Integrated Real-Time Flood Forecasting and Inundation Analysis in Small–Medium Streams

Abstract
:1. Introduction
2. Methodology
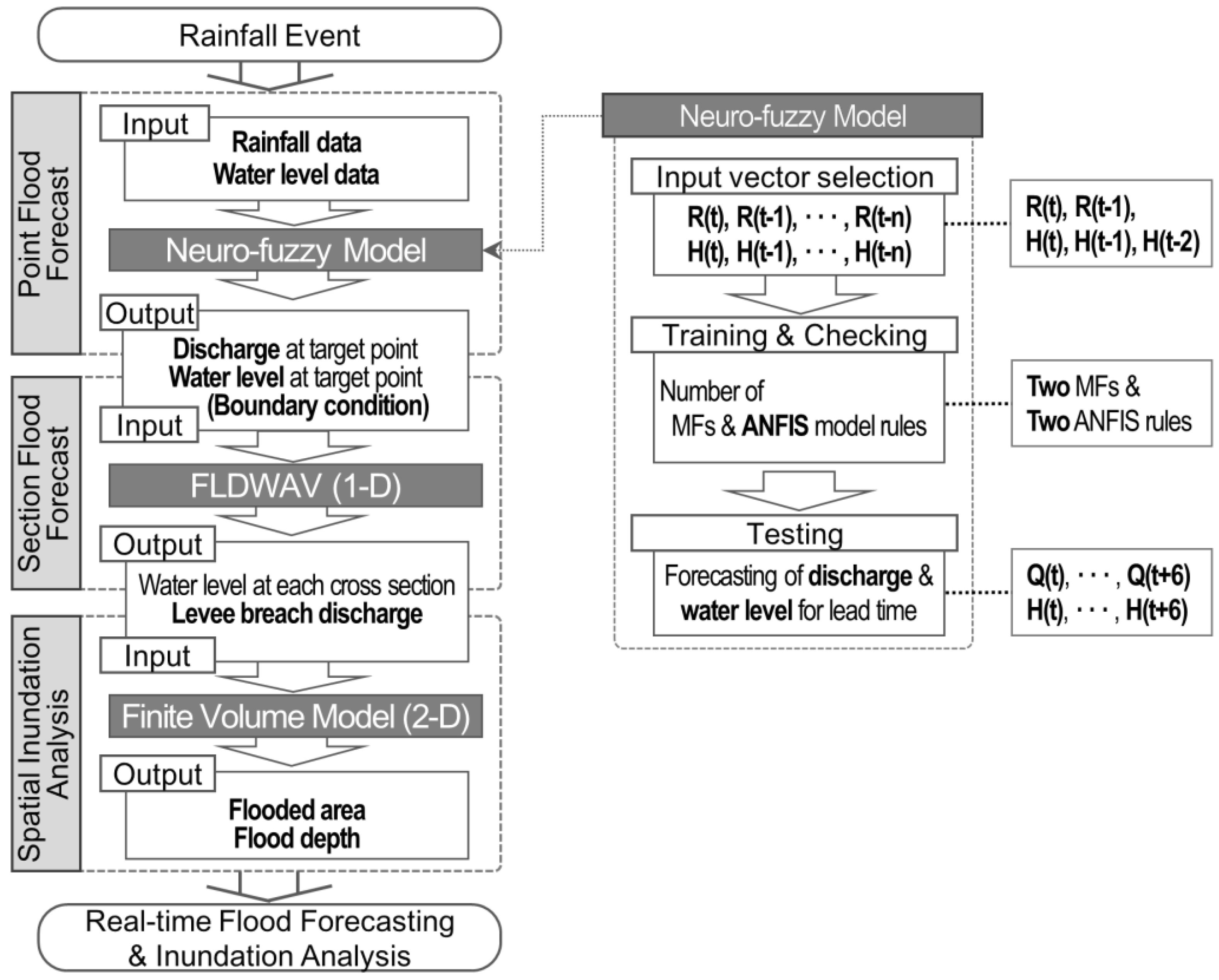
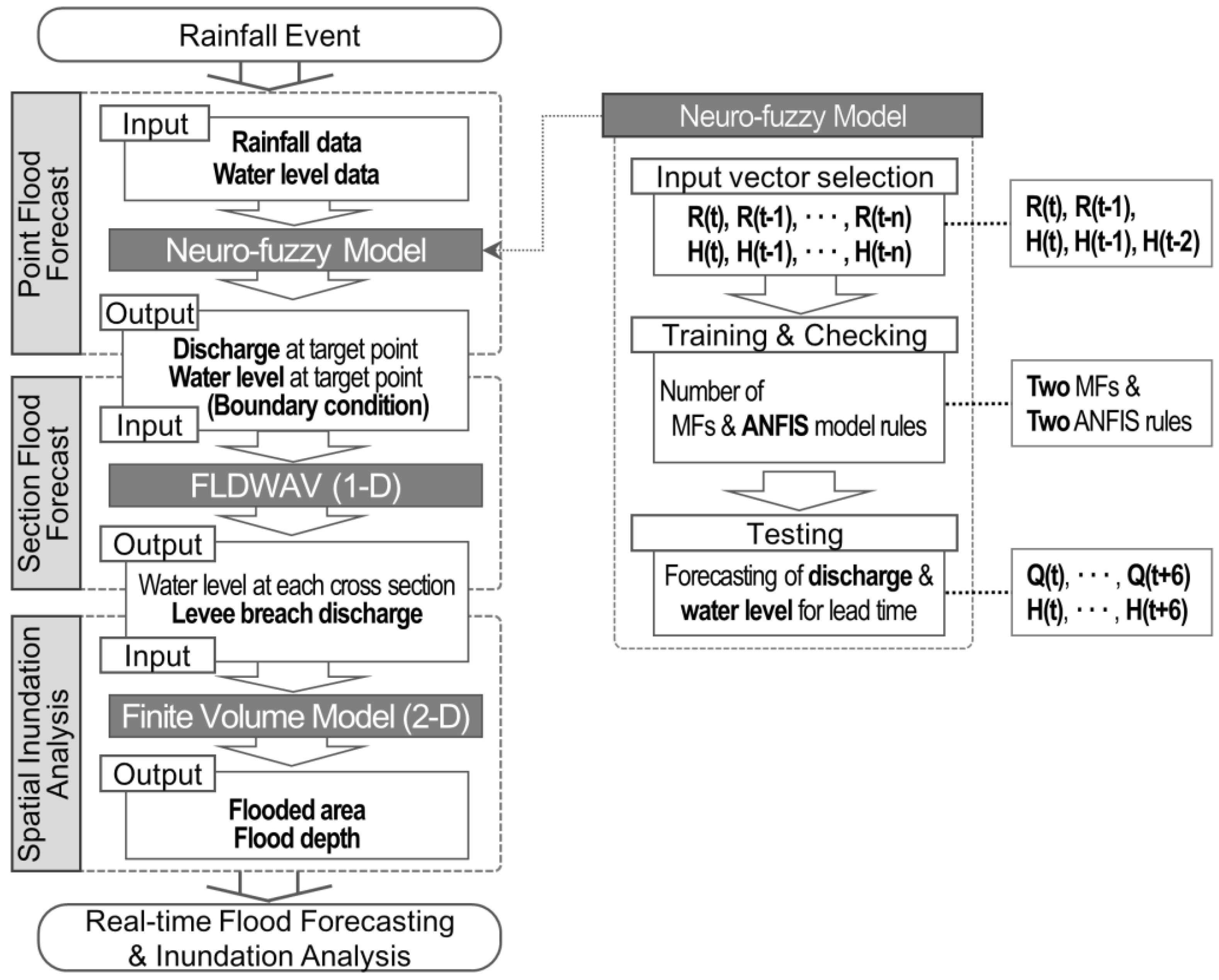
2.1. Method of This Study
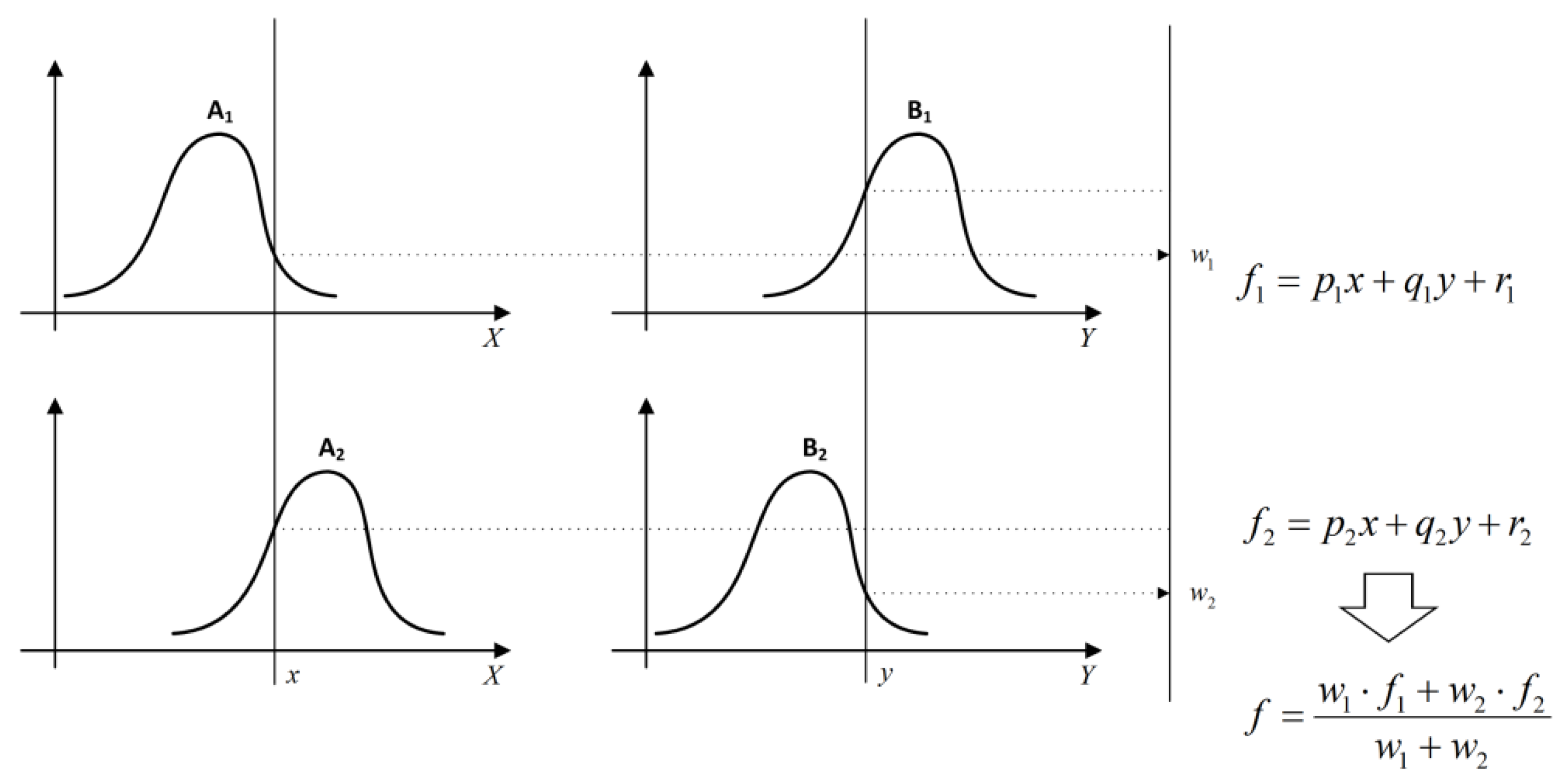
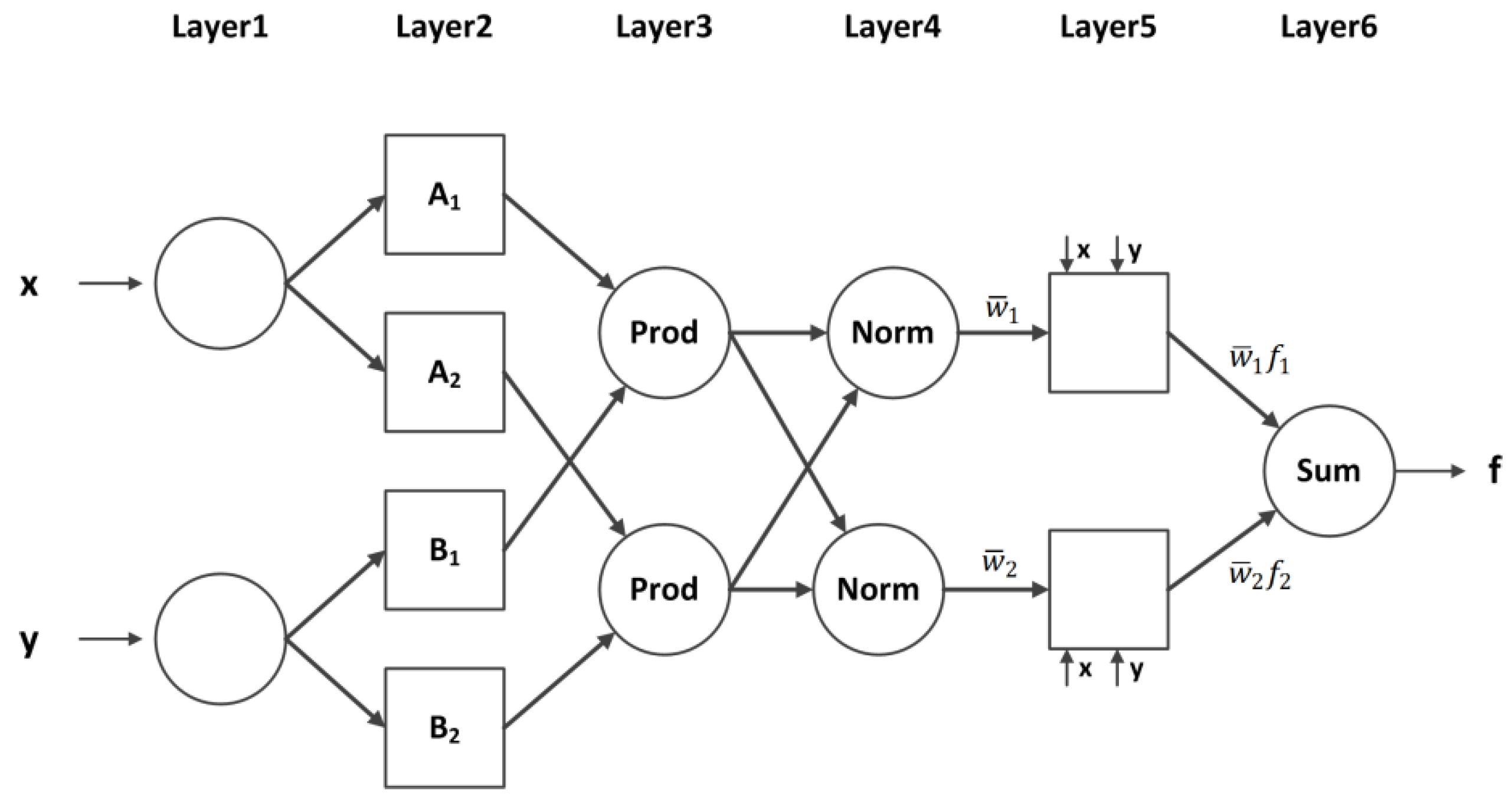
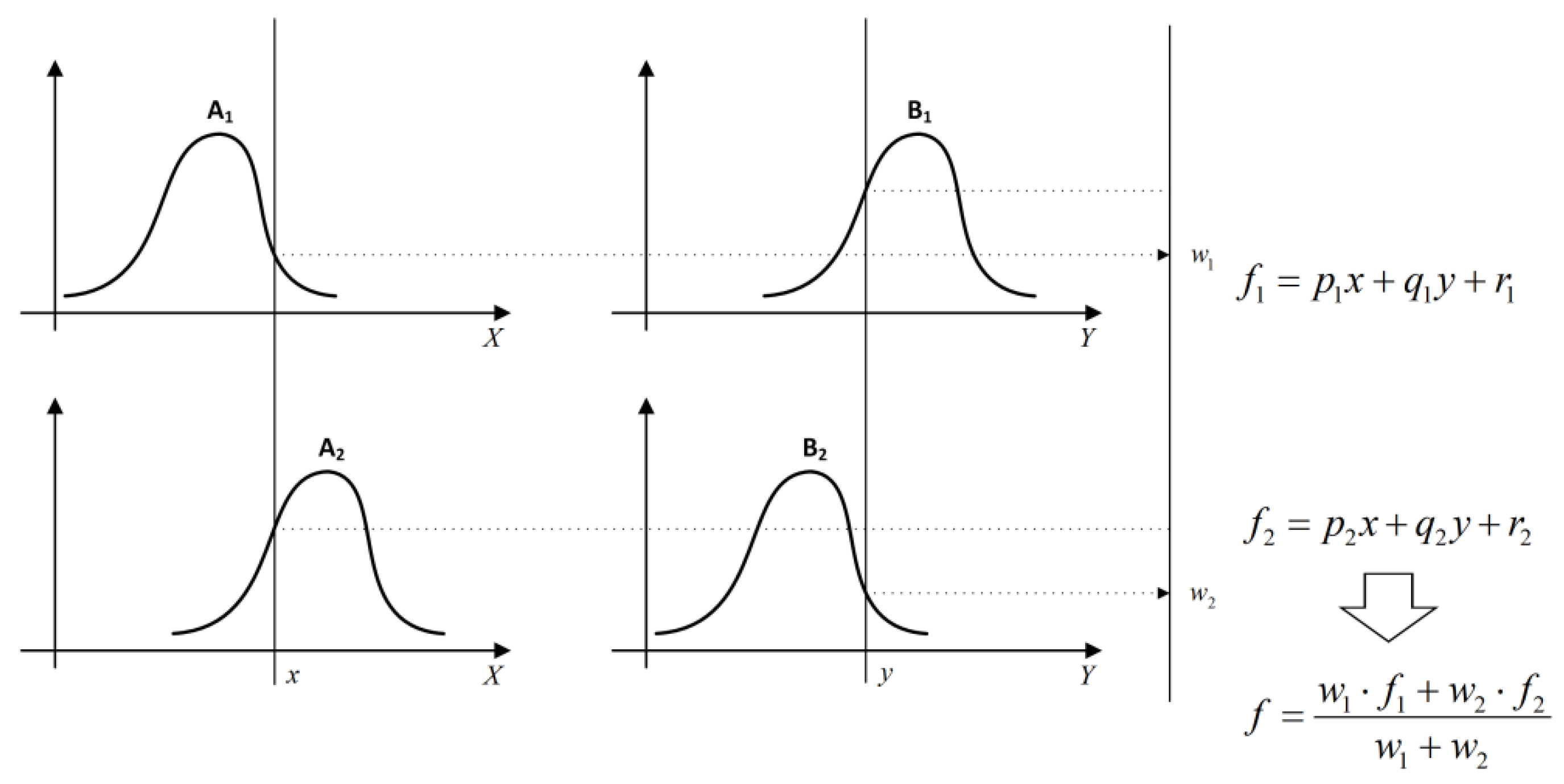
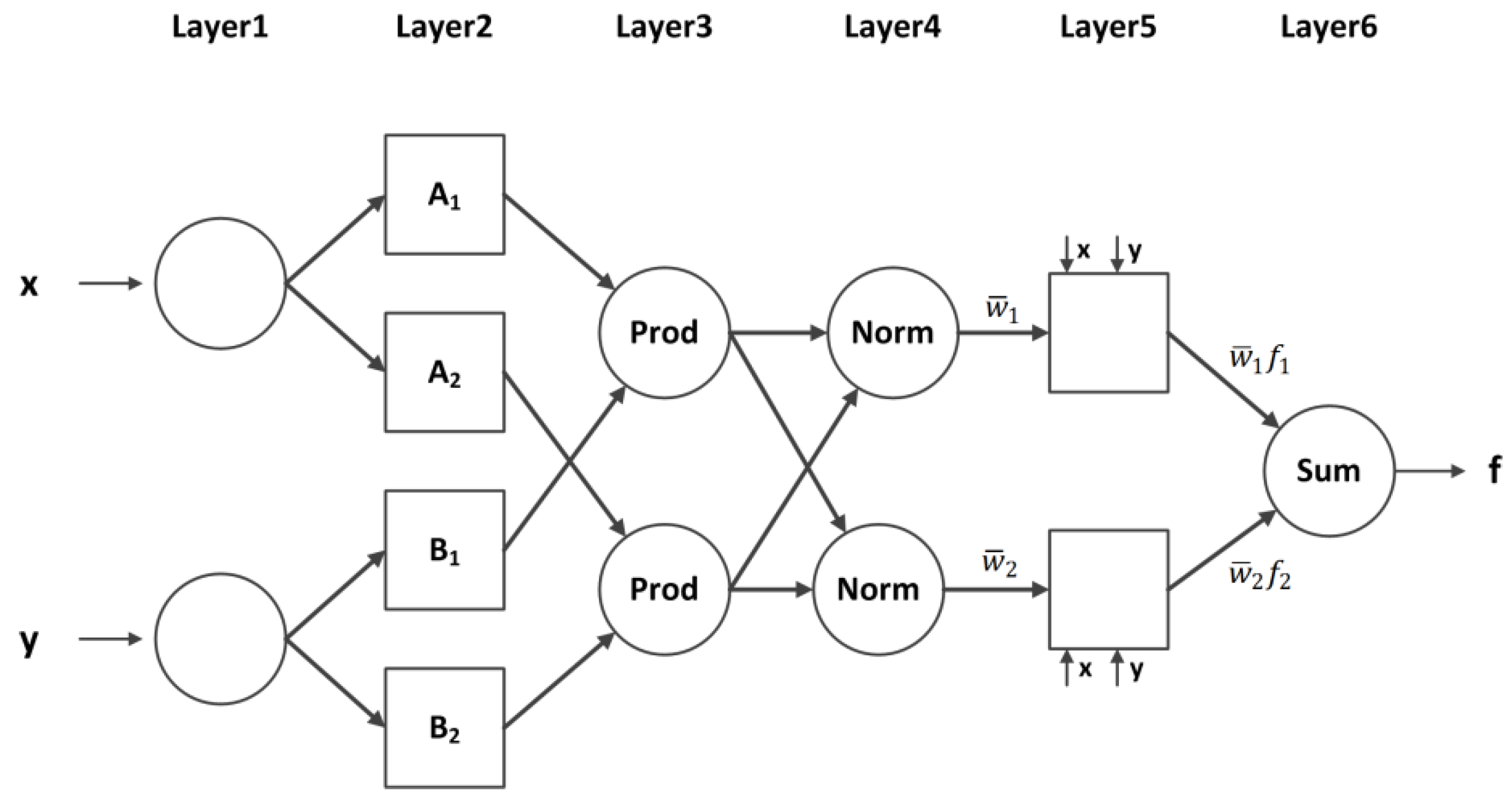
2.2. Adaptive Neuro-Fuzzy Inference System (ANFIS)
- Rule 1: If is and is , then
- Rule 2: If is and is , then
2.3. 1-D Flood Routing Hydrodynamic Model
2.4. 2-D Flood Inundation Model
2.5. Indices of Model Performance
3. Study Area and Data Selection
3.1. Study Aarea
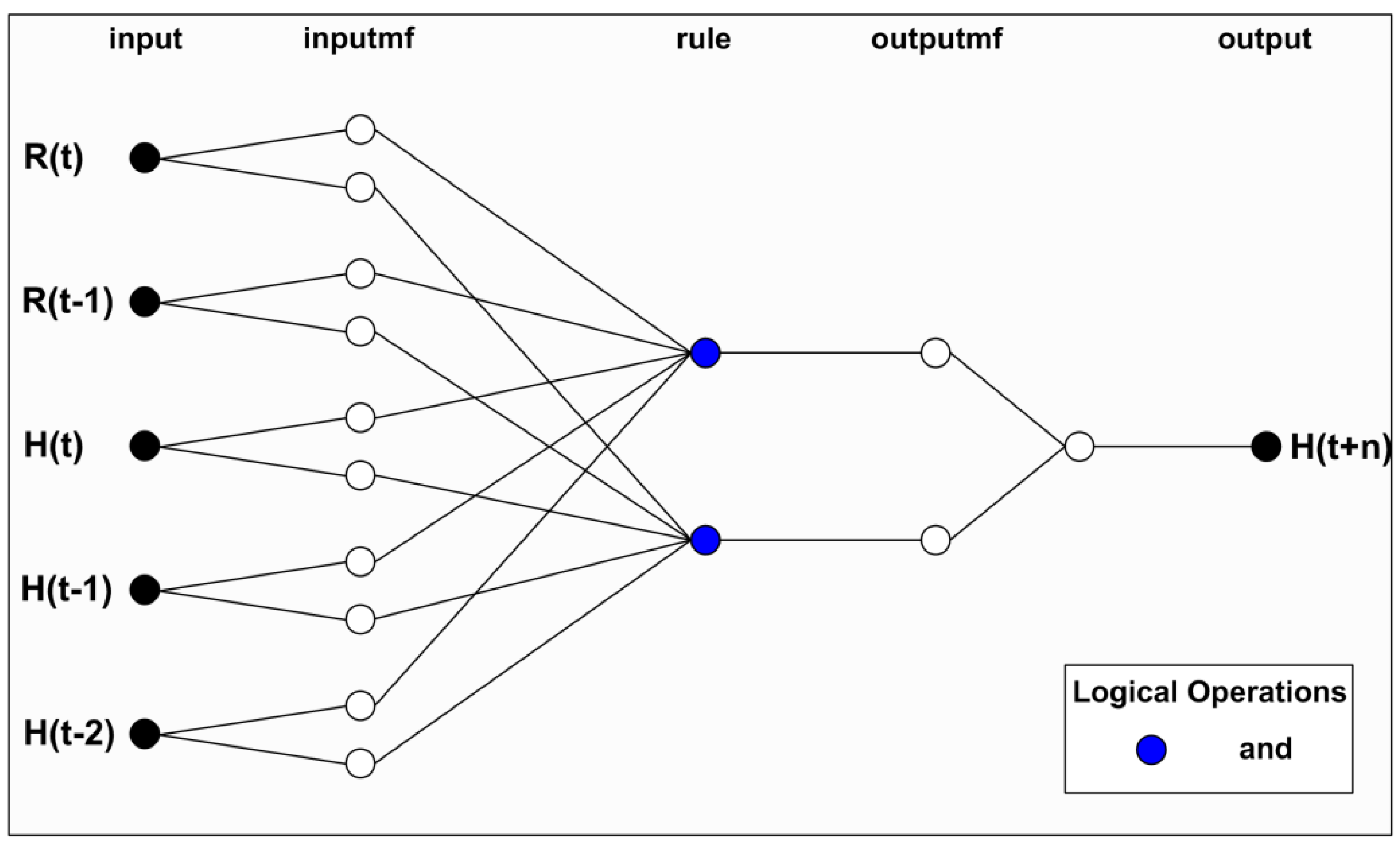
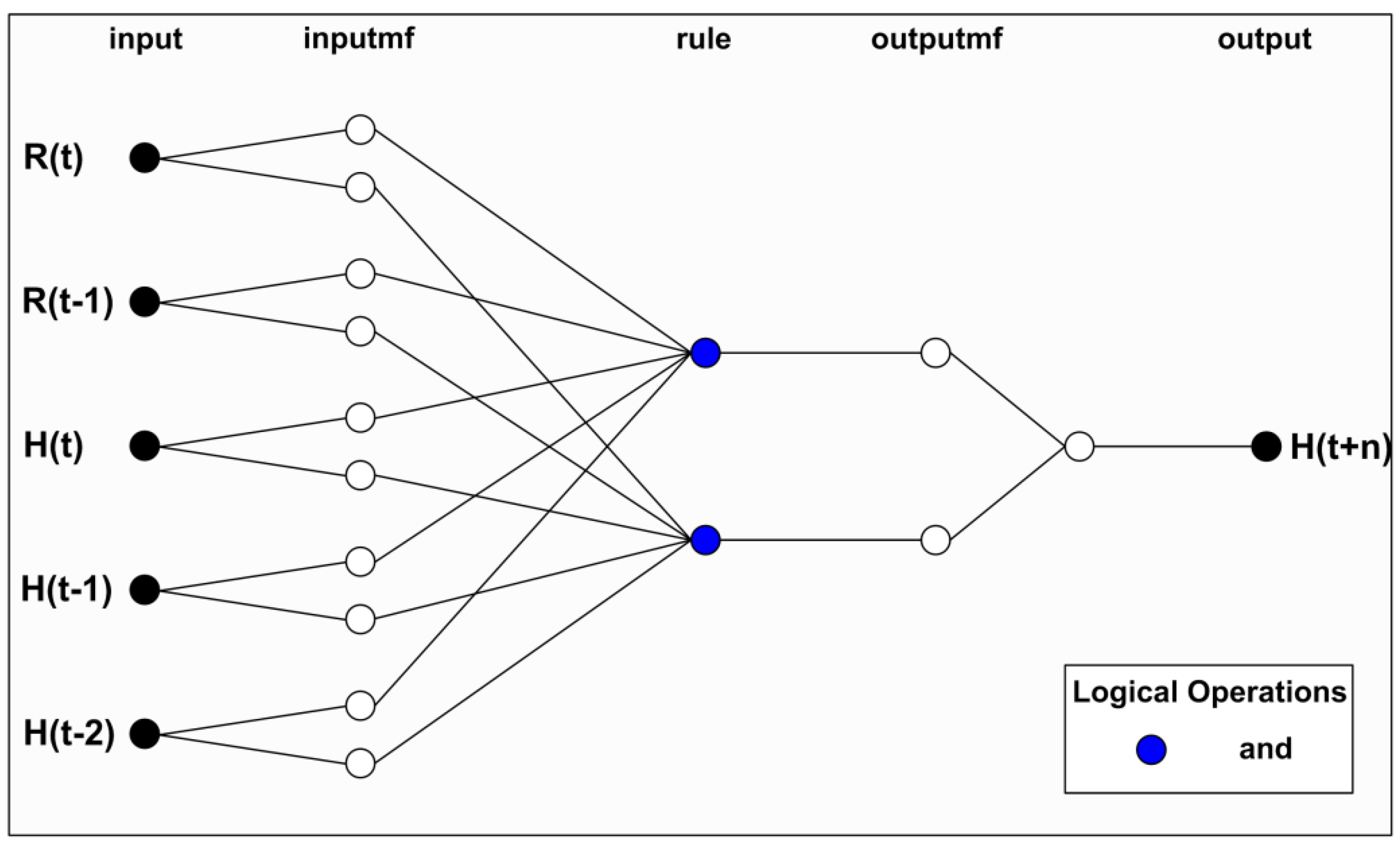
3.2. Input Vector Selection
3.2.1. Model Set-Up
3.2.2. Parameter Estimation of the Neuro-Fuzzy Model
4. Application
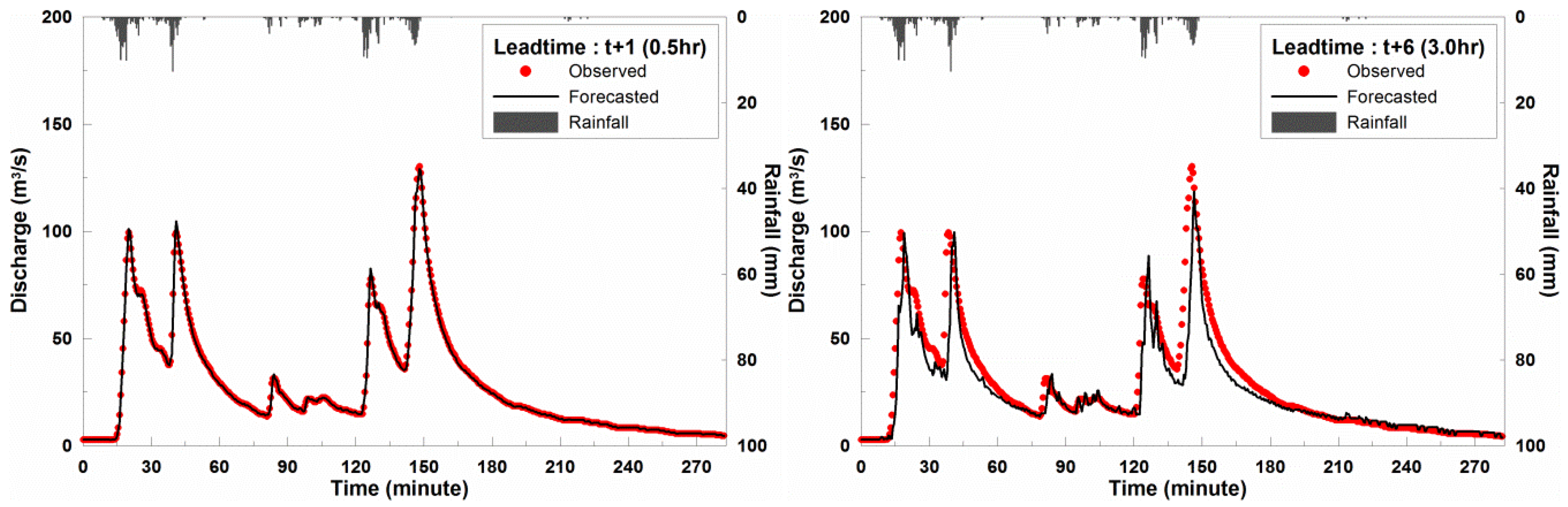
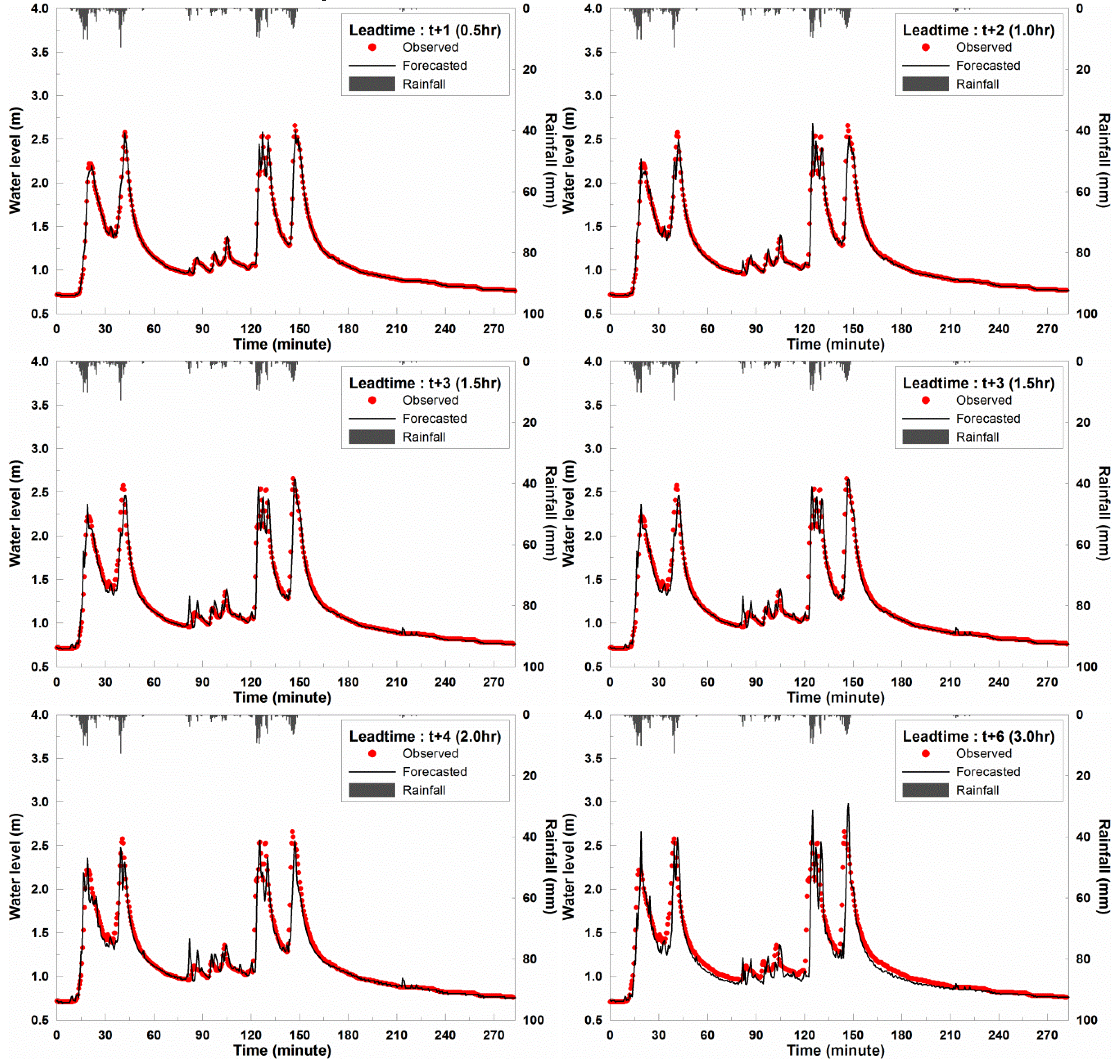
4.1. Real-Time Point Flood Forecasting
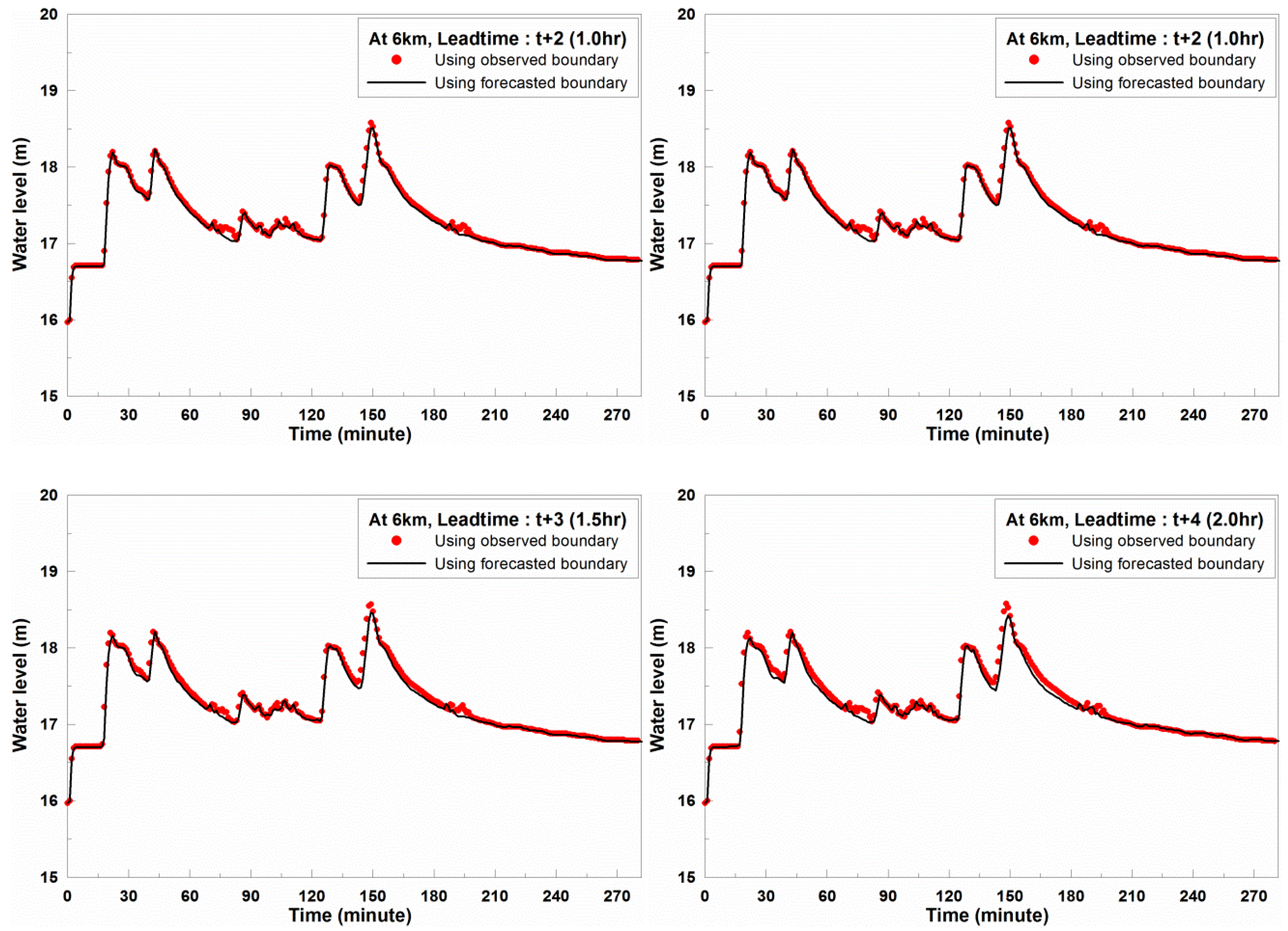
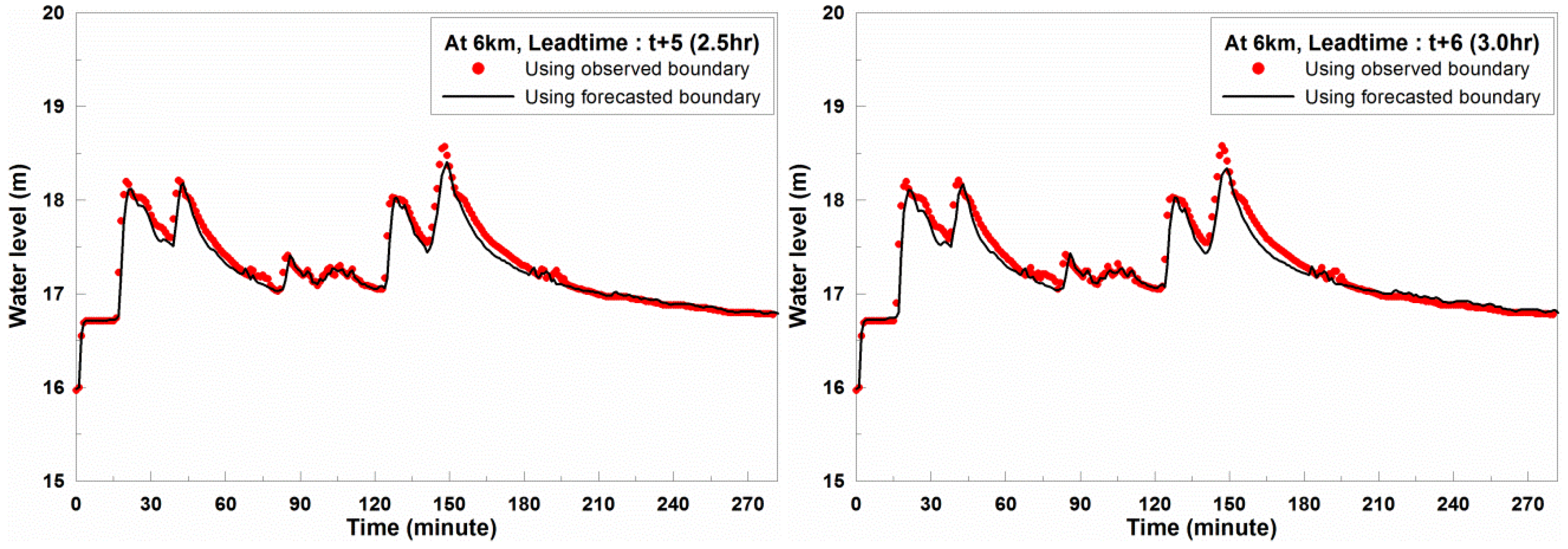
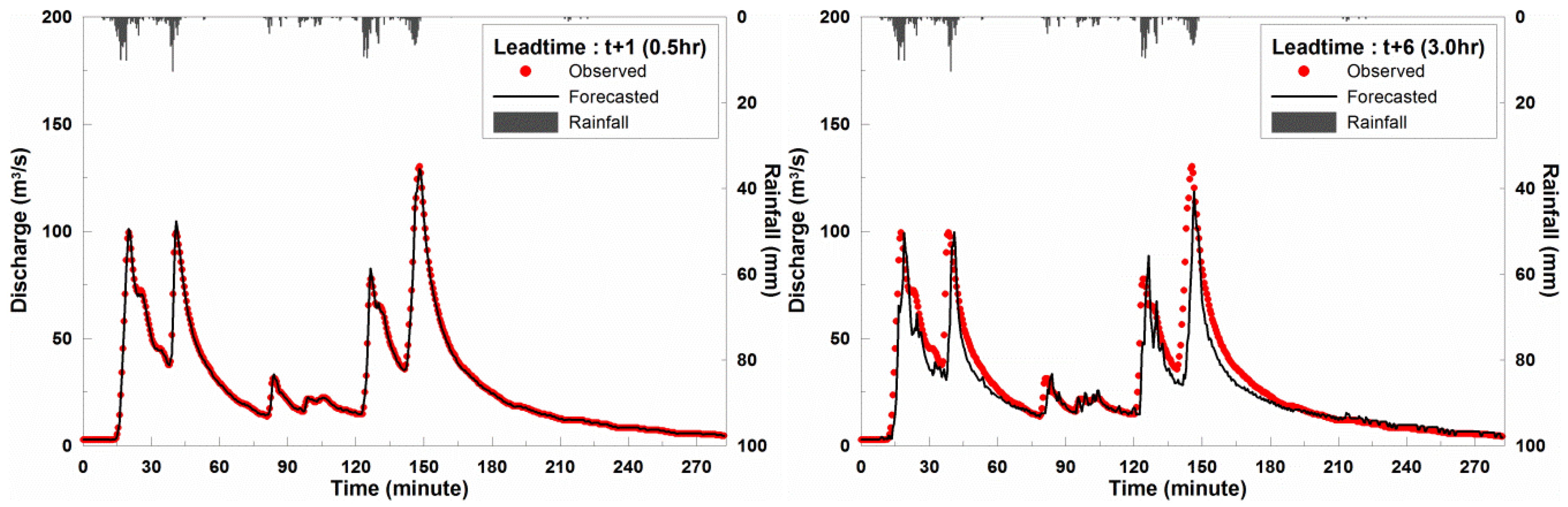
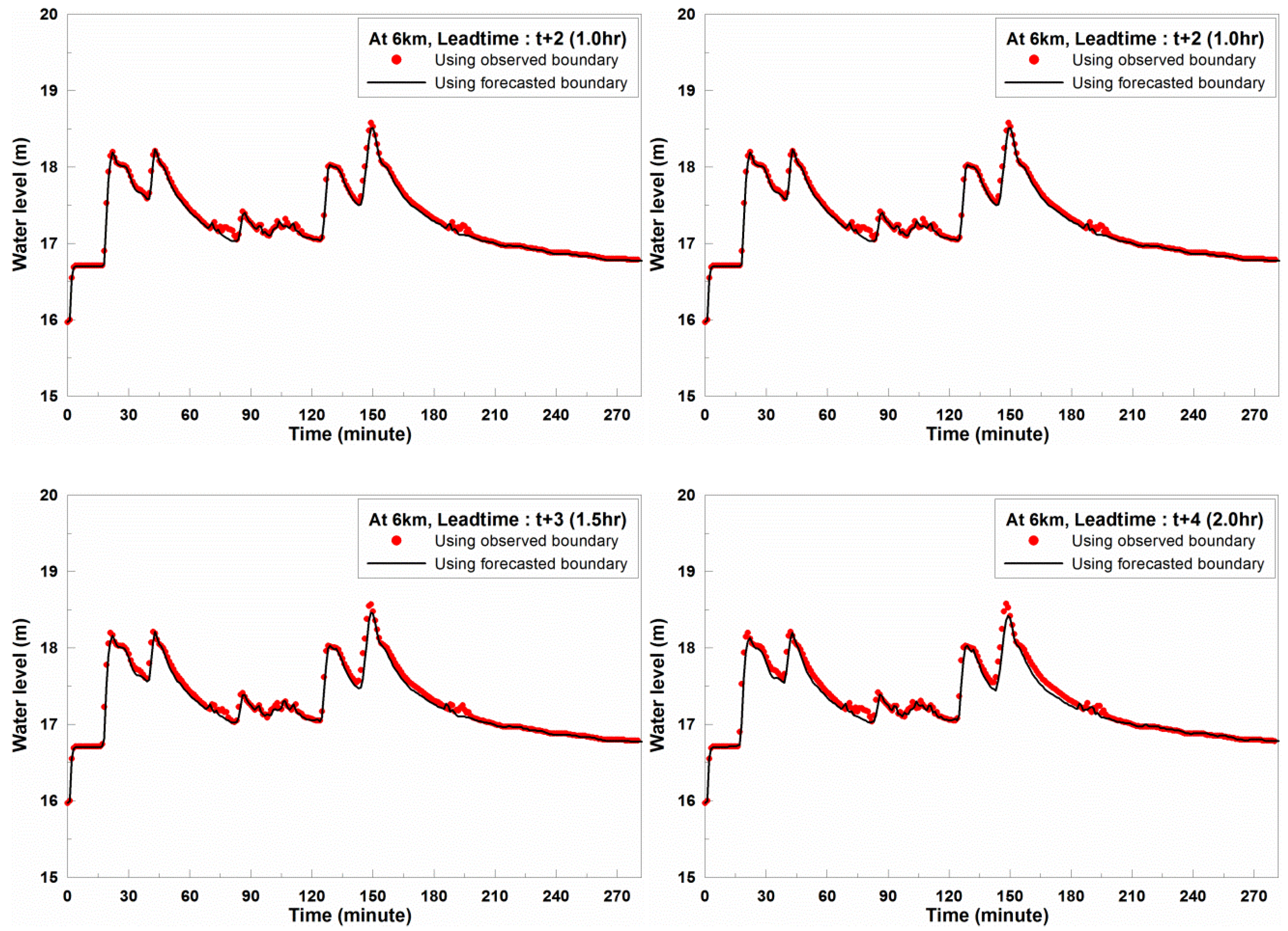
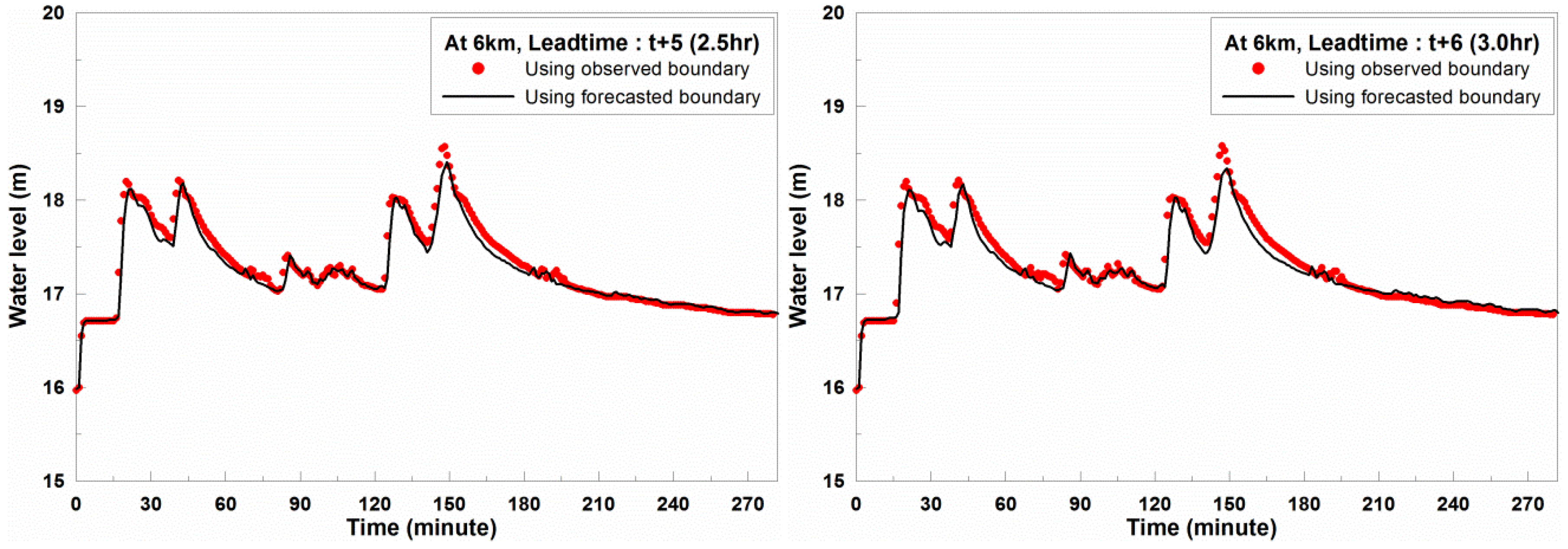
4.2. Real-Time Section Flood Forecasting
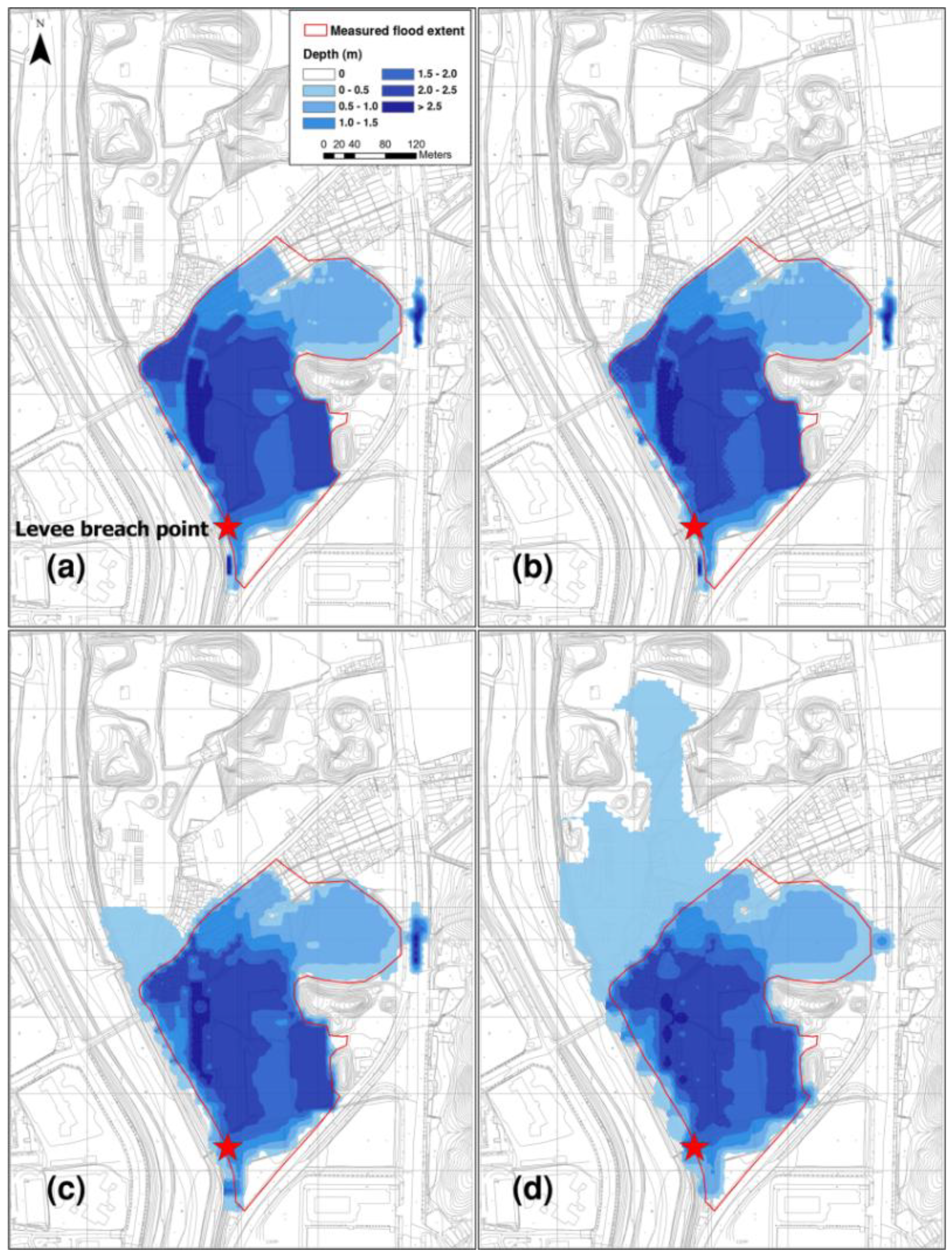
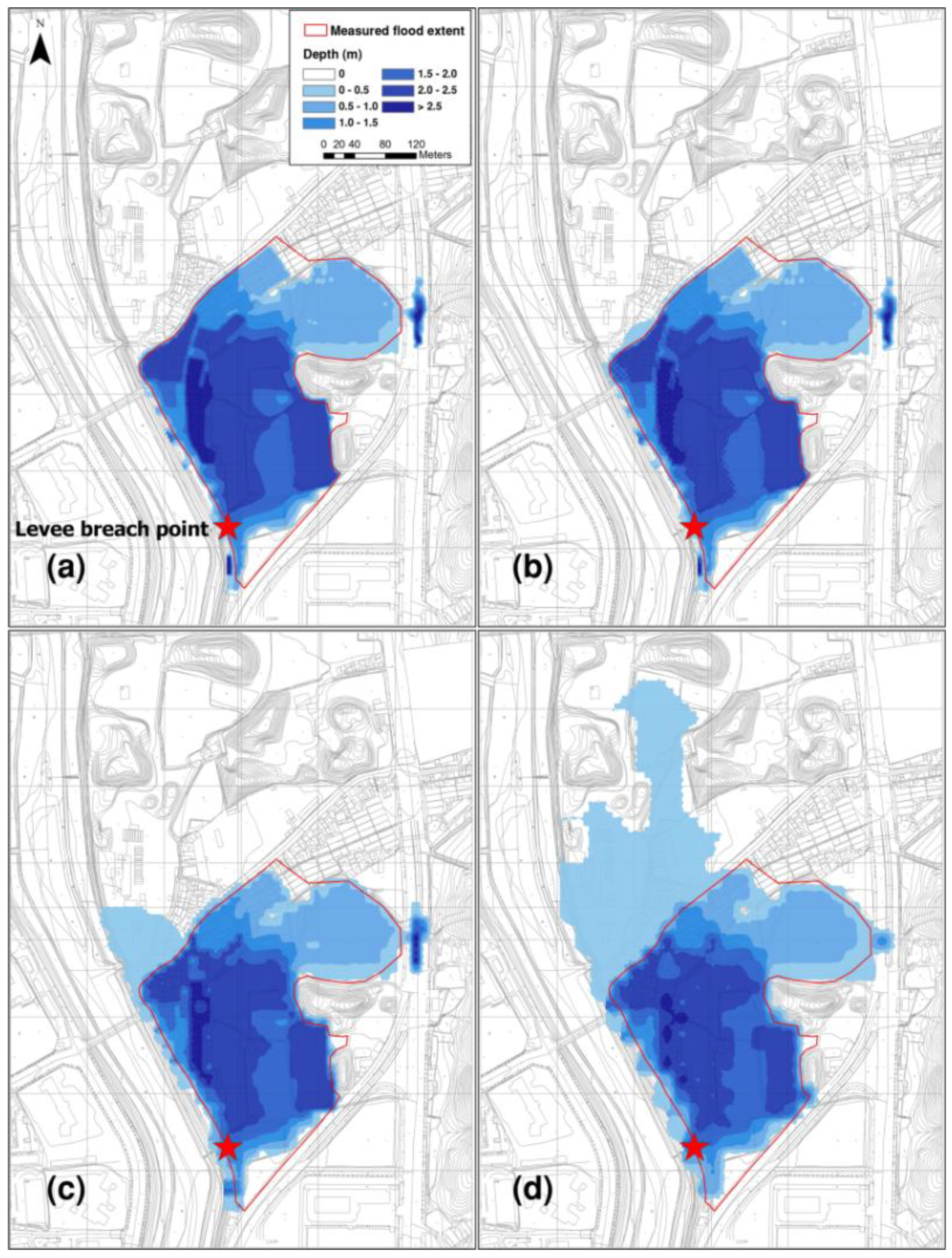
4.3. Real-Time Spatial Flood Inundation Analysis
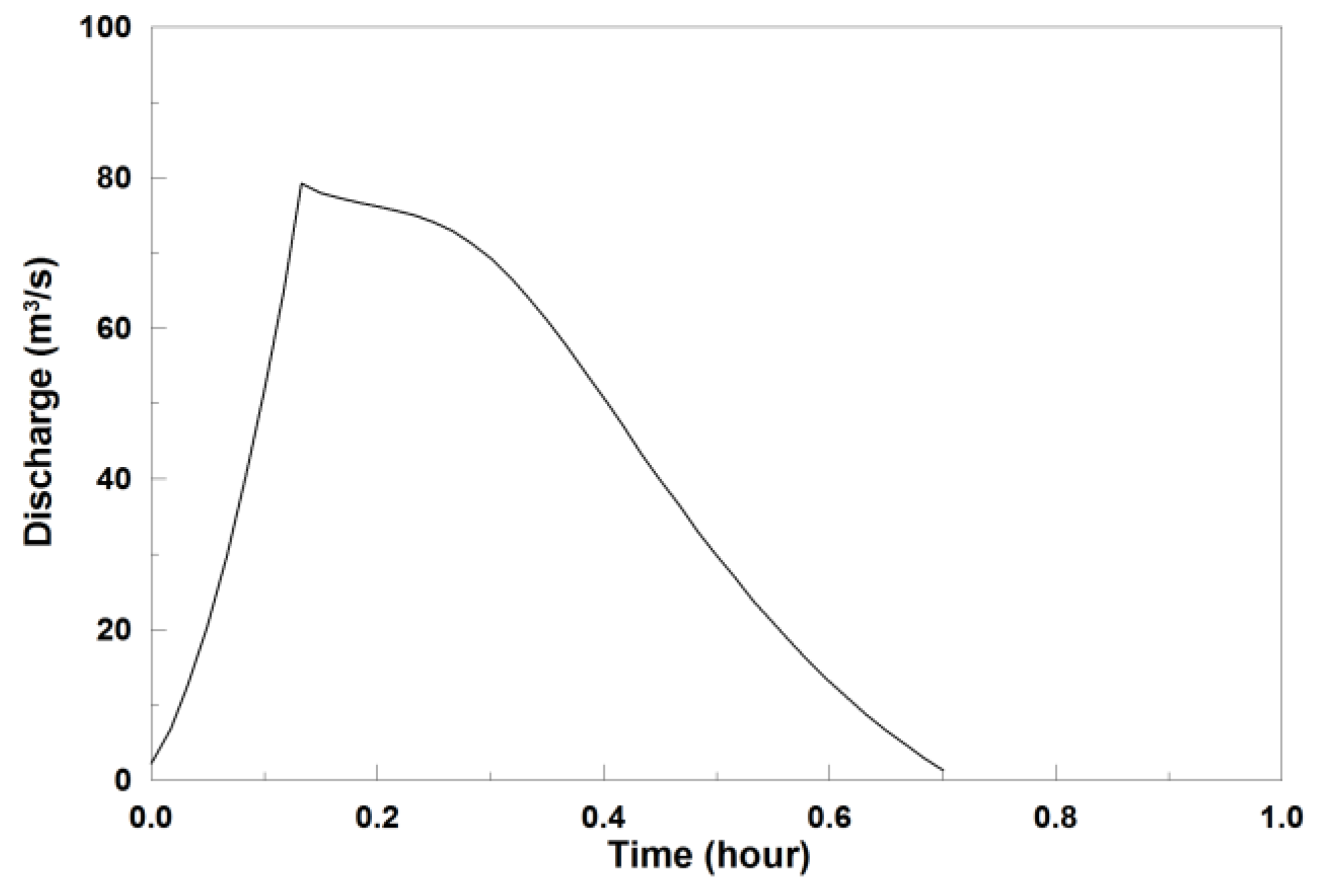
4.3.1. Establishing Input Data
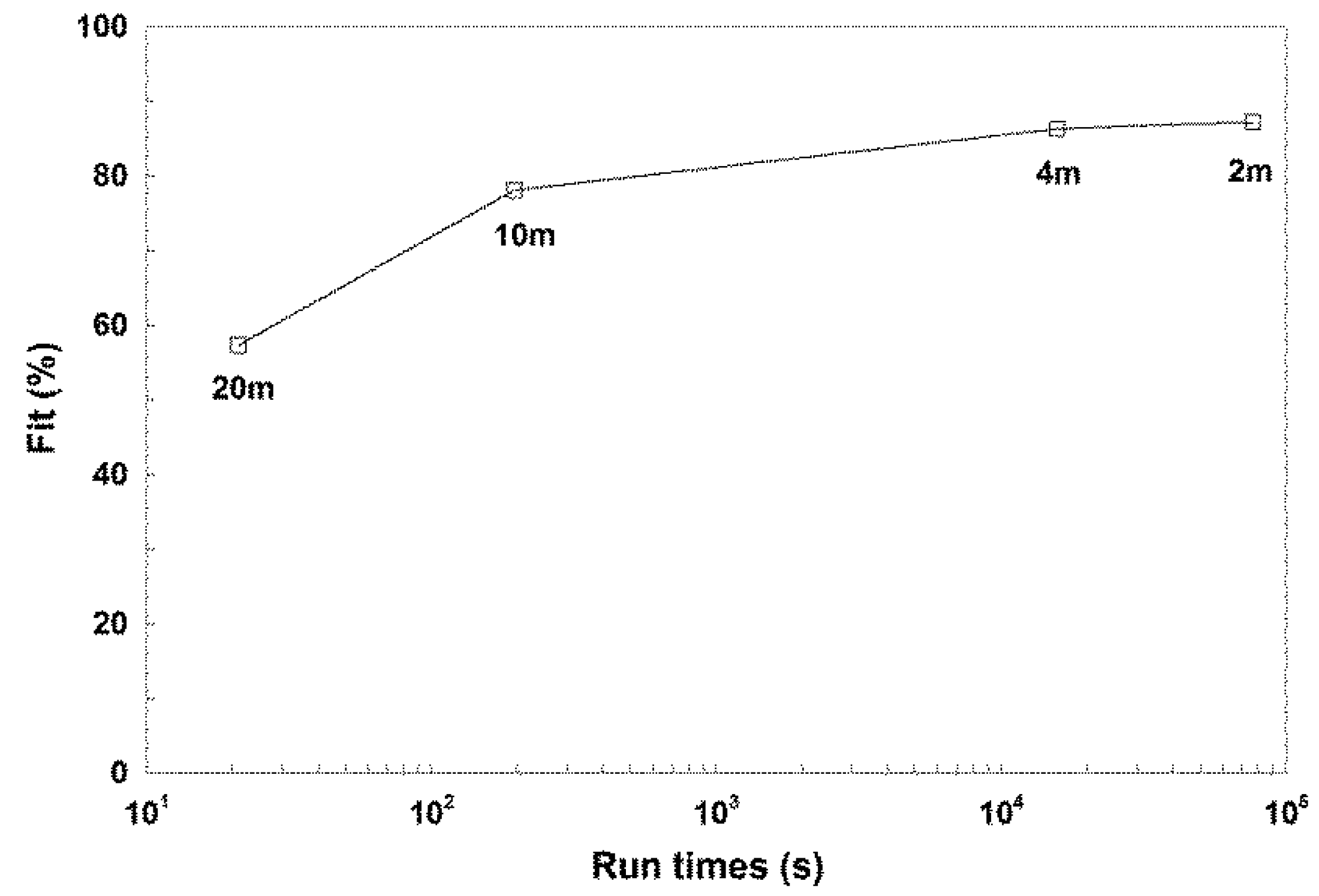
4.3.2. Real-Time 2-D Inundation Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chang, F.J.; Chen, Y.C. A counterpropagation fuzzy-neural network modeling approach to real time streamflow prediction. J. Hydrol. 2001, 245, 153–164. [Google Scholar] [CrossRef]
- Bazartseren, B.; Hildebrandt, G.; Holz, K.-P. Short-term water level prediction using neural networks and neuro-fuzzy approach. Neurocomputing 2003, 55, 439–450. [Google Scholar] [CrossRef]
- Kraijenhoff, D.A.; Moll, J.R. River Flow Modeling and Forecasting; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Rodríguez-Iturbe, I.; Valdés, J.B. The geomorphologic structure of hydrologic response. Water Resour. Res. 1979, 15, 1409–1420. [Google Scholar] [CrossRef]
- Ministry of Construction & Transportation (MCT). Improvement of Flood Forecasting Program for Major Streams; Ministry of Construction & Transportation: Seoul, Korea, 2005; pp. 1–195.
- Nguyen, P.K.T.; Chua, L.H.C.; Son, L.H. Flood forecasting in large rivers with data-driven models. Nat. Hazards 2014, 71, 767–784. [Google Scholar] [CrossRef]
- Khatibi, R.; Ghorbani, M.A.; Kashani, M.H.; Kisi, O. Comparison of three artificial intelligence techniques for discharge routing. J. Hydrol. 2011, 403, 201–212. [Google Scholar] [CrossRef]
- Hsu, K.; Gupta, H.V.; Sorooshian, S. Artificial neural network modelling of the rainfall-runoff process. Water Resour. Res. 1995, 31, 2517–2530. [Google Scholar] [CrossRef]
- Tokar, A.S.; Johnson, P.A. Rainfall-runoff modelling using artificial neural networks. J. Hydraul. Eng. 1999, 4, 232–239. [Google Scholar]
- Sudheer, K.P.; Gosain, A.K.; Ramasastri, K.S. A data-driven algorithm for constructing artificial neural network rainfall-runoff models. Hydrol. Processes 2002, 16, 1325–1330. [Google Scholar] [CrossRef]
- Jain, A.; Sudheer, K.P.; Srinivasulu, S. Identification of physical processes inherent in artificial neural network rainfall-runoff models. Hydrol. Processes 2004, 118, 571–581. [Google Scholar] [CrossRef]
- Chang, T.K.; Talei, A.; Chua, L.H.C.; Alaghmand, S. The Impact of Training Data Sequence on the Performance of Neuro-Fuzzy Rainfall-Runoff Models with Online Learning. Water 2019, 11, 592. [Google Scholar] [CrossRef]
- Taleia, A.; Chua, L.H.C.; Wong, T.S.W. Evaluation of rainfall and discharge inputs used by Adaptive Network-based Fuzzy Inference Systems (ANFIS) in rainfall-runoff modeling. J. Hydrol. 2010, 391, 248–262. [Google Scholar] [CrossRef]
- Hosseinia, S.M.; Mahjouri, N. Integrating Support Vector Regression and a geomorphologic Artificial Neural Network for daily rainfall-runoff modeling. Appl. Soft Comput. 2016, 38, 329–345. [Google Scholar] [CrossRef]
- Komasi, M.; Sharghi, S. Hybrid wavelet-support vector machine approach for modelling rainfall–runoff process. Water Sci. Technol. 2016, 73, 1937–1953. [Google Scholar] [CrossRef]
- Bartolettia, N.; Casaglia, F.; Marsili-Libellib, S.; Nardia, A.; Palandri, L. Data-driven rainfall/runoff modelling based on a neuro-fuzzy inference system. Environ. Modell. Softw. 2018, 106, 35–47. [Google Scholar] [CrossRef]
- Imrie, C.E.; Durucan, S.; Korre, A. River flow prediction using artificial neural networks: Generalisation beyond the calibration range. J. Hydrol. 2000, 233, 138–153. [Google Scholar] [CrossRef]
- Hu, T.S.; Lam, K.C.; Ng, S.T. River flow time series prediction with a range-dependent neural network. J. Hydrol. Sci. 2001, 46, 729–745. [Google Scholar] [CrossRef]
- Kumar, D.N.; Raju, K.S.; Sathish, T. River flow forecasting using recurrent neural networks. Water Resour. Manag. 2004, 18, 143–161. [Google Scholar] [CrossRef]
- Yarar, M.; Onucyildiz, M.; Copty, N.K. Modelling level change in lakes using neuro fuzzy and artificial neural networks. J. Hydrol. 2009, 365, 329–334. [Google Scholar] [CrossRef]
- He, Z.; Wen, X.; Liu, H. A comparative study of artificial neural network, adaptive neuro fuzzy inference system and support vector machine for forecasting river flow in the semiarid mountain region. J. Hydrol. 2014, 509, 379–386. [Google Scholar] [CrossRef]
- Nguyen, P.K.T.; Chua, L.H.C.; Talei, A.; Chai, Q.H. Water level forecasting using neuro-fuzzy models with local learning. Neural Comput. Appl. 2018, 30, 1877–1887. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, Q.; Singh, V.P.; Shi, P. River flow modelling: Comparison of performance and evaluation of uncertainty using data-driven models and conceptual hydrological model. Stoch. Environ. Res. Risk Assess. 2018, 32, 2667–2682. [Google Scholar] [CrossRef]
- Luk, K.C.; Ball, J.E.; Sharma, A. An application of artificial neural networks for rainfall forecasting. Math. Comput. Model. 2001, 33, 683–693. [Google Scholar] [CrossRef]
- Ramirez, M.C.P.; Velho, H.F.C.; Ferreira, N.J. Artificial neural network technique for rainfall forecasting applied to the Sao Paulo region. J. Hydrol. 2005, 301, 146–162. [Google Scholar] [CrossRef]
- Mekanik, F.; Imteaz, M.A.; Talei, A. Seasonal rainfall forecasting by adaptive network-based fuzzy inference system (ANFIS) using large scale climate signal. Clim. Dyn. 2016, 46, 3097–3111. [Google Scholar] [CrossRef]
- Pham, Q.B.; Yang, T.-C.; Kuo, C.-M.; Tseng, H.-W.; Yu, P.-S. Combing Random Forest and Least Square Support Vector Regression for Improving Extreme Rainfall Downscaling. Water 2019, 11, 451. [Google Scholar] [CrossRef]
- Han, Y.; Zou, Z.; Wang, H. Adaptive neuro fuzzy inference system for classification of water quality status. J. Environ. Sci. 2010, 22, 1891–1896. [Google Scholar] [CrossRef]
- Khaki, M.; Yusoff, I.; Islami, N. Application of the Artificial Neural Network and Neuro-fuzzy System for Assessment of Groundwater Quality. Clean-Soil Air Water 2015, 43, 551–560. [Google Scholar] [CrossRef]
- Yaseen, Z.M.; Ramal, M.M.; Diop, L.; Othman Jaafar, O.; Demir, V.; Kisi, O. Hybrid Adaptive Neuro-Fuzzy Models for Water Quality Index Estimation. Water Resour. Manag. 2018, 32, 2227–2245. [Google Scholar] [CrossRef]
- Jang, J.S. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Takagi, T.; Sugeno, M. Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Syst. Man Cybern. 1985, 15, 387–403. [Google Scholar] [CrossRef]
- Al-Hmouz, A.; Shen, J.; Al-Hmouz, R. Modeling and simulation of an adaptive neuro-fuzzy inference system (ANFIS) for mobile learning. IEEE Trans. Learn. Technol. 2012, 5, 226–237. [Google Scholar] [CrossRef]
- Jang, J.S.R.; Sun, C.T.; Mizutani, E. Neuro-Fuzzy and Soft Computing: A Computational Approach to Learning and Machine Intelligence; Prentice Hall: Upper Saddle River, NJ, USA, 1997. [Google Scholar]
- Fread, D.L.; Lewis, J.M. NWS FLDWAV Model; Hydrologic Research Laboratory Office of Hydrology, National Weather Service; NOAA: Silver Spring, MD, USA, 1998. [Google Scholar]
- Chow, V.T.; Maidment, D.R.; Mays, L.W. Applied Hydrology; McGRAW-HILL International Editions: New York, NY, USA, 1988. [Google Scholar]
- Kim, B.; Kim, T.H.; Kim, J.H.; Han, K.Y. A well-balanced unsplit finite volume model with geometric flexibility. J. Vibioeng. 2014, 16, 1574–1589. [Google Scholar]
- Son, A.L.; Kim, B.; Han, K.Y. A simple and robust method for simultaneous consideration of overland and underground space in urban flood modeling. Water 2016, 8, 494. [Google Scholar] [CrossRef]
- Kim, T.H.; Kim, B.; Han, K.Y. Application of Fuzzy TOPSIS to Flood Hazard Mapping for Levee Failure. Water 2019, 11, 592. [Google Scholar] [CrossRef]
- Kar, A.K.; Goel, N.K.; Lohani, A.K.; Roy, G.P. Application of clustering techniques using prioritized variables in regional flood frequency analysis—Case study of Mahanadi Basin. J. Hydrol. Eng. 2012, 317, 213–223. [Google Scholar] [CrossRef]
- K-Water. (Flood Map Fundamental Investigation) Flood Inundation History Report; K-Water: Daejeon, Korea, 2005; pp. 1–83. [Google Scholar]
- Bates, P.D.; Dawson, R.J.; Hall, J.W.; Horritt, M.S.; Nicholls, R.J.; Wicks, J.; Hassan, M.A.A.M. Simplified two-dimensional numerical modelling of coastal flooding and example applications. Coast. Eng. 2005, 52, 793–810. [Google Scholar] [CrossRef]
- Wadey, M.P.; Nicholls, R.J.; Hutton, C. Coastal flooding in the Solent: An integrated analysis of defences and inundation. Water 2012, 4, 430–459. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification | Traditional Method | This Study | |
|---|---|---|---|
| Focused on | Large river Small–medium stream | Small–medium stream | |
| Model | Hydrological | Physical model (Rainfall-Runoff) | Data-driven model (Neuro-fuzzy) |
| Hydrodynamic | 1-D river model 2-D inundation model | 1-D river model (FLDWAV) 2-D inundation model (FVM) | |
| Flood forecast | Point flood forecasting | Real-time point and section flood forecasting | |
| Inundation | Inundation analysis | Real-time inundation analysis | |
| Event | Start Time | Duration (h) | Total Rainfall (mm) | Cause | Process |
|---|---|---|---|---|---|
| J-1 | 29 Apr. 2002 08:00 | 32.0 | 81.1 | Low pressure | Testing |
| J-2 | 5 Jul. 2002 09:30 | 38.5 | 94.7 | Typhoon | Testing |
| J-3 | 4 Aug. 2002 07:00 | 88.0 | 361.3 | Low pressure | Input vector selection |
| J-4 | 5 Jun. 2003 14:00 | 32.0 | 96.4 | Low pressure | Training |
| J-5 | 21 Jul. 2003 19:00 | 37.0 | 192.1 | Seasonal rain front | Testing |
| J-6 | 6 Aug. 2003 11:00 | 20.5 | 65.9 | Low pressure | Testing |
| J-7 | 19 Aug. 2003 14:00 | 23.0 | 149.8 | Low pressure | Testing |
| J-8 | 23 Aug. 2003 04:30 | 122.5 | 319.8 | Low pressure | Checking |
| J-9 | 18 Sept. 2003 04:00 | 20.0 | 142.4 | Low pressure | Testing |
| J-10 | 3 Jul. 2004 18:30 | 40.0 | 83.7 | Low pressure | Testing |
| J-11 | 11 Jul. 2004 18:30 | 36.5 | 138.9 | Low pressure | Testing |
| J-12 | 26 Jun. 2005 17:00 | 25.5 | 136.3 | Low pressure | Testing |
| J-13 | 1 Jul. 2005 00:30 | 62.5 | 118.3 | Seasonal rain front | Testing |
| J-14 | 28 Jul. 2005 00:30 | 17.5 | 122.9 | Low pressure | Input vector selection |
| J-15 | 10 Aug. 2005 09:00 | 49.0 | 112.9 | Low pressure | Testing |
| J-16 | 24 Aug. 2005 21:00 | 23.0 | 83.0 | Low pressure | Testing |
| J-17 | 13 Sept. 2005 05:30 | 18.0 | 95.6 | Low pressure | Testing |
| Model | Combination Code | Input Variable | |
|---|---|---|---|
| Rainfall | Water Level | ||
| M-1 | H01234 | - | H(t), H(t-1), H(t-2), H(t-3), H(t-4) |
| M-2 | R0_H0123 | R(t) | H(t), H(t-1), H(t-2), H(t-3) |
| M-3 | R01_H012 | R(t), R(t-1) | H(t), H(t-1), H(t-2) |
| M-4 | R012_H01 | R(t), R(t-1), R(t-2) | H(t), H(t-1) |
| M-5 | R0123_H0 | R(t), R(t-1), R(t-2), R(t-3) | H(t) |
| M-6 | R01234 | R(t), R(t-1), R(t-2), R(t-3), R(t-4) | - |
| Event | Model | Model Performance Index | |||
|---|---|---|---|---|---|
| RMSE (cm) | CC | NSEC | RPE | ||
| J-3 | M-1 | 1.32 | 1.00 | 0.99 | 2.42 |
| M-2 | 2.33 | 1.00 | 0.98 | 2.87 | |
| M-3 | 0.76 | 1.00 | 1.00 | 1.45 | |
| M-4 | 1.48 | 1.00 | 0.99 | 2.63 | |
| M-5 | 1.94 | 1.00 | 0.99 | 1.78 | |
| M-6 | 56.47 | −0.26 | −9.60 | 65.83 | |
| J-14 | M-1 | 8.44 | 0.99 | 0.98 | 3.36 |
| M-2 | 6.8 | 0.99 | 0.99 | 4.22 | |
| M-3 | 4.97 | 1.00 | 0.99 | 0.58 | |
| M-4 | 7.33 | 0.99 | 0.99 | 3.46 | |
| M-5 | 9.08 | 0.99 | 0.98 | 11.22 | |
| M-6 | 77.85 | −0.06 | −0.39 | 1.71 | |
| Process | Gauge Station | RMSE (Jungrang: m, Shingok: m3/s) | NSEC | ||||||||||
| t+1 (0.5 h) | t+2 (1.0 h) | t+3 (1.5 h) | t+4 (2.0 h) | t+5 (2.5 h) | t+6 (3.0 h) | t+1 (0.5 h) | t+2 (1.0 h) | t+3 (1.5 h) | t+4 (2.0 h) | t+5 (2.5 h) | t+6 (3.0 h) | ||
| Training | Jungrang | 0.01 | 0.02 | 0.03 | 0.04 | 0.06 | 0.09 | 1.00 | 1.00 | 0.99 | 0.99 | 0.98 | 0.94 |
| Shingok | 0.26 | 0.47 | 0.73 | 1.11 | 1.56 | 2.03 | 1.00 | 1.00 | 1.00 | 0.99 | 0.99 | 0.98 | |
| Checking | Jungrang | 0.06 | 0.12 | 0.17 | 0.19 | 0.22 | 0.27 | 0.99 | 0.96 | 0.93 | 0.90 | 0.87 | 0.81 |
| Shingok | 2.03 | 2.81 | 4.33 | 6.25 | 8.70 | 11.53 | 1.00 | 0.99 | 0.98 | 0.96 | 0.92 | 0.85 | |
| Testing | Jungrang | 0.04 | 0.07 | 0.11 | 0.13 | 0.16 | 0.20 | 0.99 | 0.97 | 0.94 | 0.89 | 0.84 | 0.77 |
| Shingok | 2.17 | 3.78 | 5.42 | 6.97 | 8.38 | 9.84 | 0.99 | 0.97 | 0.94 | 0.90 | 0.86 | 0.80 | |
| Process | Gauge Station | CC | RPE (%) | ||||||||||
| t+1 (0.5 h) | t+2 (1.0 h) | t+3 (1.5 h) | t+4 (2.0 h) | t+5 (2.5 h) | t+6 (3.0 h) | t+1 (0.5 h) | t+2 (1.0 h) | t+3 (1.5 h) | t+4 (2.0 h) | t+5 (2.5 h) | t+6 (3.0 h) | ||
| Training | Jungrang | 1.00 | 1.00 | 1.00 | 0.99 | 0.99 | 0.97 | 0.21 | 0.24 | 0.01 | 0.68 | 0.50 | 6.66 |
| Shingok | 1.00 | 1.00 | 1.00 | 1.00 | 0.99 | 0.99 | 0.13 | 0.17 | 1.33 | 1.94 | 3.15 | 4.36 | |
| Checking | Jungrang | 1.00 | 0.98 | 0.96 | 0.96 | 0.94 | 0.91 | 0.60 | 4.41 | 5.86 | 6.24 | 5.29 | 5.96 |
| Shingok | 1.00 | 1.00 | 0.99 | 0.98 | 0.96 | 0.93 | 0.98 | 2.62 | 1.01 | 1.99 | 2.79 | 3.66 | |
| Testing | Jungrang | 1.00 | 0.99 | 0.97 | 0.95 | 0.92 | 0.89 | 1.43 | 3.46 | 3.84 | 5.23 | 8.25 | 9.98 |
| Shingok | 1.00 | 0.99 | 0.97 | 0.96 | 0.94 | 0.91 | 1.52 | 2.67 | 3.14 | 4.41 | 6.50 | 9.73 | |
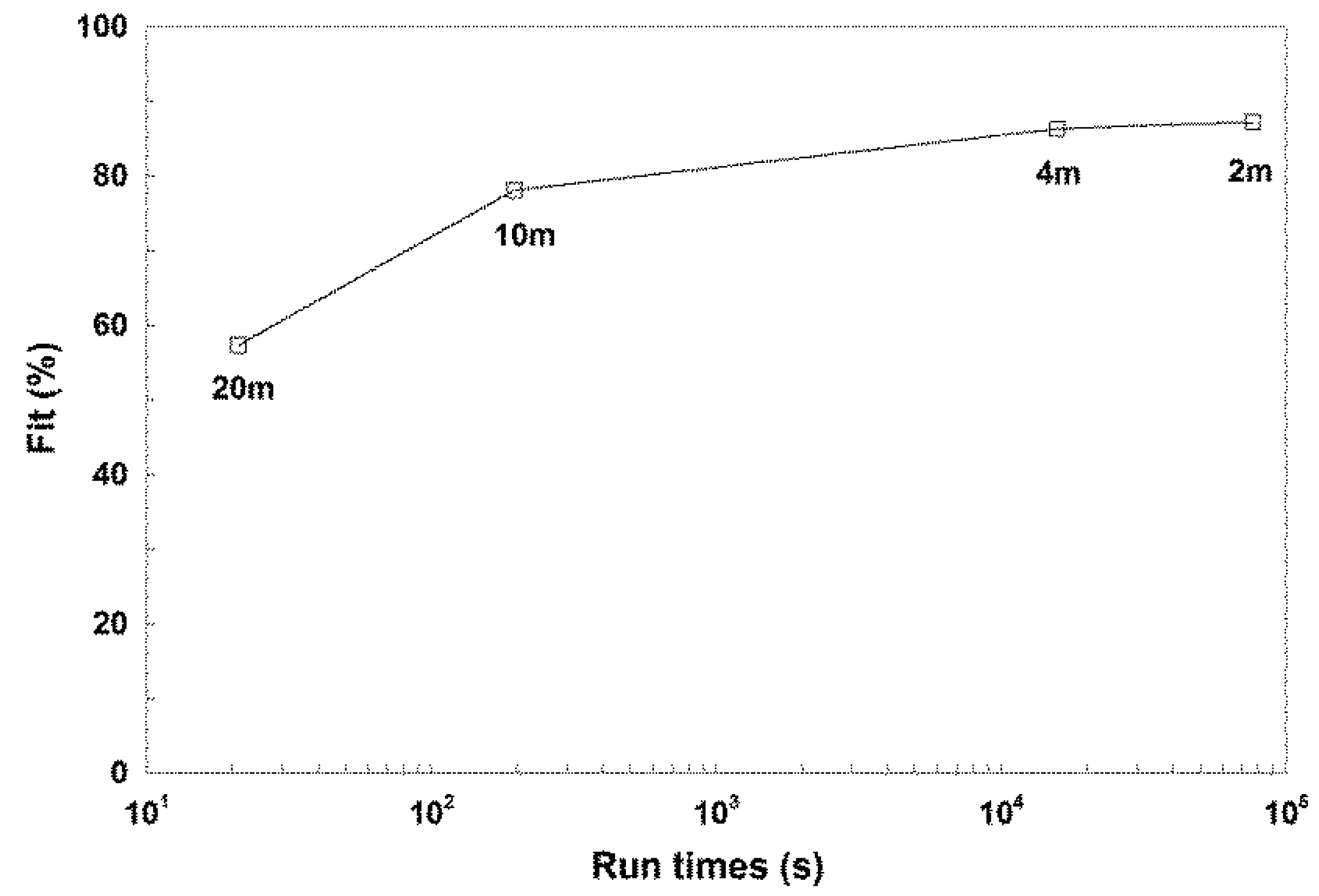
| Grid Resolution (m) | Fit (%) | Flood Depth (m) | Flooded Area (km2) | Run Time (second) | |||
|---|---|---|---|---|---|---|---|
| Max. | Mean | ||||||
| 2 | 6.45 | 6.32 | 87.23 | 3.17 | 2.97 | 2.97 | 76,365 |
| 4 | 6.05 | 7.66 | 86.29 | 3.09 | 2.89 | 2.89 | 15,707 |
| 10 | 5.10 | 16.86 | 78.03 | 2.89 | 2.68 | 2.68 | 195 |
| 20 | 2.97 | 39.72 | 57.31 | 2.81 | 2.51 | 2.51 | 21 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, B.; Choi, S.Y.; Han, K.-Y. Integrated Real-Time Flood Forecasting and Inundation Analysis in Small–Medium Streams. Water 2019, 11, 919. https://doi.org/10.3390/w11050919
Kim B, Choi SY, Han K-Y. Integrated Real-Time Flood Forecasting and Inundation Analysis in Small–Medium Streams. Water. 2019; 11(5):919. https://doi.org/10.3390/w11050919
Chicago/Turabian StyleKim, Byunghyun, Seng Yong Choi, and Kun-Yeun Han. 2019. "Integrated Real-Time Flood Forecasting and Inundation Analysis in Small–Medium Streams" Water 11, no. 5: 919. https://doi.org/10.3390/w11050919
APA StyleKim, B., Choi, S. Y., & Han, K.-Y. (2019). Integrated Real-Time Flood Forecasting and Inundation Analysis in Small–Medium Streams. Water, 11(5), 919. https://doi.org/10.3390/w11050919