
Mechanism Study of Two-Dimensional Precipitation Diagnostic Models Within a Dynamic Framework




Abstract
1. Introduction
2. Physical Model Methods
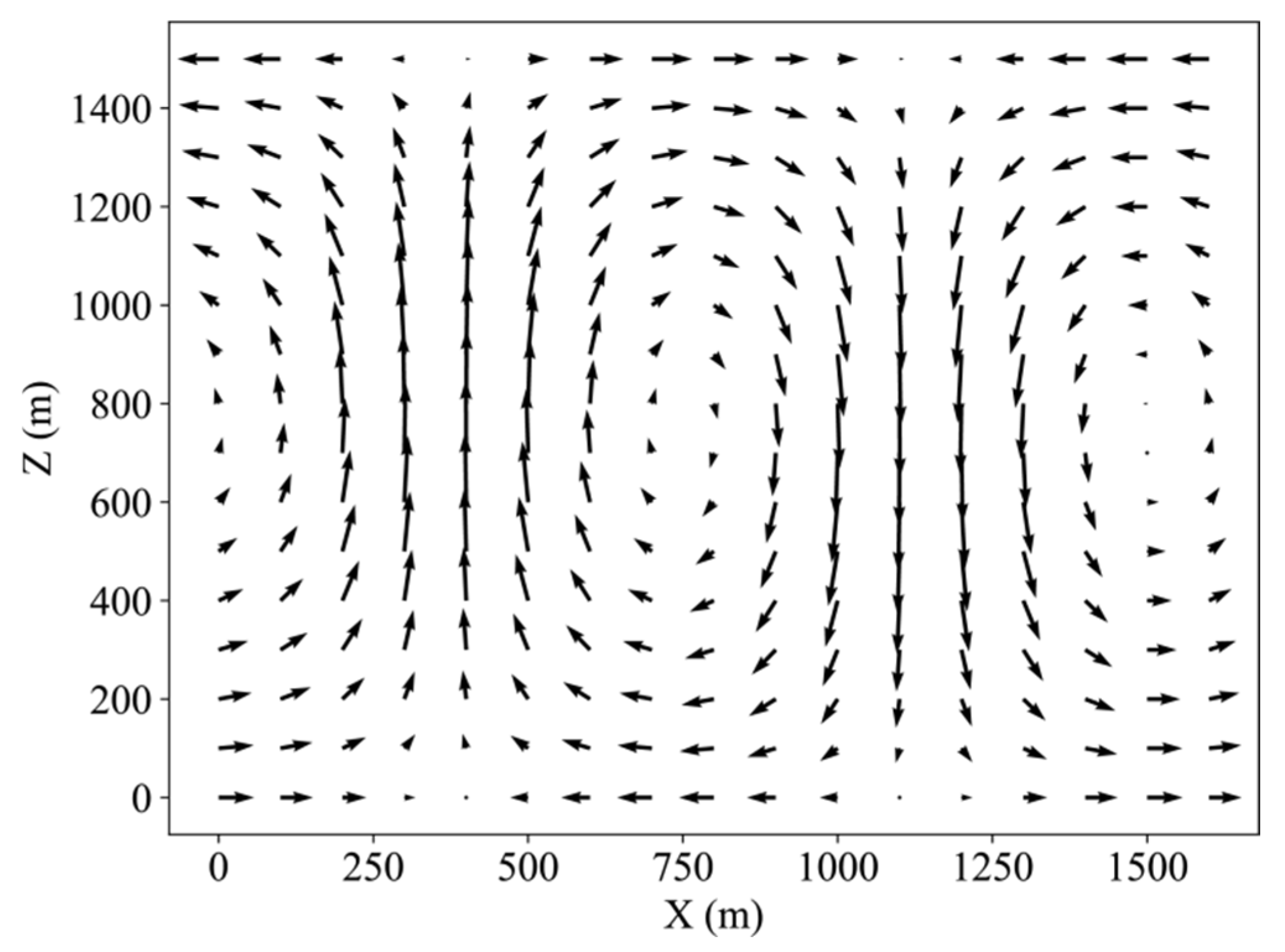
2.1. Initial Field Setup
2.2. Data Description and Model Specification
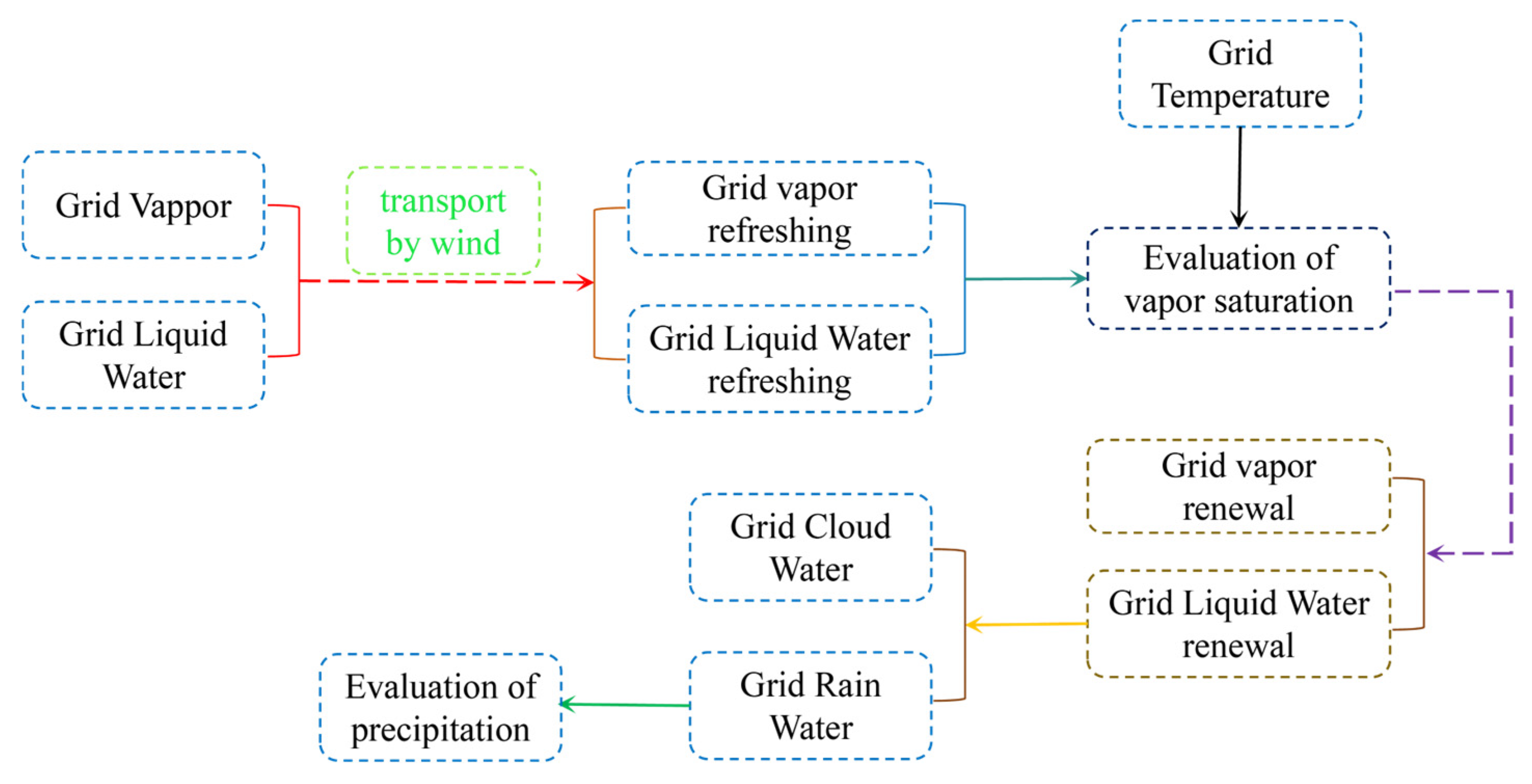
2.3. Water Vapor Condensation
2.4. Material Transport
2.5. Temperature Equation
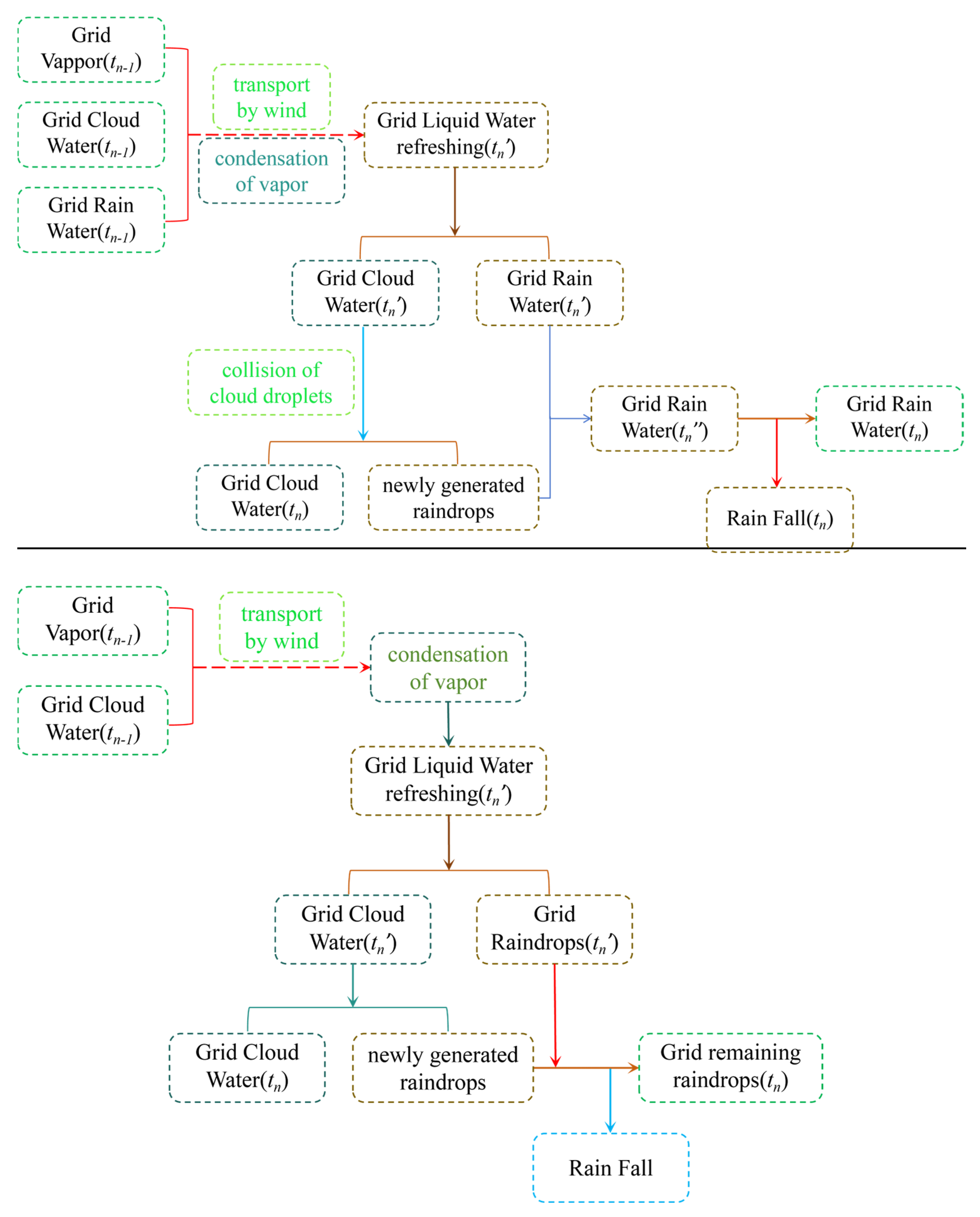
3. Design of the Precipitation Model
4. Results
4.1. Model Calculation Results
4.2. Model Computational Efficiency
5. Discussion
6. Conclusions
- (I)
- In this study, we constructed a hypothetical vortex wind field model to simulate the transport and phase transitions of water vapor and liquid water, achieving efficient computation while effectively replicating the associated physical processes. Moving forward, we aim to utilize radar inversion technology to obtain actual wind field data, which will serve as the model’s driving force to investigate the accuracy of precipitation simulation under true wind conditions. This approach will offer critical technical support for assessing and refining precipitation models, enhancing the reliability and utility of the simulation outcomes.
- (II)
- This study developed a diagnostic model that comprehensively simulates the water vapor condensation process, taking into account the controlling influence of atmospheric temperature and pressure. The model precisely captures the decreasing threshold of saturated vapor content as altitude rises and temperature drops. As lower-level water vapor is lifted to higher atmospheric layers, it condenses into liquid water, leading to cloud formation. Our model not only replicates the condensation process but also reveals stratification with increasing height, offering a robust tool for understanding precipitation formation dynamics.
- (III)
- Simulating precipitation is a multifaceted and complex process influenced by atmospheric dynamics, water vapor transport, and condensation lift, and is constrained by the chosen precipitation algorithms. Accurate representation of the precipitation formation process is crucial for computational outcomes. Nevertheless, due to the complexity of precipitation mechanisms and limitations in experimental data acquisition, our understanding of precipitation simulation remains incomplete and uncertain.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guo, J.; Xu, X.J.; Lian, W.W.; Zhu, H.L. A new approach for interval forecasting of photovoltaic power based on generalized weather classification. Int. Trans. Electr. Energy Syst. 2019, 29, e2802. [Google Scholar] [CrossRef]
- Guo, J.; Liu, Y.; Zou, Q.; Ye, L.; Zhu, S.; Zhang, H. Study on optimization and combination strategy of multiple daily runoff prediction models coupled with physical mechanism and LSTM. J. Hydrol. 2023, 624, 129969. [Google Scholar]
- Chang, X.; Guo, J.; Qin, H.; Huang, J.; Wang, X.; Ren, P. Single-Objective and Multi-Objective Flood Interval Forecasting Considering Interval Fitting Coefficients. Water Resour. Manag. 2024, 38, 3953–3972. [Google Scholar] [CrossRef]
- Turner, R.; McConney, P.; Monnereau, I. Climate Change Adaptation and Extreme Weather in the Small-Scale Fisheries of Dominica. Coast. Manag. 2020, 48, 436–455. [Google Scholar] [CrossRef]
- Zhang, S.; Solari, G.; De Gaetano, P.; Burlando, M.; Repetto, M.P. A refined analysis of thunderstorm outflow characteristics relevant to the wind loading of structures. Probabil. Eng. Mech. 2017, 54, 9–24. [Google Scholar] [CrossRef]
- Kurowski, M.J.; Wojcik, D.K.; Ziemianski, M.Z.; Rosa, B.; Piotrowski, Z.P. Convection-permitting regional weather modeling with COSMO-EULAG: Compressible and anelastic solutions for a typical westerly flow over the Alps. Mon. Weather Rev. 2016, 144, 1961–1982. [Google Scholar] [CrossRef]
- Garcia-Dorado, I.; Aliaga, D.G.; Bhalachandran, S.; Schmid, P.; Niyogi, D. Fast Weather Simulation for Inverse Procedural Design of 3D Urban Models. ACM Trans. Graph. 2017, 36, 21. [Google Scholar]
- Wei, X.; Liu, Y.; Guo, J.; Chang, X.; Li, H. Applicability Study of Euler–Lagrange Integration Scheme in Constructing Small-Scale Atmospheric Dynamics Models. Atmosphere 2024, 15, 644. [Google Scholar] [CrossRef]
- Makarieva, A.M.; Gorshkov, V.G.; Nefiodov, A.V.; Sheil, D.; Nobre, A.D.; Bunyard, P.; Nobre, P.; Li, B. The equations of motion for moist atmospheric air. J. Geophys. Res. Atmos. 2017, 122, 7300–7307. [Google Scholar] [CrossRef]
- Oreskovic, C.; Savory, E.; Porto, J.; Orf, L.G. Evolution and scaling of a simulated downburst-producing thunderstorm outflow. Wind. Struct. 2018, 26, 147–161. [Google Scholar]
- Zhou, Y.; Li, X. An Analysis of Thermally-Related Surface Rainfall Budgets Associated with Convective and Stratiform Rainfall. Adv. Atmos. Sci. 2011, 28, 1099–1108. [Google Scholar]
- Engin, L.; Gokhan, A.; Tuncer, I.H. Wind potential estimations based on unsteady turbulent flow solutions coupled with a mesoscale weather prediction model. In Proceedings of the 7th Ankara International Aerospace Conference, Ankara, Turkey, 11–13 September 2013. [Google Scholar]
- Wei, X.; Liu, Y.; Chang, X.; Guo, J.; Li, H. Numerical Simulation of Terrain-Adaptive Wind Field Model Under Complex Terrain Conditions. Water 2024, 16, 2138. [Google Scholar] [CrossRef]
- Choi, H.W.; Kim, D.Y.; Kim, J.J.; Kim, K.Y.; Woo, J.H. Study on Dispersion Characteristics for Fire Scenarios in an Urban Area Using a CFD-WRF Coupled Model. Atmosphere 2012, 22, 47–55. [Google Scholar] [CrossRef]
- Miao, J.-E.; Yang, M.-J. A Modeling Study of the Severe Afternoon Thunderstorm Event at Taipei on 14 June 2015: The Roles of Sea Breeze, Microphysics, and Terrain. J. Meteorol. Soc. Jpn. 2020, 98, 129–152. [Google Scholar]
- Groot, E.; Tost, H. Analysis of variability in divergence and turn-over induced by three idealized convective systems with a 3D cloud resolving model. Atmos. Chem. Phys. 2020, 2020, 1–23. [Google Scholar] [CrossRef]
- Guo, Z.; Zhao, J.; Zhao, P.; He, M.; Yang, Z.; Su, D. Simulation Study of Microphysical and Electrical Processes of a Thunderstorm in Sichuan Basin. Atmosphere 2023, 14, 574. [Google Scholar] [CrossRef]
- Pu, Z.; Lin, C.; Dong, X.; Krueger, S.K. Sensitivity of Numerical Simulations of a Mesoscale Convective System to Ice Hydrometeors in Bulk Microphysical Parameterization. Pure Appl. Geophys. 2019, 176, 2097–2120. [Google Scholar] [CrossRef]
- Poulsen, T.; Niclasen, B.A.; Giebel, G.; Beyer, H.G. Validation of WRF generated wind field in complex terrain. Meteorol. Z. 2021, 30, 413–428. [Google Scholar] [CrossRef]
- Noh, I.; Lee, S.-J.; Lee, S.; Kim, S.-J.; Yang, S.-D. A High-Resolution (20 m) Simulation of Nighttime Low Temperature Inducing Agricultural Crop Damage with the WRF–LES Modeling System. Atmosphere 2021, 12, 1562. [Google Scholar] [CrossRef]
- Putnam, B.J.; Xue, M.; Jung, Y.; Zhang, G.; Kong, F. Simulation of Polarimetric Radar Variables from 2013 CAPS Spring Experiment Storm-Scale Ensemble Forecasts and Evaluation of Microphysics Schemes. Mon. Weather Rev. 2017, 145, 49–73. [Google Scholar]
- Martynova, Y.V.; Zaripov, R.B.; Krupchatnikov, V.N.; Petrov, A.P. Estimation of the quality of atmospheric dynamics forecasting in the siberian region using the wrf-arw mesoscale model. Russ. Meteorol. Hydrol. 2014, 39, 440–447. [Google Scholar] [CrossRef]
- Xue, H.; Li, J.; Zhang, Q.; Gu, H. Simulation of the Effect of Small-Scale Mountains on Weather Conditions During the May 2021 Ultramarathon in Gansu Province, China. J. Geophys. Res. Atmos. JGR 2022, 127, e2022JD036465. [Google Scholar]
- Arabas, S.; Jaruga, A.; Pawlowska, H.; Grabowski, W.W. libcloudph++ 0.2: Single-moment bulk, double-moment bulk, and particle-based Diagnostic microphysics library in C++. Geosci. Model. Dev. Discuss. 2014, 7, 8275–8360. [Google Scholar]
- Morrison, H.; Grabowski, W.W. Comparison of Bulk and Bin Warm-Rain Microphysics Models Using a Kinematic Framework. J. Atmos. Sci. 2006, 64, 2839–2861. [Google Scholar]
- Rasinski, P.; Pawlowska, H.; Grabowski, W.W. Observations and kinematic modeling of drizzling marine stratocumulus. Atmos. Res. 2011, 102, 120–135. [Google Scholar] [CrossRef]
- Bolton, D. The Computation of Equivalent Potential Temperature. Mon. Weather Rev. 1980, 108, 1046–1053. [Google Scholar]
- Schneider, T.; O′Gorman, P.A.; Levine, X.J. Water vapor and the dynamics of climate change. Rev. Geophys. 2010, 48, RG3001. [Google Scholar] [CrossRef]
- Grell, G.A.; Dudhia, J.; Stauffer, D.R. A Description of the Fifth-Generation Penn State/NCAR Mesoscale Model (MM5); Technical Report NCAR/TN-398+STR; National Center for Atmospheric Research: Boulder, CO, USA, 1994. [Google Scholar]
- Cullen, M.J.P.; Davies, T. A conservative split-explicit integration scheme with fourth-order horizontal advection. Q. J. R. Meteorol. Soc. 1991, 117, 993–1002. [Google Scholar]
- Leslie, L.M.; Purser, R.J. High-Order Numerics in an Unstaggered Three-Dimensional Time-Split Semi-Lagrangian Forecast Model. Mon. Weather Rev. 2009, 119, 1612–1623. [Google Scholar] [CrossRef]
- Tremback, C.J.; Powell, J.; Cotton, W.R.; Pielke, R.A. The Forward–in-Time Upstream Advection Scheme: Extension to Higher Orders. Mon. Weather Rev. 1987, 115, 540–555. [Google Scholar] [CrossRef]
- Rothenberg, D.; Wang, C. Metamodeling of Droplet Activation for Global Climate Models. J. Atmos. Sci. 2016, 73, 1255–1272. [Google Scholar] [CrossRef]
- Yang, F.; Kollias, P.; Shaw, R.A.; Vogelmann, A.M. Cloud droplet size distribution broadening during diffusional growth: Ripening amplified by deactivation and reactivation. Atmos. Chem. Phys. 2018, 18, 7313–7328. [Google Scholar] [CrossRef]
- Jaruga, A.; Pawlowska, H. libcloudph++2.0: Aqueous-phase chemistry extension of the particle-based cloud microphysics scheme. Geosci. Model Dev. 2018, 11, 3623–3645. [Google Scholar] [CrossRef]
- Allen, G.; Coe, H.; Clarke, A.; Bretherton, C.; Wood, R.; Abel, S.J.; Barrett, P.; Brown, P.; George, R.; Freitag, S.; et al. South East Pacific atmospheric composition and variability sampled along 20 degrees S during VOCALS-REx. Atmos. Chem. Phys. 2011, 11, 5237–5262. [Google Scholar] [CrossRef]
- Nober, F.J.; Graf, H.F. A new convective cloud field model based on principles of self-organisation. Atmos. Chem. Phys. 2004, 4, 3669–3698. [Google Scholar] [CrossRef]
- Seifert, A.; Beheng, K.D. A double-moment parameterization for simulating autoconversion, accretion and selfcollection. Atmos. Res. 2001, 59, 265–281. [Google Scholar] [CrossRef]
- Bott, A. A flux method for the numerical solution of the stochastic collection equation. J. Atmos. Sci. 1998, 55, 2284–2293. [Google Scholar] [CrossRef]
- Lebo, Z.J.; Seinfeld, J.H. A continuous spectral aerosol-droplet microphysics model. Atmos. Chem. Phys. Discuss. 2011, 11, 23655–23705. [Google Scholar] [CrossRef]
- Chiu, J.C.; Yang, C.K.; Jan van Leeuwen, P.; Feingold, G.; Wood, R.; Blanchard, Y.; Mei, F.; Wang, J. Observational Constraints on Warm Cloud Microphysical Processes Using Machine Learning and Optimization Techniques. Geophys. Res. Lett. 2021, 48, e2020GL091236. [Google Scholar] [CrossRef]
- Axel, S.; Stephan, R. Potential and Limitations of Machine Learning for Modeling Diagnostic Cloud Microphysical Processes. J. Adv. Model. Earth Syst. 2020, 12, e2020MS002301. [Google Scholar]
- Khairoutdinov, M.; Kogan, Y. A new cloud physics parameterization in a large-eddy simulation model of marine stratocumulus. Mon. Weather Rev. 2000, 128, 229–243. [Google Scholar]
- Berry, E.X. Modification of the warm rain process. National Conference on Weather Modification. Amer. Meteor. Soc. 1968, 49, 154. [Google Scholar]
- Sylwester, A.; Shin-ichiro, S. On the CCN (de) activation nonlinearities. Nonlinear Process. Geophys. 2017, 24, 535–542. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Consumption | Number of Iteration Time Steps |
|---|---|
| 11.8 s | 10 |
| 24.5 s | 20 |
| 40.3 s | 40 |
| 79.4 s | 80 |
| 108.5 s | 120 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, X.; Liu, Y.; Chang, X.; Guo, J.; Li, H. Mechanism Study of Two-Dimensional Precipitation Diagnostic Models Within a Dynamic Framework. Atmosphere 2025, 16, 380. https://doi.org/10.3390/atmos16040380
Wei X, Liu Y, Chang X, Guo J, Li H. Mechanism Study of Two-Dimensional Precipitation Diagnostic Models Within a Dynamic Framework. Atmosphere. 2025; 16(4):380. https://doi.org/10.3390/atmos16040380
Chicago/Turabian StyleWei, Xiangqian, Yi Liu, Xinyu Chang, Jun Guo, and Haochuan Li. 2025. "Mechanism Study of Two-Dimensional Precipitation Diagnostic Models Within a Dynamic Framework" Atmosphere 16, no. 4: 380. https://doi.org/10.3390/atmos16040380
APA StyleWei, X., Liu, Y., Chang, X., Guo, J., & Li, H. (2025). Mechanism Study of Two-Dimensional Precipitation Diagnostic Models Within a Dynamic Framework. Atmosphere, 16(4), 380. https://doi.org/10.3390/atmos16040380