Remote Image Capture System to Improve Aerial Supervision for Precision Irrigation in Agriculture


 ,
,  and
and 
Abstract
:1. Introduction
1.1. Limitations of UAVs in Precision Agriculture Applications
1.2. Wireless Sensor Networks in Agriculture and Food Industry
1.3. ZigBee Wireless Protocol for Precision Agriculture
2. Materials and Methods
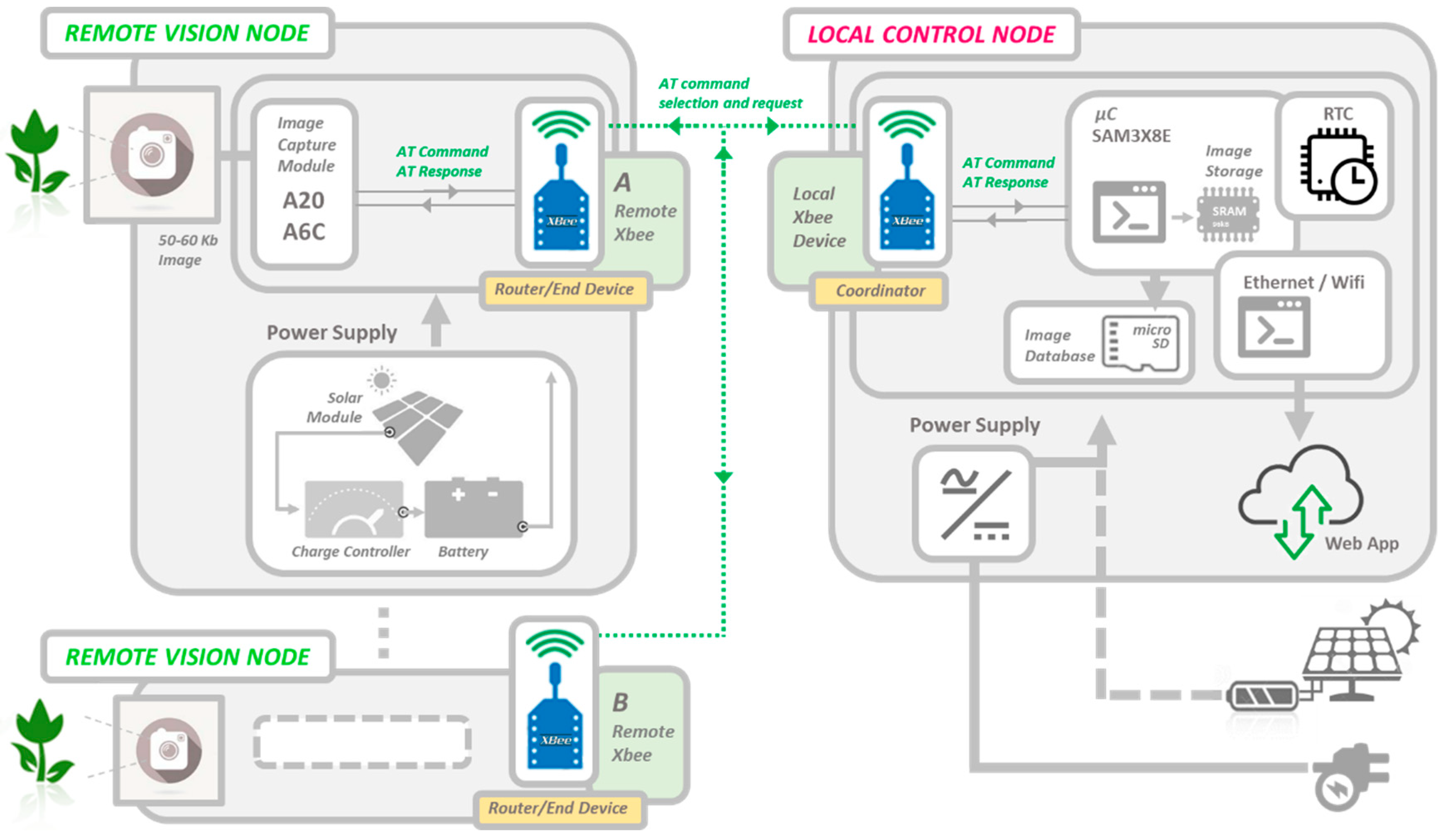
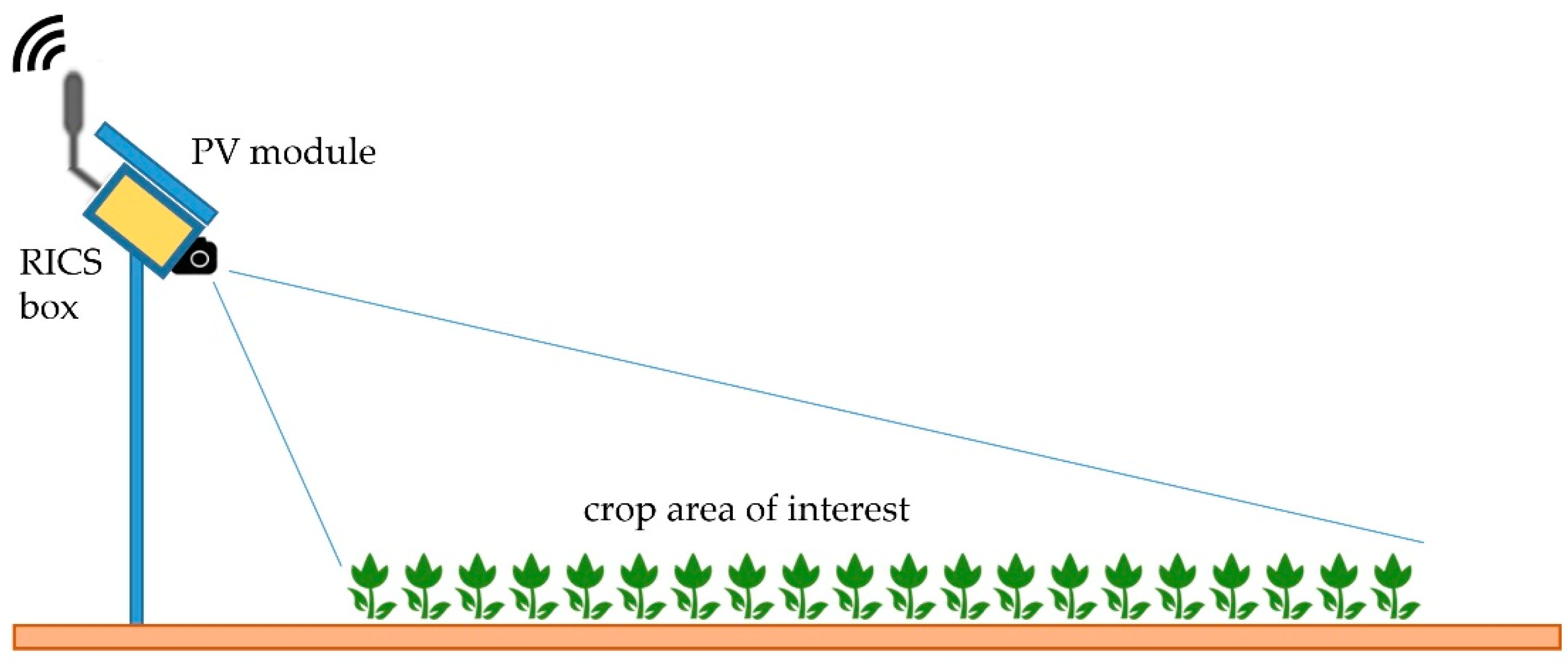
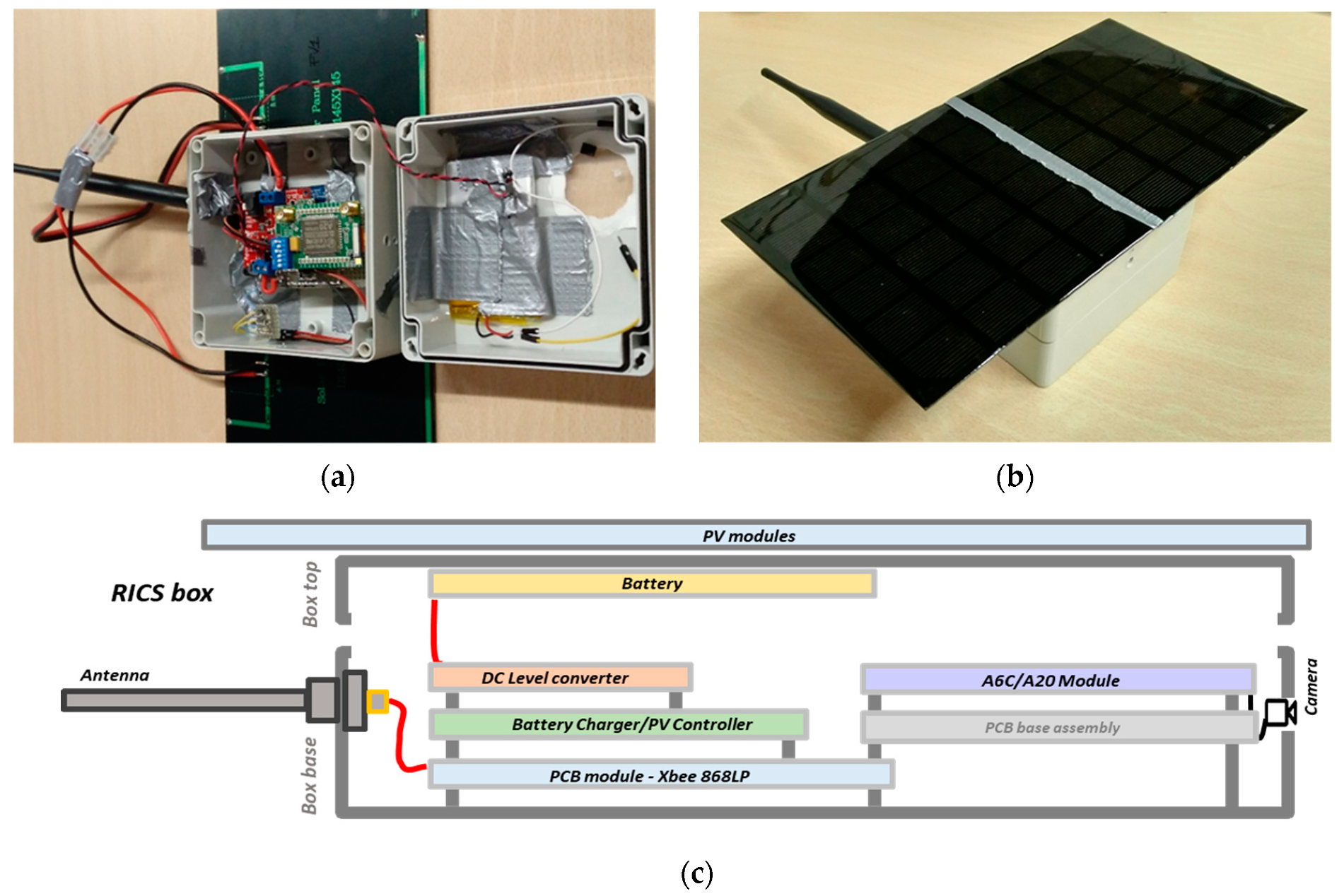
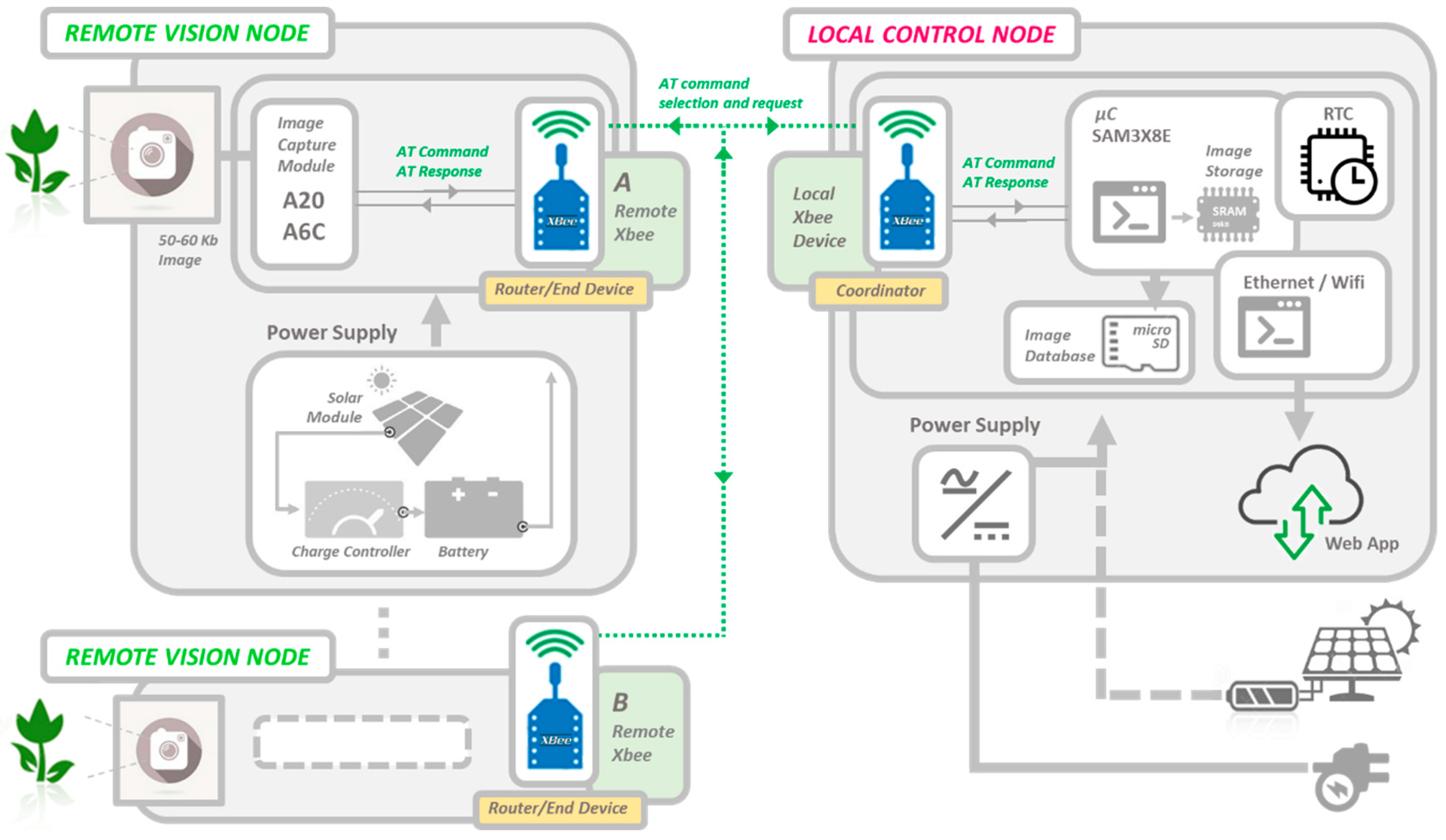
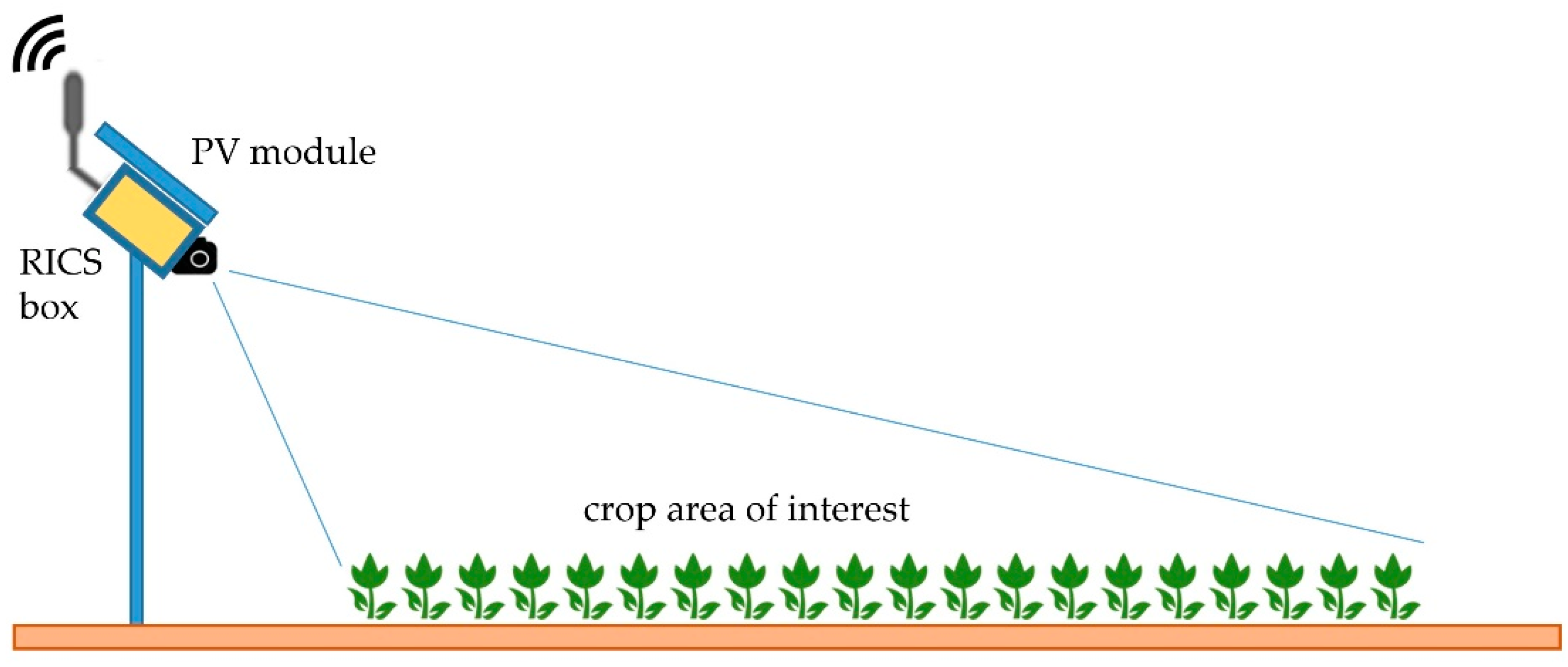
2.1. Description of the Remote Image Capture System (RICS)
2.1.1. Communication Module of the RICS Node
2.1.2. Image Capture Module of the RICS Node
2.1.3. Solar Power Supply of the RICS Node
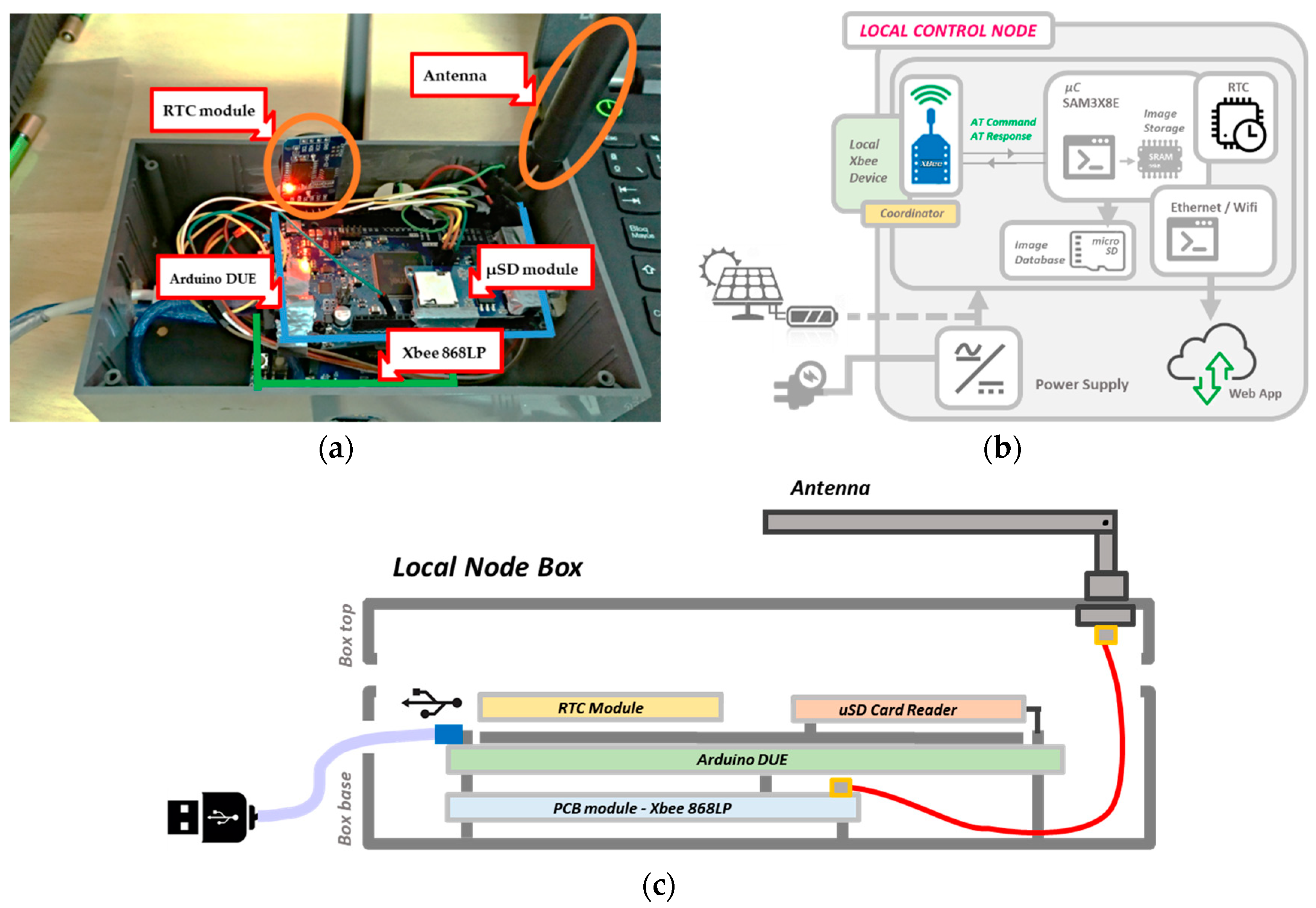
2.2. Description of the Base Station Coordinator Node
2.2.1. Real-Time Clock (RTC) Module of the Base Station
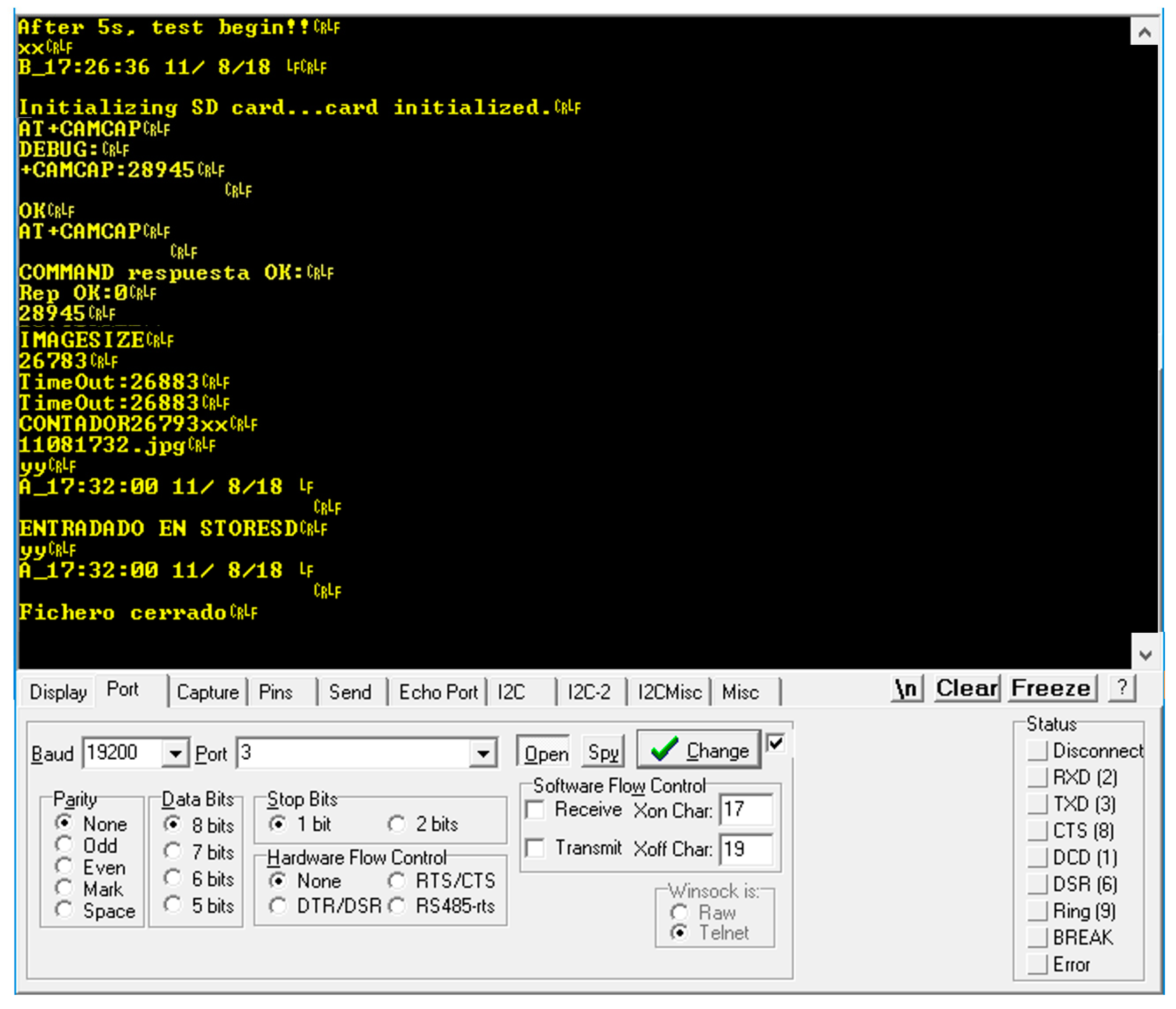
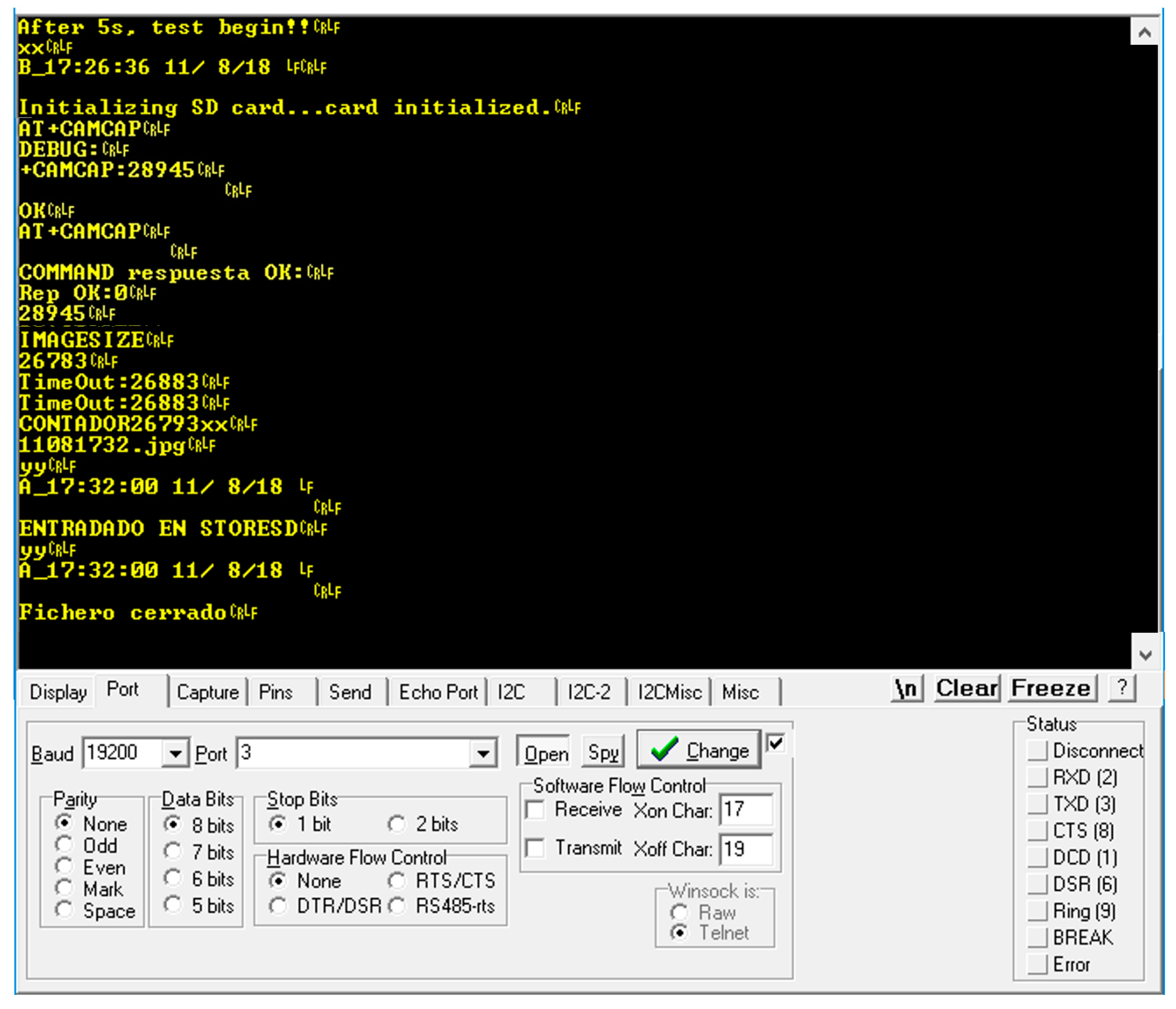
2.2.2. Control and Verification Console
2.2.3. Communication Module XBee 868LP of the Base Station
2.2.4. Embedded Microcontroller SAM3X8E
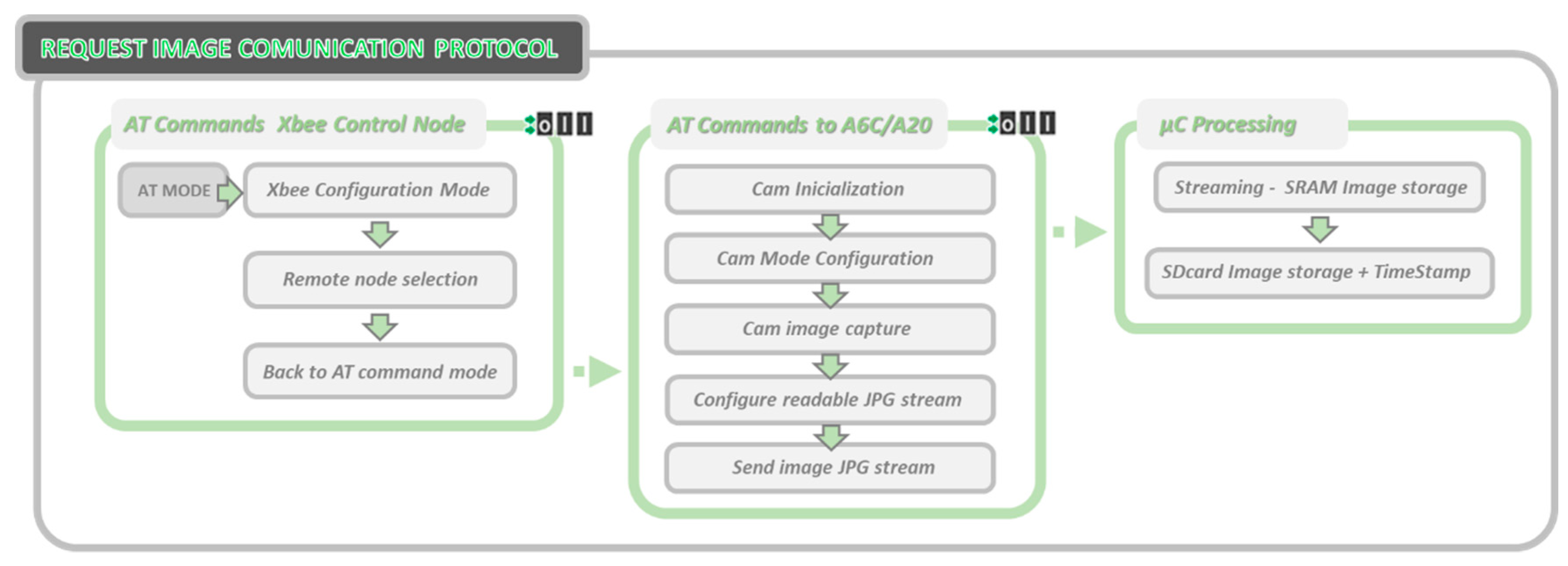
- Selecting the RICS node that has to take an image using live, timed or on-demand mode. This selection is done by the configuration of the XBee module of the local coordinator node with the adequate address of the remote XBee module.
- Sending the adequate set of AT instructions to the A20/A6C module to get a fully readable image format without need of data edition. With this feature, an improvement in the data transmission speed is achieved.
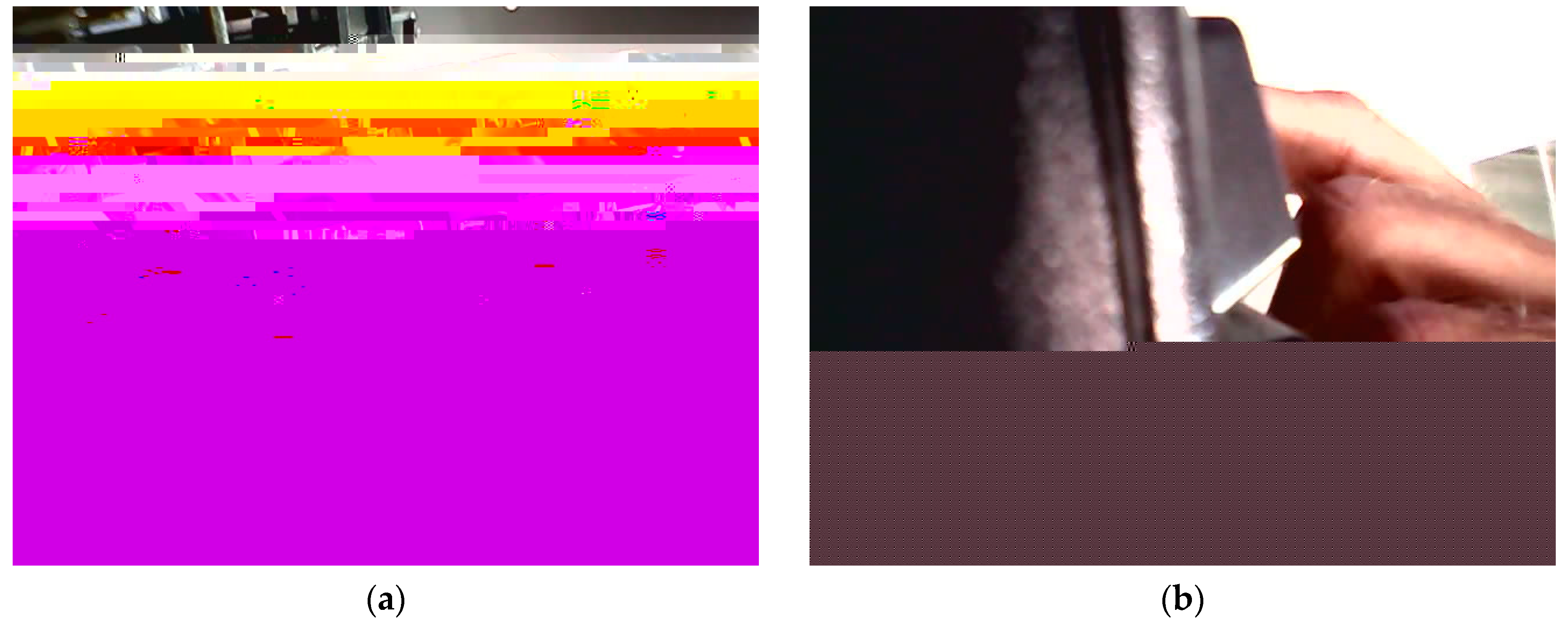
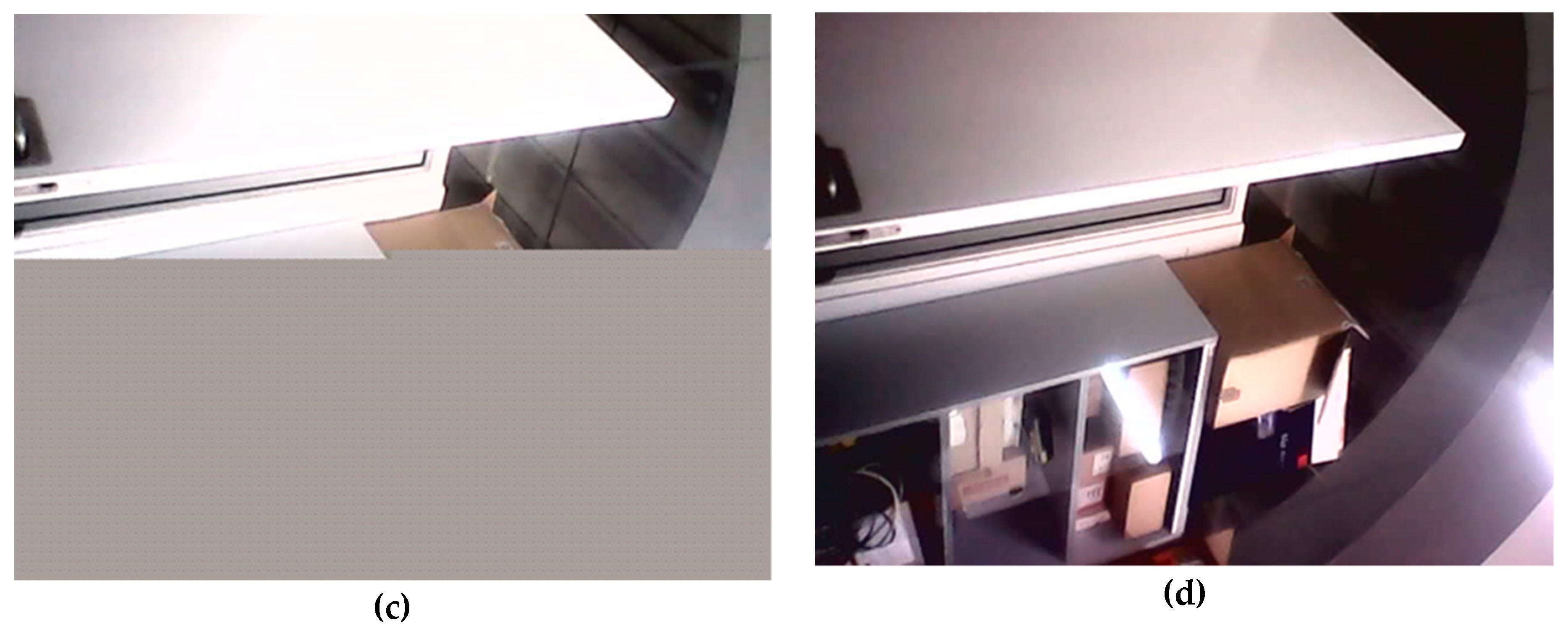
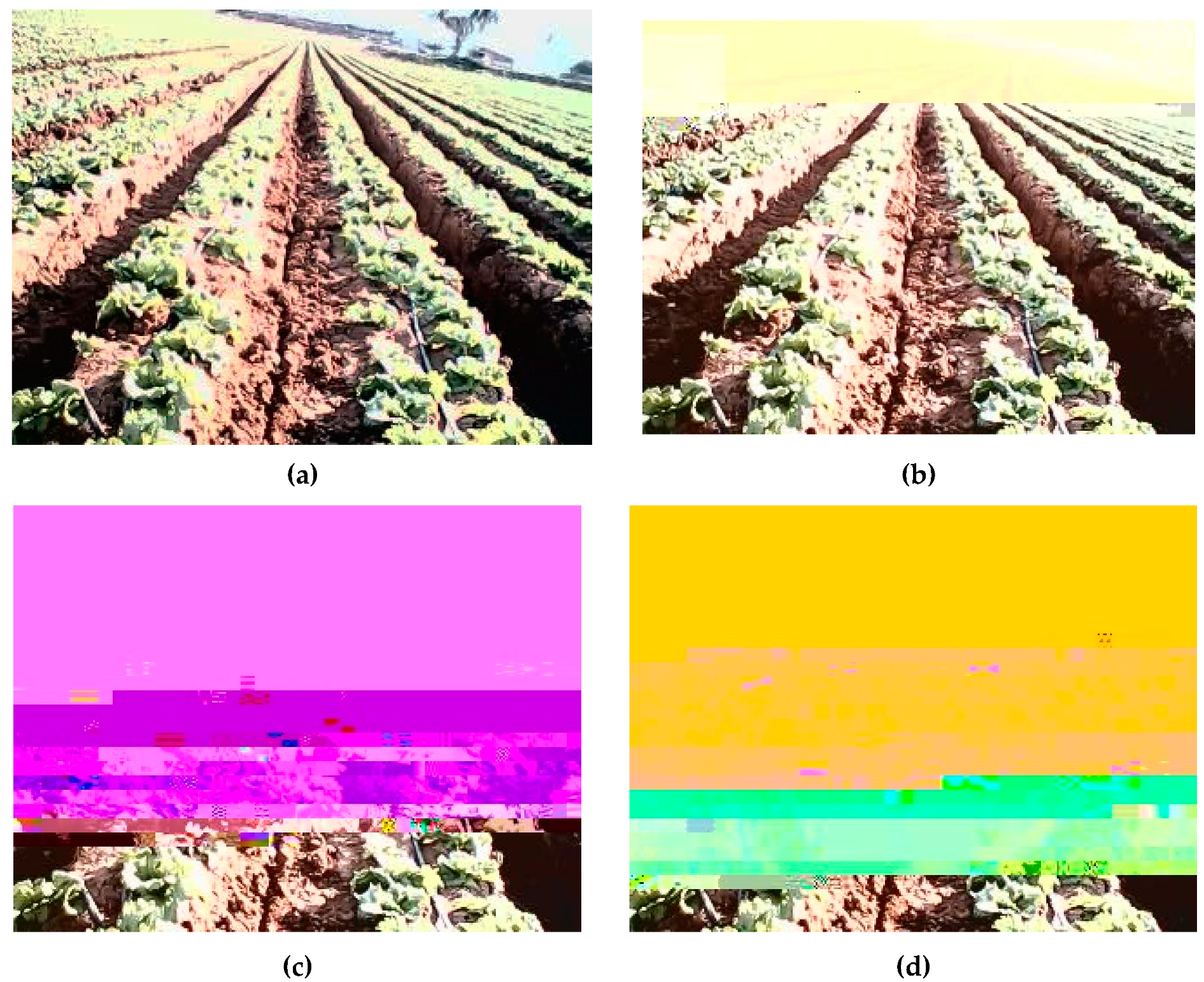
- Checking the integrity of the received image and, in case of errors in the image data, launching a new capture to obtain an image without data losses.
- Storing the image in a database, formatted with timestamp data to get a set of temporal readable images. In this way, the web control and monitoring system can make requests for any image in the database. The database is stored in a first-level SRAM (Static RAM) memory for quick access and in removable media storage (microSD).
- Setting the image capture to the time interval mode, configurable by the control node, to get the information required for irrigation, fertilization or harvesting decisions.
- Processing and transmission of the image received by HTML-POST on the remote server that links to the web application that contains the SCADA system [45].
3. Results and Discussion
3.1. Experiments on the Data Transmission Speed
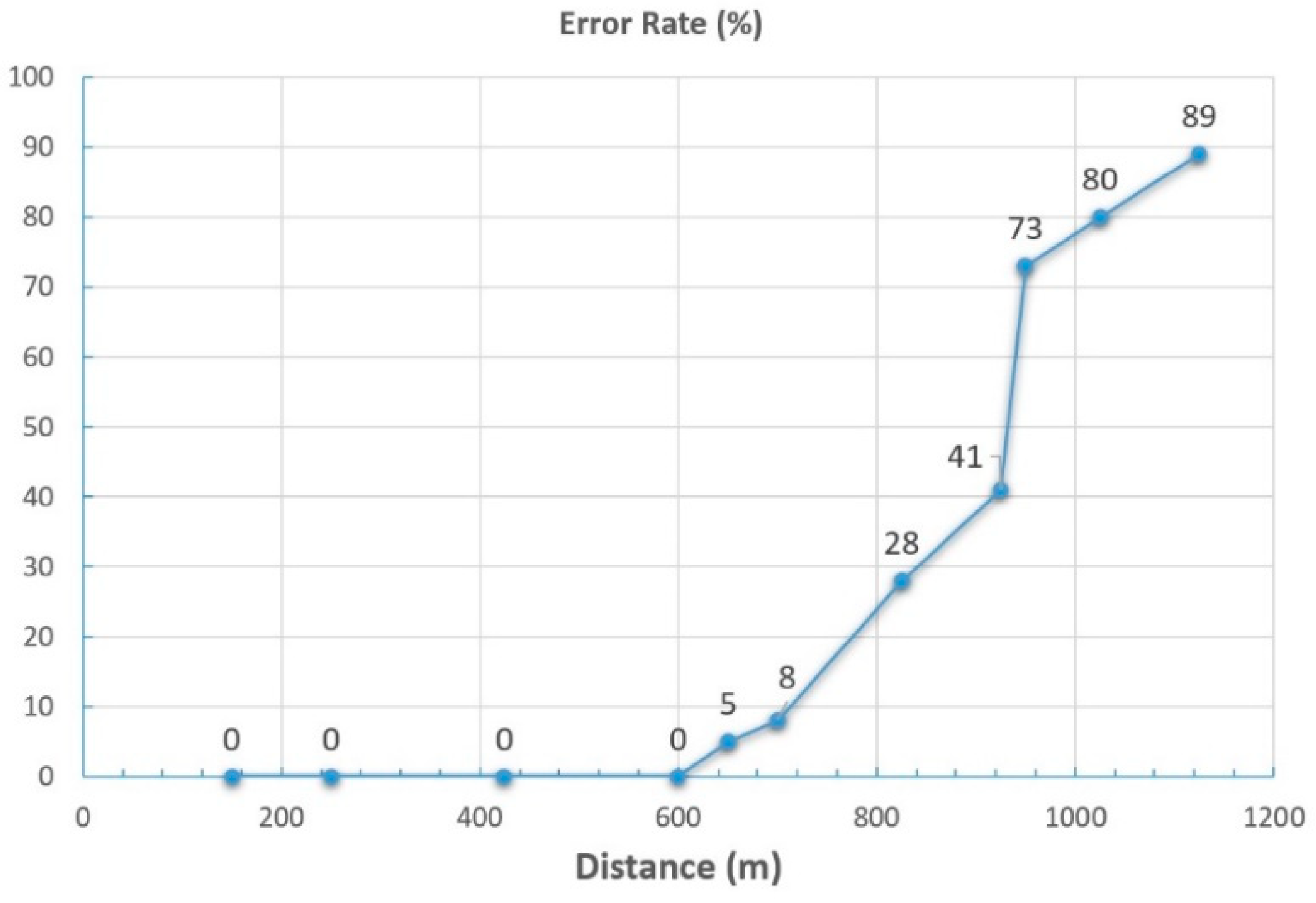
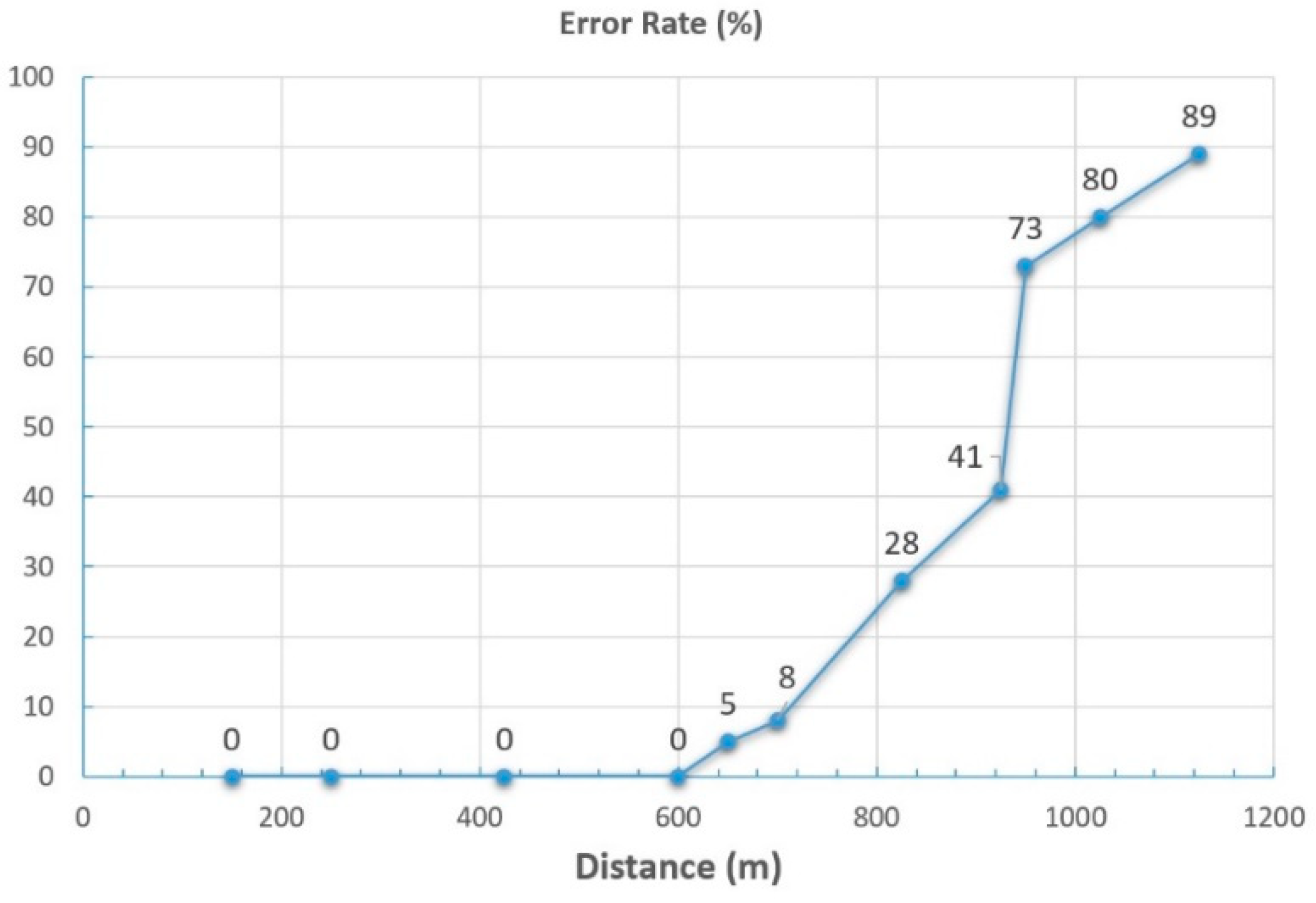
3.2. Experiments on Capture Distance
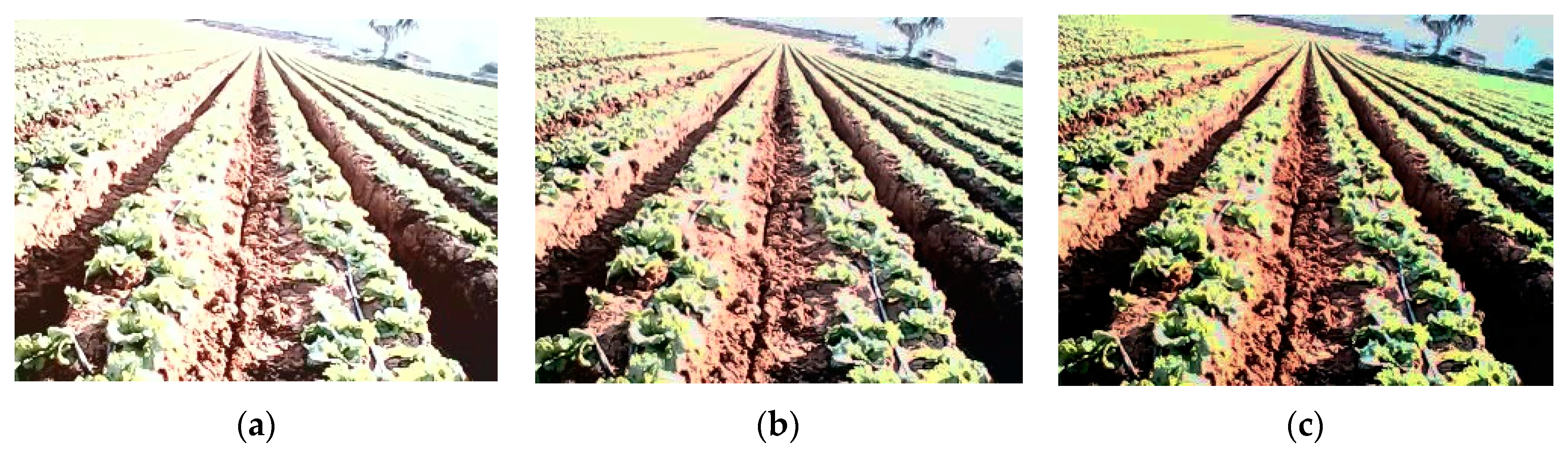
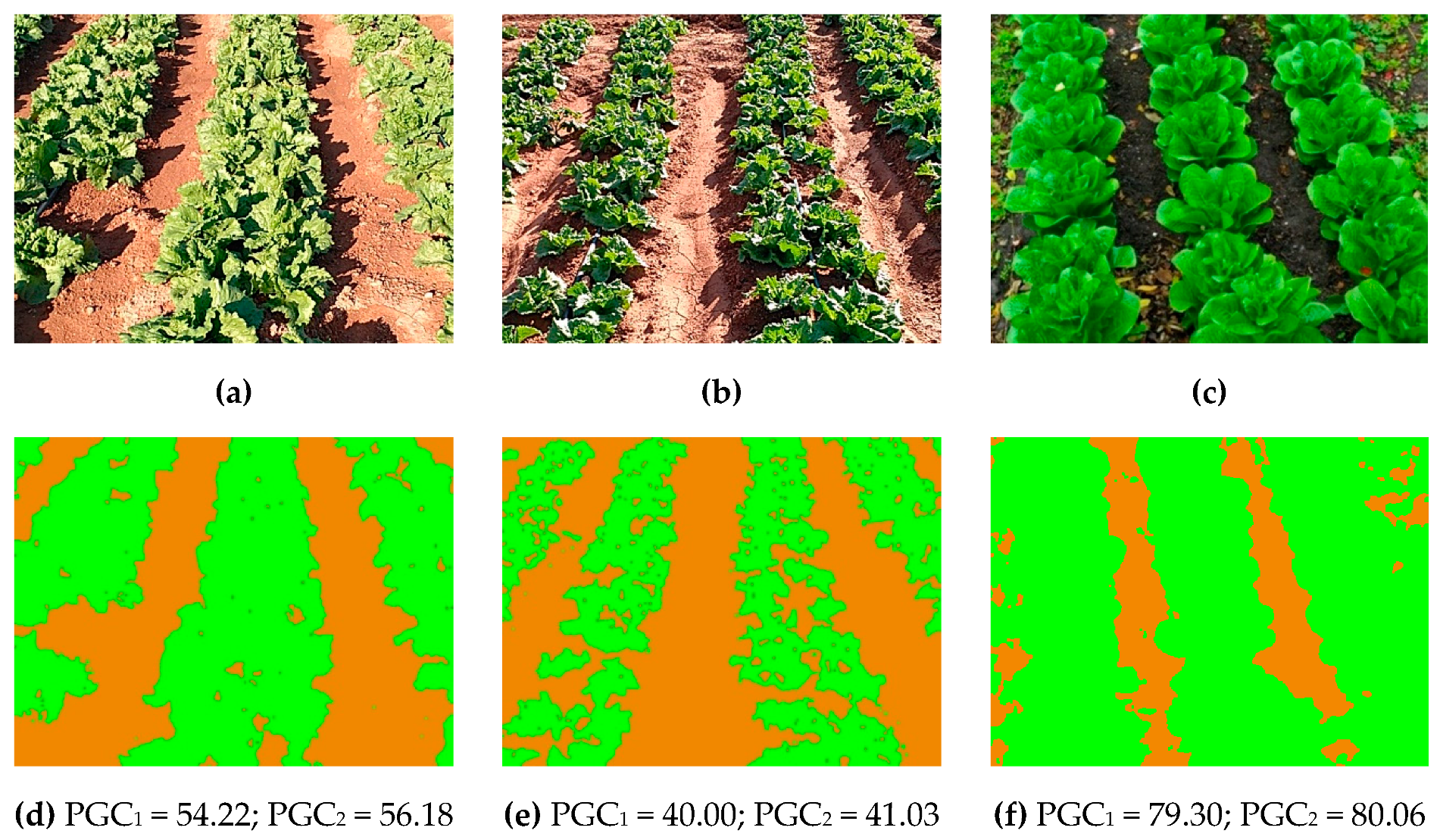
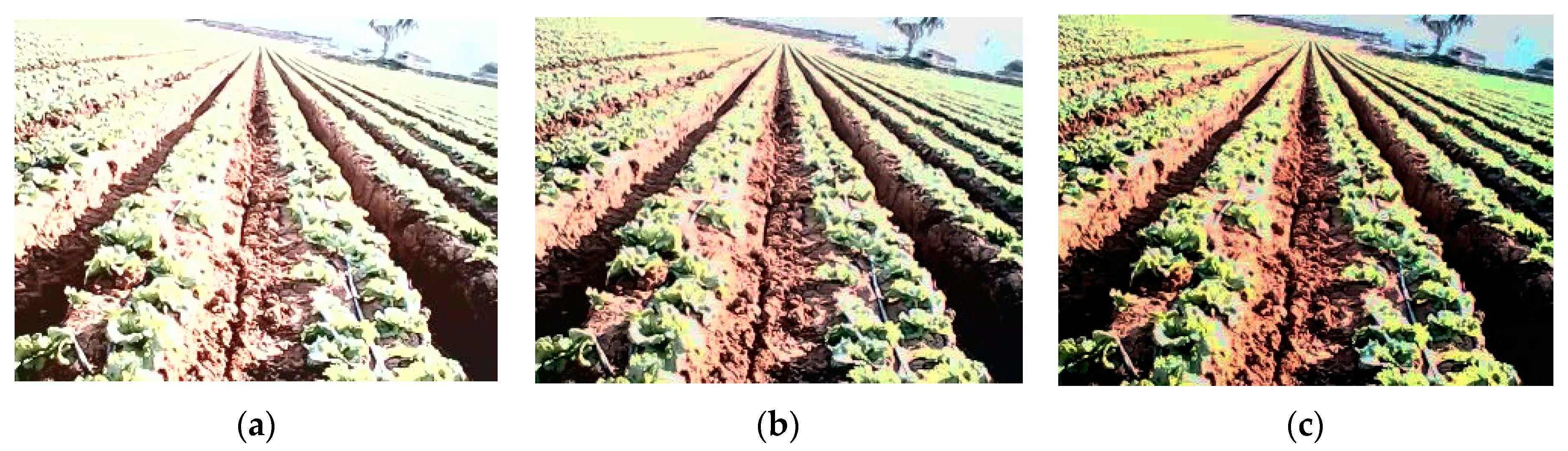
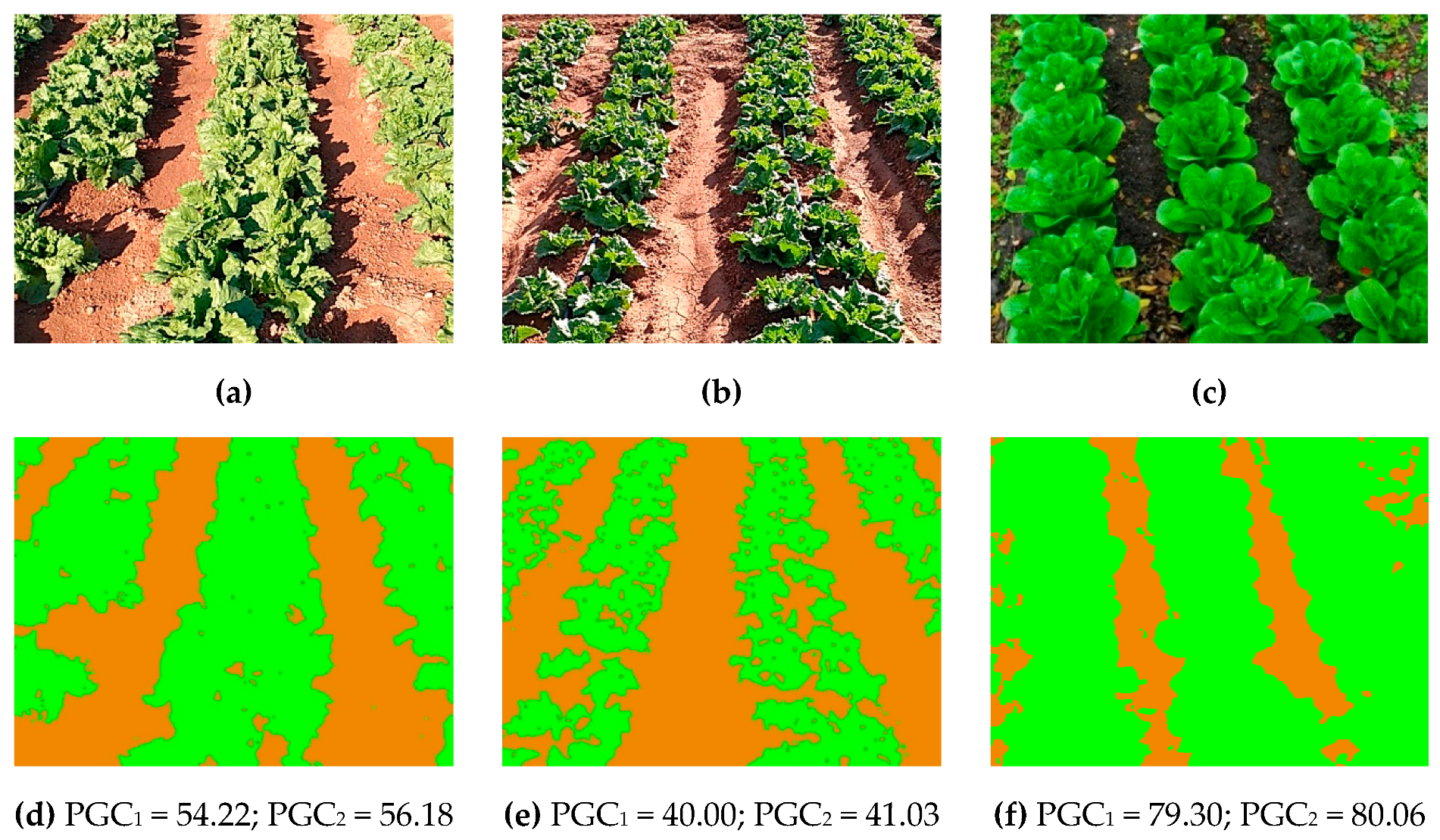
3.3. Experiments on Camera Capture Parameters and Plant/Soil Segmentation
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sesma, J.; Molina-Martínez, J.M.; Cavas-Martínez, F.; Fernández-Pacheco, D.G. A mobile application to calculate optimum drip irrigation laterals. Agric. Water Manag. 2015, 151, 13–18. [Google Scholar] [CrossRef]
- Levidow, L.; Pimbert, M.; Vanloqueren, G. Agroecological Research: Conforming—Or Transforming the Dominant Agro-Food Regime? Agroecol. Sustain. Food Syst. 2014, 38, 1127–1155. [Google Scholar] [CrossRef]
- Laliberte, A.S.; Rango, A.; Herrick, J. Unmanned aerial vehicles for rangeland mapping and monitoring: A comparison of two systems. In Proceedings of the American Society for Photogrammetry and Remote Sensing, Tampa, FL, USA, 7–11 May 2007. [Google Scholar]
- Xiang, H.; Tian, L. Method for automatic georeferencing aerial remote sensing (RS) images from an unmanned aerial vehicle (UAV) platform. Biosyst. Eng. 2011, 108, 104–113. [Google Scholar] [CrossRef]
- Raine, S.R.; Meyer, W.S.; Rassam, D.W.; Hutson, J.L.; Cook, F.J. Soil-water and solute movement under precision irrigation: Knowledge gaps for managing sustainable root zones. Irrig. Sci. 2007, 26, 91–100. [Google Scholar] [CrossRef]
- Adeyemi, O.; Grove, I.; Peets, S.; Norton, T. Advanced monitoring and management systems for improving sustainability in precision irrigation. Sustainability 2017, 9, 353. [Google Scholar] [CrossRef]
- Escarabajal-Henarejos, D.; Molina-Martínez, J.M.; Fernández-Pacheco, D.G.; Cavas-Martínez, F.; García-Mateos, G. Digital photography applied to irrigation management of Little Gem lettuce. Agric. Water Manag. 2015, 151, 148–157. [Google Scholar] [CrossRef]
- González-Esquiva, J.M.; García-Mateos, G.; Escarabajal-Henarejos, D.; Hernández-Hernández, J.L.; Ruiz-Canales, A.; Molina-Martínez, J.M. A new model for water balance estimation on lettuce crops using effective diameter obtained with image analysis. Agric. Water Manag. 2017, 183, 116–122. [Google Scholar] [CrossRef]
- Bogena, H.R.; Huisman, J.A.; Oberdörster, C.; Vereecken, H. Evaluation of a low-cost soil water content sensor for wireless network applications. J. Hydrol. 2007, 344, 32–42. [Google Scholar] [CrossRef]
- Díaz, S.E.; Pérez, J.C.; Mateos, A.C.; Marinescu, M.C.; Guerra, B.B. A novel methodology for the monitoring of the agricultural production process based on wireless sensor networks. Comput. Electron. Agric. 2011, 76, 252–265. [Google Scholar] [CrossRef]
- Coates, R.W.; Delwiche, M.J.; Broad, A.; Holler, M. Wireless sensor network with irrigation valve control. Comput. Electron. Agric. 2013, 96, 13–22. [Google Scholar] [CrossRef]
- Goumopoulos, C.; O’Flynn, B.; Kameas, A. Automated zone-specific irrigation with wireless sensor/actuator network and adaptable decision support. Comput. Electron. Agric. 2014, 105, 20–33. [Google Scholar] [CrossRef]
- Hernández-Hernández, J.L.; García-Mateos, G.; González-Esquiva, J.M.; Escarabajal-Henarejos, D.; Ruiz-Canales, A.; Molina-Martínez, J.M. Optimal color space selection method for plant/soil segmentation in agriculture. Comput. Electron. Agric. 2016, 122, 124–132. [Google Scholar] [CrossRef]
- Segovia-Cardozo, D.A.; Rodriguez-Sinobas, L.; Zubelzu, S. Water use efficiency of corn among the irrigation districts across the Duero river basin (Spain): Estimation of local crop coefficients by satellite images. Agric. Water Manag. 2019, 212, 241–251. [Google Scholar] [CrossRef]
- Li, L.; Mu, X.; Macfarlane, C.; Song, W.; Chen, J.; Yan, K.; Yan, G. A half-Gaussian fitting method for estimating fractional vegetation cover of corn crops using unmanned aerial vehicle images. Agric. For. Meteorol. 2018, 262, 379–390. [Google Scholar] [CrossRef]
- González-Esquiva, J.M.; Oates, M.J.; García-Mateos, G.; Moros-Valle, B.; Molina-Martínez, J.M.; Ruiz-Canales, A. Development of a visual monitoring system for water balance estimation of horticultural crops using low cost cameras. Comput. Electron. Agric. 2017, 141, 15–26. [Google Scholar] [CrossRef]
- Mora, M.; Avila, F.; Carrasco-Benavides, M.; Maldonado, G.; Olguín-Cáceres, J.; Fuentes, S. Automated computation of leaf area index from fruit trees using improved image processing algorithms applied to canopy cover digital photograpies. Comput. Electron. Agric. 2016, 123, 195–202. [Google Scholar] [CrossRef]
- Rosell, J.R.; Sanz, R. A review of methods and applications of the geometric characterization of tree crops in agricultural activities. Comput. Electron. Agric. 2012, 81, 124–141. [Google Scholar] [CrossRef]
- Brogi, C.; Huisman, J.A.; Pätzold, S.; von Hebel, C.; Weihermüller, L.; Kaufmann, M.S.; van der Kruk, J.; Vereecken, H. Large-scale soil mapping using multi-configuration EMI and supervised image classification. Geoderma 2019, 335, 133–148. [Google Scholar] [CrossRef]
- Schaeffer, B.A.; Schaeffer, K.G.; Keith, D.; Lunetta, R.S.; Conmy, R.; Gould, R.W. Barriers to adopting satellite remote sensing for water quality management. Int. J. Remote Sens. 2013, 34, 7534–7544. [Google Scholar] [CrossRef]
- Tzounis, A.; Katsoulas, N.; Bartzanas, T.; Kittas, C. Internet of Things in agriculture, recent advances and future challenges. Biosyst. Eng. 2017, 164, 31–48. [Google Scholar] [CrossRef]
- Hardin, P.J.; Hardin, T.J. Small-scale remotely piloted vehicles in environmental research. Geogr. Compass 2010, 4, 1297–1311. [Google Scholar] [CrossRef]
- Nebiker, S.; Annen, A.; Scherrer, M.; Oesch, D. A ligth weight multispectral sensor for micro UAV—Opportunities for very high resolution airborne remote sensing. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1193–1199. [Google Scholar]
- Lelong, C.C.D.; Burger, P.; Jubelin, G.; Roux, B.; Labbé, S.; Baret, F. Assessment of unmanned aerial vehicles imagery for quantitative monitoring of wheat crop in small plots. Sensors 2008, 8, 3557–3585. [Google Scholar] [CrossRef] [PubMed]
- Laliberte, A.S.; Rango, A. Image Processing and Classification Procedures for Analysis of Sub-decimeter Imagery Acquired with an Unmanned Aircraft over Arid Rangelands. GIScience Remote Sens. 2011, 48, 4–23. [Google Scholar] [CrossRef]
- Hardin, P.J.; Jensen, R.R. Small-Scale Unmanned Aerial Vehicles in Environmental Remote Sensing: Challenges and Opportunities. GIScience Remote Sens. 2011, 48, 99–111. [Google Scholar] [CrossRef]
- Andrade-sanchez, P.; Pierce, F.J.; Elliott, T.V. Performance Assessment of Wireless Sensor Networks in Agricultural Settings. In 2007 ASAE Annual Meeting; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2007; p. 1. [Google Scholar]
- Tate, R.F.; Hebel, M.A.; Watson, D.G. WSN link budget analysis for precision agriculture. In Proceedings of the American Society of Agricultural and Biological Engineers Annual International Meeting, St. Joseph, MI, USA, 29 June–2 July 2008. [Google Scholar]
- Mayer, K.; Ellis, K.; Taylor, K. Cattle health monitoring using wireless sensor networks. In Proceedings of the Communication and Computer Networks Conference (CCN 2004); ACTA Press: Calgary, AB, Canada, 2004; pp. 8–10. [Google Scholar]
- Osroosh, Y.; Khot, L.R.; Peters, R.T. Economical thermal-RGB imaging system for monitoring agricultural crops. Comput. Electron. Agric. 2018, 147, 34–43. [Google Scholar] [CrossRef]
- Goense, D.; Thelen, J. Wireless sensor networks for precise Phytophthora decision supportv. In Proceedings of the 2005 ASAE Annual Meeting. American Society of Agricultural and Biological Engineers, Tampa, FL, USA, 25–27 September 2005. [Google Scholar]
- Haneveld, P.K. Evading Murphy: A Sensor Network Deployment in Precision Agriculture; Delft, The Netherlands, 28 June 2007. [Google Scholar]
- Ruiz-Garcia, L.; Barreiro, P.; Robla, J.I. Performance of ZigBee-Based wireless sensor nodes for real-time monitoring of fruit logistics. J. Food Eng. 2008, 87, 405–415. [Google Scholar] [CrossRef]
- Martin, A.; Hebel, M.A.; Ralph, F.; Tate, R.F.; Dennis, G.; Watson, D.G. Results of Wireless Sensor Network Transceiver Testing for Agricultural Applications. In Proceedings of the 2007 ASAE Annual Meeting, Minneapolis, MN, USA, 17–20 June 2007. [Google Scholar]
- Zhang, N.; Wang, M.; Wang, N. Precision agriculture—A worldwide overview. Comput. Electron. Agric. 2002, 36, 113–132. [Google Scholar] [CrossRef]
- Jawad, H.M.; Nordin, R.; Gharghan, S.K.; Jawad, A.M.; Ismail, M. Energy-efficient wireless sensor networks for precision agriculture: A review. Sensors 2017, 17, 1781. [Google Scholar] [CrossRef]
- Malaver, A.; Motta, N.; Corke, P.; Gonzalez, F. Development and integration of a solar powered unmanned aerial vehicle and a wireless sensor network to monitor greenhouse gases. Sensors 2015, 15, 4072–4096. [Google Scholar] [CrossRef]
- Aquino-Santos, R.; González-Potes, A.; Edwards-Block, A.; Virgen-Ortiz, R.A. Developing a new wireless sensor network platform and its application in precision agriculture. Sensors 2011, 11, 1192–1211. [Google Scholar] [CrossRef] [PubMed]
- Cancela, J.J.; Fandiño, M.; Rey, B.J.; Martínez, E.M. Automatic irrigation system based on dual crop coefficient, soil and plant water status for Vitis vinifera (cv Godello and cv Mencía). Agric. Water Manag. 2015, 151, 52–63. [Google Scholar] [CrossRef]
- Rao, Y.; Jiang, Z.H.; Lazarovitch, N. Investigating signal propagation and strength distribution characteristics of wireless sensor networks in date palm orchards. Comput. Electron. Agric. 2016, 124, 107–120. [Google Scholar] [CrossRef]
- Edwards-Murphy, F.; Magno, M.; Whelan, P.M.; O’Halloran, J.; Popovici, E.M. B+WSN: Smart beehive with preliminary decision tree analysis for agriculture and honey bee health monitoring. Comput. Electron. Agric. 2016, 124, 211–219. [Google Scholar] [CrossRef]
- Sai, Z.; Fan, Y.; Yuliang, T.; Lei, X.; Yifong, Z. Optimized algorithm of sensor node deployment for intelligent agricultural monitoring. Comput. Electron. Agric. 2016, 127, 76–86. [Google Scholar] [CrossRef]
- Fernández-Pacheco, D.G.; Ferrández-Villena, M.; Molina-Martínez, J.M.; Ruiz-Canales, A. Performance indicators to assess the implementation of automation in water user associations: A case study in southeast Spain. Agric. Water Manag. 2015, 151, 87–92. [Google Scholar] [CrossRef]
- Aiello, G.; Giovino, I.; Vallone, M.; Catania, P.; Argento, A. A decision support system based on multisensor data fusion for sustainable greenhouse management. J. Clean. Prod. 2018, 151, 87–92. [Google Scholar] [CrossRef]
- González-Esquiva, J.M.; García-Mateos, G.; Hernández-Hernández, J.L.; Ruiz-Canales, A.; Escarabajal-Henerajos, D.; Molina-Martínez, J.M. Web application for analysis of digital photography in the estimation of irrigation requirements for lettuce crops. Agric. Water Manag. 2017, 183, 136–145. [Google Scholar] [CrossRef]
- Escarabajal-Henarejos, D.; Molina-Martínez, J.M.; Fernández-Pacheco, D.G.; García-Mateos, G. Methodology for obtaining prediction models of the root depth of lettuce for its application in irrigation automation. Agric. Water Manag. 2015, 151, 167–173. [Google Scholar] [CrossRef]
- Warren, G.; Metternicht, G. Agricultural applications of high-resolution digital multispectral imagery: Evaluating within-field spatial variability of canola (Brassica napus) in Western Australia. Photogramm. Eng. Remote Sens. 2005, 71, 595–602. [Google Scholar] [CrossRef]
- Sudevalayam, S.; Kulkarni, P. Energy harvesting sensor nodes: Survey and implications. IEEE Commun. Surv. Tutorials 2011, 43, 443–461. [Google Scholar] [CrossRef]
- Akhtar, F.; Rehmani, M.H. Energy replenishment using renewable and traditional energy resources for sustainable wireless sensor networks: A review. Renew. Sustain. Energy Rev. 2015, 45, 769–784. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, P.; Han, W.; Yu, X. Remote monitoring system for agricultural information based on wireless sensor network. J. Chin. Inst. Eng. Trans. Chin. Inst. Eng. A 2017, 40, 75–81. [Google Scholar] [CrossRef]
- Gutierrez, J.; Villa-Medina, J.F.; Nieto-Garibay, A.; Porta-Gandara, M.A. Automated irrigation system using a wireless sensor network and GPRS module. IEEE Trans. Instrum. Meas. 2014, 63, 166–176. [Google Scholar] [CrossRef]
- Hernández-Hernández, J.L.; Ruiz-Hernández, J.; García-Mateos, G.; González-Esquiva, J.M.; Ruiz-Canales, A.; Molina-Martínez, J.M. A new portable application for automatic segmentation of plants in agriculture. Agric. Water Manag. 2017, 183, 146–157. [Google Scholar] [CrossRef]
- Allen, R.G.; Luis, S.P.; RAES, D.; Smith, M. FAO Irrigation and Drainage Paper No. 56. Crop Evapotranspiration (Guidelines for Computing Crop Water Requirements); FAO: Rome, Italy, 1998. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
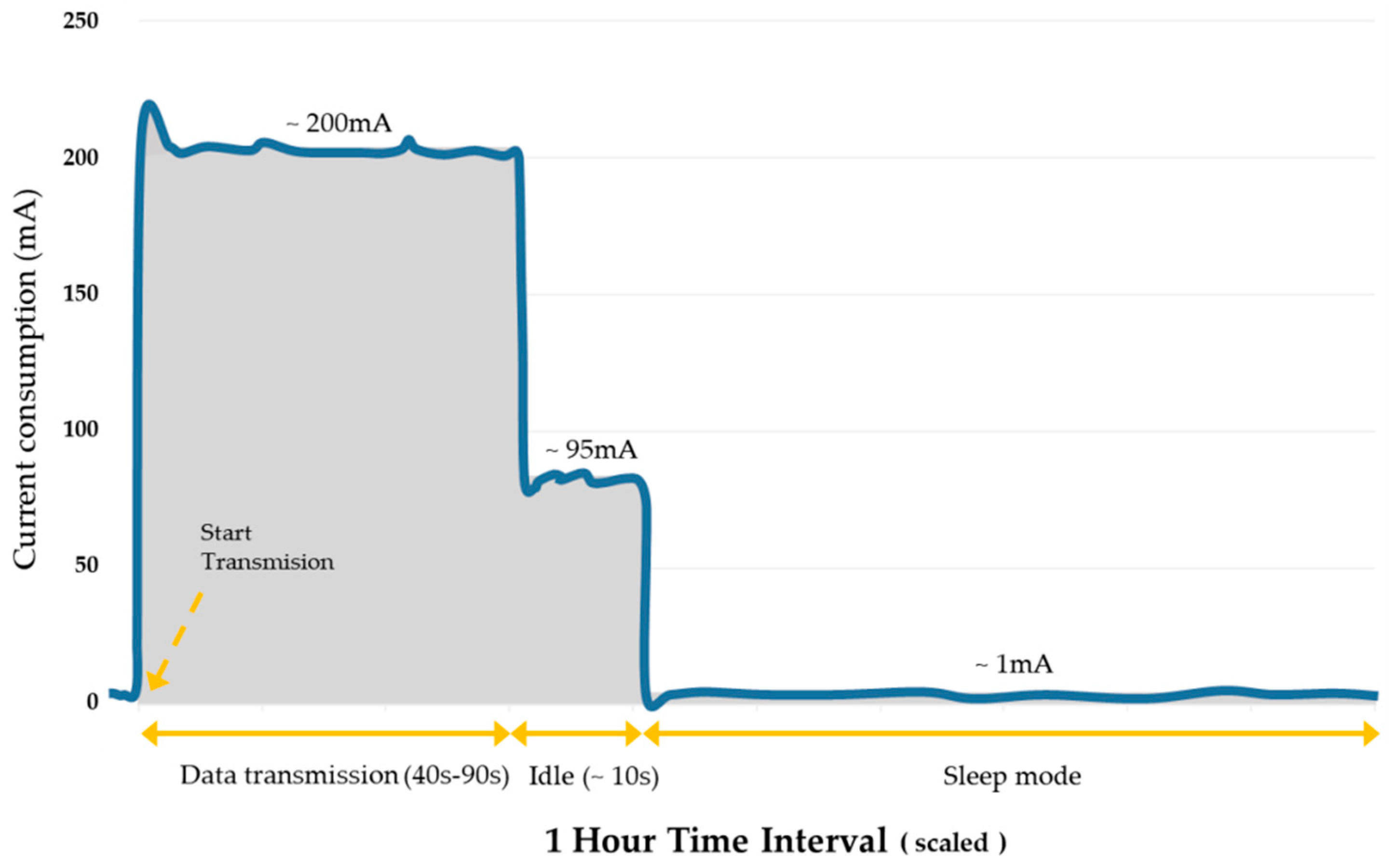
| Measured Current Consumption | Power on | Idle | Idle + Cam on | High Rate Transmission | Sleep Mode |
|---|---|---|---|---|---|
| A20/A6C + XBee 868LP + Battery charger | 200 mA | 95 mA | 140 mA (180 mA peaks) | 200 mA (240 mA peaks) | 1.2 mA |
| XBee 868LP | 25 mA | 25 mA | 50 mA | 1.7 µA | |
| Battery charger | - | - | - | - | 85 µA |
| A20/A6C camera | 60 mA | 115 mA | 150 mA | <1 mA |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mateo-Aroca, A.; García-Mateos, G.; Ruiz-Canales, A.; Molina-García-Pardo, J.M.; Molina-Martínez, J.M. Remote Image Capture System to Improve Aerial Supervision for Precision Irrigation in Agriculture. Water 2019, 11, 255. https://doi.org/10.3390/w11020255
Mateo-Aroca A, García-Mateos G, Ruiz-Canales A, Molina-García-Pardo JM, Molina-Martínez JM. Remote Image Capture System to Improve Aerial Supervision for Precision Irrigation in Agriculture. Water. 2019; 11(2):255. https://doi.org/10.3390/w11020255
Chicago/Turabian StyleMateo-Aroca, Antonio, Ginés García-Mateos, Antonio Ruiz-Canales, José María Molina-García-Pardo, and José Miguel Molina-Martínez. 2019. "Remote Image Capture System to Improve Aerial Supervision for Precision Irrigation in Agriculture" Water 11, no. 2: 255. https://doi.org/10.3390/w11020255
APA StyleMateo-Aroca, A., García-Mateos, G., Ruiz-Canales, A., Molina-García-Pardo, J. M., & Molina-Martínez, J. M. (2019). Remote Image Capture System to Improve Aerial Supervision for Precision Irrigation in Agriculture. Water, 11(2), 255. https://doi.org/10.3390/w11020255