1. Introduction
Infiltration is defined as the water movement from the ground surface into the soil [
1]. The rate of water flow through the soil is directly related to many hydrological processes: ground water recharge, water supply to plants, heat and solute transport, erosion and runoff [
2]. In addition, the infiltration is controlled by several factors: soil texture and structure, initial water content, rainfall or irrigation application rates, etc. [
3]. This has made the description of water flow in the vadose zone, which is quite difficult as compared to the saturated zone [
4], one of the challenging tasks that modelers may face when developing hydrological models.
Modeling the infiltration process has gained great interest from soil and water scientists [
5]. Several infiltration models exist in the literature that exhibit different levels of accuracy. These models are usually based on Richards’ equation [
6,
7], which provides an appropriate tool to describe the infiltration process with a detailed description of the flow and water distribution within the soil profile [
8]. Numerical solutions based on finite difference, finite element or boundary element techniques [
9] have been used to solve Richards’ equation. Due to the non-linearity of the described process as well as the high soil hydraulic parameters requirements, the use of numerical solutions is considered as time consuming with some stability problems [
8]. Despite the progress made for developing efficient numerical schemes joined with faster computers, the use of such numerical methods is still time consuming when implemented for large study areas [
10].
On the other hand, because of the limitations of commonly implemented numerical solutions, numerous simplifications have been suggested to model the infiltration process. Accordingly, various classification criteria of infiltration models exist [
11]. These models are commonly categorized into empirical, semi-empirical and physically based [
12]. Empirical models are formulated as a simple equation, derived from actual field measured infiltration data through curve fitting [
11]. Examples of these models are: Kostiatov [
13], SCS-CN (US Department of Agriculture Soil Conservation Service, [
14]), Huggins and Monke [
15], Collis-George [
16], etc. Many existing hydrological models in the literature are based on these empirical models, in particular the SCS-CN such as ANSWERS [
17], EPIC [
18], SWAT [
19], etc.
Many semi-empirical or approximate models exist such as Philip [
20], Smith and Parlange [
21], Green and Ampt [
22], etc. These models allow a simplification of this process through some assumptions made either for soil hydraulic properties or for the boundary conditions [
7]. Approximate solutions of Richards’ equation are restricted by some conditions of application, for example: ponding surface, dry profile, constant diffusivity or constant water flux in the surface [
23]. On the contrary, numerical solutions have been considered as more efficient to solve the Richards’ equation under different field conditions [
24].
Recently, a new fast non-iterative solution for the non-linear 1D Richards’ equation has been proposed by Ross [
10]. Several researchers have considered Ross solution as a numerical solution [
10,
23,
24]. This solution allowed overcoming the limitations of other commonly used numerical solutions [
23]. Ross model performances have been tested against several models. Varado et al. [
23] assessed the efficiency of Ross model by comparing it at a first step with two analytical solutions and at a second step with SIPAT model. The results of this study showed that Ross solution [
10] is a robust and accurate solution while a finer discretization is required close to soil surface to improve the results of cumulative infiltration. Crevoisier et al. [
24] compared within their study the Ross model with a finite element based Hydrus 1D model to evaluate the accuracy, computing time and convergence quality. This comparison was carried out considering different soil types, different initial water content and grid types. Results of this study showed that Ross model gave better results than Hydrus 1D model in terms of simulation quality and computing time while this latter presented some convergence problems. Recently, Tinet et al. [
8] developed a decision tool based on Ross solution. The model proved good efficiency as compared with the TEC model [
25] with 90% agreements in the results. Adding to that, Ross model can provide good results under large temporal and spatial scales [
24]
The advances in developing sophisticated models and the implemented procedures for model parameterization obviously increased models simulations accuracy [
26]. Nevertheless, the suitability of these models for real world conditions should be assessed [
12]. The evaluation of model performances is based on the estimate of closeness of model simulations to observations [
27]. The inter-comparison of different models allowed affirming their points of strength and weakness [
28]. The selection of the equation to be implemented to describe a given process within a model can influence the results of model simulation. Hence, this step should be carried out carefully to limit uncertainties, originating from a process representation, on model predictions.
The current study aims at assessing the effect of infiltration process modeling on soil water content simulations accuracy for irrigation water management. To this aim, different infiltration models were included within the FEST-WB (Flash Flood Event-based Spatially-distributed-rainfall-runoff Transformations-Water Balance), a distributed hydrological model developed at Politecnico di Milano since 1990. As a first step, Green and Ampt (GA), Philip and the modified curve number (SCS-CN) were included within FEST-WB. Then, Ross model was implemented using Brooks and Corey [
29] and Van Genuchten [
30] soil water retention curve models. For this study, we limited our focus to a homogeneous soil profile.
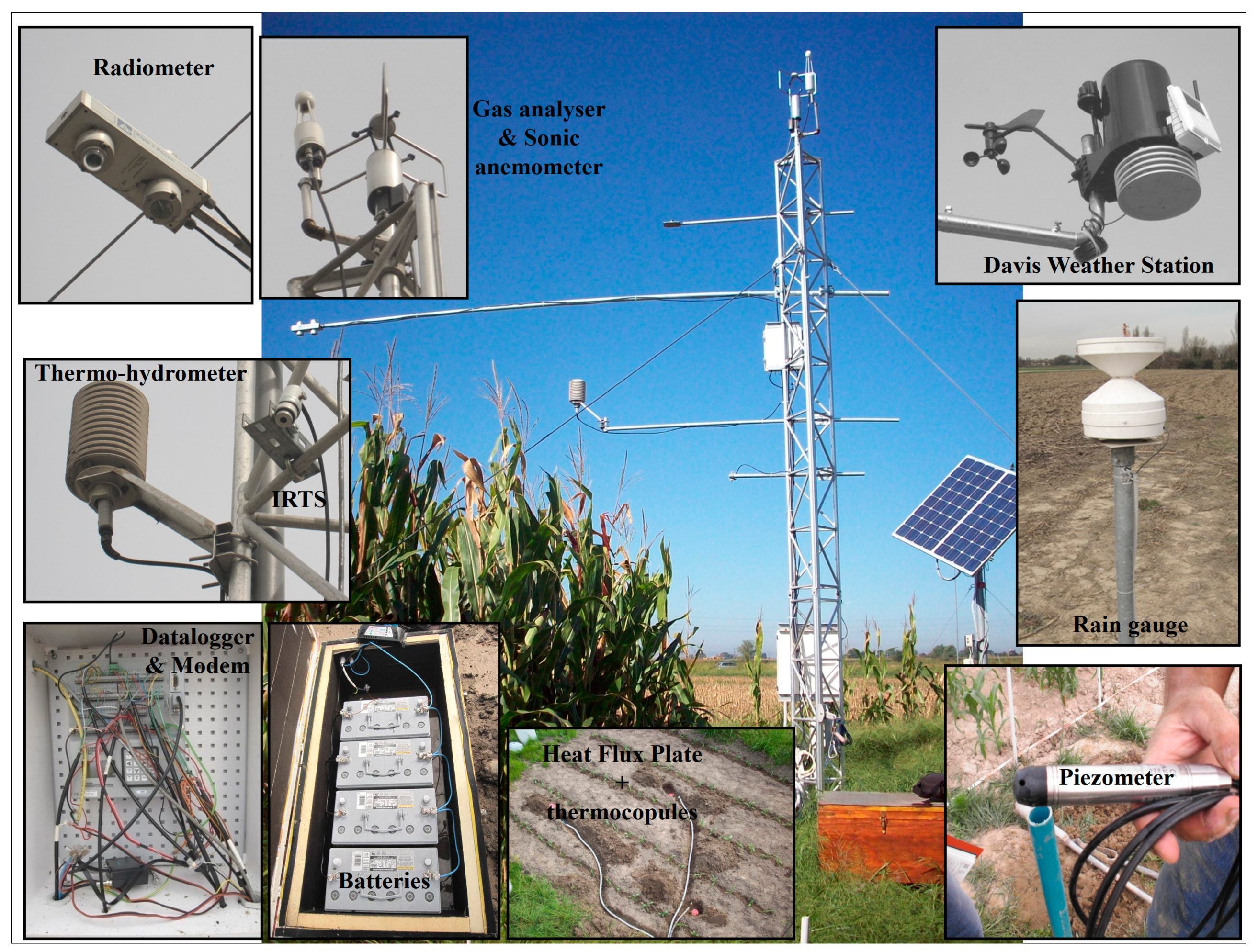
The first objective of this study was therefore to identify the most important parameters governing infiltration process within the different implemented models through a performed sensitivity analysis. The second objective was to evaluate the performances of implemented models against observations acquired in the experimental study site, an agricultural field, where soil water content was monitored together with continuous measurements of meteorological data. The third objective was to assess the effect of the selection of different infiltration models on the results of evaluation of an implemented irrigation scheduling.
4. Conclusions
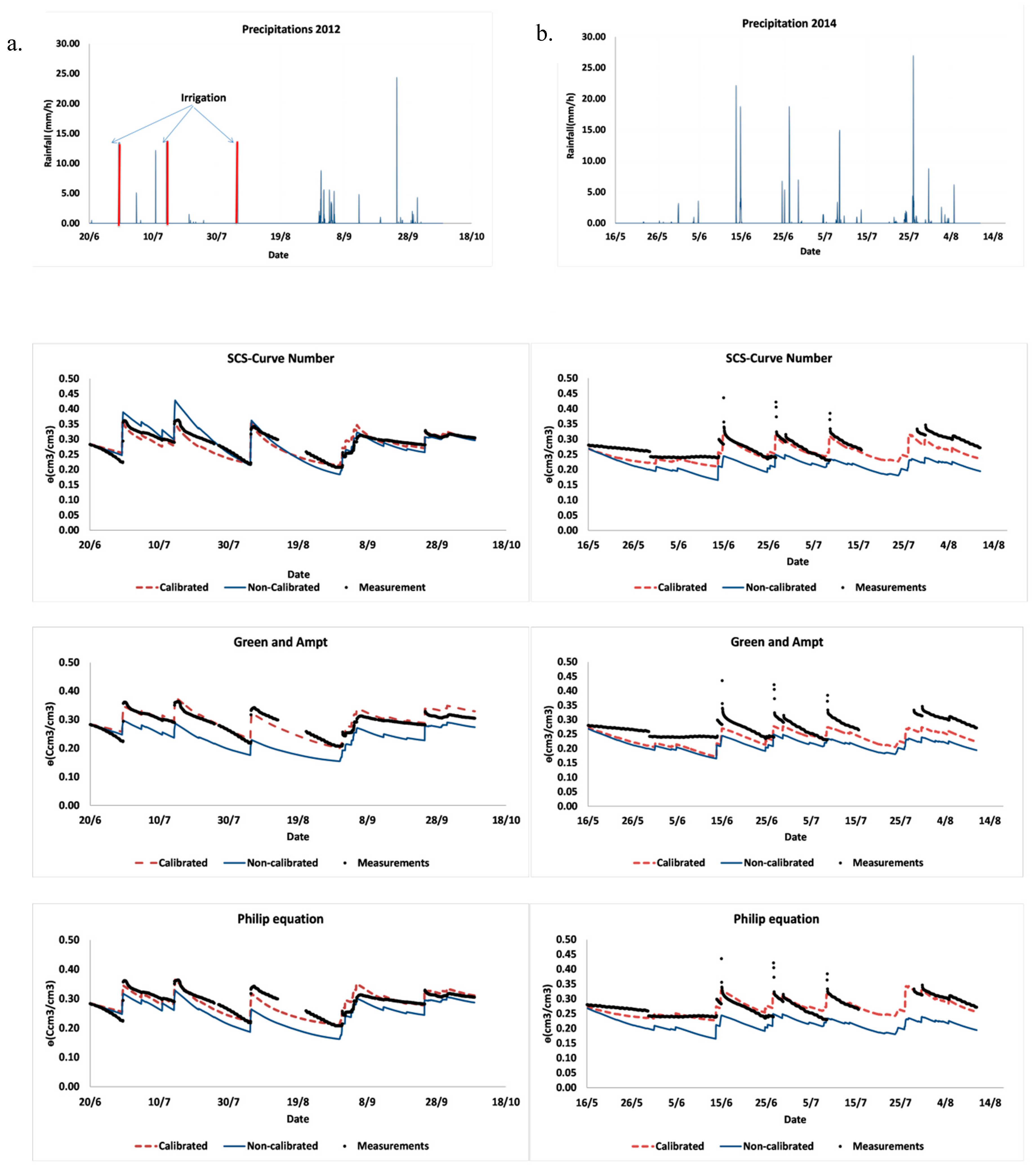
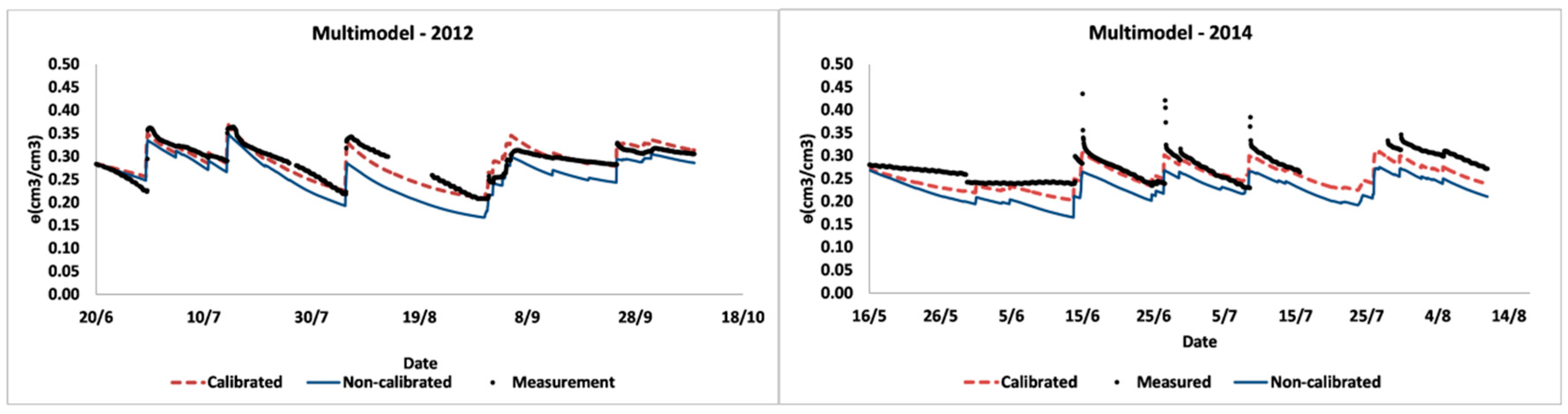
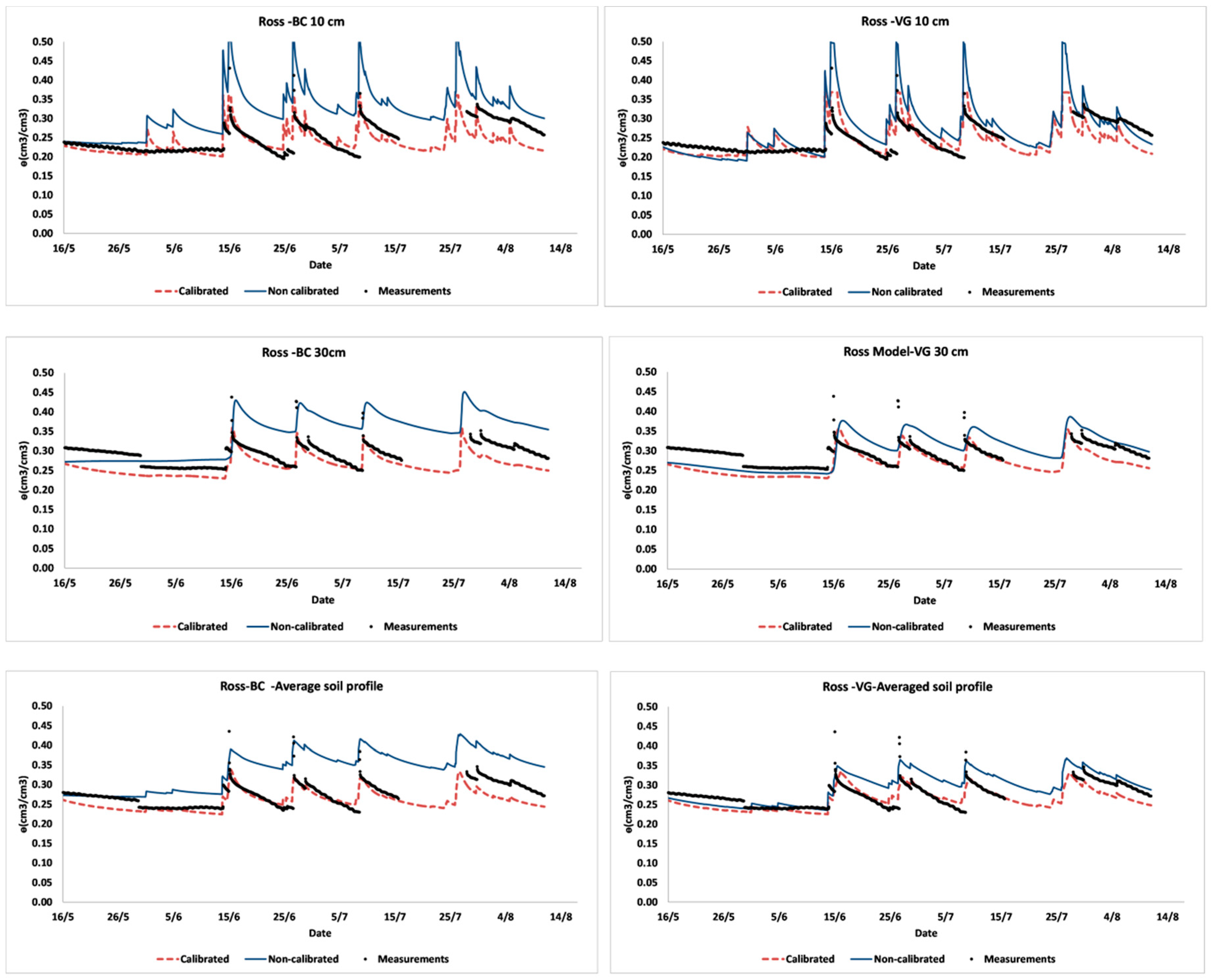
This study dealt with parameter sensitivity and performances of different implemented infiltration models within the FEST-WB model. The simulations were carried out under similar modeling conditions: rainfall, soil, vegetation, etc. The differences in the soil moisture simulations were only due to difference of the models used for the infiltration calculations. The accuracy of soil moisture simulations based on different infiltration models has been evaluated against field measurements. The accuracy of numerical solutions of Richards’ equation, as well as analytical solutions, highly depends on the quality of input data, which are the hydraulic conductivity and water retention curve parameters. Tested analytical solutions gave good performances as compared to field measured soil moisture; a good calibration has great importance for improving these performances. Implementing different equations for infiltration simulation within the same model allowed the implementation of a multimodel ensemble approach based on simple averaging of outputs of different simulations based on different infiltration models. This approach allowed reducing simulation uncertainty even without calibration.
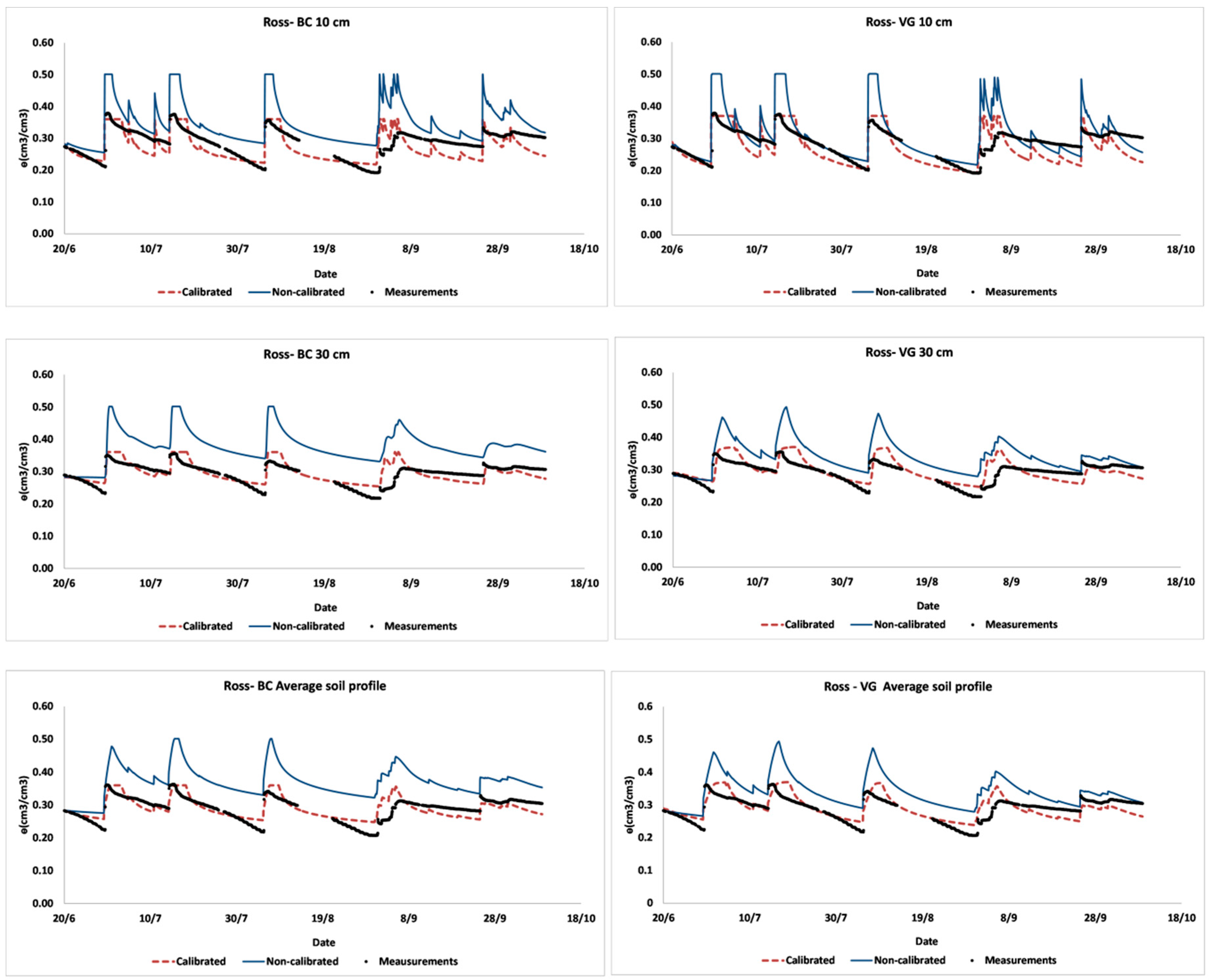
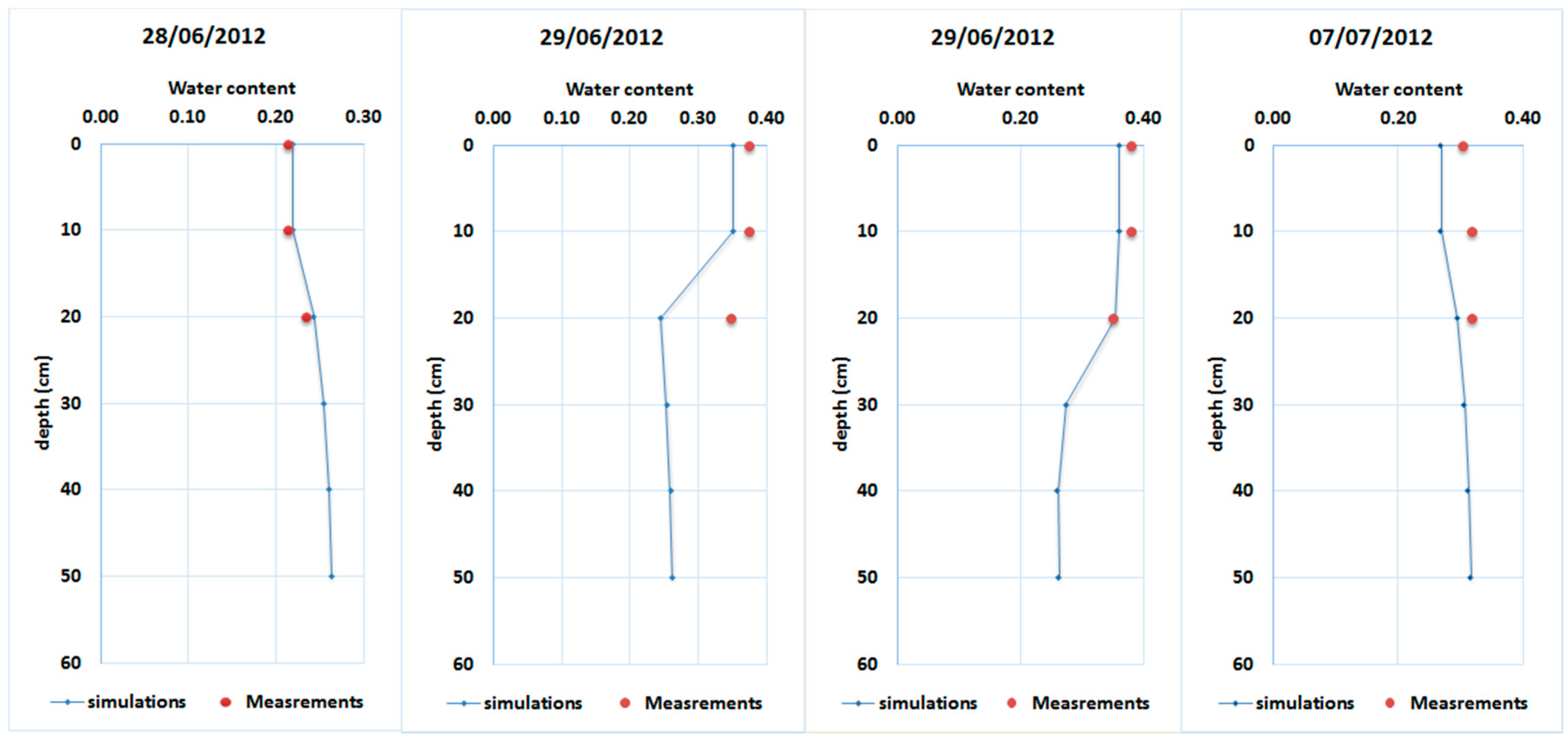
Ross solution gave different performances for soil moisture at the monitored points of 10 cm and 30 cm, which highly depends on the quality of input parameters. Lower accuracy was achieved for the top soil layer that is more subjected to fluctuations of water contents and to disturbance during the cropping season. Knowing the water content at different depths of the soil profile is crucial when implemented for irrigation management. Ross solution gave the possibility to follow the soil moisture variability within the soil profile, which is highly recommended in particular for the case of localized irrigation practices. For this study site, good overall agreement between field measured and simulated soil moisture was achieved when analytical infiltration models or physically based Ross solution were used.
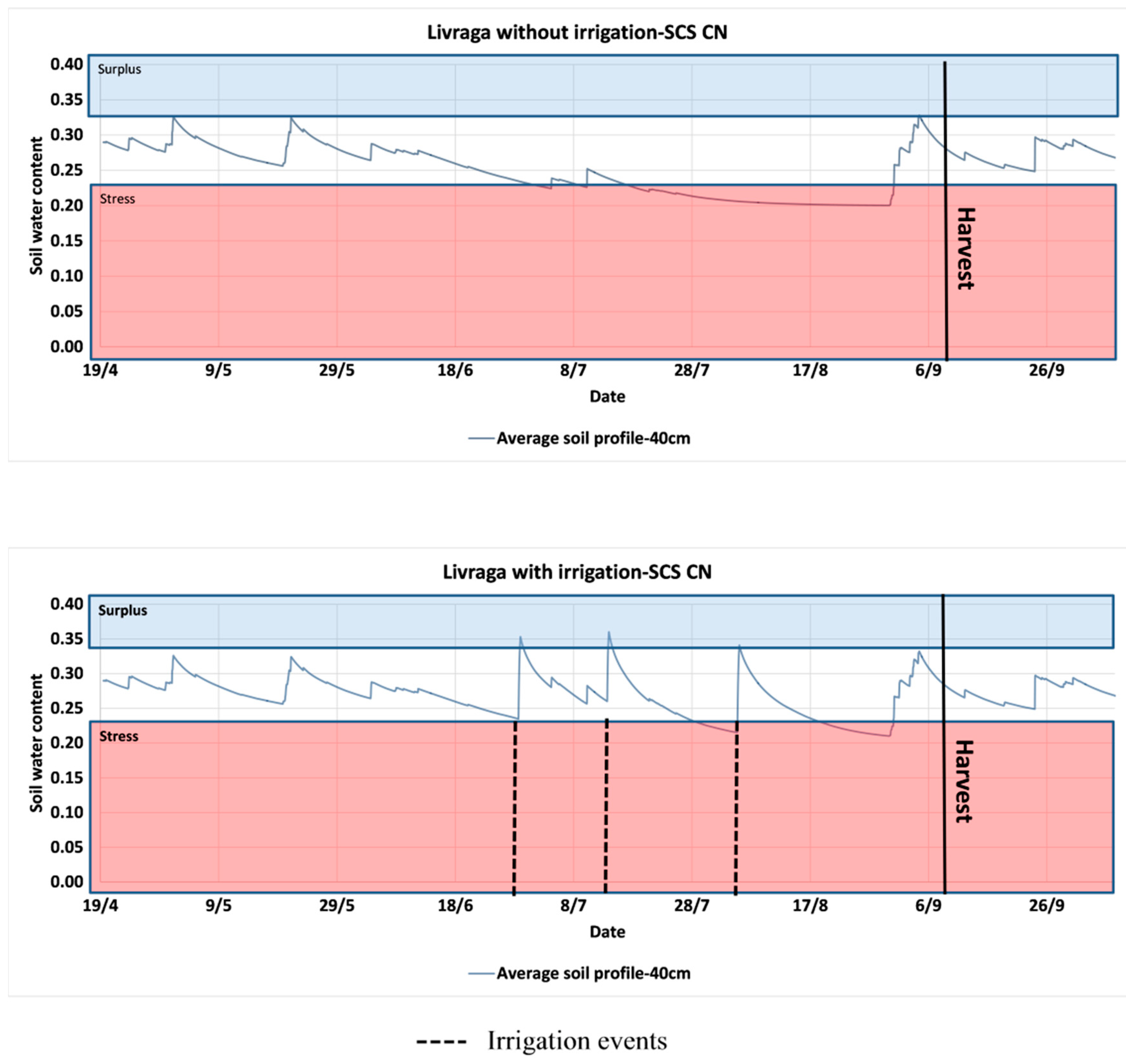
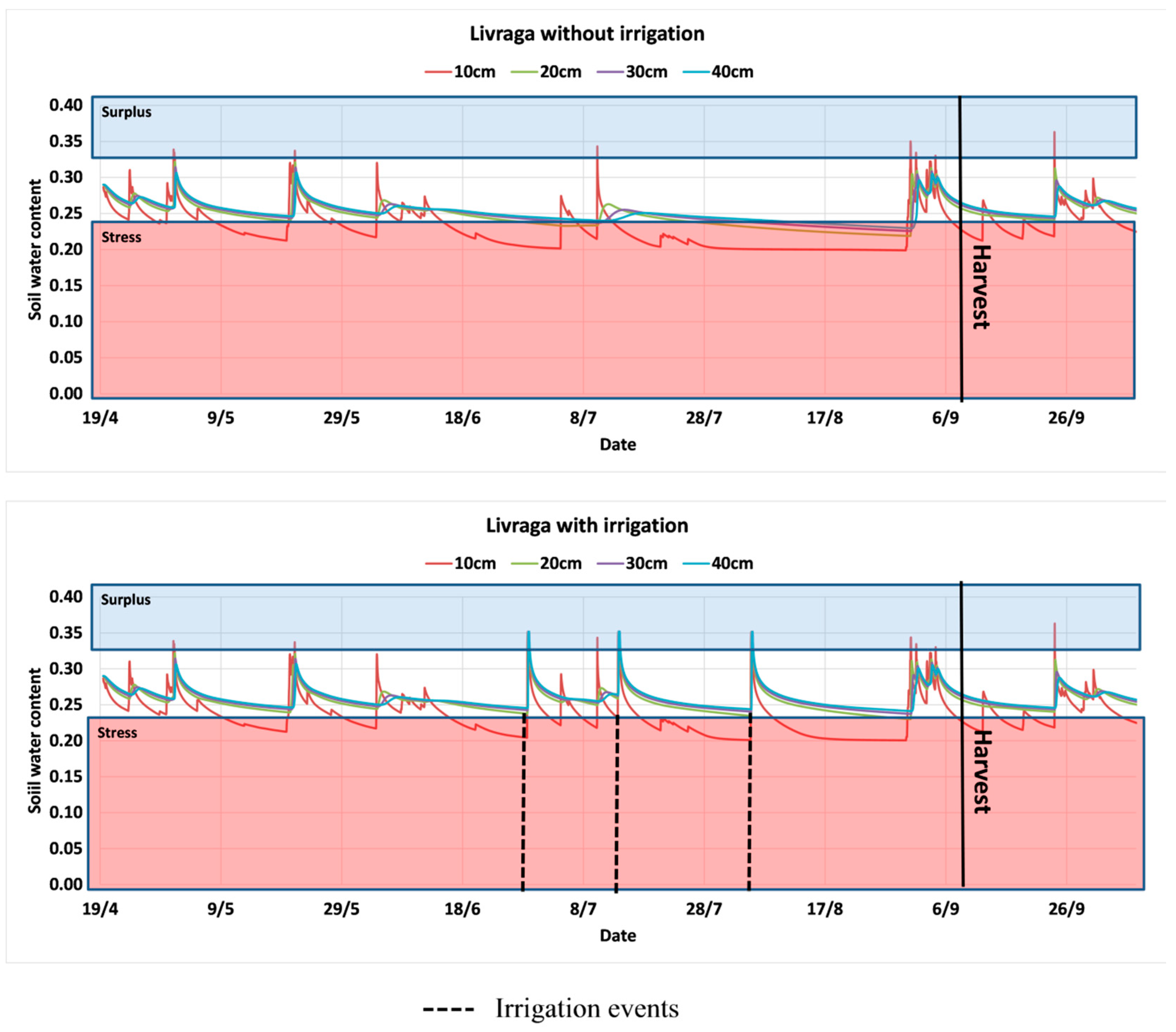
Determining the irrigation timing and the amount of water to satisfy the plants requirements is very complicated. About on demand irrigation schemes, deciding when to start the irrigation has always been a challenging task. It can be concluded from performed analysis that decision of the farmer cannot always guarantee reaching optimal and efficient irrigation scheduling. A decision support tool for better management of water resources is highly recommended. Results of this study proved that the selection of the infiltration model for the simulation of the soil water movement and assessment of the occurrence of water stress conditions produced different results and different conclusions. The selection of the model to be used for such purposes should consider the degree of precision and the information required for a better management of irrigation water.
Further studies are required to assess the accuracy of different tested infiltration models under different field conditions. The limitation of the one at a time sensitivity analysis is that the interactions between the parameters cannot be considered. As a further step, global sensitivity can be implemented for a better understanding of these interactions.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}