
On the Implementation of a Regional X-Band Weather Radar Network

 ,
,  ,
, 
Abstract
:1. Introduction
2. The X-Band Weather Radar Network in Tuscany
2.1. Set Up of the Radar Systems
2.2. Real Time Operativity
3. Signal Processing
3.1. Reflectivity Computation
- λ is the wavelength of the transmitted signal carrier
- r is the distance from the radar to the observed volumetric cell
- l is the attenuation due to atmospheric gases (0.00835 dB/km in this study [17])
- lr is the weather signal power loss at the receiver caused by the finite bandwidth of the receiver, the radome, the circulator, and the transmission limiter (this parameter must be computed for each system during laboratory calibration)
- Pt is the peak power of the signal radiated by the radar
- g is the antenna gain (g2 assuming transmission and reception gains are equal)
- gs is the system power gain
- θaz and θel are the antenna beamwidths in azimuth and elevation axis respectively
- c is the speed of light
- τ is the pulse width
- KW is the water scattering coefficient (0.93 in this study [16] p. 36).
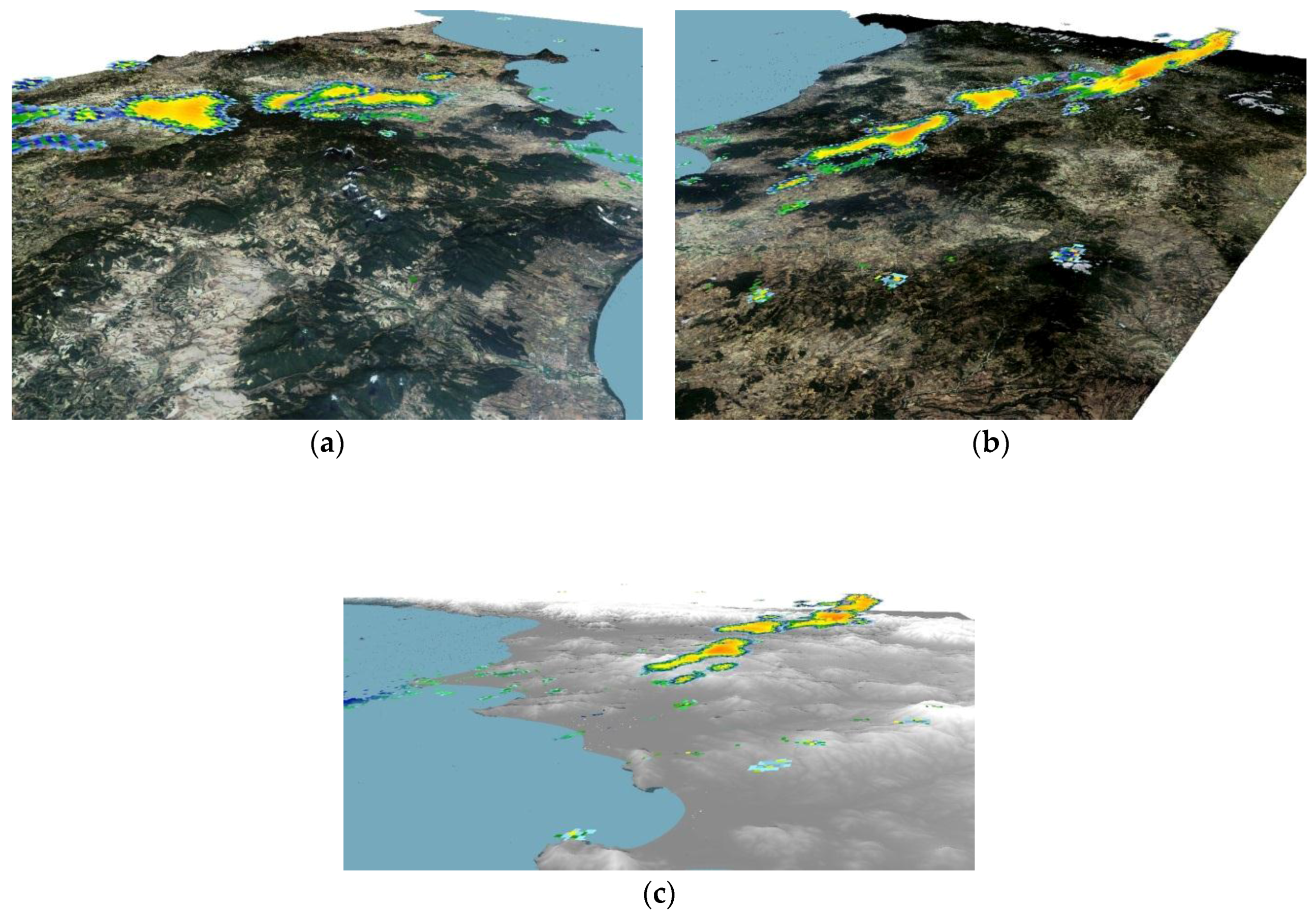
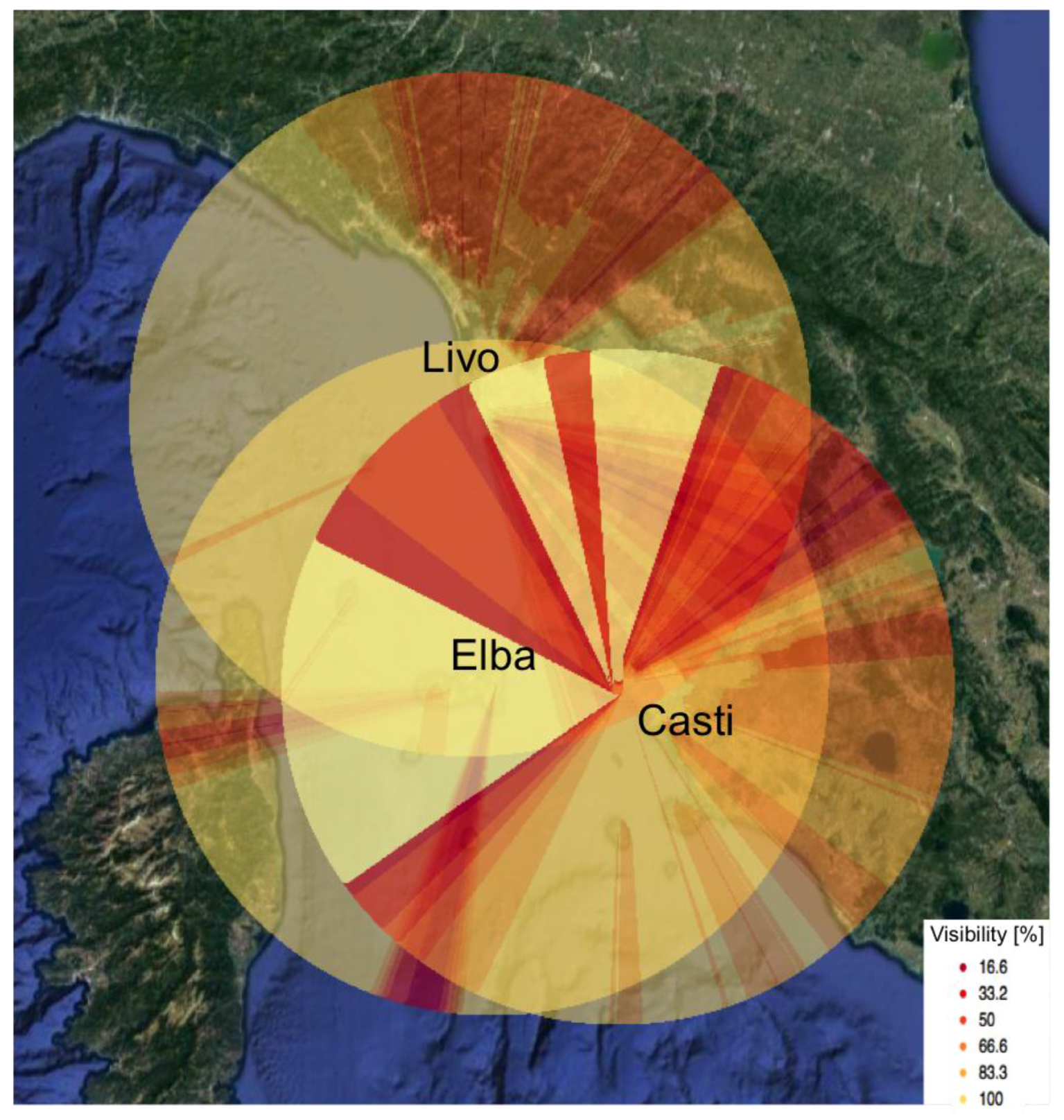
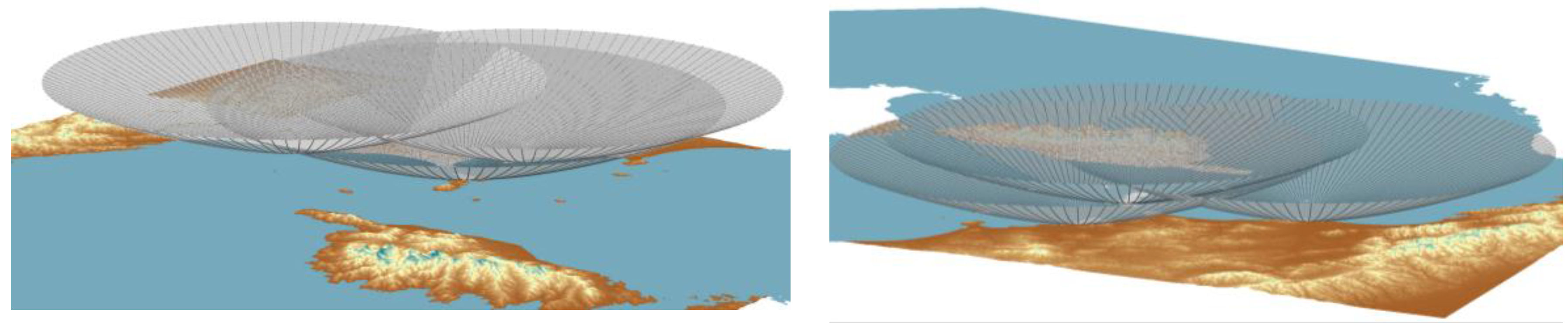
3.2. 3D Spatial Data Infrastructure
- H0—antenna height above sea level (m)
- r—range from the radar site (m)
- θ—elevation angle in degrees with 0° at the horizontal and +90° pointing vertically upwards from the radar
- re—spherical earth’s mean radius (m)
- ke—adjustment factor to account for the refractivity gradient that affects the radar beam propagation. In principle this is wavelength dependent. The default of 4/3 is a good approximation for most of the weather radar wavelengths.
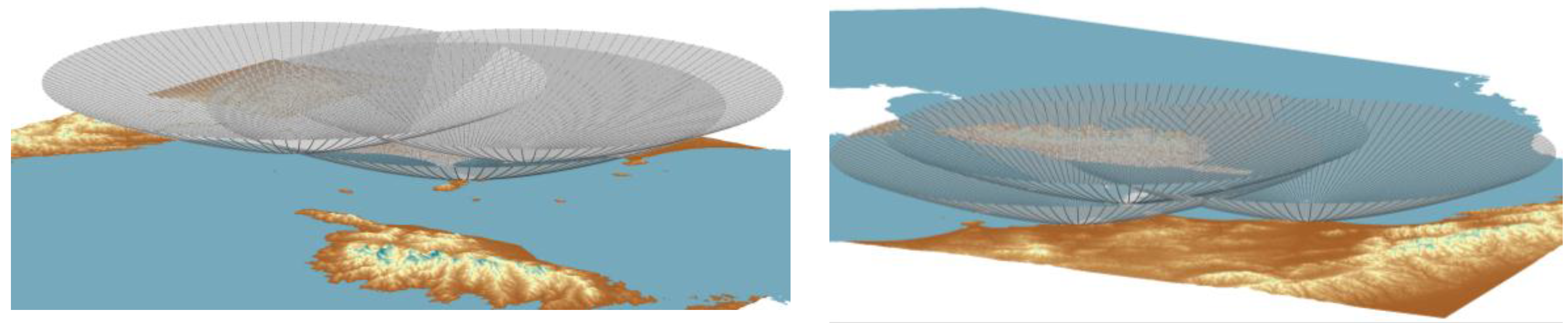
- A transformation of the PPI “standard mask” from a polar coordinate system (azimuth, elevation, range) to a Cartesian coordinate system (X, Y, Z). The “standard mask” was set up on a number of points related to the specific radar characteristics (e.g., azimuth, resolution, elevation, frequency, etc.). The volumetric cell number for each elevation is 14,400 × 240, and a corresponding 3D shapefile (with 3D Point Z geometry) has been created.
- A georeferencing of each radar system into a specific Spatial Reference System (SRS); in the present case ETRS89 UTM32N (EPSG: 32632) [19].
- A rigid translation of the standard mask points into the selected SRS. The approach is based on the Puiseux-Weingarten system [20] where, within a range of about 100 km, the planimetric projection from a spheroid (Equation (3)) is almost interchangeable with that of an ellipsoid (at the cartographic level). Regarding the third dimension (i.e., Z is the orthometric height), the assumption is that the geoid undulation is constant within the radar range (108 km).
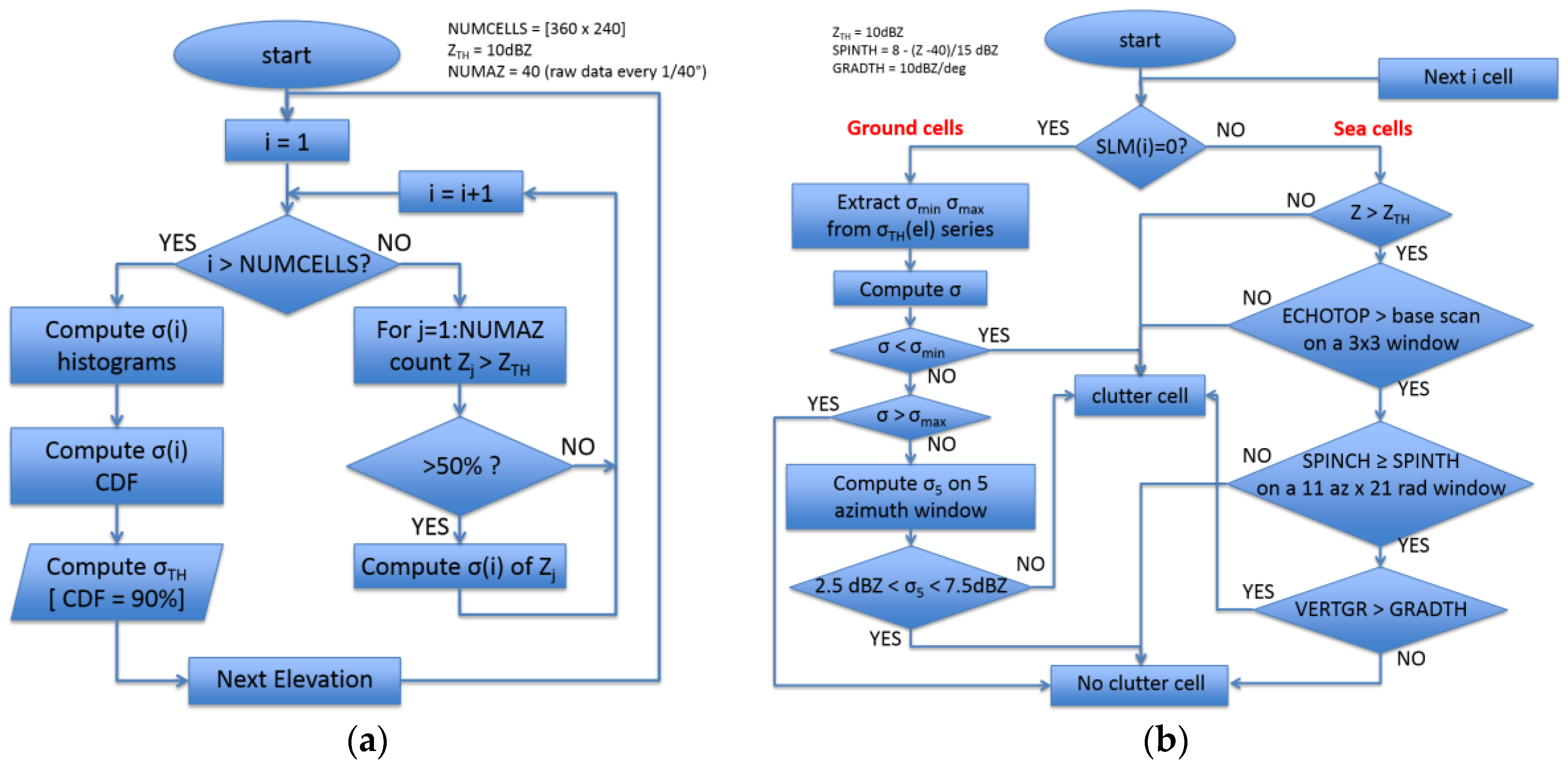
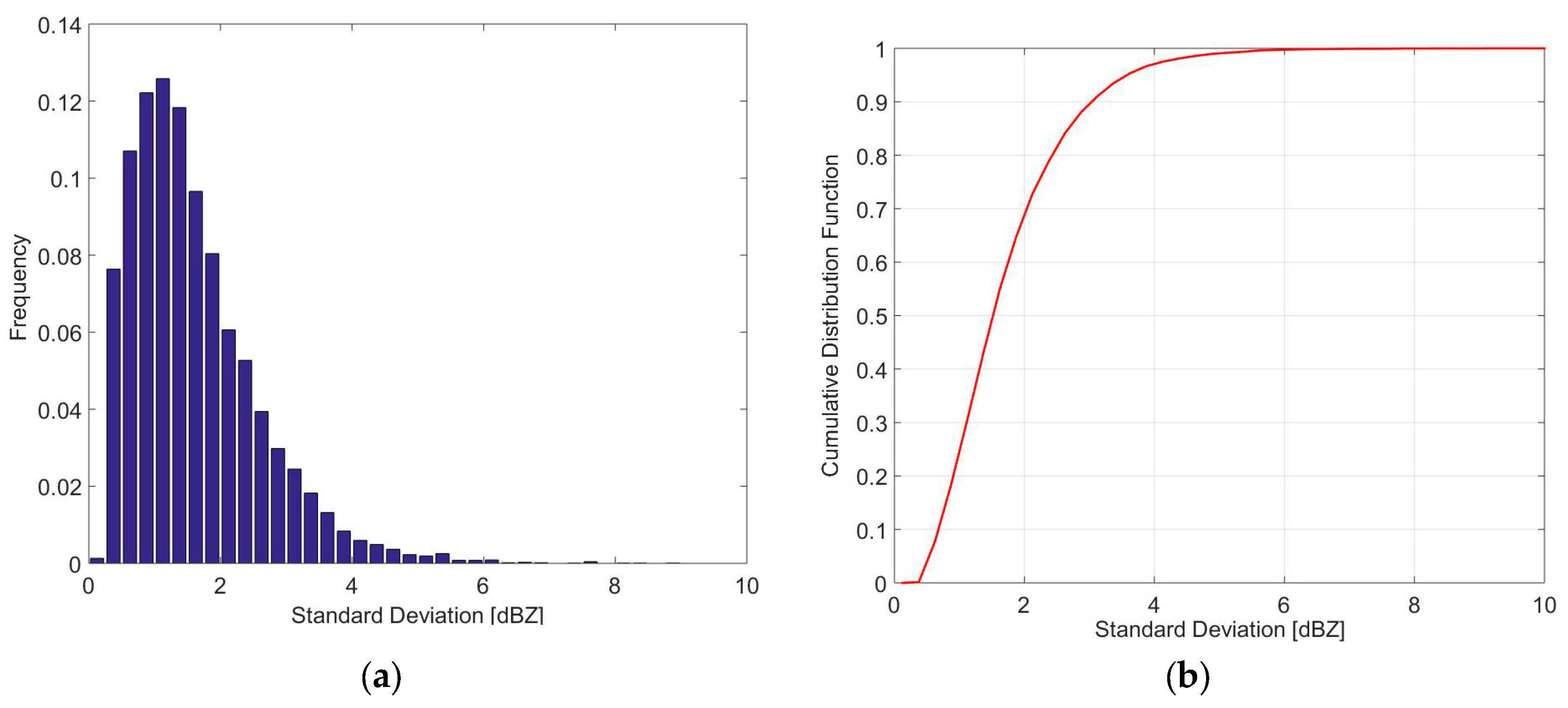
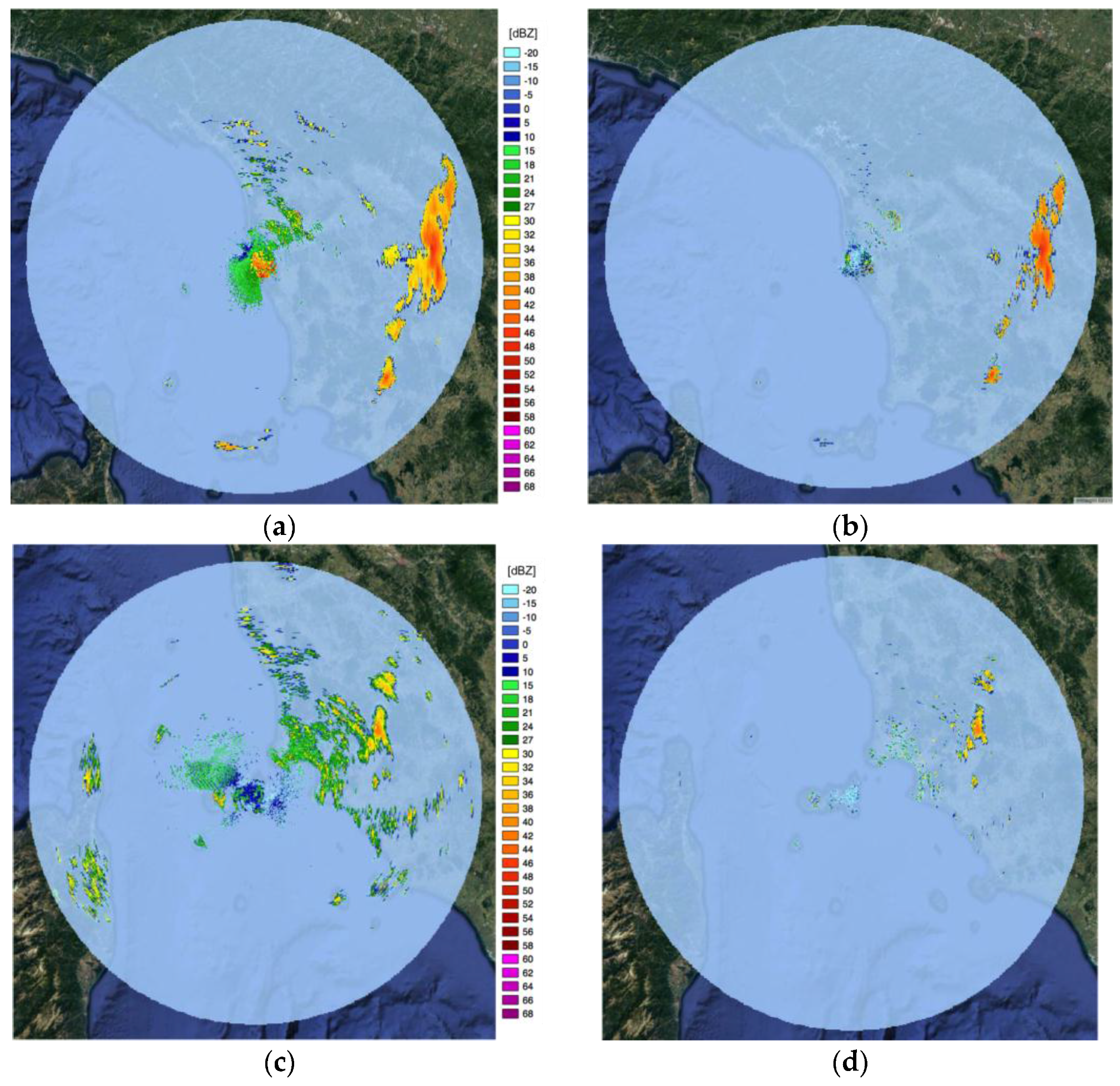
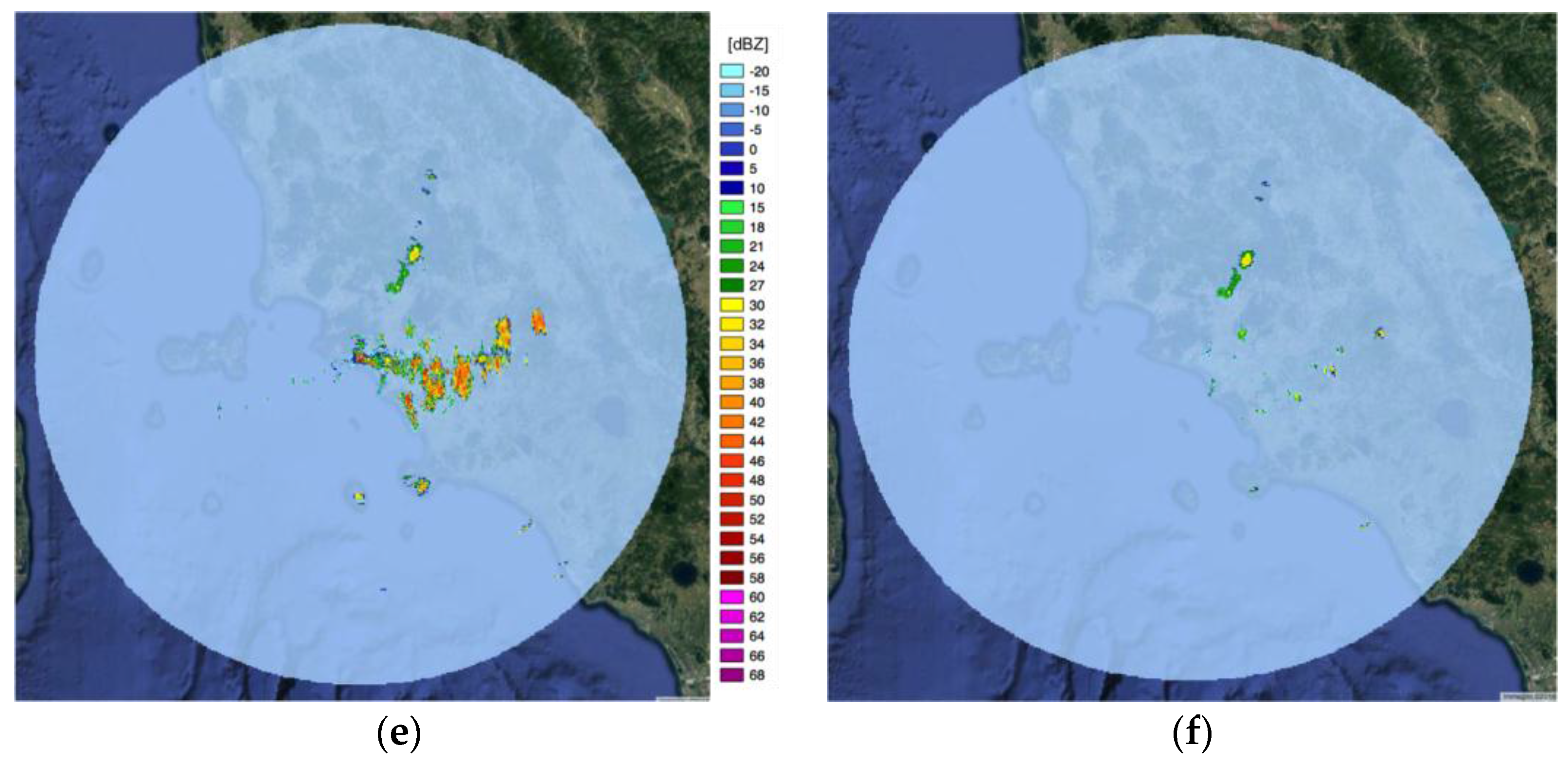
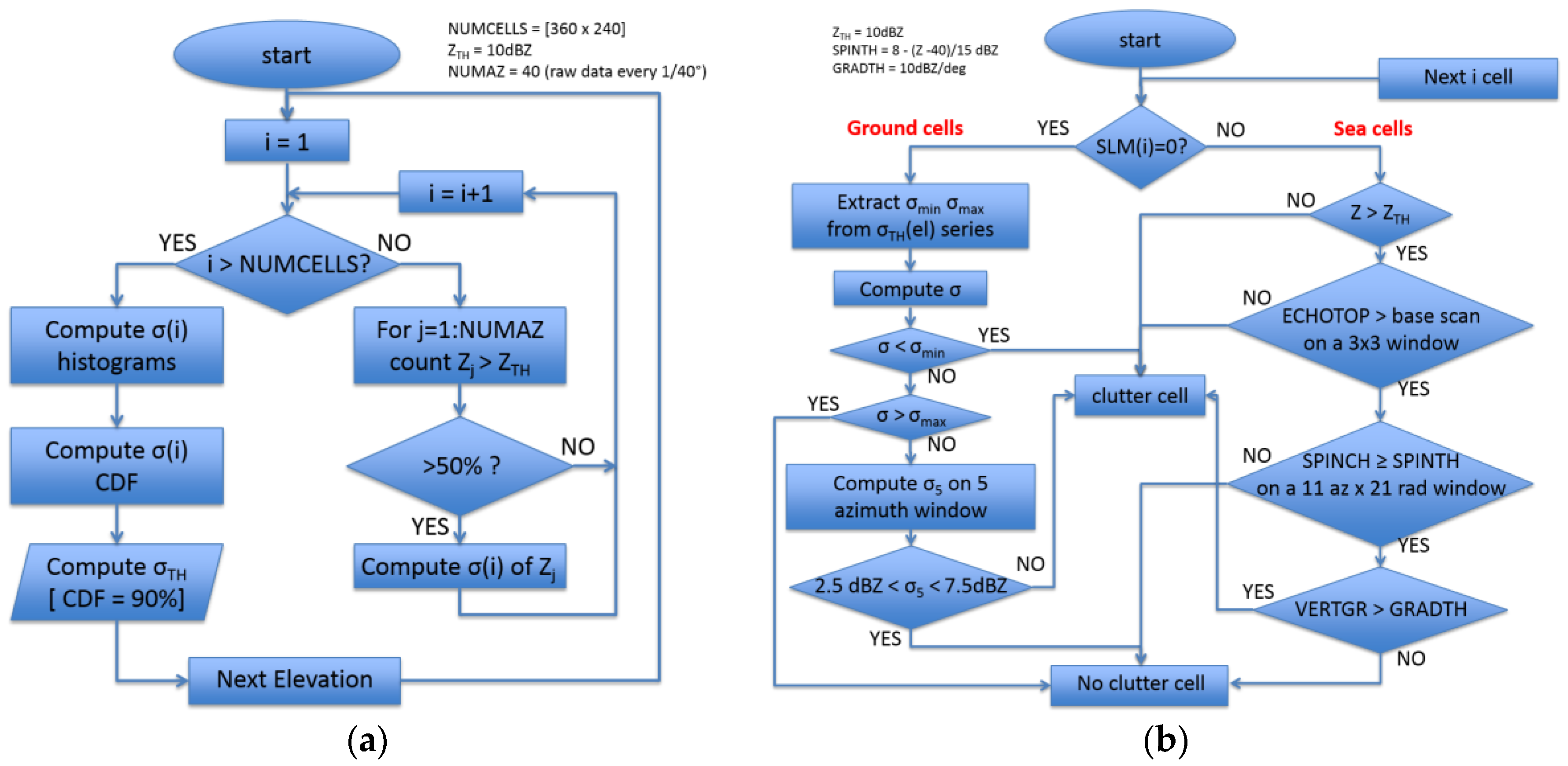
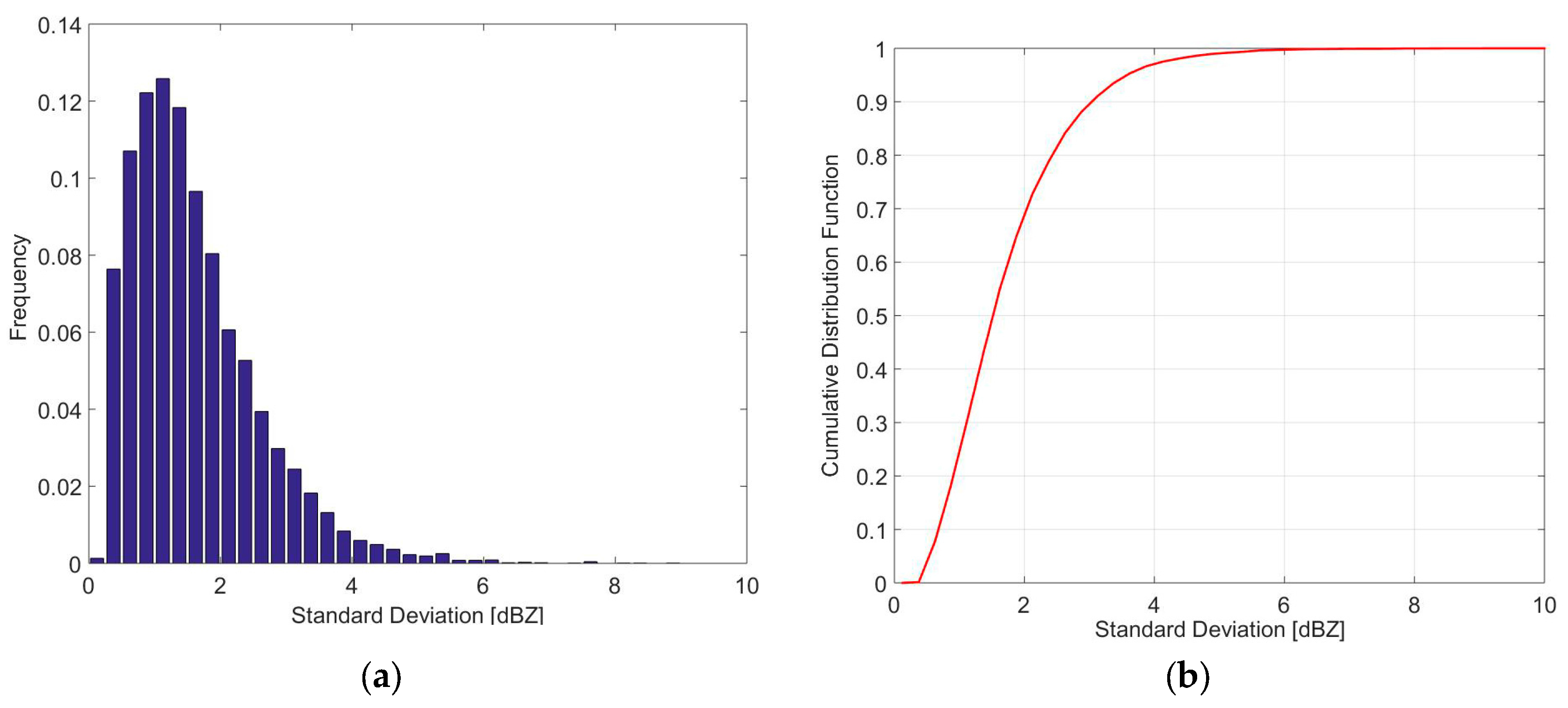
3.3. Sea and Ground Clutter Removal
3.4. Mosaic Implementation
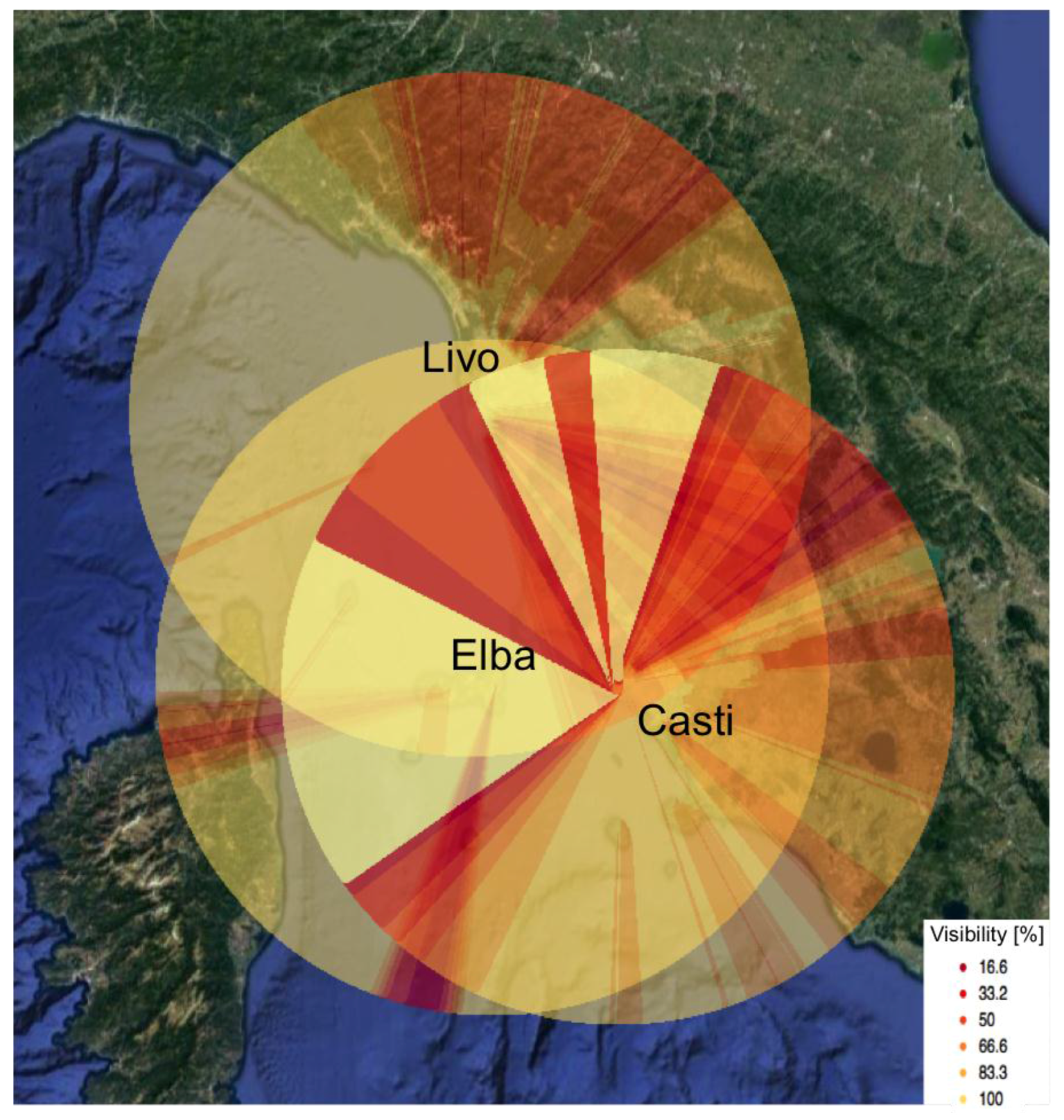
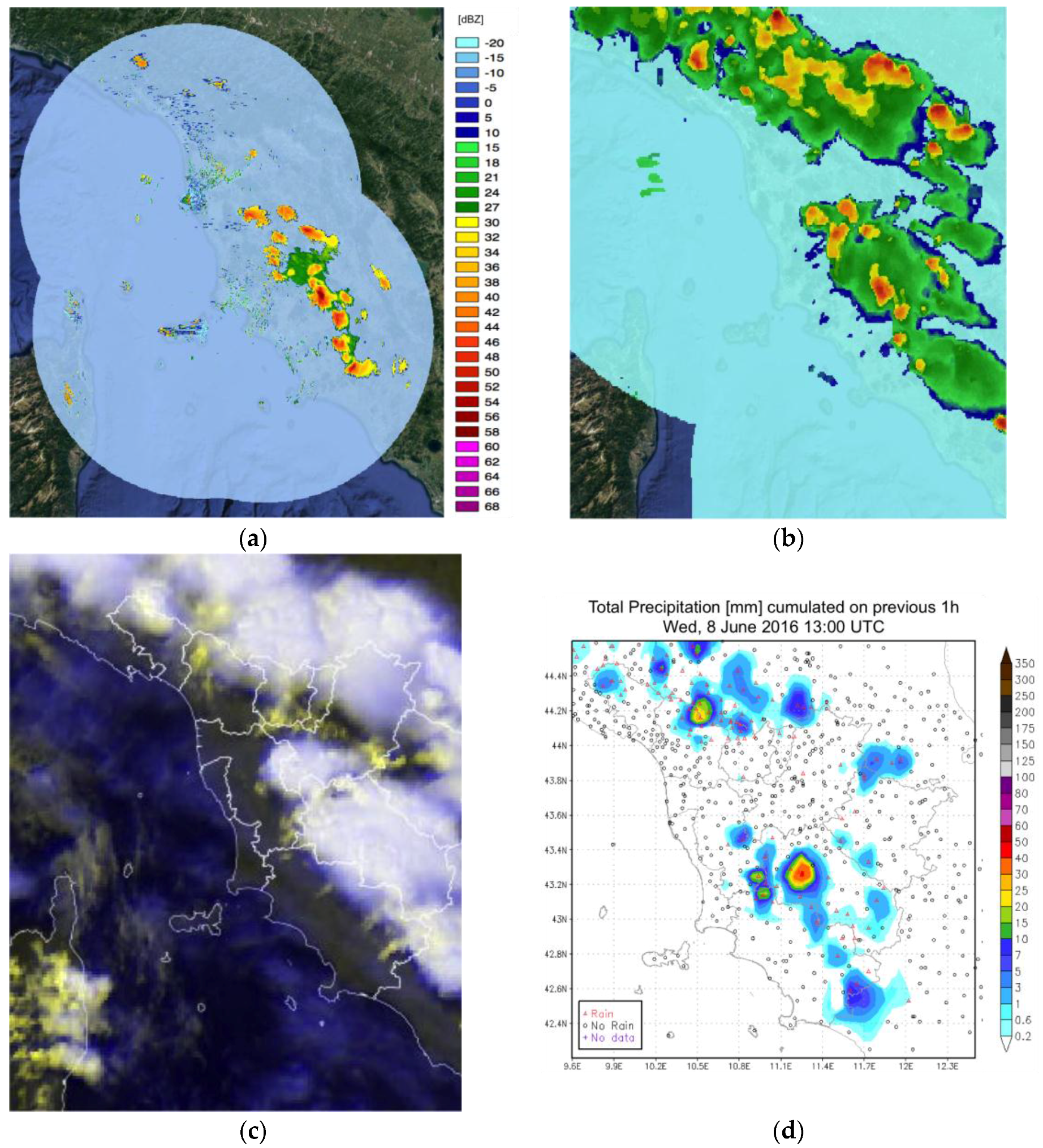
3.4.1. Radar Signals Preliminary Qualitative Evaluation
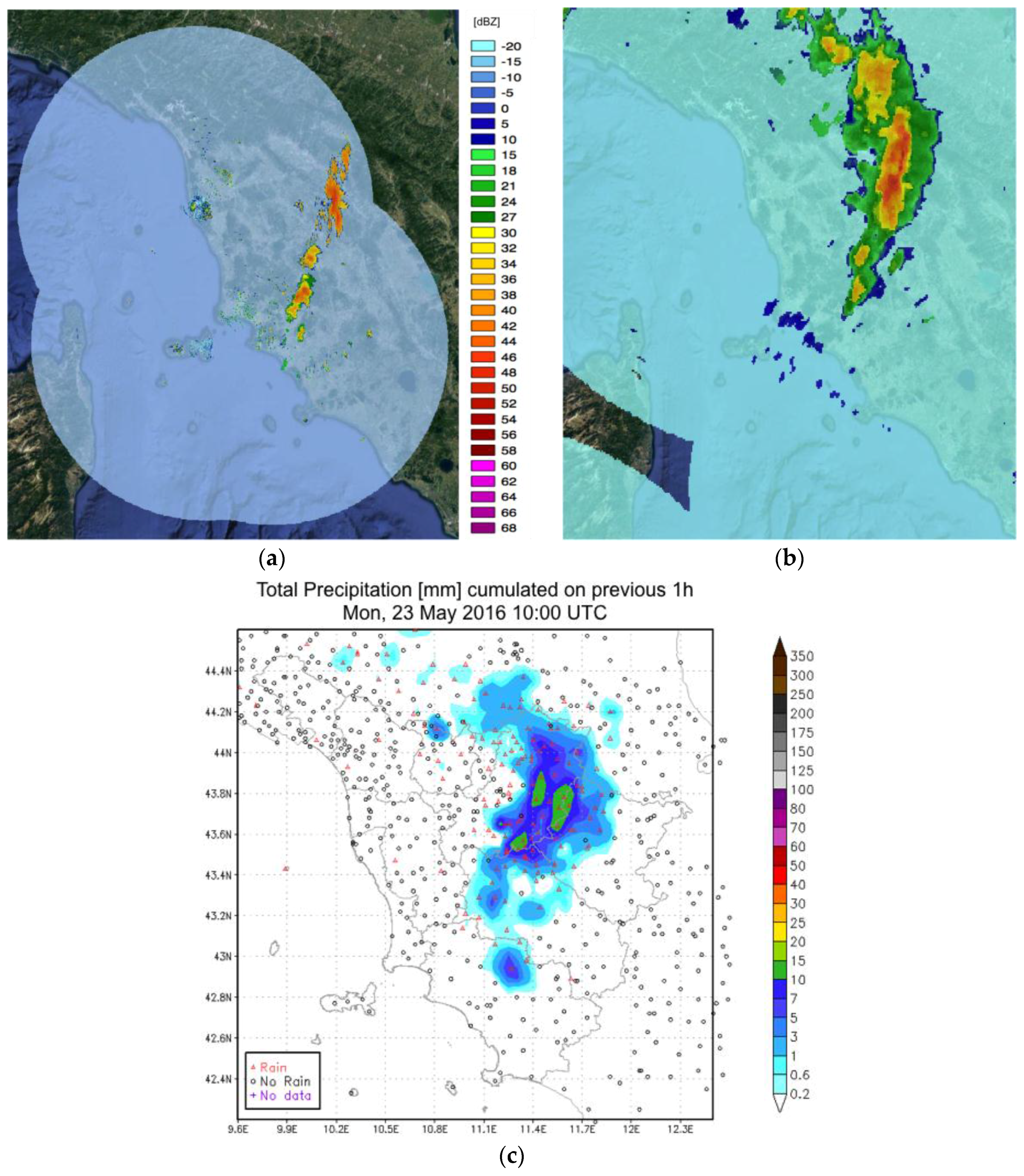
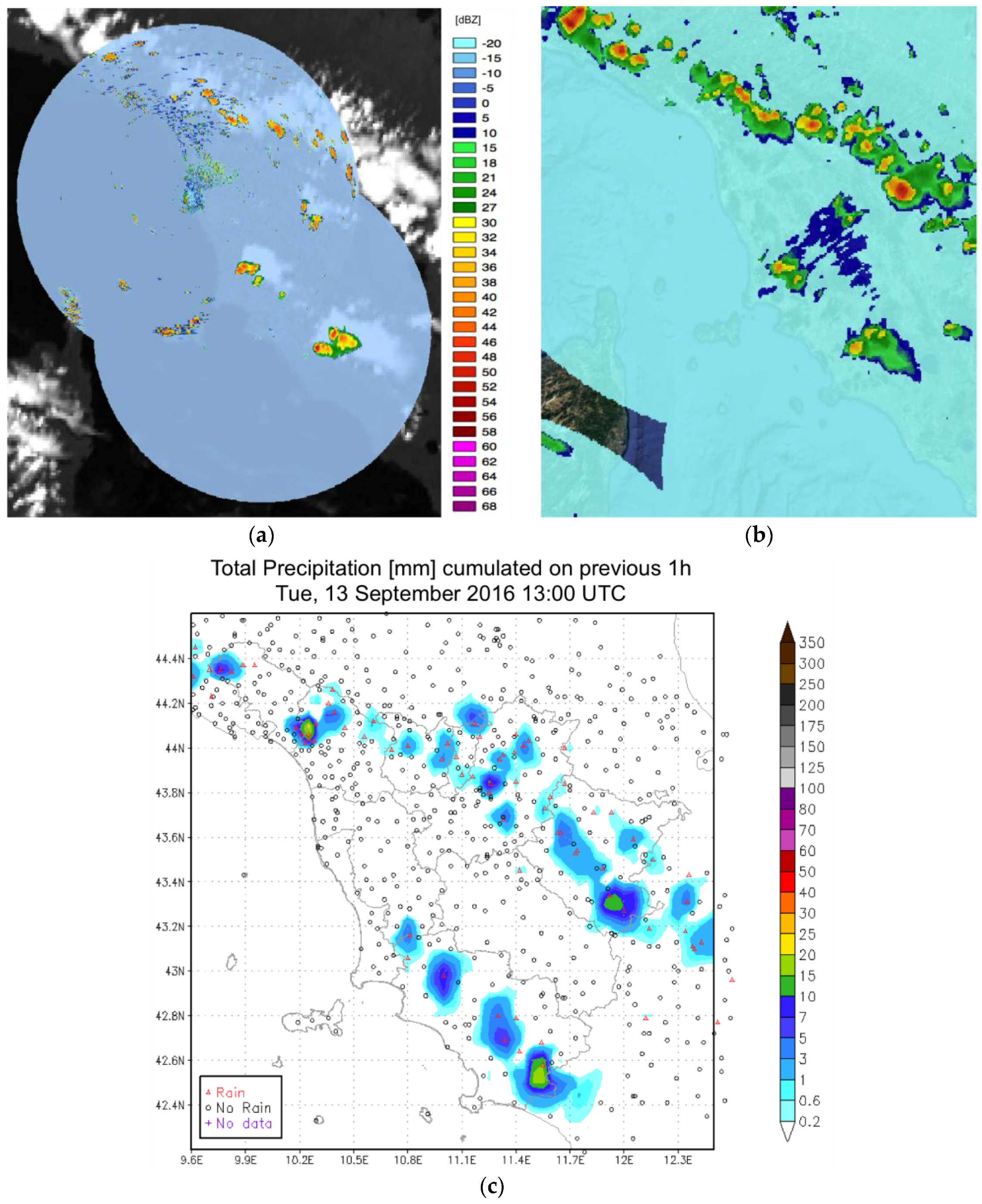
3.4.2. Radar Composite
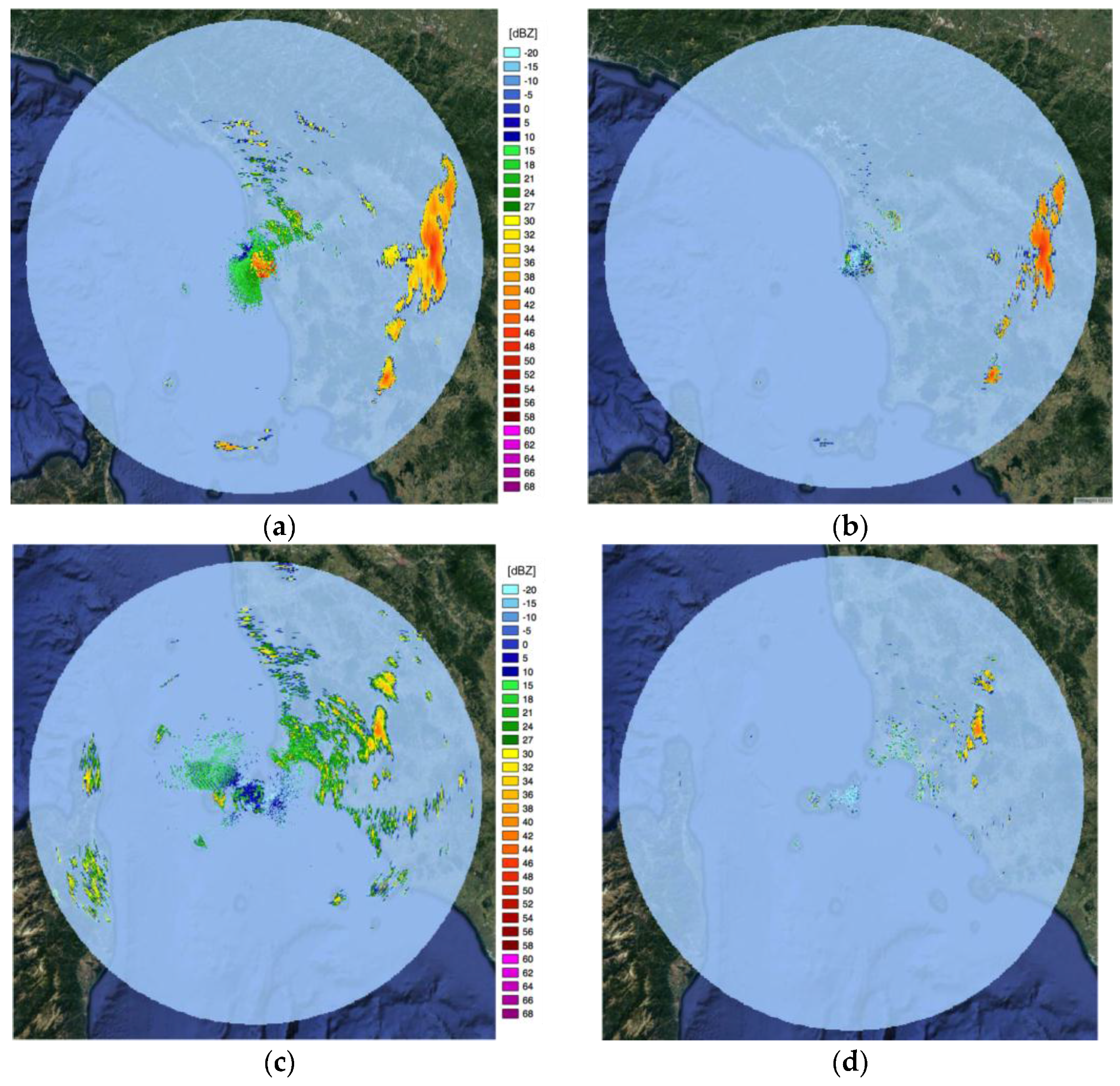
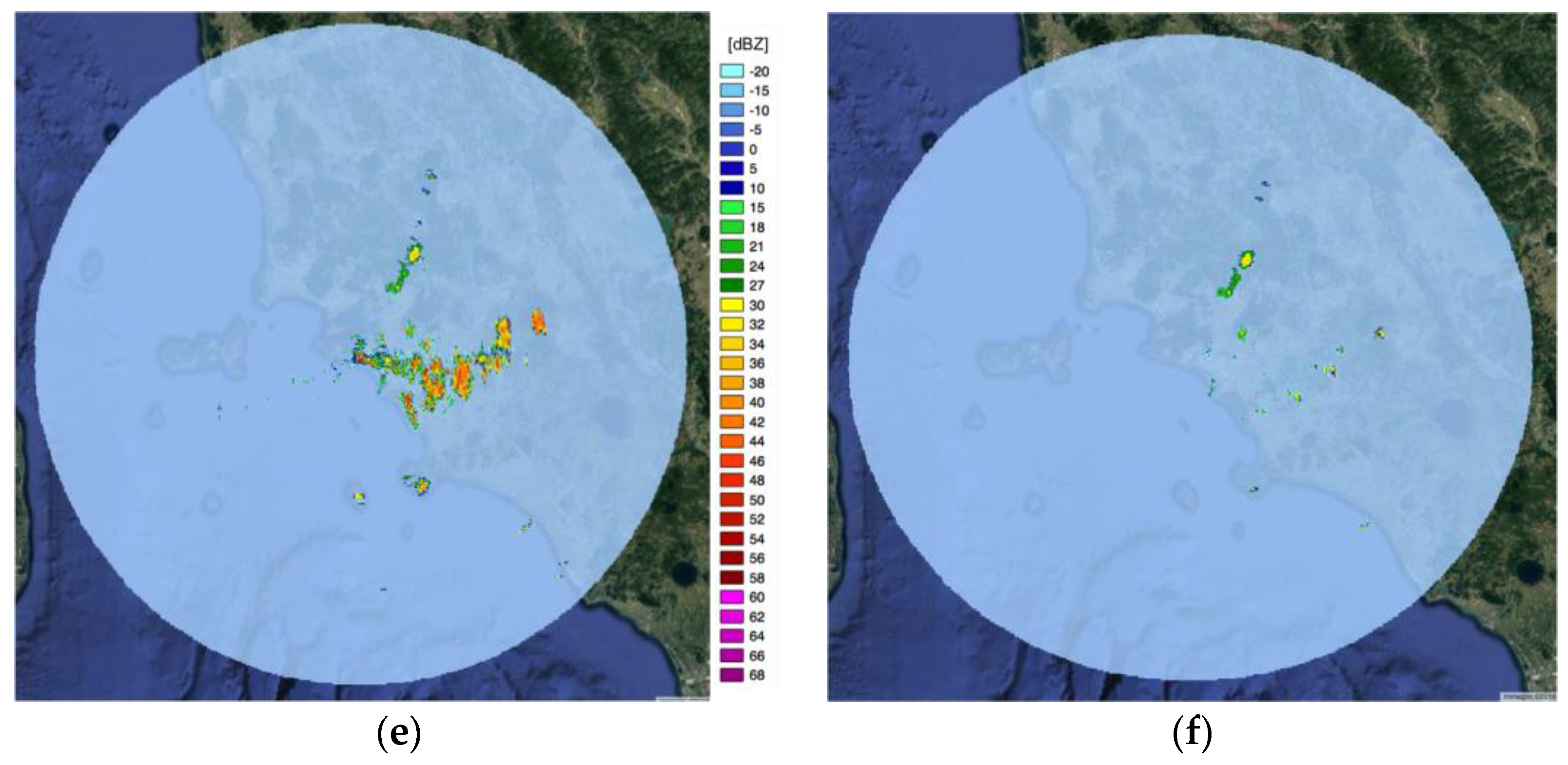
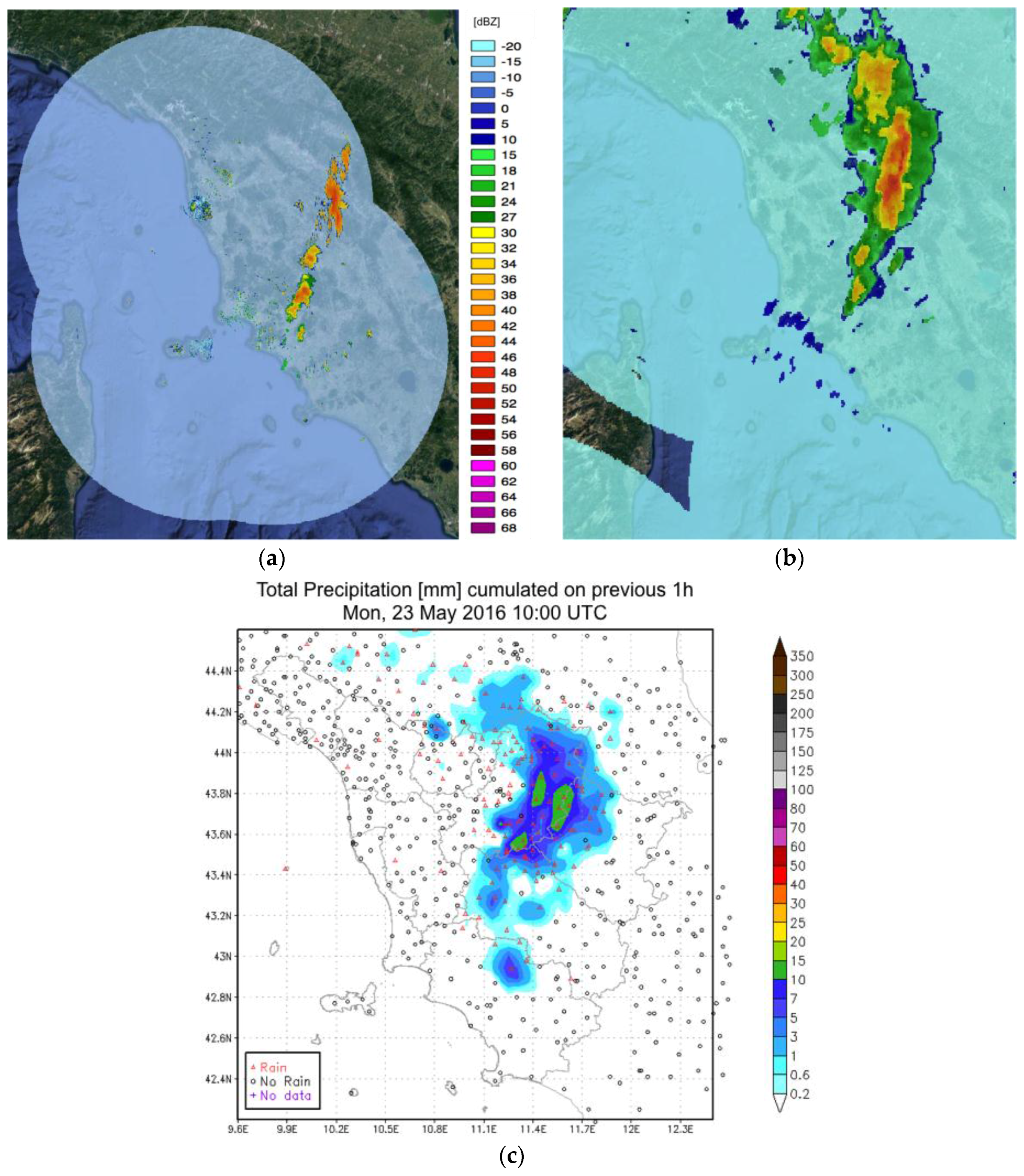
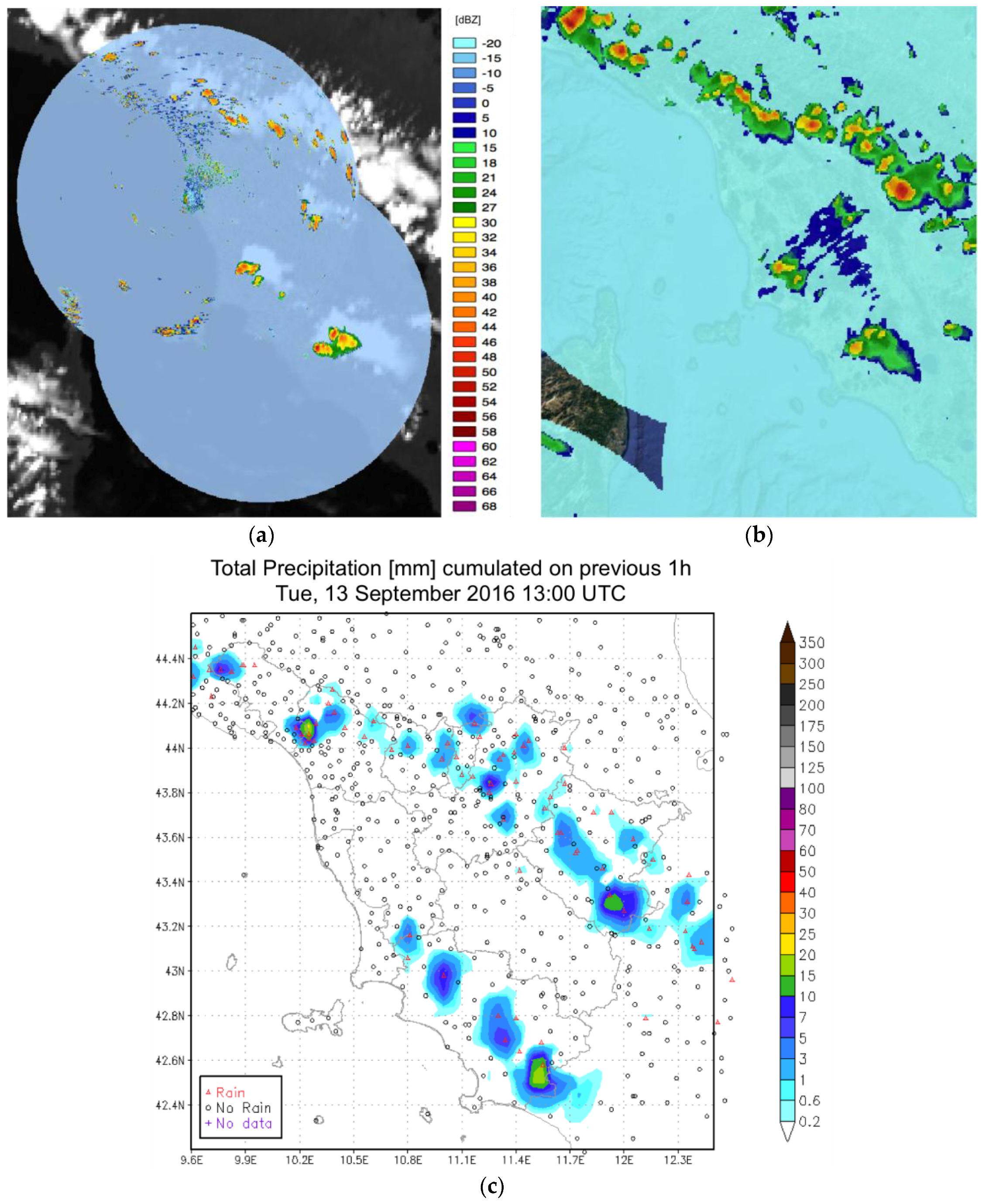
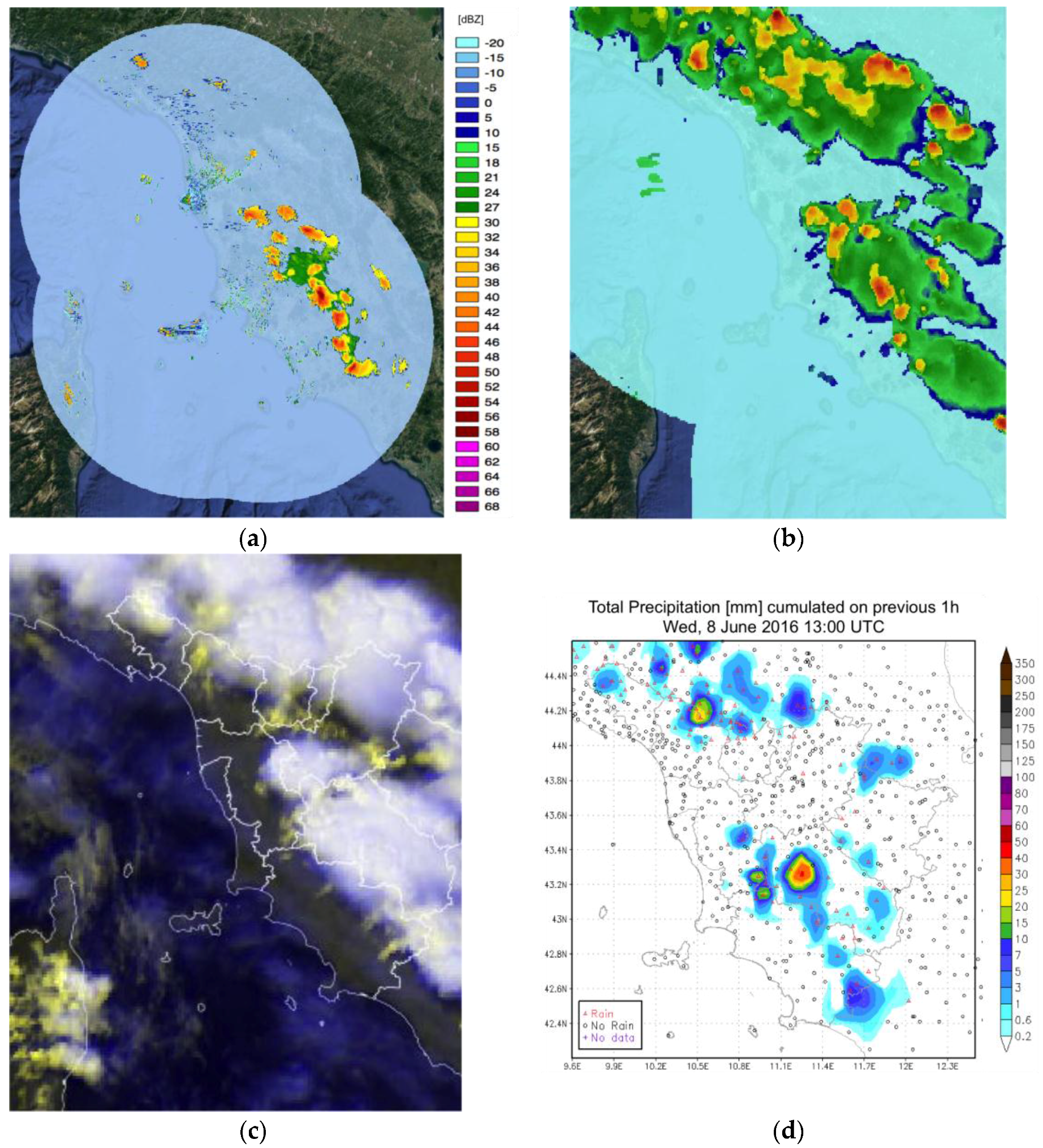
4. Analysis of Three Case Studies
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chang, P.L.; Lin, P.F.; Jou, B.J.D.; Zhang, J. An Application of Reflectivity Climatology in Constructing Radar Hybrid Scans over Complex Terrain. J. Atmos. Ocean. Technol. 2009, 26, 1315–1327. [Google Scholar] [CrossRef]
- Matyas, C.J. Use of Ground-based Radar for Climate-Scale Studies of Weather and Rainfall. Geogr. Compass 2010, 4, 1218–1237. [Google Scholar] [CrossRef]
- Antonini, A.; Melani, S.; Ortolani, A.; Pieri, M.; Gozzini, B. Qualitative weather radar mosaic in a multi-sensor rainfall monitoring approach. J. Appl. Remote Sens. 2012, 6, 063572. [Google Scholar] [CrossRef]
- Mazza, A.; Antonini, A.; Melani, S.; Ortolani, A. Re-calibration of cumulative rainfall estimates by weather radar over a large area. J. Appl. Remote Sens. 2015, 9, 095993. [Google Scholar] [CrossRef]
- Assess the Current and Potential Capabilities of Weather Radars for the Use in WMO Integrated Global Observing System (WIGOS). In Proceedings of the Joint Meeting of the CIMO Expert Team on Remote Sensing Upper-air Technology and Techniques and CBS Expert Team on Surface Based Remote Sensing, Geneva, Switzerland, 23–27 November 2009; Available online: http://www.wmo.int/pages/prog/www/IMOP/meetings/Upper-Air/ET-RSUATT-2/DocPlan.html (accessed on 20 October 2016).
- Antonini, A.; Melani, S.; Corongiu, M.; Mazza, A.; Ortolani, A. Radar Networking over the Tyrrenian Sea. In Proceedings of the 8th European Conference on Radar in Meteorology and Hydrology ERAD 2014, Garmisch-Partenkirchen, Germany, 1–5 September 2014.
- Shah, S.; Notarpietro, R.; Branca, M. Storm Identification, Tracking and Forecasting Using High-Resolution Images of Short-Range X-Band Radar. Atmosphere 2015, 6, 579–606. [Google Scholar] [CrossRef]
- Chandrasekar, V.; Wang, Y.; Chen, H. The CASA quantitative precipitation estimation system: A five year validation study. Nat. Hazards Earth Syst. Sci. 2012, 12, 2811–2820. [Google Scholar] [CrossRef]
- Van de Beek, C.Z.; Leijnse, H.; Stricker, J.N.M.; Uijlenhoet, R.; Russchenberg, H.W.J. Performance of high-resolution X-band radar for rainfall measurement in The Netherlands. Hydrol. Earth Syst. Sci. 2010, 14, 205–221. [Google Scholar] [CrossRef]
- Lengfeld, K.; Clemens, M.; Münster, H.; Ament, F. Performance of high-resolution X-band weather radar networks—The PATTERN example. Atmos. Meas. Tech. 2014, 7, 4151–4166. [Google Scholar] [CrossRef]
- Capozzi, V.; Picciotti, E.; Mazzarella, V.; Budillon, G.; Marzano, F.S. Hail storm hazard in urban areas: Identification and probability of occurrence by using a single-polarization X-band weather radar. Hydrol. Earth Syst. Sci. 2016. [Google Scholar] [CrossRef]
- Lo Conti, F.; Francipane, A.; Pumo, D.; Noto, L.V. Exploring single polarization X-band weather radar potentials for local meteorological and hydrological applications. J. Hydrol. 2015, 531, 508–522. [Google Scholar] [CrossRef]
- McLaughlin, D.; Pepyne, D.; Philips, B.; Kurose, J.; Zink, M.; Westbrook, D.; Lyons, E.; Knapp, E.; Hopf, A.; Defonzo, A.; et al. Short-Wavelength Technology and the Potential For Distributed Networks of Small Radar Systems. Bull. Am. Meteorol. Soc. 2009, 90, 1797–1817. [Google Scholar] [CrossRef]
- Vulpiani, G.; Montopoli, M.; Passeri, L.; Gioia, A.; Giordano, P.; Marzano, F. On the Use of Dual-Polarized C-Band Radar for Operational Rainfall Retrieval in Mountainous Areas. J. Appl. Meteorol. Climatol. 2012, 51, 405–425. [Google Scholar] [CrossRef]
- Mappa Radar. Available online: http://www.protezionecivile.gov.it/jcms/it/mappa_radar.wp (accessed on 1 November 2016).
- Doviak, R.J.; Zrnić, D.S. Doppler Radar and Weather Observations, 2nd ed.; Dover Publications: Mineola, NY, USA, 1993. [Google Scholar]
- International Telecommunication Union. Recommendation ITU-R P.676-11 Attenuation by Atmospheric Gases; International Telecommunication Union: Geneva, Switzerland, 2016. [Google Scholar]
- Heistermann, M.; Jacobi, S.; Pfaff, T. Technical Note: An open source library for processing weather radar data (wradlib). Hydrol. Earth Syst. Sci. 2013, 17, 863–871. [Google Scholar] [CrossRef]
- EPSG Dataset. Available online: http://www.epsg.org/ (accessed on 1 November 2016).
- Photogrammetry Round the World. Photogramm. Rec. 1961, 3, 545–551.
- Advanced Spaceborne, Thermal Emission and Reflection Radiometer. ASTER GDEM Is a Product of METI and NASA. Available online: http://asterweb.jpl.nasa.gov/GDEM.ASP (accessed on 1 November 2016).
- Steiner, M.; Smith, J.A. Use of three-dimensional reflectivity structure for automated detection and removal of non-precipitating echoes in radar data. J. Atmos. Ocean. Technol. 2002, 19, 673–686. [Google Scholar] [CrossRef]
- Steiner, M.; Smith, J.A.; Kessinger, C.; Ferrier, B.S. Evaluation of algorithm parameters for radar data quality control. In Proceedings of the 29th International Conference on Radar Meteorology, Montreal, QC, Canada, 12–16 July 1999; pp. 582–585.
- Moszkowicz, S.; Ciach, G.J.; Krajewski, W.F. Statistical detection of anomalous propagation in radar reflectivity patterns. J. Atmos. Ocean. Technol. 1994, 11, 1026–1034. [Google Scholar] [CrossRef]
- Rosenfeld, D.; Amital, E.; Wolff, D.B. Classification of rain regimes by the three dimensional properties of reflectivity fields. J. Appl. Meteorol. 1995, 34, 198–211. [Google Scholar] [CrossRef]
- Kulie, M.S.; Robinson, M.; Marks, D.A.; Ferrier, B.S.; Rosenfeld, D.; Wolff, D.B. Operational processing of ground validation data for the Tropical Rainfall Measuring Mission. In Proceedings of the 29th International Conference on Radar Meteorology, Montreal, QC, Canada, 12–16 July 1999; pp. 736–739.
- Grecu, M.; Krajewski, W.E. An efficient methodology for detection of anomalous propagation echoes in radar reflectivity data using neural networks. J. Atmos. Ocean. Technol. 2000, 17, 121–129. [Google Scholar] [CrossRef]
- Smith, J.A.; Baeck, M.L.; Steiner, M.; Bauer-Messmer, B.; Zhao, W.; Tapia, A. Hydrometeorological Assessments of the NEXRAD Rainfall Algorithms; NOAA National Weather Service Final Report; Office of Hydrology—Hydrologic Research Laboratory: Silver Springs, MA, USA, 1996; p. 59.
- Kessinger, C.; Ellis, S. The radar echo classifier: A fuzzy logic algorithm for the WSR-88D. In Proceedings of the 3rd Conference on Artificial Intelligence Applications to the Environmental Science, Long Beach, CA, USA, 9–13 February 2003; pp. 1–11.
- Lee, R.; della Bruna, G.; Joss, J. Intensity of ground clutter and of echoes of anomalous propagation and its elimination. In Proceedings of the 27th Conference on Radar Meteorology, Vail, CO, USA, 9–13 October 1995; pp. 651–652.
- Andersson, T.; Alberoni, P.P.; Mezzasalma, P.; Michelson, D.B.; Nanni, S. Anomalous propagation: Identification from terrain and sea waves using vertical reflectivity profile analysis. In Proceedings of the 28th Conference on Radar Meteorology, Austin, TX, USA, 7–12 September 1997; pp. 93–94.
- Bellon, A.; Kilambi, A. Updates to the McGill RAPID (Radar Data Analysis, Processing and Interactive Display) system. In Proceedings of the 29th Conference on Radar Meteorology, Montreal, QC, Canada, 12–16 July 1999; pp. 121–124.
- Lee, G.W.; Cho, Y.-H.; Kim, K.-E.; Zawadzki, I. Identification and removal of non-precipitation echoes using the characteristics of radar echoes. In Proceedings of the 29th Conference on Radar Meteorology, Albuquerque, NM, USA, 23–29 October 2005.
- Trapp, R.J.; Doswell, C.A., III. Radar data objective analysis. J. Atmos. Ocean. Technol. 2000, 17, 105–120. [Google Scholar] [CrossRef]
- Andrieu, H.; Creutin, J.-D.; Faure, D. Use of a weather radar for the hydrology of a mountainous area. Part I: Radar measurement interpretation. J. Hydrol. 1997, 193, 1–25. [Google Scholar] [CrossRef]
- Aoyagi, J. A study on the MTI weather radar system for rejecting ground clutter. Pap. Meteorol. Geophys. 1983, 33, 187–243. [Google Scholar] [CrossRef] [Green Version]
- Passarelli, R.E., Jr. Parametric estimation of Doppler spectral moments: An alternative ground clutter rejection technique. ]. Clim. Appl. Meteorol. 1983, 22, 850–857. [Google Scholar] [CrossRef]
- Sugier, J.; Chatelet, J.P.D.; Roquain, P.; Smith, A. Detection and removal of clutter and anaprop in radar datausing a statistical scheme based on echo fluctuation. Proc. ERAD 2002, 17–24. Available online: http://copernicus.org/erad/online/erad-17.pdf / (accessed on 1 November 2016). [Google Scholar]
- Wessels, H.R.A.; Beekhuis, J.H. Automatic Suppression of Anomalous Propagation Clutter for Noncoherent Weather Radars; Scientific Report WR-92-06; Royal Netherlands Meteorological Institute (KNMI): De Bilt, The Netherlands, 1992. [Google Scholar]
- Holleman, I.; Beekhuis, H. Review of the KNMI Clutter Removal Scheme; Technical Report, KNMI TR-284; Royal Netherlands Meteorological Institute (KNMI): De Bilt, The Netherlands, 2004; Available online: https://www.researchgate.net/profile/Hans_Beekhuis/publication/265355631_Review_of_the_KNMI_clutter_removal_scheme/links/54d881bd0cf2970e4e77e3c7.pdf (accessed on 1 September 2016).
- Orville, H.D.; Kopp, F.J.; Myers, C.G. The dynamics and thermodynamics of precipitation loading. Pure Appl. Geophys. 1975, 113, 983–1004. [Google Scholar] [CrossRef]
- NEXRAD Products. Available online: https://www.ncdc.noaa.gov/data-access/radar-data/nexrad-products (accessed on 1 November 2016).
- Zhang, J.; Langston, C.; Howard, K. Brightband Identification Based on Vertical Profiles of Reflectivity from the WSR-88D. J. Atmos. Ocean. Technol. 2008, 25, 1859–1872. [Google Scholar] [CrossRef]
- Nicol, J.C.; Illingworth, A.J.; Darlington, T.; Sugier, J. Techniques for improving ground clutter identification. In Weather Radar and Hydrology, Proceedings of the Exeter Symposium, Exeter, UK, 18–21 April 2011; Moore, R.J., Cole, S.J., Illingworth, A.J., Eds.; IAHS Press: Wallingford, UK, 2011; pp. 45–51. [Google Scholar]
- Berenguer, M.; Sempere-Torres, D.; Corral, C.; Sánchez-Diezma, R. A fuzzy logic technique for identifying nonprecipitating echoes in radar scans. J. Atmos. Ocean. Technol. 2006, 23, 1157–1180. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Operating frequency | 9.410 ± 0.03 GHz |
| Peak power | 10 kW |
| Pulse width | 0.6 μs |
| Pulse Repetition Frequency | 800 Hz |
| Receiver dynamics | >90 dB, 8 bits codify |
| Sensitivity | 10 dBZ @ 25 km |
| Noise figure | <4 dB |
| Minimum Detectable Signal | <−100 dB |
| Antenna type | Circular Pencil beam diameter 70 cm |
| Antenna 3 dB lobe | <3.2° in elevation and in azimuth |
| Antenna gain | 35/40 dB |
| Antenna speed | 20°/s |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Antonini, A.; Melani, S.; Corongiu, M.; Romanelli, S.; Mazza, A.; Ortolani, A.; Gozzini, B. On the Implementation of a Regional X-Band Weather Radar Network. Atmosphere 2017, 8, 25. https://doi.org/10.3390/atmos8020025
Antonini A, Melani S, Corongiu M, Romanelli S, Mazza A, Ortolani A, Gozzini B. On the Implementation of a Regional X-Band Weather Radar Network. Atmosphere. 2017; 8(2):25. https://doi.org/10.3390/atmos8020025
Chicago/Turabian StyleAntonini, Andrea, Samantha Melani, Manuela Corongiu, Stefano Romanelli, Alessandro Mazza, Alberto Ortolani, and Bernardo Gozzini. 2017. "On the Implementation of a Regional X-Band Weather Radar Network" Atmosphere 8, no. 2: 25. https://doi.org/10.3390/atmos8020025
APA StyleAntonini, A., Melani, S., Corongiu, M., Romanelli, S., Mazza, A., Ortolani, A., & Gozzini, B. (2017). On the Implementation of a Regional X-Band Weather Radar Network. Atmosphere, 8(2), 25. https://doi.org/10.3390/atmos8020025