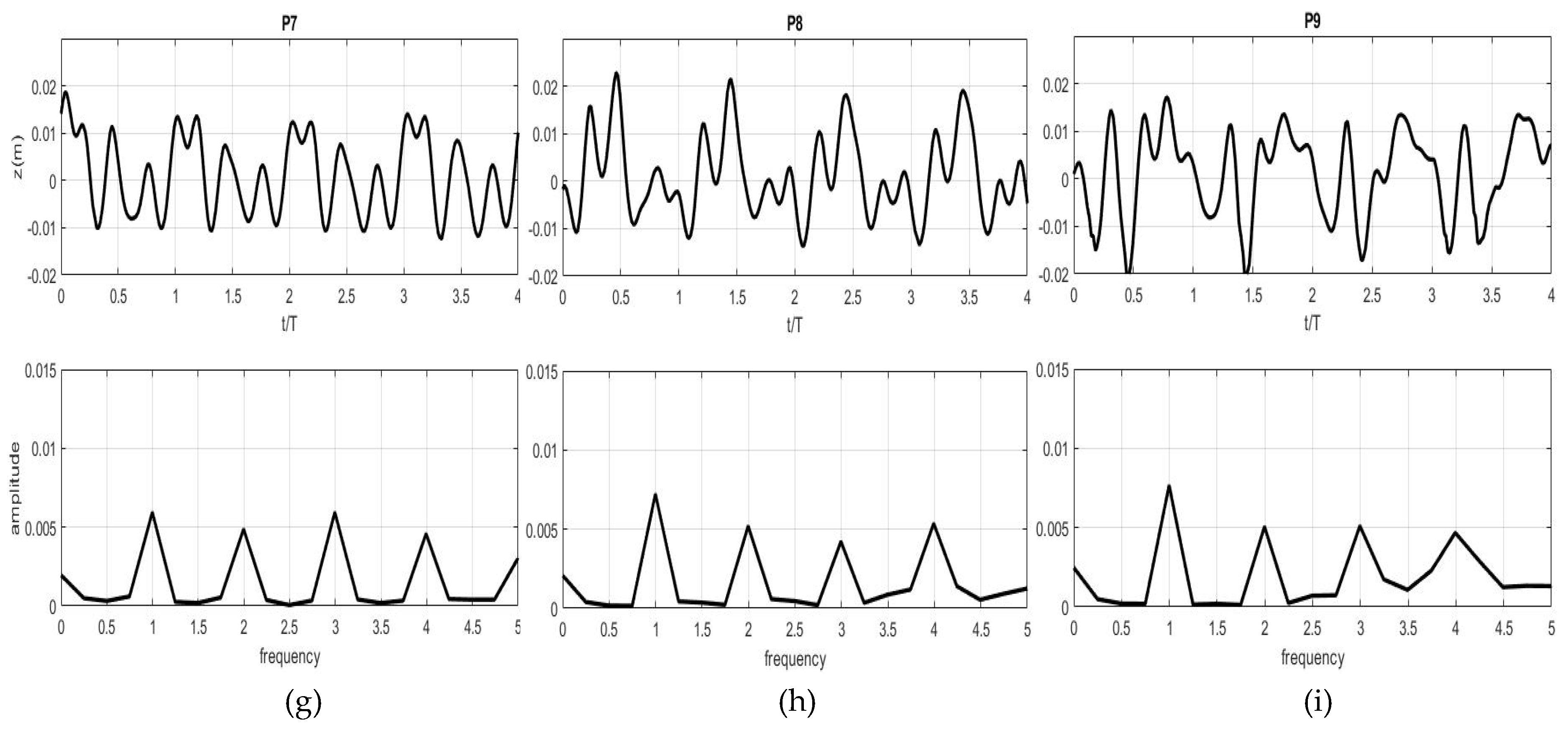
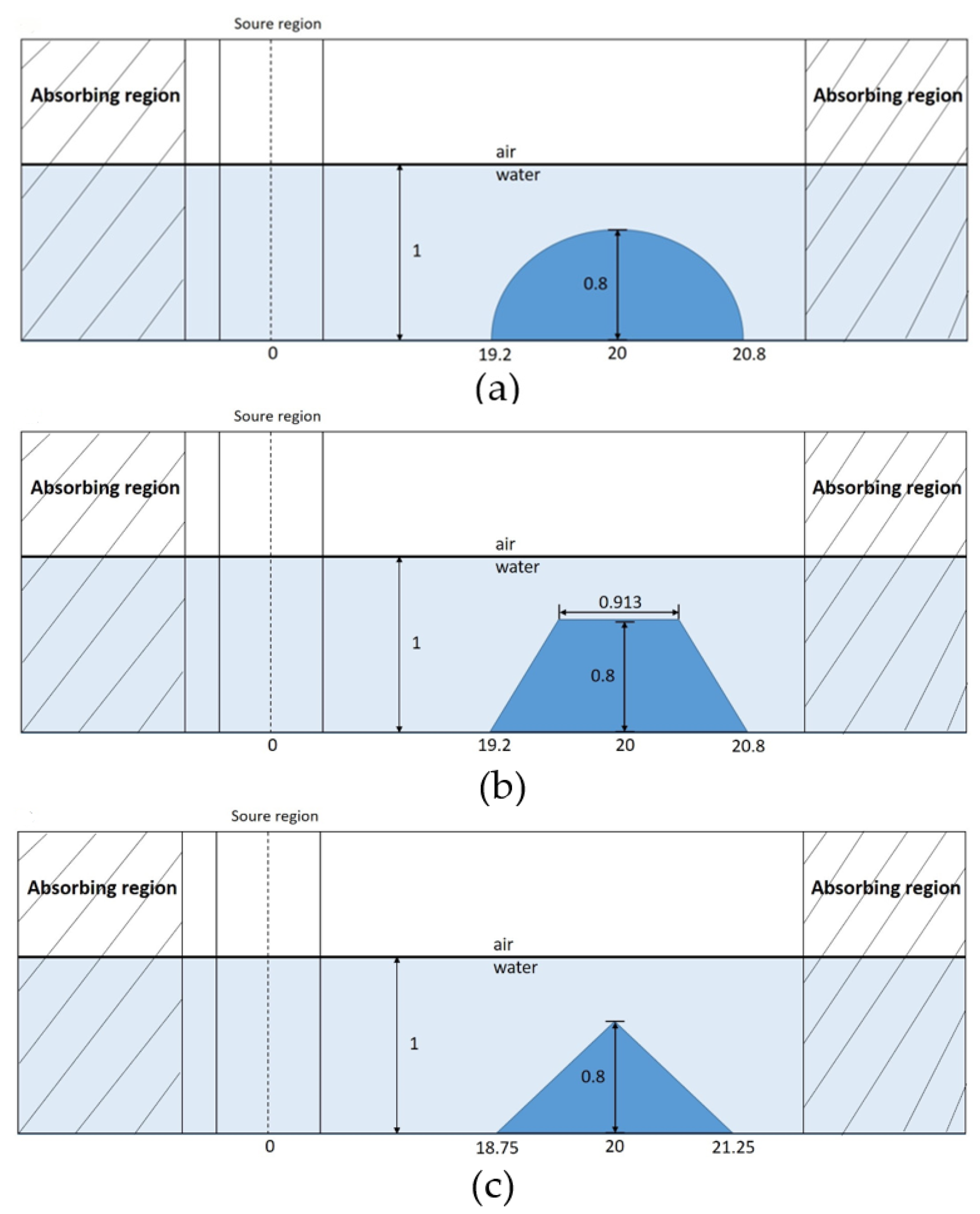
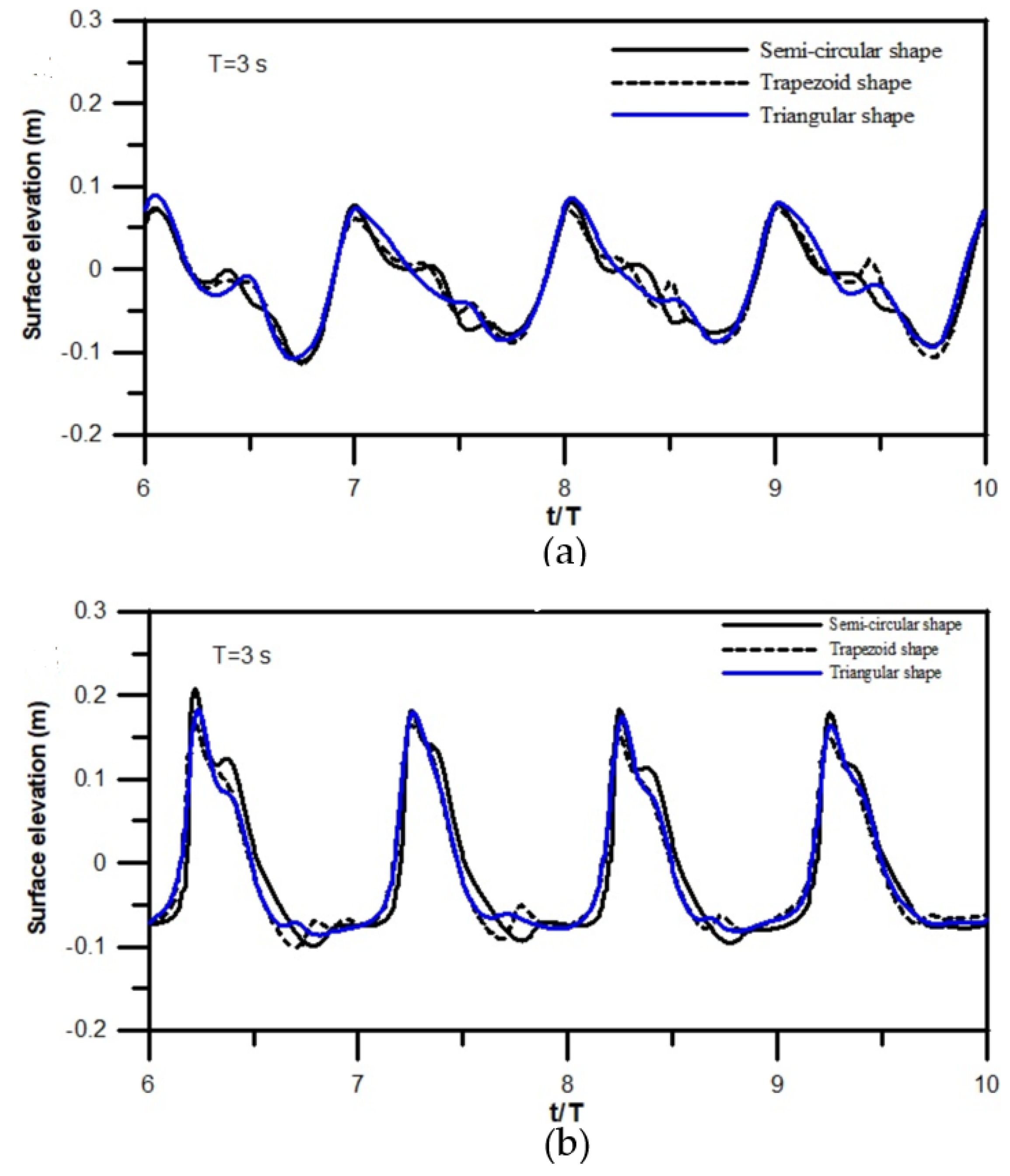
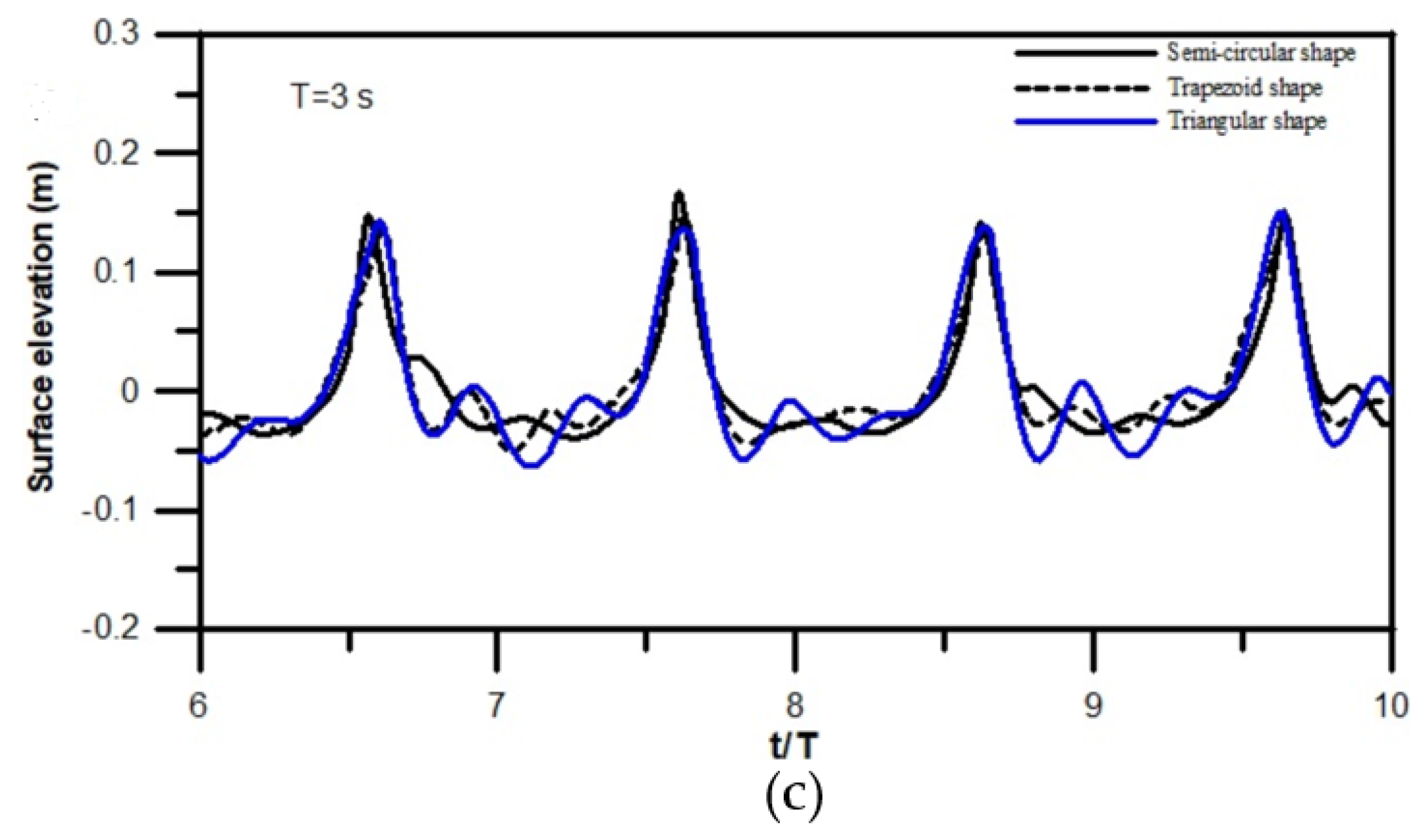
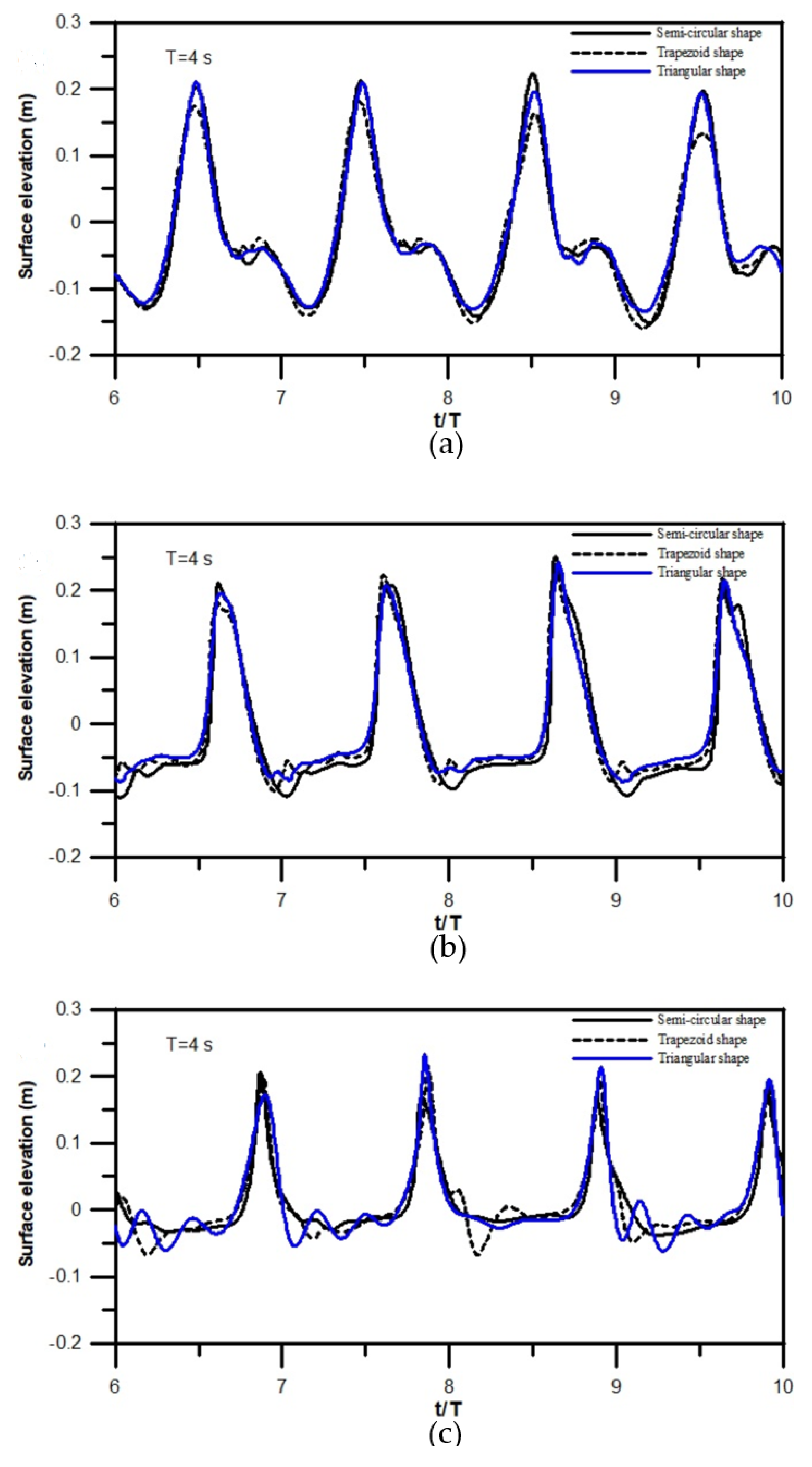
3.3. Progressive Waves Over Three Types of Submerged Breakwaters
3.3.1. Wave Transformations
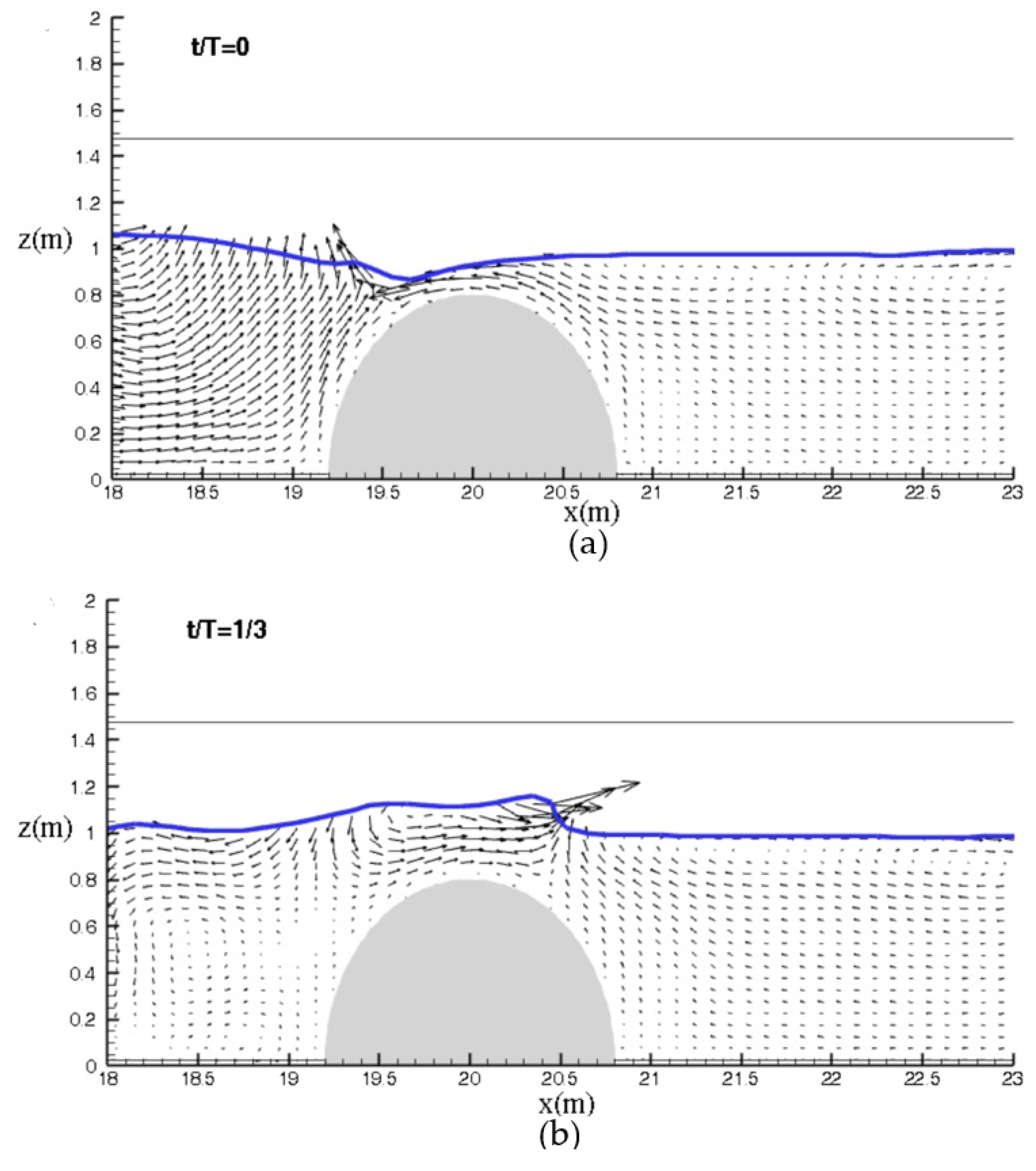
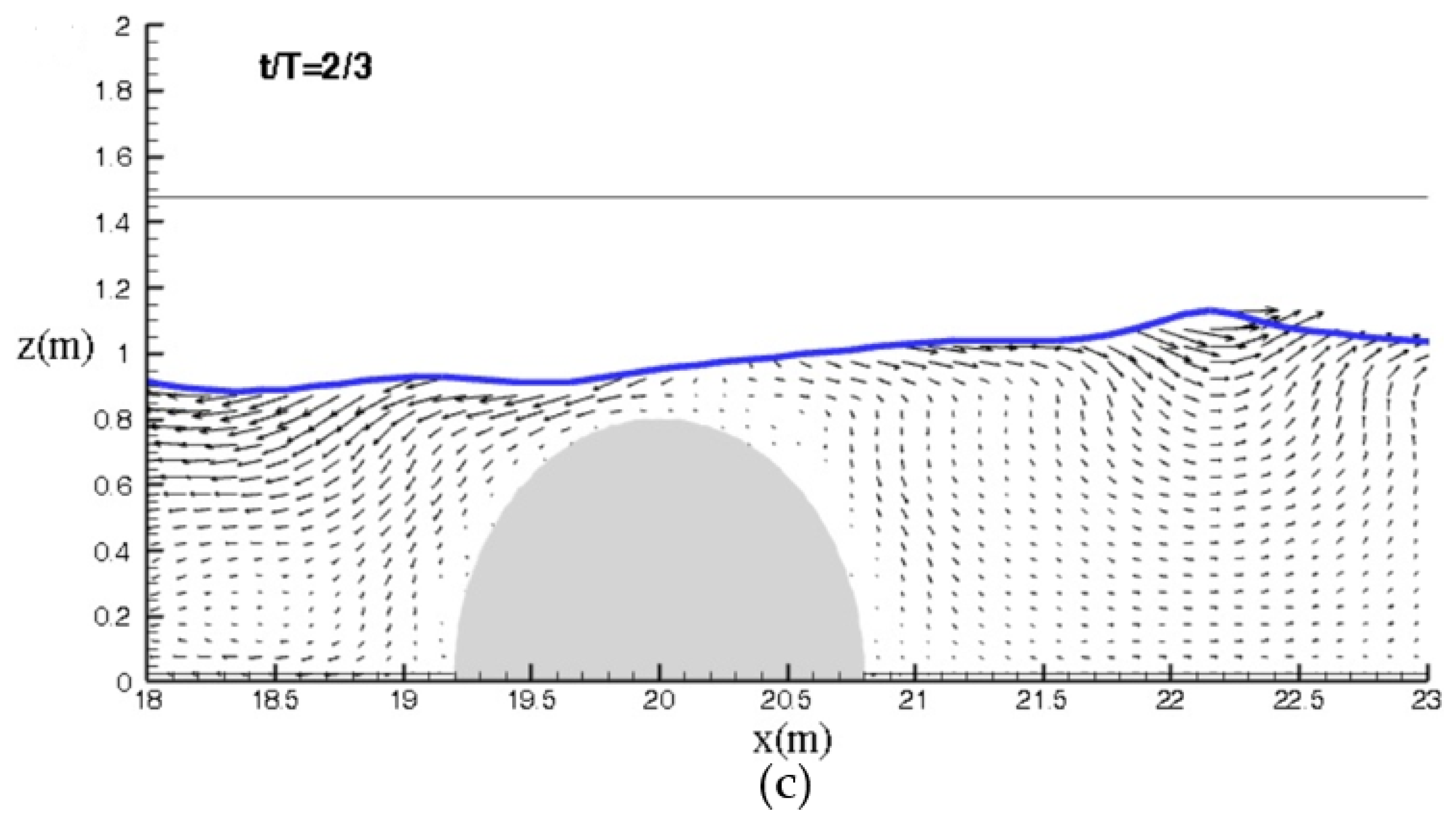
3.3.2. Velocity Patterns Around the Objects
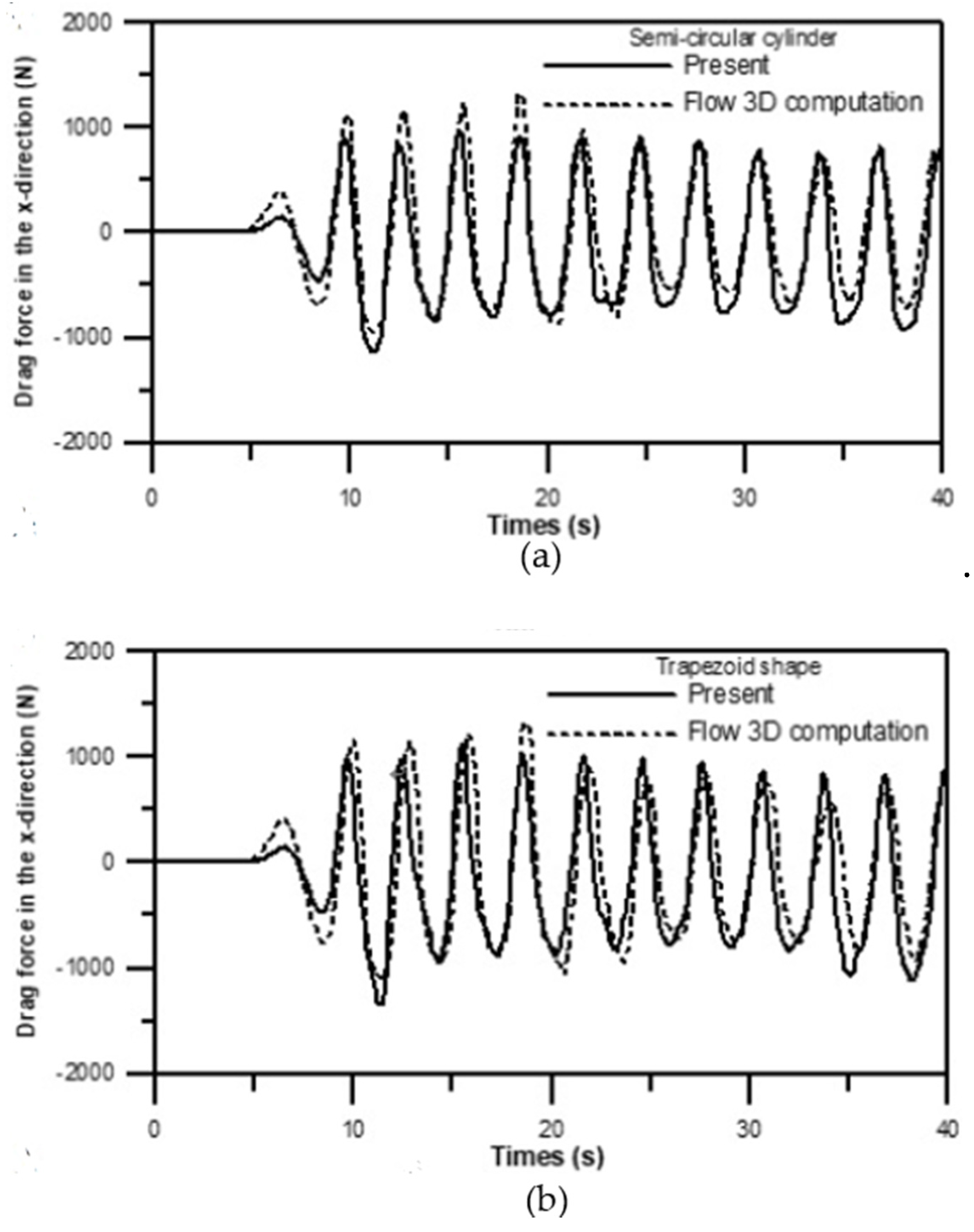
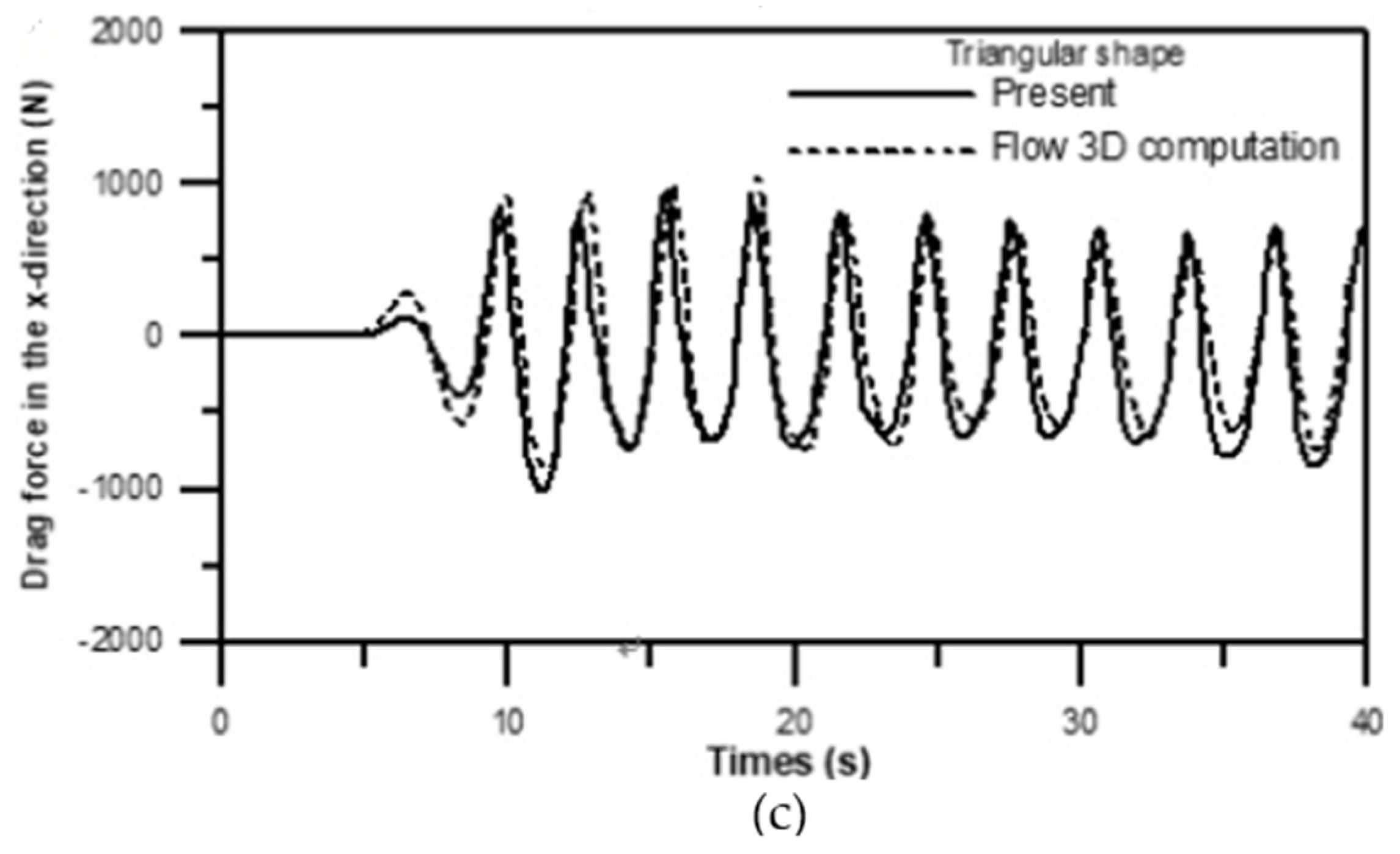
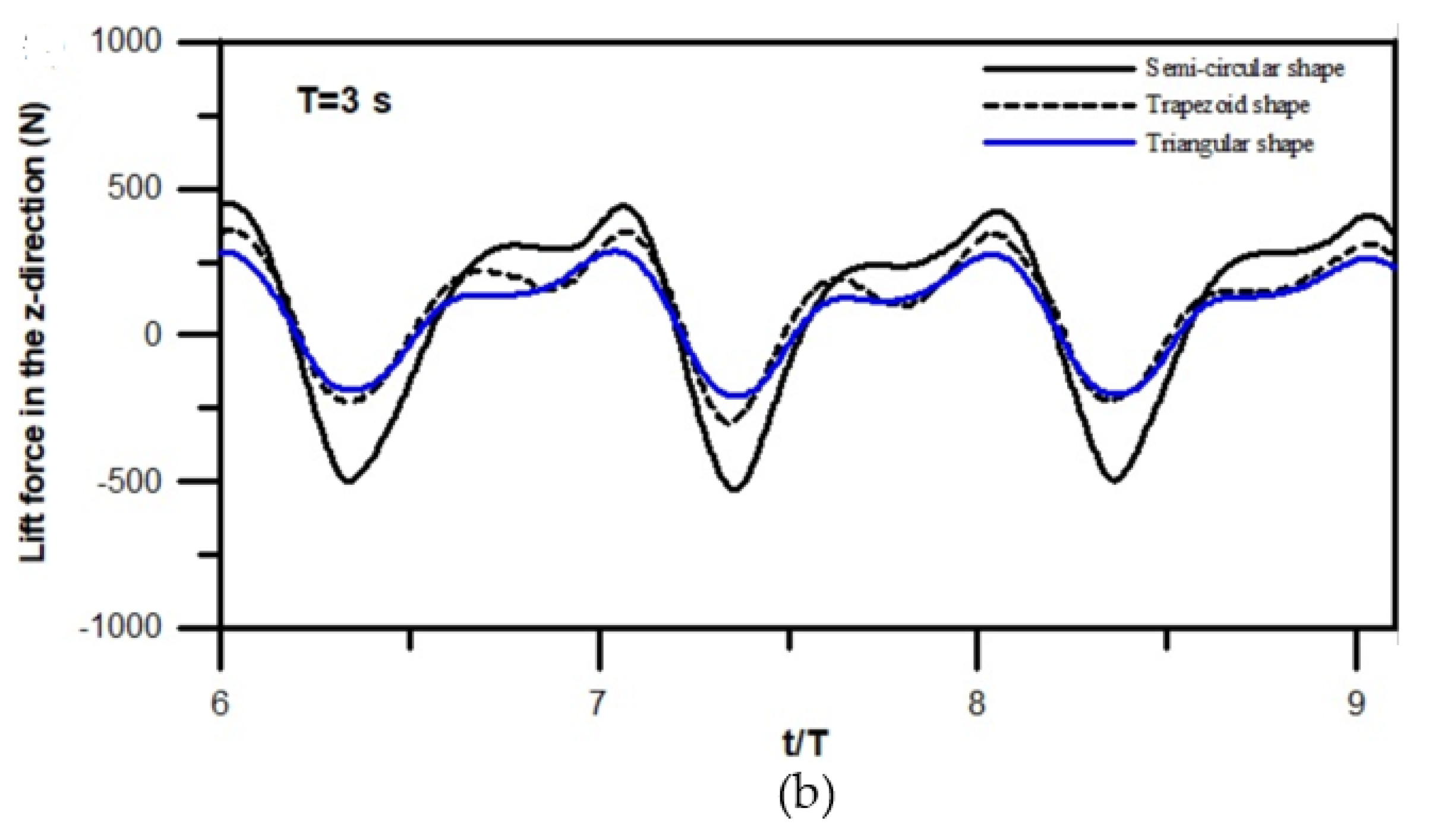
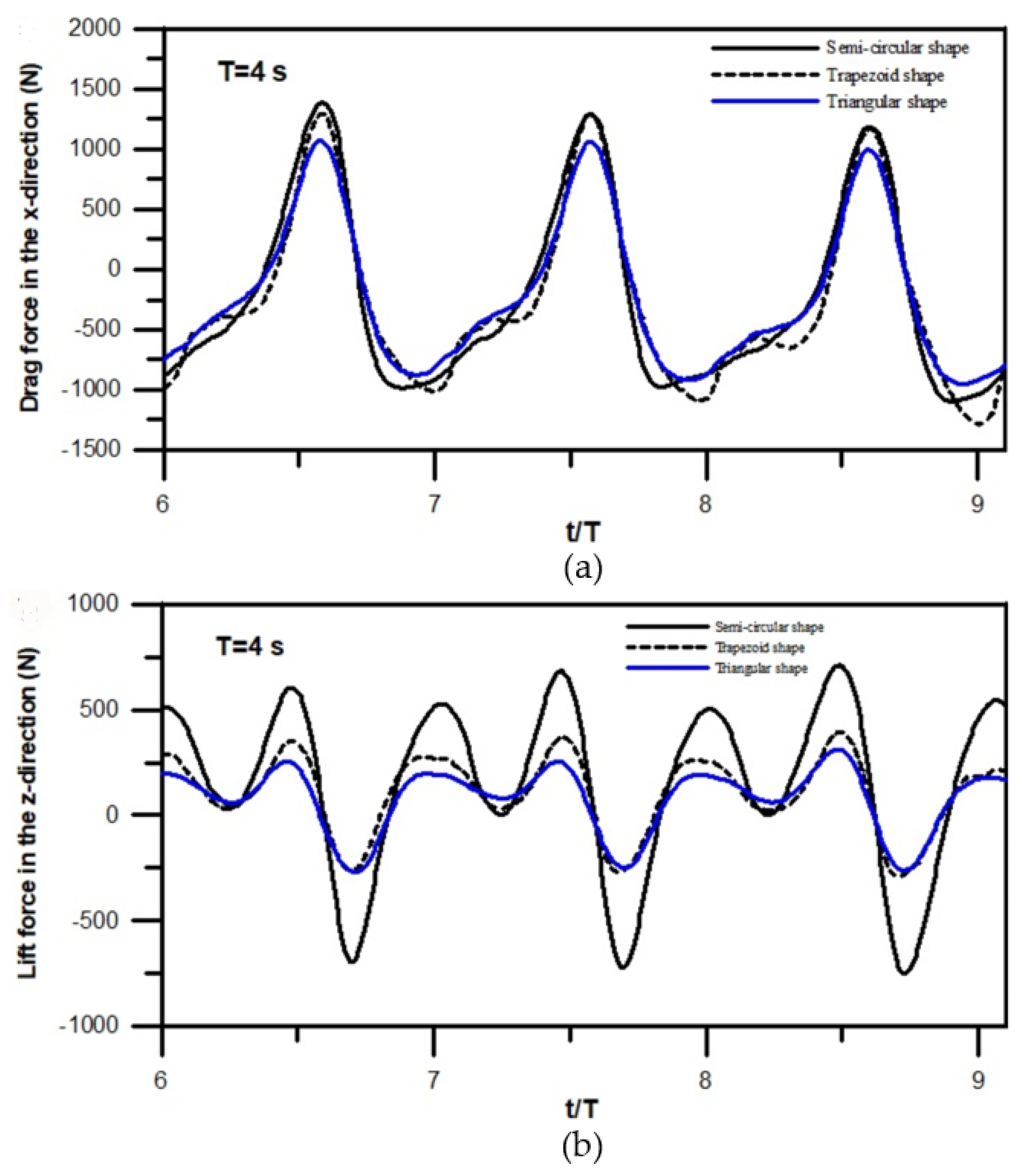
3.3.3. Simulations of Drag and Lift Forces
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hsu, T.W.; Shih, D.S.; Li, C.Y. A study on coastal flooding and risk assessment under climate Change in the Mid-Western Coast of Taiwan. Water 2017, 9, 390. [Google Scholar] [CrossRef]
- Mori, N.; Takemi, T. Impact assessment of coastal hazards due to future changes of tropical cyclones in the North Pacific Ocean. Weather Clim. Extrem. 2016, 11, 53–69. [Google Scholar] [CrossRef]
- Takagi, H.; Kashihara, H.; Esteban, M.; Shibayama, T. Assessment of future stability of breakwaters under climate change. Coast. Eng. J. 2011, 53, 21–39. [Google Scholar] [CrossRef]
- Johnson, J.W.; Fuchs, R.A.; Morison, J.R. The damping action of submerged breakwaters. Trans. Am. Geophys. Union 1951, 32, 704–718. [Google Scholar] [CrossRef]
- Rey, V.; Belrous, M.; Guaselli, E. Propagation of surface gravity waves over rectangular submerged bar. J. Fluid Mech. 1992, 9, 193–217. [Google Scholar] [CrossRef]
- Beji, S.; Battjes, J.A. Experimental investigation of wave propagation over a bar. Coast. Eng. 1993, 19, 156–167. [Google Scholar] [CrossRef]
- Luth, H.R.; Klopman, G.; Kitou, N. Kinematics of Waves Breaking partially on An Offshore Bar. LDV Measurements of Waves with and without A Net Onshore Current; Technical Report H-1573; Delft Hydraulics: Delft, The Netherlands, 1994; p. 40. [Google Scholar]
- Madsen, P.A.; Sorensen, O.R. A new form of the Boussinesq equations with improved linear dispersion characteristics, Part 2. Coast. Eng. 1992, 18, 183–204. [Google Scholar] [CrossRef]
- Ohyama, T.; Nadaoka, K. Transformation of a nonlinear wave train passing over a submerged shelf without breaking. Coastal Eng. 1994, 24, 1–22. [Google Scholar] [CrossRef]
- Lara, J.L.; Losada, I.J.; Guanche, R. Wave interaction with low-mound breakwaters using a RANS model. Ocean Eng. 2008, 35, 1388–1400. [Google Scholar] [CrossRef]
- Losada, I.J.; Lara, J.L.; Guanche, R.; Gonzalez-Ondina, J.M. Numerical analysis of wave overtopping of rubble mound break waters. Coast. Eng. 2008, 31, 47–62. [Google Scholar] [CrossRef]
- Guanche, R.; Losada, I.J.; Lara, J.L. Numerical analysis of wave loads for coastal structure stability. Coast. Eng. 2009, 56, 543–558. [Google Scholar] [CrossRef]
- Huang, C.J.; Dong, C.M. Wave deformation and vortex generation in water waves propagating over a submerged dike. Coast. Eng. 1999, 37, 123–148. [Google Scholar] [CrossRef]
- Huang, C.J.; Dong, C.M. On the interaction of a solitary wave and a submerged dike. Coast. Eng. 2001, 43, 265–268. [Google Scholar] [CrossRef]
- Kawasaki, K. Numerical simulation of breaking and post-breaking wave deformation process around a submerged breakwater. Coast. Eng. 1999, 41, 201–223. [Google Scholar] [CrossRef]
- Peskin, C.S. Flow patterns around heart valves: A numerical method. J. Comput. Phys. 1972, 10, 252–271. [Google Scholar] [CrossRef]
- Goldstein, D.; Haandler, R.; Sirovich, L. Modeling a no-slip flow boundary with an external force field. J. Comput. Phys. 1993, 105, 354–366. [Google Scholar] [CrossRef]
- Saiki, E.M.; Biringen, S. Numerical simulation of a cylinder in uniform flow: Application of a virtual boundary method. J. Comput. Phys. 1996, 123, 450–465. [Google Scholar] [CrossRef]
- Briscolini, M.; Santangelo, P. Development of the mask method for incompressible unsteady flows. J. Comput. Phys. 1989, 84, 57–75. [Google Scholar] [CrossRef]
- Tseng, Y.H.; Ferziger, J.H. A ghost-cell immersed boundary method for flow in complex geometry. J. Comput. Phys. 2003, 192, 593–623. [Google Scholar] [CrossRef]
- Coclite, A.; de Tullio, M.D.; Pascazio, G.; Decuzzi, P. A combined Lattice Boltzmann and Immersed boundary approach for predicting the vascular transport of differently shaped particles. Comput. Fluids 2016, 136, 260–271. [Google Scholar] [CrossRef]
- Coclite, A.; Ranaldo, S.; de Tullio, M.D.; Decuzzi, P.; Pascazio, G. Kinematic and dynamic forcing strategies for predicting the transport of inertial capsules via a combined lattice Boltzmann–Immersed Boundary method. Comput. Fluids 2019, 180, 41–53. [Google Scholar] [CrossRef]
- Wang, W.; Yang, J.; Koo, B.; Stern, F. A coupled level set and volume of fluid method for sharp interface simulation of plunging breaking waves. Int. J. Multiph. Flow 2007, 35, 227–246. [Google Scholar] [CrossRef]
- Yang, J.; Stern, F. Sharp interface immersed–boundary/level–set method for wave–body interactions. J. Comput. Phys. 2009, 228, 6590–6616. [Google Scholar] [CrossRef]
- Anderson, D.M.; McFadden, G.B.; Wheeler, A.A. Diffuse-interface methods in fluid mechanics. Annu. Rev. Fluid Mech. 1998, 30, 139–165. [Google Scholar] [CrossRef]
- Scardovelli, R.; Zaleski, S. Direct numerical simulation of free-surface and interfacial. Annu. Rev. Fluid. Mech. 1999, 31, 567–603. [Google Scholar] [CrossRef]
- Mittal, R.; Iaccarion, G. Immersed boundary methods. Annu. Rev. Fluid Mech. 2005, 37, 239–261. [Google Scholar] [CrossRef]
- Yan, B.; Wei, B.; Queka, S.T. An improved immersed boundary method with new forcing point searching scheme for simulation of bodies in free surface flows. J. Comput. Phys. 2018, 24, 830–859. [Google Scholar] [CrossRef]
- Shen, L.; Chan, E.S. Numerical simulation of fluid-structure interaction using a combined volume of fluid and immersed boundary method. Ocean Eng. 2008, 35, 939–952. [Google Scholar] [CrossRef]
- Shen, L.; Chan, E.S. Numerical simulation of nonlinear dispersive waves propagating over a submerged bar by IB–VOF model. Ocean Eng. 2011, 38, 319–328. [Google Scholar] [CrossRef]
- Zhan, C.; Lin, N.; Tang, Y.; Zhao, C. A sharp interface immersed boundary/VOF model coupled with wave generating and absorbing options for wave-structure interaction. Comput. Fluids 2014, 89, 214–231. [Google Scholar] [CrossRef]
- Pilliod, J.; Puckett, E. Second-order accurate volume of fluid algorithms for tracking material interfaces. J. Comput. Phys. 2004, 199, 465–502. [Google Scholar] [CrossRef]
- Hirt, C.W.; Nicholas, B.D. Volume of fluid method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Sethian, J.A.; Smereka, P. Level set methods for fluid interfaces. Annu. Rev. Fluid Mech. 2003, 35, 341–372. [Google Scholar] [CrossRef]
- Kasem, T.H.M.A.; Sasaki, J. Multiphase modeling of wave propagation over submerged obstacles using weno and level set methods. Coast. Eng. J. 2010, 52, 235–259. [Google Scholar] [CrossRef]
- Bihs, H.; Kamath, A.; Chella, M.A.; Aggarwal, A.; Arntsen, Ø.A. A new level set numerical wave tank with improved density interpolation for complex wave hydrodynamics. Comput. Fluids 2016, 140, 191–208. [Google Scholar] [CrossRef]
- Lo, D.C.; Wang, K.H.; Hsu, T.W. Two-dimensional free-surface flow modeling for wave-structure interactions and induced motions of floating bodies. Water 2020, 12, 543. [Google Scholar] [CrossRef]
- Liu, X.D.; Osher, S.; Chan, T. Weighted essentially non-oscillatory schemes. J. Comput. Phys. 1994, 115, 200–212. [Google Scholar] [CrossRef]
- Young, D.M.; Testik, F.Y. Wave reflection by submerged vertical and semicircular breakwaters. Ocean Eng. 2011, 38, 1269–1276. [Google Scholar] [CrossRef]
- Jiang, X.L.; Zou, Q.P.; Zhang, N. Wave load on submerged quarter-circular and semicircular breakwaters under irregular waves. Coast. Eng. 2017, 121, 265–277. [Google Scholar] [CrossRef]
- Lin, P.; Liu, P.L.F. Discussion of vertical variation of the flow across the surf zone. Coast. Eng. 2004, 50, 161–164. [Google Scholar] [CrossRef]
- Chorin, A.J. A numerical method for solving incompressible viscous flow problem. J. Comput. Phys. 1967, 2, 12–26. [Google Scholar] [CrossRef]
- Kinsman, B. Wind Waves: Their Generation and Propagation on the Ocean Surface; Prentice-Hall: Englewood Cliffs, NJ, USA, 1965. [Google Scholar]
- Windt, C.; Davidson, J.; Schmitt, P.; Ringwood, J.V. On the assessment of numerical wave makers in CFD simulations. J. Mar. Sci. Eng. 2019, 7, 47. [Google Scholar] [CrossRef]
- Lake, B.M.; Yuen, H.C.; Rungaldier, H.; Ferguson, W.E. Nonlinear deep-water waves: Theory and experiment. Part 2. Evolution of a continuous wave train continuous wave train. J. Fluid Mech. 1977, 83, 49–74. [Google Scholar] [CrossRef]
- Dingemans, M.W. Comparison of Computations with Boussinesq-like Models and Laboratory Measurements; Report H-1684.12; Delft Hydraulics: Delft, The Netherlands, 1994; p. 32. [Google Scholar]
- Babanini, B.A.; Chalikov, D.; Young, I.R.; Savelye, I. Numerical and laboratory investigation of breaking of steep two-dimensional waves in deep water. J. Fluid Mech. 2010, 644, 433–463. [Google Scholar] [CrossRef]
























Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsai, Y.-S.; Lo, D.-C. A Ghost-Cell Immersed Boundary Method for Wave–Structure Interaction Using a Two-Phase Flow Model. Water 2020, 12, 3346. https://doi.org/10.3390/w12123346
Tsai Y-S, Lo D-C. A Ghost-Cell Immersed Boundary Method for Wave–Structure Interaction Using a Two-Phase Flow Model. Water. 2020; 12(12):3346. https://doi.org/10.3390/w12123346
Chicago/Turabian StyleTsai, Yuan-Shiang, and Der-Chang Lo. 2020. "A Ghost-Cell Immersed Boundary Method for Wave–Structure Interaction Using a Two-Phase Flow Model" Water 12, no. 12: 3346. https://doi.org/10.3390/w12123346
APA StyleTsai, Y.-S., & Lo, D.-C. (2020). A Ghost-Cell Immersed Boundary Method for Wave–Structure Interaction Using a Two-Phase Flow Model. Water, 12(12), 3346. https://doi.org/10.3390/w12123346