Optimization of Pressurized Tree-Type Water Distribution Network Using the Improved Decomposition–Dynamic Programming Aggregation Algorithm

 ,
, 

Abstract
1. Introduction
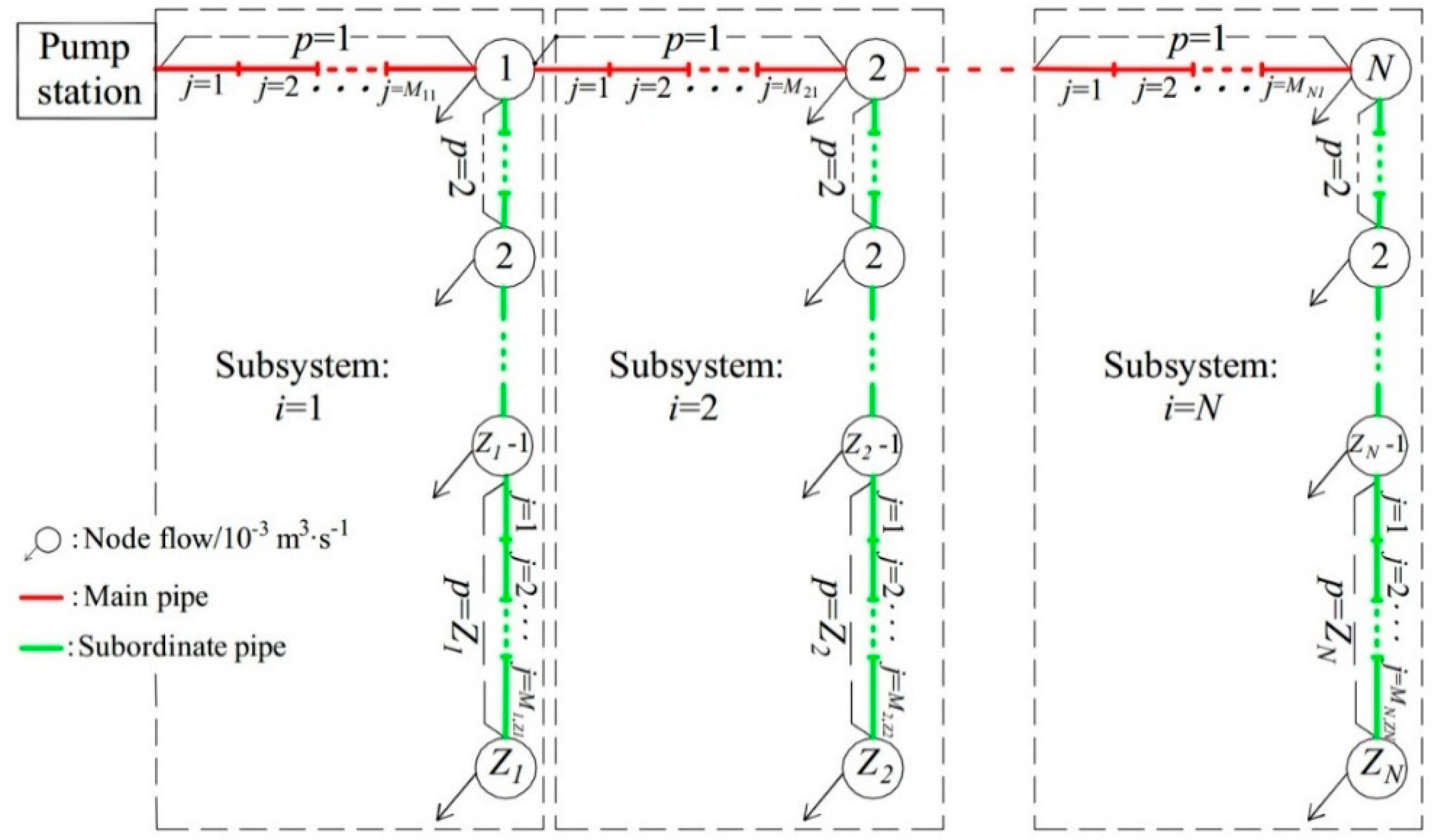
2. Mathematical Model
2.1. Objective Function
2.2. Constraint Conditions
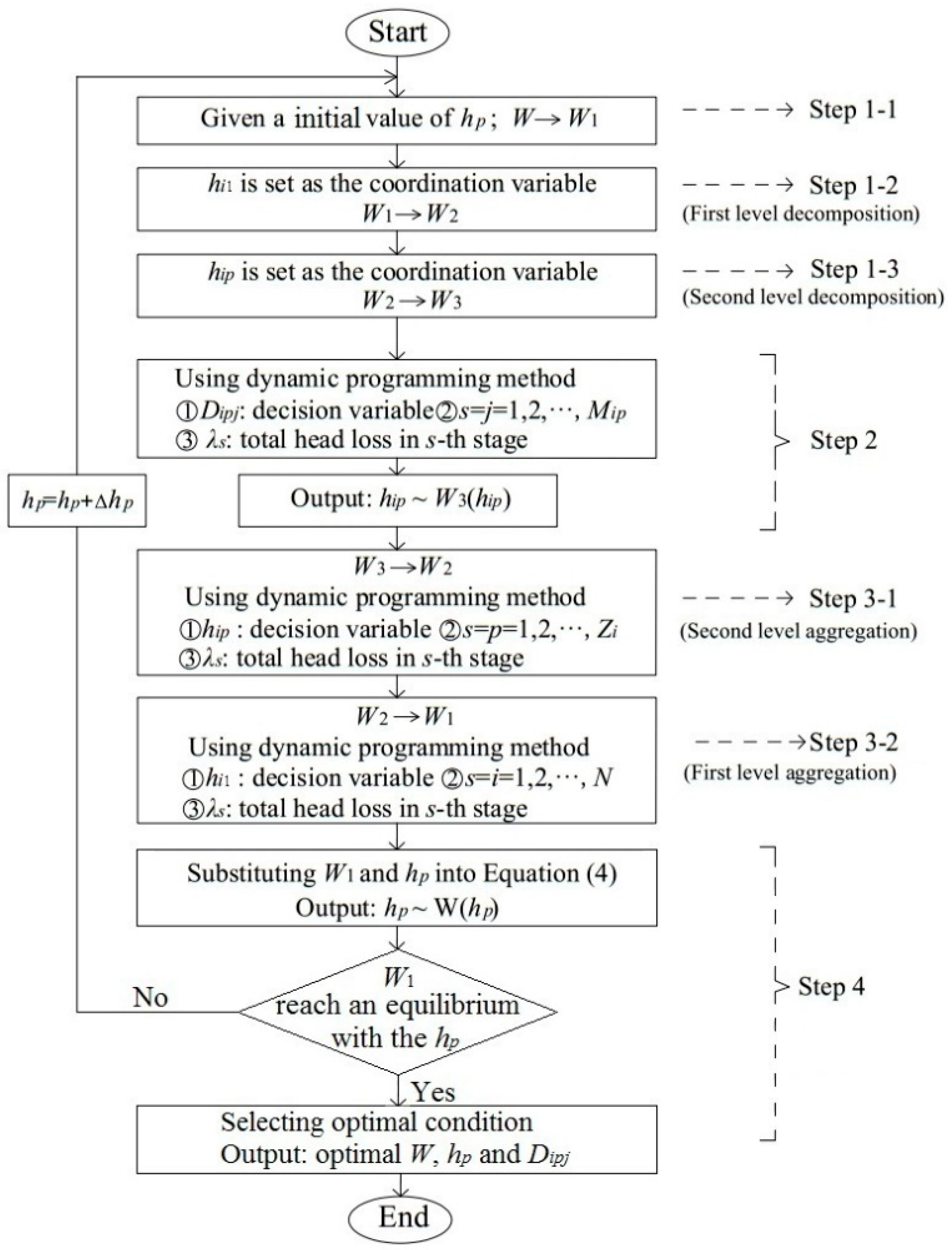
3. Model Solution
4. Application and Optimization Results
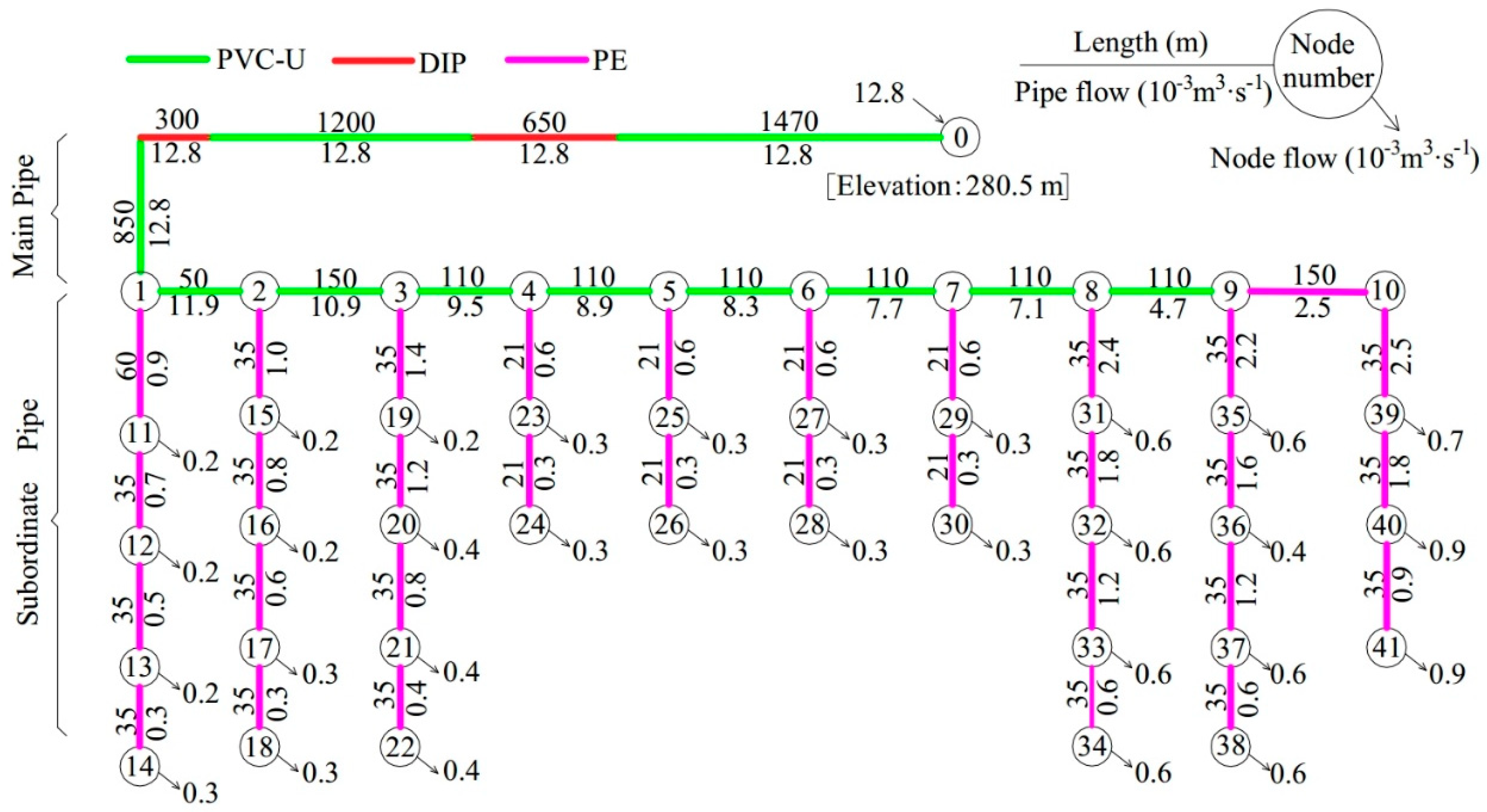
4.1. General Situation for a Pressurized Tree-Type WDN
4.2. Solution Procedures
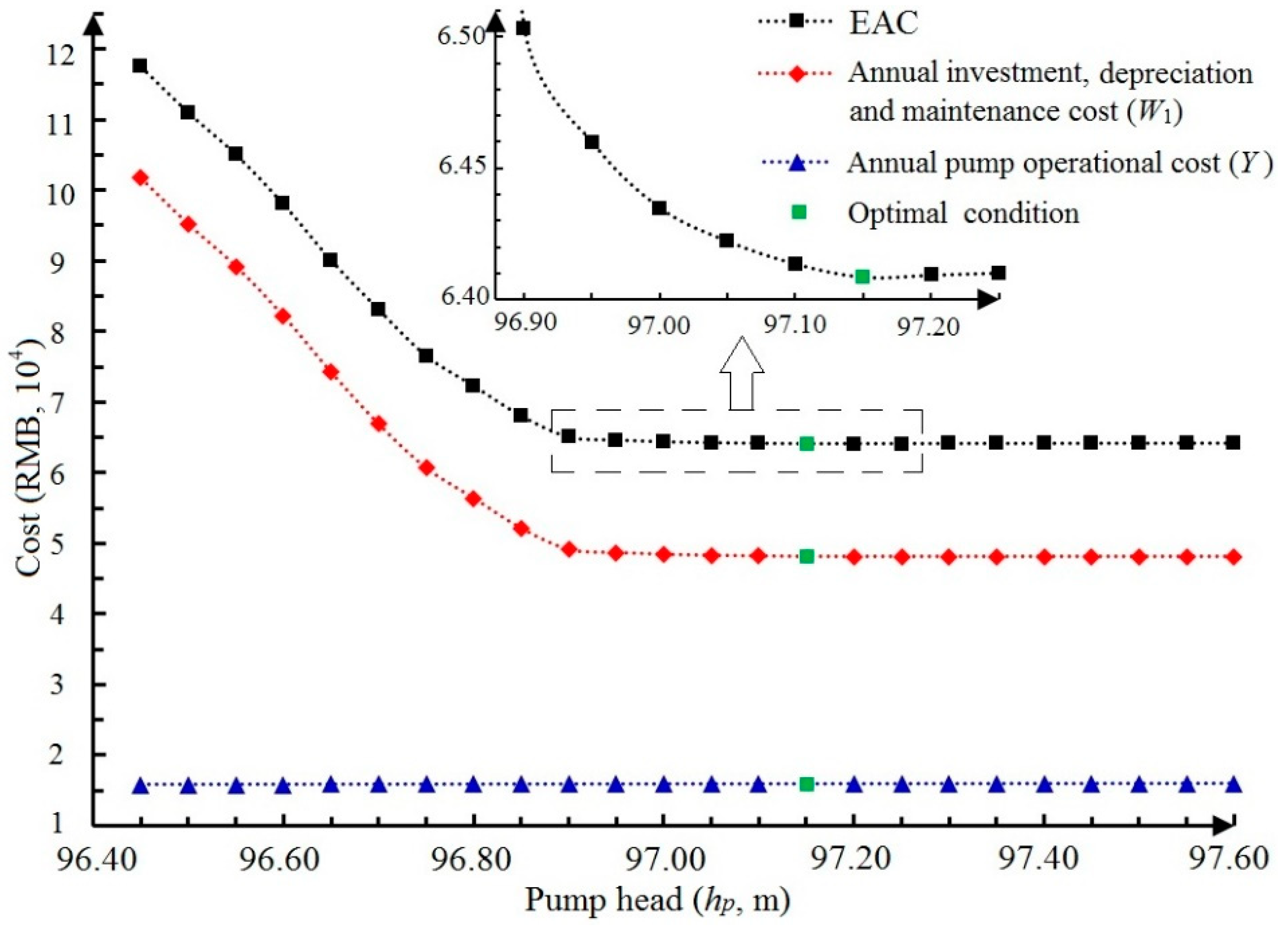
4.3. Optimization Results Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bello, O.; Abu-Mahfouz, A.M.; Hamam, Y.; Page, P.R.; Adedeji, K.B.; Piller, O. Solving Management Problems in Water Distribution Networks: A Survey of Approaches and Mathematical Models. Water 2019, 11, 562. [Google Scholar] [CrossRef]
- Mala-Jetmarova, H.; Sultanova, N.; Savic, D. Lost in Optimisation of Water Distribution Systems? A Literature Review of System Design. Water 2018, 10, 307. [Google Scholar] [CrossRef]
- Makaremi, Y.; Haghighi, A.; Ghafouri, H.R. Optimization of Pump Scheduling Program in Water Supply Systems Using a Self-Adaptive NSGA-II; a Review of Theory to Real Application. Water Resour. Manag. 2017, 31, 1283–1304. [Google Scholar] [CrossRef]
- Coelho, B.; Andrade-Campos, A. Efficiency achievement in water supply systems-A review. Renew. Sustain. Energy Rev. 2014, 30, 59–84. [Google Scholar] [CrossRef]
- Zhao, W.Q.; Beach, T.H.; Rezgui, Y. Optimization of Potable Water Distribution and Wastewater Collection Networks: A Systematic Review and Future Research Directions. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 659–681. [Google Scholar] [CrossRef]
- Vilanova, M.R.N.; Balestieri, J.A.P. Energy and hydraulic efficiency in conventional water supply systems. Renew. Sustain. Energy Rev. 2014, 30, 701–714. [Google Scholar] [CrossRef]
- Cisty, M. Hybrid Genetic Algorithm and Linear Programming Method for Least-Cost Design of Water Distribution Systems. Water Resour. Manag. 2010, 24, 1–24. [Google Scholar] [CrossRef]
- Shiono, N.; Suzuki, H.; Saruwatari, Y. A dynamic programming approach for the pipe network layout problem. Eur. J. Oper. Res. 2019, 277, 52–61. [Google Scholar] [CrossRef]
- Meirelles, G.; Brentan, B.; Izquierdo, J.; Ramos, H.; Luvizotto, E. Trunk Network Rehabilitation for Resilience Improvement and Energy Recovery in Water Distribution Networks. Water 2018, 10, 693. [Google Scholar] [CrossRef]
- Cherchi, C.; Badruzzaman, M.; Oppenheimer, J.; Bros, C.M.; Jacangelo, J.G. Energy and water quality management systems for water utility’s operations: A review. J. Environ. Manag. 2015, 153, 108–120. [Google Scholar] [CrossRef]
- Martinez-Bahena, B.; Cruz-Chavez, M.A.; Avila-Melgar, E.Y.; Cruz-Rosales, M.H.; Rivera-Lopez, R. Using a Genetic Algorithm with a Mathematical Programming Solver to Optimize a Real Water Distribution System. Water 2018, 10, 1318. [Google Scholar] [CrossRef]
- D’Ambrosio, C.; Lodi, A.; Wiese, S.; Bragalli, C. Mathematical programming techniques in water network optimization. Eur. J. Oper. Res. 2015, 243, 774–788. [Google Scholar] [CrossRef]
- De Corte, A.; Sörensen, K. Optimisation of gravity-fed water distribution network design: A critical review. Eur. J. Oper. Res. 2013, 228, 1–10. [Google Scholar] [CrossRef]
- De Corte, A.; Sörensen, K. An Iterated Local Search Algorithm for Multi-Period Water Distribution Network Design Optimization. Water 2016, 8, 359. [Google Scholar] [CrossRef]
- Azoumah, Y.; Bieupoude, P.; Neveu, P. Optimal design of tree-shaped water distribution network using constructal approach: T-shaped and Y-shaped architectures optimization and comparison. Int. Commun. Heat Mass Transf. 2012, 39, 182–189. [Google Scholar] [CrossRef]
- Dobersek, D.; Goricanec, D. Optimisation of tree path pipe network with nonlinear optimisation method. Appl. Therm. Eng. 2009, 29, 1584–1591. [Google Scholar] [CrossRef]
- Perelman, L.S.; Amin, S. Control of tree water networks: A geometric programming approach. Water Resour. Res. 2015, 51, 8409–8430. [Google Scholar] [CrossRef]
- Sangiorgio, M.; Guariso, G. NN-Based Implicit Stochastic Optimization of Multi-Reservoir Systems Management. Water 2018, 10, 303. [Google Scholar] [CrossRef]
- Castelletti, A.; Galelli, S.; Restelli, M.; Soncini-Sessa, R. Tree-based reinforcement learning for optimal water reservoir operation. Water Resour. Res. 2010, 46, 1–19. [Google Scholar] [CrossRef]
- Abdullah, M.A.; Ab Rashid, M.F.F.; Ghazalli, Z. Optimization of Assembly Sequence Planning Using Soft Computing Approaches: A Review. Arch. Comput. Methods Eng. 2019, 26, 461–474. [Google Scholar] [CrossRef]
- Batchabani, E.; Fuamba, M. Optimal Tank Design in Water Distribution Networks: Review of Literature and Perspectives. J. Water Resour. Plan. Manag. 2014, 140, 136–145. [Google Scholar] [CrossRef]
- Lamaddalena, N.; Khadra, R.; Tlili, Y. Reliability-Based Pipe Size Computation of On-Demand Irrigation Systems. Water Resour. Manag. 2012, 26, 307–328. [Google Scholar] [CrossRef]
- Leon-Celi, C.; Iglesias-Rey, P.L.; Martinez-Solano, F.J.; Mora-Melia, D. A Methodology for the Optimization of Flow Rate Injection to Looped Water Distribution Networks through Multiple Pumping Stations. Water 2016, 8, 575. [Google Scholar] [CrossRef]
- Goncalves, G.M.; Gouveia, L.; Pato, M.V. An improved decomposition-based heuristic to design a water distribution network for an irrigation system. Ann. Oper. Res. 2014, 219, 141–167. [Google Scholar] [CrossRef]
- Basupi, I.; Kapelan, Z. Flexible Water Distribution System Design under Future Demand Uncertainty. J. Water Resour. Plan. Manag. 2015, 141, 1–14. [Google Scholar] [CrossRef]
- Farmani, R.; Abadia, R.; Savic, D. Optimum design and management of pressurized branched irrigation networks. J. Irrig. Drain. Eng. 2007, 133, 528–537. [Google Scholar] [CrossRef]
- Geem, Z.W. Multiobjective Optimization of Water Distribution Networks Using Fuzzy Theory and Harmony Search. Water 2015, 7, 3613–3625. [Google Scholar] [CrossRef]
- Zeng, J.; Han, J.; Zhang, G.Q. Diameter optimization of district heating and cooling piping network based on hourly load. Appl. Therm. Eng. 2016, 107, 750–757. [Google Scholar] [CrossRef]
- Price, E.; Ostfeld, A. Iterative Linearization Scheme for Convex Nonlinear Equations: Application to Optimal Operation of Water Distribution Systems. J. Water Resour. Plan. Manag. 2013, 139, 299–312. [Google Scholar] [CrossRef]
- Gong, Y.; Cheng, J.L. Optimization of Cascade Pumping Stations’ Operations Based on Head Decomposition-Dynamic Programming Aggregation Method Considering Water Level Requirements. J. Water Resour. Plan. Manag. 2018, 144, 04018034. [Google Scholar] [CrossRef]
- Gong, Y.; Cheng, J.L. Combinatorial Optimization Method for Operation of Pumping Station with Adjustable Blade and Variable Speed Based on Experimental Optimization of Subsystem. Adv. Mech. Eng. 2014, 2014, 283520. [Google Scholar] [CrossRef]
- Sadr, J.; Malhamé, R.P. Unreliable transfer lines: Decomposition/aggregation and optimization. Ann. Oper. Res. 2004, 125, 167–190. [Google Scholar] [CrossRef]
- Sadr, J.; Malhamé, R.P. Decomposition/aggregation-based dynamic programming optimization of partially homogeneous unreliable transfer lines. IEEE Trans. Autom. Control 2004, 49, 68–81. [Google Scholar] [CrossRef]
- Howard, R.A. Dynamic Programming. Manag. Sci. 1966, 12, 317–348. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Diameter (m) | Pipe Cost (RMB/m) | ||
|---|---|---|---|
| PVC-U | DIP | PE | |
| 0.025 | - | - | 2.2 |
| 0.032 | - | - | 4.5 |
| 0.040 | - | - | 7.1 |
| 0.050 | 9.3 | - | 10.9 |
| 0.063 | 14.5 | 16.2 | 17.1 |
| 0.075 | 18.3 | 21.0 | 21.5 |
| 0.090 | 25.6 | 29.2 | 30.1 |
| 0.110 | 40.0 | 42.8 | 45.6 |
| 0.125 | 50.5 | 55.9 | 60.3 |
| 0.140 | 63.3 | 69.7 | - |
| 0.160 | 80.00 | 92.0 | - |
| 0.180 | 101.2 | 116.9 | - |
| 0.200 | 120.1 | 160.2 | - |
| Number of Up and Down Nodes | Materials | Length (m) | Actual Diameter (m) | Optimal Diameter (m) | Number of Up and Down Nodes | Materials | Length (m) | Actual Diameter (m) | Optimal Diameter (m) |
|---|---|---|---|---|---|---|---|---|---|
| 0–1 | DIP+PE | 4470 | 0.160 | 0.140 | 21–22 | PE | 35 | 0.025 | 0.025 |
| 1–2 | PVC-U | 50 | 0.160 | 0.140 | 4–23 | PE | 21 | 0.032 | 0.025 |
| 2–3 | PVC-U | 150 | 0.140 | 0.140 | 23–24 | PE | 21 | 0.025 | 0.025 |
| 3–4 | PVC-U | 110 | 0.140 | 0.110 | 5–25 | PE | 21 | 0.032 | 0.025 |
| 4–5 | PVC-U | 110 | 0.125 | 0.110 | 25–26 | PE | 21 | 0.025 | 0.025 |
| 5–6 | PVC-U | 110 | 0.125 | 0.090 | 6–27 | PE | 21 | 0.032 | 0.025 |
| 6–7 | PVC-U | 110 | 0.125 | 0.090 | 27–28 | PE | 21 | 0.025 | 0.025 |
| 7–8 | PVC-U | 110 | 0.110 | 0.090 | 7–29 | PE | 21 | 0.032 | 0.025 |
| 8–9 | PVC-U | 110 | 0.075 | 0.075 | 29–30 | PE | 21 | 0.025 | 0.025 |
| 9–10 | PE | 150 | 0.063 | 0.050 | 8–31 | PE | 35 | 0.063 | 0.040 |
| 1–11 | PE | 60 | 0.040 | 0.050 | 31–32 | PE | 35 | 0.050 | 0.040 |
| 11–12 | PE | 35 | 0.040 | 0.032 | 32–33 | PE | 35 | 0.040 | 0.032 |
| 12–13 | PE | 35 | 0.032 | 0.025 | 33–34 | PE | 35 | 0.032 | 0.025 |
| 13–14 | PE | 35 | 0.025 | 0.025 | 9–35 | PE | 35 | 0.063 | 0.040 |
| 2–15 | PE | 35 | 0.040 | 0.040 | 35–36 | PE | 35 | 0.050 | 0.040 |
| 15–16 | PE | 35 | 0.040 | 0.040 | 36–37 | PE | 35 | 0.050 | 0.032 |
| 16–17 | PE | 35 | 0.032 | 0.025 | 37–38 | PE | 35 | 0.032 | 0.025 |
| 17–18 | PE | 35 | 0.025 | 0.025 | 10–39 | PE | 35 | 0.063 | 0.040 |
| 3–19 | PE | 35 | 0.050 | 0.040 | 39–40 | PE | 35 | 0.050 | 0.040 |
| 19–20 | PE | 35 | 0.050 | 0.040 | 40–41 | PE | 35 | 0.040 | 0.032 |
| 20–21 | PE | 35 | 0.040 | 0.025 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, H.; Chen, Y.; Cheng, J.; Wang, W.; Gong, Y.; Wang, L.; Wang, Y. Optimization of Pressurized Tree-Type Water Distribution Network Using the Improved Decomposition–Dynamic Programming Aggregation Algorithm. Water 2019, 11, 1391. https://doi.org/10.3390/w11071391
Cheng H, Chen Y, Cheng J, Wang W, Gong Y, Wang L, Wang Y. Optimization of Pressurized Tree-Type Water Distribution Network Using the Improved Decomposition–Dynamic Programming Aggregation Algorithm. Water. 2019; 11(7):1391. https://doi.org/10.3390/w11071391
Chicago/Turabian StyleCheng, Haomiao, Yuru Chen, Jilin Cheng, Wenfen Wang, Yi Gong, Liang Wang, and Yulin Wang. 2019. "Optimization of Pressurized Tree-Type Water Distribution Network Using the Improved Decomposition–Dynamic Programming Aggregation Algorithm" Water 11, no. 7: 1391. https://doi.org/10.3390/w11071391
APA StyleCheng, H., Chen, Y., Cheng, J., Wang, W., Gong, Y., Wang, L., & Wang, Y. (2019). Optimization of Pressurized Tree-Type Water Distribution Network Using the Improved Decomposition–Dynamic Programming Aggregation Algorithm. Water, 11(7), 1391. https://doi.org/10.3390/w11071391