A Modified k – ε Turbulence Model for a Wave Breaking Simulation




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- The production of the turbulent kinetic energy dissipation is calculated by a dynamic procedure. In the surf zone the production of turbulent kinetic energy dissipation is limited by the dynamic coefficient, related to the local derivative of the free surface. Consequently, differently from the standard model, it is possible to limit the non-physical decrease of the wave height.
2. Motion Equations
3. Turbulence Model
- The coefficient is determined by a dynamic procedure proposed by Yakhot et al. [20]:where .
- The closure relation that limits the production of dissipation rate is proposed as a function of the local derivative of the free surface.varies between ; is a linear function and it is related to the steepness of the wave front :
- The closure relation of the production of turbulent kinetic energy takes into account the nonlinear terms and is given bywhere is the scalar inner product between the second order tensors.The Reynolds stress is calculated by a nonlinear model and is expressed in a boundary conforming curvilinear grid, in which vector and tensor quantities are given in terms of Cartesian components:where expresses the transposed terms; is the identity tensor; , , , and are empirical coefficients:whereThe boundary conditions on the bottom concern the turbulent kinetic energy and the dissipation rate:where represents the friction velocity:is the von Karman constant and is the roughness.
4. Results
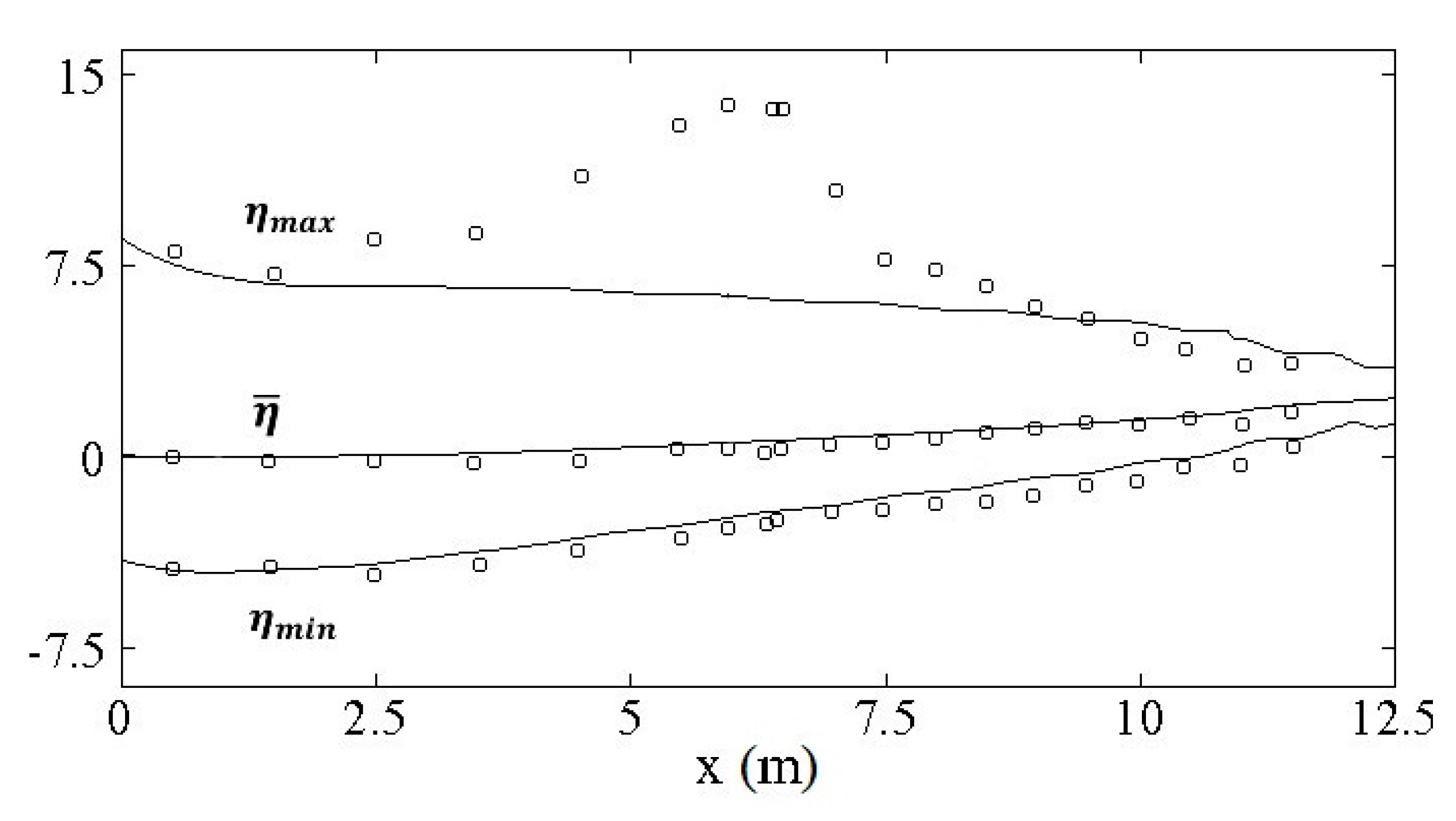
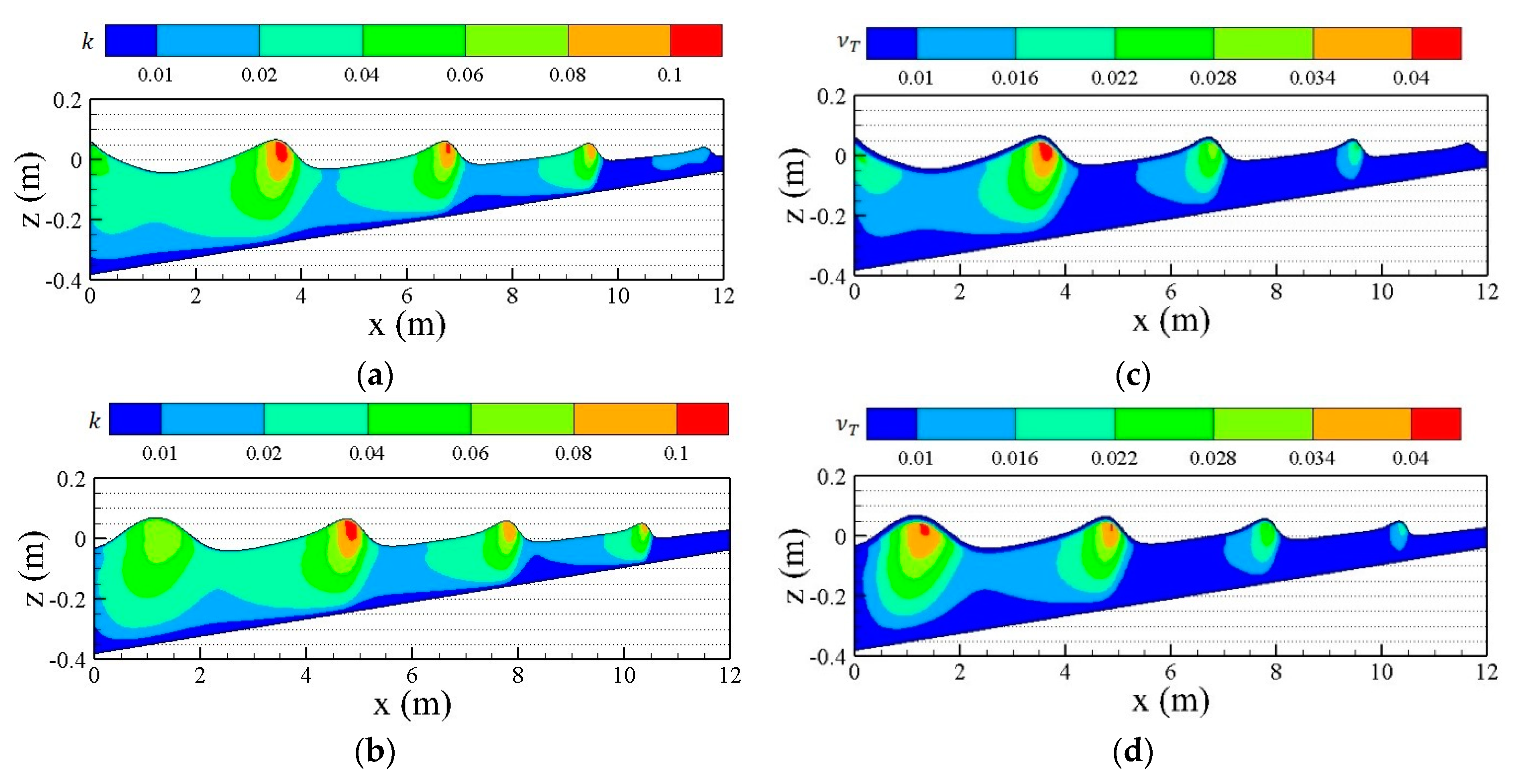
4.1. Spilling Breaking Test without Turbulence Model
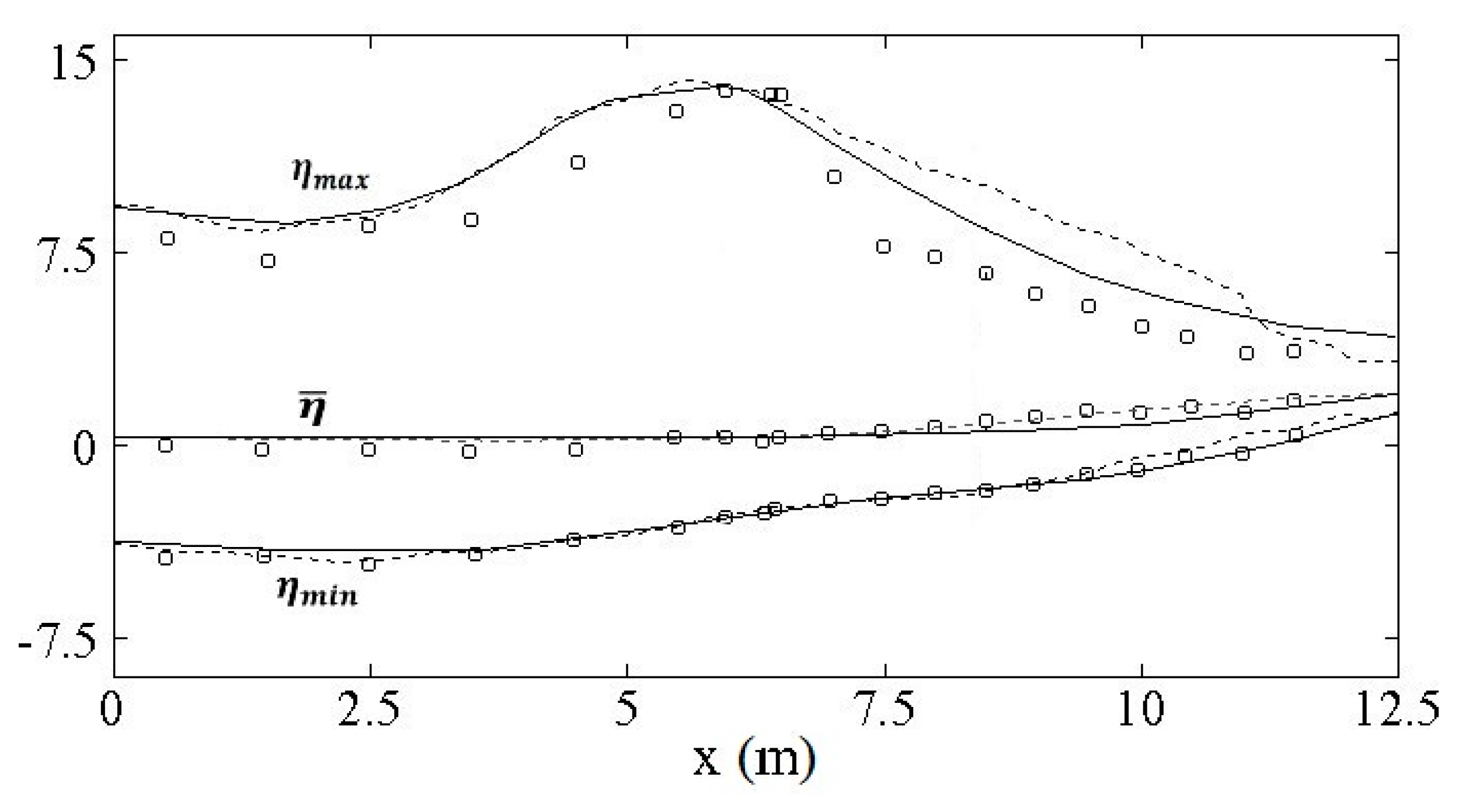
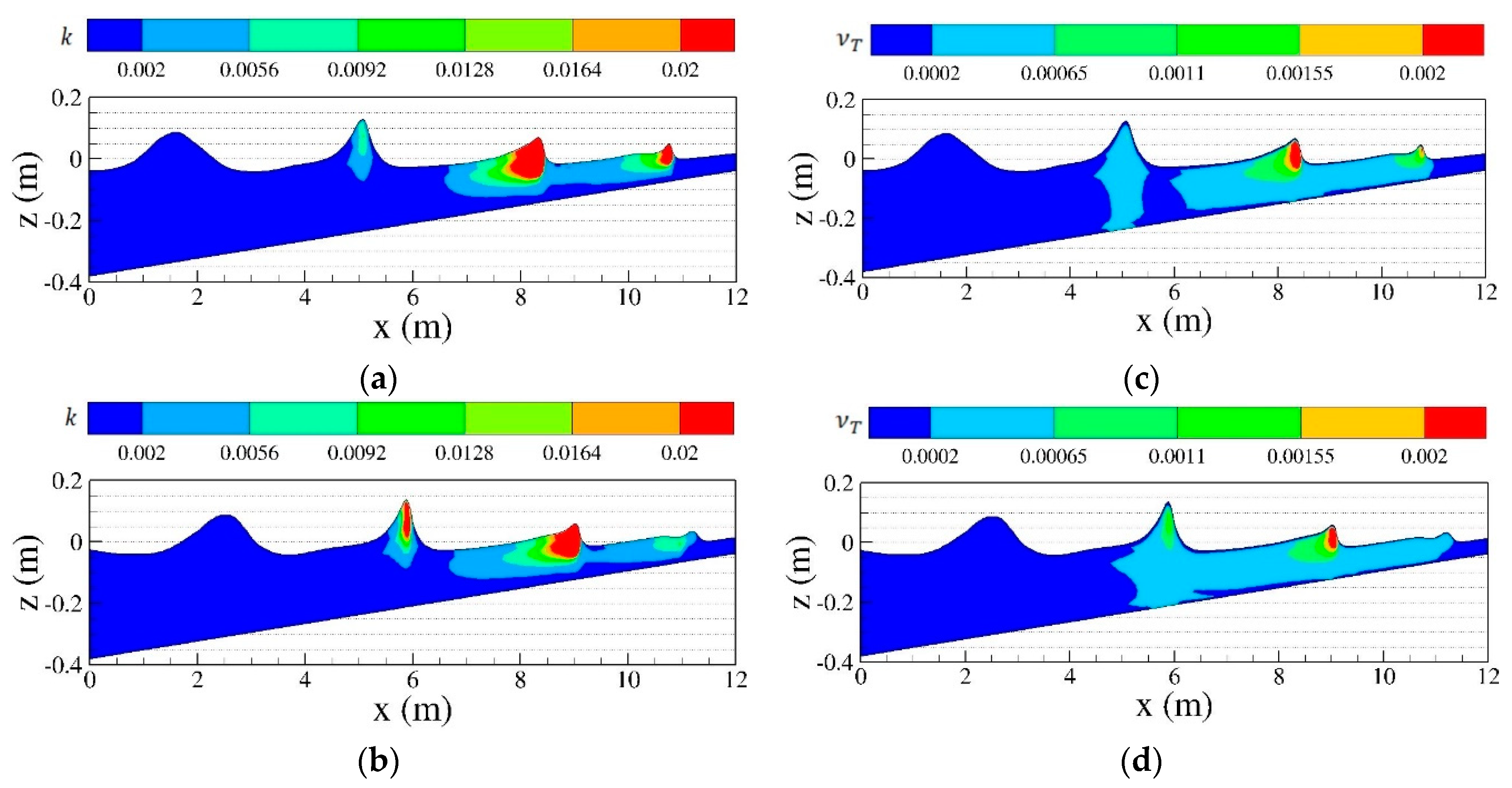
4.2. Spilling Breaking Test with Turbulence Model
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cannata, G.; Barsi, L.; Petrelli, C.; Gallerano, F. Numerical investigation of wave fields and currents in a coastal engineering case study. WSEAS Trans. Fluid Mech. 2018, 13, 87–94. [Google Scholar]
- Shi, F.; Kirby, J.T.; Harris, J.C.; Geiman, J.D.; Grilli, S.T. A high-order adaptive time-stepping TVD solver for Boussinesq modelling of breaking waves and coastal inundation. Ocean Model. 2012, 43–44, 36–51. [Google Scholar] [CrossRef]
- Gallerano, F.; Cannata, G.; De Gaudenzi, O.; Scarpone, S. Modeling bed evolution using weakly coupled phase-resolving wave model and wave-averaged sediment transport model. Coast. Eng. J. 2016, 58. [Google Scholar] [CrossRef]
- Cannata, G.; Petrelli, C.; Barsi, L.; Fratello, F.; Gallerano, F. A dam-break flood simulation model in curvilinear coordinates. WSEAS Trans. Fluid Mech. 2018, 13, 60–70. [Google Scholar]
- Kazolea, M.; Ricchiuto, M. On wave breaking for Boussinesq-type models. Ocean Model. 2018, 123, 16–39. [Google Scholar] [CrossRef]
- Fredsøe, J.; Andersen, O.H.; Silberg, S. Distribution of Suspended Sediment in Large Waves. J. Waterw. Port Coast. Ocean Eng. 1985, 111, 1041–1059. [Google Scholar] [CrossRef]
- Deigaard, R.; Fredsøe, J.; Hedegaard, I.B. Suspended sediment in the surf zone. J. Waterw. Port Coast. Ocean Eng. 1986, 112, 115–128. [Google Scholar] [CrossRef]
- Rakha, K.A. A Quasi-3D phase-resolving hydrodynamic and sediment transport model. Coast. Eng. 1998, 34, 277–311. [Google Scholar] [CrossRef]
- Harlow, F.H.; Welch, J.E. Numerical Calculation of Time-Dependent Viscous Incompressible Flow of Fluid with Free Surface. Phys. Fluids 1965, 8, 2182–2189. [Google Scholar] [CrossRef]
- Bradford, S.F. Numerical Simulation of Surf Zone Dynamics. J. Waterw. Port Coast. Ocean Eng. 2000, 126, 1–13. [Google Scholar] [CrossRef]
- Phillips, N.A. A coordinate system having some special advantages for numerical forecasting. J. Meteorol. 1956, 14, 184–185. [Google Scholar] [CrossRef]
- Ma, G.; Shi, F.; Kirby, J.T. Shock-capturing non-hydrostatic model for fully dispersive surface wave processes. Ocean Model. 2012, 43–44, 22–35. [Google Scholar] [CrossRef]
- Cannata, G.; Petrelli, C.; Barsi, L.; Camilli, F.; Gallerano, F. 3D free surface flow simulations based on the integral form of the equations of motion. WSEAS Trans. Fluid Mech. 2017, 12, 166–175. [Google Scholar]
- Gallerano, F.; Cannata, G.; Lasaponara, F.; Petrelli, C. A new three-dimensional finite-volume non-hydrostatic shock-capturing model for free surface flow. J. Hydrodyn. 2017, 29, 552–566. [Google Scholar] [CrossRef]
- Toro, E. Riemann Solvers and Numerical Methods for Fluid Dynamics: A practical Introduction, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Ma, G.; Chou, Y.-J.; Shi, F. A wave-resolving model for nearshore suspended sediment transport. Ocean Model. 2014, 77, 33–49. [Google Scholar] [CrossRef]
- Bosch, G.; Rodi, W. Simulation of vortex shedding past a square cylinder with different turbulence models. Int. J. Numer. Met. Fluids 1998, 28, 601–616. [Google Scholar] [CrossRef]
- Ting, F.C.K.; Kirby, J.T. Observation of undertow and turbulence in a wave period. Costal Eng. 1994, 24, 51–80. [Google Scholar] [CrossRef]
- Lin, P.; Liu, P.L.-F. A numerical study of breaking waves in the surf zone. J. Fluid Mech. 1998, 359, 239–264. [Google Scholar] [CrossRef]
- Derakhti, M.; Kirby, J.T.; Ma, G. NHWAVE: Consistent boundary conditions and turbulence modeling. Ocean Model. 2016, 106, 121–130. [Google Scholar] [CrossRef]
- Yakhot, V.; Orszag, S.; Thangam, S.; Gatski, T.; Speziale, C. Development of turbulence models for shear flows by double expansion technique. Phys. Fluids A Fluid Dyn. 1992, 4, 1–26. [Google Scholar] [CrossRef]
- Gallerano, F.; Cannata, G.; Barsi, L.; Palleschi, F.; Iele, B. Simulation of wave motion and wave breaking induced energy dissipation. WSEAS Trans. Fluid Mech. 2019, 14, 62–69. [Google Scholar]
- Rodi, W. Examples of calculation methods for flow and mixing in stratified flows. J. Geophys. Res. 1987, 92, 5305–5328. [Google Scholar] [CrossRef]









© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cannata, G.; Palleschi, F.; Iele, B.; Gallerano, F. A Modified k – ε Turbulence Model for a Wave Breaking Simulation. Water 2019, 11, 2282. https://doi.org/10.3390/w11112282
Cannata G, Palleschi F, Iele B, Gallerano F. A Modified k – ε Turbulence Model for a Wave Breaking Simulation. Water. 2019; 11(11):2282. https://doi.org/10.3390/w11112282
Chicago/Turabian StyleCannata, Giovanni, Federica Palleschi, Benedetta Iele, and Francesco Gallerano. 2019. "A Modified k – ε Turbulence Model for a Wave Breaking Simulation" Water 11, no. 11: 2282. https://doi.org/10.3390/w11112282
APA StyleCannata, G., Palleschi, F., Iele, B., & Gallerano, F. (2019). A Modified k – ε Turbulence Model for a Wave Breaking Simulation. Water, 11(11), 2282. https://doi.org/10.3390/w11112282