An Inverse Transient-Based Optimization Approach to Fault Examination in Water Distribution Networks


Abstract
1. Introduction
1.1. Background and Problem Statement
1.2. Literature Review
1.3. Objective
2. Methodology
2.1. Pipe Network Simulation
2.2. Hydraulic Transient Model and Faults in the Pipeline
2.3. Ordinal Optimization Approach (OOA)
2.4. Symbiotic Organism Search (SOS)
2.5. Inverse Transient Analysis (ITA)
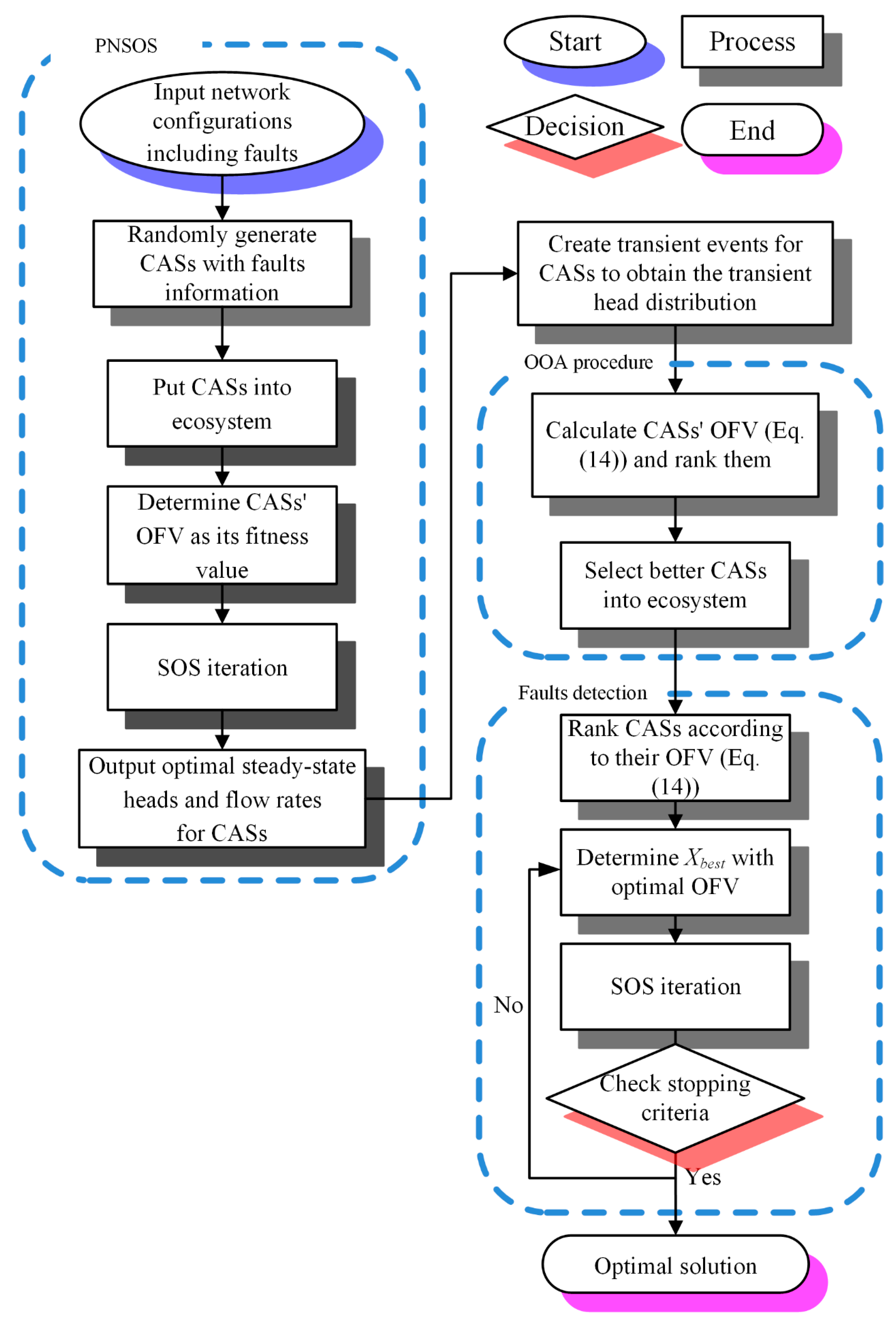
2.6. Development of PEOS
- Import the network configurations;
- Randomly generate candidate solutions (CASes) with different fault information consisting of the unknown variables listed in Table 1;
- Rearrange the network configurations, since the new fault points (leaks and blockages) and/or new fault pipe reaches (deterioration parts) are added;
- Use PNSOS to calculate the optimal steady-state nodal heads and piping flow rates within a given WDN for each CAS;
- Generate hydraulic transient events and apply the MOC to obtain the transient head distribution of each CAS;
- Utilize Equation (14) to calculate the CASes’ objective function values (OFVs) and rank them. The top 5% of CASes with smaller OFVs are selected for the next step;
- Consider the selected CASes to be initial organisms for the ecosystem of the SOS used in the pipe examination;
- Execute the fault detection procedure, in which the organisms containing fault information continually move forward to the current best solution (Xbest), with optimal fault information due to the three states of the SOS;
- Check whether the optimization process satisfies the stopping criterion. If so, the fault detection procedure is then terminated and moves to the next step. Otherwise, the searching process goes on.
2.7. Benchmark Evolutionary Algorithms
3. Laboratory Experiments and PEOS Simulations
3.1. Experiment Configurations
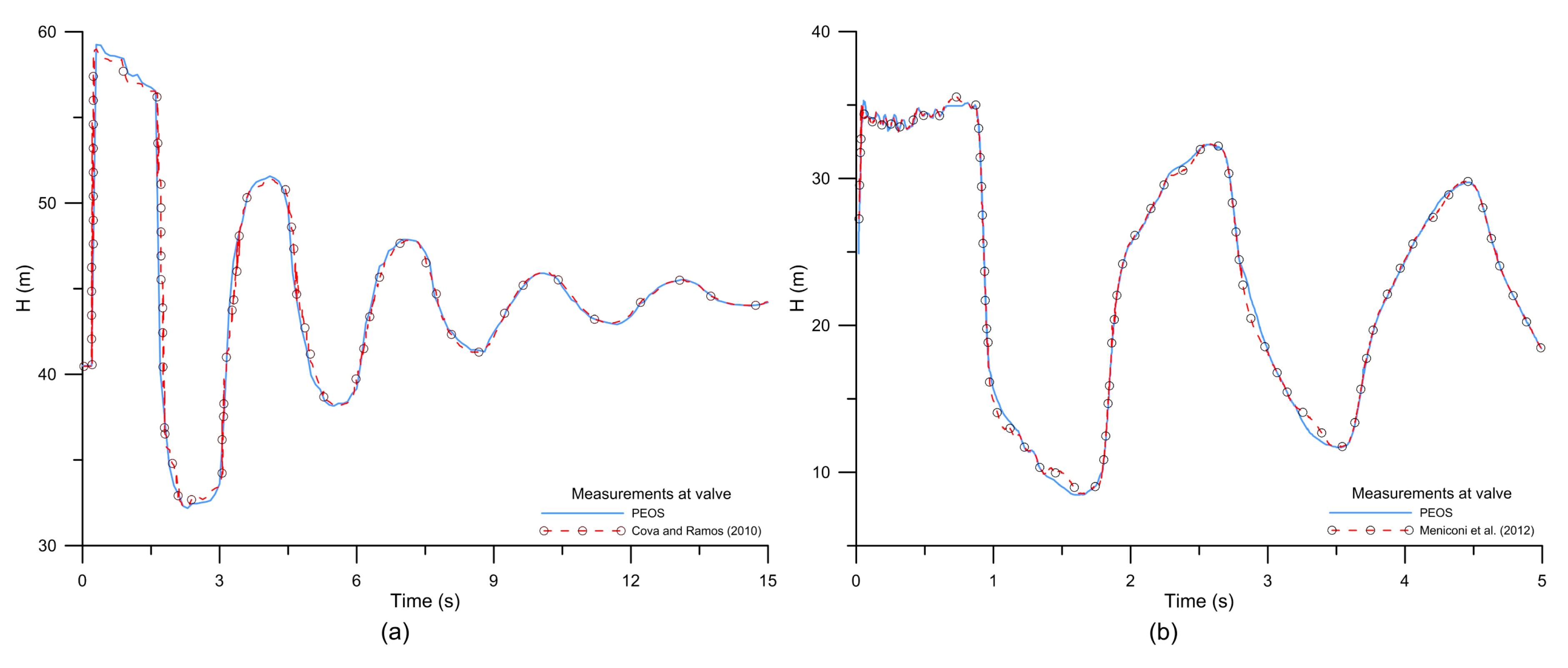
3.2. PEOS Simulation
4. Fault Detection in a Synthetic Pipe Network
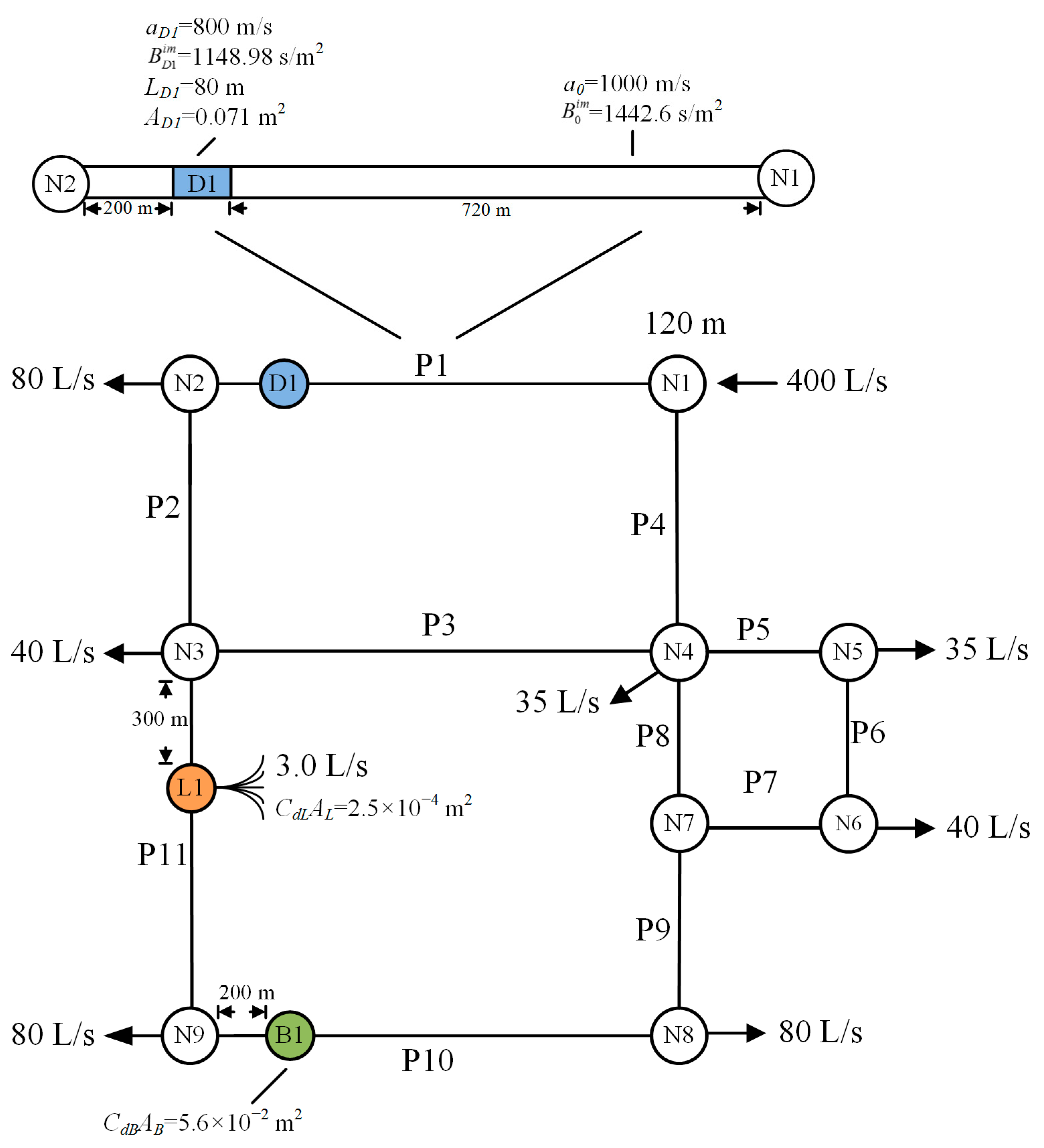
4.1. Simulation Setup and Pipe Network Configuration
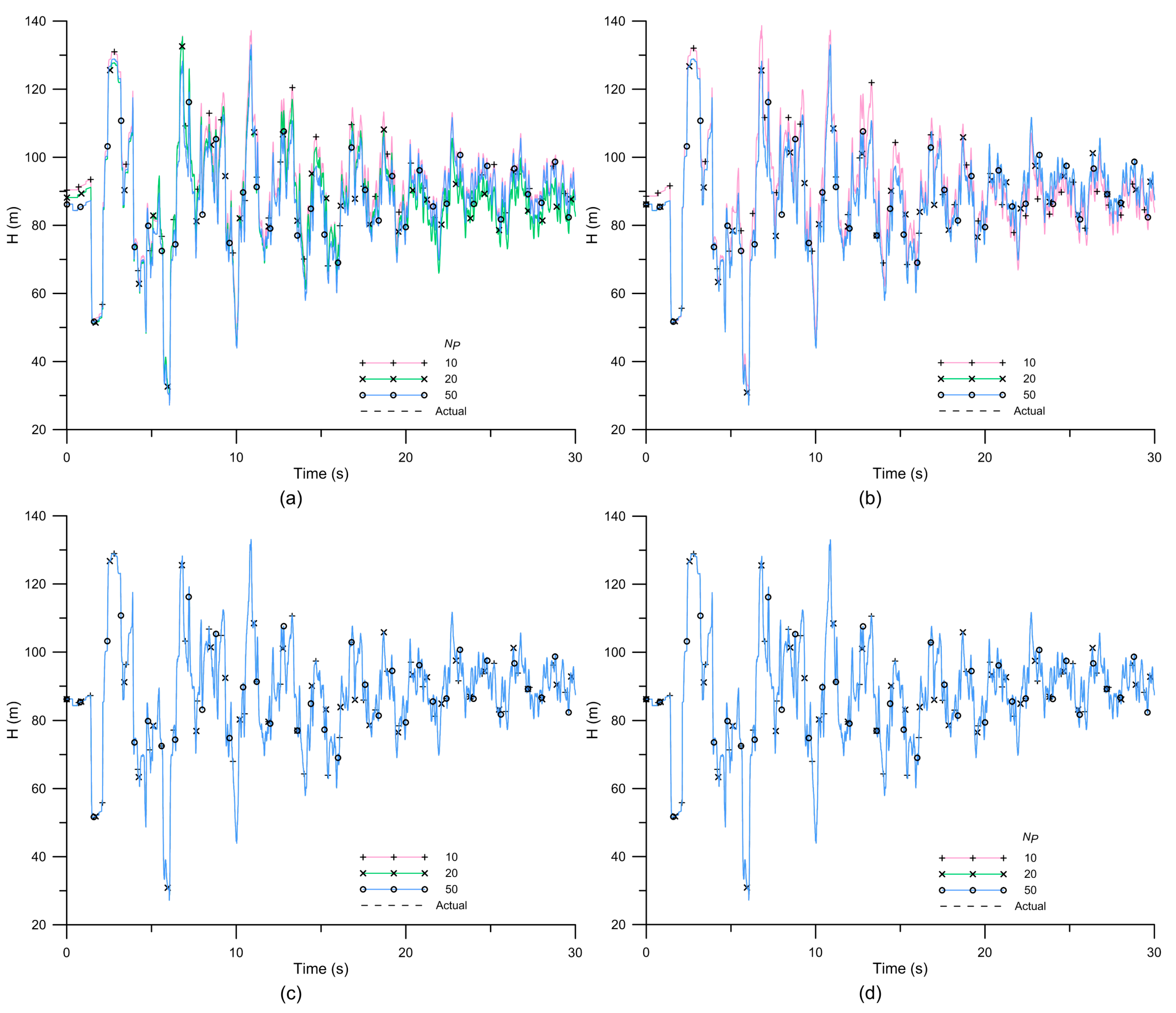
4.2. Validation and Application of PEOS
5. Faults Detection in Large-scale WDN
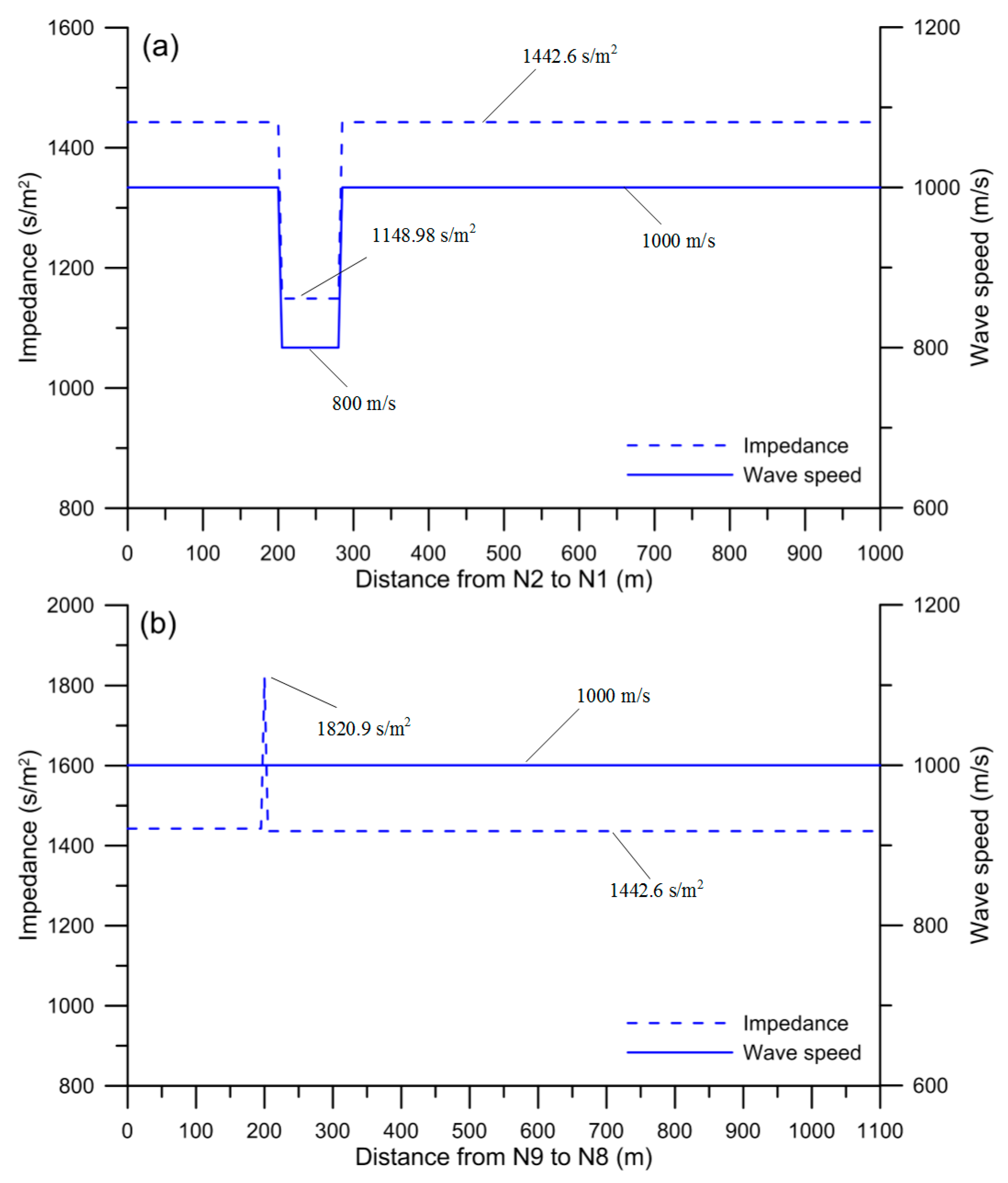
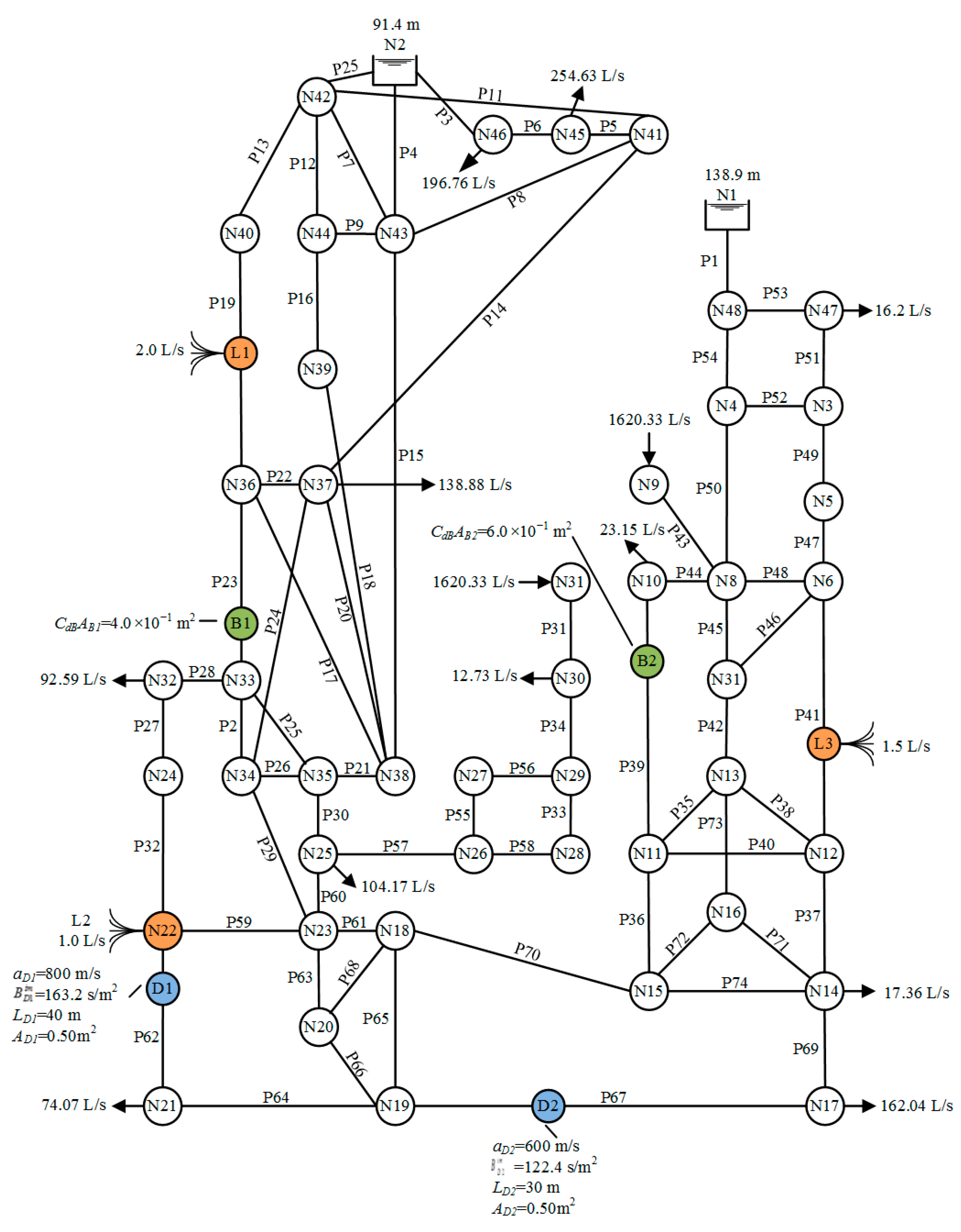
5.1. Simulation Setup and Large-Scale WDN
5.2. Case Description and Error Criteria
5.3. Results and Error Analysis
6. Conclusions
Supplementary Materials
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Bartos, M.; Wong, B.; Kerkez, B. Open storm: A complete framework for sensing and control of urban watersheds. Environ. Sci. Water Res. Technol. 2018, 4, 346–358. [Google Scholar] [CrossRef]
- Scola, I.R.; Besançon, G.; Georges, D. Blockage and leak detection and location in pipelines using frequency response optimization. J. Hydraul. Eng. ASCE 2017, 143, 04016074. [Google Scholar] [CrossRef]
- Moser, G.; Paal, S.G.; Smith, I.F.C. Leak detection of water supply networks using error-domain model falsification. J. Comput. Civil Eng. 2018, 32, 04017077. [Google Scholar] [CrossRef]
- Colombo, A.F.; Lee, P.; Karney, B.W. A selective literature review of transient-based leak detection methods. J. Hydro Environ. Res. 2009, 2, 212–227. [Google Scholar] [CrossRef]
- Puust, R.; Kapelan, Z.; Savić, D.A.; Koppel, T. A review of methods for leakage management in pipe networks. Urban Water J. 2010, 7, 25–45. [Google Scholar] [CrossRef]
- Xin, K.; Li, F.; Tao, T.; Xiang, N.; Yin, Z. Water losses investigation and evaluation in water distribution system—The case of sa city in china. Urban Water J. 2015, 12, 430–439. [Google Scholar] [CrossRef]
- Al-Khomairi, A. Leak detection in long pipelines using the least squares method. J. Hydraul. Res. 2008, 46, 392–401. [Google Scholar] [CrossRef]
- Shamloo, H.; Haghighi, A. Optimum leak detection and calibration of pipe networks by inverse transient analysis. J. Hydraul. Res. 2010, 48, 371–376. [Google Scholar] [CrossRef]
- Huang, Y.C.; Lin, C.C.; Yeh, H.D. An optimization approach to leak detection in pipe networks using simulated annealing. Water Resour. Manag. 2015, 29, 4185–4201. [Google Scholar] [CrossRef]
- Wang, X.J.; Lambert, M.F.; Simpson, A.R. Detection and location of a partial blockage in a pipeline using damping of fluid transients. J. Water Resour. Plan. Manag. ASCE 2005, 131, 244–249. [Google Scholar] [CrossRef]
- Tran, D.H.; Perera, B.J.C.; Ng, A.W.M. Hydraulic deterioration models for storm-water drainage pipes: Ordered probit versus probabilistic neural network. J. Comput. Civil Eng. 2010, 24, 140–150. [Google Scholar] [CrossRef]
- Vreeburg, J.H.G.; Boxall, J.B. Discolouration in potable water distribution systems: A review. Water Res. 2007, 41, 519–529. [Google Scholar] [CrossRef] [PubMed]
- Juliano, T.M.; Meegoda, J.N.; Watts, D.J. Acoustic emission leak detection on a metal pipeline buried in sandy soil. J. Pipeline Syst. Eng. Pract. 2013, 4, 149–155. [Google Scholar] [CrossRef]
- Martini, A.; Troncossi, M.; Rivola, A. Vibroacoustic measurements for detecting water leaks in buried small-diameter plastic pipes. J. Pipeline Syst. Eng. Pract. 2017, 8, 04017022. [Google Scholar] [CrossRef]
- Martini, A.; Rivola, A.; Troncossi, M. Autocorrelation Analysis of Vibro-Acoustic Signals Measured in a Test Field for Water Leak Detection. Appl. Sci. 2018, 8, 2450. [Google Scholar] [CrossRef]
- Yazdekhasti, S.; Piratla, K.R.; Atamturktur, S.; Khan, A. Experimental evaluation of a vibration-based leak detection technique for water pipelines. Struct. Infrastruct. Eng. 2017, 14, 46–55. [Google Scholar] [CrossRef]
- Wang, X.; Lennox, B.; Turner, J.; Lewis, K.; Ding, Z.; Short, G.; Dawson, K. Blockage detection in long lengths of pipeline using a new acoustic method. In Proceedings of the 16th International Congress on Sound and Vibration, Krakow, Poland, 5–9 July 2009. [Google Scholar]
- Lile, N.L.T.; Jaafar, M.H.M.; Roslan, M.R.; Azmi Muhamad, M.S. Blockage detection in circular pipe using vibration analysis. Int. J. Adv. Sci. Eng. Inf. Technol. 2012, 2, 54–57. [Google Scholar] [CrossRef][Green Version]
- Lile, N.L.T.; Hadi, H.; Roslan, M.R. Vibration Analysis of Blocked Circular Pipe Flow. Appl. Mech. Mater. 2012, 165, 197–201. [Google Scholar] [CrossRef]
- Duan, W.; Kirby, R.; Prisutov, J.; Horoshenkov, K.V. On the use of power reflection ratio and phase change to determine the geometry of a blockage in a pipe. Appl. Acoust. 2015, 87, 190–197. [Google Scholar] [CrossRef]
- Holley, M.; Diaz, R.; Giovanniello, M. Acoustic Monitoring of Prestressed Concrete Cylinder Pipe: A Case History. In Proceedings of the Pipeline Division Specialty conference 2001, San Diego, CA, USA, 15–18 July 2001. [Google Scholar]
- Delgadillo, H.H.; Loendersloot, R.; Akkerman, R.; Yntema, D. Development of an inline water mains inspection technology. In Proceedings of the IEEE International Ultrasonics Symposium (IUS), Tours, France, 18–21 September 2016. [Google Scholar]
- Wang, X.H.; Jiao, Y.L.; Yang, J.; Niu, Y.C. The acoustic emission detection and localisation technology of the pipeline crack. Int. J. Sen. Net. 2016, 20, 111–118. [Google Scholar] [CrossRef]
- Li, R.; Huang, H.; Xin, K.; Tao, T. A review of methods for burst/leakage detection and location in water distribution systems. Water Sci. Technol. Water Supply 2015, 15, 429–441. [Google Scholar] [CrossRef]
- Chaudhry, M.H. Applied Hydraulic Transients, 3th ed.; Springer: New York, NY, USA, 2014. [Google Scholar]
- Datta, S.; Sarkar, S. A review on different pipeline fault detection methods. J. Loss Prev. Process Ind. 2016, 41, 97–106. [Google Scholar] [CrossRef]
- Lee, P.J.; Duan, H.F.; Tuck, J.; Ghidaoui, M. Numerical and experimental study on the effect of signal bandwidth on pipe assessment using fluid transients. J. Hydraul. Eng. ASCE 2015, 141, 04014074. [Google Scholar] [CrossRef]
- Sheikholeslami, R.; Talatahari, S. Developed swarm optimizer: A new method for sizing optimization of water distribution systems. J. Comput. Civil Eng. 2016, 30, 04016005. [Google Scholar] [CrossRef]
- Vítkovský, J.P.; Simpson, A.R.; Lambert, M.F. Leak detection and calibration using transients and genetic algorithms. J. Water Resour. Plan. Manag. ASCE 2000, 126, 262–265. [Google Scholar] [CrossRef]
- Liggett, J.A.; Chen, L.C. Inverse transient analysis in pipe networks. J. Hydraul. Eng. ASCE 1994, 120, 934–955. [Google Scholar] [CrossRef]
- Vítkovský, J.P.; Lambert, M.F.; Simpson, A.R.; Liggett, J.A. Experimental observation and analysis of inverse transients for pipeline leak detection. J. Water Resour. Plan. Manag. ASCE 2007, 133, 519–530. [Google Scholar] [CrossRef]
- Jung, B.S.; Karney, B.W. Systematic exploration of pipeline network calibration using transients. J. Hydraul. Res. 2008, 46, 129–137. [Google Scholar] [CrossRef]
- Haghighi, A.; Ramos, H.M. Detection of leakage freshwater and friction factor calibration in drinking networks using central force optimization. Water Resour. Manag. 2012, 26, 2347–2363. [Google Scholar] [CrossRef]
- Covelli, C.; Cozzolino, L.; Cimorelli, L.; Della Morte, R.; Pianese, D. Optimal location and setting of prvs in wds for leakage minimization. Water Resour. Manag. 2016, 30, 1803–1817. [Google Scholar] [CrossRef]
- Meniconi, S.; Duan, H.F.; Lee, P.J.; Brunone, B.; Ghidaoui, M.S.; Ferrante, M. Experimental investigation of coupled frequency and time-domain transient test-based techniques for partial blockage detection in pipelines. J. Hydraul. Eng. ASCE 2013, 139, 1033–1040. [Google Scholar] [CrossRef]
- Mohapatra, P.K.; Chaudhry, M.H.; Kassem, A.A.; Moloo, J. Detection of partial blockage in single pipelines. J. Hydraul. Eng. ASCE 2006, 132, 200–206. [Google Scholar] [CrossRef]
- Lee, P.J.; Vítkovský, J.P.; Lambert, M.F.; Simpson, A.R.; Liggett, J.A. Discrete blockage detection in pipelines using the frequency response diagram: Numerical study. J. Hydraul. Eng. ASCE 2008, 134, 658–663. [Google Scholar] [CrossRef]
- Duan, H.F.; Lee, P.J.; Ghidaoui, M. Transient wave-blockage interaction in pressurized water pipelines. Procedia Eng. 2014, 70, 573–582. [Google Scholar] [CrossRef]
- Gong, J.; Lambert, M.F.; Simpson, A.R.; Zecchin, A.C. Detection of localized deterioration distributed along single pipelines by reconstructive moc analysis. J. Hydraul. Eng. ASCE 2014, 140, 190–198. [Google Scholar] [CrossRef]
- Stephens, M.L.; Simpson, A.R.; Lambert, M.F. Internal wall condition assessment for water pipelines using inverse transient analysis. In Proceedings of the 10th Annual Symposium on Water Distribution Systems Analysis, American Society of Civil Engineers, Kruger National Park, South Africa, 17–20 August 2008. [Google Scholar]
- Stephens, M.L.; Lambert, M.F.; Simpson, A.R. Determining the internal wall condition of a water pipeline in the field using an inverse transient. J. Hydraul. Eng. ASCE 2013, 139, 310–324. [Google Scholar] [CrossRef]
- Hachem, F.E.; Schleiss, A.J. Detection of local wall stiffness drop in steel-lined pressure tunnels and shafts of hydroelectric power plants using steep pressure wave excitation and wavelet decomposition. J. Hydraul. Eng. ASCE 2012, 138, 35–45. [Google Scholar] [CrossRef]
- Gong, J.; Simpson, A.R.; Lambert, M.F.; Zecchin, A.C.; Kim, Y.i.; Tijsseling, A.S. Detection of distributed deterioration in single pipes using transient reflections. J. Pipeline Syst. Eng. Pract. 2013, 4, 32–40. [Google Scholar] [CrossRef]
- Gong, J.; Lambert, M.F.; Nguyen, S.T.N.; Zecchin, A.C.; Simpson, A.R. Detecting thinner-walled pipe sections using a spark transient pressure wave generator. J. Hydraul. Eng. ASCE 2018, 144, 06017027. [Google Scholar] [CrossRef]
- Cobacho, R.; Arregui, F.; Soriano, J.; Cabrera, E. Including leakage in network models: An application to calibrate leak valves in EPANET. J. Water Supply Res. Technol. Aqua 2015, 64, 130–138. [Google Scholar] [CrossRef]
- Yeh, H.D.; Lin, Y.C. Pipe network system analysis using simulated annealing. J. Water Supply Res. Technol. Aqua 2008, 57, 317–327. [Google Scholar] [CrossRef]
- Mays, L.W. Water Supply Systems Security; McGraw-Hill: New York, NY, USA, 2004. [Google Scholar]
- Savić, D.A.; Banyard, J.K. Water Distribution Systems, 2nd ed.; ICE: London, UK, 2011. [Google Scholar]
- Seifollahi-Aghmiuni, S.; Bozorg Haddad, O.; Omid, M.H.; Mariño, M.A. Effects of pipe roughness uncertainty on water distribution network performance during its operational period. Water Resour. Manag. 2013, 27, 1581–1599. [Google Scholar] [CrossRef]
- Larock, B.E.; Jeppson, R.W.; Watters, G.Z. Hydraulics of Pipeline Systems, 1st ed.; CRC Press: Boca Raton, FL, USA, 2000. [Google Scholar]
- Duan, H.F.; Ghidaoui, M.; Lee, P.J.; Tung, Y.K. Unsteady friction and visco-elasticity in pipe fluid transients. J. Hydraul. Res. 2010, 48, 354–362. [Google Scholar] [CrossRef]
- Reddy, H.P.; Silva-Araya, W.F.; Chaudhry, M.H. Estimation of decay coefficients for unsteady friction for instantaneous, acceleration-based models. J. Hydraul. Eng. ASCE 2012, 138, 260–271. [Google Scholar] [CrossRef]
- Bergant, A.; Tijsseling, A.S.; Vítkovský, J.P.; Covas, D.I.C.; Simpson, A.R.; Lambert, M.F. Parameters affecting water-hammer wave attenuation, shape and timing—Part 1: Mathematical tools. J. Hydraul. Res. 2008, 46, 373–381. [Google Scholar] [CrossRef]
- Stephens, M.L.; Simpson, A.R.; Lambert, M.F. Hydraulic transient analysis and discrete blockage detection on distribution pipelines: Field tests, model calibration, and inverse modeling. In Proceedings of the World Environmental and Water Resources Congress 2007, Tampa, FL, USA, 15–19 May 2007. [Google Scholar]
- Ho, Y.C.; Cassandras, C.G.; Chen, C.H.; Dai, L. Ordinal optimisation and simulation. J. Oper. Res. Soc. 2000, 51, 490–500. [Google Scholar] [CrossRef]
- Cheng, M.Y.; Prayogo, D. Symbiotic organisms search: A new metaheuristic optimization algorithm. Comput. Struct. 2014, 139, 98–112. [Google Scholar] [CrossRef]
- Cheng, M.Y.; Prayogo, D.; Tran, D.H. Optimizing multiple-resources leveling in multiple projects using discrete symbiotic organisms search. J. Comput. Civil Eng. 2016, 30, 04015036. [Google Scholar] [CrossRef]
- Pudar, R.S.; Liggett, J.A. Leaks in pipe networks. J. Hydraul. Eng. ASCE 1992, 118, 1031–1046. [Google Scholar] [CrossRef]
- Abhulimen, K.E.; Susu, A.A. Liquid pipeline leak detection system: Model development and numerical simulation. Chem. Eng. J. 2004, 97, 47–67. [Google Scholar] [CrossRef]
- Simpson, R.A.; Dandy, C.G.; Murphy, J.L. Genetic algorithms compared to other techniques for pipe optimization. J. Water Resour. Plan. Manag. ASCE 1994, 120, 423–443. [Google Scholar] [CrossRef]
- Jung, B.S.; Karney, B. Fluid transients and pipeline optimization using ga and pso: The diameter connection. Urban Water J. 2004, 1, 167–176. [Google Scholar] [CrossRef]
- Covas, D.; Ramos, H. Case Studies of Leak Detection and Location in Water Pipe Systems by Inverse Transient Analysis. J. Water Resour. Plan. Manag. ASCE 2010, 136, 248–257. [Google Scholar] [CrossRef]
- Meniconi, S.; Brunone, B.; Ferrante, M. Water-hammer pressure waves interaction at cross-section changes in series in viscoelastic pipes. J. Fluids Struct. 2012, 33, 44–58. [Google Scholar] [CrossRef]
- Chin, K.K.; Gay, R.K.L.; Chua, S.H.; Chan, C.H.; Ho, S.Y. Solution of water networks by sparse matrix methods. Int. J. Numer. Methods Eng. 1978, 12, 1261–1277. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description |
|---|---|
| Leak | |
| Lp | Leak pipe number |
| LL | Leak location |
| CdLAL | Discharge coefficient times the leak area of the orifice |
| Blockage | |
| Bp | Blockage pipe number |
| BL | Blockage location |
| CdBAB | Discharge coefficient times the open orifice area of the blockage |
| Deterioration | |
| Dp | Deterioration pipe number |
| DL | Deterioration location |
| LDi | Length of ith distributed deterioration reach |
| aDi | Wave speed of ith distributed deterioration reach |
| ADi | Pipe cross-sectional area of ith distributed deterioration reach |
| PEGA | PEPSO | PESOS and PEOS |
|---|---|---|
| m = 0.01 | w = 0.9~0.7 | No specific parameters required |
| c = 0.8 | v = Xmin/10~Xmax/10 | |
| g = 0.9 | - |
| IC pipeline | L1 | L2 | |||||||||
| Lp | LL (m) | CdLAL (m2) | E (%) | Lp | LL (m) | CdLAL (m2) | E (%) | ||||
| Actual | 2 | 15.95 | 1.21 × 10−5 | - | 3 | 46.32 | 1.50 × 10−5 | - | |||
| PEOS | 2 | 16 | 1.23 × 10−5 | 1.65 | 3 | 46 | 1.52 × 10−5 | 1.33 | |||
| WEL pipeline | B1 | ||||||||||
| Bp | BL (m) | CdBAB (m2) | E (%) | ||||||||
| Actual | 2 | 38.96 | 1.18 × 10−3 | - | |||||||
| PEOS | 2 | 38 | 1.20 × 10−3 | 1.69 | |||||||
| Pipe | Node | Diameter (mm) | Length (m) | Impedance (s/m2) | Year Used (year) | CHW(t) | |
|---|---|---|---|---|---|---|---|
| From | To | ||||||
| P1 | N1 | N2 | 300.0 | 1000.0 | 1442.60 | 10 | 108.2 |
| P2 | N2 | N3 | 300.0 | 1000.0 | 1442.60 | 15 | 90.2 |
| P3 | N3 | N4 | 250.0 | 1100.0 | 2077.35 | 10 | 105.7 |
| P4 | N1 | N4 | 400.0 | 1250.0 | 811.47 | 15 | 92.2 |
| P5 | N4 | N5 | 200.0 | 500.0 | 3245.86 | 5 | 112.1 |
| P6 | N5 | N6 | 400.0 | 400.0 | 811.47 | 5 | 114.2 |
| P7 | N7 | N6 | 200.0 | 500.0 | 3245.86 | 5 | 112.1 |
| P8 | N4 | N7 | 350.0 | 400.0 | 1059.87 | 5 | 113.6 |
| P9 | N7 | N8 | 350.0 | 600.0 | 1059.87 | 5 | 113.6 |
| P10 | N8 | N9 | 300.0 | 1100.0 | 1442.60 | 10 | 108.2 |
| P11 | N3 | N9 | 300.0 | 1250.0 | 1442.60 | 15 | 90.2 |
| NP | Method | L1 | B1 | D1 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Lp | LL (m) | CdLAL (m2) | BP | BL (m) | CdBAB (m2) | DP | DL (m) | LD (m) | aD (m/s) | (s/m2) | ||
| Actual | 11 | 300 | 2.50 × 10−4 | 10 | 200 | 5.60 × 10−2 | 1 | 200 | 80 | 800 | 1148.98 | |
| 10 | PEGA | 2 | 650 | 3.27 × 10−4 | Not detected | Not detected | ||||||
| PEPSO | 11 | 830 | 3.19 × 10−4 | Not detected | 3 | 510 | 100 | 805 | 1156.16 | |||
| PESOS | 11 | 300 | 2.49 × 10−4 | 10 | 200 | 5.58 × 10−2 | 1 | 200 | 80 | 800 | 1148.98 | |
| PEOS | 11 | 300 | 2.51 × 10−4 | 10 | 200 | 5.61 × 10−2 | 1 | 200 | 80 | 800 | 1148.98 | |
| 20 | PEGA | 11 | 510 | 3.34 × 10−4 | Not detected | 3 | 490 | 70 | 805 | 1156.16 | ||
| PEPSO | 11 | 300 | 2.49 × 10−4 | 10 | 200 | 5.61 × 10−2 | 3 | 700 | 70 | 805 | 1156.16 | |
| PESOS | 11 | 300 | 2.50 × 10−4 | 10 | 200 | 5.59 × 10−2 | 1 | 200 | 80 | 800 | 1148.98 | |
| PEOS | 11 | 300 | 2.50 × 10−4 | 10 | 200 | 5.60 × 10−2 | 1 | 200 | 80 | 800 | 1148.98 | |
| 50 | PEGA | 11 | 300 | 2.49 × 10−4 | 10 | 200 | 5.60 × 10−2 | 1 | 200 | 80 | 800 | 1148.98 |
| PEPSO | 11 | 300 | 2.49 × 10−4 | 10 | 200 | 5.60 × 10−2 | 1 | 200 | 80 | 800 | 1148.98 | |
| PESOS | 11 | 300 | 2.50 × 10−4 | 10 | 200 | 5.59 × 10−2 | 1 | 200 | 80 | 800 | 1148.98 | |
| PEOS | 11 | 300 | 2.50 × 10−4 | 10 | 200 | 5.60 × 10−2 | 1 | 200 | 80 | 800 | 1148.98 | |
| Method | Round | CPU Time (min) | Average Time (min) | Iterations | Average Iterations |
|---|---|---|---|---|---|
| PEGA | 1 | 325 | 331.2 | 8021 | 8072 |
| 2 | 346 | 8216 | |||
| 3 | 322 | 8124 | |||
| 4 | 324 | 7983 | |||
| 5 | 339 | 8016 | |||
| PEPSO | 1 | 310 | 302.2 | 7502 | 7604 |
| 2 | 308 | 7551 | |||
| 3 | 312 | 7669 | |||
| 4 | 294 | 7606 | |||
| 5 | 287 | 7710 | |||
| PESOS | 1 | 101 | 105.4 | 3789 | 3882 |
| 2 | 107 | 4012 | |||
| 3 | 108 | 3883 | |||
| 4 | 110 | 3810 | |||
| 5 | 101 | 3915 | |||
| PEOS | 1 | 56 | 50.6 | 1415 | 1382 |
| 2 | 49 | 1371 | |||
| 3 | 46 | 1337 | |||
| 4 | 52 | 1396 | |||
| 5 | 50 | 1391 |
| Pipe | Node | Diameter (mm) | Length (m) | Impedance (s/m2) | Year Used (year) | CHW(t) | |
|---|---|---|---|---|---|---|---|
| From | To | ||||||
| P1 | N48 | N1 | 950.0 | 240.0 | 143.86 | 5 | 120.5 |
| P2 | N34 | N33 | 900.0 | 60.0 | 160.29 | 10 | 113.5 |
| P3 | N2 | N46 | 1450.0 | 1830.0 | 61.75 | 0 | 130.0 |
| P4 | N43 | N2 | 1150.0 | 3550.0 | 98.17 | 0 | 130.0 |
| P5 | N41 | N45 | 1450.0 | 1220.0 | 61.75 | 0 | 130.0 |
| P6 | N45 | N46 | 1450.0 | 640.0 | 61.75 | 0 | 130.0 |
| P7 | N42 | N43 | 900.0 | 60.0 | 160.29 | 10 | 113.5 |
| P8 | N41 | N43 | 900.0 | 60.0 | 160.29 | 10 | 113.5 |
| P9 | N44 | N43 | 1000.0 | 50.0 | 129.83 | 10 | 114.6 |
| P10 | N42 | N2 | 900.0 | 3660.0 | 160.29 | 10 | 113.5 |
| P11 | N41 | N42 | 900.0 | 60.0 | 160.29 | 10 | 113.5 |
| P12 | N42 | N44 | 1000.0 | 60.0 | 129.83 | 10 | 114.6 |
| P13 | N40 | N42 | 900.0 | 800.0 | 160.29 | 10 | 113.5 |
| P14 | N37 | N41 | 1450.0 | 3140.0 | 61.75 | 0 | 130.0 |
| P15 | N38 | N43 | 1150.0 | 3140.0 | 98.17 | 0 | 130.0 |
| P16 | N39 | N44 | 1650.0 | 3140.0 | 47.69 | 0 | 130.0 |
| P17 | N38 | N36 | 900.0 | 60.0 | 160.29 | 10 | 113.5 |
| P18 | N38 | N39 | 1000.0 | 60.0 | 129.83 | 10 | 114.6 |
| P19 | N36 | N40 | 800.0 | 2300.0 | 202.87 | 10 | 112.8 |
| P20 | N38 | N37 | 900.0 | 60.0 | 160.29 | 10 | 113.5 |
| P21 | N35 | N38 | 1150.0 | 4050.0 | 98.17 | 0 | 130.0 |
| P22 | N36 | N37 | 900.0 | 60.0 | 160.29 | 10 | 113.5 |
| P23 | N33 | N36 | 800.0 | 4050.0 | 202.87 | 10 | 112.8 |
| P24 | N34 | N37 | 1150.0 | 4050.0 | 98.17 | 0 | 130.0 |
| P25 | N33 | N35 | 900.0 | 60.0 | 160.29 | 10 | 113.5 |
| P26 | N34 | N35 | 900.0 | 60.0 | 160.29 | 10 | 113.5 |
| P27 | N25 | N32 | 800.0 | 2150.0 | 202.87 | 10 | 112.8 |
| P28 | N32 | N33 | 800.0 | 180.0 | 202.87 | 10 | 112.8 |
| P29 | N23 | N34 | 1450.0 | 2980.0 | 61.75 | 0 | 130.0 |
| P30 | N25 | N35 | 1450.0 | 2980.0 | 61.75 | 0 | 130.0 |
| P31 | N31 | N30 | 1650.0 | 12,000.0 | 47.69 | 0 | 130.0 |
| P32 | N22 | N24 | 950.0 | 670.0 | 143.86 | 10 | 114.0 |
| P33 | N29 | N28 | 1000.0 | 60.0 | 129.83 | 10 | 114.6 |
| P34 | N30 | N29 | 1650.0 | 13400.0 | 47.69 | 0 | 130.0 |
| P35 | N13 | N11 | 900.0 | 80.0 | 160.29 | 10 | 113.5 |
| P36 | N11 | N15 | 950.0 | 4290.0 | 143.86 | 5 | 120.5 |
| P37 | N12 | N14 | 900.0 | 4290.0 | 160.29 | 5 | 115.7 |
| P38 | N13 | N12 | 50.0 | 60.0 | 51,933.76 | 10 | 102.6 |
| P39 | N10 | N11 | 970.0 | 2590.0 | 137.99 | 5 | 120.5 |
| P40 | N11 | N12 | 50.0 | 60.0 | 51,933.76 | 10 | 102.6 |
| P41 | N6 | N12 | 900.0 | 2960.0 | 160.29 | 5 | 115.7 |
| P42 | N7 | N13 | 1150.0 | 2960.0 | 98.17 | 0 | 130.0 |
| P43 | N9 | N8 | 1150.0 | 2280.0 | 98.17 | 0 | 130.0 |
| P44 | N8 | N10 | 950.0 | 370.0 | 143.86 | 5 | 120.5 |
| P45 | N8 | N7 | 1000.0 | 90.0 | 129.83 | 0 | 130.0 |
| P46 | N6 | N7 | 50.0 | 60.0 | 51,933.76 | 10 | 102.6 |
| P47 | N5 | N6 | 900.0 | 1610.0 | 160.29 | 5 | 115.7 |
| P48 | N6 | N8 | 50.0 | 60.0 | 51,933.76 | 10 | 102.6 |
| P49 | N3 | N5 | 950.0 | 1350.0 | 143.86 | 5 | 120.5 |
| P50 | N4 | N8 | 50.0 | 2960.0 | 51,933.76 | 10 | 102.6 |
| P51 | N47 | N3 | 950.0 | 6530.0 | 143.86 | 5 | 120.5 |
| P52 | N3 | N4 | 900.0 | 60.0 | 160.29 | 10 | 113.5 |
| P53 | N48 | N47 | 950.0 | 230.0 | 143.86 | 5 | 120.5 |
| P54 | N48 | N4 | 950.0 | 7200.0 | 143.86 | 5 | 120.5 |
| P55 | N27 | N26 | 1000.0 | 60.0 | 129.83 | 10 | 114.6 |
| P56 | N29 | N27 | 1150.0 | 3200.0 | 98.17 | 0 | 130.0 |
| P57 | N26 | N25 | 1450.0 | 4300.0 | 61.75 | 0 | 130.0 |
| P58 | N28 | N26 | 1150.0 | 3200.0 | 98.17 | 0 | 130.0 |
| P59 | N22 | N23 | 800.0 | 80.0 | 202.87 | 10 | 112.8 |
| P60 | N23 | N25 | 750.0 | 90.0 | 230.82 | 0 | 130.0 |
| P61 | N18 | N23 | 950.0 | 2050.0 | 143.86 | 5 | 120.5 |
| P62 | N21 | N22 | 800.0 | 2380.0 | 202.87 | 10 | 112.8 |
| P63 | N20 | N23 | 1150.0 | 3050.0 | 98.17 | 0 | 130.0 |
| P64 | N19 | N21 | 50.0 | 670.0 | 51,933.76 | 5 | 105.8 |
| P65 | N18 | N19 | 50.0 | 60.0 | 51,933.76 | 10 | 102.6 |
| P66 | N19 | N20 | 50.0 | 60.0 | 51,933.76 | 10 | 102.6 |
| P67 | N17 | N19 | 800.0 | 1830.0 | 202.87 | 10 | 112.8 |
| P68 | N18 | N20 | 900.0 | 60.0 | 160.29 | 10 | 113.5 |
| P69 | N14 | N17 | 800.0 | 1950.0 | 202.87 | 10 | 112.8 |
| P70 | N15 | N18 | 950.0 | 3780.0 | 143.86 | 5 | 120.5 |
| P71 | N16 | N14 | 50.0 | 60.0 | 51,933.76 | 5 | 105.8 |
| P72 | N16 | N15 | 900.0 | 60.0 | 160.29 | 10 | 113.5 |
| P73 | N13 | N16 | 1150.0 | 4290.0 | 98.17 | 0 | 130.0 |
| P74 | N14 | N15 | 50.0 | 60.0 | 51,933.76 | 5 | 105.8 |
| Case | Leak | Blockage | Deterioration | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| No. | Lp | LL (m) | CdLAL (m2) | E (%) | No. | BP | BL (m) | CdBAB (m2) | E (%) | No. | DP | DL (m) | LD (m) | aD (m/s) | (s/m2) | |||
| Actual | L1 | 19 | 1150 | 2.00 × 10−4 | - | B1 | 23 | 200 | 4.00 × 10−1 | - | D1 | 62 | 400 | 40 | 800 | 163.2 | ||
| L2 | 32 | 0 | 1.00 × 10−4 | - | B2 | 39 | 600 | 6.00 × 10−1 | - | D2 | 67 | 600 | 30 | 600 | 122.4 | |||
| L3 | 41 | 960 | 1.20 × 10−4 | - | - | - | - | |||||||||||
| Case 1 | L1 | 19 | 1150 | 1.98 × 10−4 | 1.00 | B1 | 23 | 190 | 3.98 × 10−1 | 0.50 | D1 | 62 | 400 | 40 | 799.2 | 163.0 | ||
| L2 | 32 | 0 | 1.01 × 10−4 | 1.00 | B2 | 39 | 600 | 6.04 × 10−1 | 0.67 | D2 | 67 | 600 | 30 | 603.1 | 123.0 | |||
| L3 | 41 | 950 | 1.18 × 10−4 | 1.67 | - | - | - | |||||||||||
| Case 2 | L1 | 19 | 1160 | 1.88 × 10−4 | 6.00 | B1 | 23 | 200 | 3.79 × 10−1 | 5.25 | D1 | 62 | 390 | 40 | 794.3 | 162.0 | ||
| L2 | 32 | 0 | 0.98 × 10−4 | 2.00 | B2 | 39 | 610 | 5.75 × 10−1 | 4.17 | D2 | 67 | 610 | 30 | 595.8 | 121.5 | |||
| L3 | 41 | 950 | 1.11 × 10−4 | 5.83 | - | - | ||||||||||||
| Case 3 | L1 | 19 | 1150 | 1.96 × 10−4 | 2.00 | B1 | 23 | 190 | 3.94 × 10−4 | 1.50 | D1 | 62 | 400 | 40 | 798.5 | 162.9 | ||
| L2 | 32 | 0 | 0.99 × 10−4 | 1.00 | B2 | 39 | 600 | 6.07 × 10−4 | 1.16 | D2 | 67 | 600 | 30 | 598.2 | 122.1 | |||
| L3 | 41 | 950 | 1.17 × 10−4 | 2.50 | - | - | - | |||||||||||
| Case | Prediction Errors | |
|---|---|---|
| ME (m) | SEE (m) | |
| 1 | 3.41 × 10−6 | 1.27 × 10−4 |
| 2 | 1.73 × 10−4 | 6.35 × 10−2 |
| 3 | 3.29 × 10−6 | 1.12 × 10−4 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, C.-C.; Yeh, H.-D. An Inverse Transient-Based Optimization Approach to Fault Examination in Water Distribution Networks. Water 2019, 11, 1154. https://doi.org/10.3390/w11061154
Lin C-C, Yeh H-D. An Inverse Transient-Based Optimization Approach to Fault Examination in Water Distribution Networks. Water. 2019; 11(6):1154. https://doi.org/10.3390/w11061154
Chicago/Turabian StyleLin, Chao-Chih, and Hund-Der Yeh. 2019. "An Inverse Transient-Based Optimization Approach to Fault Examination in Water Distribution Networks" Water 11, no. 6: 1154. https://doi.org/10.3390/w11061154
APA StyleLin, C.-C., & Yeh, H.-D. (2019). An Inverse Transient-Based Optimization Approach to Fault Examination in Water Distribution Networks. Water, 11(6), 1154. https://doi.org/10.3390/w11061154